
Experience Gained When Using the Yuneec E10T Thermal Camera in Environmental Research


Abstract
:1. Introduction
2. Materials and Methods
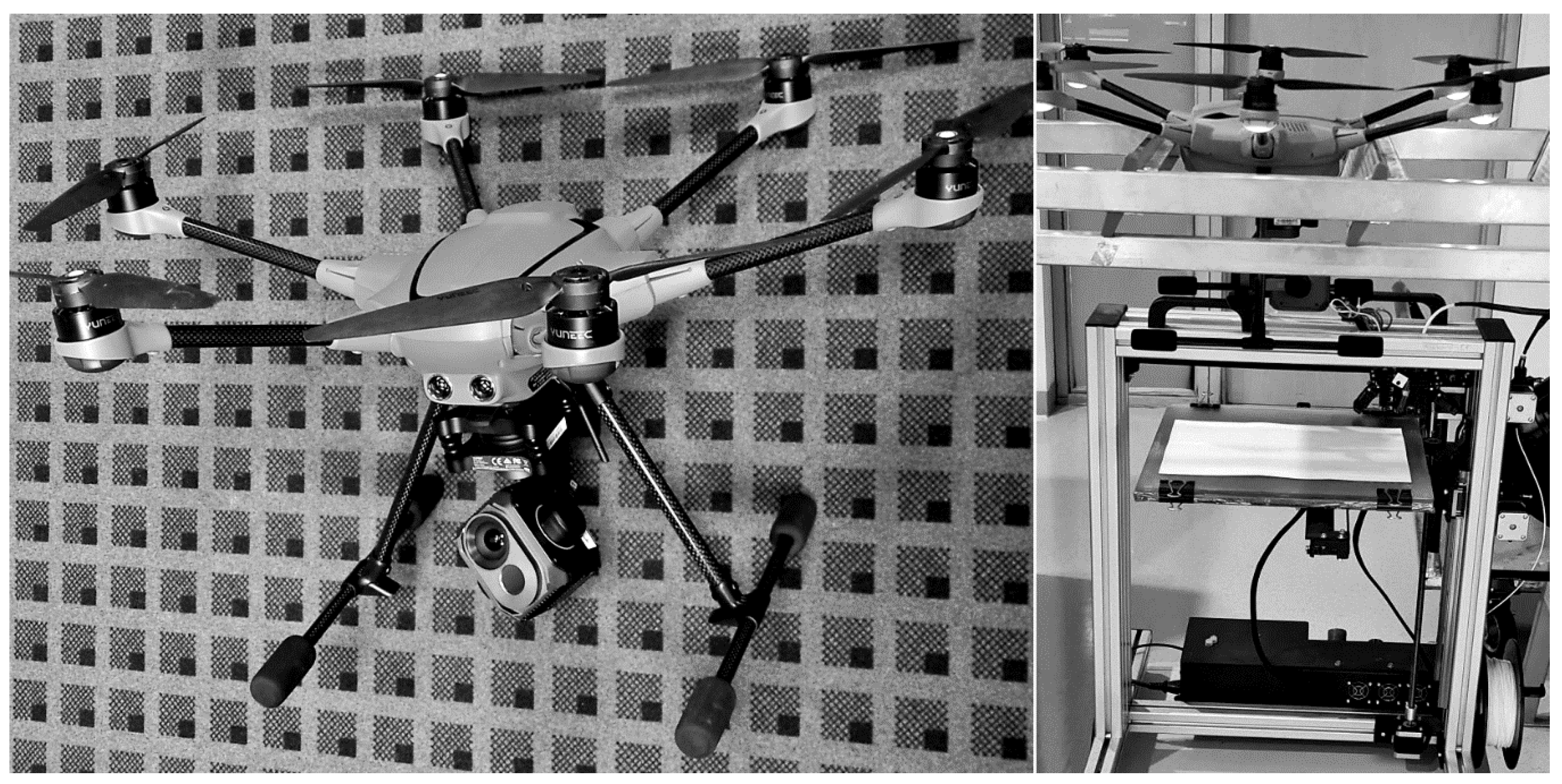
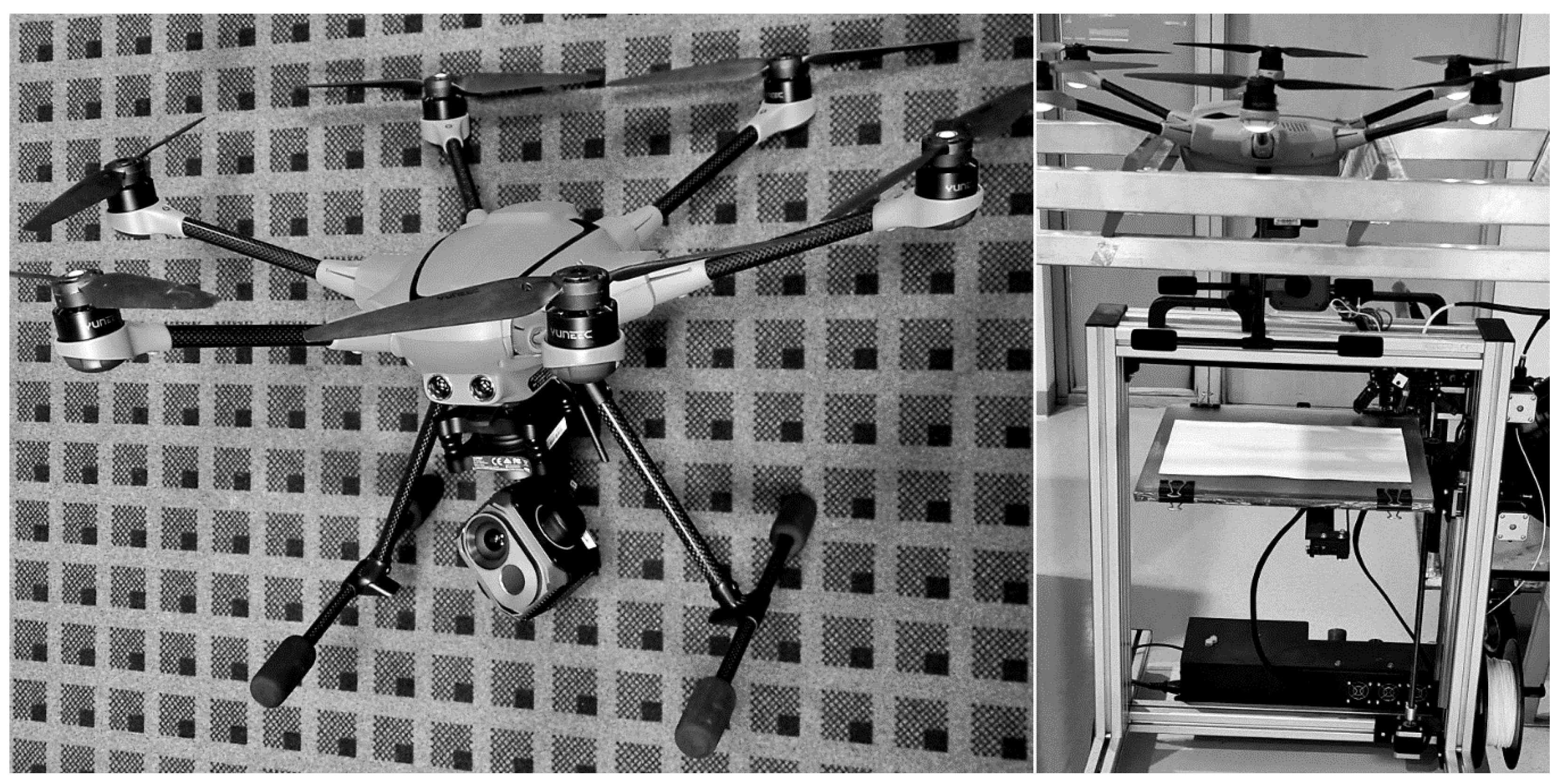
2.1. Drone and Thermal Sensor
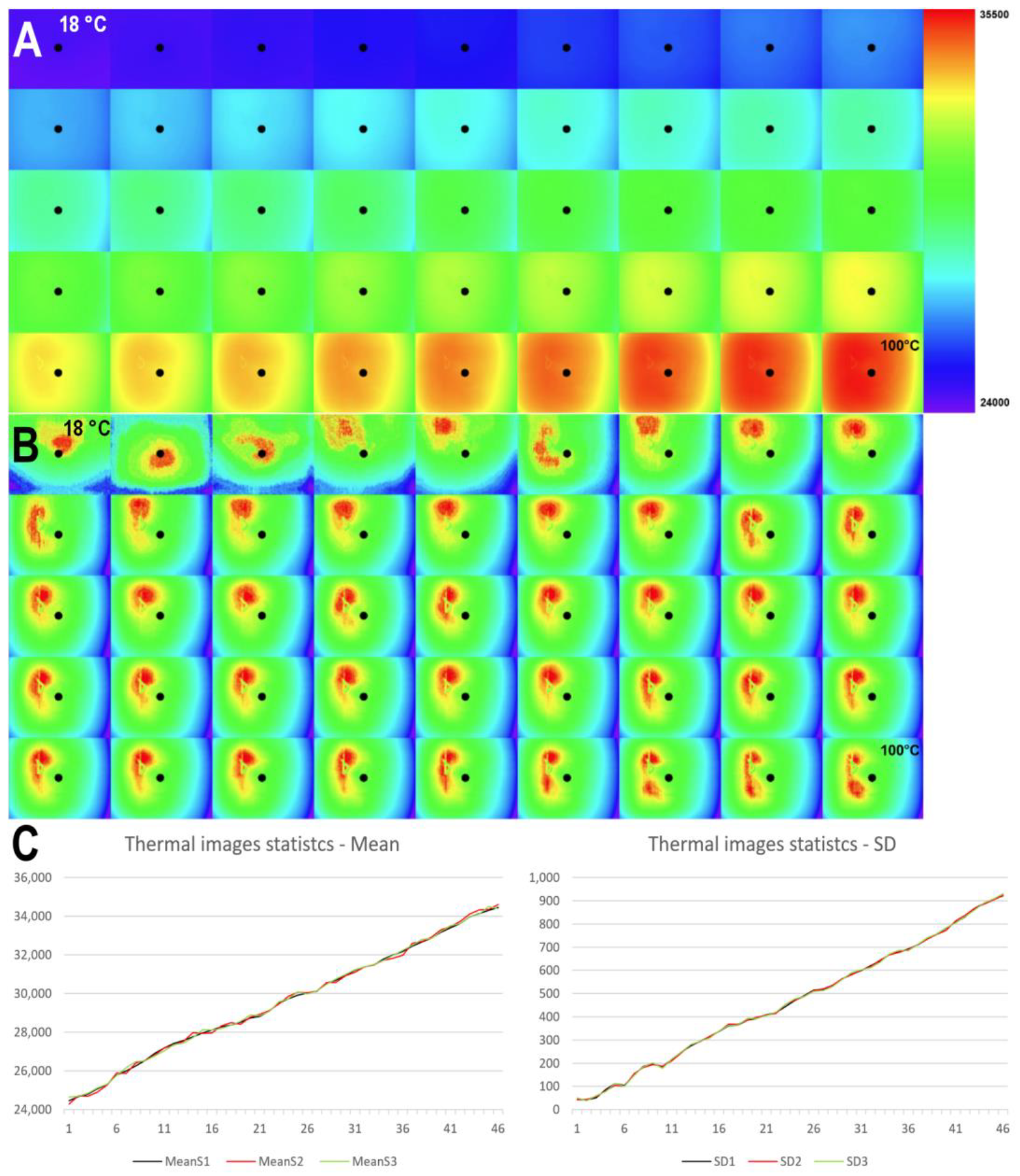
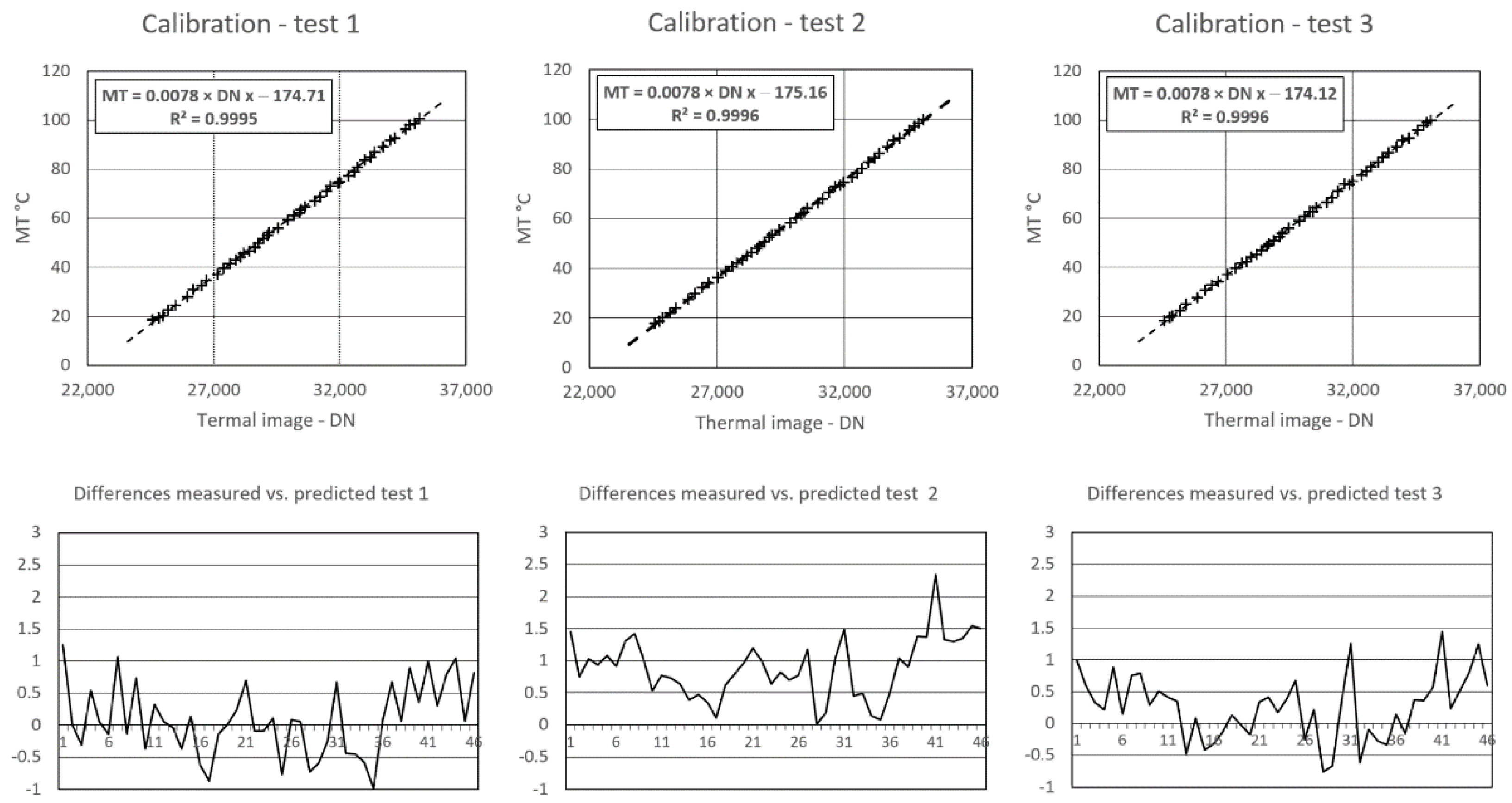
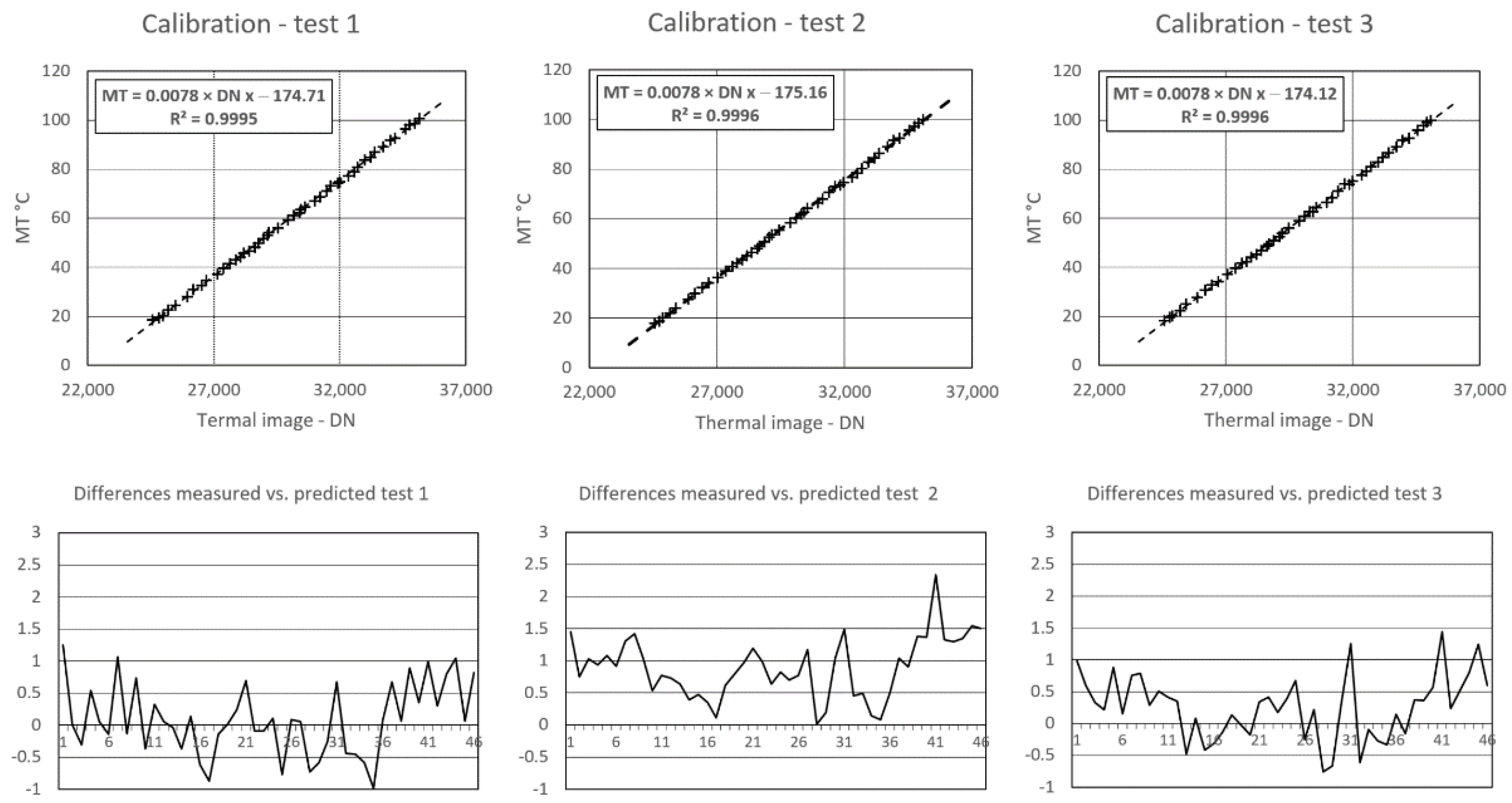
2.2. Radiometric Calibration
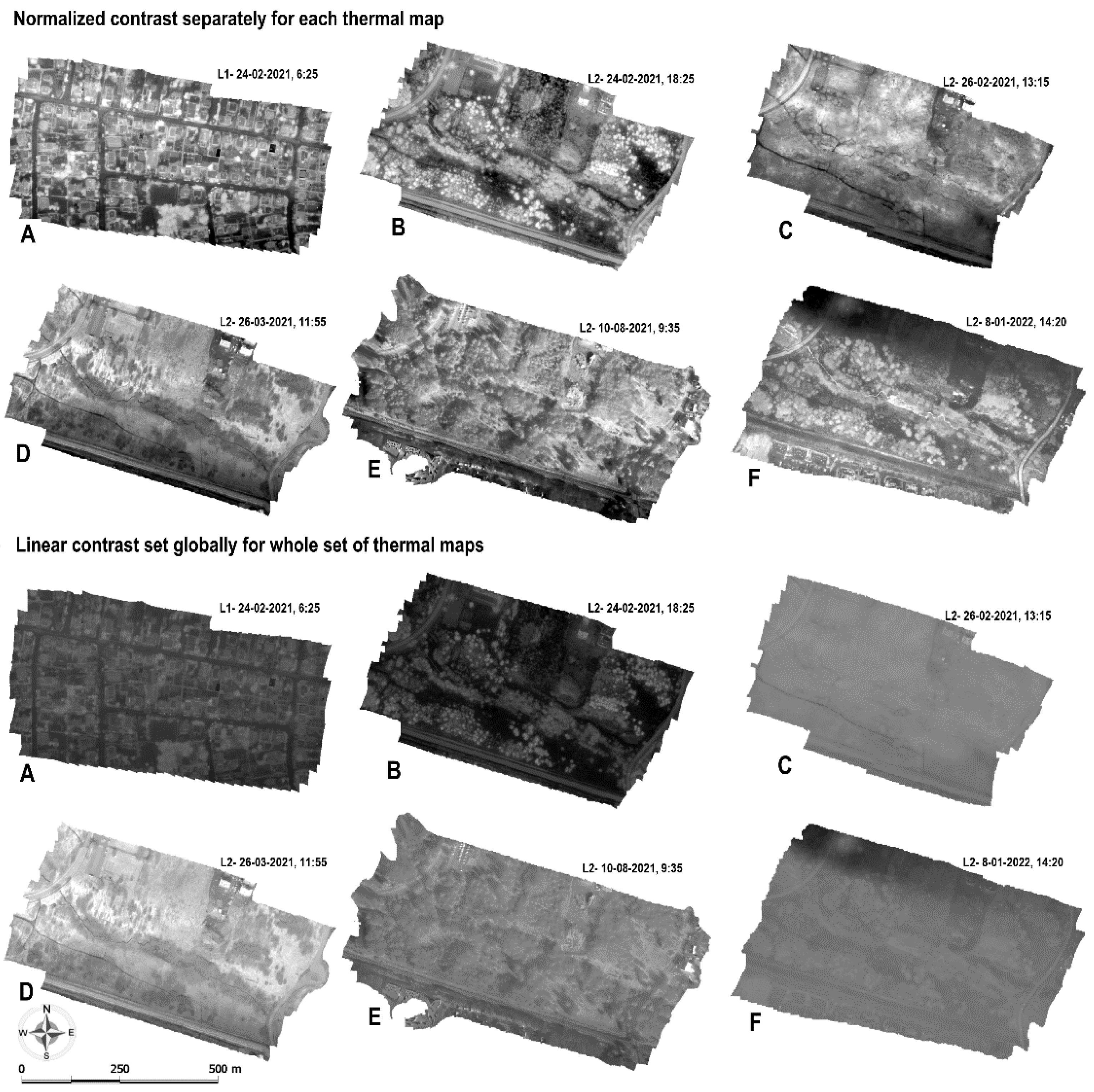
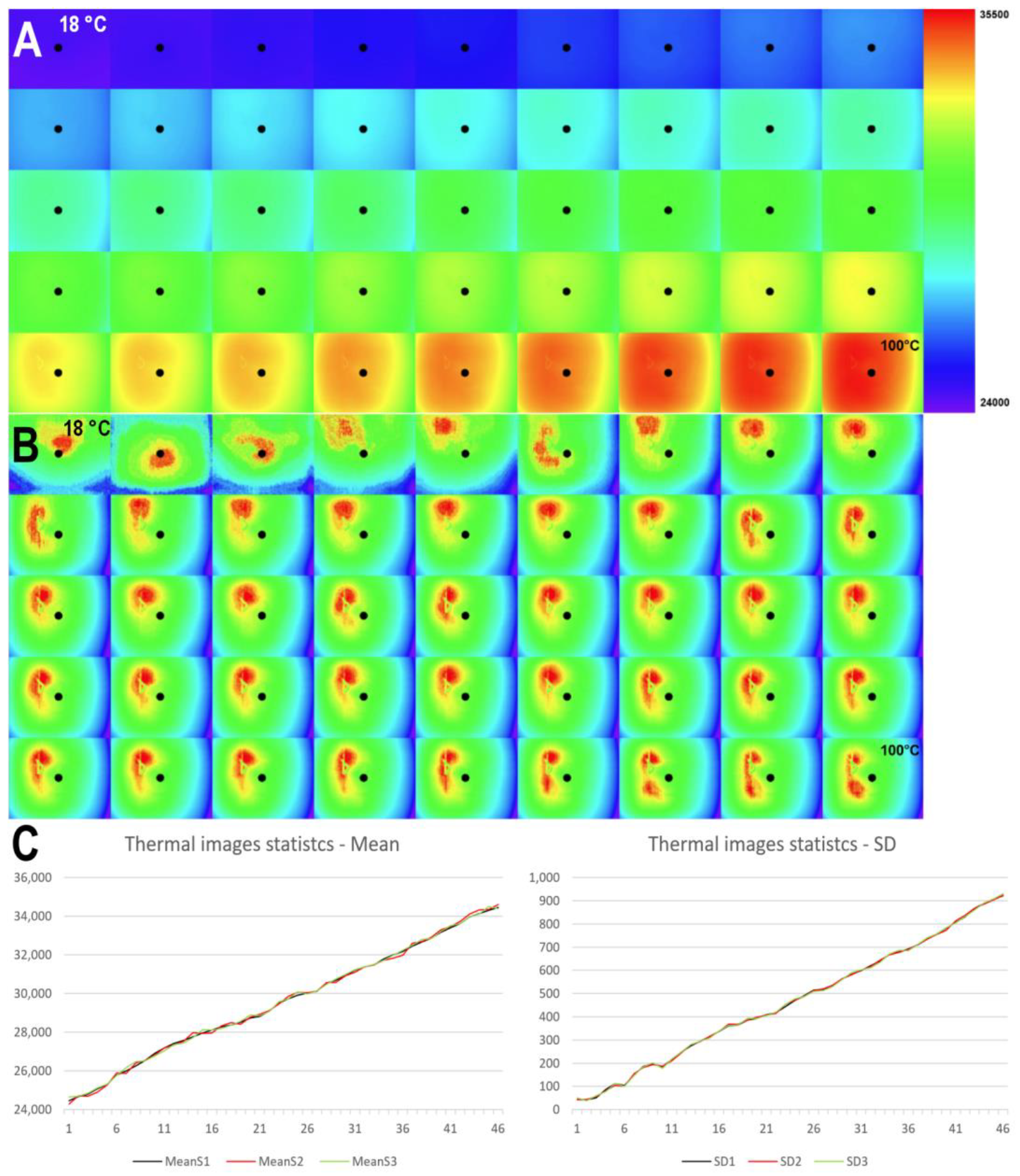
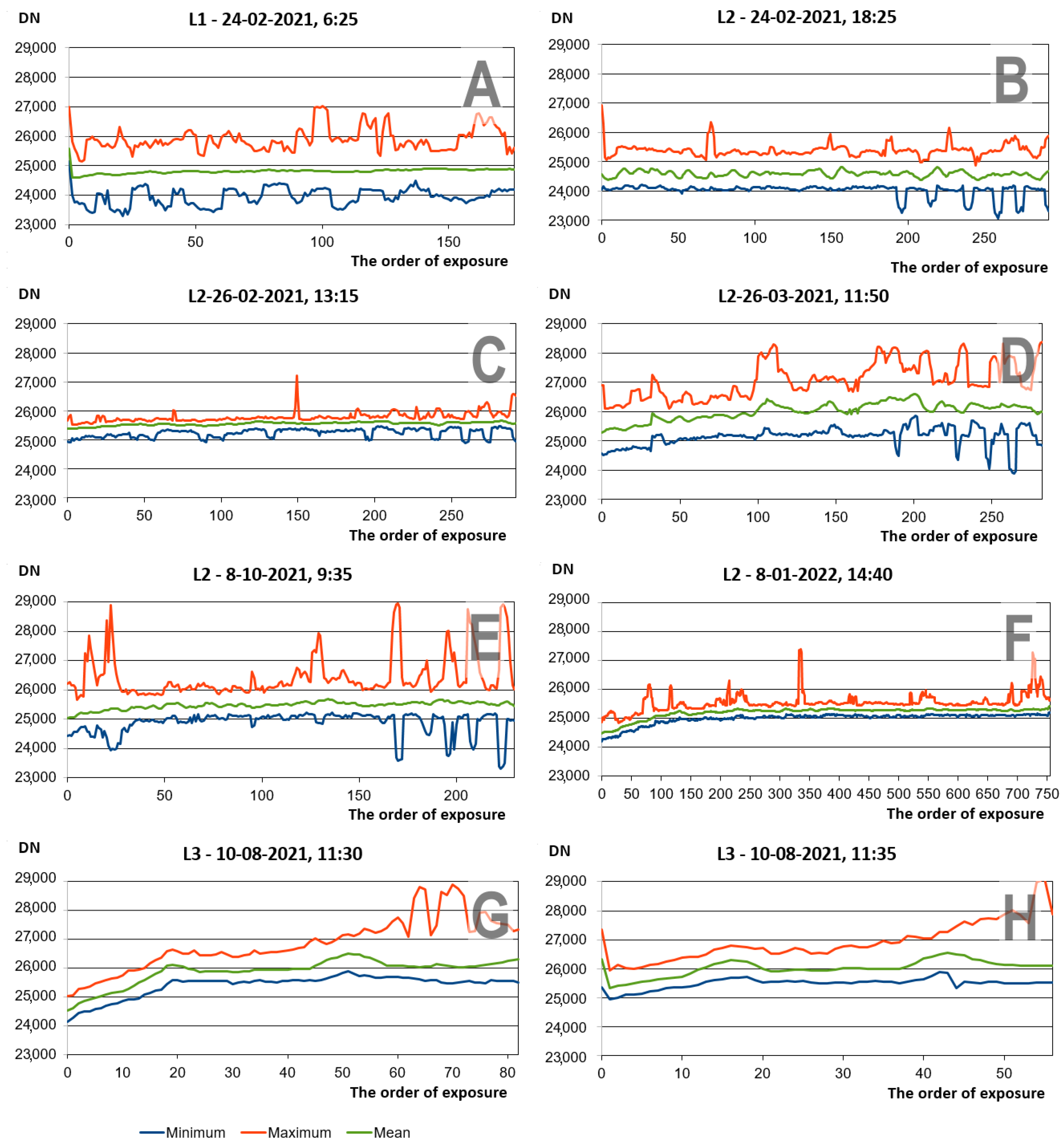
2.3. Analysis of Statistical Parameters of Thermal Image Sets
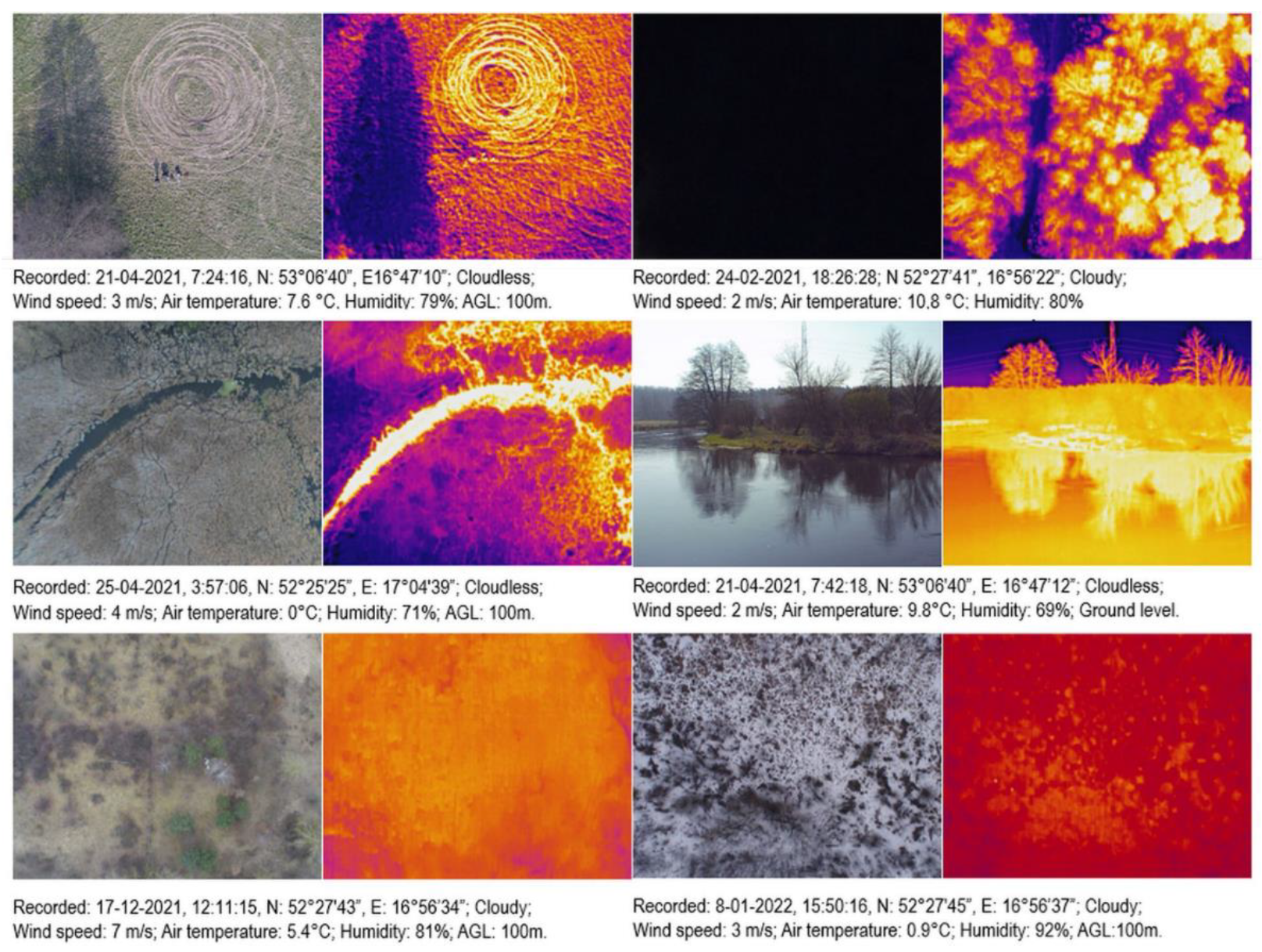
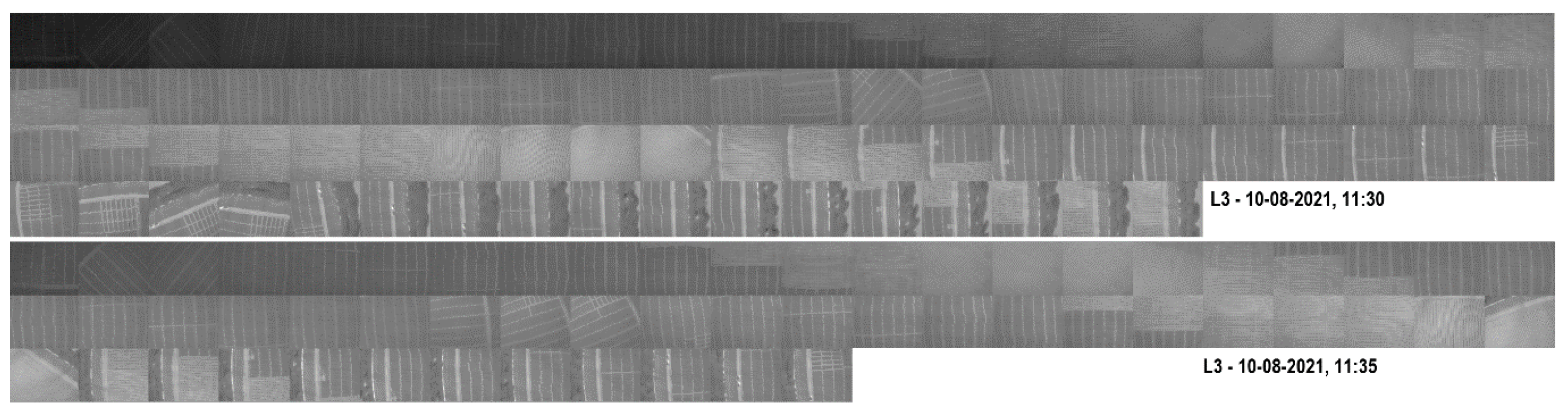
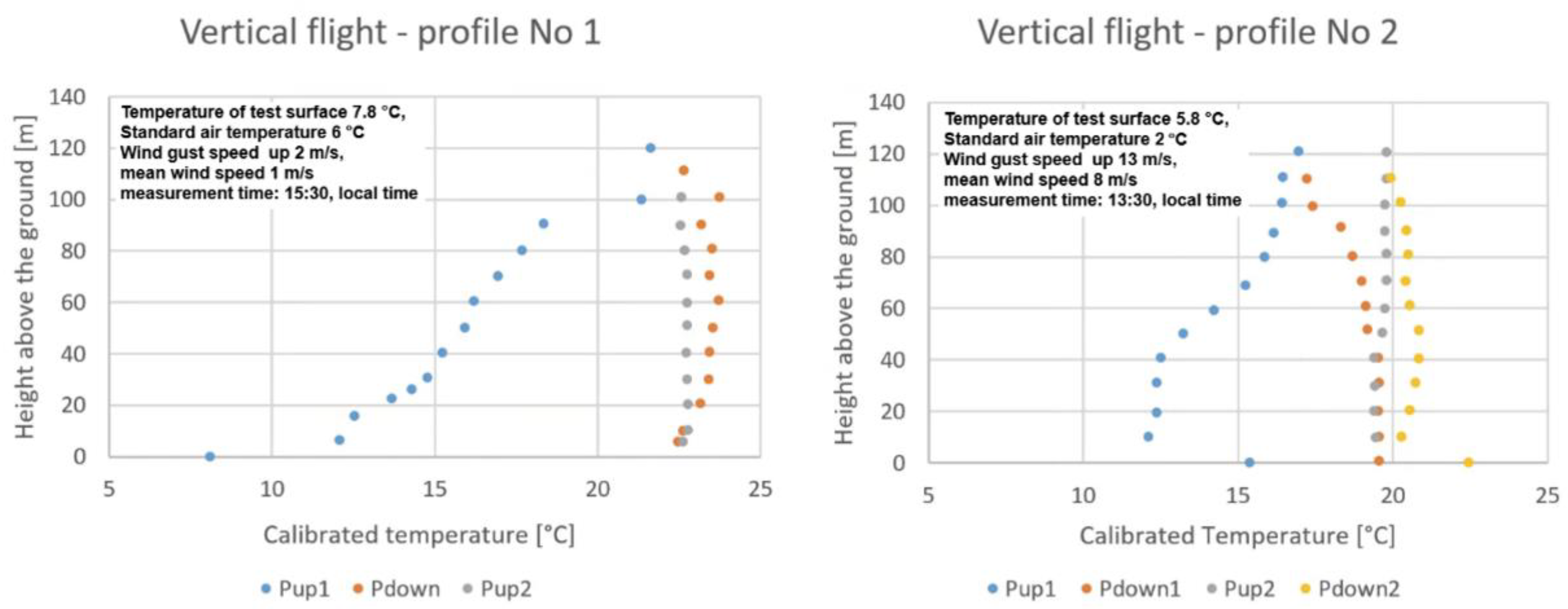
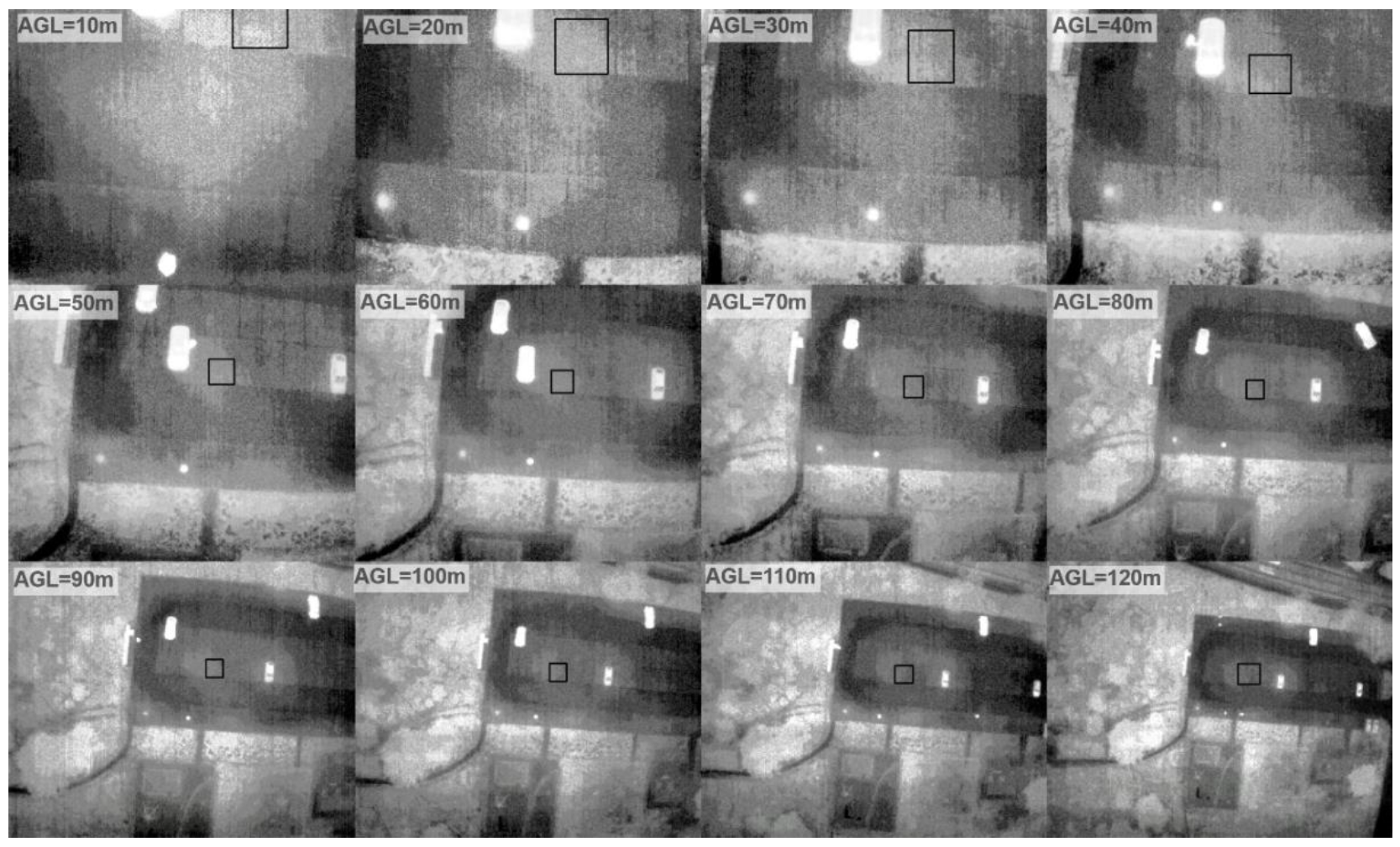
2.4. Taking Photos in Vertical Profiles
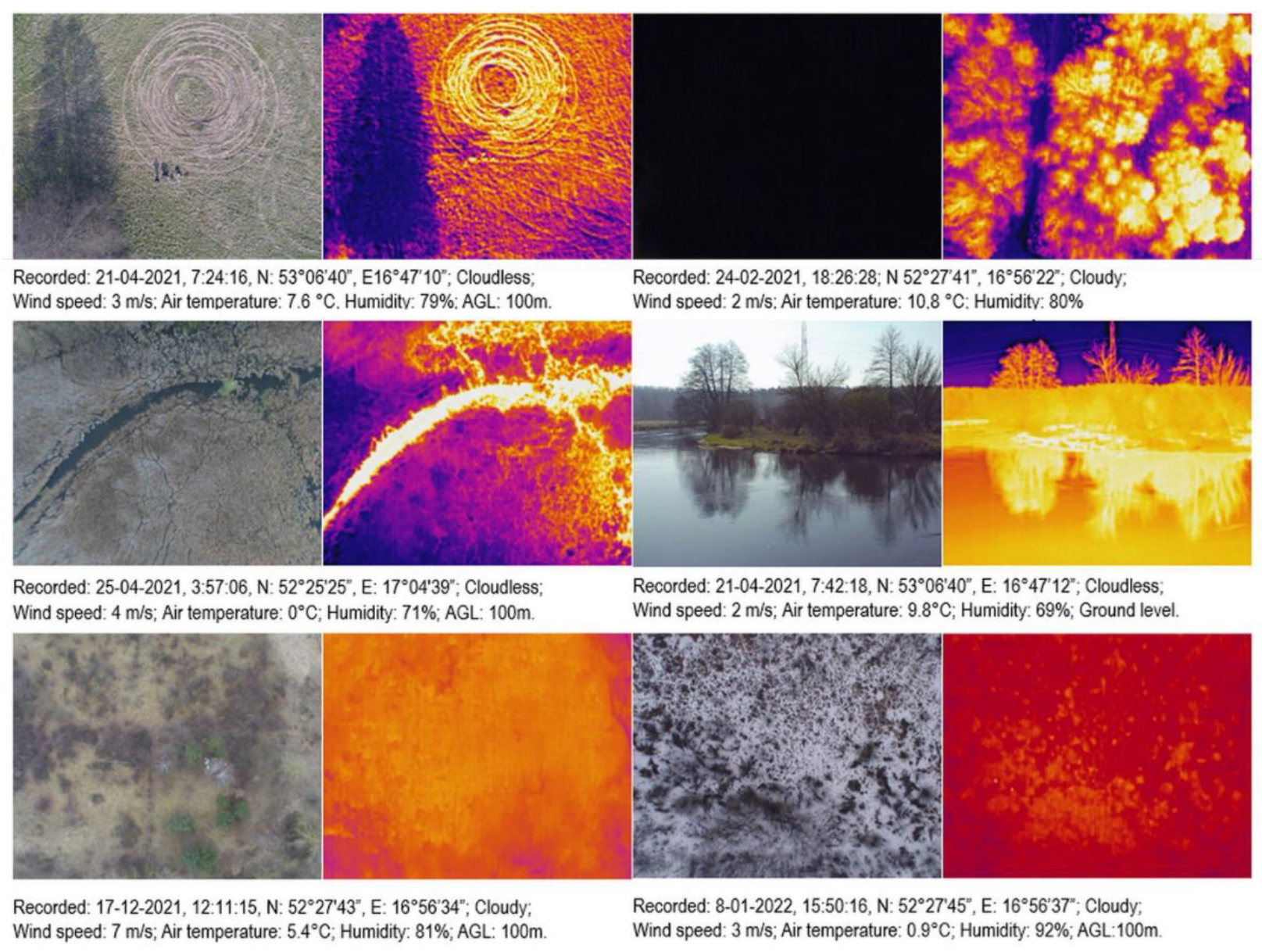
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Prakash, A. Thermal remote sensing: Concepts, issues and applications. Int. Arch. Photogramm. Rem. Sens. 2020, 33, 239–243. [Google Scholar]
- Dlesk, A.; Vach, K.; Holubec, P. Usage of photogrammetric processing of thermal images for civil engineers. The International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2018, 42, 99–103. [Google Scholar]
- Alchanatis, V.; Cohen, Y.; Cohen, S.; Moller, M.; Sprinstin, M.; Meron, M. Evaluation of different approaches for estimating and mapping crop water status in cotton with thermal imaging. Precis. Agric. 2010, 11, 27–41. [Google Scholar] [CrossRef]
- Guilioni, L.; Jones, H.G.; Leinonen, I.; Lhomme, J.P. On the relationships between stomatal resistance and leaf temperatures in thermography. Agric. For. Meteorol. 2008, 148, 1908–1912. [Google Scholar] [CrossRef]
- Leinonen, I.; Grant, O.M.; Tagliavia, C.P.P.; Chaves, M.M.; Jones, H.G. Estimating stomatal conductance with thermal imagery. Plant Cell Environ. 2006, 29, 1508–1518. [Google Scholar] [CrossRef]
- Sanna, A.; Lamberti, F. Editorial Advances in Target Detection and Tracking in Forward-Looking InfraRed (FLIR) Imagery. Sensors 2014, 14, 20297–20303. [Google Scholar] [CrossRef] [Green Version]
