
Numerical Weather Predictions and Re-Analysis as Input for Lidar Inversions: Assessment of the Impact on Optical Products

 , , ,
, , ,  , ,
, ,
Abstract
:1. Introduction
2. Datasets
2.1. Lidar Measurements
2.2. ERA5_Reanalysis Atmospheric Model from ECMWF
2.3. IFS_ Forecast Atmospheric Model from ECMWF
2.4. GDAS_ Forecast Atmospheric Model from NOAA
- ERA5. This is the first choice as, in general, model re-analyses are expected to be more accurate than forecasts.
- IFS_ECMWF. For all cases where ERA5 model data are not available (because they are missing for the specific EARLINET station or because they are not yet made available), ECMWF NWP is considered the best alternative, especially for EARLINET NRT data processing.
- GDAS. If neither ERA5 nor IFS_ECMWF are available, the GDAS model data are used. Typically, this option is used to process the lidar data measured by EARLINET stations not belonging to Cloudnet.
3. Methodology
- Consider only lidar signals in the full overlap region. The point which does not belong to the full overlap region will be removed to exclude the influence of the overlap function.
- The signal-to-noise ratio of the optical products (either aerosol extinction or backscatter coefficient) is above the defined threshold. We set the threshold as 5 in this study, i.e., . The signal-to-noise ratio is calculated as:where and are the optical products at wavelength and the corresponding statistical