
Application of Convolutional Neural Networks on Digital Terrain Models for Analyzing Spatial Relations in Archaeology


Abstract
:
1. Introduction
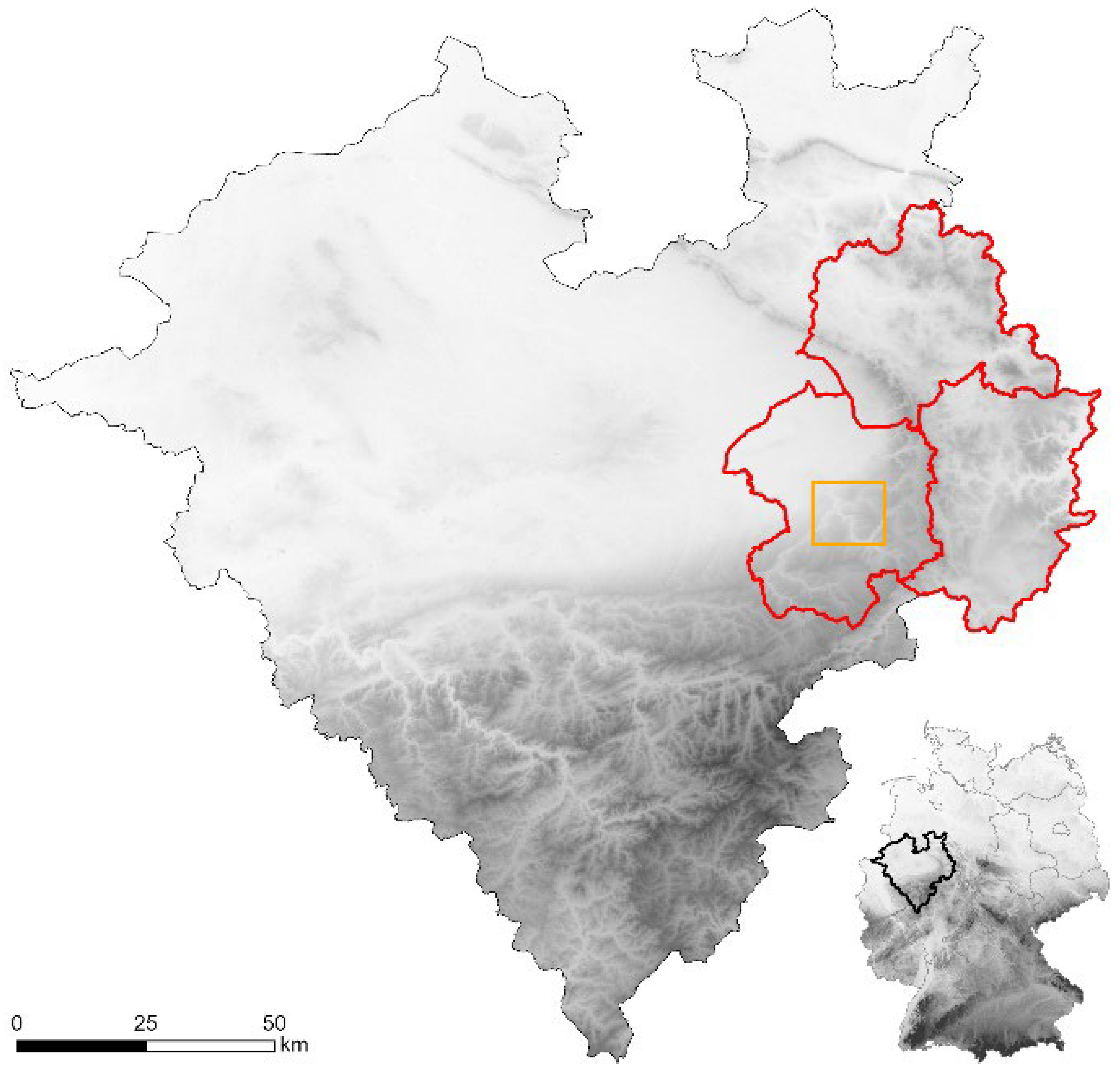
1.1. Study Area
- Hollow ways usually appear in mountainous regions as they require certain relief energy.
- Repetitive plowing levels relief features, including above-terrain monuments.
- Only regions that were populated during the Bronze and Iron Age, where most mounds in Westphalia and Lippe date to, are of interest.
- Areas with modern infrastructure are to be rejected as monuments are usually destroyed and new detections probably correspond to modern relief features.
- Forests have a relief-preserving character. Therefore, monuments are most likely to be intact.
1.2. Data
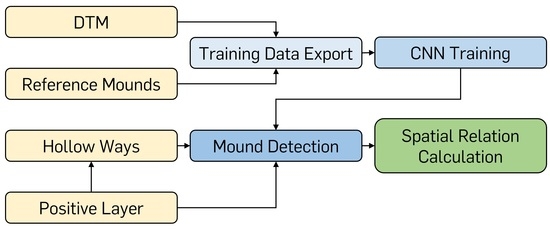
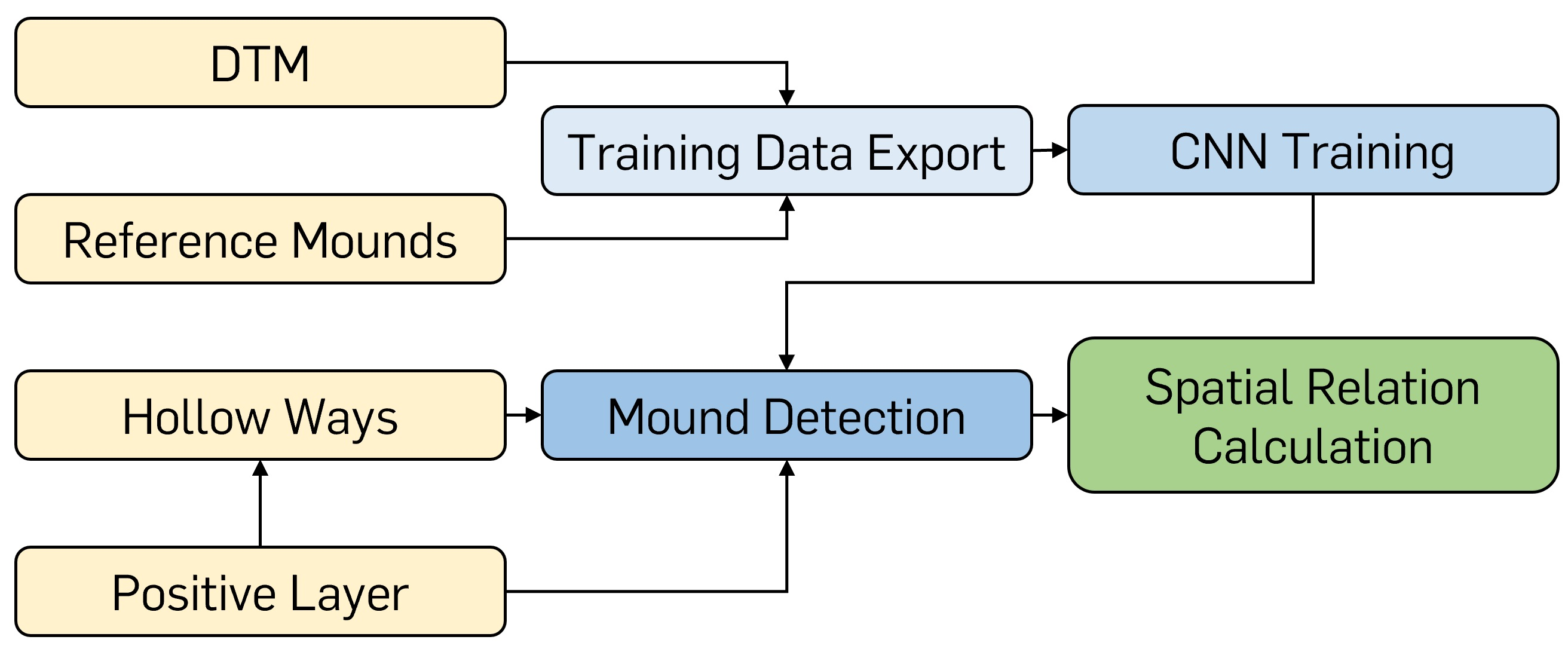
2. Methodology
- The initial DTM was smoothed using a circular filter of a 1 m radius to reduce noise.
