
Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring


Abstract
:
1. Introduction
2. Materials and Methods
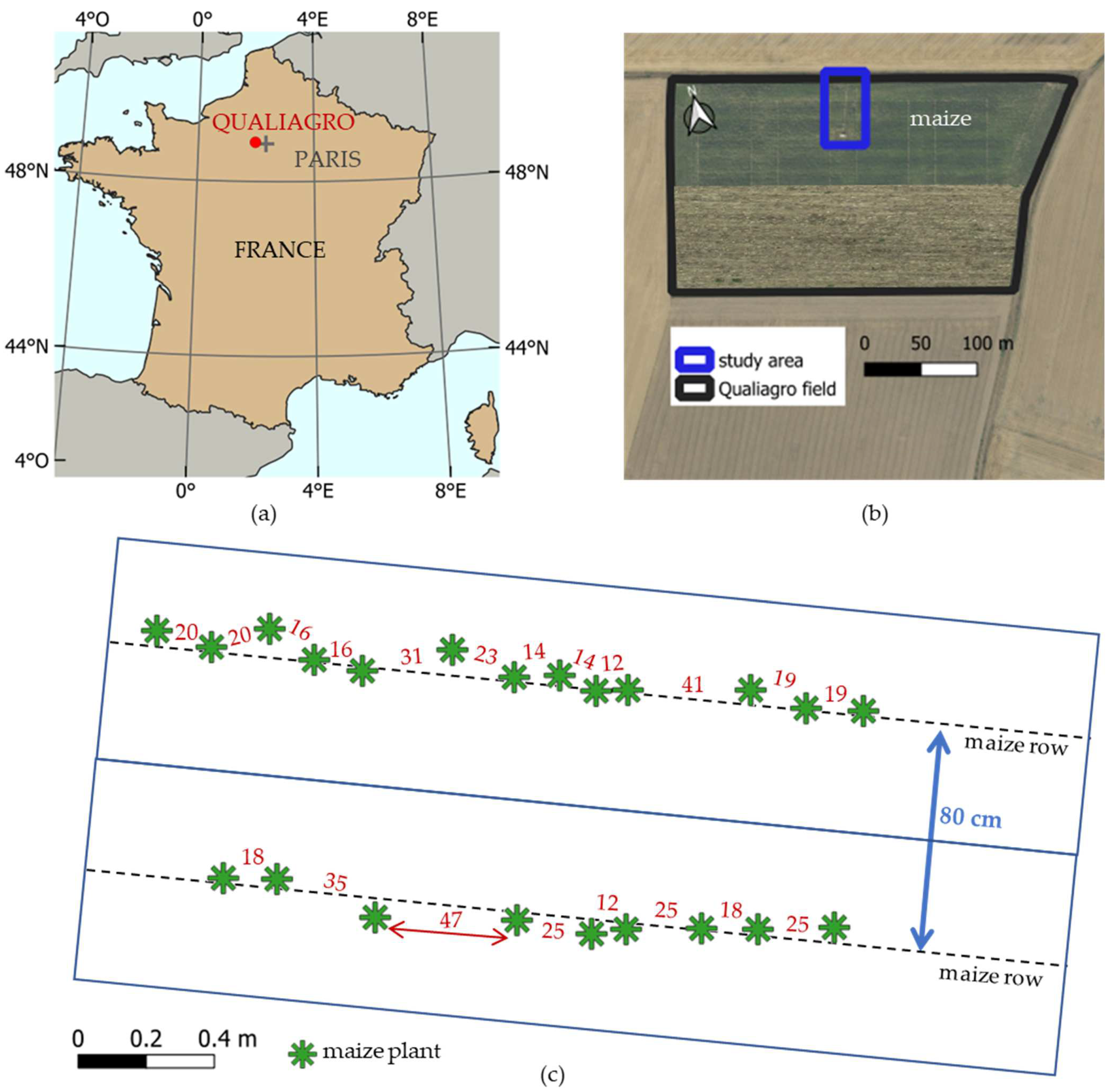
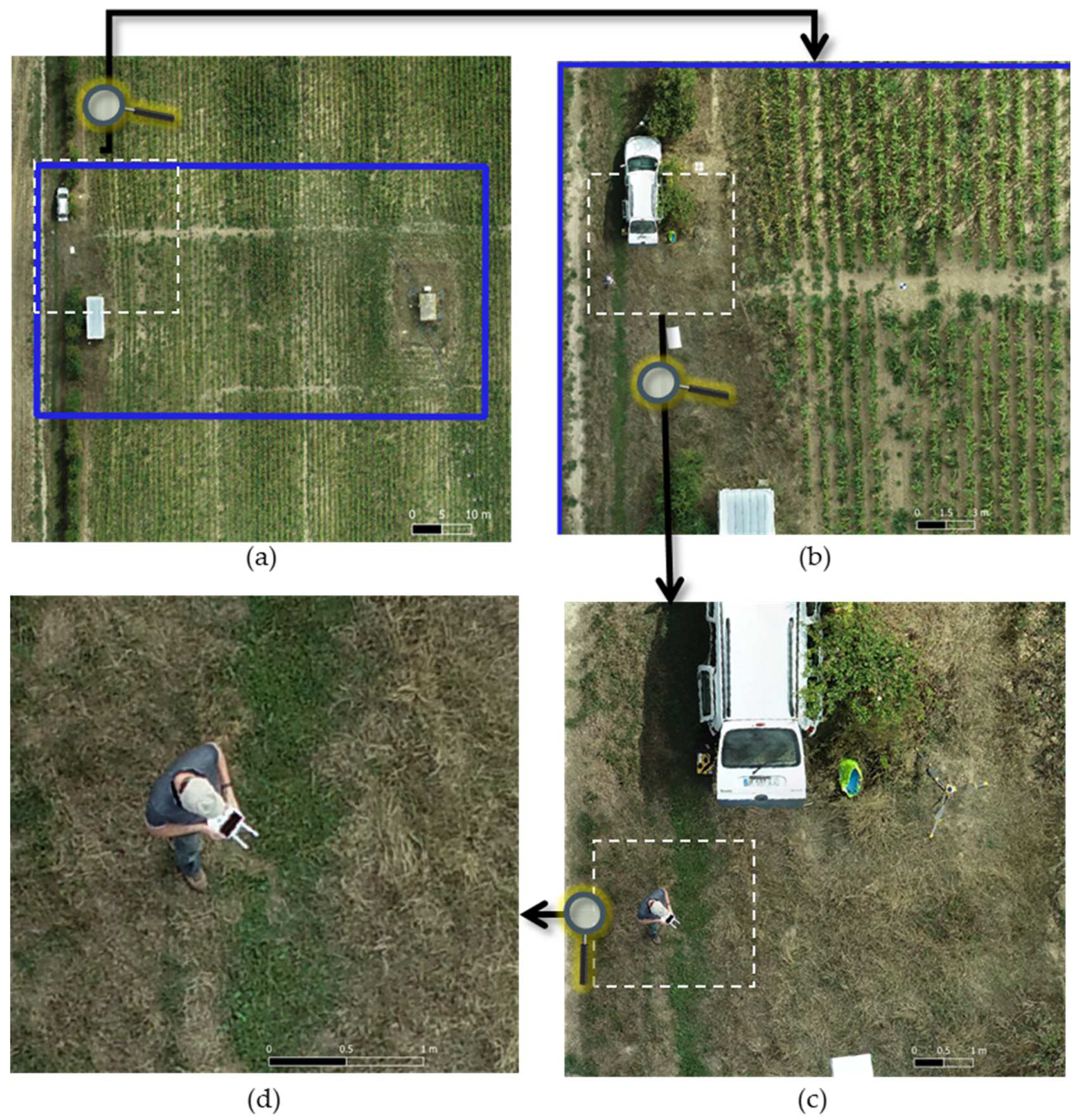
2.1. The Study Area
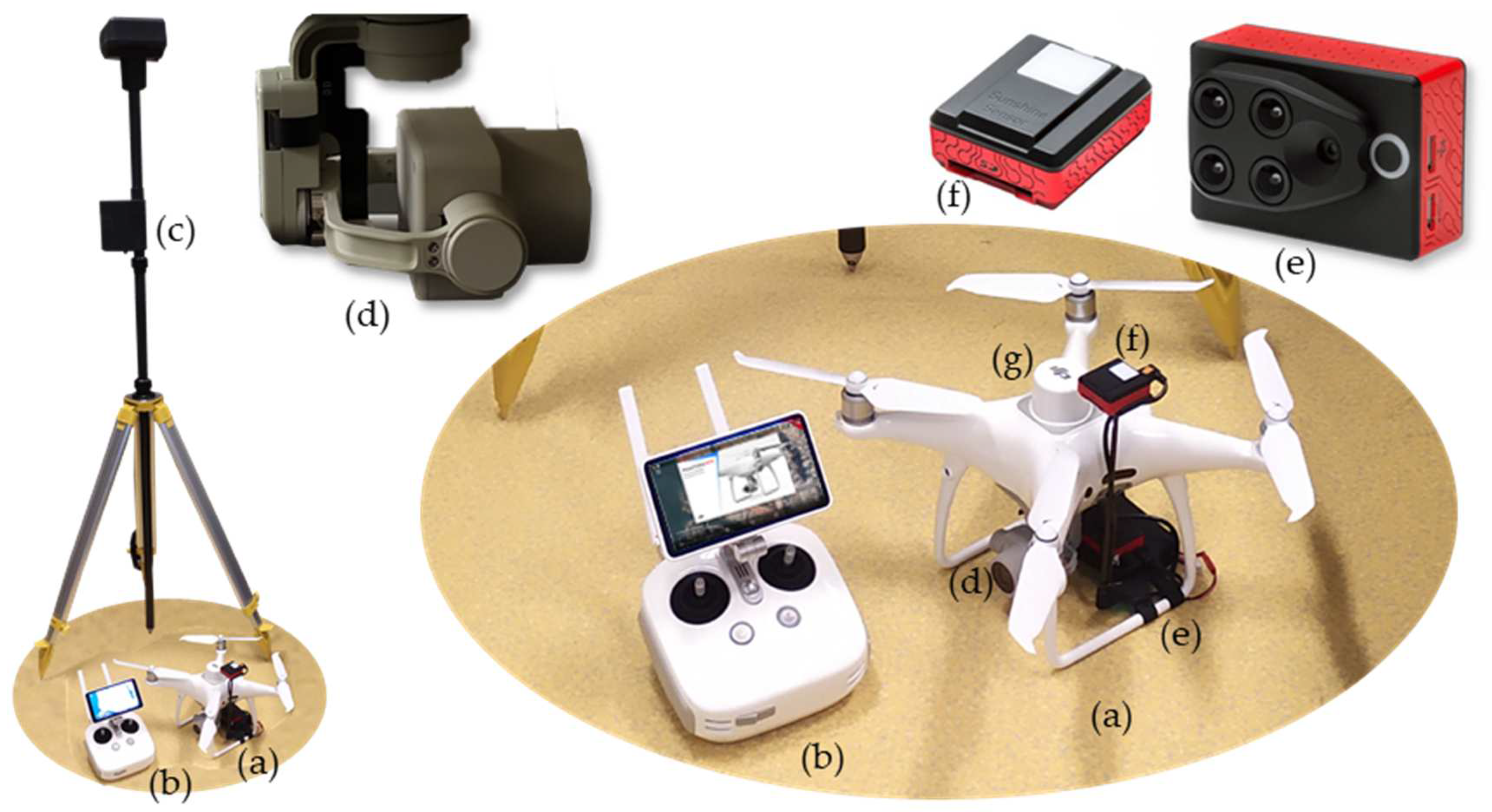
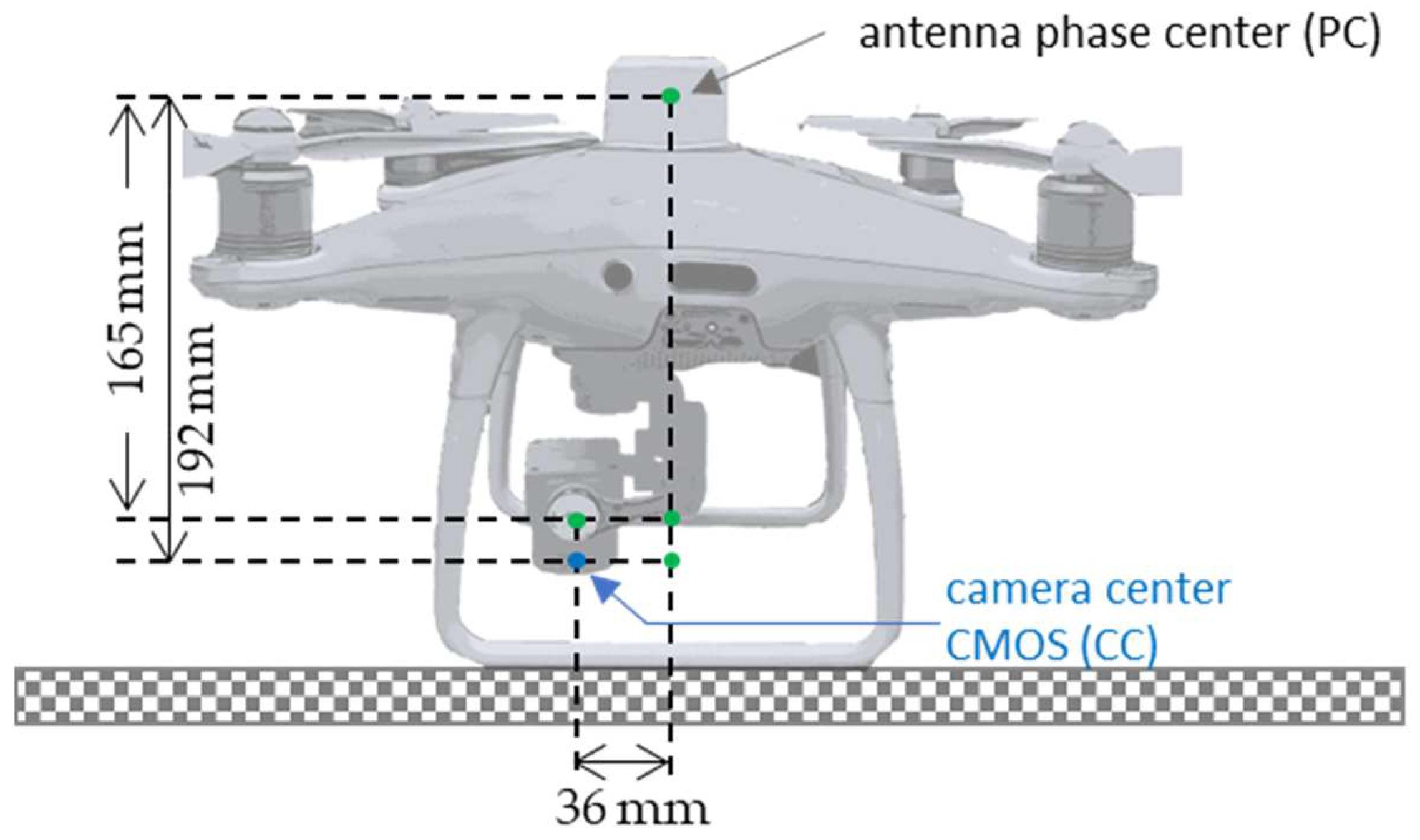
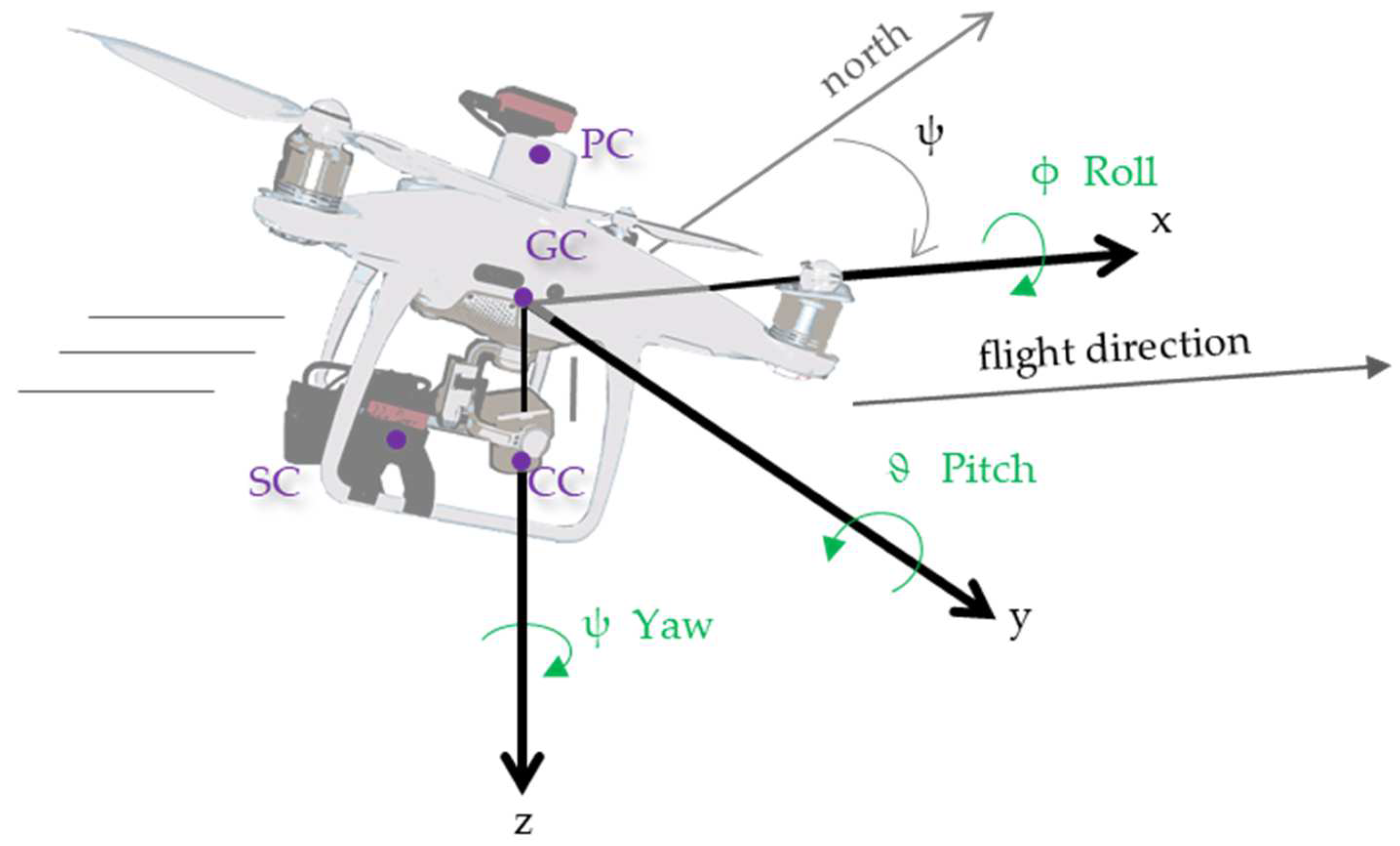
2.2. The Unmanned Aerial Vehicule
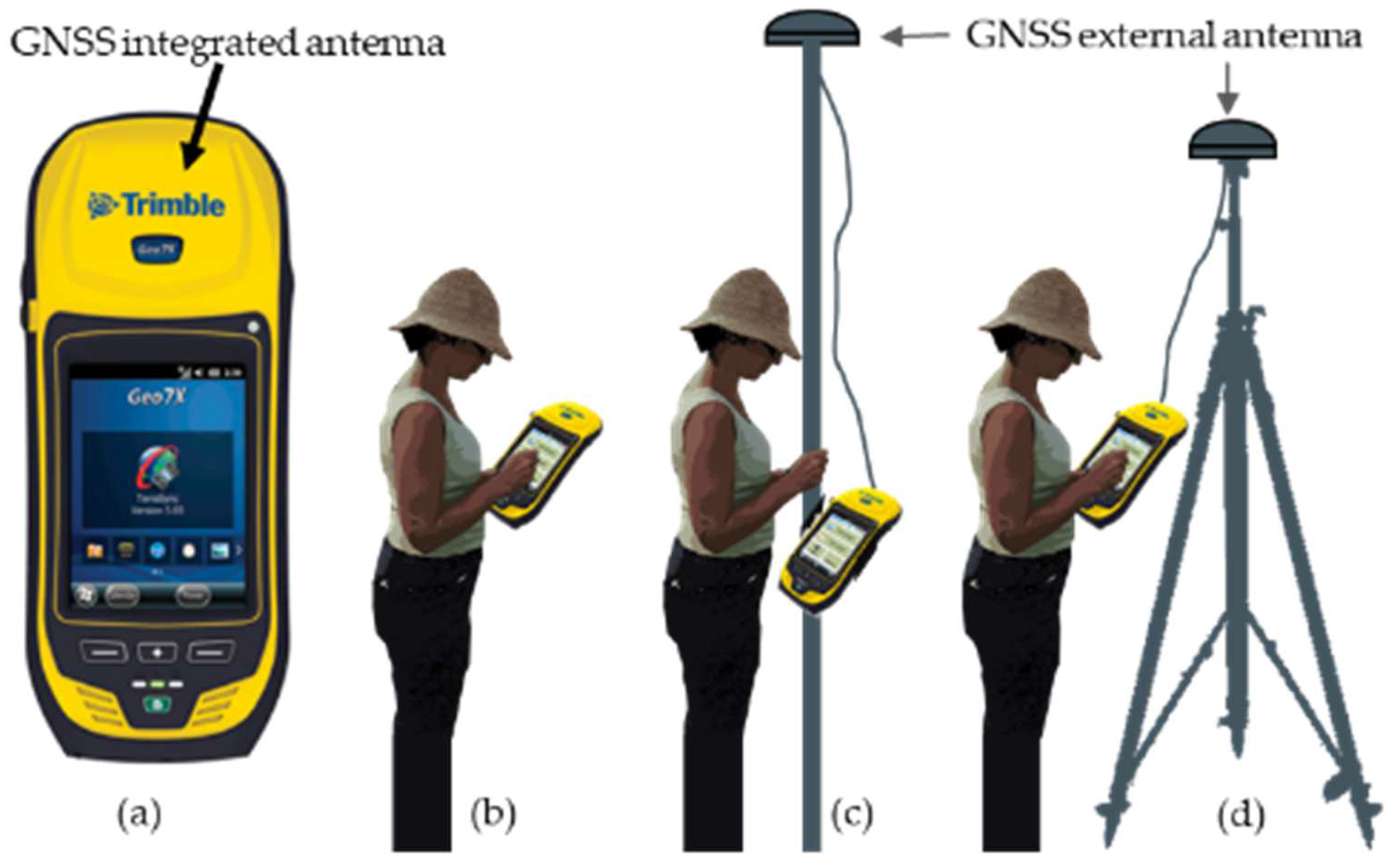
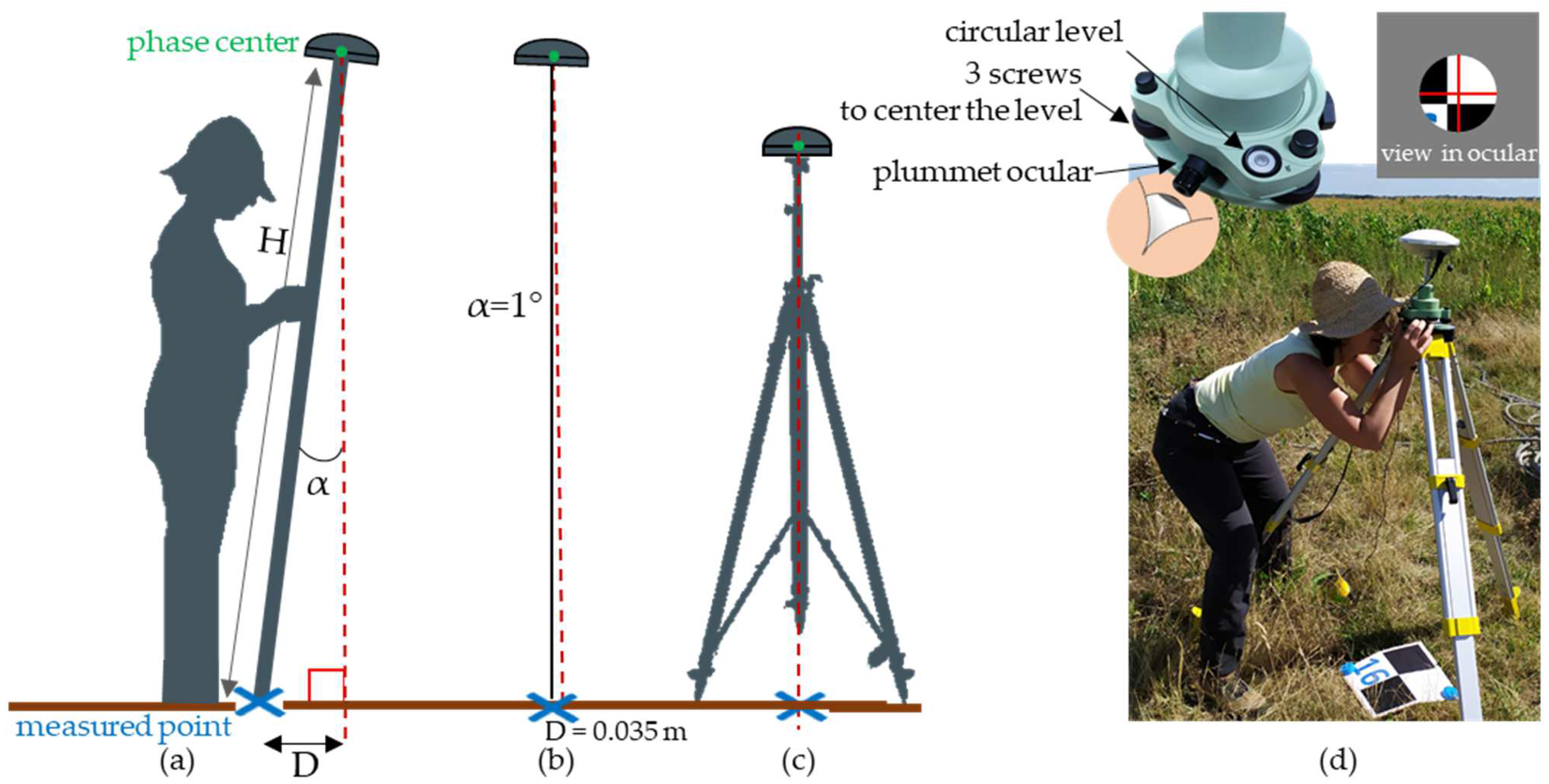
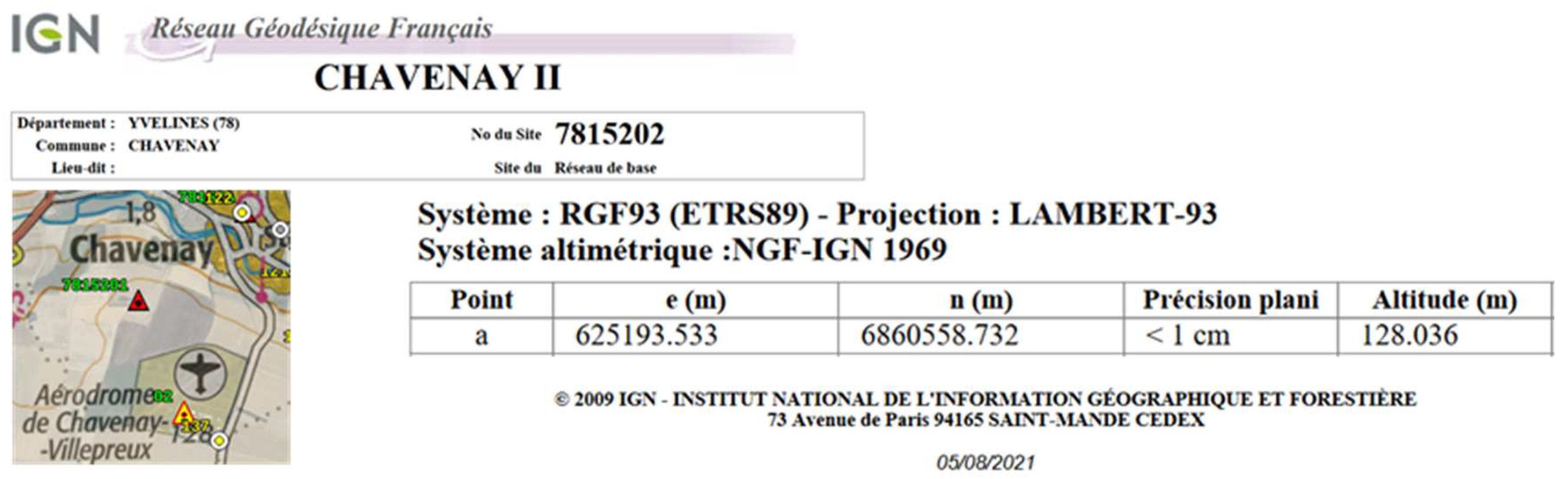
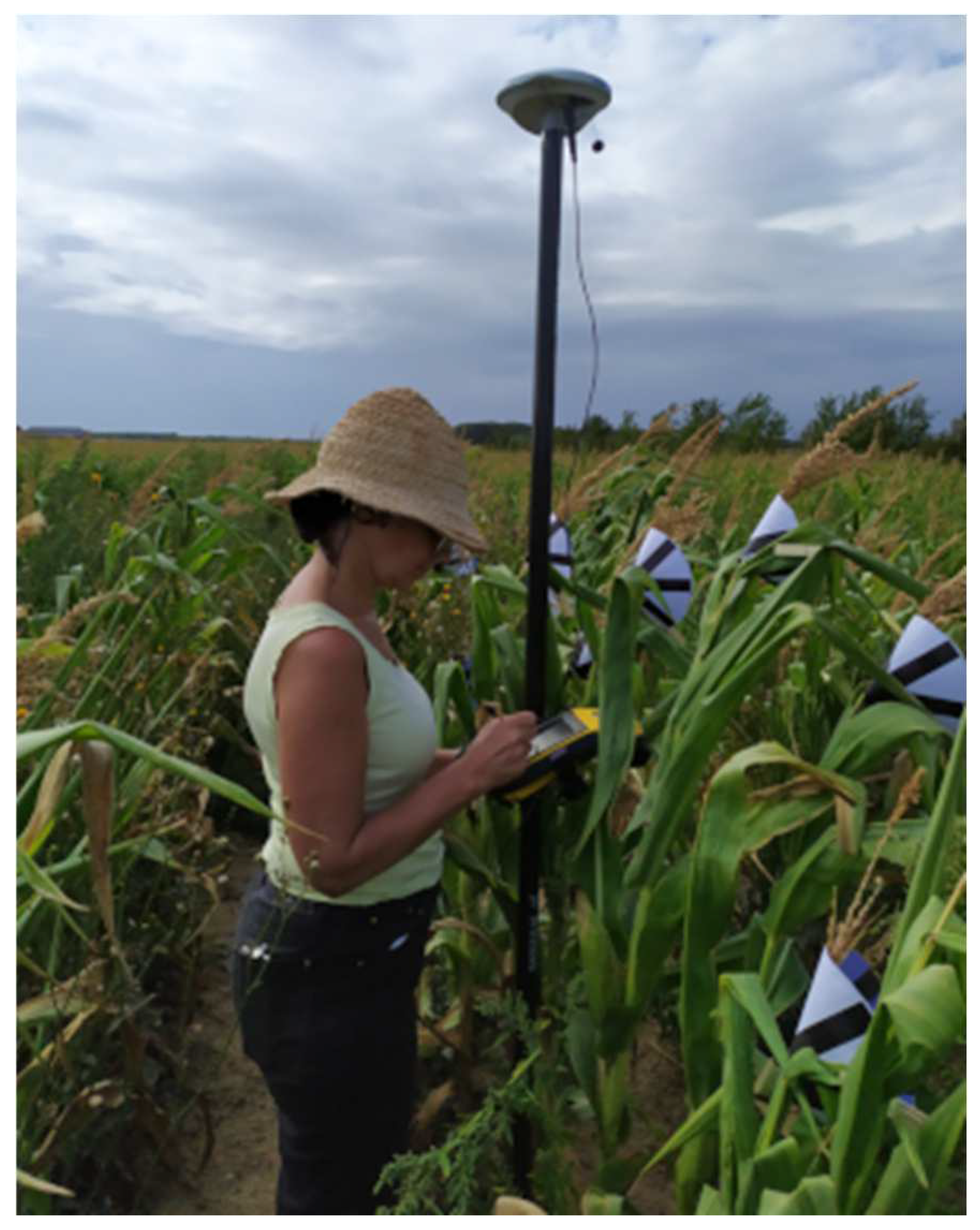
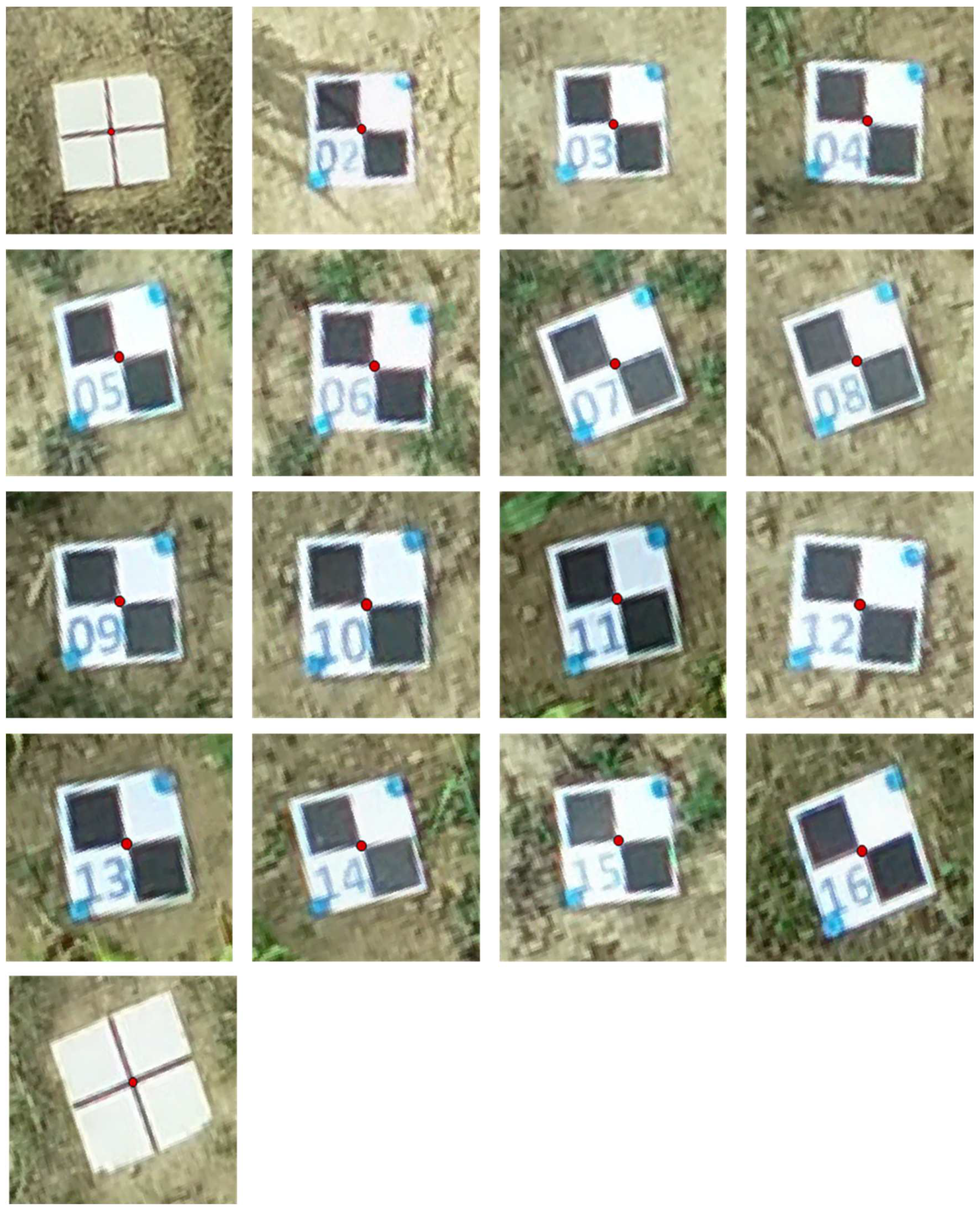
2.3. Reference Measurement Method for GCP Positions
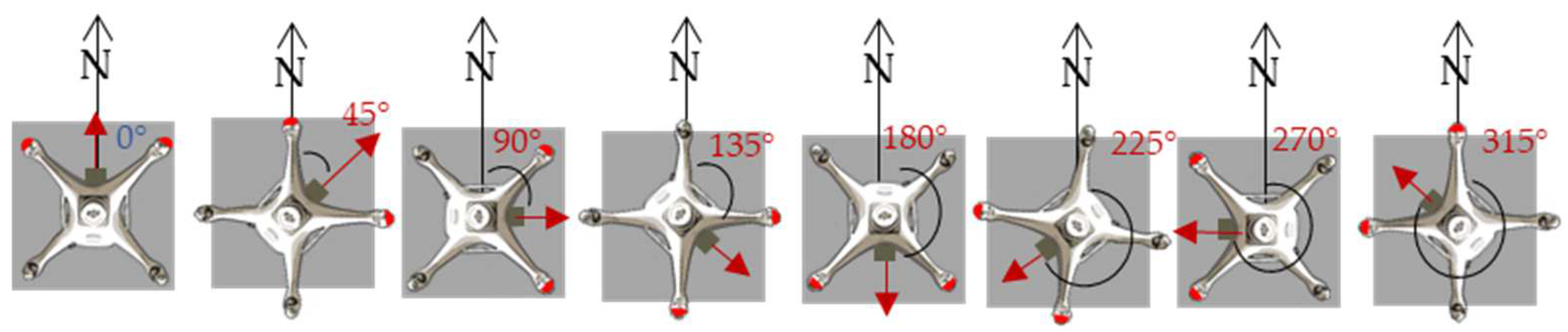
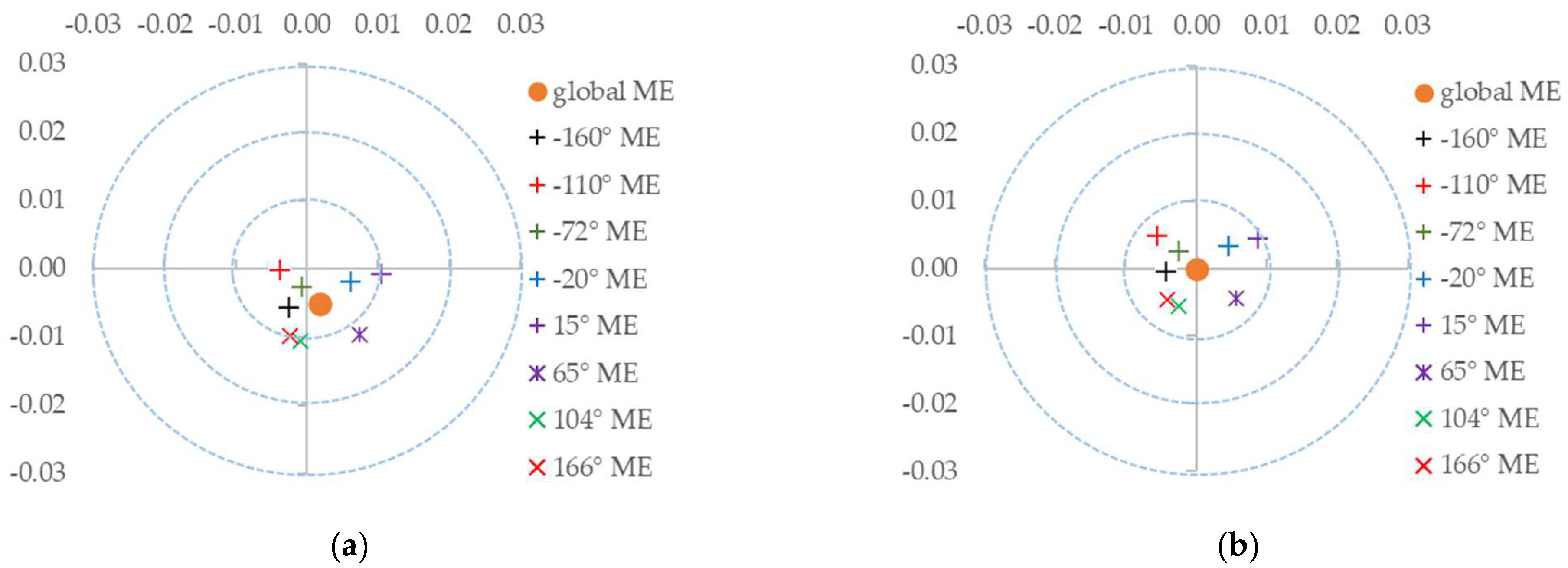
2.4. Measurement of the P4-RTK DGNSS Receiver Accuracy in Static Mode on the Ground
2.5. Comparison of Different GNSS Modes in Flight
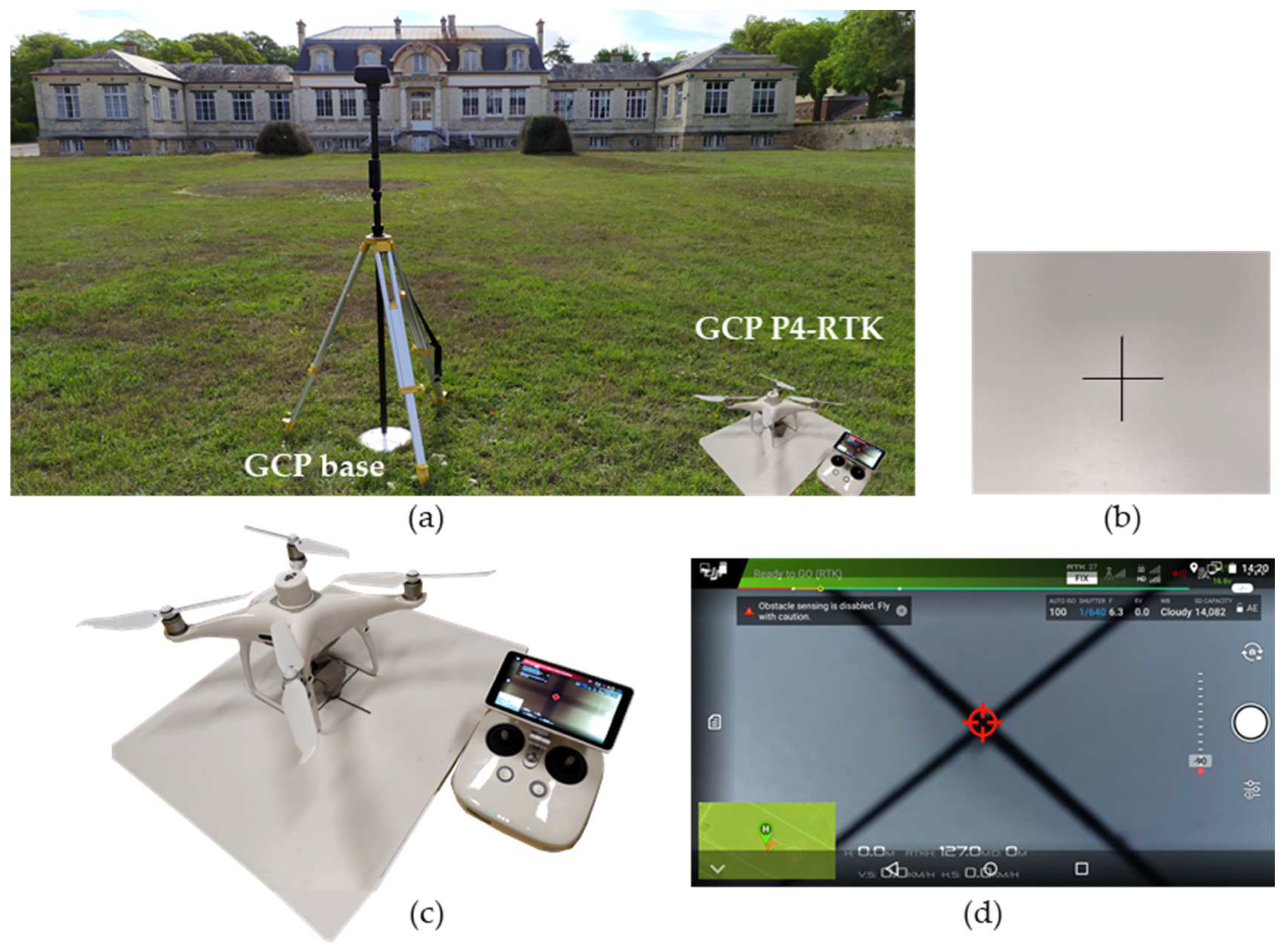
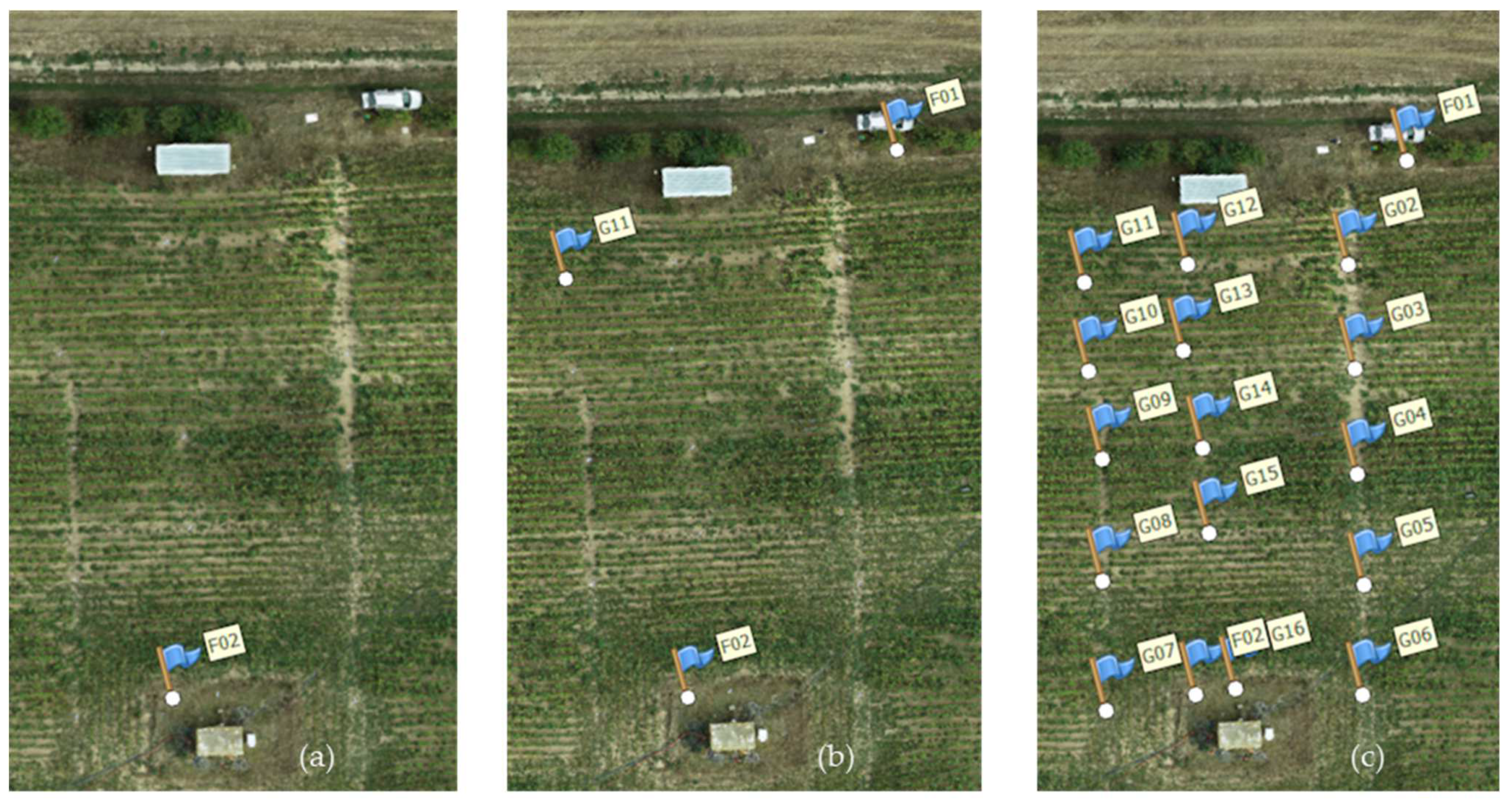
2.5.1. GCPs
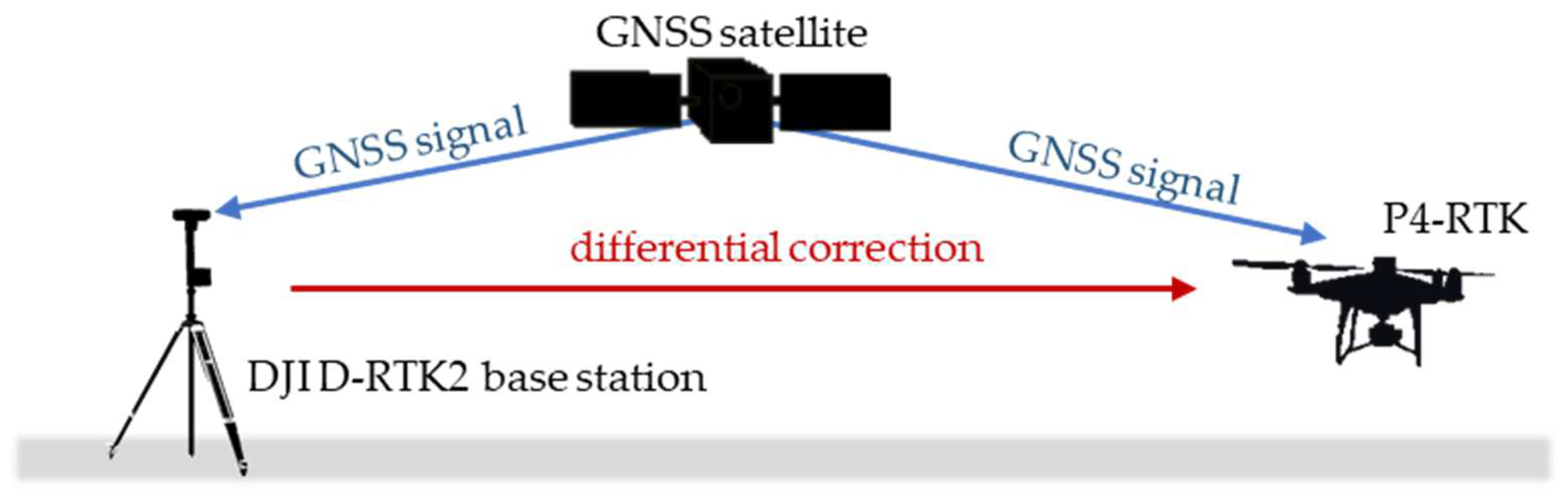
2.5.2. RTK Mode with the D-RTK2 Base Station Antenna
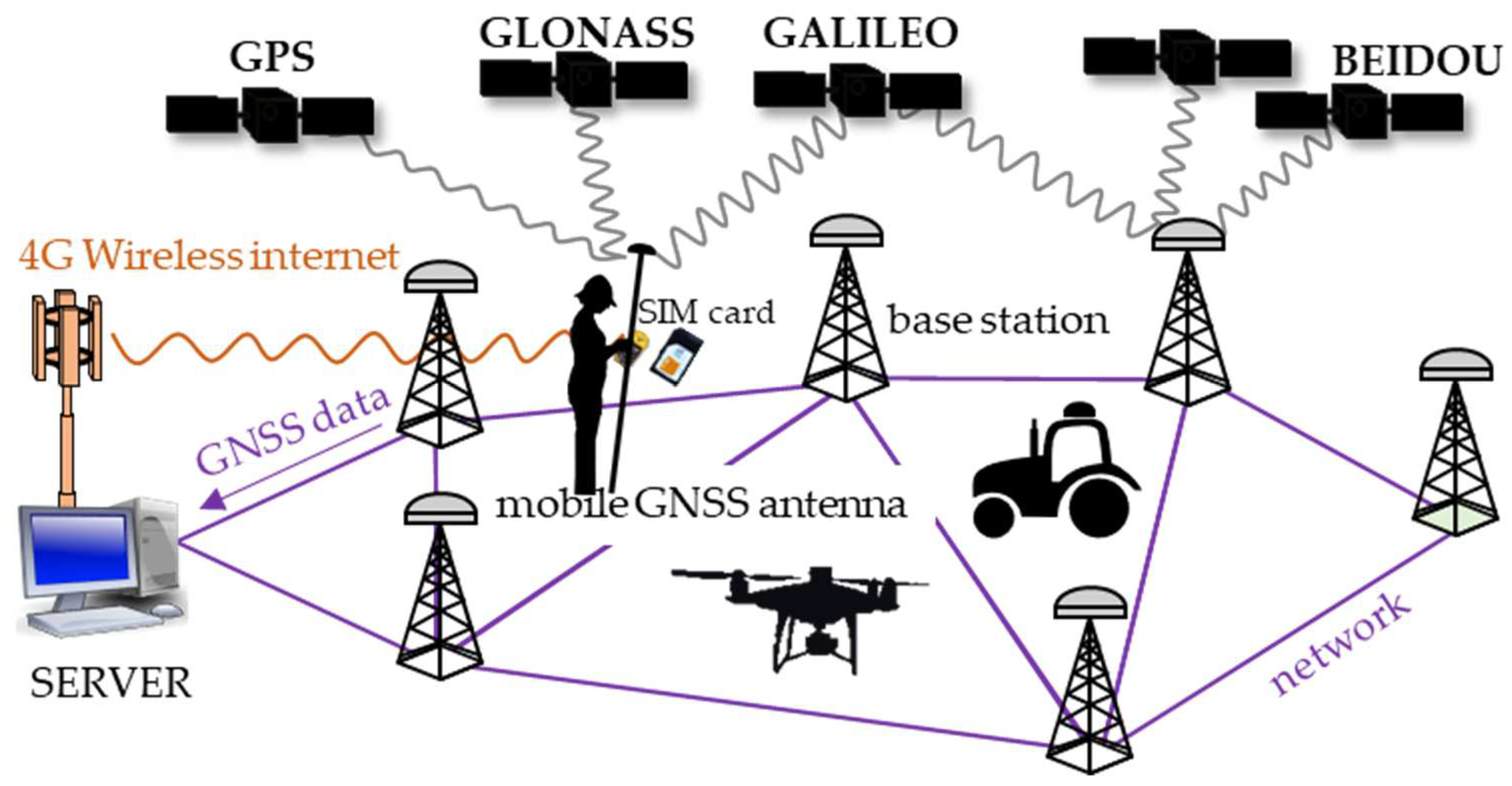
2.5.3. RTK Mode with the French Teria Network RTK Service
2.5.4. Simple GNSS Mode
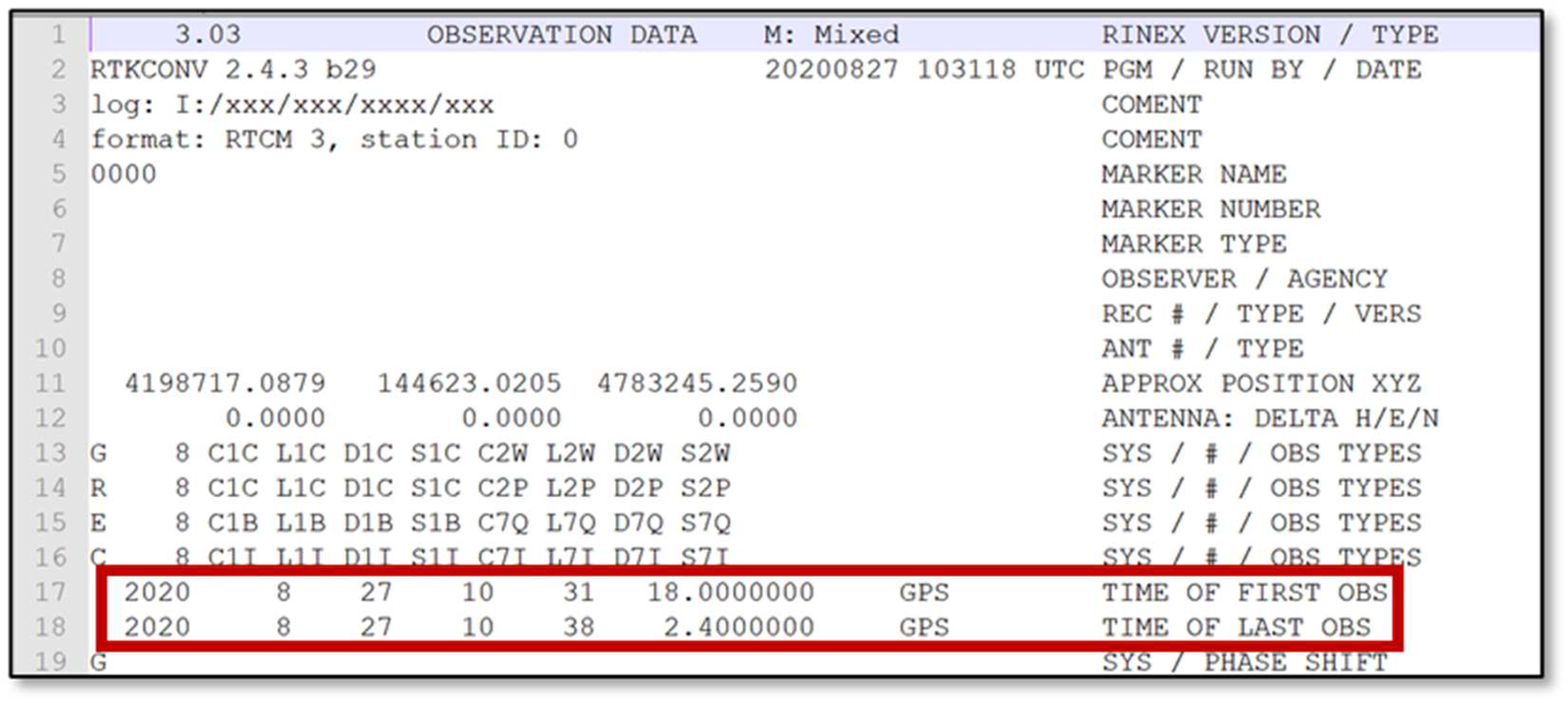
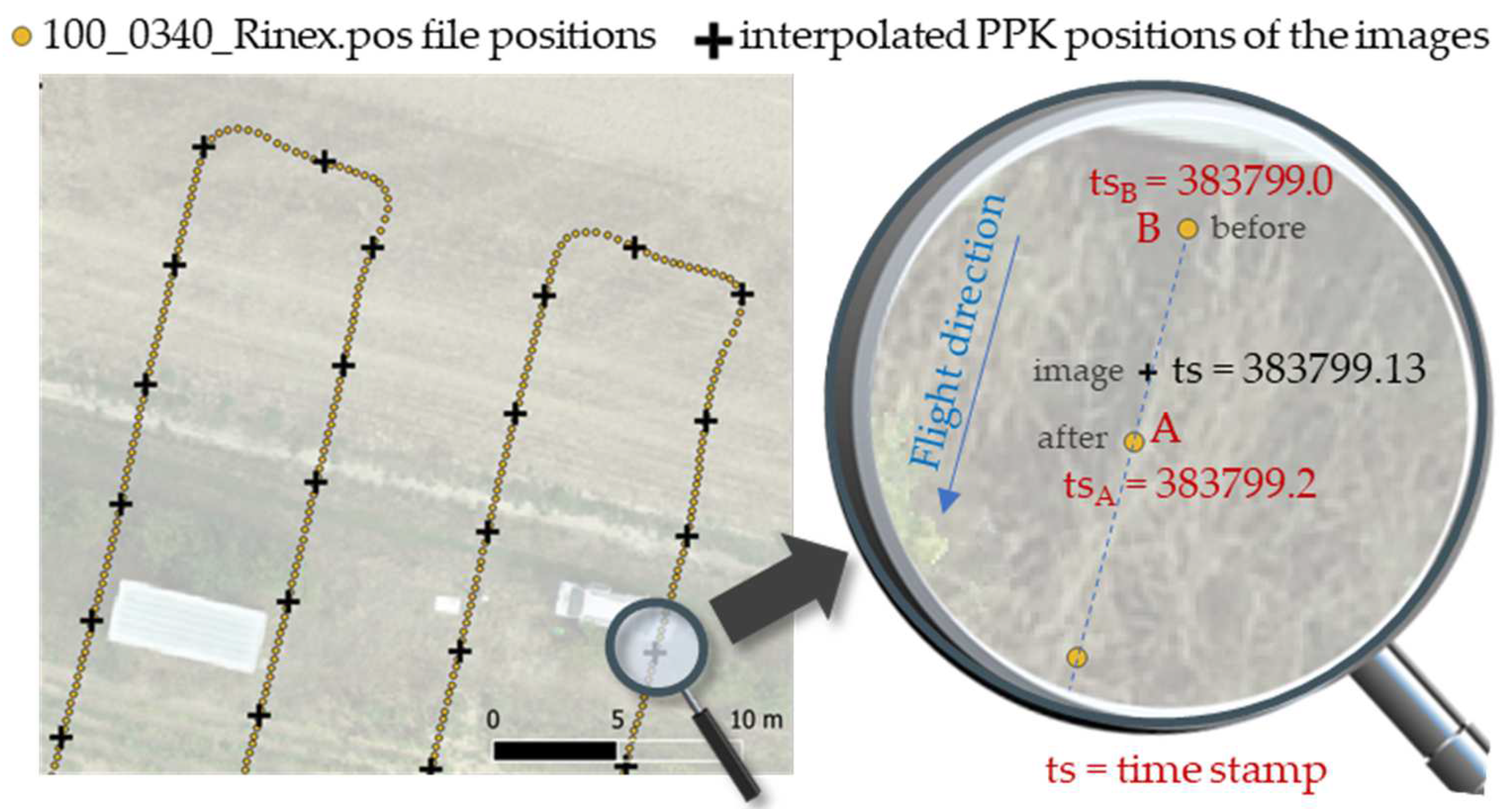
2.5.5. PPK Mode Using RTKLIB and the French “RGP” Network
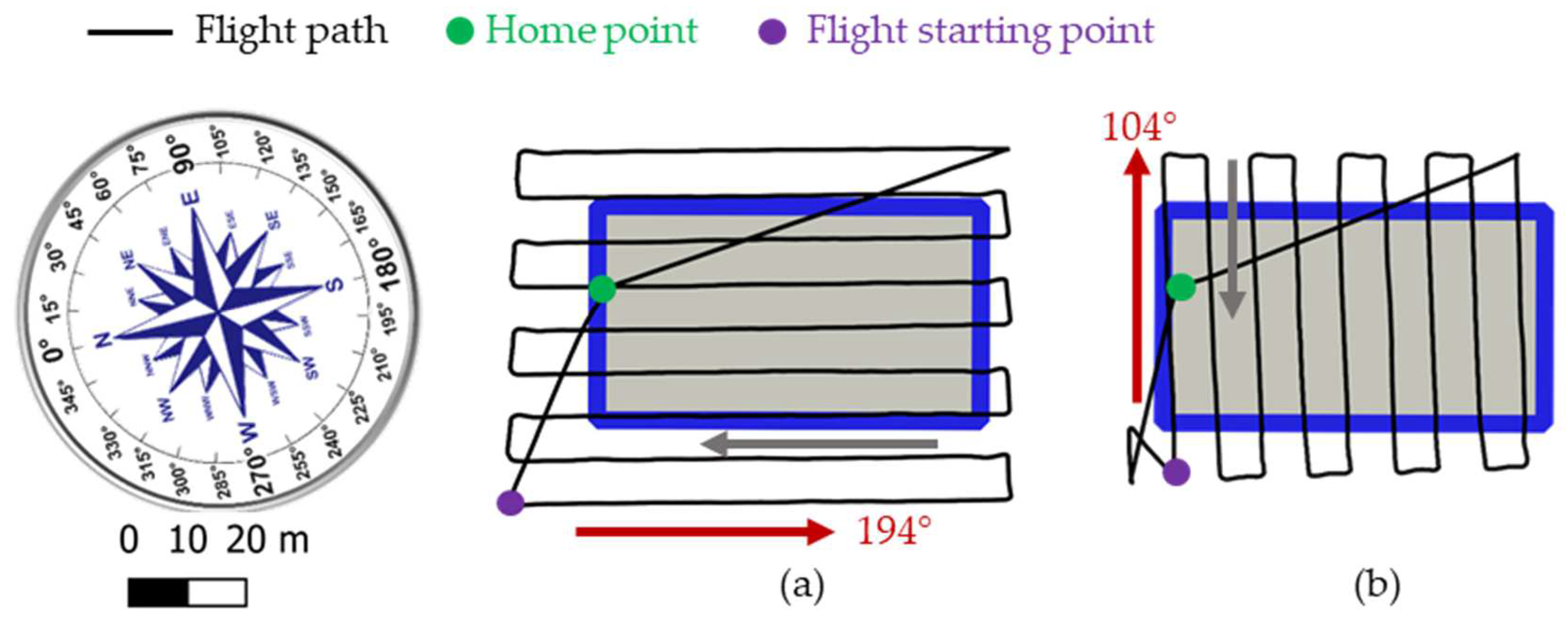
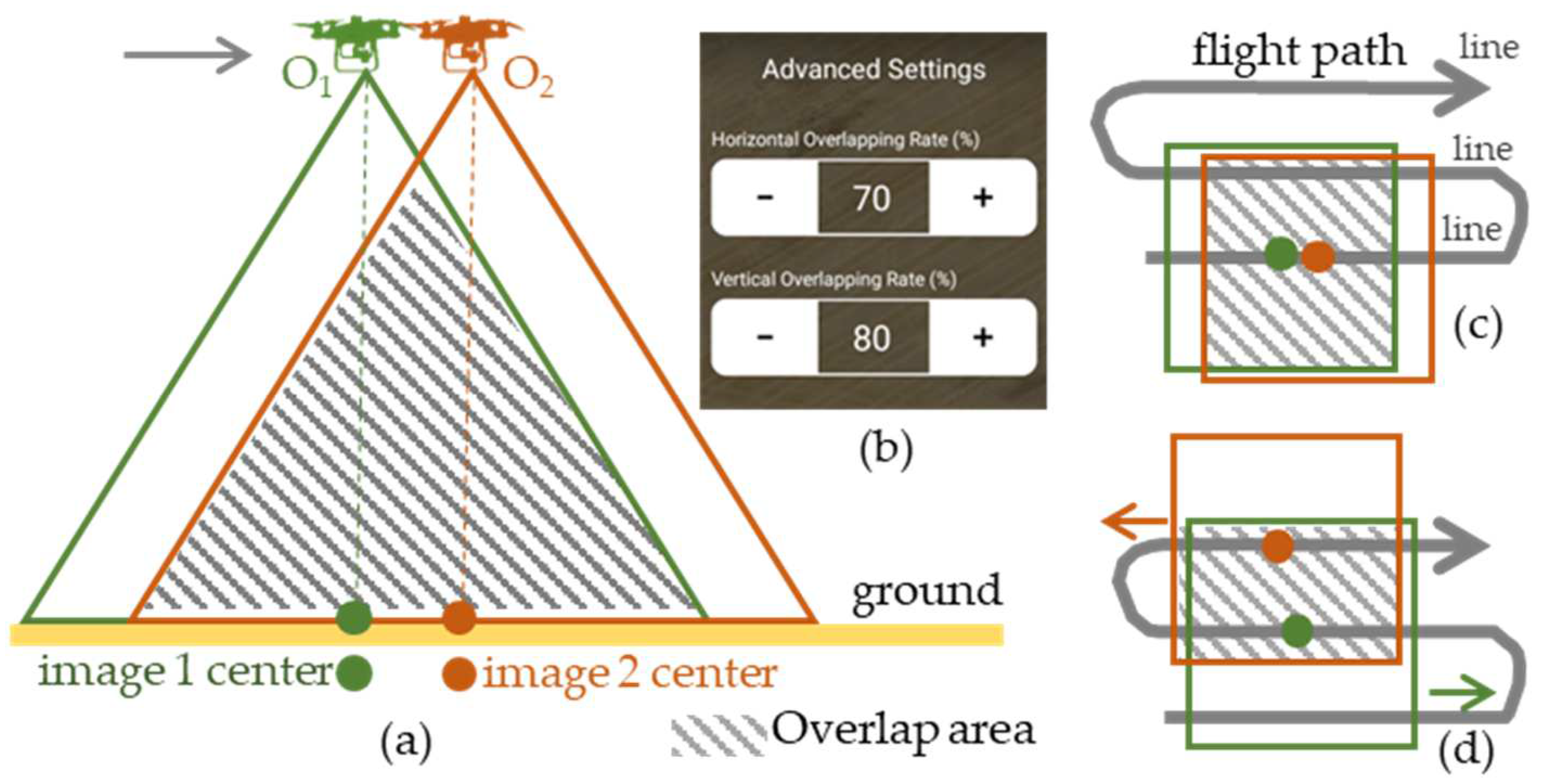
2.6. The UAV Flights
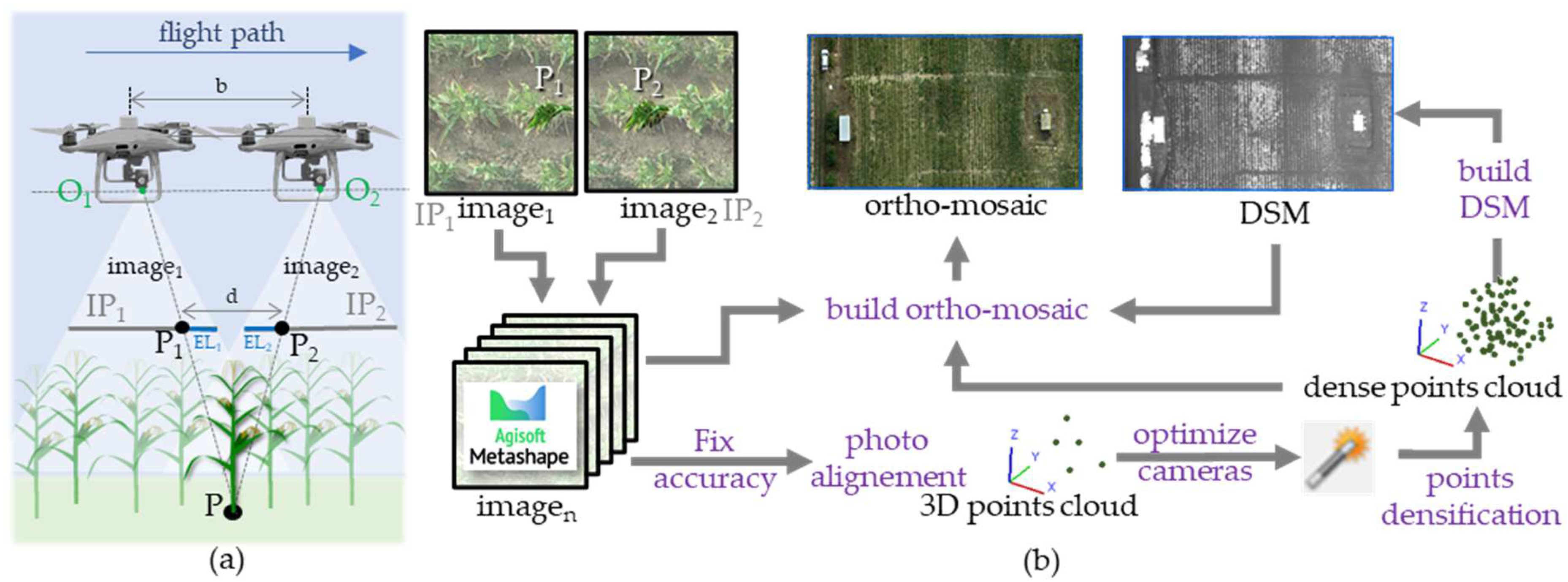
2.7. Photogrammetric Reconstruction
2.8. GCP Position Accuracy Evaluation