error, respectively. It should be noted that a Monte Carlo technique was used to obtain the statistical error of the products, no matter whether the Raman or the elastic method was used [32].
- The values of the optical products should be well above the minimum value measurable by the lidar. We assume that for all the lidar considered, this condition is verified if m−1 and m−1 sr−1. These values represent the technique detection limits that come from the climatological studies performed at different measurement sites. This criterion is used to exclude the values that fulfil the condition but that are close to the instrumental detection limit.
4. Results
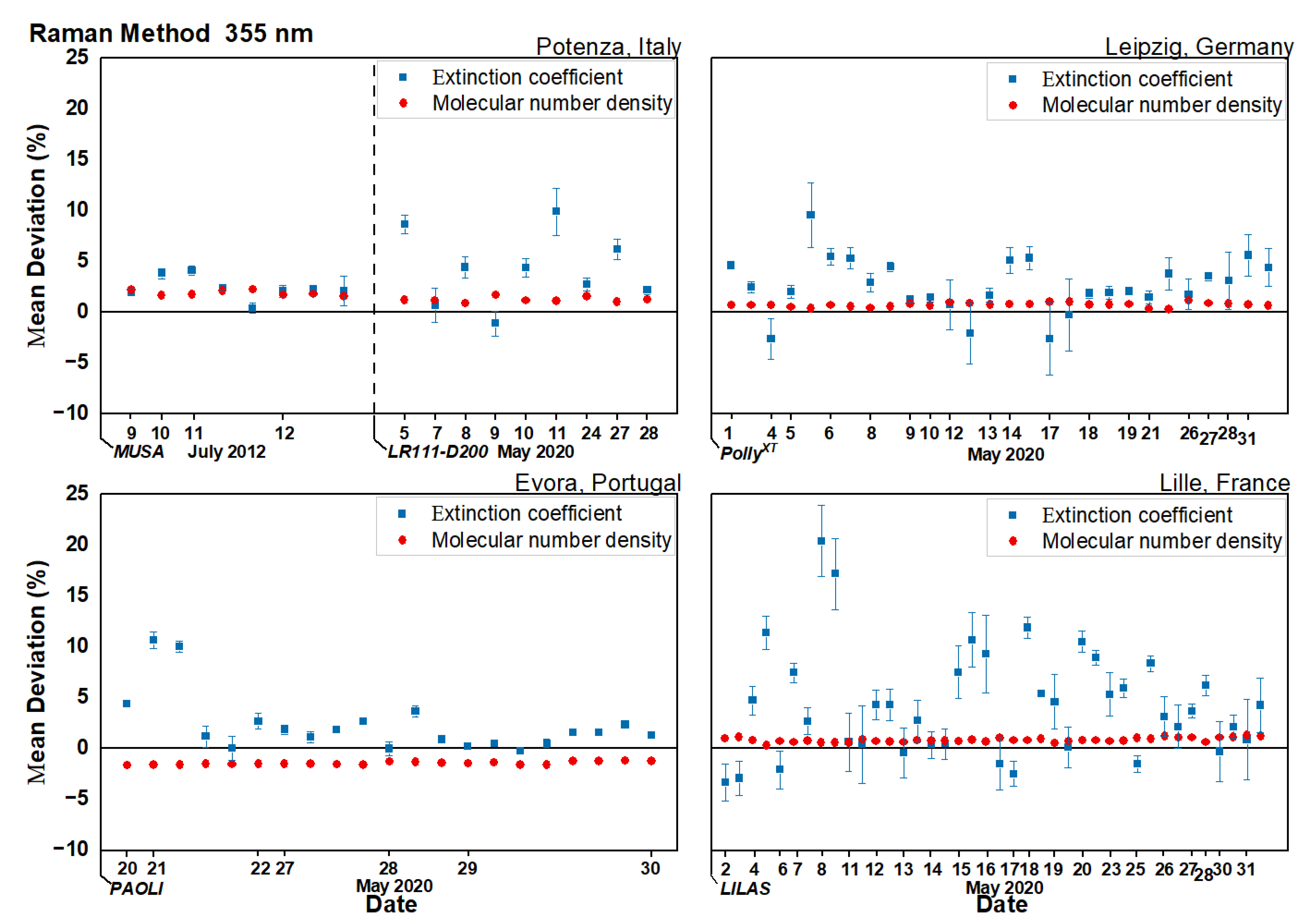
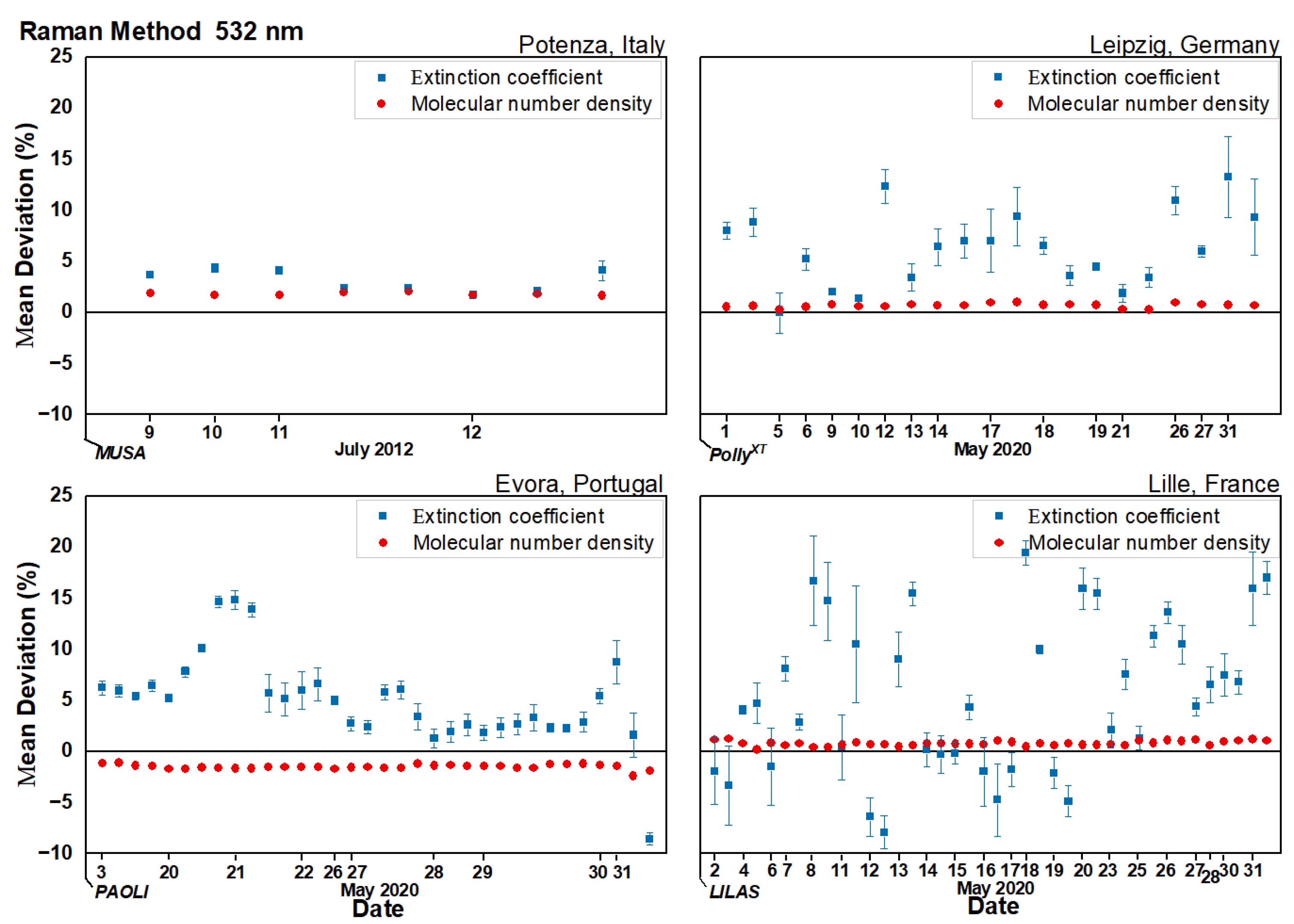
