
Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation



Abstract
:1. Introduction
2. Materials and Methods
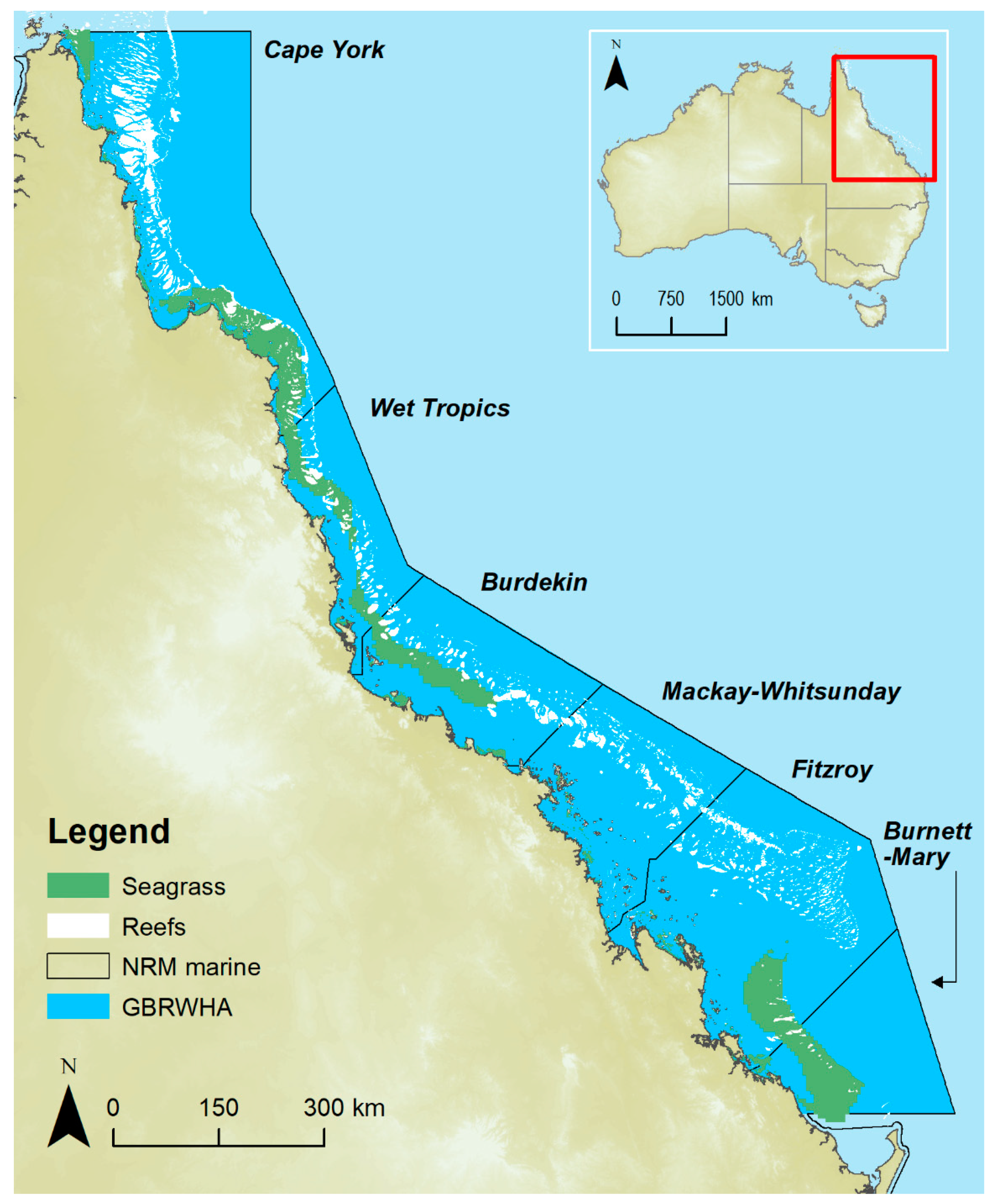
2.1. Study Area
2.2. Desktop Assessment of Seagrass Mapping in the GBRWHA to Date
2.3. Applied Assessment of Traditional and Enhanced Mapping Approaches
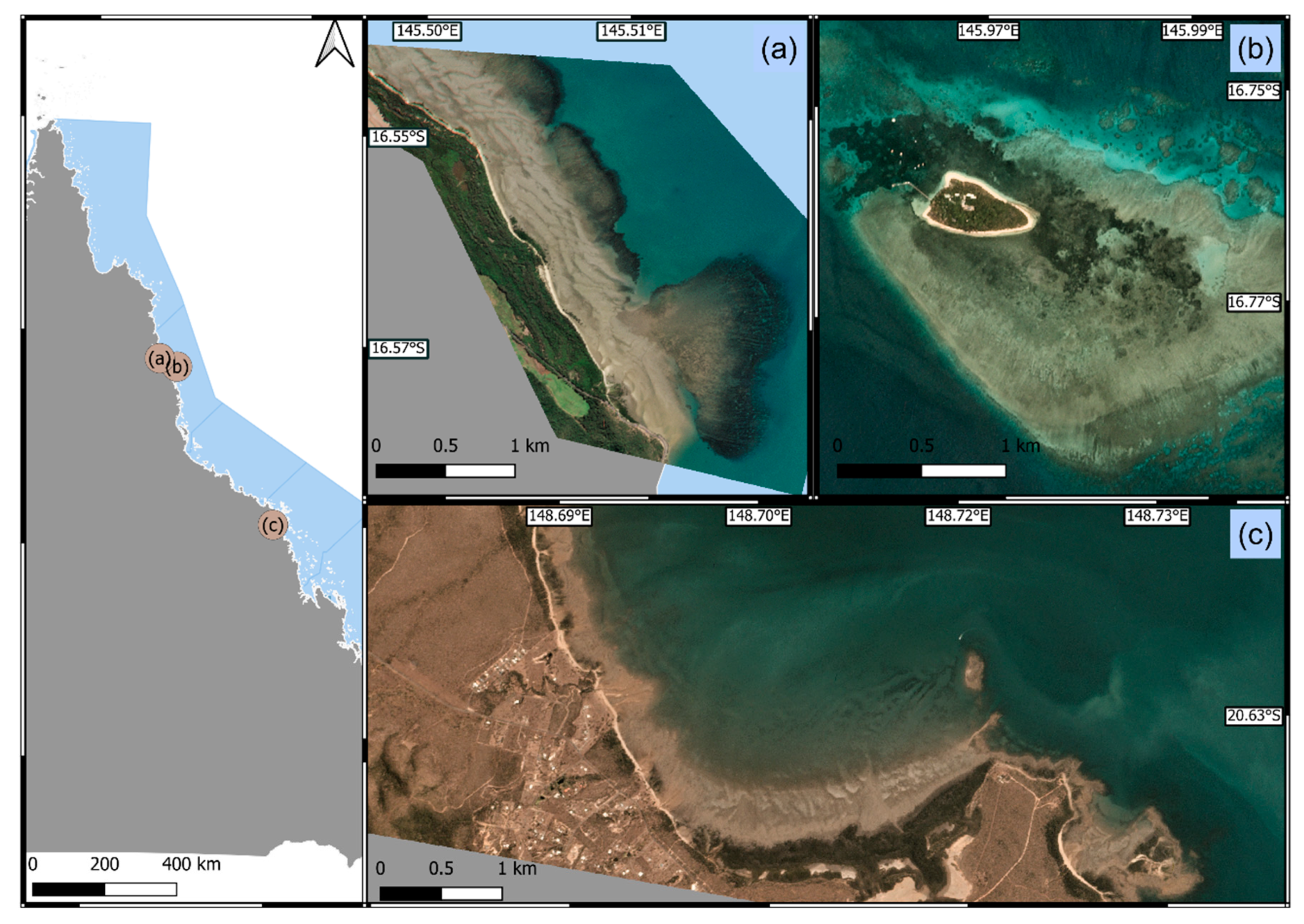
2.3.1. Characteristics of Case Study Areas
2.3.2. Data Collection and Mapping for Case Studies
Approach 1: Field-Based Direct In Situ Boundary Track (by Foot)
Approach 2: Field-Based Direct In Situ Spot-Check and High Earth Boundary Track (by Helicopter)
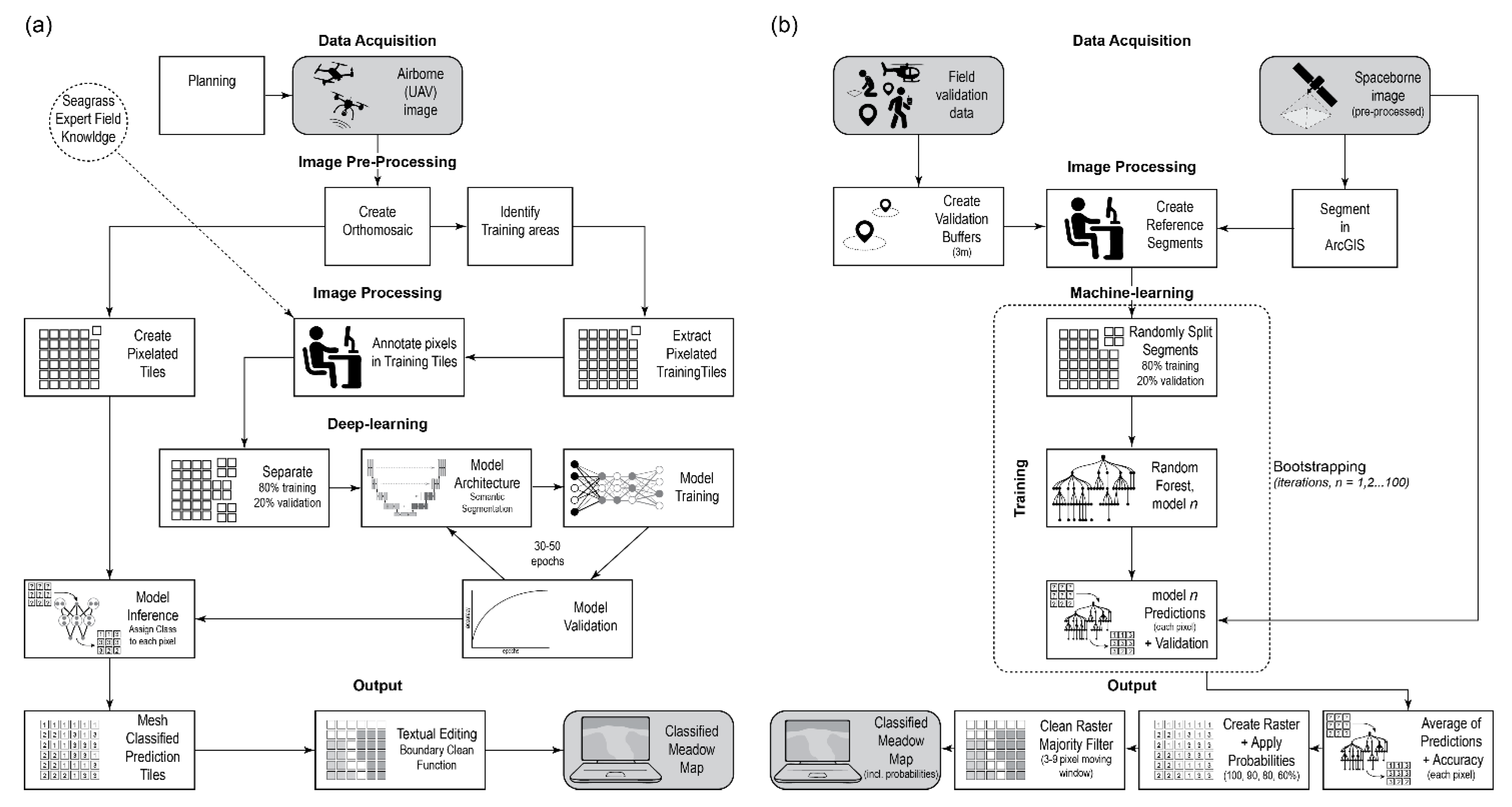
Approach 3: High Earth Mapping with Unoccupied Aerial Systems (UAS) Captured Imagery
Approach 4: Earth Observing from Space with Satellite Captured Imagery
2.3.3. Comparison of Mapping Approach Outputs
3. Results
3.1. Desktop Assessment of Seagrass Mapping in the GBRWHA to Date
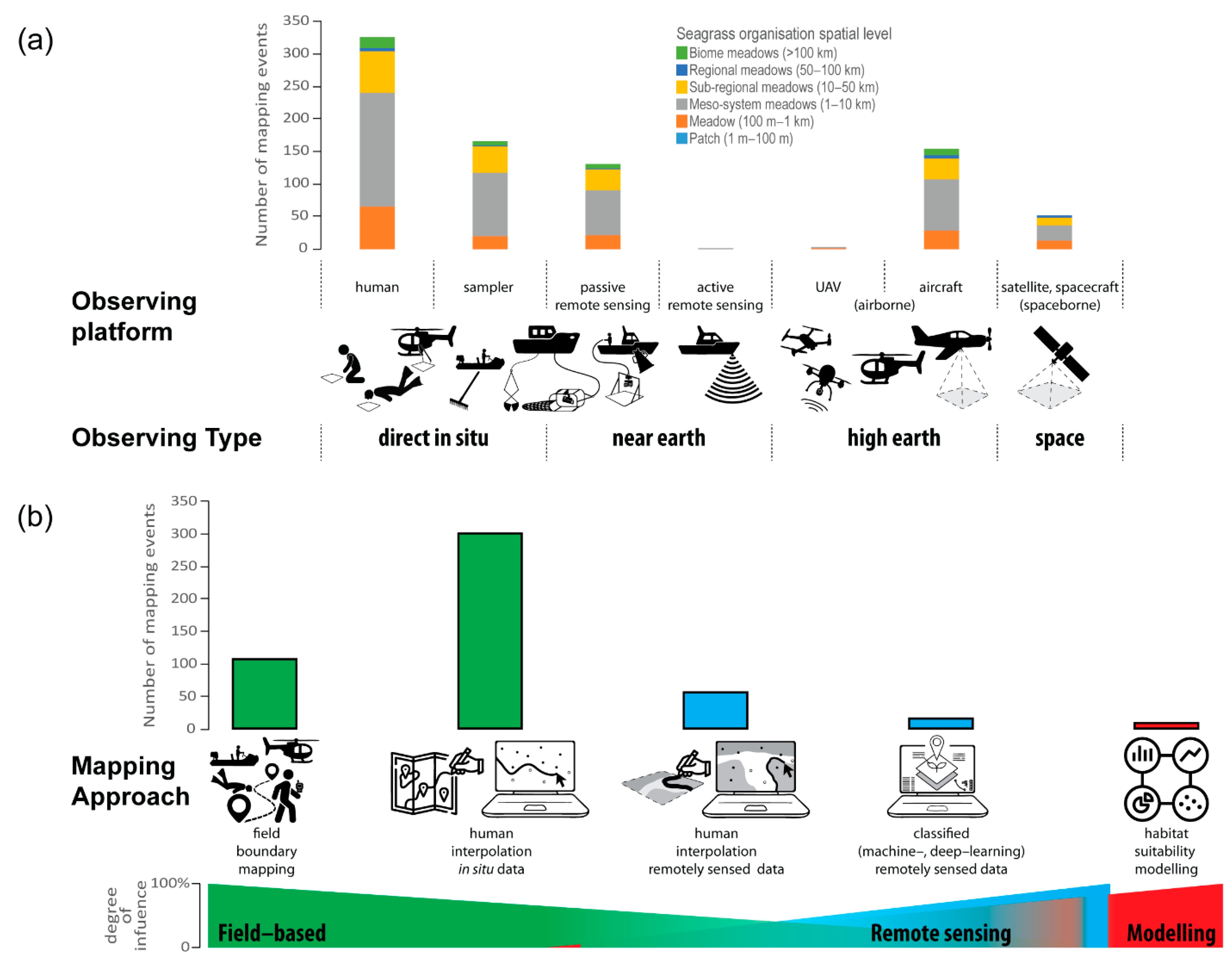
3.1.1. Earth Observing Platforms and Mapping Approaches
3.1.2. Mapping Characteristics
3.1.3. Mapping Confidence
3.2. Applied Comparison of Traditional and Enhanced Mapping Approaches
3.2.1. Fine-Scale Mapping—Patch to Meadow (AOI = 5.5 ha)
3.2.2. Meso-Scale Mapping—Meso-System Meadows (AOI = 130 to 317 ha)
3.3. Applied Assessment of Enhanced Mapping Approaches
4. Discussion
4.1. Tradional Mapping Approaches
4.2. Improving Machine- and Deep-Learning Approaches for Seagrass Mapping
4.3. Improving Accuracy and Confidence of Maps for Users
4.4. Improving Field Data Capture
4.5. Improving Mapping for Policy and Management Decisions
4.6. Improving Mapping Using Habitat Suitability Modelling
4.7. Improving Mapping for Deeper Subtidal Habitats
4.8. Improving Mapping through Increased Collaboration
4.9. Recommendations for Future Seagrass Mapping Events in the GBRWHA
- Ensure routine collection of geolocated/geotagged photoquadrats to support new and repeated field data collection for training and validation, and provide ability to revisit images for alternate analysis over time;
- Prioritise airborne or spaceborne imagery for seagrass mapping of those environments where seagrass features can be differentiated, such as intertidal and shallow subtidal habitats;
- Transition to UAVs and all-electric observing platforms to improve capture of high-resolution imagery while also reducing greenhouse emissions;
- Maximise use of low altitude and high-resolution image capture (e.g., UAVs) to provide in situ field validation (e.g., spot-checks) where possible;
- Operationalise the routine inclusion of meadowscape metrics in all seagrass maps,
- Ensure all maps of seagrass meadow spatial extent include a measure of confidence, determined using a clear process where all key measures of accuracy, precision, and resolution are transparent to the map user;
- Ensure habitat suitability models for seagrasses are based on comprehensive data and include multiple lines of evidence, such as expert knowledge and coupling with remotely sensed imagery;
- Encourage participatory seagrass mapping, including in situ field validation data, with First Nations peoples and citizen scientists to provide big data solutions.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Joyce, R.B. Time and Captain Cook. Queensland Heritage 1970, 2, 8–12. [Google Scholar]
- Cook, J.; Hutchinson, J.; Wallis, S.; Bolckow, H.W.F. Journal of HMS Endeavour, Lieutenant James Cook, Commander, from May 1768 to July 1771. 1768. Available online: http://nla.gov.au/nla.obj-228958440 (accessed on 26 April 2021).
- Kuo, J.; Cambridge, M.L.; McKenzie, L.J.; Coles, R.G. Taxonomy of Australian Seagrasses. In Seagrasses of Australia: Structure, Ecology and Conservation; Larkum, A.W.D., Kendrick, G.A., Ralph, P.J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 759–782. [Google Scholar] [CrossRef]