- Boonea Zhua, C.; Smith, C.; Todd, I.; Willmott, J.R. Thermal near infrared monitoring system for electron beam melting with emissivity tracking. Addit. Manuf. 2018, 22, 601–605. [Google Scholar]
- Maes, W.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook Gaetano. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Harvey, M.; Pearson, S.; Alexander, K.B.; Rowland, J.; White, P. Unmanned aerial vehicles (UAV) for cost effective aerial orthophotos and digital surface models (DSMs). In Proceedings of the New Zealand Geothermal Workshop 2014 Proceedings, Auckland, New Zealand, 24–26 November 2014. [Google Scholar]
- Harvey, M.; Rowland, J.V.; Luketina, K.M. Drone with thermal infrared camera provides high resolution georeferenced imagery of the Waikite geothermal area, New Zealand. J. Volcanol. Geoth. Res. 2016, 325, 61–69. [Google Scholar] [CrossRef]
- Blaya-Ros, P.J.; Blanco, V.; Domingo, R.; Soto-Valles, F.; Torres-Sánchez, R. Feasibility of low-cost thermal imaging for monitoring water stress in young and mature sweet cherry trees. Appl. Sci. 2020, 10, 5461. [Google Scholar] [CrossRef]
- Valente, J.; Roldán, J.; Garzón, M.; Barrientos, A. Towards Airborne Thermography via Low-Cost Thermopile Infrared Sensors. Drones 2019, 3, 30. [Google Scholar] [CrossRef] [Green Version]
- Osroosh, Y.; Khot, L.R.; Peters, R.T. Economical thermal-RGB imaging system for monitoring agricultural crops. Comput. Electron. Agric. 2018, 147, 34–43. [Google Scholar] [CrossRef]
- Martinez-Jimenez, M.; Loza-Gonzalez, V.; Kolosovas-Machuca, S.; Yanes-Lane, M.; Ramirez-GarciaLuna, A.; Ramirez-GarciaLuna, J. Diagnostic accuracy of infrared thermal imaging for detecting COVID-19 infection in minimally symptomatic patients. Eur. J. Clin. Investig. 2021, 51, e13474. [Google Scholar] [CrossRef] [PubMed]
- Brooke, C. Thermal Imaging for the Archeological Investigation of Historic Buildings. Remote Sens. 2018, 10, 1401. [Google Scholar] [CrossRef] [Green Version]