2.9. Evaluation of the Accuracy of Maize Plant Position in Ortho-Mosaics
3. Results
3.1. Reference Measurement Method for GCP Positions
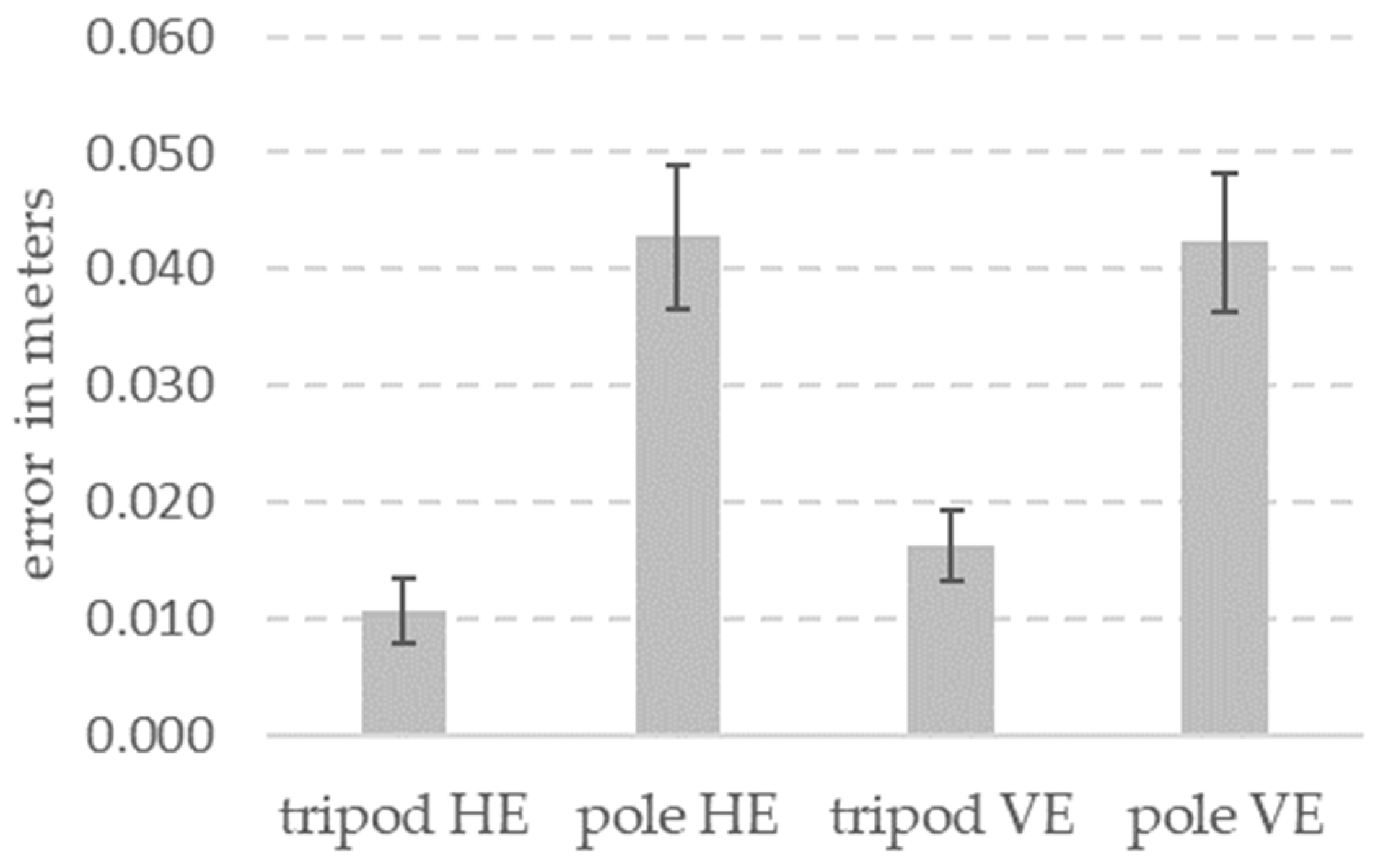
3.2. P4-RTK DGNSS Receiver Accuracy in Static Mode on the Ground
3.3. Photogrammetric Reconstruction
3.4. GCP Position Accuracy According to the Different Reconstructions
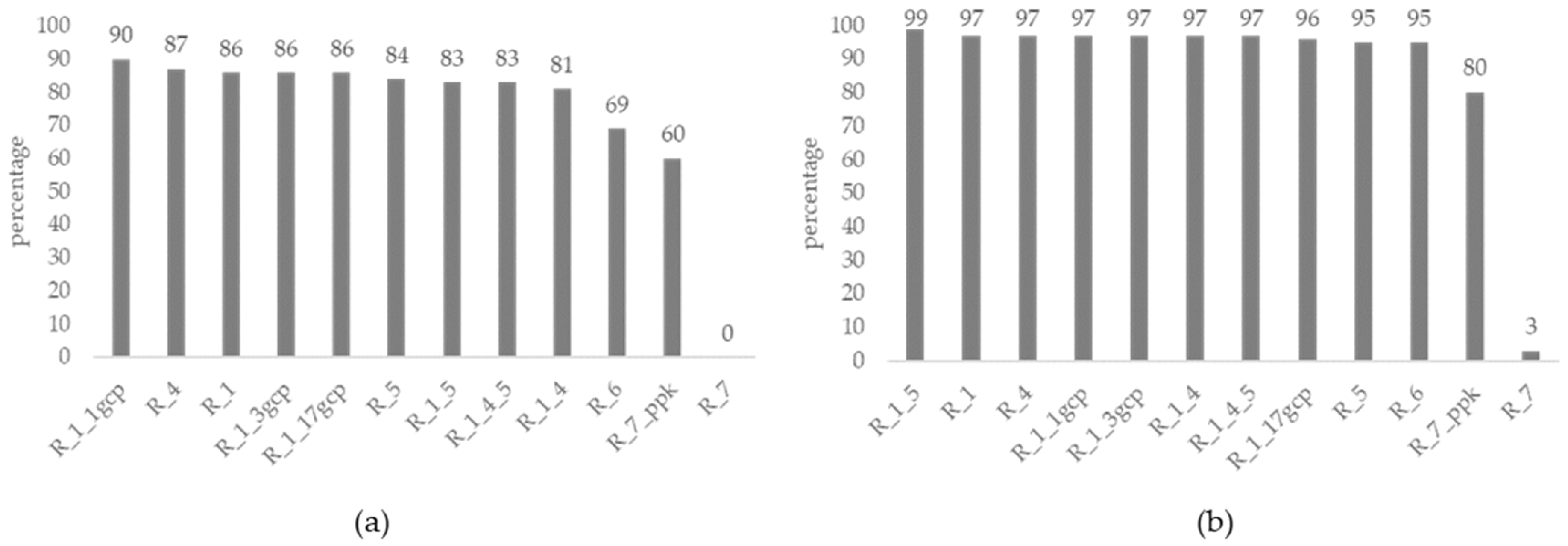
3.5. Maize Plant Position Accuracy according to the Different Reconstructions
4. Discussion
4.1. GNSS Reference Measurement with Trimble Geo7x
4.2. P4-RTK DGNSS Receiver Accuracy
4.3. Maize Plant Position Accuracy
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GCP | R_1 HE m | R_1 VE m | R_5 HE m | R_5 VE m | R_6 HE m | R_6 VE m | R_7ppk HE m | R_7ppk VE m | R_1_1gcp HE m | R_1_1gcp VE m |
| F01 | 0.011 | 0.043 | 0.009 | 0.059 | 0.011 | 0.045 | 0.015 | 0.071 | 0.011 | 0.008 |
| F02 | 0.015 | 0.039 | 0.017 | 0.046 | 0.010 | 0.042 | 0.028 | 0.086 | 0.015 | 0.003 |
| G02 | 0.005 | 0.032 | 0.016 | 0.070 | 0.001 | 0.036 | 0.017 | 0.086 | 0.005 | 0.006 |
| G03 | 0.019 | 0.064 | 0.024 | 0.027 | 0.012 | 0.064 | 0.027 | 0.050 | 0.019 | 0.031 |
| G04 | 0.013 | 0.028 | 0.023 | 0.063 | 0.011 | 0.031 | 0.017 | 0.088 | 0.015 | 0.011 |
| G05 | 0.017 | 0.024 | 0.022 | 0.064 | 0.015 | 0.021 | 0.021 | 0.088 | 0.017 | 0.013 |
| G06 | 0.003 | 0.060 | 0.004 | 0.026 | 0.006 | 0.063 | 0.017 | 0.055 | 0.003 | 0.025 |
| G07 | 0.005 | 0.035 | 0.013 | 0.051 | 0.010 | 0.043 | 0.020 | 0.093 | 0.006 | 0.003 |