- Brown, R. Monocotyledones. In Prodromus Florae Novae Hollandiae et Insulae Van-Diemen: Exhibens Characteres Plantarum Quas Annis 1802–1805 per Oras Utriusque Insulae Collegit et Descripsit Robertus Brown; Insertis Passim Aliis Speciebus Auctori Hucusque Cognitis, seu Evulgatis, seu Ineditis, Praaesertim Banksianis, in Primo Itinere Navarchi Cook Detectis; J. Johnson et Socios: Londini, UK, 1810; Volume 1, pp. 145–590. [Google Scholar]
- Coles, R.G.; Rasheed, M.A.; McKenzie, L.J.; Grech, A.; York, P.H.; Sheaves, M.; McKenna, S.; Bryant, C. The Great Barrier Reef World Heritage Area seagrasses: Managing this iconic Australian ecosystem resource for the future. Estuar. Coast. Shelf Sci. 2015, 153, A1–A12. [Google Scholar] [CrossRef]
- Marsh, H.; Saalfeld, W.K. The distribution and abundance of dugongs in the Northern Great Barrier Reef Marine Park. Aust. Wildl. Res. 1989, 16, 429–440. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Yoshida, R.L.; Grech, A.; Coles, R. Composite of coastal seagrass meadows in Queensland, AustraliaNovember 1984 to June 2010. Pangaea 2014. [Google Scholar] [CrossRef]
- Carter, A.B.; McKenna, S.A.; Rasheed, M.A.; Collier, C.; McKenzie, L.; Pitcher, R.; Coles, R. Synthesizing 35 years of seagrass spatial data from the Great Barrier Reef World Heritage Area, Queensland, Australia. Limnol. Oceanogr. Lett. 2021, 6, 216–226. [Google Scholar] [CrossRef]
- GBRMPA. Great Barrier Reef Features; Great Barrier Reef Marine Park Authority: Townsville, Australia, 2014. Available online: http://www.gbrmpa.gov.au/geoportal/ (accessed on 26 June 2021).
- McKenzie, L.J.; Nordlund, L.M.; Jones, B.L.; Cullen-Unsworth, L.C.; Roelfsema, C.; Unsworth, R.K. The global distribution of seagrass meadows. Environ. Res. Lett. 2020, 15, 074041. [Google Scholar] [CrossRef]
- Gacia, E.; Duarte, C.M.; Marba, N.; Terrados, J.; Kennedy, H.; Fortes, M.D.; Tri, N.H. Sediment deposition and production in SE-Asia seagrass meadows. Estuar. Coast. Shelf Sci. 2003, 56, 909–919. [Google Scholar] [CrossRef]
- Lamb, J.B.; van de Water, J.A.J.M.; Bourne, D.G.; Altier, C.; Hein, M.Y.; Fiorenza, E.A.; Abu, N.; Jompa, J.; Harvell, C.D. Seagrass ecosystems reduce exposure to bacterial pathogens of humans, fishes, and invertebrates. Science 2017, 355, 731–733. [Google Scholar] [CrossRef]
- Madsen, J.D.; Chambers, P.A.; James, W.F.; Koch, E.W.; Westlake, D.F. The interaction between water movement, sediment dynamics and submersed macrophytes. Hydrobiologia 2001, 444, 71–84. [Google Scholar] [CrossRef]
- Marsh, H.; O’Shea, T.J.; Reynolds, J.E., III. Ecology and Conservation of the Sirenia; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Esteban, N.; Mortimer, J.A.; Stokes, H.J.; Laloë, J.-O.; Unsworth, R.K.F.; Hays, G.C. A global review of green turtle diet: Sea surface temperature as a potential driver of omnivory levels. Mar. Biol. 2020, 167, 183. [Google Scholar] [CrossRef]
- Duarte, C.M.; Krause-Jensen, D. Export from Seagrass Meadows Contributes to Marine Carbon Sequestration. Front. Mar. Sci. 2017, 4, 13. [Google Scholar] [CrossRef] [Green Version]
- Fourqurean, J.W.; Duarte, C.M.; Kennedy, H.; Marba, N.; Holmer, M.; Mateo, M.A.; Apostolaki, E.T.; Kendrick, G.A.; Krause-Jensen, D.; McGlathery, K.J.; et al. Seagrass ecosystems as a globally significant carbon stock. Nat. Geosci. 2012, 5, 505–509. [Google Scholar] [CrossRef]
- Unsworth, R.K.F.; Collier, C.J.; Henderson, G.M.; McKenzie, L.J. Tropical seagrass meadows modify seawater carbon chemistry: Implications for coral reefs impacted by ocean acidification. Environ. Res. Lett. 2012, 7, 024026. [Google Scholar] [CrossRef]
