1. Introduction
Synthetic aperture radar (SAR) is a microwave sensor with the advantages of all-weather observation, high resolution, and high precision [
1]. Interferometric synthetic aperture radar (InSAR) technology has wide airborne and satellite applications and plays an important role in terrain mapping and deformation measurement [
2,
3,
4,
5]. Compared with airborne InSAR or satellite InSAR, ground-based interferometric synthetic aperture radar (GB-InSAR) has the advantages of short observation intervals [
6], flexible operation, and high resolution.
GB-InSAR technology can be applied to generate a digital elevation model (DEM) with high spatial resolution and high accuracy. In 2001, Pieraccini M et al. used one GB-InSAR with two antennas with a vertical baseline to obtain the DEM of a slope [
7]. Due to the influence of the periodicity of the complex phase, the GB-InSAR interferogram must be accurately unwrapped in order to generate a high-quality DEM. Phase unwrapping (PU) is one of the most important techniques in GB-InSAR processing [
8]. PU methods can be divided into two types according to the number of baselines [
9]: single-baseline phase unwrapping (SB PU) and multi-baseline phase unwrapping (MB PU).
The PU problem is an ill-posed inverse problem. Many SB PU methods have been proposed, and one representative method is the minimum cost flow (MCF) algorithm [
10]. This method combines the advantages of the path segmentation method and the minimum norm method and transforms the minimization problem in phase unwrapping into solving the MCF problem in the network. However, almost all the SB PU algorithms depend on the phase continuity assumption, i.e., the assumption that the absolute phase differences between neighboring pixels are less than
[
11]. When there are complex terrains with rapid changes, such as cliffs and buildings, this assumption is commonly invalid. Therefore, the unwrapping accuracy of the abovementioned SB methods may be low for scenes with complex terrains.