| G08 | 0.011 | 0.008 | 0.015 | 0.104 | 0.022 | 0.004 | 0.008 | 0.139 | 0.011 | 0.047 |
| G09 | 0.006 | 0.000 | 0.008 | 0.095 | 0.009 | 0.006 | 0.023 | 0.132 | 0.003 | 0.035 |
| G10 | 0.008 | 0.021 | 0.020 | 0.079 | 0.007 | 0.028 | 0.025 | 0.113 | 0.008 | 0.019 |
| G11 | 0.015 | 0.006 | 0.028 | 0.105 | 0.010 | 0.017 | 0.032 | 0.128 | 0.015 | 0.030 |
| G12 | 0.011 | 0.018 | 0.010 | 0.121 | 0.011 | 0.013 | 0.023 | 0.148 | 0.011 | 0.056 |
| G13 | 0.014 | 0.006 | 0.011 | 0.087 | 0.008 | 0.006 | 0.029 | 0.119 | 0.014 | 0.030 |
| G14 | 0.020 | 0.034 | 0.024 | 0.064 | 0.009 | 0.037 | 0.032 | 0.086 | 0.020 | 0.002 |
| G15 | 0.021 | 0.032 | 0.016 | 0.058 | 0.016 | 0.035 | 0.035 | 0.092 | 0.021 | 0.004 |
| G16 | 0.018 | 0.047 | 0.023 | 0.032 | 0.017 | 0.052 | 0.018 | 0.072 | 0.018 | 0.012 |
References
- World Population Prospects—Population Division—United Nations. Available online: https://population.un.org/wpp/ (accessed on 20 September 2021).
- The Future of Food and Agriculture: Trends and Challenges; Food and Agriculture Organization of the United Nations: Rome, Italy, 2017; ISBN 978-92-5-109551-5.
- OECD. Pesticides and Sustainable Pest Management Vision for the Future: A Cooperative Global Approach to the Regulation of Agricultural Pesticides and Sustainable Pest Management. Available online: https://www.oecd.org/chemicalsafety/pesticides-biocides/OECD-Pest-Vision-Final.pdf (accessed on 20 September 2021).