- Cullen-Unsworth, L.; Unsworth, R. Seagrass Meadows, Ecosystem Services, and Sustainability. Environ. Sci. Policy Sustain. Dev. 2013, 55, 14–28. [Google Scholar] [CrossRef]
- Unsworth, R.K.F.; McKenzie, L.J.; Collier, C.J.; Cullen-Unsworth, L.C.; Duarte, C.M.; Eklöf, J.S.; Jarvis, J.C.; Jones, B.L.; Nordlund, L.M. Global challenges for seagrass conservation. Ambio 2019, 48, 801–815. [Google Scholar] [CrossRef] [Green Version]
- McKenzie, L.J.; Collier, C.J.; Langlois, L.A.; Yoshida, R.L.; Uusitalo, J.; Waycott, M. Marine Monitoring Program: Annual Report for Inshore Seagrass Monitoring 2019–2020. Report for the Great Barrier Reef Marine Park Authority; Great Barrier Reef Marine Park Authority: Townsville, Australia, 2021; p. 168. [Google Scholar]
- O’Brien, K.R.; Waycott, M.; Maxwell, P.; Kendrick, G.A.; Udy, J.W.; Ferguson, A.J.P.; Kilminster, K.; Scanes, P.; McKenzie, L.J.; McMahon, K.; et al. Seagrass ecosystem trajectory depends on the relative timescales of resistance, recovery and disturbance. Mar. Pollut. Bull. 2018, 134, 166–176. [Google Scholar] [CrossRef] [Green Version]
- Kilminster, K.; McMahon, K.; Waycott, M.; Kendrick, G.A.; Scanes, P.; McKenzie, L.; O’Brien, K.R.; Lyons, M.; Ferguson, A.; Maxwell, P.; et al. Unravelling complexity in seagrass systems for management: Australia as a microcosm. Sci. Total Environ. 2015, 534, 97–109. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Lyons, M.B.; Castro-Sanguino, C.; Kovacs, E.M.; Callaghan, D.; Wettle, M.; Markey, K.; Borrego-Acevedo, R.; Tudman, P.; Roe, M.; et al. How Much Shallow Coral Habitat Is There on the Great Barrier Reef? Remote Sens. 2021, 13, 4343. [Google Scholar] [CrossRef]
- Udy, J.; Waycott, M.; Collier, C.; Kilminster, K.; McMahon, K.; Rasheed, M.; MCKENZIE, L.J.; Carter, A.; Lawrence, E.; Maxwell, P.; et al. Monitoring seagrass within the Reef 2050 Integrated Monitoring and Reporting Program; Great Barrier Reef Marine Park Authority: Townsville, Australia, 2018; p. 94. [Google Scholar]
- Carter, A.B.; McKenna, S.A.; Rasheed, M.A.; McKenzie, L.J.; Coles, R.G. Seagrass Mapping Synthesis: A Resource for Coastal Management in the Great Barrier Reef World Heritage Area. Report to the National Environmental Science Programme; Reef and Rainforest Research Centre Limited: Cairns, Australia, 2016; p. 22. [Google Scholar]
- Carter, A.B.; McKenna, S.A.; Rasheed, M.A.; McKenzie, L.J.; Coles, R.G. Collation of Spatial Seagrass Data (Meadow Extent Polygons, Species Presence/Absence Points) from 1984–2014 for the Great Barrier Reef World Heritage Area (GBRWHA) (NESP TWQ 3.1, TropWATER, JCU); eAtlas DatasetAIMS: Townsville, Australia, 2016. [Google Scholar]
- Derbyshire, K.J.; Willoughby, S.R.; McColl, A.L.; Hocroft, D.M. Small Prawn Habitat and Recruitment Study: Final Report to the Fisheries Research and Development Corporation and the Queensland Fisheries Management Authority; Department of Primary Industries: Cairns, Australia, 1995; p. 43. [Google Scholar]
- Campbell, S.J.; McKenzie, L.J.; Kerville, S.P.; Bité, J.S. Patterns in tropical seagrass photosynthesis in relation to light, depth and habitat. Estuar. Coast. Shelf Sci. 2007, 73, 551–562. [Google Scholar] [CrossRef]
- Coles, R.; McKenzie, L.J.; De’ath, G.; Roelofs, A.; Lee Long, W.J. Spatial distribution of deepwater seagrass in the inter-reef lagoon of the Great Barrier Reef World Heritage Area. Mar. Ecol. Prog. Ser. 2009, 392, 57–68. [Google Scholar] [CrossRef]
- Petus, C.; Devlin, M.; Thompson, A.; McKenzie, L.; Teixeira da Silva, E.; Collier, C.; Tracey, D.; Martin, K. Estimating the Exposure of Coral Reefs and Seagrass Meadows to Land-Sourced Contaminants in River Flood Plumes of the Great Barrier Reef: Validating a Simple Satellite Risk Framework with Environmental Data. Remote Sens. 2016, 8, 210. [Google Scholar] [CrossRef] [Green Version]