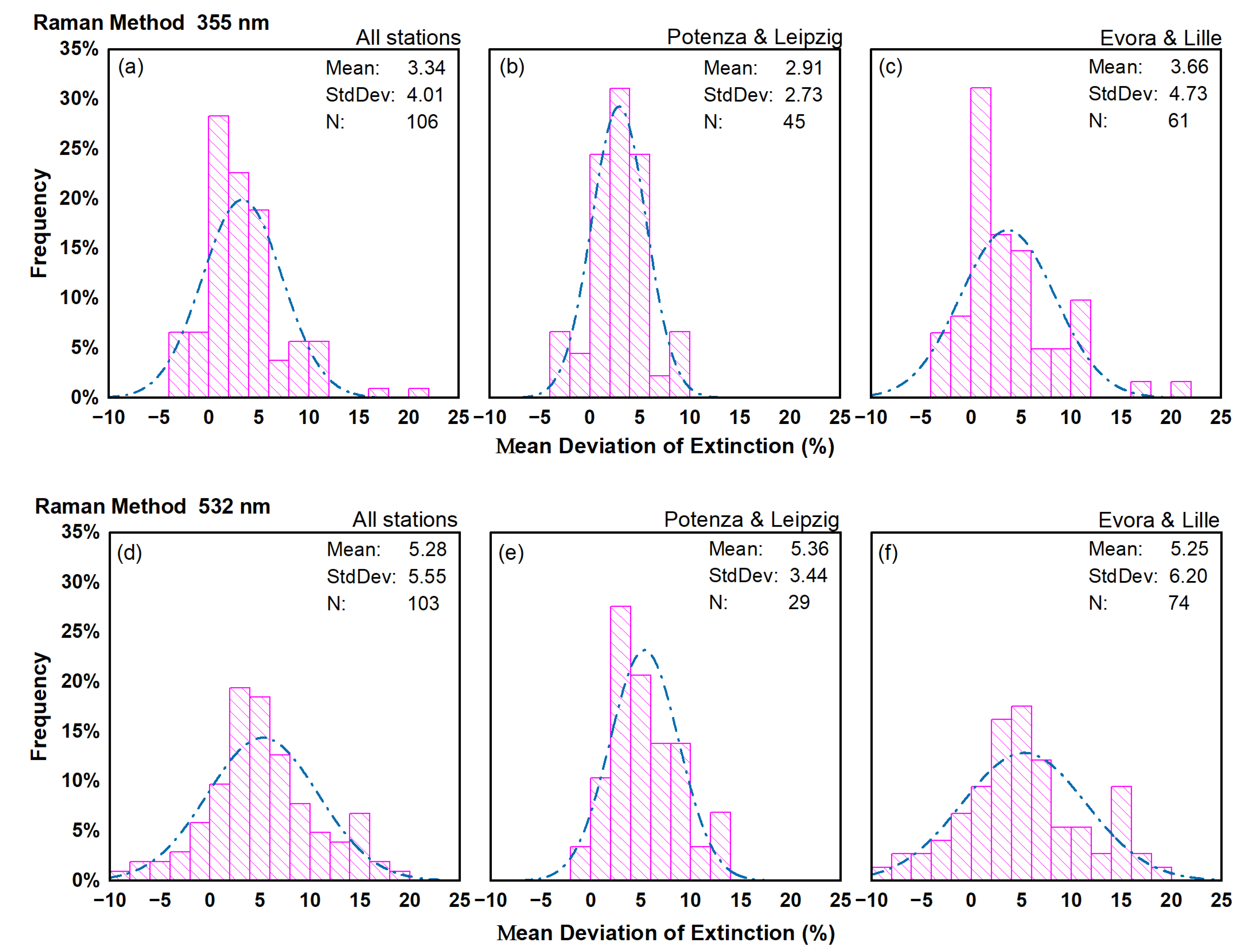
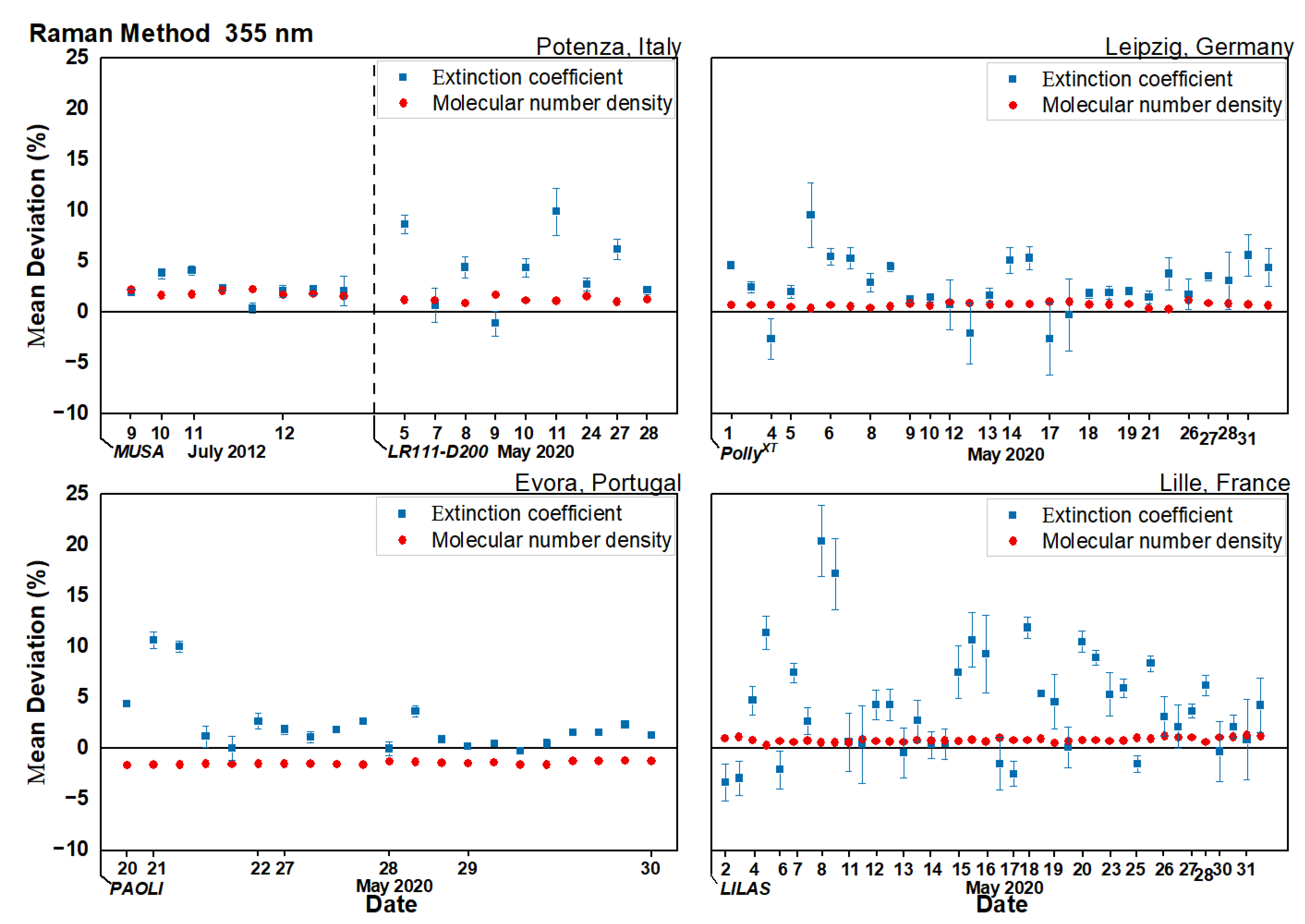
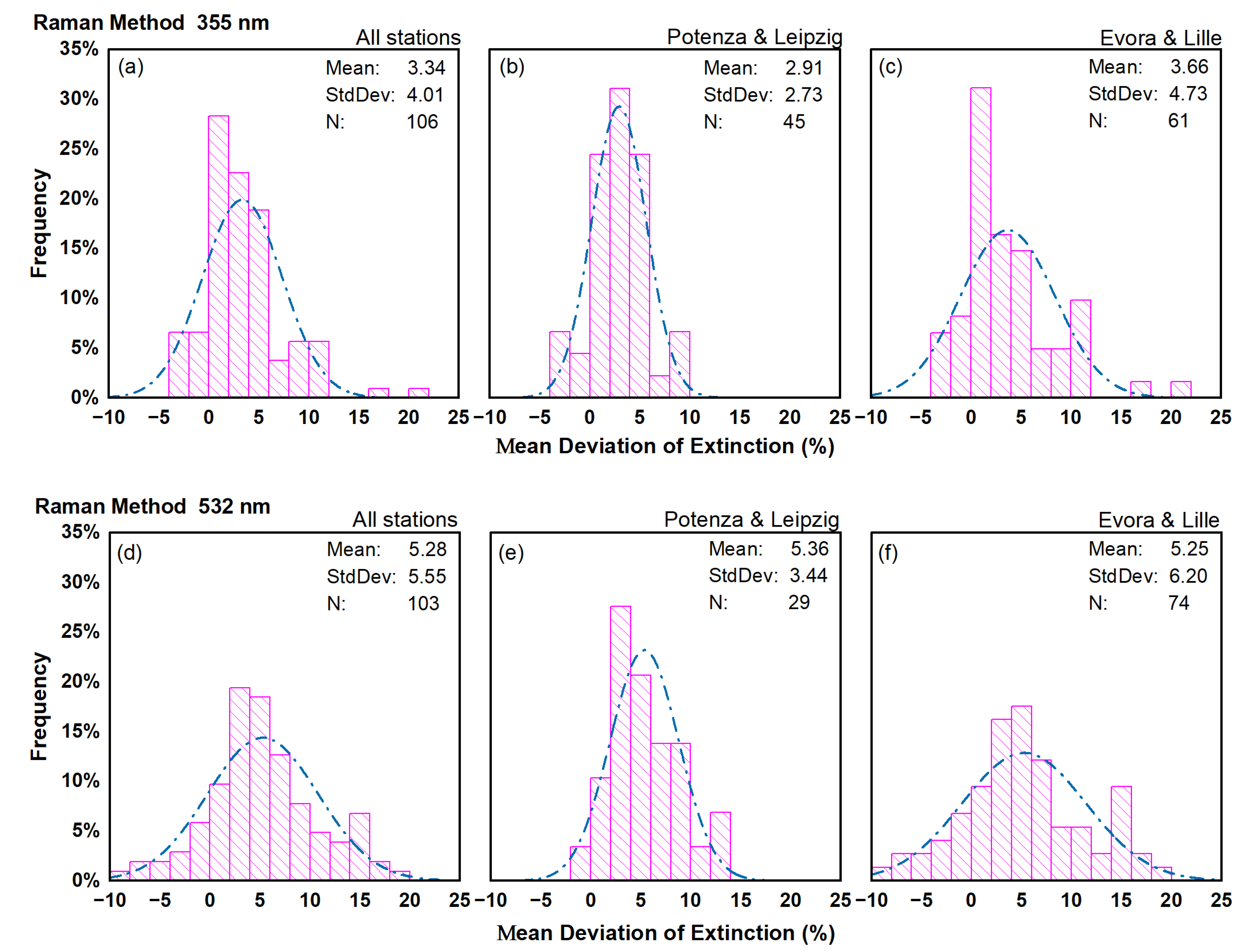
4.1. Deviation of Aerosol Extinction Coefficients
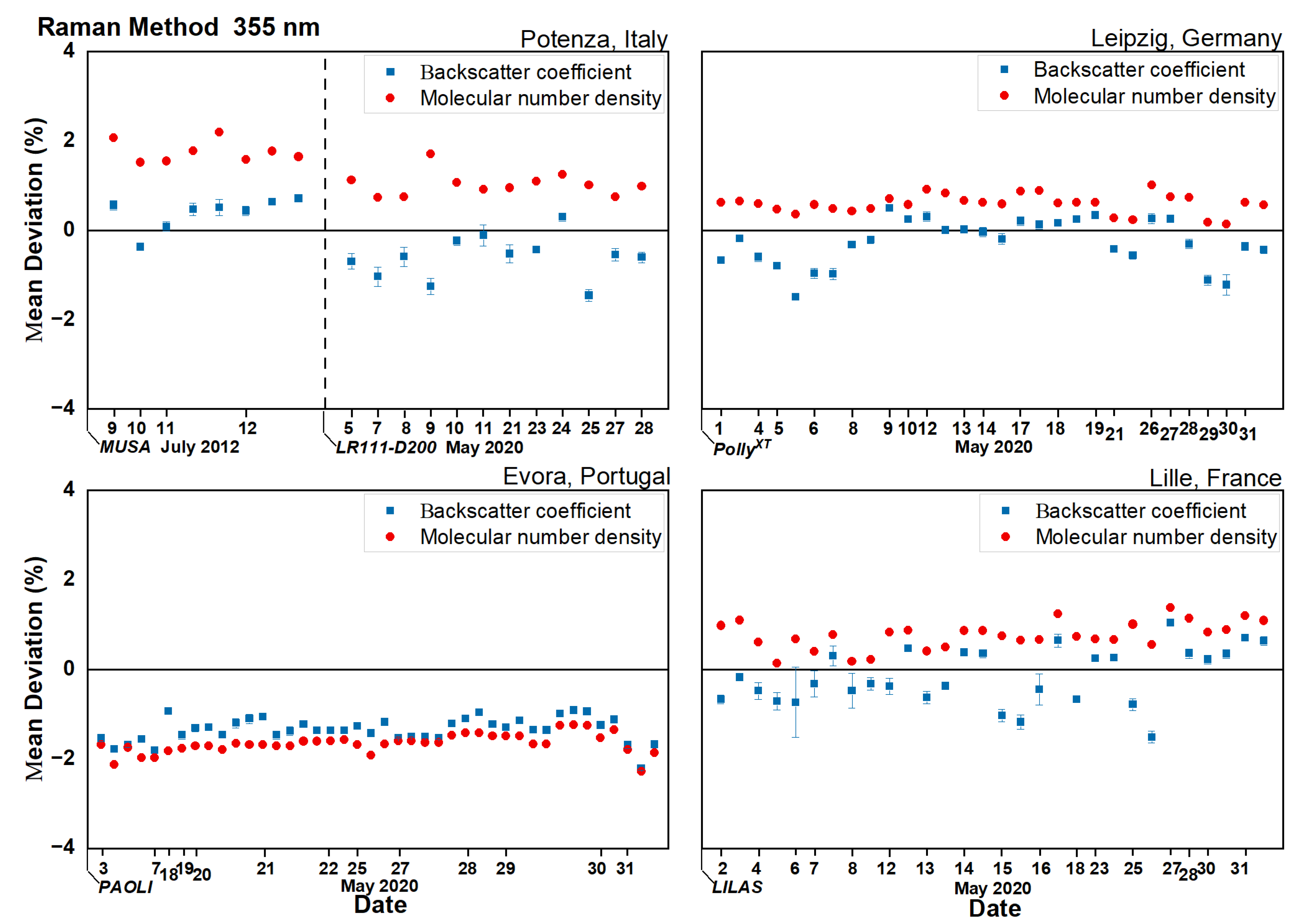
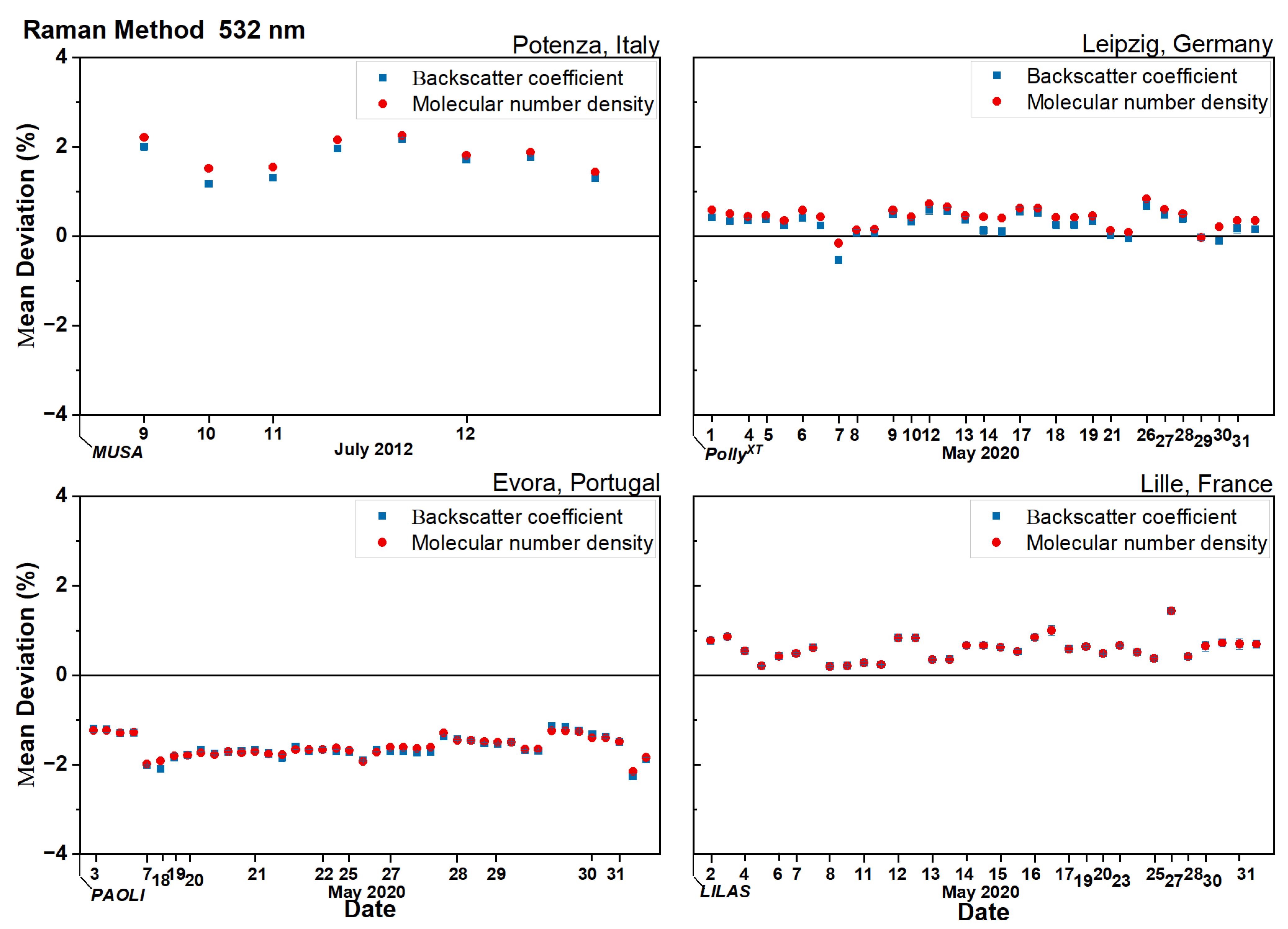
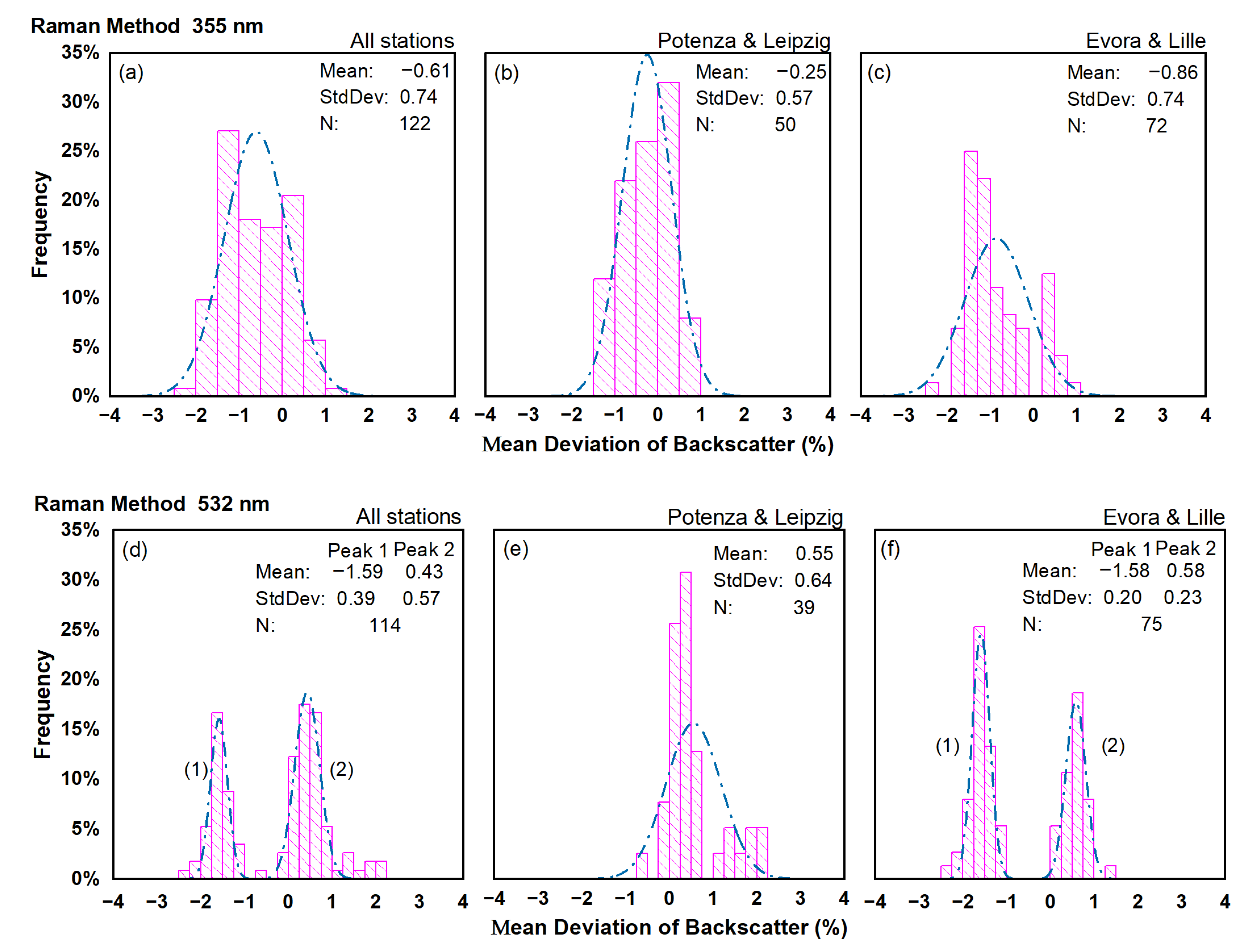
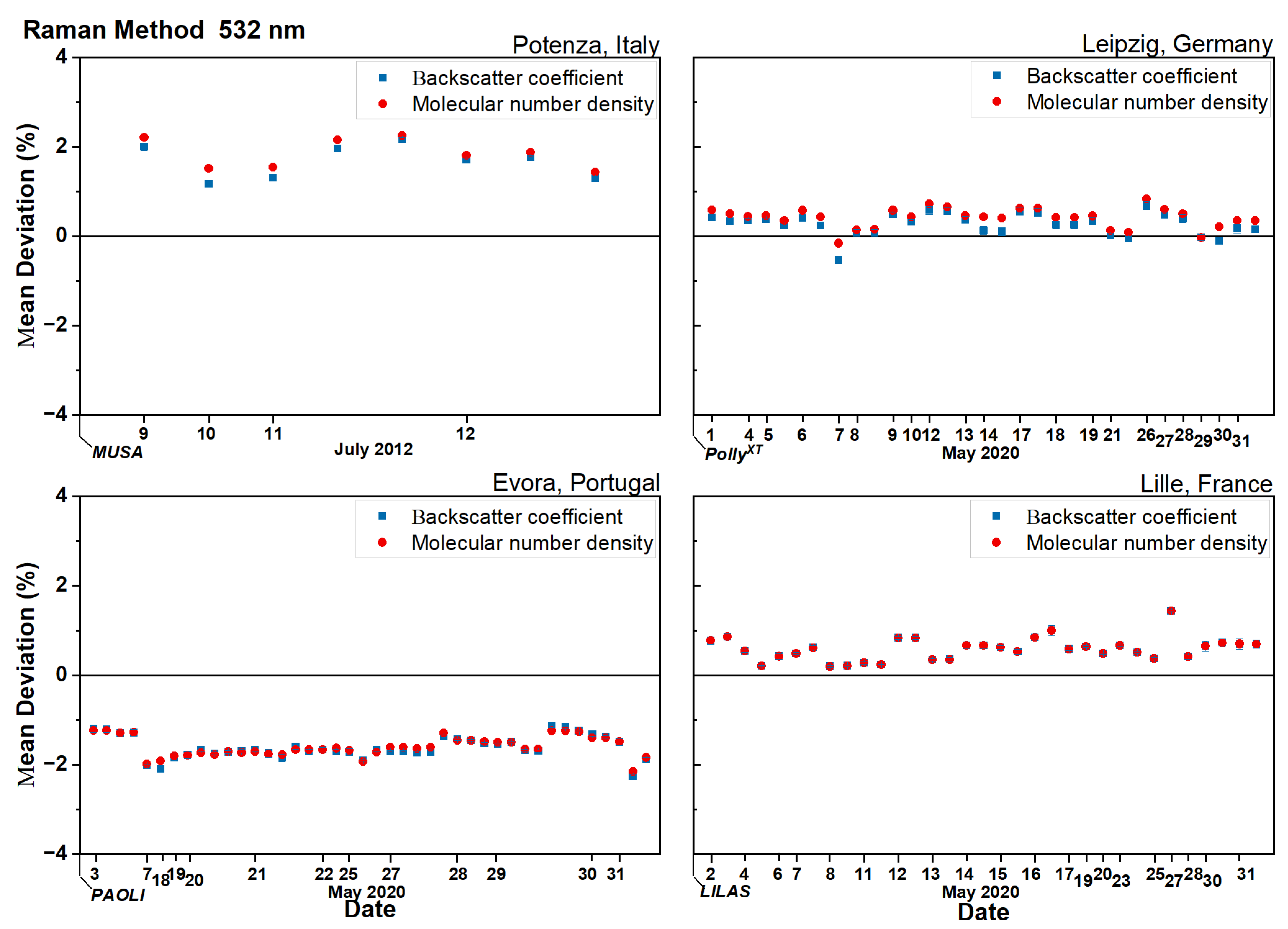