- Agudo, P.U.; Pajas, J.A.; Pérez-Cabello, F.; Redón, J.V.; Lebrón, B.E. The potential of drones and sensors to enhance detection of archaeological cropmarks: A comparative study between multi-spectral and thermal imagery. Drones 2018, 2, 29. [Google Scholar] [CrossRef] [Green Version]
- Šedina, J.; Housarová, E.; Raeva, P. Using RPAS for the detection of archaeological objects using multispectral and thermal imaging. Eur. J. Remote Sens. 2019, 52 (Suppl. 1), 182–191. [Google Scholar] [CrossRef] [Green Version]
- Monterroso-Checa, A.; Redondo-Villa, A.; Gasparini, M.; Hornero, A.; Iraci, B.; Martín-Talaverano, R.; Moreno-Escribano, J.C.; Muñoz-Cádiz, J.; Murillo-Fragero, J.I.; Obregón-Romero, R.; et al. A heritage science workflow to preserve and narrate a rural archeological landscape using virtual reality: The cerro del castillo of belmez and its surrounding environment (Cordoba, Spain). Appl. Sci. 2020, 10, 8659. [Google Scholar] [CrossRef]
- Nandhithaa, N.M.; Roslinb, S.E.; Chakravarthib, R.; Sangeethab, M.S. Feasibility of Infrared Thermography for Health Monitoring of Archeological Structures. Smart Intell. Comput. Commun. Technol. 2021, 38, 111. [Google Scholar]
- Feltynowski, M.; Zawistowski, M. Opportunities Related to the Use of Unmanned Systems in Emergency Services; Scientific and Research Centre for Fire Protection–National Research Institute, Safety & Fire Technique: Poland, Józefów, 2018; Volume 51, pp. 126–133. [Google Scholar]
- Ambrosia, V.; Wegener, S.; Sullivan, D.; Buechel, S.; Dunagan, S.; Brass, J.; Stoneburner, J.; Schoenung, S. Demonstrating UAV-Acquired Real-Time Thermal Data over Fires. Photogramm. Eng. Remote Sens. 2003, 69, 391–402. [Google Scholar] [CrossRef]
- Andraši, P.; Radišić, T.; Muštra, M.; Ivošević, J. Night-time detection of uavs using thermal infrared camera. Transp. Res. Procedia 2017, 28, 183–190. [Google Scholar] [CrossRef]