- Sinks were removed. In slope maps, mounds and sinks look alike as slope values are not indicating upwards or downwards trends. Filling sinks should ease the training process of the CNN.
- The purged DTM was then used to calculate three visualizations that describe mounds in their respective way:
- Aspect: mounds are represented by a unique composition of all available aspects in one place, looking like an umbrella if classified conventionally in 8 cardinal directions (D8).
- Slope: mounds appear as ring-shaped slope anomalies.
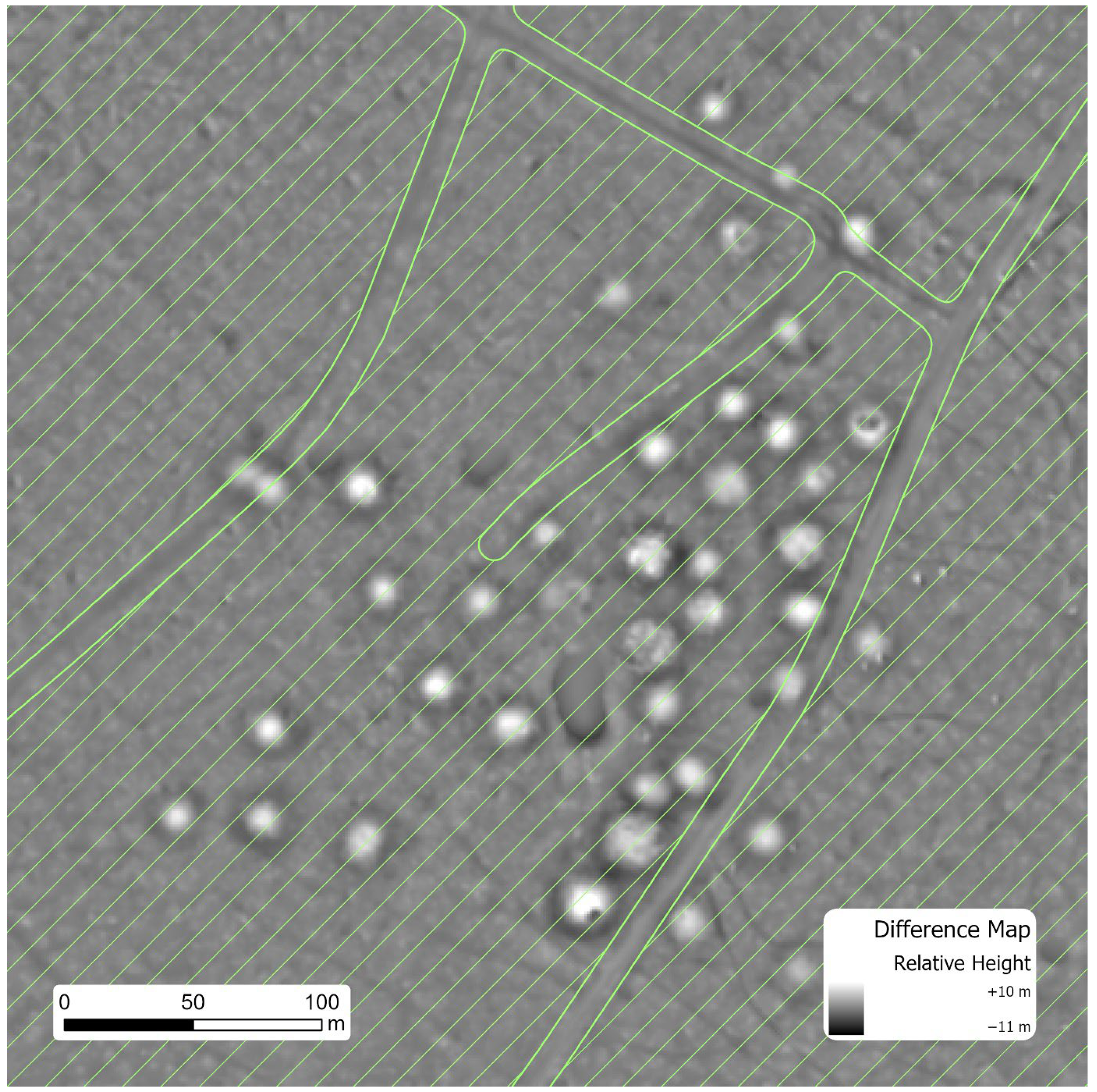
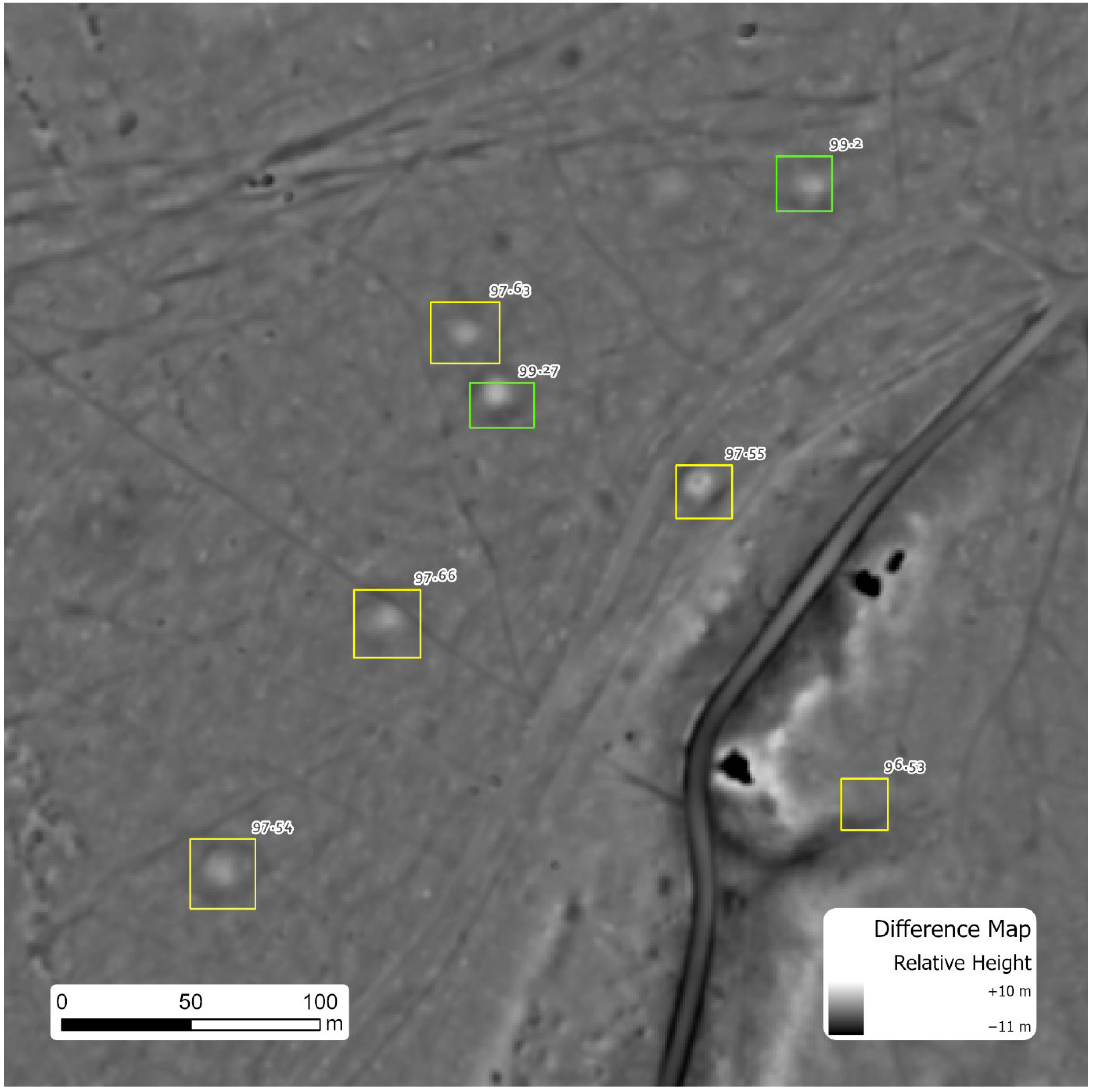
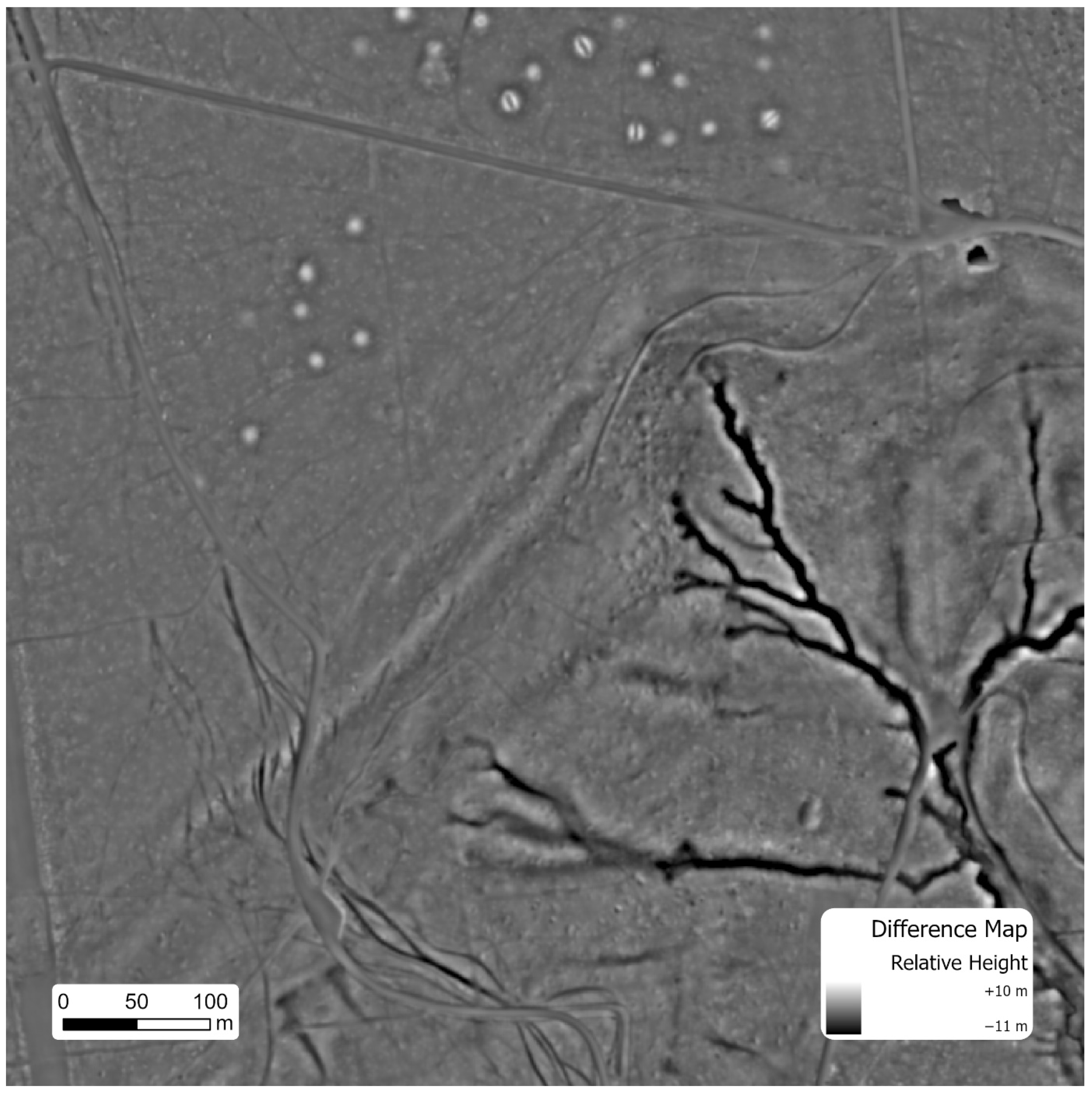
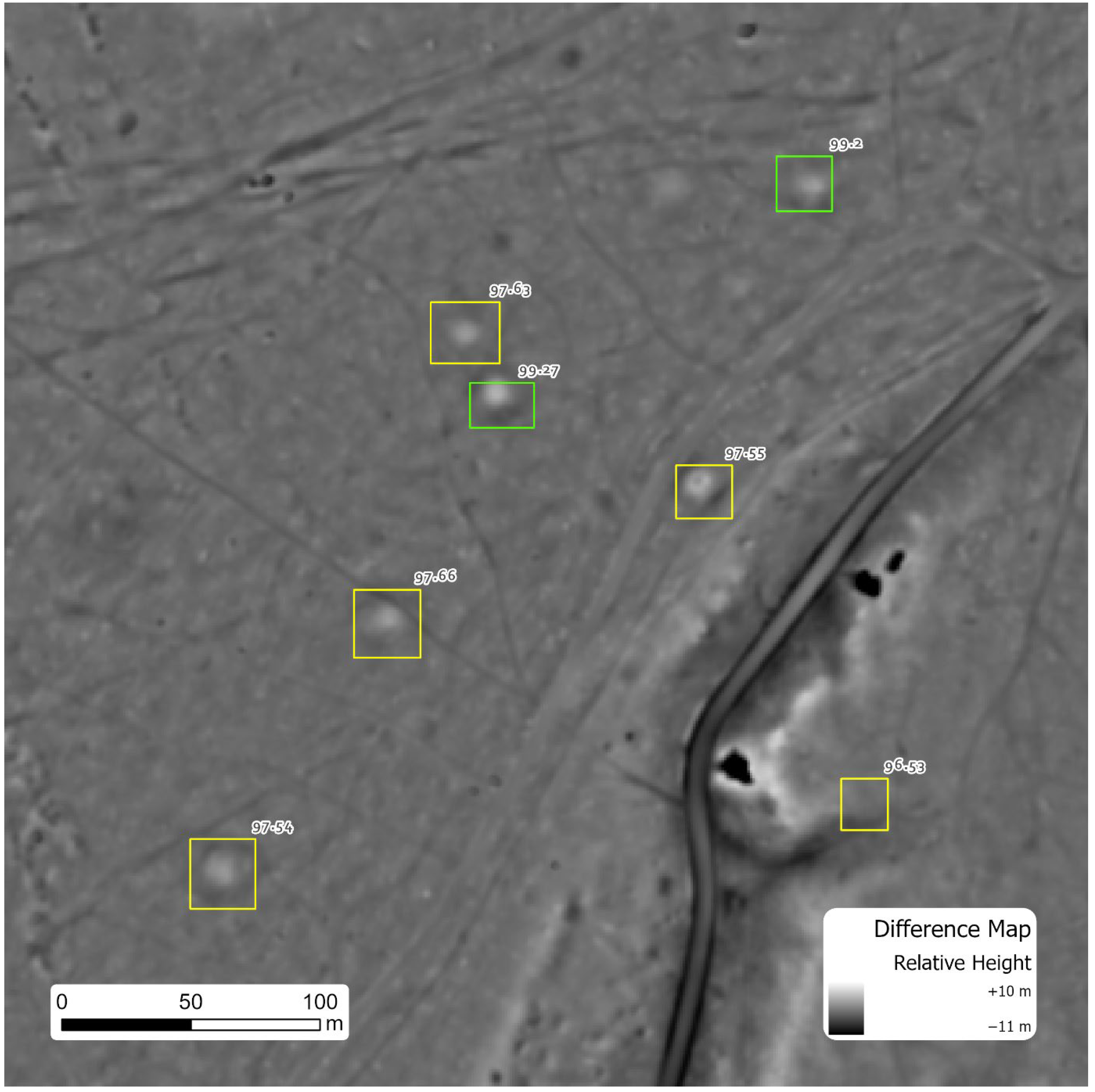
- Difference Map: mounds are described as round local maxima. It is based on trend removal using a circular filter of a radius of 10 m, which corresponds to most known burial mounds. The smoothed DTM including the macro relief was then subtracted from the initial one to extract micro relief features [30].