- Méndez-Vázquez, L.J.; Lira-Noriega, A.; Lasa-Covarrubias, R.; Cerdeira-Estrada, S. Delineation of Site-Specific Management Zones for Pest Control Purposes: Exploring Precision Agriculture and Species Distribution Modeling Approaches. Comput. Electron. Agric. 2019, 167, 105101. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- IGN Caméra Légère IGN | IGN Lightweight Camera. Available online: http://www.ign.fr/institut/innovation/camera-legere-ign (accessed on 8 October 2020).
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and Segmentation of Vine Canopy in Ultra-High Spatial Resolution RGB Imagery Obtained from Unmanned Aerial Vehicle (UAV): A Case Study in a Commercial Vineyard. Remote Sens. 2017, 9, 268. [Google Scholar] [CrossRef] [Green Version]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-Based Multispectral Remote Sensing for Precision Agriculture: A Comparison between Different Cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Singh, P.; Pandey, P.C.; Petropoulos, G.P.; Pavlides, A.; Srivastava, P.K.; Koutsias, N.; Deng, K.A.K.; Bao, Y. 8—Hyperspectral Remote Sensing in Precision Agriculture: Present Status, Challenges, and Future Trends. In Hyperspectral Remote Sensing; Pandey, P.C., Srivastava, P.K., Balzter, H., Bhattacharya, B., Petropoulos, G.P., Eds.; Earth Observation; Elsevier: Amsterdam, The Netherlands, 2020; pp. 121–146. ISBN 978-0-08-102894-0. [Google Scholar]