- Nithyavathy, N.; Kumar, S.A.; Rahul, D.; Kumar, B.S.; Shanthini, E.R.; Naveen, C. Detection of fire prone environment using Thermal Sensing Drone. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1055, 012006. Available online: https://iopscience.iop.org/article/10.1088/1757-899X/1055/1/012006/pdf (accessed on 22 January 2022). [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne optical and thermal remote sensing for wildfire detection and monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riggan, P.J.; Hoffman, J.W. FireMapper™: A thermal-imaging radiometer for wildfire research and operations. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 8–15 March 2003. [Google Scholar]
- Dugdale, S.J.; Kelleher, C.A.; Malcolm, I.A.; Caldwell, S.; Hannah, D.M. Assessing the potential of drone-based thermal infrared imagery for quantifying river temperature heterogeneity. Hydrol. Processes 2019, 33, 1152–1163. [Google Scholar] [CrossRef]
- McDonald, W. Drones in urban stormwater management: A review and future perspectives. Urban Water J. 2019, 16, 505–518. [Google Scholar] [CrossRef]
- Vélez-Nicolás, M.; García-López, S.; Barbero, L.; Ruiz-Ortiz, V.; Sánchez-Bellón, A. Applications of Unmanned Aerial Systems (UASs) in Hydrology: A Review. Remote Sens. 2021, 13, 1359. [Google Scholar] [CrossRef]
- Chung, M.; Detweiler, C.; Hamilton, M.; Higgins, J.; Ore, J.P.; Thompson, S. Obtaining the thermal structure of lakes from the air. Water 2015, 7, 6467–6482. [Google Scholar] [CrossRef] [Green Version]
- Webster, C.; Westoby, M.; Rutter, N.; Jonas, T. Three-dimensional thermal characterization of forest canopies using UAV photogrammetry. Remote Sens. Environ. 2018, 209, 835–847. [Google Scholar] [CrossRef] [Green Version]
- Baratchi, M.; Meratnia, N.; Havinga, P.J.; Skidmore, A.; Toxopeus, B.A. Sensing solutions for collecting spatio-temporal data for wildlife monitoring applications. Sensors 2013, 13, 6054–6088. [Google Scholar] [CrossRef] [Green Version]
- Sykes, D.J.; Couvillion, J.S.; Cromiak, A.; Bowers, S.; Schenck, E.; Crenshaw, M.; Ryan, P.L. The use of digital infrared thermal imaging to detect estrus in gilts. Theriogenology 2012, 20278, 147–152. [Google Scholar] [CrossRef]
- Shariq, M.H.; Hughes, B.R. Revolutionising building inspection techniques to meet large-scale energy demands: A review of the state-of-the-art. Renew. Sustain. Energy Rev. 2020, 130, 109979. [Google Scholar] [CrossRef]