- Carruthers, T.; Dennison, W.; Longstaff, B.; Waycott, M.; Abal, E.G.; McKenzie, L.J.; Lee Long, W. Seagrass habitats of north east Australia: Models of key processes and controls. Bull. Mar. Sci. 2002, 71, 1153–1169. [Google Scholar]
- Grech, A.; Chartrand-Miller, K.; Erftemeijer, P.; Fonseca, M.; McKenzie, L.J.; Rasheed, M.; Taylor, H.; Coles, R. A comparison of threats, vulnerabilities and management approaches in global seagrass bioregions. Environ. Res. Lett. 2012, 7, 024006. [Google Scholar] [CrossRef]
- Devlin, M.; Petus, C.; da Silva, E.; Tracey, D.; Wolff, N.; Waterhouse, J.; Brodie, J. Water Quality and River Plume Monitoring in the Great Barrier Reef: An Overview of Methods Based on Ocean Colour Satellite Data. Remote Sens. 2015, 7, 12909. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. BMJ 2009, 339, b2535. [Google Scholar] [CrossRef] [Green Version]
- DAF. Queensland Commercial Fishery 30 Minute Reporting Grid Metadata Record; Department of Agriculture and Fisheries: Brisbane, QLD, Australia, 2021. Available online: https://www.data.qld.gov.au/dataset/queensland-commercial-fishery-30-minute-reporting-grid (accessed on 20 June 2021).
- Waterhouse, J.; Henry, N.; Mitchell, C.; Smith, R.; Thomson, B.; Carruthers, C.; Bennett, J.; Brodie, J.; McCosker, K.; Northey, A.; et al. Paddock to Reef Integrated Monitoring, Modelling and Reporting Program, Program design 2018–2022; Australian and Queensland, Government: Brisbane, Australia, 2018; p. 137. [Google Scholar]
- Phinn, S.; Roelfsema, C.; Kovacs, E.; Canto, R.; Lyons, M.; Saunders, M.; Maxwell, P. Mapping, Monitoring and Modelling Seagrass Using Remote Sensing Techniques. In Seagrasses of Australia; Larkum, A.W., Ralph, P.J., Kendrick, G.A., Eds.; Springer: Cham, Switzerland, 2018; pp. 445–487. [Google Scholar]
- Hossain, M.S.; Hashim, M. Potential of Earth Observation (EO) technologies for seagrass ecosystem service assessments. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 15–29. [Google Scholar] [CrossRef]
- Bailey, R.G. The factor of scale in ecosystem mapping. Environ. Manag. 1985, 9, 271–275. [Google Scholar] [CrossRef]
- Bailey, R.G. Suggested hierarchy of criteria for multi-scale ecosystem mapping. Landsc. Urban Plan. 1987, 14, 313–319. [Google Scholar] [CrossRef] [Green Version]
- Goodchild, M.F.; Parks, B.O.; Steyaert, L.T. Environmental Modeling with GIS; Oxford University Press: New York, NY, USA, 1993. [Google Scholar]
- Roelfsema, C.; Kovacs, E.; Ortiz, J.C.; Wolff, N.H.; Callaghan, D.; Wettle, M.; Ronan, M.; Hamylton, S.M.; Mumby, P.J.; Phinn, S. Coral reef habitat mapping: A combination of object-based image analysis and ecological modelling. Remote Sens. Environ. 2018, 208, 27–41. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Kovacs, E.M.; Ortiz, J.C.; Callaghan, D.P.; Hock, K.; Mongin, M.; Johansen, K.; Mumby, P.J.; Wettle, M.; Ronan, M.; et al. Habitat maps to enhance monitoring and management of the Great Barrier Reef. Coral Reefs 2020, 39, 1039–1054. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Finkbeiner, M.A.; Kirkman, H. Methods for mapping seagrass distribution. In Global Seagrass Research Methods; Short, F.T., Coles, R.G., Eds.; Elsevier Science B.V.: Amsterdam, The Netherlands, 2001; pp. 101–121. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Collier, C.; Langlois, L.; Yoshida, R.; Smith, N.; Waycott, M. Reef Rescue Marine Monitoring Program—Inshore Seagrass, Annual Report for the sampling period 1st June 2013–31st May 2014; TropWATER, James Cook University: Cairns, Australia, 2015; p. 226. Available online: https://elibrary.gbrmpa.gov.au/jspui/handle/11017/2976 (accessed on 14 March 2022).