- Zhang, Y.; Xia, C.; Zhang, X.; Cheng, X.; Feng, G.; Wang, Y.; Gao, Q. Estimating the Maize Biomass by Crop Height and Narrowband Vegetation Indices Derived from UAV-Based Hyperspectral Images. Ecol. Indic. 2021, 129, 107985. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Habib, A. Quality Control and Crop Characterization Framework for Multi-Temporal UAV LiDAR Data over Mechanized Agricultural Fields. Remote Sens. Environ. 2021, 256, 112299. [Google Scholar] [CrossRef]
- Ortega-Farias, S.; Esteban-Condori, W.; Riveros-Burgos, C.; Fuentes-Peñailillo, F.; Bardeen, M. Evaluation of a Two-Source Patch Model to Estimate Vineyard Energy Balance Using High-Resolution Thermal Images Acquired by an Unmanned Aerial Vehicle (UAV). Agric. For. Meteorol. 2021, 304–305, 108433. [Google Scholar] [CrossRef]
- Van de Vyvere, L.; Desenfans, O. MISTRALE: Soil Moisture Mapping Service Based on a UAV-Embedded GNSS-Reflectometry Sensor. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 17–22 April 2016; Volume 18, p. 5905. [Google Scholar]
- Xie, C.; Yang, C. A Review on Plant High-Throughput Phenotyping Traits Using UAV-Based Sensors. Comput. Electron. Agric. 2020, 178, 105731. [Google Scholar] [CrossRef]
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sens. 2021, 13, 2139. [Google Scholar] [CrossRef]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy Assessment of Real-Time Kinematics (RTK) Measurements on Unmanned Aerial Vehicles (UAV) for Direct Geo-Referencing. Geo-Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef] [Green Version]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef] [Green Version]