- These visualizations were finally composed into a 3-band DTM.
3. Results
- On the one hand, only 33% of the hollow ways are surrounded by mounds within a radius of 500 m and only 91% within 3000 m. As only very remote locations were considered and archaeological objects should still be existent, the results are probably reliant and hollow ways apparently do not necessarily have mounds around, especially considering that those in a distance of 3000 m are rather unlikely to relate to the observed hollow way. An alternative interpretation is that these hollow ways do not date to an epoch in which burial mounds were built but are younger (Table 1).
- On the other hand, already 72% of the hollow ways have mounds within a distance of 1500 m and 84% within 2000 m. Taking the strict parameters of the (post) classification and weaknesses of the CNN into account, the percentage might actually be higher, which would rather confirm a positive spatial relation. Within this distance, hollow ways are surrounded by two mounds on average (Table 1).
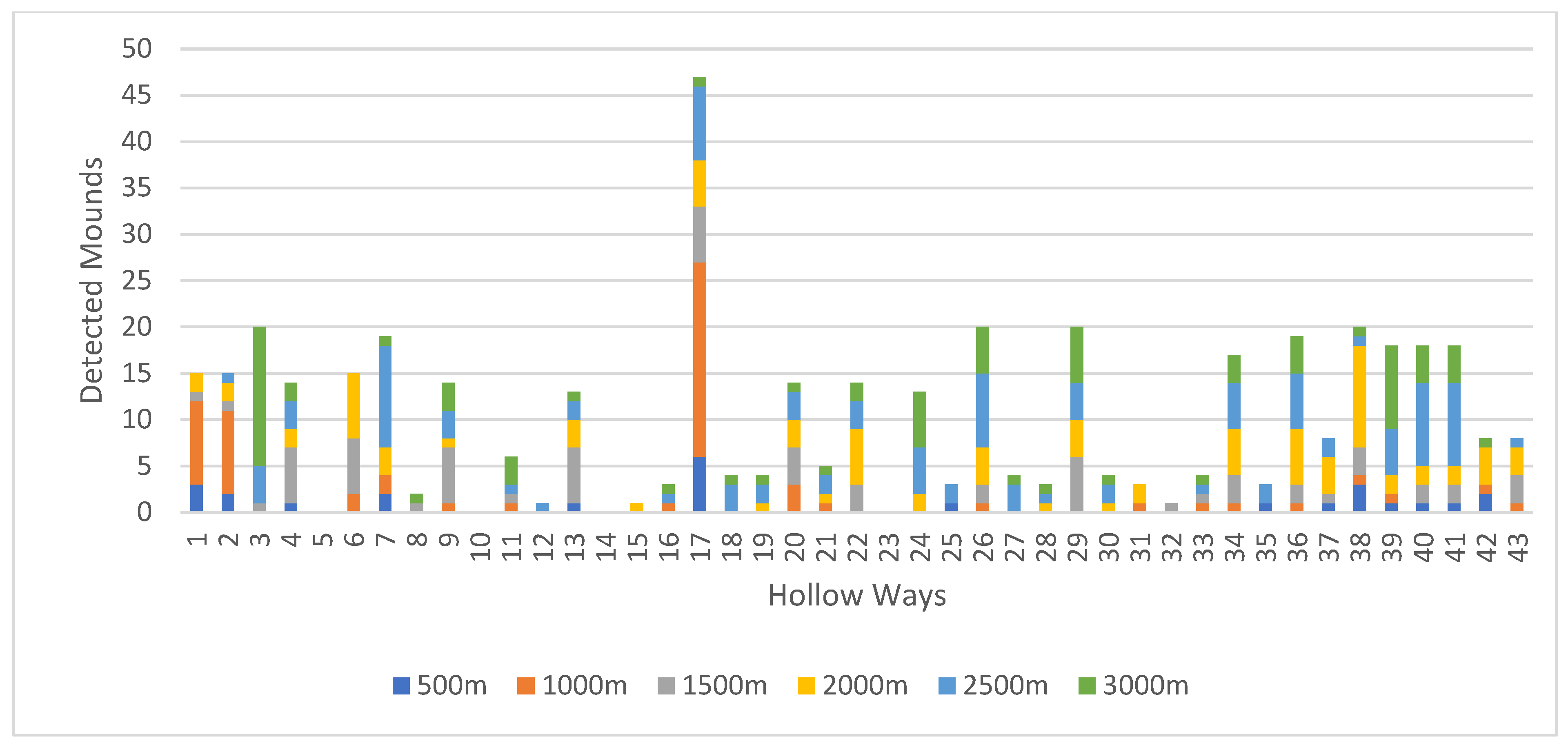
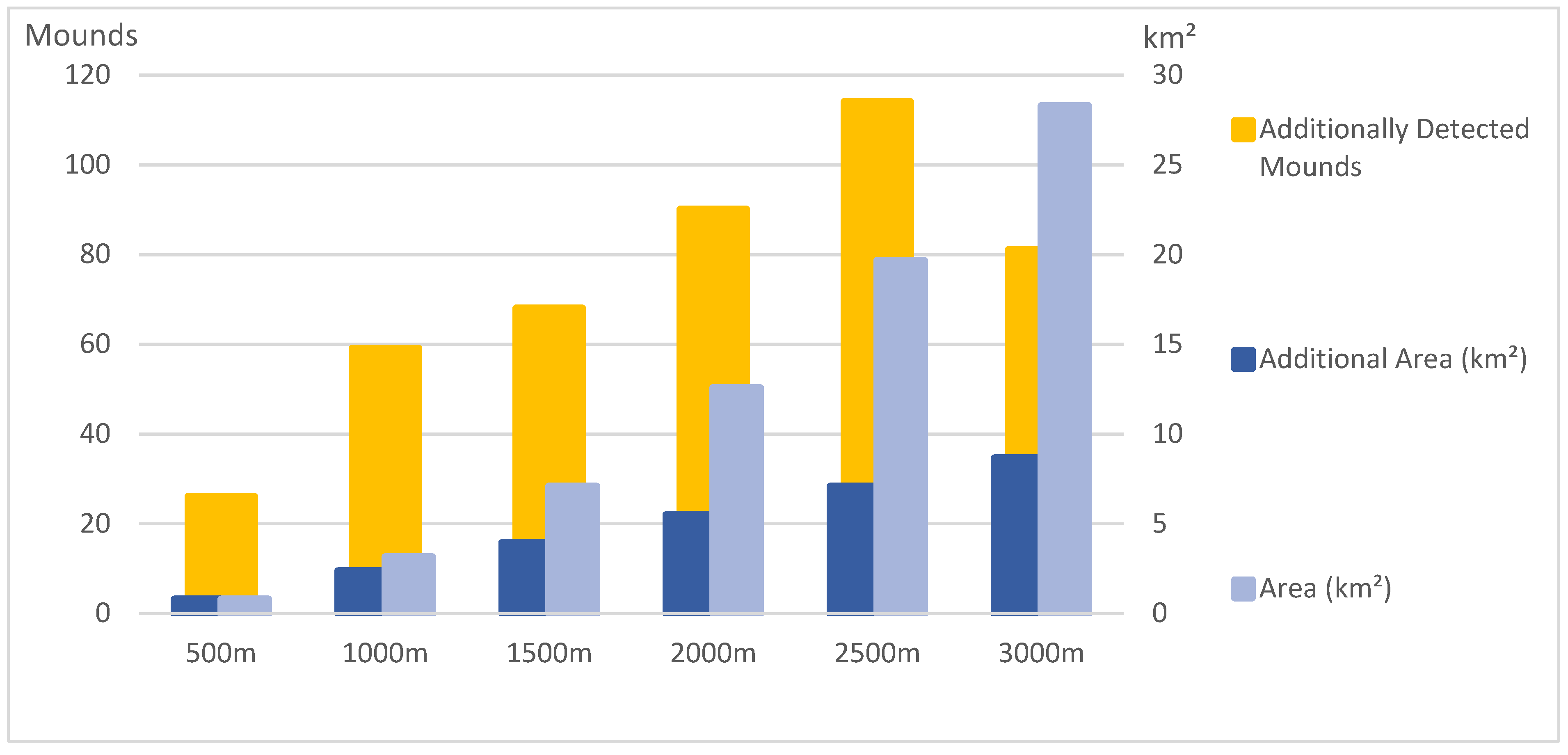
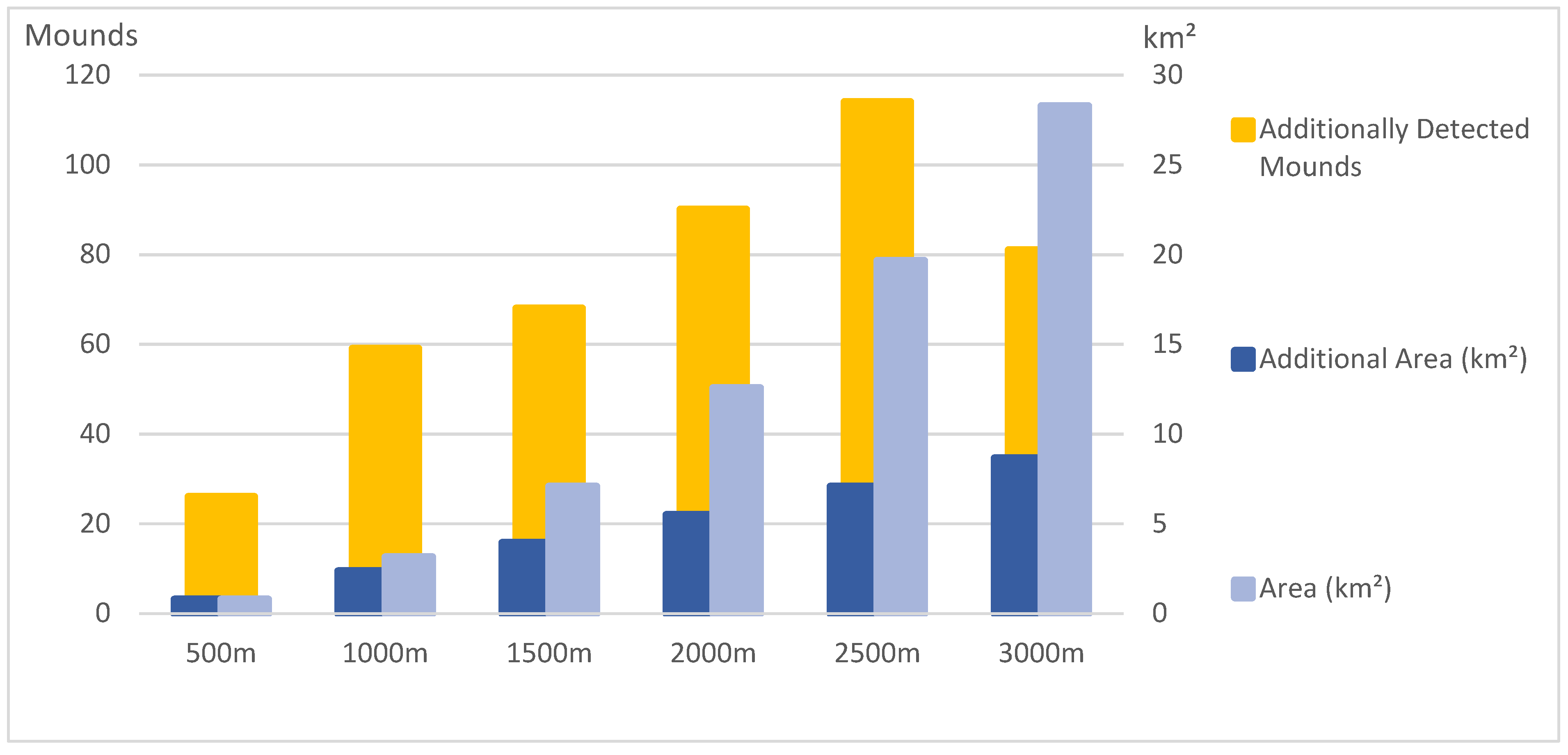
- Corresponding to the basic geographical convention that objects are more related to each other, the closer they are located to one another, the area of investigation around each hollow way should be limited. Furthermore, detections of even larger areas than here require above-average computing resources. As for this study no limit is predefined by archaeological aspects such as visibility or soil type, it is interesting if a meaningful limit can be derived from the data itself.In general, the absolute number of detected mounds increases along with the size of the area around each hollow way. However, the additional (ring-shaped) area compared to the next smaller one also increases due to growing diameters. Thus, the number of additionally detected mounds must also increase to justify larger areas. As long as this is true, increasing the observed area is reasonable. If not, the sweet spot is achieved. Beyond this point, the classification will possibly suffer from including unnecessarily large areas without generating suitable amounts of results and the workflow will become inefficient and unreliable. Here, this is the case at 2500 m as additional detections significantly drop afterward (Figure 13). In some cases, this distance represents the end of forests, which would explain less detections.