- McKenzie, L.J.; Campbell, S.J.; Roder, C.A. Seagrass-Watch: Manual for Mapping & Monitoring Seagrass Resources, 2nd ed.; QFS, NFC: Cairns, Australia, 2003. [Google Scholar]
- McKenzie, L.J.; Yoshida, R.L.; Unsworth, R.K.F. Disturbance influences the invasion of a seagrass into an existing meadow. Mar. Pollut. Bull. 2014, 86, 186–196. [Google Scholar] [CrossRef]
- Environmental Systems Research Institute. ArcGIS Desktop: Release 10.7; Environmental Systems Research Institute: Redlands, CA, USA, 2021. [Google Scholar]
- Labelbox Labelbox. Available online: https://labelbox.com (accessed on 19 May 2022).
- Planet. Planet Imagery Product Specifications; Planet Labs Inc.: San Francisco, CA, USA, 2021; p. 100. [Google Scholar]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Labs Inc.: San Francisco, CA, USA, 2017; Available online: https://api.planet.com (accessed on 14 March 2022).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- Wright, M.N.; Ziegler, A. Ranger: A Fast Implementation of Random Forests for High Dimensional Data in C++ and R. J. Stat. Softw. 2017, 77, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Esri Inc. ArcGIS Pro (Version 2.5); Environmental Systems Research Institute: Redlands, CA, USA, 2021; Available online: https://www.esri.com/en-us/arcgis/products/arcgis-pro/overview (accessed on 14 March 2022).
- Joseph, V.R. Optimal ratio for data splitting. Stat. Anal. Data Min. ASA Data Sci. J. 2022, 1–8. [Google Scholar] [CrossRef]
- Stephenson, T.; Stephenson, A.; Tandy, G. The structure and ecology of Low Isles and other reefs. Great Barrier Reef Exped. 1928–1929 Sci. Rep. 1931, 3, 17–112. [Google Scholar]
- Manton, S.M.; Stephenson, T.A. Ecological surveys of coral reefs. Sci. Rep./Great Barrier Reef Exped. 1928–1929 1935, 3, 273–312. [Google Scholar]
- van R. Classen, D.; Jupp, D.; Bolton, J.J.; Zell, L. An Initial Investigation into the Mapping of Seagrass and Water Colour with CZCS and Landset in North Queensland, Australia; Great Barrier Reef Marine Park Authority and CSIRO Division of Water and Land Resources: Townsville, Australia, 1984; p. 19. [Google Scholar]
- McKenzie, L.J.; Yoshida, R.L.; Grech, A.; Coles, R. Queensland seagrasses. Status 2010—Torres Strait and East Coast; Fisheries Queensland (DEEDI): Cairns, Australia, 2010; p. 6. [Google Scholar]
- Rasheed, M.A. Seagrass Monitoring in Queensland Ports. Program Summary 2013. A Report for Queensland Ports Association (QPA) TropWATER Publication 13/25; Centre for Tropical Water & Aquatic Ecosystem Research, JCU: Cairns, Australia, 2013; p. 30. [Google Scholar]
- Chartrand, K.M.; Szabó, M.; Sinutok, S.; Rasheed, M.A.; Ralph, P.J. Living at the margins—The response of deep-water seagrasses to light and temperature renders them susceptible to acute impacts. Mar. Environ. Res. 2018, 136, 126–138. [Google Scholar] [CrossRef] [Green Version]
- York, P.H.; Carter, A.B.; Chartrand, K.; Sankey, T.; Wells, L.; Rasheed, M.A. Dynamics of a deep-water seagrass population on the Great Barrier Reef: Annual occurrence and response to a major dredging program. Sci. Rep. 2015, 5, 13167. [Google Scholar] [CrossRef]
- Kuo, J.; Lee Long, W.J.; Coles, R.G. Occurrence and fruit and seed biology of Halophila tricostata Greenway (Hydrocharitaceae). Aust. J. Mar. Freshw. Res. 1993, 44, 43–57. [Google Scholar] [CrossRef]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an integrated GIS/remote sensing environment and perspectives for environmental applications. In Environmental Information for Planning, Politics and the Public; Cremers, A., Greve, K., Eds.; Metropolis Verlag: Marburg, Germany, 2000; Volume 2, pp. 555–570. [Google Scholar]
- Roelfsema, C.M.; Lyons, M.; Kovacs, E.M.; Maxwell, P.; Saunders, M.I.; Samper-Villarreal, J.; Phinn, S.R. Multi-temporal mapping of seagrass cover, species and biomass: A semi-automated object based image analysis approach. Remote Sens. Environ. 2014, 150, 172–187. [Google Scholar] [CrossRef]
- Topouzelis, K.; Makri, D.; Stoupas, N.; Papakonstantinou, A.; Katsanevakis, S. Seagrass mapping in Greek territorial waters using Landsat-8 satellite images. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 98–113. [Google Scholar] [CrossRef]
- Turissa, P.; Bisman, N.; Vincentius, S.; Dony, K.; Hawis, M. Evaluation Methods of Change Detection of Seagrass Beds in the Waters of Pajenekang and Gusung Selayar. Trends Sci. 2021, 18, 677. [Google Scholar] [CrossRef]
- Su, L.; Huang, Y. Seagrass Resource Assessment Using WorldView-2 Imagery in the Redfish Bay, Texas. J. Mar. Sci. Eng. 2019, 7, 98. [Google Scholar] [CrossRef] [Green Version]