- Haichao, Z.; Xue, Z.; Junru, Y.; Lihua, Z.; Xintian, W. A Thermal Performance Detection Method for Building Envelope Based on 3D Model Generated by UAV Thermal Imagery. Energies 2020, 13, 6677. [Google Scholar]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Yalong, M.; Xinkai, W.; Guizhen, Y.; Yongzheng, X.; Yunpeng, W. Pedestrian Detection and Tracking from Low-Resolution Unmanned Aerial Vehicle Thermal Imagery. Sensors 2016, 16, 00446. [Google Scholar]
- Ishimwe, R.; Abutaleb, K.; Ahmed, F. Applications of Thermal Imaging in Agriculture—A Review. Adv. Remote Sens. 2014, 3, 128–140. [Google Scholar] [CrossRef] [Green Version]
- Vadivambal, R.; Jayas, D.S. Applications of thermal imaging in agriculture and food industry—A review. Food Bioprocess Technol. 2011, 4, 186–199. [Google Scholar] [CrossRef]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Krishna, G.; Sahoo, R.N.; Singh, P.; Patra, H.; Bajpai, V.; Das, B.; Kumar, S.; Dhandapani, R.; Vishwakarma, C.; Pal, M.; et al. Application of thermal imaging and hyperspectral remote sensing for crop water deficit stress monitoring. Geocarto Int. 2021, 36, 481–498. [Google Scholar] [CrossRef]
- Han, Y.; Tarakey, B.A.; Hong, S.J.; Kim, S.Y.; Kim, E.; Lee, C.H.; Kim, G. Calibration and Image Processing of Aerial Thermal Image for UAV Application in Crop Water Stress Estimation. J. Sens. 2021, 2021, 5537795. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, H.; Ciechanowska, I.; Spaner, D. Application of infrared thermal imaging for the rapid diagnosis of crop disease. IFAC-Pap. 2018, 51, 424–430. [Google Scholar] [CrossRef]
- Banerjee, K.; Krishnan, P.; Mridha, N. Application of thermal imaging of wheat crop canopy to estimate leaf area index under different moisture stress conditions. Biosyst. Eng. 2018, 166, 13–27. [Google Scholar] [CrossRef]
- Quebrajo, L.; Perez-Ruiz, M.; Pérez-Urrestarazu, L.; Martínez, G.; Egea, G. Linking thermal imaging and soil remote sensing to enhance irrigation management of sugar beet. Biosyst. Eng. 2018, 165, 77–87. [Google Scholar] [CrossRef]