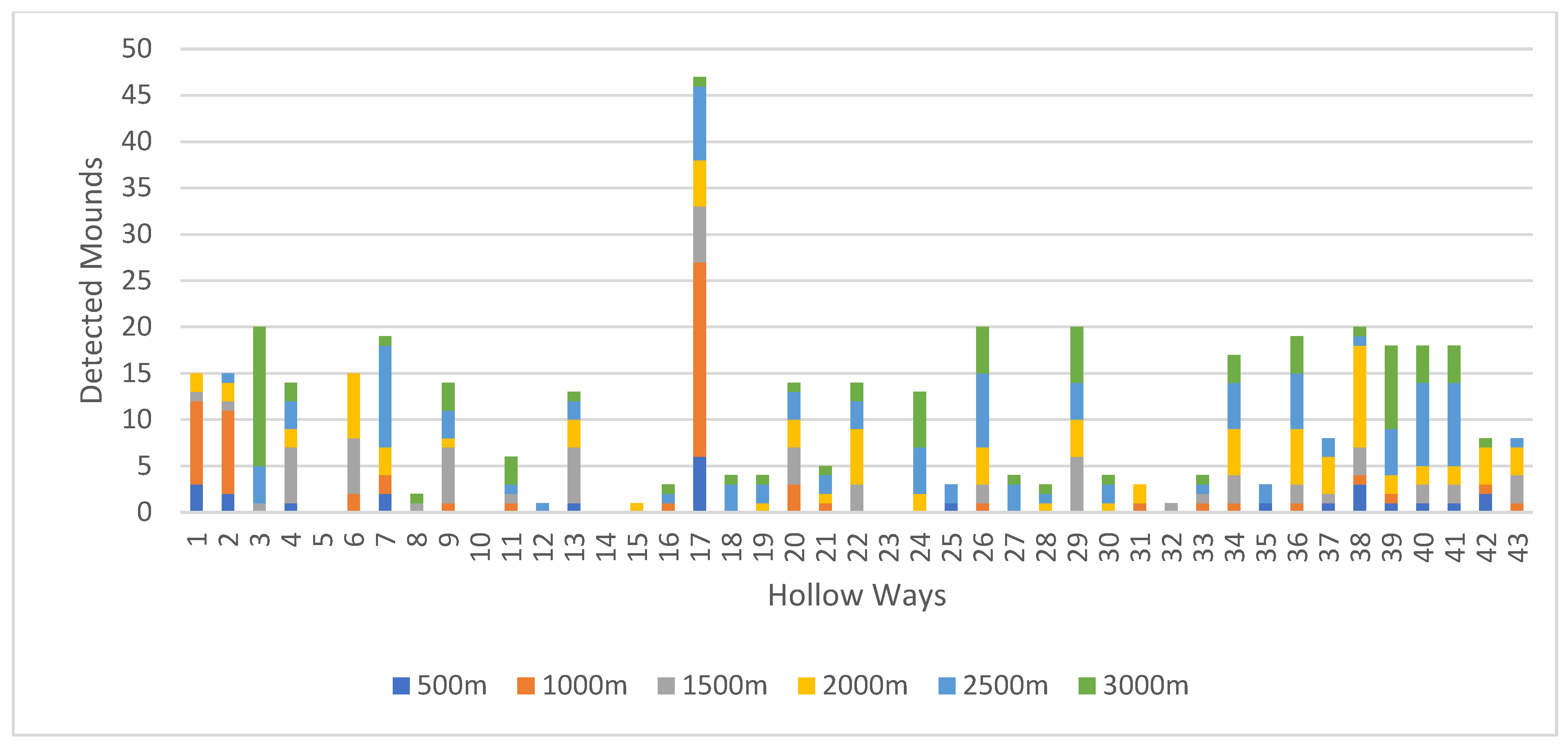
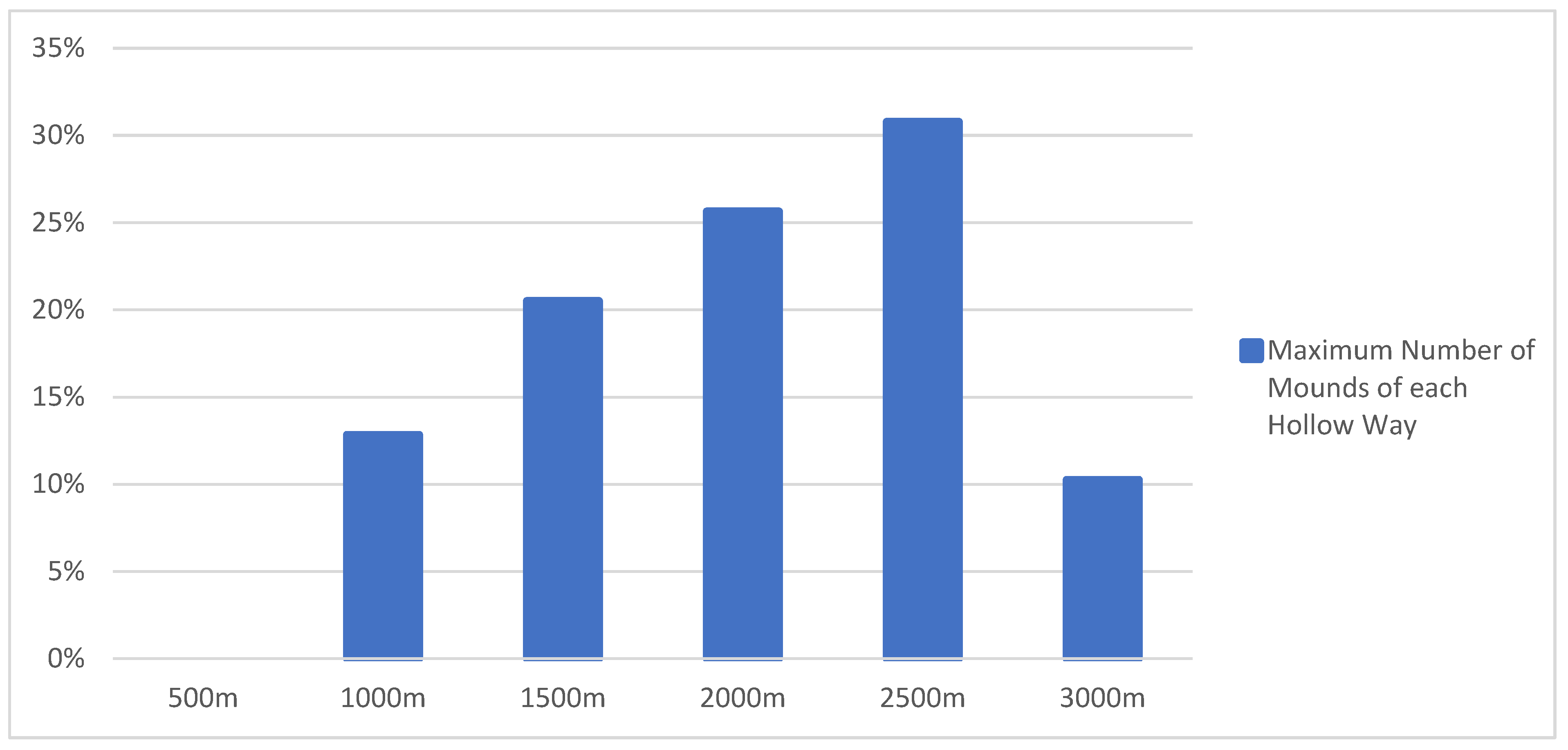
- Analyzing detected mounds around hollow ways as a whole is potentially affected by single hollow ways with large numbers of detections (such as No.17, Table 1). However, considering detected mounds per hollow way allows the same conclusion. No hollow way has its maximum number of mounds within 500 m. For most hollow ways (31%), the area including most mounds is from 2000–2500 m radius, followed by 1500–2000 m (26%) (Figure 14).
- The percentage of hollow ways with a least one mound confirms this as well, as beyond 2500 m, no additional hollow ways appear (91%). In other words: No hollow way has its closest mound within a distance of 2500 m or more (Table 1).