MB PU technology is based on repeated observations with different interferometric parameters. It can take advantage of baseline diversity to significantly increase the ambiguity intervals of interferometric phases which completely overcomes the limitation of the Itoh condition. MB PU methods can be divided into two types. One type is parametric-based methods, which utilizes maximum likelihood estimation [
12] or maximum posteriori probability criterion [
13] to build a statistical framework to estimate the phase ambiguity. Another is the nonparametric-based method, which translates the MB PU problem into an unsupervised-learning problem. In 2011, Yu proposed a cluster-analysis-based multi-baseline phase unwrapping algorithm (CA-based MB PU). This algorithm is realized by clustering pixels with the same ambiguity vector into a cluster, and then the cluster center is used to unwrap the phases of pixels cluster by cluster [
14].
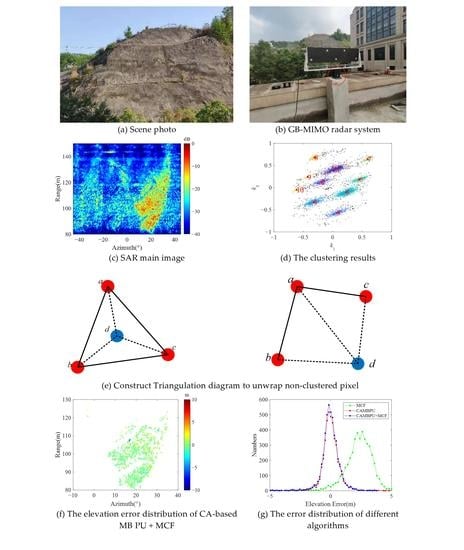
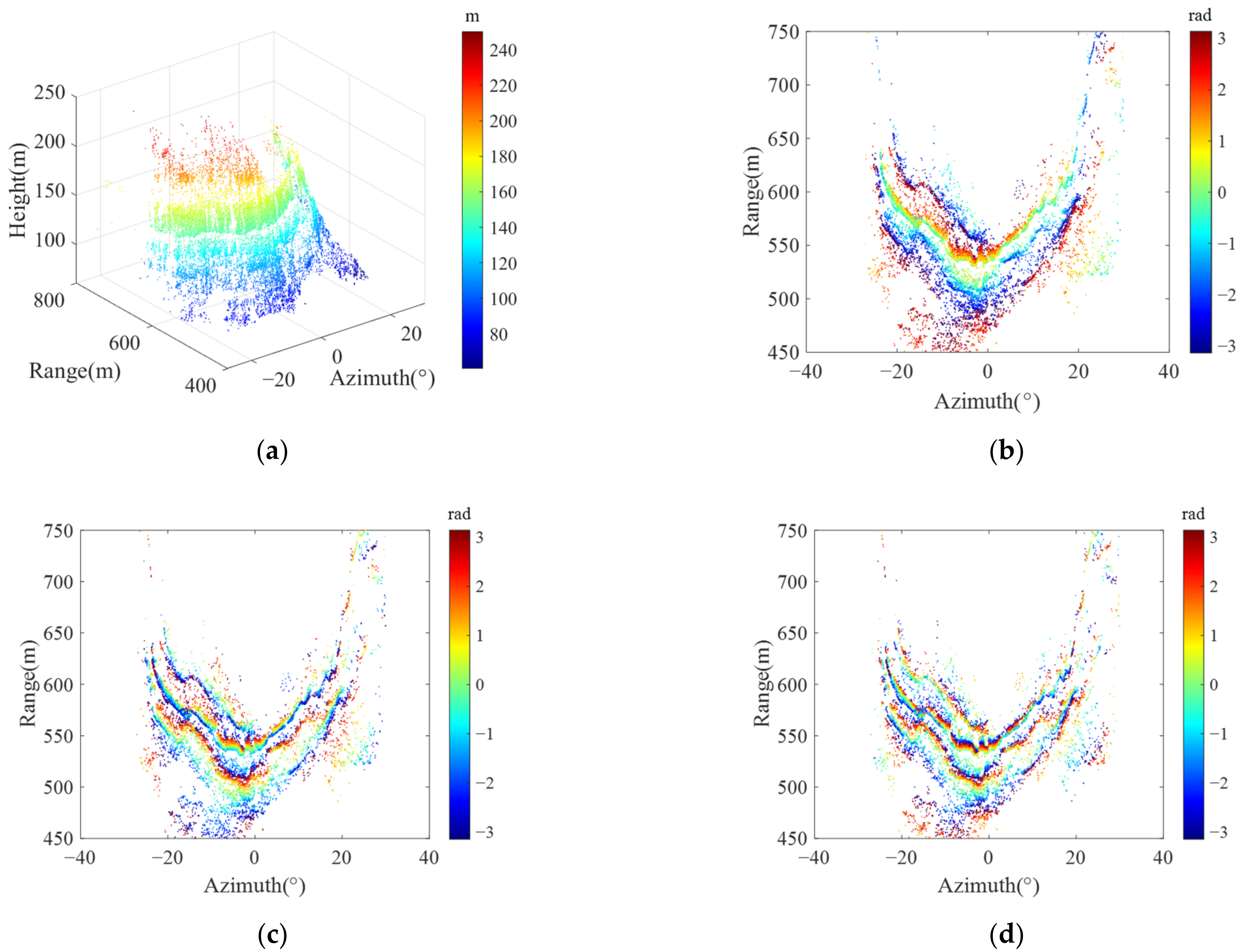
In GB-InSAR, interferograms with different baselines can be acquired and unwrapped with CA-based MB methods. For the permanent scatterers (PSs) selected with the amplitude dispersion method, due to the disturbances of noise and the atmosphere, not all PSs can be accurately clustered, and this affects the unwrapping accuracy.
Therefore, this paper proposes an improved MB PU method which combines the advantages of the CA-based MB PU method and the MCF. Based on the CA-based MB PU, a spatial-distribution-based denoising algorithm (SD-based DA) is utilized to filter out isolated error pixels in each cluster and then establish the connectivity graph between any non-clustered pixel and its adjacent unwrapped cluster pixels. Then, the MCF unwrapping method can be used to solve each non-clustered pixel. Simulated and experimental datasets are processed with the proposed method and they illustrate that the improved method is effective and robust to noise.
2. Interferometry Principle
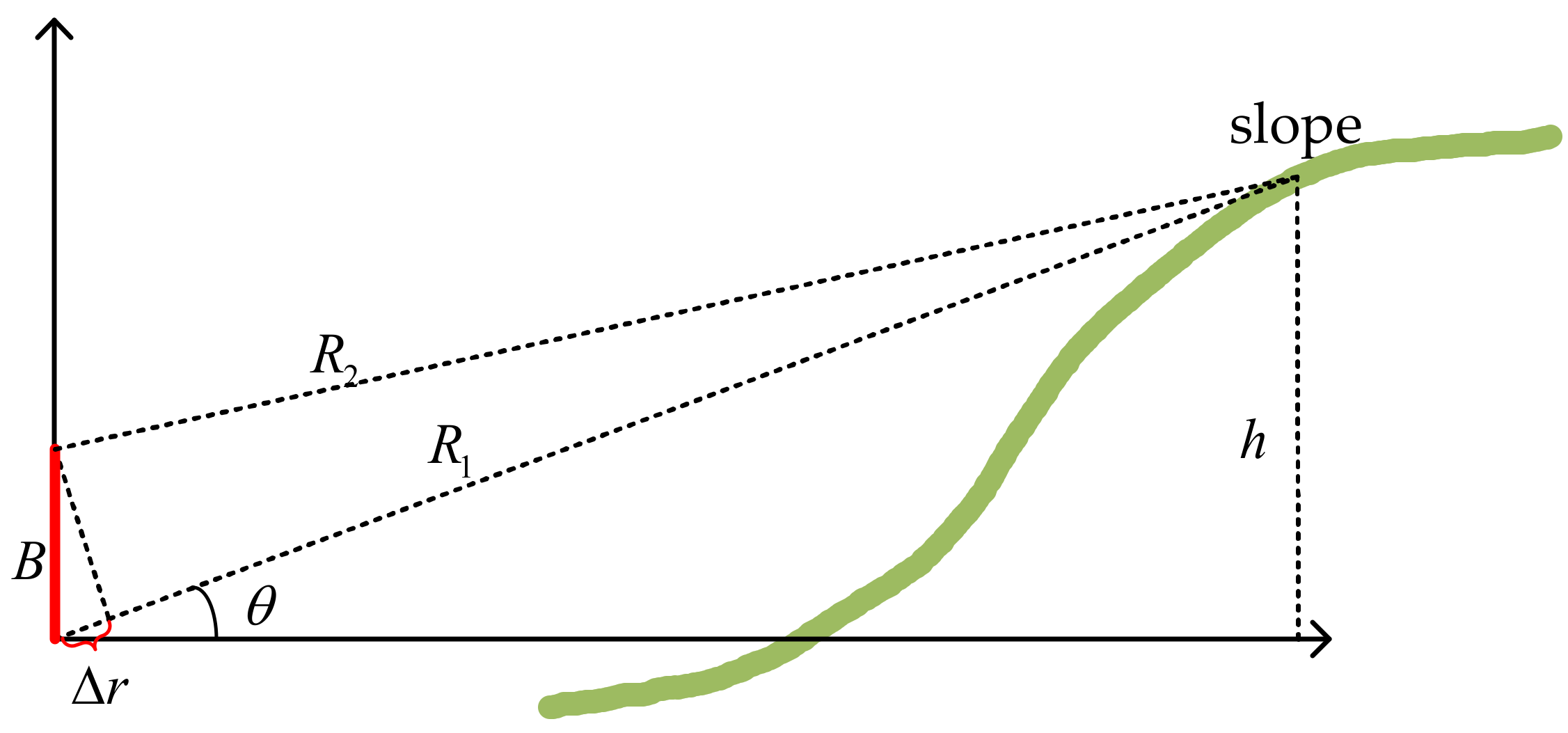
By varying the height of GB-InSAR, interferometric images of different baselines can be obtained. With knowledge of the GB-InSAR geometry, the phase difference can be converted into an altitude for each image pixel [
15]. A schematic of interferometric geometry is shown in
Figure 1.