- Kovacs, E.M.; Roelfsema, C.; Udy, J.; Baltais, S.; Lyons, M.; Phinn, S. Cloud Processing for Simultaneous Mapping of Seagrass Meadows in Optically Complex and Varied Water. Remote Sens. 2022, 14, 609. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Johnston, D.W. Unoccupied Aircraft Systems in Marine Science and Conservation. Annu. Rev. Mar. Sci. 2019, 11, 439–463. [Google Scholar] [CrossRef] [Green Version]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Klemas, V.V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 31, 1260–1267, 1268. [Google Scholar] [CrossRef] [Green Version]
- Pell, T.; Li, J.Y.Q.; Joyce, K.E. Demystifying the Differences between Structure-from-Motion Software Packages for Pre-Processing Drone Data. Drones 2022, 6, 24. [Google Scholar] [CrossRef]
- Carpenter, S.; Byfield, V.; Felgate, S.L.; Price, D.M.; Andrade, V.; Cobb, E.; Strong, J.; Lichtschlag, A.; Brittain, H.; Barry, C.; et al. Using Unoccupied Aerial Vehicles (UAVs) to Map Seagrass Cover from Sentinel-2 Imagery. Remote Sens. 2022, 14, 477. [Google Scholar] [CrossRef]
- Duffy, J.P.; Pratt, L.; Anderson, K.; Land, P.E.; Shutler, J.D. Spatial assessment of intertidal seagrass meadows using optical imaging systems and a lightweight drone. Estuar. Coast. Shelf Sci. 2018, 200, 169–180. [Google Scholar] [CrossRef]
- Nahirnick, N.K.; Reshitnyk, L.; Campbell, M.; Hessing-Lewis, M.; Costa, M.; Yakimishyn, J.; Lee, L. Mapping with confidence; delineating seagrass habitats using Unoccupied Aerial Systems (UAS). Remote Sens. Ecol. Conserv. 2019, 5, 121–135. [Google Scholar] [CrossRef]
- Moniruzzaman, M.; Islam, S.; Lavery, P.; Bennamoun, M. Faster R-CNN Based Deep Learning for Seagrass Detection from Underwater Digital Images. In Proceedings of the 2019 Digital Image Computing: Techniques and Applications (DICTA), Perth, Australia, 2–4 December 2019; pp. 1–7. [Google Scholar]
- Reus, G.; Möller, T.; Jäger, J.; Schultz, S.T.; Kruschel, C.; Hasenauer, J.; Wolff, V.; Fricke-Neuderth, K. Looking for Seagrass: Deep Learning for Visual Coverage Estimation. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Yamato, C.; Ichikawa, K.; Arai, N.; Tanaka, K.; Nishiyama, T.; Kittiwattanawong, K. Deep neural networks based automated extraction of dugong feeding trails from UAV images in the intertidal seagrass beds. PLoS ONE 2021, 16, e0255586. [Google Scholar] [CrossRef]
- Weidmann, F.; Jäger, J.; Reus, G.; Schultz, S.T.; Kruschel, C.; Wolff, V.; Fricke-Neuderth, K. A Closer Look at Seagrass Meadows: Semantic Segmentation for Visual Coverage Estimation. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Rindlisbacher, T.; Chabbey, L. Guidance on the Determination of Helicopter Emissions; Federal Office of Civial Aviation FOCA: Bern, Switzerland, 2015; p. 29. [Google Scholar]
- Li, K.W.; Sun, C.; Li, N. Distance and Visual Angle of Line-of-Sight of a Small Drone. Appl. Sci. 2020, 10, 5501. [Google Scholar] [CrossRef]
- Cleguer, C.; Kelly, N.; Tyne, J.; Wieser, M.; Peel, D.; Hodgson, A. A Novel Method for Using Small Unoccupied Aerial Vehicles to Survey Wildlife Species and Model Their Density Distribution. Front. Mar. Sci. 2021, 8, 640338. [Google Scholar] [CrossRef]
- Campbell, S.; Rasheed, M.; Thomas, R. Seagrass habitat of Cairns Harbour and Trinity Inlet: December 2001; DPI Information Series QI02059; DPI: Cairns, Australia, 2002; p. 25. Available online: https://bit.ly/3IwyqER (accessed on 14 March 2022).
- Oreska, M.P.J.; McGlathery, K.J.; Porter, J.H. Seagrass blue carbon spatial patterns at the meadow-scale. PLoS ONE 2017, 12, e0176630. [Google Scholar] [CrossRef]
- Ricart, A.M.; Pérez, M.; Romero, J. Landscape configuration modulates carbon storage in seagrass sediments. Estuar. Coast. Shelf Sci. 2017, 185, 69–76. [Google Scholar] [CrossRef]
- Ricart, A.M.; York, P.H.; Rasheed, M.A.; Pérez, M.; Romero, J.; Bryant, C.V.; Macreadie, P.I. Variability of sedimentary organic carbon in patchy seagrass landscapes. Mar. Pollut. Bull. 2015, 100, 476–482. [Google Scholar] [CrossRef]
- Carter, A.B.; Collier, C.; Lawrence, E.; Rasheed, M.A.; Robson, B.J.; Coles, R. A spatial analysis of seagrass habitat and community diversity in the Great Barrier Reef World Heritage Area. Sci. Rep. 2021, 11, 22344. [Google Scholar] [CrossRef]
- Rock, B.M.; Daru, B.H. Impediments to Understanding Seagrasses’ Response to Global Change. Front. Mar. Sci. 2021, 8, 608867. [Google Scholar] [CrossRef]
- Dalby, O.; Sinha, I.; Unsworth, R.K.F.; McKenzie, L.J.; Jones, B.L.; Cullen-Unsworth, L.C. Citizen Science Driven Big Data Collection Requires Improved and Inclusive Societal Engagement. Front. Mar. Sci. 2021, 8, 610397. [Google Scholar] [CrossRef]
- Jones, B.L.; Unsworth, R.K.F.; McKenzie, L.J.; Yoshida, R.L.; Cullen-Unsworth, L.C. Crowdsourcing conservation: The role of citizen science in securing a future for seagrass. Mar. Pollut. Bull. 2018, 134, 210–215. [Google Scholar] [CrossRef] [PubMed]