4. Conclusions
5. Discussion and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Roalkvam, I. Algorithmic Classification and Statistical Modelling of Coastal Settlement Patterns in Mesolithic South-Eastern Norway. J. Comput. Appl. Archaeol. 2020, 3, 288–307. [Google Scholar] [CrossRef]
- Volkmann, A. Climate change, environment and migration: A GIS-based study of the Roman Iron Age to the Early Middle Ages in the river Oder region. Post-Class. Archaeol. 2015, 5, 69–94. [Google Scholar]
- Vletter, W.F.; van Lanen, R.J. Finding Vanished Routes: Applying a Multi-modelling Approach on Lost Route and Path Networks in the Veluwe Region, the Netherlands. Rural Landsc. 2018, 5, 2. [Google Scholar] [CrossRef] [Green Version]
- Field, S.; Heitman, C.; Richards-Rissetto, H. A Least Cost Analysis: Correlative Modeling of the Chaco Regional Road System. J. Comput. Appl. Archaeol. 2019, 2, 136–150. [Google Scholar] [CrossRef]
- Schmidt, J.; Werther, L.; Zielhofer, C. Shaping pre-modern digital terrain models: The former topography at Charlemagne’s canal construction site. PLoS ONE 2018, 13, e0200167. [Google Scholar] [CrossRef] [PubMed]
- Knoche, B. Riten, Routen, Rinder. Das jungneolithische Erdwerk von Soest im Wegenetz eines extensiven Viehwirtschaftssystems. In Neue Forschungen zum Neolithikum in Soest und am Hellweg; Melzer, W., Ed.; Westfälische Verl.-Buchh. Mocker & Jahn: Soest, Germany, 2013; pp. 119–274. ISBN 978-3-87902-312-7. [Google Scholar]
- Schierhold, K.; Pfeffer, I. Wegeforschung 2.0 oder die Entdeckung einer alten Wegetrasse bei Lotte-Wersen. In Archäologie in Westfalen-Lippe 2014; LWL-Archäologie für Westfalen, Altertumskommission für Westfalen, Eds.; Beier & Beran: Langenweißbach, Germany, 2015; pp. 230–232. ISBN 978-3-95741-040-5. [Google Scholar]
- de Boer, A. Using pattern recognition to search LIDAR data for archeological sites. In The World Is in Your Eyes. CAA2005, Proceedings of the 33rd Computer Applications and Quantitative Methods in Archaeology Conference, Tomar, Portugal, March 2005; Figueiredo, A., Leite Velho, G., Eds.; CAA: Tomar, Portugal, 2007; pp. 245–254. [Google Scholar]
- Schneider, A.; Takla, M.; Nicolay, A.; Raab, A.; Raab, T. A Template-matching Approach Combining Morphometric Variables for Automated Mapping of Charcoal Kiln Sites. Archaeol. Prospect. 2015, 22, 45–62. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Zortea, M.; Tonning, C. Automatic detection of mound structures in airborne laser scanning data. J. Archaeol. Sci. Rep. 2015, 2, 69–79. [Google Scholar] [CrossRef]
- Freeland, T.; Heung, B.; Burley, D.V.; Clark, G.; Knudby, A. Automated feature extraction for prospection and analysis of monumental earthworks from aerial LiDAR in the Kingdom of Tonga. J. Archaeol. Sci. 2016, 69, 64–74. [Google Scholar] [CrossRef]
- Cerrillo-Cuenca, E. An approach to the automatic surveying of prehistoric barrows through LiDAR. Quat. Int. 2017, 435, 135–145. [Google Scholar] [CrossRef]
- Sevara, C.; Pregesbauer, M.; Doneus, M.; Verhoeven, G.; Trinks, I. Pixel versus object—A comparison of strategies for the semi-automated mapping of archaeological features using airborne laser scanning data. J. Archaeol. Sci. Rep. 2016, 5, 485–498. [Google Scholar] [CrossRef]
- Meyer, M.F.; Pfeffer, I.; Jürgens, C. Automated Detection of Field Monuments in Digital Terrain Models of Westphalia Using OBIA. Geosciences 2019, 9, 109. [Google Scholar] [CrossRef] [Green Version]
- Bonhage, A.; Eltaher, M.; Raab, T.; Breuß, M.; Raab, A.; Schneider, A. A modified Mask region-based convolutional neural network approach for the automated detection of archaeological sites on high-resolution light detection and ranging-derived digital elevation models in the North German Lowland. Archaeol. Prospect. 2021, 28, 177–186. [Google Scholar] [CrossRef]
- Zingman, I.; Saupe, D.; Penatti, O.A.B.; Lambers, K. Detection of Fragmented Rectangular Enclosures in Very High Resolution Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4580–4593. [Google Scholar] [CrossRef]
- Davis, D.S.; Caspari, G.; Lipo, C.P.; Sanger, M.C. Deep learning reveals extent of Archaic Native American shell-ring building practices. J. Archaeol. Sci. 2021, 132, 105433. [Google Scholar] [CrossRef]
- Davis, D.S.; Lundin, J. Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning. Remote Sens. 2021, 13, 3680. [Google Scholar] [CrossRef]
- Salberg, A.-B.; Trier, Ø.D.; Kampffmeyer, M. Large-Scale Mapping of Small Roads in Lidar Images Using Deep Convolutional Neural Networks. In Image Analysis; Sharma, P., Bianchi, F.M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 193–204. ISBN 978-3-319-59128-5. [Google Scholar]
- Verschoof-van der Vaart, W.B.; Lambers, K. Applying automated object detection in archaeological practice: A case study from the southern Netherlands. Archaeol. Prospect. 2021, 29, 15–31. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using deep neural networks on airborne laser scanning data: Results from a case study of semi-automatic mapping of archaeological topography on Arran, Scotland. Archaeol. Prospect. 2019, 26, 165–175. [Google Scholar] [CrossRef]
- Caspari, G.; Crespo, P. Convolutional neural networks for archaeological site detection—Finding “princely” tombs. J. Archaeol. Sci. 2019, 110, 104998. [Google Scholar] [CrossRef]
- Klinke, L.; Pfeffer, I. Kontinuität zahlt sich aus—Zum Fortgang der ALS-Prospektion in Westfalen-Lippe. In Archäologie in Westfalen-Lippe 2017; LWL-Archäologie für Westfalen, Altertumskommission für Westfalen, Eds.; Beier & Beran: Langenweißbach, Germany, 2018; pp. 259–261. ISBN 978-3-95741-096-2. [Google Scholar]
- Bergmann, R. Wüstungen im Kreis Höxter: Die Ergebnisse der Untersuchungen 2015. In Archäologie in Westfalen-Lippe 2015; LWL-Archäologie für Westfalen, Altertumskommission für Westfalen, Eds.; Beier & Beran: Langenweißbach, Germany, 2016; pp. 231–237. ISBN 978-3-95741-052-8. [Google Scholar]
- Bezirksregierung Köln. Open Data—Digitale Geobasisdaten NRW. Data Licence Germany: dl-de/by-2-0. Available online: https://www.bezreg-koeln.nrw.de/brk_internet/geobasis/opendata/index.html (accessed on 21 December 2021).
- Deiters, S. Was passierte wann? Einführung in die Frühe, Mittlere und Späte Bronzezeit. In Westfalen in der Bronzezeit; Bérenger, D.J., Grünewald, C., Eds.; Landschaftsverband Westfalen-Lippe: Münster, Germany, 2008; pp. 46–53. ISBN 978-3-8053-3932-2. [Google Scholar]
- NASA. SRTM (Shuttle Radar Topography Mission). Available online: https://www2.jpl.nasa.gov/srtm/ (accessed on 11 September 2019).