- Roopaei, M.; Rad, P.; Choo KK, R. Cloud of things in smart agriculture: Intelligent irrigation monitoring by thermal imaging. IEEE Cloud Comput. 2017, 4, 10–15. [Google Scholar] [CrossRef]
- Egea, G.; Padilla-Díaz, C.M.; Martinez-Guanter, J.; Fernández, J.E.; Pérez-Ruiz, M. Assessing a crop water stress index derived from aerial thermal imaging and infrared thermometry in super-high density olive orchards. Agric. Water Manag. 2017, 187, 210–221. [Google Scholar] [CrossRef] [Green Version]
- Tucci, G.; Parisi, E.; Castelli, G.; Errico, A.; Corongiu, M.; Sona, G.; Viviani, E.; Bresci, E.; Preti, F. Multi-Sensor UAV Application for Thermal Analysis on a Dry-Stone Terraced Vineyard in Rural Tuscany Landscape. SPRS Int. J. Geo-Inf. 2019, 8, 87. [Google Scholar]
- Ortiz-Sanz, J.; Gil-Docampo, M.; Arza-García, M.; Cañas-Guerrero, I. IR thermography from UAVs to monitor thermal anomalies in the envelopes of traditional wine cellars: Field test. Remote Sens. 2019, 11, 1424. [Google Scholar] [CrossRef]
- Costa, J.M.; Grant, O.M.; Chaves, M.M. Use of thermal imaging in viticulture: Current application and future prospects. In Methodologies and Results in Grapevine Research; Springer: Dordrecht, The Netherlands, 2010; pp. 135–150. [Google Scholar]
- Zhou, Z.; Majeed, Y.; Naranjo, G.D.; Gambacorta, E. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019. [Google Scholar] [CrossRef]
- Ivushkin, K.; Bartholomeus, H.; Bregt, A.K.; Pulatov, A.; Franceschini, M.H.; Kramer, H.; van Loo, E.N.; Roman, V.J.; Finkers, R. UAV based soil salinity assessment of cropland. Geoderma 2019, 338, 502–512. [Google Scholar] [CrossRef]
- Estrada-Pérez, L.V.; Pradana-López, S.; Pérez-Calabuig, A.M.; Mena, M.L.; Cancilla JC Torrecilla, J.S. Thermal imaging of rice grains and flours to design convolutional systems to ensure quality and safety. Food Control 2021, 121, 107572. [Google Scholar] [CrossRef]