- Carter, A.; McKenna, S.; Rasheed, M.; Collier, C.; McKenzie, L.; Pitcher, R.; Coles, R. Seagrass Mapping Synthesis: A Resource for Coastal Management in the Great Barrier Reef; NESP TWQ project 3.2.1 and 5.4; Centre for Tropical Water & Aquatic Ecosystem Research (TropWATER), James Cook Univ.: Cairns, Australia, 2020. [Google Scholar] [CrossRef]
- Beaman, R.J. High-Resolution Depth Model for the Great Barrier Reef—30 m; Geoscience Australia: Canberra, Australia, 2017. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seagrass Habitat Type | Area (km2) | Percentage of Total Extent |
|---|---|---|
| Estuary intertidal | 85.0 | 0.2 |
| Estuary shallow subtidal | 36.5 | 0.1 |
| Estuary deep subtidal | 0.2 | 0.001 |
| Coastal intertidal | 352.2 | 1.0 |
| Coastal shallow subtidal | 2080.5 | 5.8 |
| Coastal deep subtidal | 2811.9 * | 7.9 * |
| Reef intertidal | 213.5 | 0.6 |
| Reef shallow subtidal | 83.2 | 0.2 |
| Reef deep subtidal | 10,168.7 * | 28.5 * |
| Offshore intertidal | 18.4 | 0.1 |
| Offshore shallow subtidal | 37.6 | 0.1 |
| Offshore deep subtidal | 19,791.2 * | 55.5 * |
| Total | 35,679 |
| Seagrass Organisation | Spatial Scale | Temporal Scale | Examples of Measures | |
|---|---|---|---|---|
| Fine (micro)-scale | Patch/Patches | 1–100 m | Weekly, monthly, annual | Areal extent, abundance per unit area (photoquadrats, percent cover and/or biomass, shoot density), species, shoot height, rhizome biomass, reproductive health (flower, fruit, and seed abundance), macroalgae abundance |
| Meadow | 100 m–1 km | Seasonal (3–4 months) to annual | Areal extent, meadowscape, abundance per unit area (photoquadrats, percent cover and/or biomass), species, reproductive health (flower, fruit, and seed abundance), macroalgae abundance | |
| Meso-scale | Meso-system meadows e.g., small bay/estuary | 1–10 km | Seasonal (3–4 months) to annual, decadal | Areal extent, meadowscape, abundance (per unit area), species presence/absence, macroalgae abundance |
| Subregional meadows e.g., large bay | 10–50 km | Seasonal (3–4 months) to annual, decadal | Areal extent (presence/absence), meadowscape (categories), abundance (per unit area) | |
| Regional meadows e.g., large island group | 50–100 km | Biannual to annual, decadal | Areal extent (presence/absence), meadowscape (categories), abundance (narrow categories) | |
| Broad (macro)-scale | Biome meadows (e.g., dry tropics, wet tropics, NRM region) | >100 km | decadal | Areal extent (presence/absence), meadowscape (categories), abundance (broad categories) |
| Observing Type | Definition | Effective Resolution | Temporal Resolution | Approach/ Instrument | Spatial Extent per Observation |
|---|---|---|---|---|---|
| Direct in situ | Measures taken directly from the object/feature, i.e., within human reach. | <3 m | On-demand to seasonal | by foot; diver (free, SCUBA) | 10 m2 |
| Measures taken directly from the object/feature via a device, i.e., beyond human reach. | ≥3 ≤10 m | On-demand to seasonal | grab, rake, sled | 100 m2 | |
| Near Earth Observing | Active and passive remotely sensed data collected from submerged sensors at a depth beyond human reach. | 10−2 ≤10 m | On-demand to seasonal | camera (drop-camera, Closed-Circuit Television), Autonomous Underwater Vehicle (AUV), helicopter, accoustic (from a boat). | 100 m2 |
| High Earth Observing | Near-field passive remotely sensed data collected from airborne sensors at an altitude >10 m above the object/feature. | 10−3 ≤100 m | On-demand to monthly to biannual | Unoccupied Aerial Vehicle (UAV), Unoccupied Aerial Systems (UAS), helicopter, fixed wing aircraft | 5 ha |
| Earth Observing from Space | Passive remotely sensed data collected from spaceborne sensors, at an altitude >105 m above the object/feature. | ~1 ≤100 m | On-demand to 1 to 10 days [39] | satellite, spacecraft | 185 km2 |
| Maturity of Methodology (Weighting = 0.5) | Validation (Observing Platforms) (Weighting = 1) | Representativeness (AOI) (Weighting = 1) | Directness (Mapping Approach) (Weighting = 1) | Measured Mapping Error (Weighting = 1) |
|---|---|---|---|---|
Score = 1
| Score = 1
| Score = 1
| Score = 1
| Score = 1
|
Score = 2
| Score = 2
| Score = 2
| Score = 2
| Score = 2
|
Score = 3
| Score = 3
| Score = 3
| Score = 3
| Score = 3
|
| Case Study (Coordinates, Name) | Observing Platform (Data Capture Date) | Habitat Type (Sediment) | Seagrass Community (Mean Cover ± SE) |
|---|---|---|---|
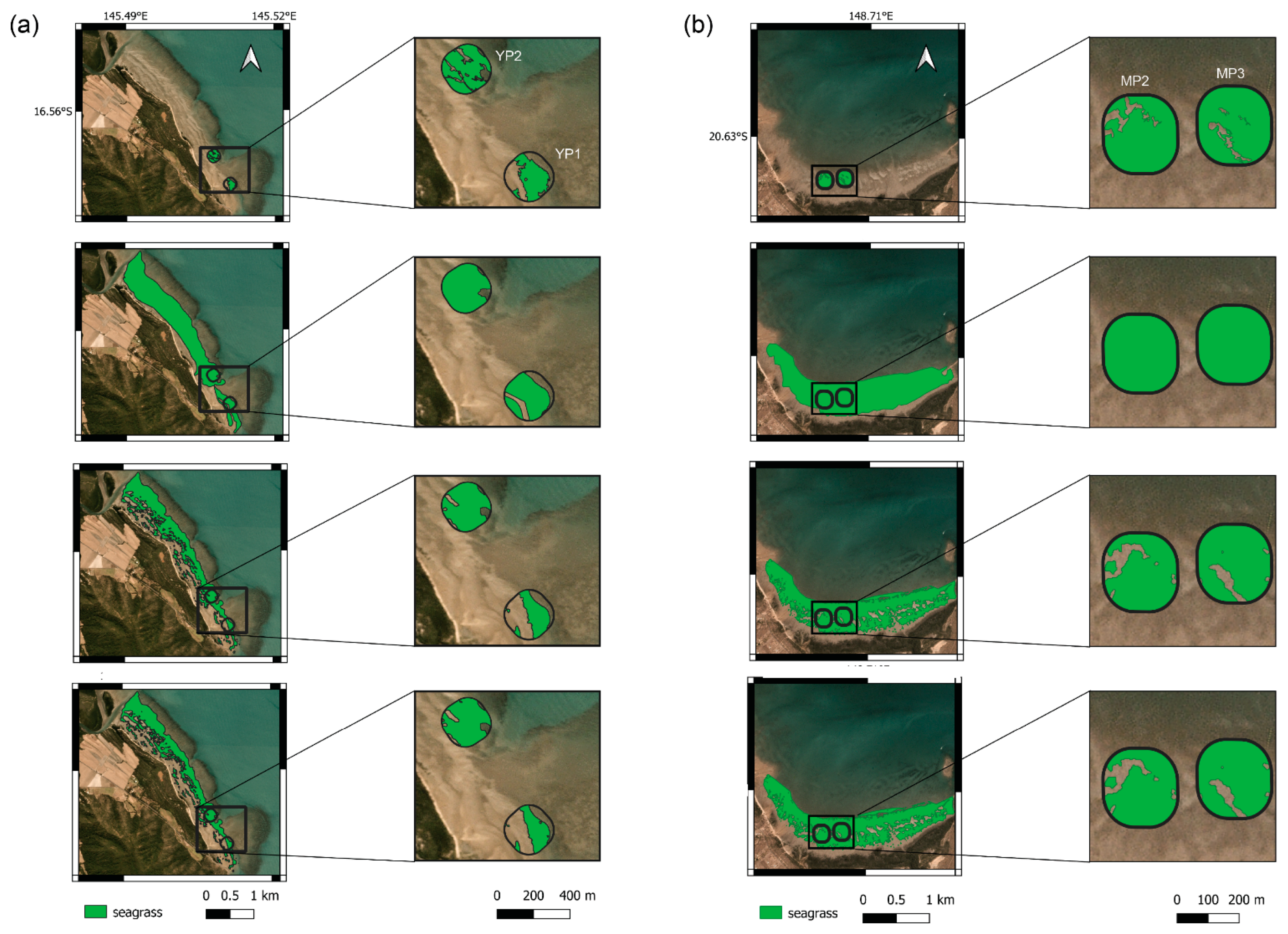