is the terrain height of the target,
and
are the slant range of the target from the antenna in different measurements,
is the elevation angle, and
is the vertical baseline. Therefore, the absolute phase can be given by:
where
is the wavelength. According to the cosine law, the relationship between
,
,
, and
can be given by:
Because
and
,
is given by:
According to the elevation angle and slant range, the real terrain
is given by [
16]:
In actual data processing, due to the influence of the periodicity of the complex phase, we can only get the wrapped phase:
where
and integer
is the ambiguity number. The purpose of PU is to recover the absolute phase from the wrapped phase. Then, the accurate terrain information can be obtained according to Equation (4).
3. CA-Based MB PU Algorithm
CA-based MB PU transforms the phase unwrapping problem into an unsupervised learning problem. Pixels with the same ambiguity vector can be clustered into one cluster based on a recognizable mathematical pattern. The terrain heights of all pixels in the same cluster can be estimated through the cluster center cluster by cluster [
14].
In the case of two interferograms with different baselines, for a pixel with the terrain height
, it can be calculated from (4) that:
where
and
are the vertical baselines and
and
are the ambiguity numbers of this pixel in each interferogram. MB PU essentially solves the phase ambiguity through the Chinese remainder theorem, so it is critical to ensure that the baselines are relatively prime.
This phase restriction holds in the ideal case. It can be utilized to resolve the phase ambiguity vector . The term AmbiguitySet is defined to represent the set of pixels whose ambiguity vectors are the same.