- Cledat, E.; Jospin, L.V.; Cucci, D.A.; Skaloud, J. Mapping Quality Prediction for RTK/PPK-Equipped Micro-Drones Operating in Complex Natural Environment. ISPRS J. Photogramm. Remote Sens. 2020, 167, 24–38. [Google Scholar] [CrossRef]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in Direct Geo-Referencing of the UAV Imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef] [Green Version]
- González-García, J.; Swenson, R.L.; Gómez-Espinosa, A. Real-Time Kinematics Applied at Unmanned Aerial Vehicles Positioning for Orthophotography in Precision Agriculture. Comput. Electron. Agric. 2020, 177, 105695. [Google Scholar] [CrossRef]
- Yu, R.; Luo, Y.; Zhou, Q.; Zhang, X.; Wu, D.; Ren, L. Early Detection of Pine Wilt Disease Using Deep Learning Algorithms and UAV-Based Multispectral Imagery. For. Ecol. Manag. 2021, 497, 119493. [Google Scholar] [CrossRef]
- Xu, W.; Chen, P.; Zhan, Y.; Chen, S.; Zhang, L.; Lan, Y. Cotton Yield Estimation Model Based on Machine Learning Using Time Series UAV Remote Sensing Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102511. [Google Scholar] [CrossRef]
- Inrae QualiAgro. Available online: http://www6.inra.fr/qualiagro_eng (accessed on 8 October 2020).
- Mas Seeds Maize Seed MAS 220.V. Available online: https://www.masseeds.fr/nos-cultures-et-semences/nos-semences/mais/mas-220v (accessed on 10 February 2022).
- Mas Seeds. Available online: https://www.masseeds.fr/ (accessed on 11 February 2022).
- DJI PHANTOM 4 RTK User Manual v2.4. Available online: https://dl.djicdn.com/downloads/phantom_4_rtk/20210716/Phantom_4_RTK_User_Manual_v2.4_EN.pdf (accessed on 3 September 2021).