| Coastal clear water (16.564°S, 145.511°E) Yule Point | Direct in situ (by foot) (15 October 2017, 13–14 August 2019, 6 Sepetember 2020) Airborne (UAV) (20 July 2020) Airborne (helicopter) (5 September 2017) Spaceborne (satellite) (5 September 2017, 9 August 2019) | coastal intertidal/ shallow subtidal (fine sand, light coloured, terrigenous) | Halodule uninervis, Halophila ovalis (15.0 ± 1.6% cover) |
| Coastal turbid water (20.635°S, 148.709°E) Midge Point | Direct in situ (by foot) (17 September 2017) Airborne (helicopter) (17 October 2017) Spaceborne (satellite) (9 October 2017) | coastal intertidal/ shallow subtidal (mud/fine sand, dark coloured, terrigenous) | Zostera muelleri, Halodule uninervis (24.9 ± 1.8% cover) |
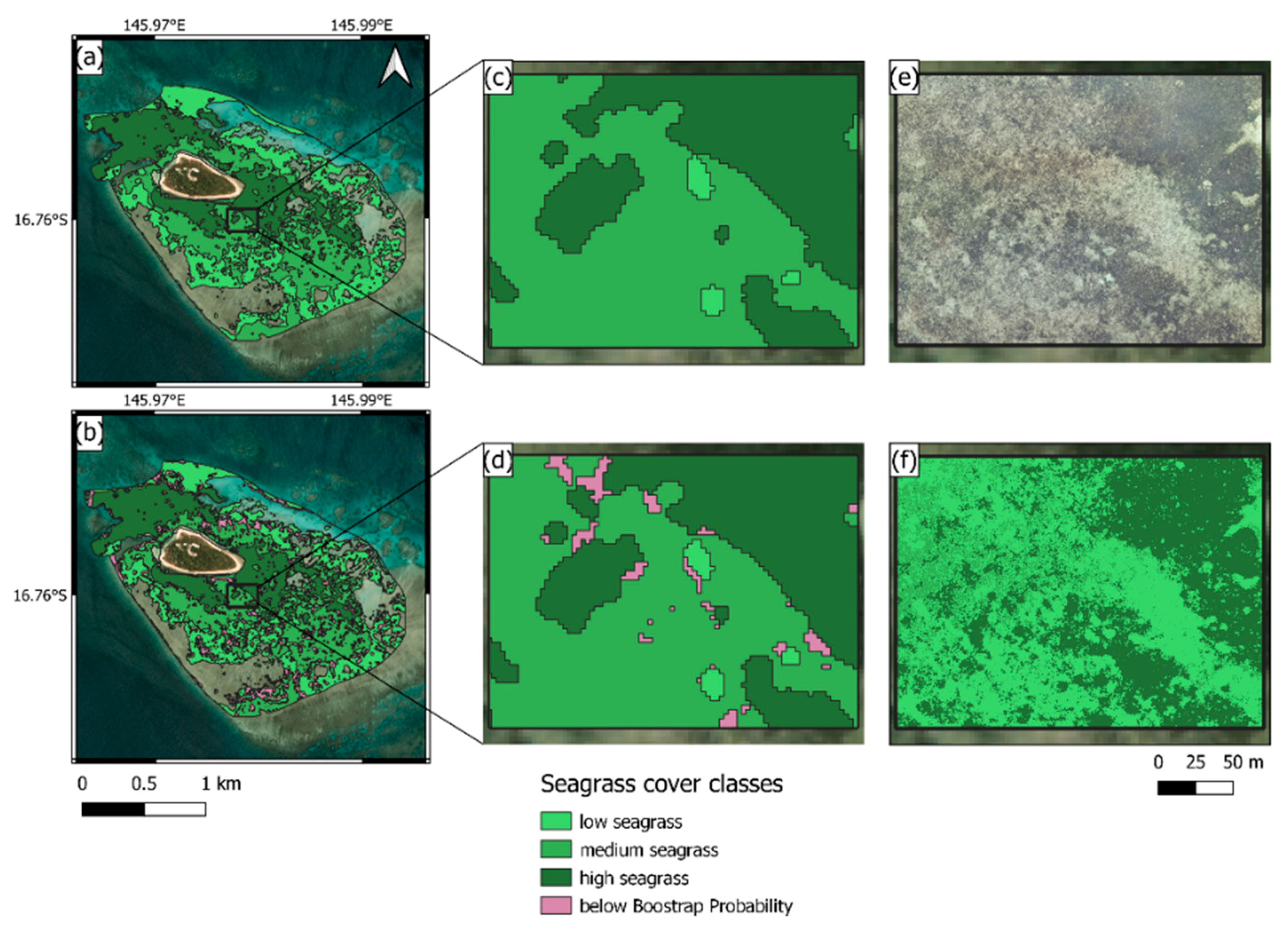
| Reef clear water (16.762°S, 145.976°E) Green Island (Wunyami) | Direct in situ (by foot) (25–27 November 2020) Airborne (UAV) (25 November 2020) Spaceborne (satellite) (5 November 2020) | reef intertidal/ shallow subtidal (coase sand/sand, light coloured, biogenous-37% CaCO3) | Thalassia hemprichii, Halodule uninervis, Syringodium isoetifolium, Cymodocea serrulata, Cymodocea rotundata, Halophila ovalis (36.4 ± 2.2% cover) |
| AOI | Mapping Scale | Site (ha) | Earth Observing Platform | Resolution or Bootstrap Probability | Seagrass Area | |
|---|---|---|---|---|---|---|
| ha | Range | |||||
| Coastal clear water (Yule Pt) | Fine-scale | YP1 | Direct in situ—by foot | high | 2.86 | |
| (4.58) | High earth—helicopter | low * | 3.95 | 3.34–4.43 | ||
| Spaceborne—satellite | 100% | 2.19 | 2.19–2.33 | |||
| 60% | 2.33 | |||||
| YP2 | Direct in situ—by foot | high | 4.44 | |||
| (5.09) | High earth—helicopter | low * | 5.05 | 4.93–5.08 | ||
| Spaceborne—satellite | 100% | 4.69 | 4.69–4.78 | |||
| 60% | 4.78 | |||||
| Meso-scale | (193.08) | High earth—helicopter | low * | 144.06 | 134.61–151.85 | |
| Spaceborne—Satellite | 100% | 105.32 | 105.32–14.63 | |||
| 90% | 110.55 | |||||
| 80% | 112.45 | |||||
| 60% | 114.63 | |||||
| Coastal turbid water (Midge Pt) | Fine-scale | MP2 | Direct in situ—by foot | high | 4.7 | |
| (5.27) | High earth—helicopter | low * | 5.268 | n.a. | ||
| Spaceborne—Satellite | 100% | 4.43 | 4.43–4.48 | |||
| 60% | 4.48 | |||||
| MP3 | Direct in situ—by foot | high | 4.89 | |||
| (5.27) | High earth—helicopter | low * | 5.268 | n.a. | ||
| Spaceborne—Satellite | 100% | 4.76 | 4.76–4.78 | |||
| 60% | 4.78 | |||||
| Meso-scale | (130.05) | High earth—helicopter | low * | 117.79 | 114.36–120.93 | |
| Spaceborne—Satellite | 100% | 96.68 | 96.68–100.44 | |||
| 90% | 98.88 | |||||
| 80% | 99.55 | |||||
| 60% | 100.44 | |||||
| AOI | Earth Observing Platform | Map Figure | Area (ha) | BP | Seagrass Abundance Class | Rubble/Algae or bBP | Total Seagrass Area | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Absent | Low | Medium | High | |||||||
| Coastal clear water (Yule Pt) | by foot | Figure 9b(ii) | 0.8020 | n.a. | n.a. | n.a. | n.a. | n.a. | n.a. | 0.7053 |
| UAV | Figure 9b(iv) | 0.8020 | n.a. | 0.1192 | 0.4854 | n.a. | 0.1701 | 0.0273 | 0.6555 | |
| satellite | Figure 9a(ii) | 49.65 | 100% | 22.71 | 15.60 | n.a. | 5.18 | 6.21 * | 20.78 | |
| (meso-scale) | 49.65 | 90% | 24.45 | 17.46 | n.a. | 5.86 | 1.95 * | 23.32 | ||
| 49.65 | 80% | 24.90 | 18.02 | n.a. | 6.08 | 0.71 * | 24.09 | |||
| Figure 9a(i) | 49.65 | 60% | 25.12 | 18.36 | n.a. | 6.21 | 0.03 * | 24.57 | ||
| Reef clear water (Green Is) | UAV | Figure 10f | 4.512 | n.a. | 0 | 2.193 | 0.429 | 1.887 | 0 | 4.512 |
| satellite | Figure 10d | 4.512 | 100% | 0 | 0.071 | 2.594 | 1.685 | 0.162 | 4.512 | |
| (fine-scale) | Figure 10c | 4.512 | 60% | 0 | 0.072 | 2.695 | 1.745 | 0 | 4.512 | |
| satellite | Figure 10b | 316.62 | 100% | 79.13 | 26.59 | 71.49 | 63.25 | 32.17 * | 316.75 | |
| (meso-scale) | 316.66 | 90% | 82.8 | 31.09 | 80.12 | 66.05 | 6.7 * | 316.82 | ||
| 316.73 | 80% | 83.24 | 32.17 | 81.48 | 66.57 | 2.07 * | 316.89 | |||
| Figure 10a | 316.86 | 60% | 83.45 | 32.89 | 81.92 | 66.67 | 0.08 * | 316.99 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
McKenzie, L.J.; Langlois, L.A.; Roelfsema, C.M. Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation. Remote Sens. 2022, 14, 2604. https://doi.org/10.3390/rs14112604
McKenzie LJ, Langlois LA, Roelfsema CM. Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation. Remote Sensing. 2022; 14(11):2604. https://doi.org/10.3390/rs14112604
Chicago/Turabian StyleMcKenzie, Len J., Lucas A. Langlois, and Chris M. Roelfsema. 2022. "Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation" Remote Sensing 14, no. 11: 2604. https://doi.org/10.3390/rs14112604
APA StyleMcKenzie, L. J., Langlois, L. A., & Roelfsema, C. M. (2022). Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation. Remote Sensing, 14(11), 2604. https://doi.org/10.3390/rs14112604