Transforming (7) into a linear equation with
as the independent variable and
as the dependent variable, we get:
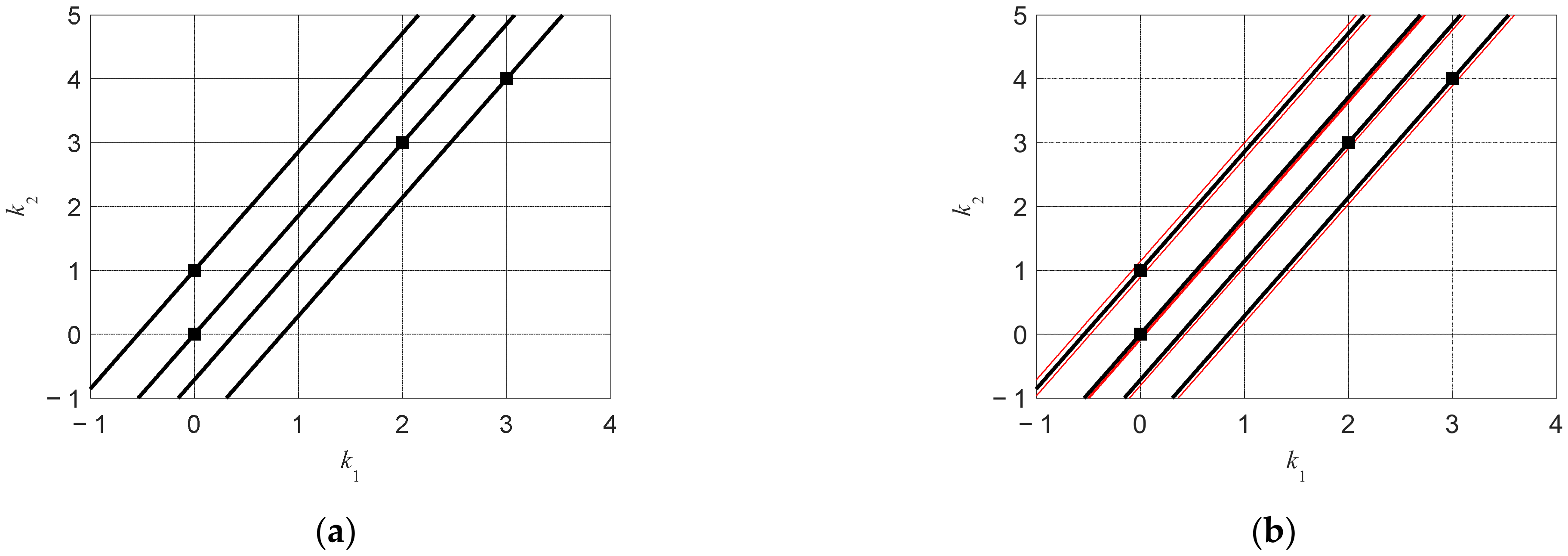
where the slope is
and the intercept is
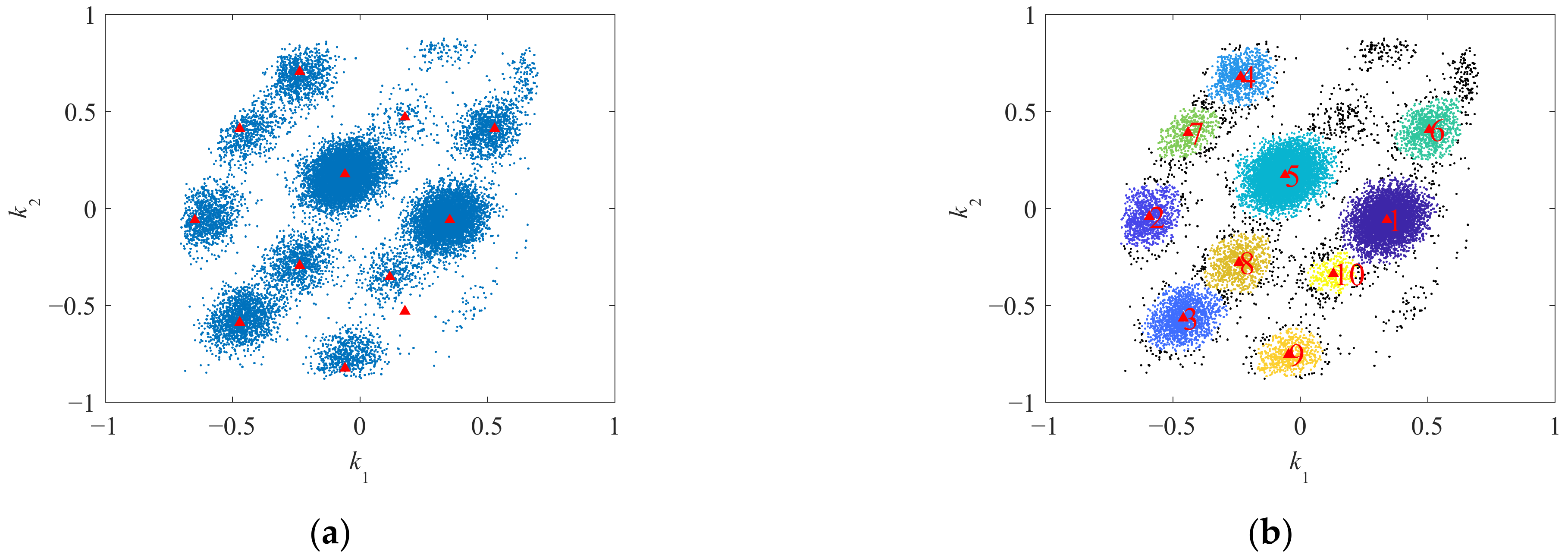
. Because they have the same slope and intercept, the lines of pixels in an
AmbiguitySet overlap each other, as is shown in
Figure 2a.
Without considering noise,
and
can be calculated exactly by searching the ambiguity vector in the search range of
and
. Considering the noise,
and
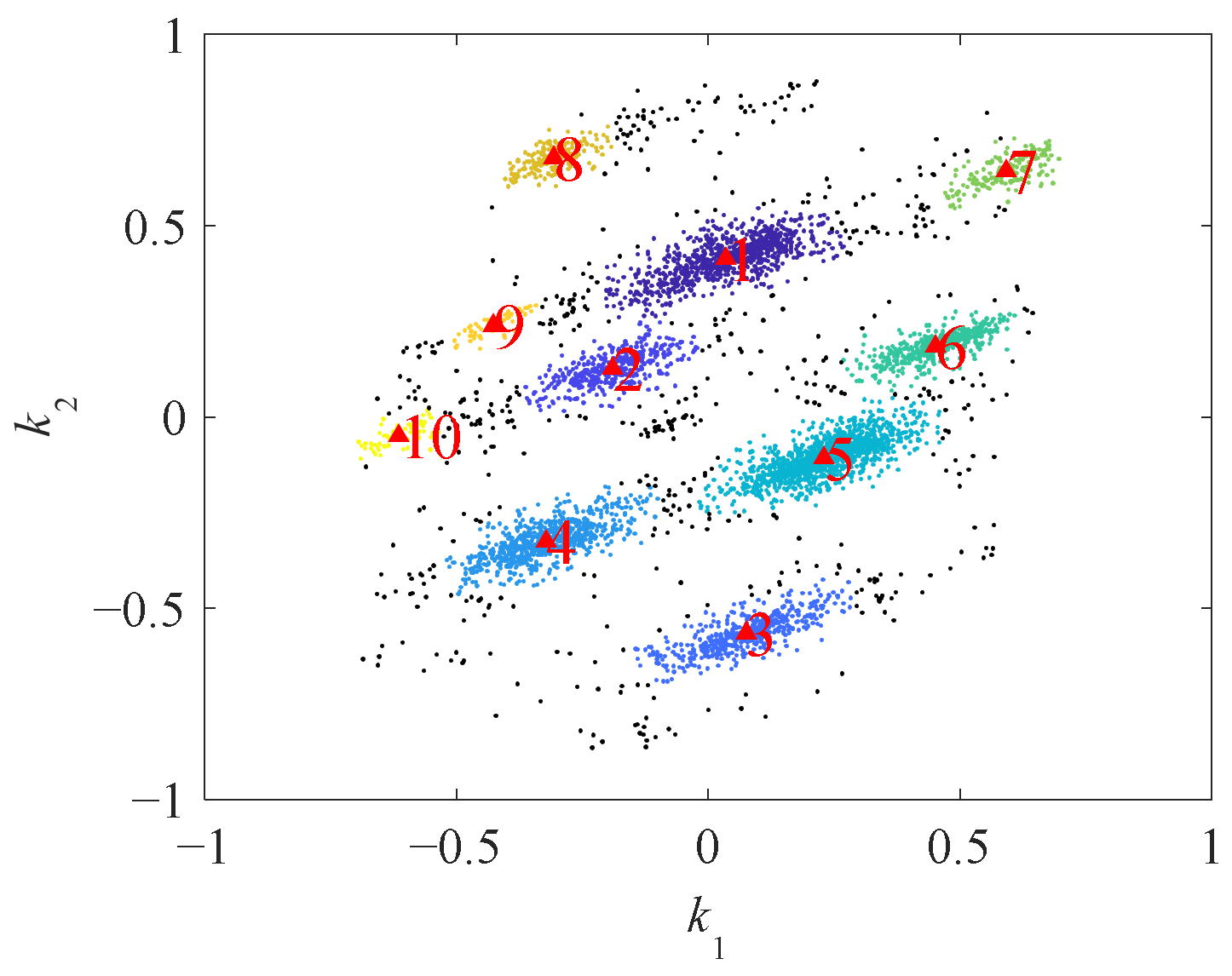
are distorted. For a line, although its slope is still a constant, its intercept is affected. As shown in
Figure 2b, those lines corresponding to pixels with the same
AmbiguitySet no longer overlap due to noise, but there is an obvious clustering phenomenon. The centerline of each cluster can be found through the CA method and can be considered the overlapped line without noise. The centerline of a cluster is obtained by averaging all pixels in the cluster. To a certain extent, this method can effectively overcome the influence of noise. The exact ambiguity vector can be found using the following searching method. Assume that Baseline
1/Baseline
2 = 3/5 and that there is no ambiguity solution. Seven ambiguity vectors are generated by the ratio of Baseline
1 and Baseline
2, which are (0, 0), (0, 1), (1, 1), (1, 2), (1, 3), (2, 3), and (2, 4). Each ambiguity vector has a corresponding straight line. For the centerline of each cluster, find the nearest one to it from those seven straight lines. The ambiguity vector corresponding to the nearest straight line can be considered that of each cluster.