- Nguyen TX, B.; Rosser, K.; Chahl, J. A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation. J. Imaging 2021, 7, 217. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.; Suárez, L.; González-Dugo, V.; Fereres, E. Remote sensing of vegetation from UAV platforms using lightweight multispectral and thermal imaging sensors. Int. Arch. Photogramm. Remote Sens. Spatial Inform. Sci. 2009, 38, 6. [Google Scholar]
- Młynarczyk, A.; Królewicz, S. Radiometric calibration of the E10T thermal camera. In The Natural Environment as an Area of Research; Młynarczyk, A., Ed.; Bogucki Wydawnictwo Naukowe: Poznań, Poland, 2021; pp. 49–58. ISBN 978-83-7986-357-0. [Google Scholar]
- López, A.; Jurado, J.M.; Ogayar, C.J.; Feito, F.R. An optimized approach for generating dense thermal point clouds from UAV-imagery. ISPRS J. Photogramm. Remote Sens. 2021, 182, 78–95. [Google Scholar] [CrossRef]
- User Manual Baurer FT65. Available online: https://www.beurer.com/web/pl/products/medical/fever-thermometers/ft-65.php (accessed on 17 January 2022).
- Quick Start Guide Yuneec E10T. Available online: https://temporalwebdownload.s3.eu-central-1.amazonaws.com/CAMERAS/E10T/E10T%2BQuick%2BStart%2BGuide%2B(EN%2C%2BDE%2C%2BFR%2C%2BIT%2C%2BES%2C%2BFIN%2C%2BCN).zip (accessed on 18 January 2022).
- Agisoft. Thermal Imagery Processing. Modified on: Wed, 24 March 2021. 2021. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000158942-thermal-imagery-processing (accessed on 28 May 2022).
- Kelly, J.; Kljun, N.; Olsson, P.O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Eklundh, L. Challenges and best practices for deriving temperature data from an uncalibrated UAV thermal infrared camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef] [Green Version]
- Leblanc, G.; Kalacska, M.; Arroyo-Mora, J.P.; Lucanus, O.; Todd, A. A Practical Validation of Uncooled Thermal Imagers for Small RPAS. Drones 2021, 5, 132. [Google Scholar] [CrossRef]
- Olsson, P.O.; Vivekar, A.; Adler, K.; Garcia Millan, V.E.; Koc, A.; Alamrani, M.; Eklundh, L. Radiometric correction of multispectral uas images: Evaluating the accuracy of the parrot sequoia camera and sunshine sensor. Remote Sens. 2021, 13, 577. [Google Scholar] [CrossRef]