- Verschoof-van der Vaart, W.B.; Lambers, K.; Kowalczyk, W.; Bourgeois, Q.P. Combining Deep Learning and Location-Based Ranking for Large-Scale Archaeological Prospection of LiDAR Data from The Netherlands. ISPRS Int. J. Geo-Inf. 2020, 9, 293. [Google Scholar] [CrossRef]
- Meyer-Heß, M.F. Identification of Archaeologically Relevant Areas Using Open Geodata. KN J. Cartogr. Geogr. Inf. 2020, 70, 107–125. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models—A new tool for archaeological prospection. Archaeol. Prospect. 2010, 79, 67–72. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Remoteness (%) | Total Number of Detected Mounds | Mounds Per Zone | Zone of the Maximum Number of Mounds (x) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. | 500 m | 1000 m | 1500 m | 2000 m | 2500 m | 3000 m | 500 m | 1000 m | 1500 m | 2000 m | 2500 m | 3000 m | 500 m | 1000 m | 1500 m | 2000 m | 2500 m | 3000 m | |
| 1 | 98 | 3 | 12 | 13 | 15 | 15 | 15 | 3 | 9 | 1 | 2 | 0 | 0 | 🗶 | |||||
| 2 | 96 | 2 | 11 | 12 | 14 | 15 | 15 | 2 | 9 | 1 | 2 | 1 | 0 | 🗶 | |||||
| 3 | 95 | 0 | 0 | 1 | 1 | 5 | 20 | 0 | 0 | 1 | 0 | 4 | 15 | 🗶 | |||||
| 4 | 95 | 1 | 1 | 7 | 9 | 12 | 14 | 1 | 0 | 6 | 2 | 3 | 2 | 🗶 | |||||
| 5 | 94 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
| 6 | 94 | 0 | 2 | 8 | 15 | 15 | 15 | 0 | 2 | 6 | 7 | 0 | 0 | 🗶 | |||||
| 7 | 94 | 2 | 4 | 4 | 7 | 18 | 19 | 2 | 2 | 0 | 3 | 11 | 1 | 🗶 | |||||
| 8 | 94 | 0 | 0 | 1 | 1 | 1 | 2 | 0 | 0 | 1 | 0 | 0 | 1 | 🗶 | |||||
| 9 | 93 | 0 | 1 | 7 | 8 | 11 | 14 | 0 | 1 | 6 | 1 | 3 | 3 | 🗶 | |||||
| 10 | 93 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
| 11 | 93 | 0 | 1 | 2 | 2 | 3 | 6 | 0 | 1 | 1 | 0 | 1 | 3 | 🗶 | |||||
| 12 | 93 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 🗶 | |||||
| 13 | 93 | 1 | 1 | 7 | 10 | 12 | 13 | 1 | 0 | 6 | 3 | 2 | 1 | 🗶 | |||||
| 14 | 93 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
| 15 | 93 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 🗶 | |||||
| 16 | 93 | 0 | 1 | 1 | 1 | 2 | 3 | 0 | 1 | 0 | 0 | 1 | 1 | 🗶 | |||||
| 17 | 93 | 6 | 27 | 33 | 38 | 46 | 47 | 6 | 21 | 6 | 5 | 8 | 1 | 🗶 | |||||
| 18 | 93 | 0 | 0 | 0 | 0 | 3 | 4 | 0 | 0 | 0 | 0 | 3 | 1 | 🗶 | |||||
| 19 | 92 | 0 | 0 | 0 | 1 | 3 | 4 | 0 | 0 | 0 | 1 | 2 | 1 | 🗶 | |||||
| 20 | 92 | 0 | 3 | 7 | 10 | 13 | 14 | 0 | 3 | 4 | 3 | 3 | 1 | 🗶 | |||||
| 21 | 92 | 0 | 1 | 1 | 2 | 4 | 5 | 0 | 1 | 0 | 1 | 2 | 1 | 🗶 | |||||
| 22 | 92 | 0 | 0 | 3 | 9 | 12 | 14 | 0 | 0 | 3 | 6 | 3 | 2 | 🗶 | |||||
| 23 | 92 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||
| 24 | 92 | 0 | 0 | 0 | 2 | 7 | 13 | 0 | 0 | 0 | 2 | 5 | 6 | 🗶 | |||||
| 25 | 92 | 1 | 1 | 1 | 1 | 3 | 3 | 1 | 0 | 0 | 0 | 2 | 0 | 🗶 | |||||
| 26 | 92 | 0 | 1 | 3 | 7 | 15 | 20 | 0 | 1 | 2 | 4 | 8 | 5 | 🗶 | |||||
| 27 | 91 | 0 | 0 | 0 | 0 | 3 | 4 | 0 | 0 | 0 | 0 | 3 | 1 | 🗶 | |||||
| 28 | 91 | 0 | 0 | 0 | 1 | 2 | 3 | 0 | 0 | 0 | 1 | 1 | 1 | 🗶 | |||||
| 29 | 91 | 0 | 0 | 6 | 10 | 14 | 20 | 0 | 0 | 6 | 4 | 4 | 6 | 🗶 | |||||
| 30 | 91 | 0 | 0 | 0 | 1 | 3 | 4 | 0 | 0 | 0 | 1 | 2 | 1 | 🗶 | |||||
| 31 | 91 | 0 | 1 | 1 | 3 | 3 | 3 | 0 | 1 | 0 | 2 | 0 | 0 | 🗶 | |||||
| 32 | 91 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 🗶 | |||||
| 33 | 91 | 0 | 1 | 2 | 2 | 3 | 4 | 0 | 1 | 1 | 0 | 1 | 1 | 🗶 | |||||
| 34 | 91 | 0 | 1 | 4 | 9 | 14 | 17 | 0 | 1 | 3 | 5 | 5 | 3 | 🗶 | |||||
| 35 | 91 | 1 | 1 | 1 | 1 | 3 | 3 | 1 | 0 | 0 | 0 | 2 | 0 | 🗶 | |||||
| 36 | 90 | 0 | 1 | 3 | 9 | 15 | 19 | 0 | 1 | 2 | 6 | 6 | 4 | 🗶 | |||||
| 37 | 90 | 1 | 1 | 2 | 6 | 8 | 8 | 1 | 0 | 1 | 4 | 2 | 0 | 🗶 | |||||
| 38 | 90 | 3 | 4 | 7 | 18 | 19 | 20 | 3 | 1 | 3 | 11 | 1 | 1 | 🗶 | |||||
| 39 | 90 | 1 | 2 | 2 | 4 | 9 | 18 | 1 | 1 | 0 | 2 | 5 | 9 | 🗶 | |||||
| 40 | 90 | 1 | 1 | 3 | 5 | 14 | 18 | 1 | 0 | 2 | 2 | 9 | 4 | 🗶 | |||||
| 41 | 90 | 1 | 1 | 3 | 5 | 14 | 18 | 1 | 0 | 2 | 2 | 9 | 4 | 🗶 | |||||
| 42 | 90 | 2 | 3 | 3 | 7 | 7 | 8 | 2 | 1 | 0 | 4 | 0 | 1 | 🗶 | |||||
| 43 | 90 | 0 | 1 | 4 | 7 | 8 | 8 | 0 | 1 | 3 | 3 | 1 | 0 | 🗶 | |||||
| Sum | 26 | 85 | 153 | 243 | 357 | 438 | 26 | 59 | 68 | 90 | 114 | 81 | 0 | 5 | 8 | 10 | 12 | 4 | |
| Mean | 0.6 | 2 | 3.6 | 5.7 | 8.3 | 10.2 | 0.6 | 1.4 | 1.6 | 2.1 | 2.7 | 1.9 | 0% | 13% | 21% | 26% | 31% | 10% | |
| % >0 | 33 | 60 | 72 | 84 | 91 | 91 | 33 | 44 | 53 | 65 | 74 | 65 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meyer-Heß, M.F.; Pfeffer, I.; Juergens, C. Application of Convolutional Neural Networks on Digital Terrain Models for Analyzing Spatial Relations in Archaeology. Remote Sens. 2022, 14, 2535. https://doi.org/10.3390/rs14112535
Meyer-Heß MF, Pfeffer I, Juergens C. Application of Convolutional Neural Networks on Digital Terrain Models for Analyzing Spatial Relations in Archaeology. Remote Sensing. 2022; 14(11):2535. https://doi.org/10.3390/rs14112535
Chicago/Turabian StyleMeyer-Heß, M. Fabian, Ingo Pfeffer, and Carsten Juergens. 2022. "Application of Convolutional Neural Networks on Digital Terrain Models for Analyzing Spatial Relations in Archaeology" Remote Sensing 14, no. 11: 2535. https://doi.org/10.3390/rs14112535
APA StyleMeyer-Heß, M. F., Pfeffer, I., & Juergens, C. (2022). Application of Convolutional Neural Networks on Digital Terrain Models for Analyzing Spatial Relations in Archaeology. Remote Sensing, 14(11), 2535. https://doi.org/10.3390/rs14112535