The above analysis only considers two baselines, and the clustering analysis is made based on the intercept of the lines. For three interferograms with three different baselines, Equation (7) is extended to:
Equation (9) is a spatial linear equation about . When the wrapped phase and the baseline lengths are known, the line passes through , and its direction vector is . The ambiguity vector is an integer point on the line in space. There is also an obvious clustering phenomenon among these parallel lines. These lines can be clustered by their cross points with an arbitrary plane in a 3-D space. At the same noise level, the clustering phenomenon of three interferograms is more obvious than that of two interferograms.
The density-based spatial clustering of applications with noise (DBSCAN) relies on a density-based notion of clusters, which is designed to discover clusters of arbitrary shape [
17]. The key idea is that for each pixel of a cluster, the neighborhood of a given radius has to contain at least a certain number of points, i.e., the density in the neighborhood has to exceed the density threshold. The result of clustering is determined by two important parameters: the neighborhood value
and the density threshold Minpts. Therefore, pixels in an
AmbiguitySet can be clustered by DBSCAN.
4. Improved Method
Compared with the traditional MB PU algorithms, although the CA-based MB PU is more robust, some problems still need to be further resolved. Due to noise, the intersection will deviate from the ideal position. Pixels affected by weak noise, i.e., high-quality pixels, are closer to the cluster center, while pixels affected by strong noise, i.e., low-quality pixels, will deviate much more from the cluster center. Furthermore, when the offset distances of low-quality pixels exceed the threshold of the clustering algorithm, they cannot be accurately clustered. That means that the CA-based MB PU method cannot effectively unwrap low-quality pixels. Above all, this paper proposes an improved PU method.
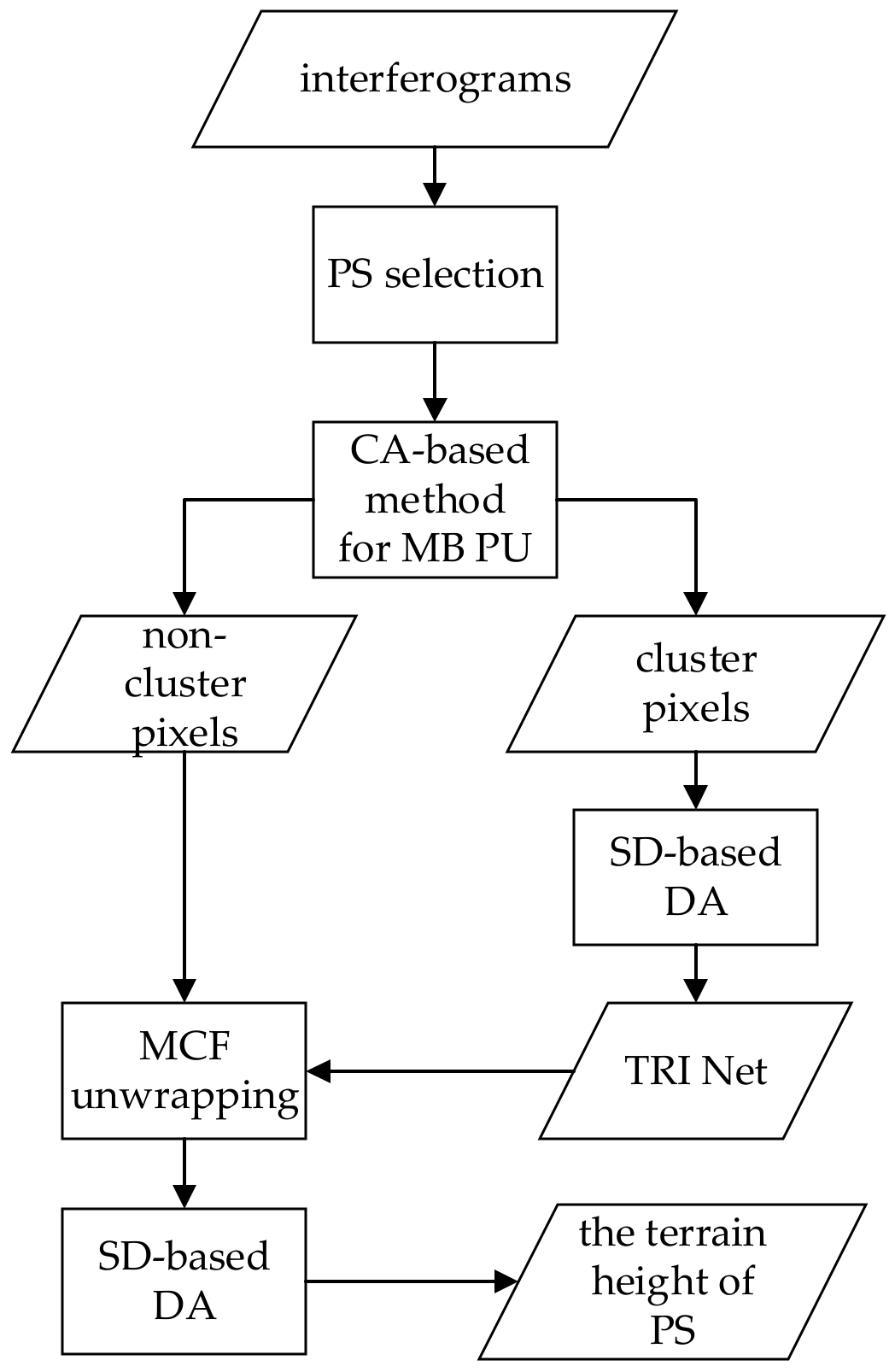
4.1. Algorithm Processing Flow
Figure 3 shows the processing flow of the improved method.