- IGN Serveur de Fiches | Géodésie. Available online: https://geodesie.ign.fr/fiches (accessed on 6 September 2021).
- Harvey, P. ExifTool. Available online: https://exiftool.org/ (accessed on 4 September 2021).
- IGN Logiciels Circé | Géodésie. Available online: https://geodesie.ign.fr/index.php?page=circe (accessed on 4 September 2021).
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [Green Version]
- IGN RGP Network Map. Available online: http://rgp.ign.fr/ (accessed on 17 September 2021).
- rtklib RTKLIB: An Open Source Program Package for GNSS Positioning. Available online: http://www.rtklib.com/ (accessed on 17 September 2021).
- Aerotas Phantom 4 RTK—PPK Processing Workflow | Drone Data Processing. Available online: https://www.aerotas.com/phantom-4-rtk-ppk-processing-workflow (accessed on 17 September 2021).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Ullman, S. The Interpretation of Structure from Motion. Proc. R. Soc. Lond. B 1979, 203, 405–426. [Google Scholar] [CrossRef]
- Agisoft Agisoft Metashape User Manual—Professional Edition, Version 1.7 2021. Available online: https://www.agisoft.com/pdf/metashape-pro_1_7_en.pdf (accessed on 22 March 2022).
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Leica Geosystems Leica iCON GPS 70. Available online: https://leica-geosystems.com/fr-CH/products/construction-tps-and-gnss/smart-antennas/leica-icon-gps-70-series (accessed on 22 October 2021).