- Tan, D. Image enhancement based on adaptive median filter and Wallis filter. In Proceedings of the National Conference on Electrical, Electronics and Computer Engineering, Xi’an, China, 12–13 December 2015; pp. 12–13. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter\Sensor | RGB | Thermal |
|---|---|---|
| Resolution (pixels) | 1920 × 1080 | 320 × 256 |
| Field of View (FOV) | 89.6° | 34° |
| Focal length (mm) | 3.5 | 4.3 |
| The physical dimension of a pixel (mm) | 2.3 | 12 (6 enhanced JPG) |
| Wavelength | 0.45–0.77 μm | 8–14 μm |
| Sensitivity | ISO range: 100–3200 Shutter speed: 1/30–1/8000 s | <50 mK, @f/1.0 |
| Sensor type | CMOS 1/2,8” | Uncooled Vox microbolometer (FLIR) |
| Scene temperature range | High gain −25 to 100 °C Low gain −40 to 550 °C | |
| Calibration options | n/a | Atmospheric parameters:
|
| Color space and recording data format | RGB 24 bit, JPG | TIFF 16-bit (not radiometric), Pallete color JPEG (enhanced resolution 640 × 512) |
| Operating temperature range | −10 to 40 °C | −10 to 40 °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Młynarczyk, A.; Królewicz, S.; Konatowska, M.; Jankowiak, G. Experience Gained When Using the Yuneec E10T Thermal Camera in Environmental Research. Remote Sens. 2022, 14, 2633. https://doi.org/10.3390/rs14112633
Młynarczyk A, Królewicz S, Konatowska M, Jankowiak G. Experience Gained When Using the Yuneec E10T Thermal Camera in Environmental Research. Remote Sensing. 2022; 14(11):2633. https://doi.org/10.3390/rs14112633
Chicago/Turabian StyleMłynarczyk, Adam, Sławomir Królewicz, Monika Konatowska, and Grzegorz Jankowiak. 2022. "Experience Gained When Using the Yuneec E10T Thermal Camera in Environmental Research" Remote Sensing 14, no. 11: 2633. https://doi.org/10.3390/rs14112633
APA StyleMłynarczyk, A., Królewicz, S., Konatowska, M., & Jankowiak, G. (2022). Experience Gained When Using the Yuneec E10T Thermal Camera in Environmental Research. Remote Sensing, 14(11), 2633. https://doi.org/10.3390/rs14112633