Use GB-InSAR to acquire radar images under different baselines. Take one image with zero baseline as the master image and other images as the slave images to obtain the interferograms under different baselines.
For those images acquired with zero baseline, the amplitude dispersion method is utilized to select the PSs [
18]. Then, obtain the interferometric phases of these PSs.
According to the recognizable mathematical pattern, DBSCAN can be used to cluster groups in the CA-based MB PU. The ambiguity vector corresponding to each cluster center is obtained by the search method.
Based on the CA-based MB PU, SD-based DA [
19] is utilized to filter out isolated error pixels via a statistical analysis of the neighborhood of each pixel.
Construct the Delaunay triangulation network (TRI Net) and establish the connectivity graph between any non-clustered pixel and its adjacent unwrapped cluster pixels. Then, use the MCF unwrapping method to solve each non-clustered pixel.
Utilize the SD-based DA to denoise the non-clustered pixel results. Finally, calculate the terrain height of all PSs.
4.2. Spatial-Distribution-Based Denoising Algorithm
In the ideal case, each cluster has the same ambiguity vector, but a small number of pixels will be wrongly classified into other clusters due to noise, resulting in an incorrect ambiguity vector. These error pixels are randomly distributed and commonly have a significant phase difference from neighboring pixels.
SD-based DA shows good filtering performance for isolated and discrete noisy pixels [
19]. This algorithm performs a statistical analysis of the neighborhood of each pixel and filters out pixels that do not meet the threshold. Assume that there are
pixels in total and that
represents the unwrapped phase of the
ith pixel. Firstly, search for
pixels in the nearest neighbor of the
ith pixel using Euclidean distance as a metric, and these pixels are represented as
. The mean value of the absolute value of the phase difference is expressed as:
where
represents the phase difference between the
ith pixel and its nearest neighbor. Respectively, the mean and standard deviation of
are expressed as:
Finally, set a factor . For each pixel, when , the ith pixel is considered an error pixel and is filtered out from the unwrapping result.
4.3. Non-Clustered Pixel Phase Unwrapping
Due to noise, non-clustered pixels are randomly distributed in the pixel set. The result of MB PU can be considered accurate after denoising the cluster pixels. The phases of the denoised pixels are considered as known information.
According to the co-ordinates of the clustered pixels in the SAR image, the Delaunay triangulation network can be constructed. Under the topological constraints of the triangulation network, the connectivity graph of any non-clustered pixel and its adjacent unwrapped cluster pixels can be established. Then, the absolute phase of this non-clustered pixel can be solved with the MCF phase unwrapping method.
As shown in
Figure 4, the connected graph of a non-clustered pixel includes two types.
Figure 4a shows that a non-clustered pixel shown with a blue circle is inside a triangle, where the red circles denote the clustered pixels. In this case, the non-clustered pixel is directly connected to three vertices, and three small triangles are constructed.
Figure 4b shows a non-clustered pixel that is outside the triangle. Two small triangles are constructed. It is worth noting that the shape of the triangle does not affect the accuracy of the phase unwrapping. Whether the accuracy is affected depends on whether the phase continuity assumption is satisfied between pixels. In addition, even if the unwrapping fails at this non-clustered pixel, the phase error will only be limited to this pixel and will not be propagated to other non-clustered pixels.
The following is the principle of a MCF phase unwrapping method suitable for an irregular network [
20]. Give the network
,
is the set of residual pixels and node elements are usually represented by
or
.
is the set of arcs and
represents an arc from node
to node
.
is the weight function on the arc, also known as the unit cost, and
represents the unit cost of the arc.
is the upper bound for flow, and the lower bound of flow is zero.
is the supply and demand on the node, corresponding to the residual values −1, 0, 1.
represents the supply and demand of node
. In this network, the network flow algorithm can calculate the flow
.
satisfies the following conditions:
The network
with respect to flow
is defined as
, where the definitions of
and
remain unchanged.
,
, and
are defined as follows:
From these, it can be shown that:
where
is the unbalanced number of nodes
. The initial value of
is the supply and demand
of node
. The purpose of the network flow algorithm is to construct a flow set with the smallest total cost. In
Figure 4, select one of the three cluster pixels to integrate to obtain the absolute phase of the non-clustered pixel
according to the flow
.
6. Conclusions
A CA-based MB PU transforms the phase unwrapping problem into an unsupervised learning problem. However, due to noise, pixels affected by strong noise might deviate greatly from the true cluster centers and may not be accurately clustered. Therefore, this paper proposes an improved MB PU method which combines the advantages of the CA-based MB PU and MCF methods. Under the topological constraints of the triangulation network, the connectivity graph of any non-clustered pixel and its adjacent unwrapped cluster pixels can be established. Then, the absolute phase of any non-clustered pixel can be solved with the MCF method. This improved method overcomes the limitations of the Itoh and identifies the unwrapped phases of all PSs. In addition, the SD-based DA is utilized to filter out the isolated and discrete noisy pixels to further improve the phase unwrapping accuracy.