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using DJI Phantom 4 RTK Drone for Topographic Mapping of Coastal Areas. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Enschede, The Netherlands, 10–14 June 2019; Volume XLII-2/W13, pp. 625–630. [Google Scholar]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Gilliot, J.M.; Michelin, J.; Hadjard, D.; Houot, S. An Accurate Method for Predicting Spatial Variability of Maize Yield from UAV-Based Plant Height Estimation: A Tool for Monitoring Agronomic Field Experiments. Precis. Agric. 2020, 22, 897–921. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of Plant Density of Wheat Crops at Emergence from Very Low Altitude UAV Imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Velumani, K.; Lopez-Lozano, R.; Madec, S.; Guo, W.; Gillet, J.; Comar, A.; Baret, F. Estimates of Maize Plant Density from UAV RGB Images Using Faster-RCNN Detection Model: Impact of the Spatial Resolution. Plant Phenomics 2021, 2021, 9824843. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Basso, B.; Price, R.F.; Putman, G.; Shuai, G. Estimating Plant Distance in Maize Using Unmanned Aerial Vehicle (UAV). PLoS ONE 2018, 13, e0195223. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Azur Drones Skeyetech—Autonomous Drone for Security and Safety. Available online: https://www.azurdrones.com/product/skeyetech/ (accessed on 22 March 2022).
- SESAR Join Undertaking U-Space Blueprint. Available online: https://www.sesarju.eu/sites/default/files/documents/reports/U-space%20Blueprint%20brochure%20final.PDF (accessed on 22 March 2022).






| Positioning Mode | Frequencies | Elevation Mask | Rec Dynamics | Solution Format | Time Format | Integer Ambiguity Res |
|---|---|---|---|---|---|---|
| Kinematic | L1 + L2 | 30° | OFF | Lat/lon/Height | ww ssss GPST | Fix and Hold |
| Fly | Date | Time UTC | AGL m | GSD m | Fly Direction ° | Overlap% Forward /Side | Speed m s−1 | Sat nb | GNSS Mode | Gimbal Angle | Sensors |
|---|---|---|---|---|---|---|---|---|---|---|---|
| f1 | 27 August 2020 | 9 h 3 | 25 | 0.007 | 194 | 80/70 | 1.8 | 18–21 | D-RTK2 | −90 | RGB |
| f4 | 27 August 2020 | 9 h 42 | 25 | 0.007 | 104 | 80/70 | 1.8 | 16–21 | D-RTK2 | −90 | RGB |
| f5 | 27 August 2020 | 9 h 57 | 40 | 0.011 | 104 | 80/70 | 1.8 | 18–20 | D-RTK2 | −90 | RGB |
| f6 | 27 August 2020 | 10 h 23 | 25 | 0.007 | 194 | 80/70 | 1.8 | 18–21 | TERIA | −90 | RGB |
| f7 | 27 August 2020 | 10 h 31 | 25 | 0.007 | 194 | 80/70 | 1.8 | 17–20 | GNSS | −90 | RGB |
| Workflow Step | Parameter | Parameter Value |
|---|---|---|
| Add Photos | Camera accuracy (m) | 0.01 |
| Align Photos | Accuracy | High |
| Align Photos | Key point limit | 60,000 |
| Align Photos | Tie point limit | 0 (unlimited) |
| Optimize Camera Alignment | General | f, k1, k2, k3, cx, cy, p1, p2 |
| Optimize Camera Alignment | Advanced | Fit additional corrections |
| Build Dense Cloud | Quality | Mid |
| Build Dense Cloud | Depth filtering | Aggressive |
| Build DEM | Type | Geographic Lambert 93 |
| Build DEM | Source data | Dense cloud |
| Build DEM | Resolution (m) | 0.027 |
| Build Ortho-mosaic | Surface | DEM |
| Build Ortho-mosaic | Pixel size (m) | 0.007 |
| Build Ortho-mosaic | Refine seamlines | yes |
| Metashape Reconstruction (R) | UAV Flights Used | GNSS Mode | GCP Used for Alignment | Camera Optimization |
|---|---|---|---|---|
| R_1 | f1 | D-RTK2 | 0 | yes |
| R_4 | f4 | D-RTK2 | 0 | yes |
| R_5 | f5 | D-RTK2 | 0 | yes |
| R_6 | f6 | TERIA | 0 | yes |
| R_7 | f7 | GNSS | 0 | yes |
| R_7_ppk | f7 | GNSS + PPK | 0 | yes |
| R_1_1gcp | f1 | D-RTK2 | 1 | yes |
| R_1_3gcp | f1 | D-RTK2 | 3 | yes |
| R_1_17gcp | f1 | D-RTK2 | 17 | yes |
| R_1_4 | f1 + f4 | D-RTK2 | 0 | yes |
| R_1_5 | f1 + f5 | D-RTK2 | 0 | yes |
| R_1_4_5 | f1 + f4 + f5 | D-RTK2 | 0 | yes |
| Mode | Positions Number | ME XL93 m | ME YL93 m | ME ZL93 m | RMSE XL93 m | RMSE YL93 m | VE ZL93 m | HE Distance m |
|---|---|---|---|---|---|---|---|---|
| tripod | 13 | −0.010 | −0.004 | −0.016 | 0.0097 | 0.0043 | 0.016 | 0.011 |
| pole | 32 | −0.030 | −0.030 | −0.041 | 0.0313 | 0.0306 | 0.042 | 0.043 |
| Dir | ME XL93 m | ME YL93 m | ME ZL93 m | Pitch avg ° | Yaw avg ° | Roll avg ° | RMSE XL93 m | RMSE YL93 m | VE ZL93 m | HE Distance m |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −0.003 | −0.006 | 0.004 | −0.28 | −161 | −0.20 | 0.003 | 0.006 | 0.006 | 0.006 |
| 2 | −0.004 | 0.000 | −0.005 | 0.01 | −110 | 0.11 | 0.004 | 0.004 | 0.007 | 0.004 |
| 3 | −0.001 | −0.003 | −0.003 | 0.00 | −72 | 0.58 | 0.001 | 0.003 | 0.007 | 0.003 |
| 4 | 0.006 | −0.002 | −0.008 | −0.30 | −20 | 1.00 | 0.006 | 0.003 | 0.010 | 0.007 |
| 5 | 0.010 | −0.001 | 0.003 | −0.70 | 15 | 1.10 | 0.011 | 0.002 | 0.005 | 0.011 |
| 6 | 0.007 | −0.010 | 0.000 | −1.20 | 65 | 0.67 | 0.007 | 0.010 | 0.004 | 0.012 |
| 7 | −0.001 | −0.011 | 0.002 | −1.20 | 104 | 0.20 | 0.002 | 0.011 | 0.004 | 0.011 |
| 8 | −0.002 | −0.010 | −0.002 | −0.68 | 166 | −0.30 | 0.003 | 0.010 | 0.005 | 0.010 |
| avg | 0.002 | −0.005 | −0.001 | −0.54 | −1.77 | 0.40 | 0.005 | 0.006 | 0.006 | 0.008 |
| R | Cameras Number | Sparse Cloud Points | Dense Cloud Points | Ortho-Mosaic Size pixels | Ortho-Mosaic Resolution m | MNS Size Pixels | MNS Resolution m |
|---|---|---|---|---|---|---|---|
| R_1 | 168 | 291,514 | 25,536,868 | 17,116 × 19,046 | 0.007 | 5217 × 5955 | 0.027 |
| R_4 | 116 | 189,291 | 19,547,225 | 14,435 × 17,536 | 0.007 | 4093 × 5103 | 0.028 |
| R_6 | 109 | 182,361 | 17,295,530 | 14,633 × 17,119 | 0.007 | 4079 × 5010 | 0.027 |
| R_5 | 35 | 65,611 | 7,811,874 | 9876 × 12,272 | 0.011 | 2644 × 3462 | 0.043 |
| R_7 | 147 | 266,433 | 22,460,812 | 15,146 × 18,520 | 0.007 | 4286 × 5469 | 0.027 |
| R_7_ppk | 147 | 266,698 | 22,575,332 | 15,446 × 19,004 | 0.007 | 4279 × 5464 | 0.027 |
| R_1_1gcp | 168 | 291,637 | 25,507,163 | 17,113 × 19,043 | 0.007 | 5217 × 5954 | 0.027 |
| R_1_3gcp | 168 | 312,033 | 25,296,142 | 11,981 × 13,331 | 0.007 | 5139 × 5905 | 0.027 |
| R_1_17gcp | 168 | 312,033 | 25,296,142 | 11,981 × 13,331 | 0.010 | 5139 × 5905 | 0.027 |
| R_1_4 | 284 | 669,304 | 28,055,902 | 16,745 × 18,910 | 0.007 | 4610 × 5386 | 0.027 |
| R_1_5 | 203 | 365,795 | 21,569,171 | 17,320 × 19,787 | 0.007 | 4675 × 5404 | 0.029 |
| R_1_4_5 | 319 | 745,453 | 25,554,817 | 16,981 × 19,165 | 0.007 | 4388 × 5120 | 0.029 |
| R | GNSS Mode | HE Mean | HE sd | HE Min | HE Max | VE Mean | VE sd | VE Min | VE Max |
|---|---|---|---|---|---|---|---|---|---|
| R_1 | D-RTK2 | 0.012 | 0.006 | 0.002 | 0.021 | 0.029 | 0.018 | 0.000 | 0.064 |
| R_4 | D-RTK2 | 0.012 | 0.005 | 0.004 | 0.021 | 0.023 | 0.019 | 0.001 | 0.067 |
| R_5 | D-RTK2 | 0.016 | 0.007 | 0.004 | 0.028 | 0.067 | 0.028 | 0.025 | 0.12 |
| R_6 | TERIA | 0.011 | 0.005 | 0.001 | 0.022 | 0.032 | 0.019 | 0.004 | 0.064 |
| R_7 | GNSS | 0.351 | 0.162 | 0.059 | 0.709 | 1.043 | 0.129 | 0.735 | 1.192 |
| R_7_ppk | GNSS PPK | 0.023 | 0.007 | 0.008 | 0.035 | 0.097 | 0.029 | 0.050 | 0.148 |
| R_1_1gcp | D-RTK2 | 0.012 | 0.006 | 0.002 | 0.021 | 0.020 | 0.016 | 0.002 | 0.056 |
| R_1_3gcp | D-RTK2 | 0.011 | 0.006 | 0.002 | 0.021 | 0.017 | 0.014 | 0.001 | 0.049 |
| R_1_17gcp | D-RTK2 | 0.011 | 0.005 | 0.001 | 0.021 | 0.017 | 0.014 | 0.002 | 0.047 |
| R_1_4 | D-RTK2 | 0.012 | 0.006 | 0.002 | 0.021 | 0.034 | 0.021 | 0.000 | 0.074 |
| R_1_5 | D-RTK2 | 0.012 | 0.006 | 0.002 | 0.021 | 0.020 | 0.014 | 0.001 | 0.045 |
| R_1_4_5 | D-RTK2 | 0.013 | 0.006 | 0.003 | 0.021 | 0.021 | 0.013 | 0.003 | 0.050 |
| R | GNSS Mode | HE Mean | HE sd | HE Min | HE Max | % HE <5 cm | % HE 5–10 cm | % HE >10 cm |
|---|---|---|---|---|---|---|---|---|
| R_1 | D-RTK2 | 0.019 | 0.030 | 0.000 | 0.152 | 86 | 11 | 3 |
| R_4 | D-RTK2 | 0.030 | 0.044 | 0.000 | 0.264 | 87 | 10 | 3 |
| R_5 | D-RTK2 | 0.032 | 0.034 | 0.000 | 0.176 | 84 | 11 | 4 |
| R_6 | TERIA | 0.040 | 0.035 | 0.000 | 0.163 | 69 | 26 | 6 |
| R_7 | GNSS | 0.257 | 0.055 | 0.065 | 0.391 | 0 | 3 | 97 |
| R_7_ppk | GNSS PPK | 0.054 | 0.052 | 0.000 | 0.185 | 60 | 20 | 20 |
| R_1_1gcp | D-RTK2 | 0.020 | 0.029 | 0.000 | 0.172 | 90 | 7 | 3 |
| R_1_3gcp | D-RTK2 | 0.020 | 0.028 | 0.000 | 0.148 | 86 | 11 | 3 |
| R_1_17gcp | D-RTK2 | 0.024 | 0.034 | 0.000 | 0.182 | 86 | 10 | 4 |
| R_1_4 | D-RTK2 | 0.025 | 0.031 | 0.000 | 0.157 | 81 | 16 | 3 |
| R_1_5 | D-RTK2 | 0.026 | 0.029 | 0.000 | 0.152 | 83 | 16 | 1 |
| R_1_4_5 | D-RTK2 | 0.027 | 0.029 | 0.000 | 0.152 | 83 | 14 | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gilliot, J.-M.; Hadjar, D.; Michelin, J. Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring. Remote Sens. 2022, 14, 2391. https://doi.org/10.3390/rs14102391
Gilliot J-M, Hadjar D, Michelin J. Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring. Remote Sensing. 2022; 14(10):2391. https://doi.org/10.3390/rs14102391
Chicago/Turabian StyleGilliot, Jean-Marc, Dalila Hadjar, and Joël Michelin. 2022. "Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring" Remote Sensing 14, no. 10: 2391. https://doi.org/10.3390/rs14102391
APA StyleGilliot, J.-M., Hadjar, D., & Michelin, J. (2022). Potential of Ultra-High-Resolution UAV Images with Centimeter GNSS Positioning for Plant Scale Crop Monitoring. Remote Sensing, 14(10), 2391. https://doi.org/10.3390/rs14102391