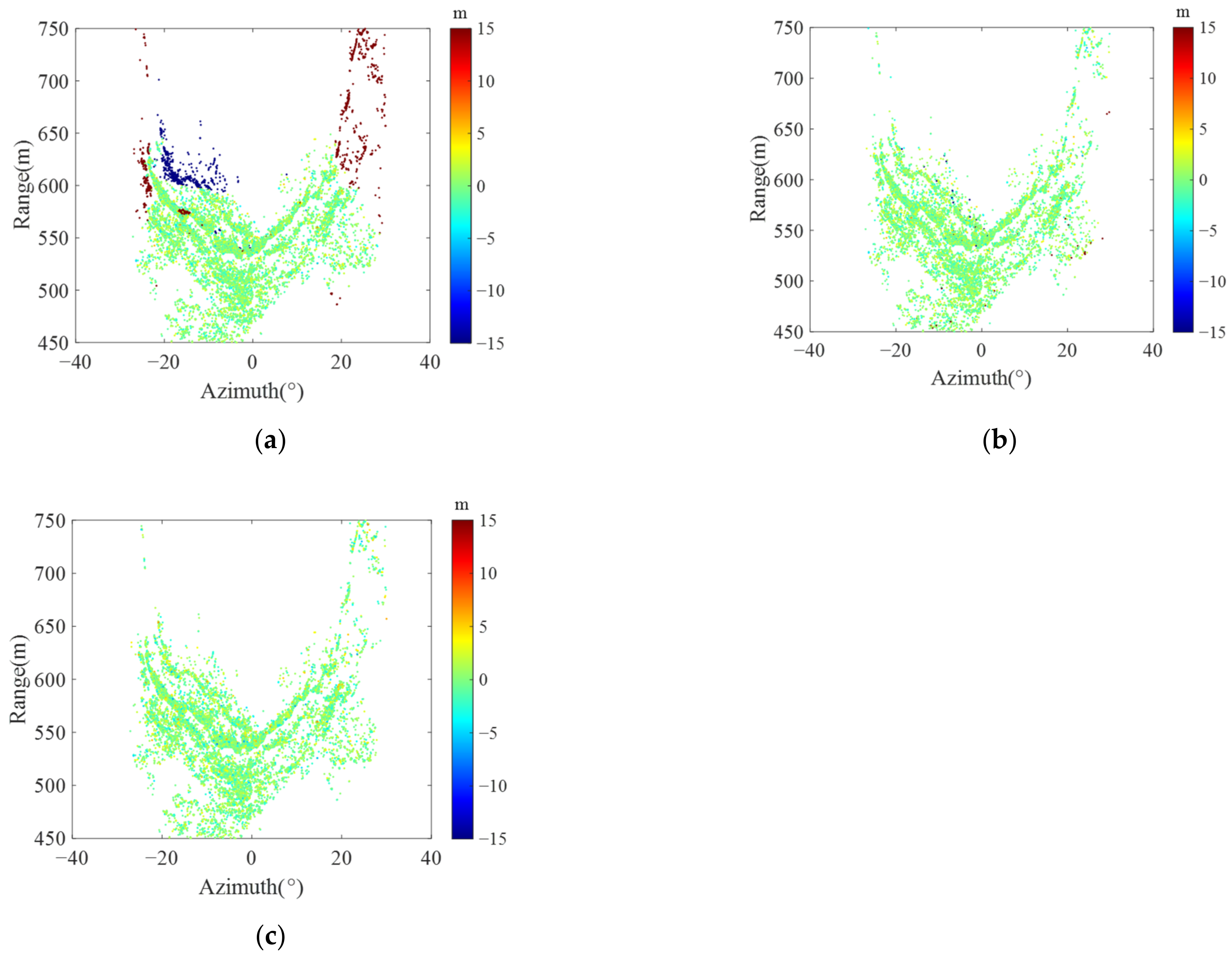
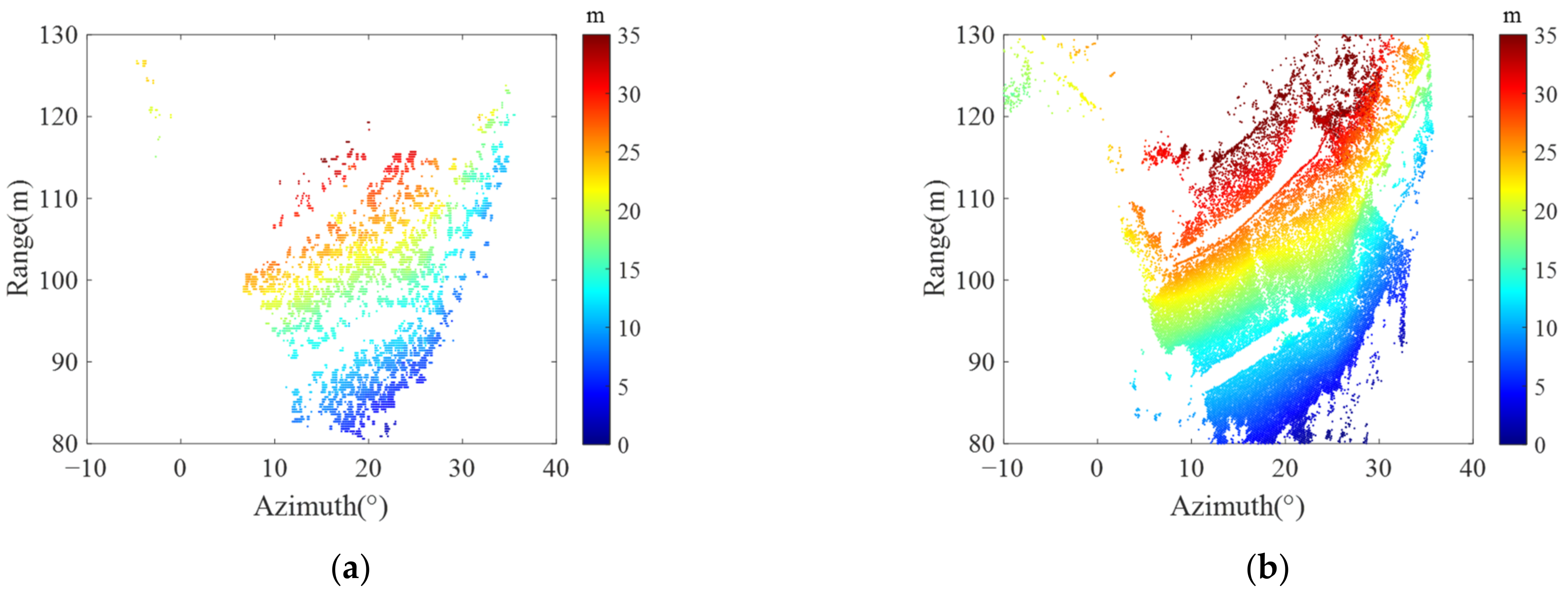
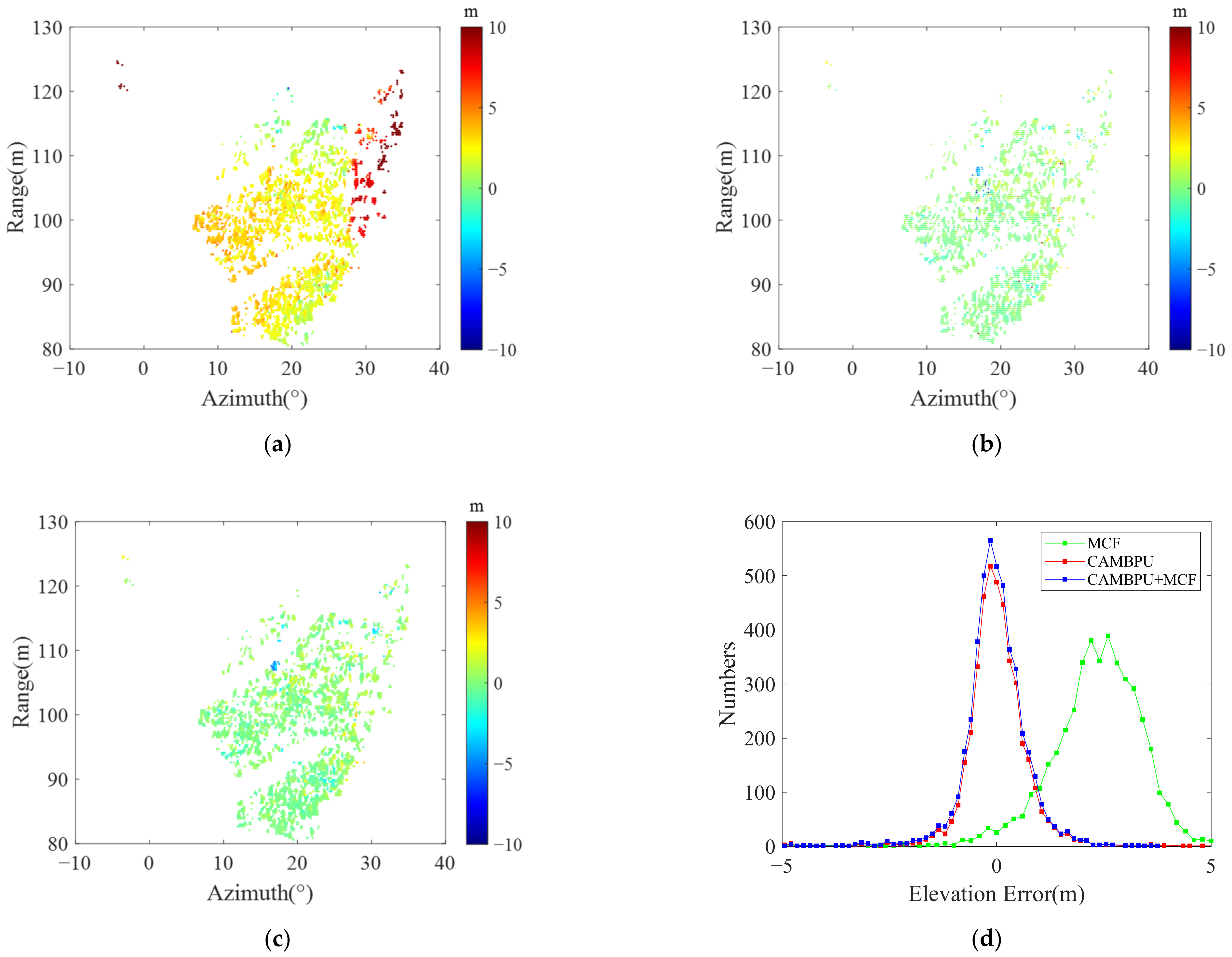
The performance of this improved method is evaluated by experiments. Compared with the DEM from LiDAR, the standard deviation of the measured elevation error is 0.7429 m, and this improved method unwraps 98.2% of the PSs with 99.01% accuracy of unwrapped PSs. Additionally, compared with the other two methods, this improved method has the smallest standard deviation. Experimental results demonstrate that this improved method is effective and quite robust to noise.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}