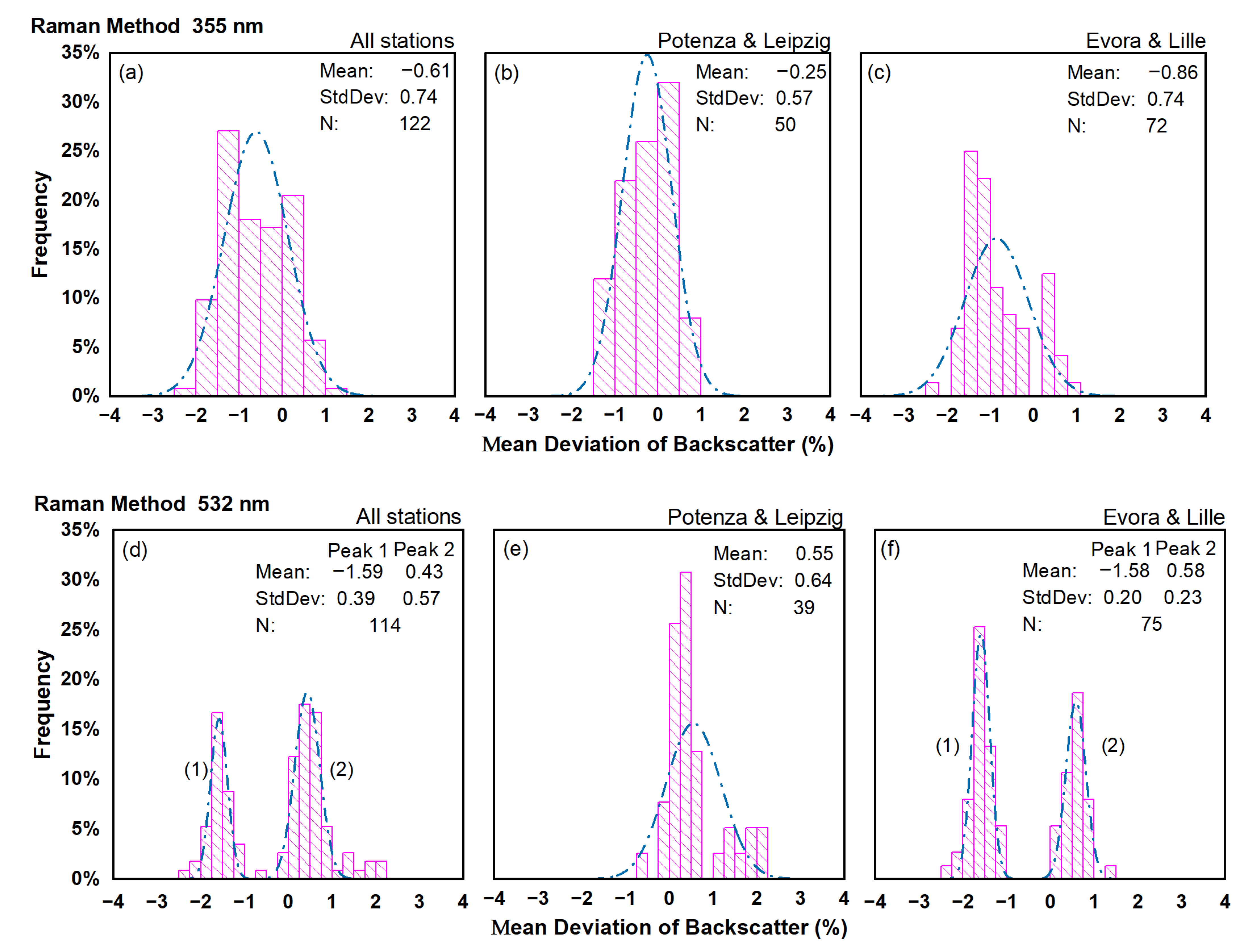
4.2. Deviation of Aerosol Backscatter Coefficients Retrieved with the Raman Method
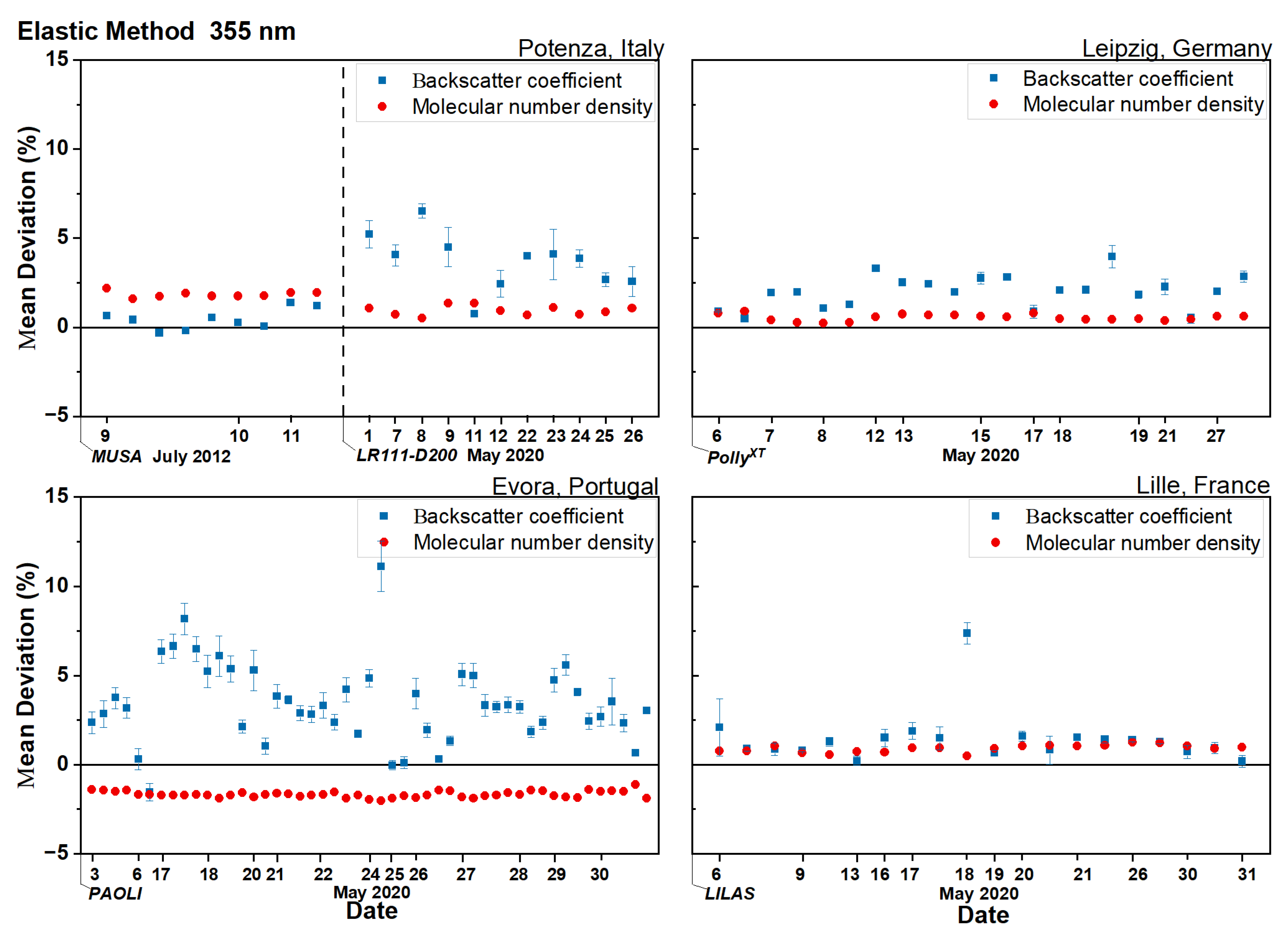
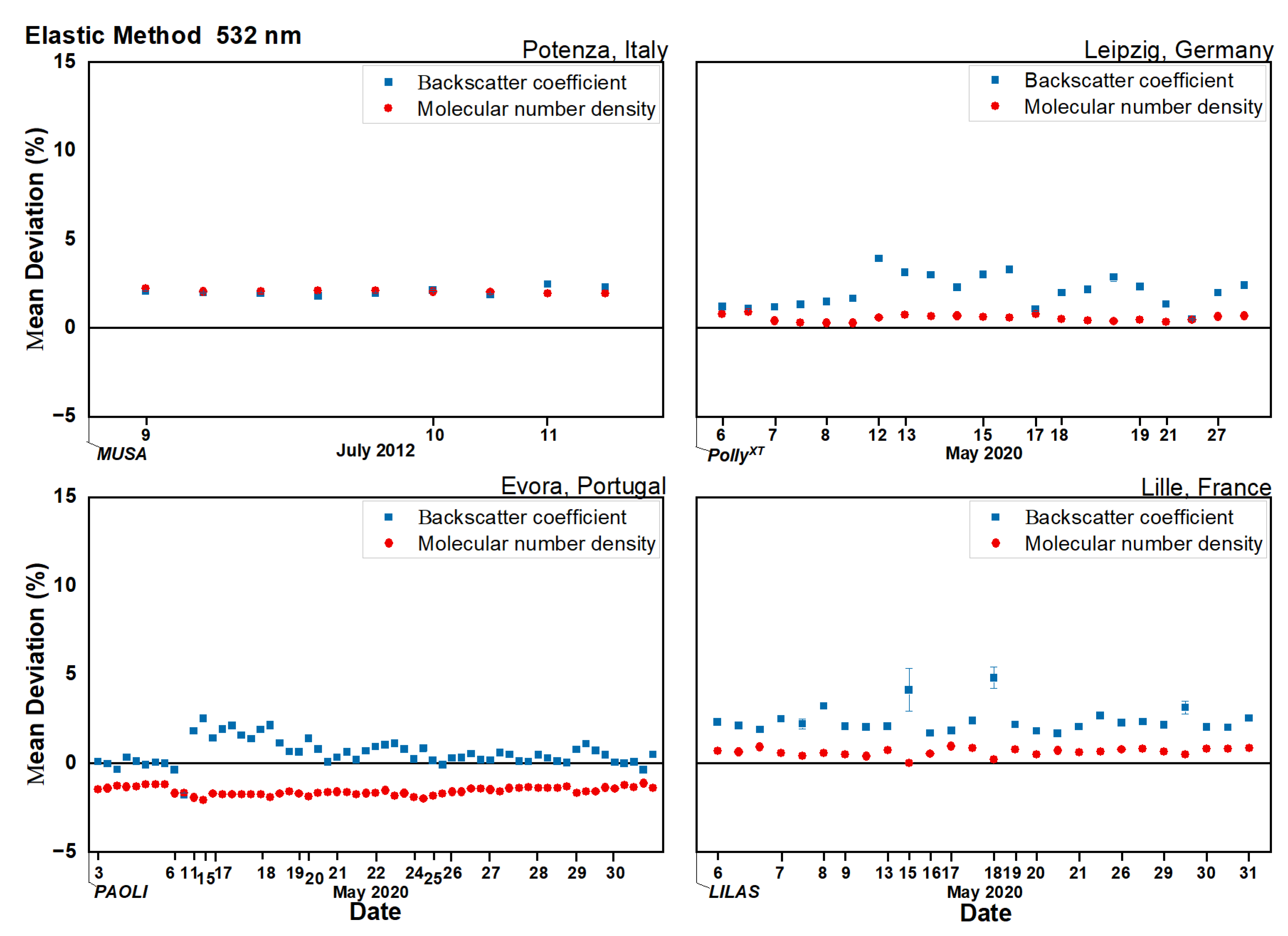
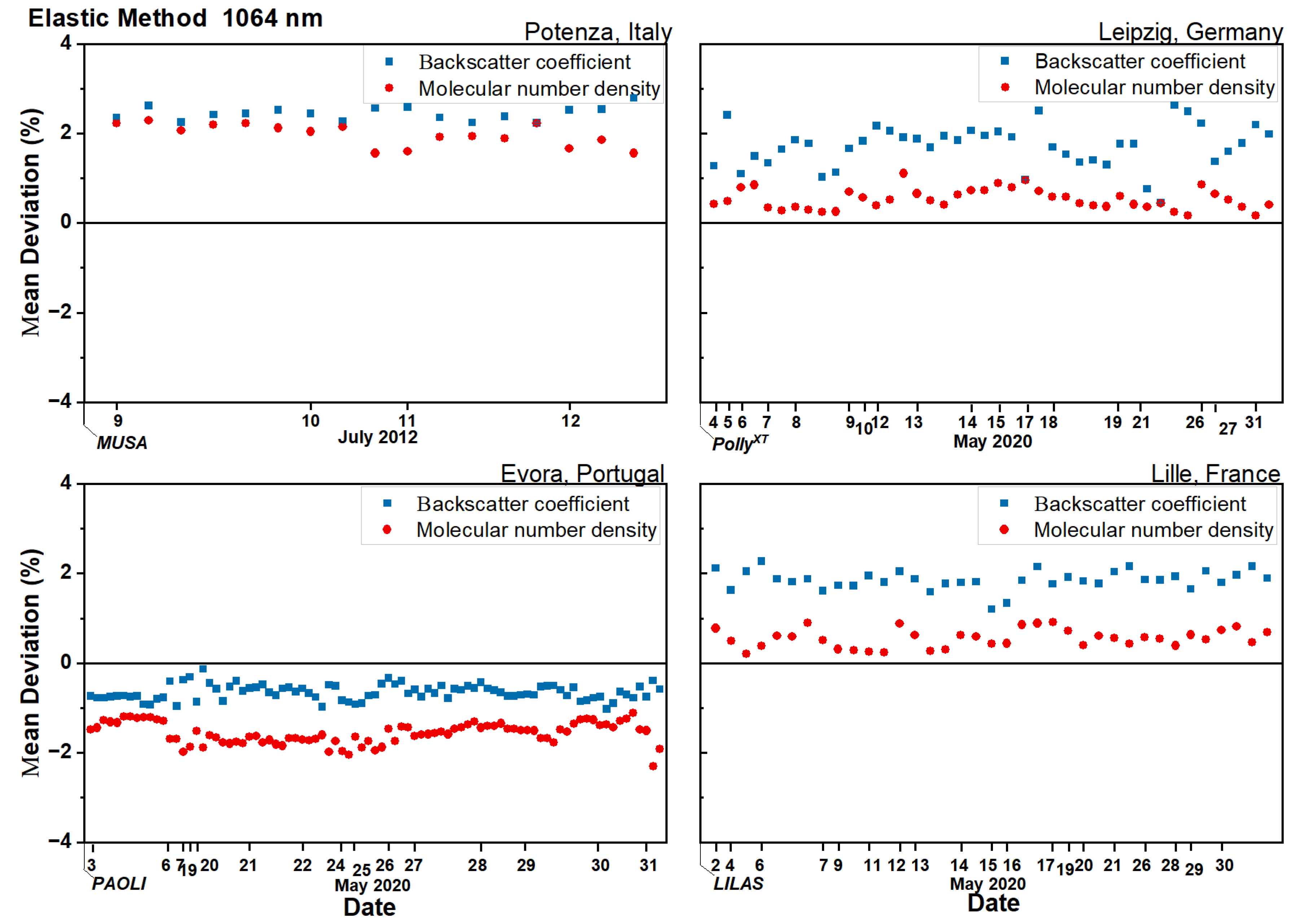
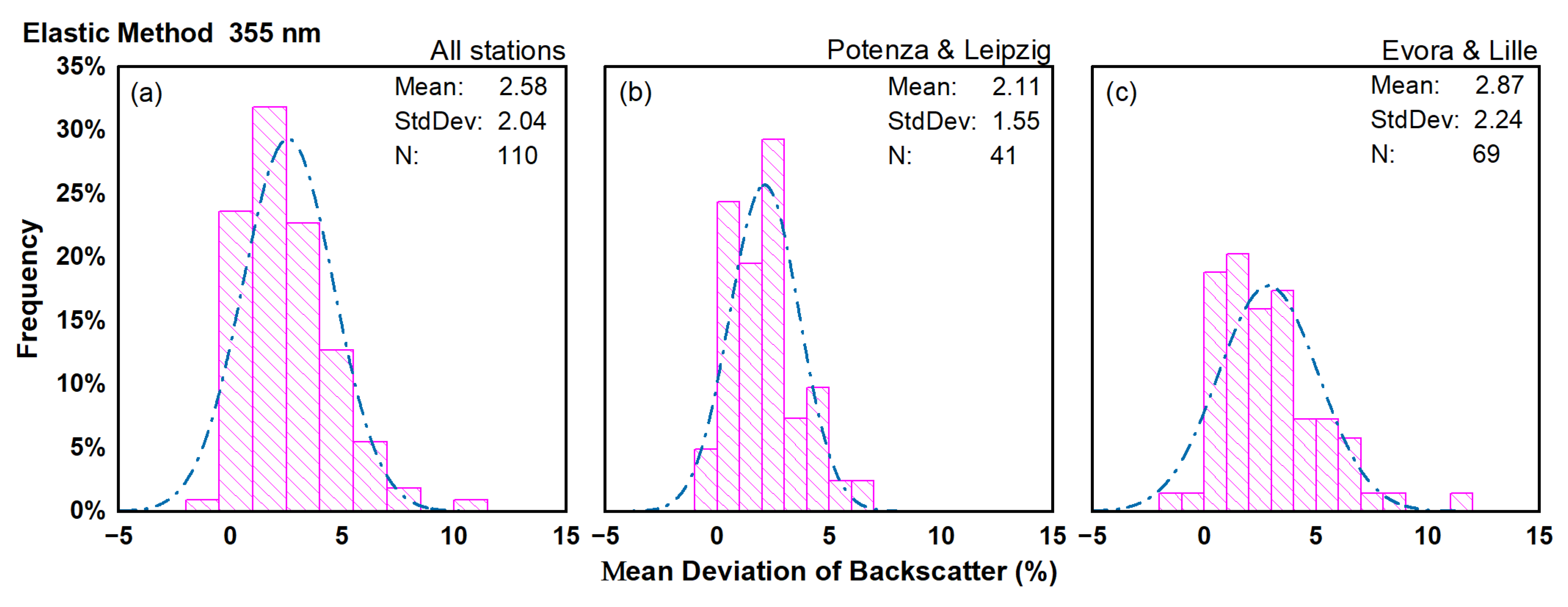
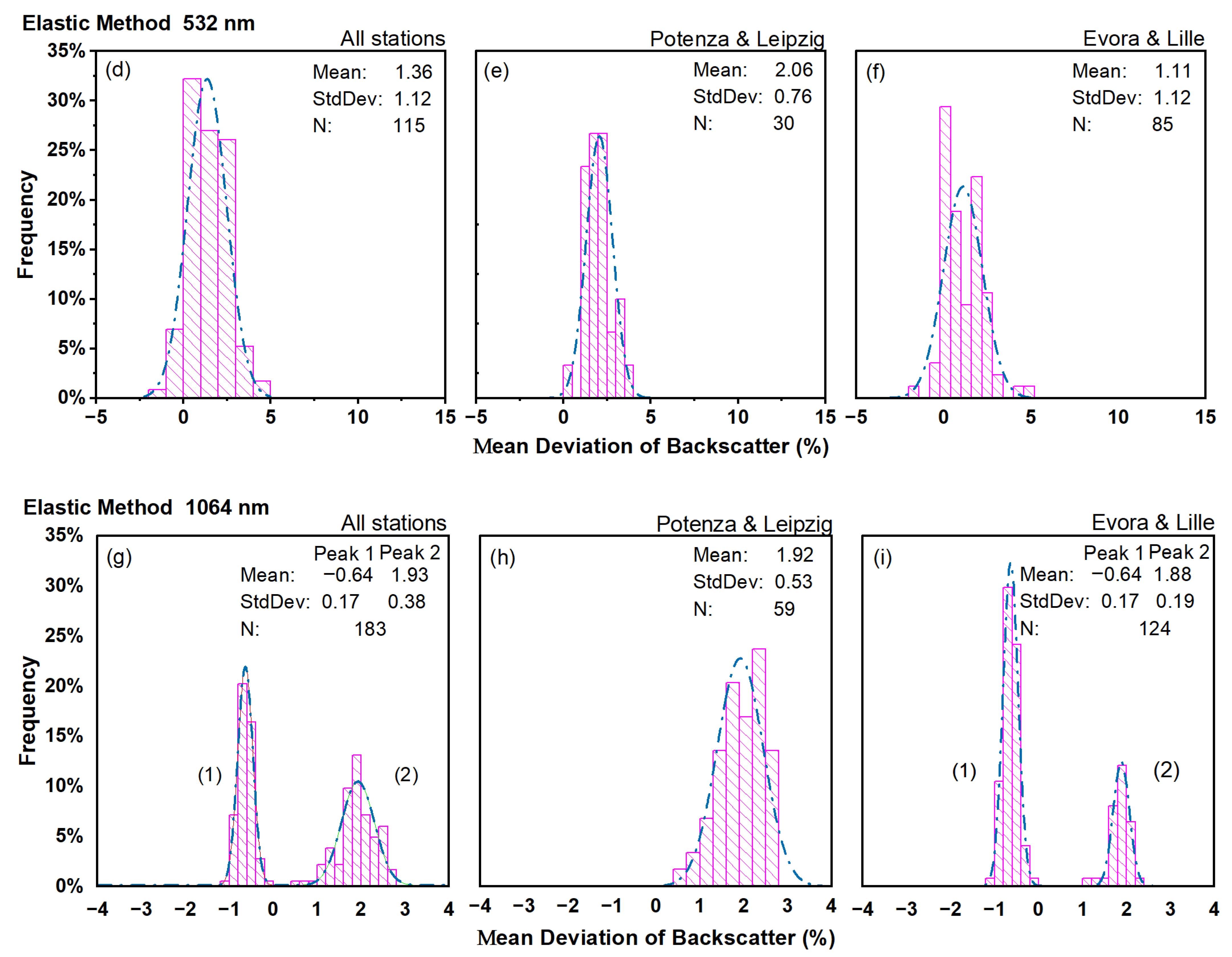
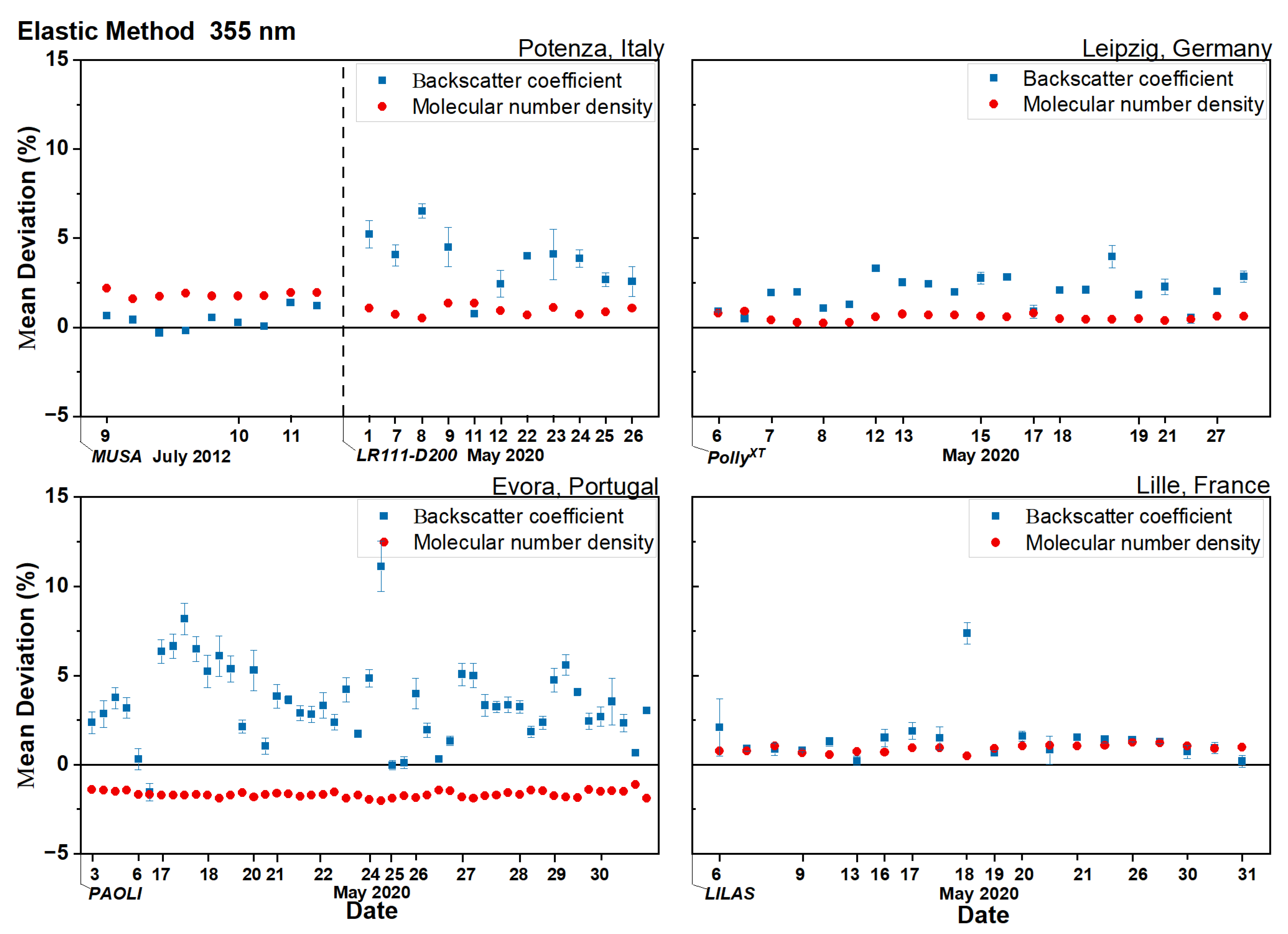
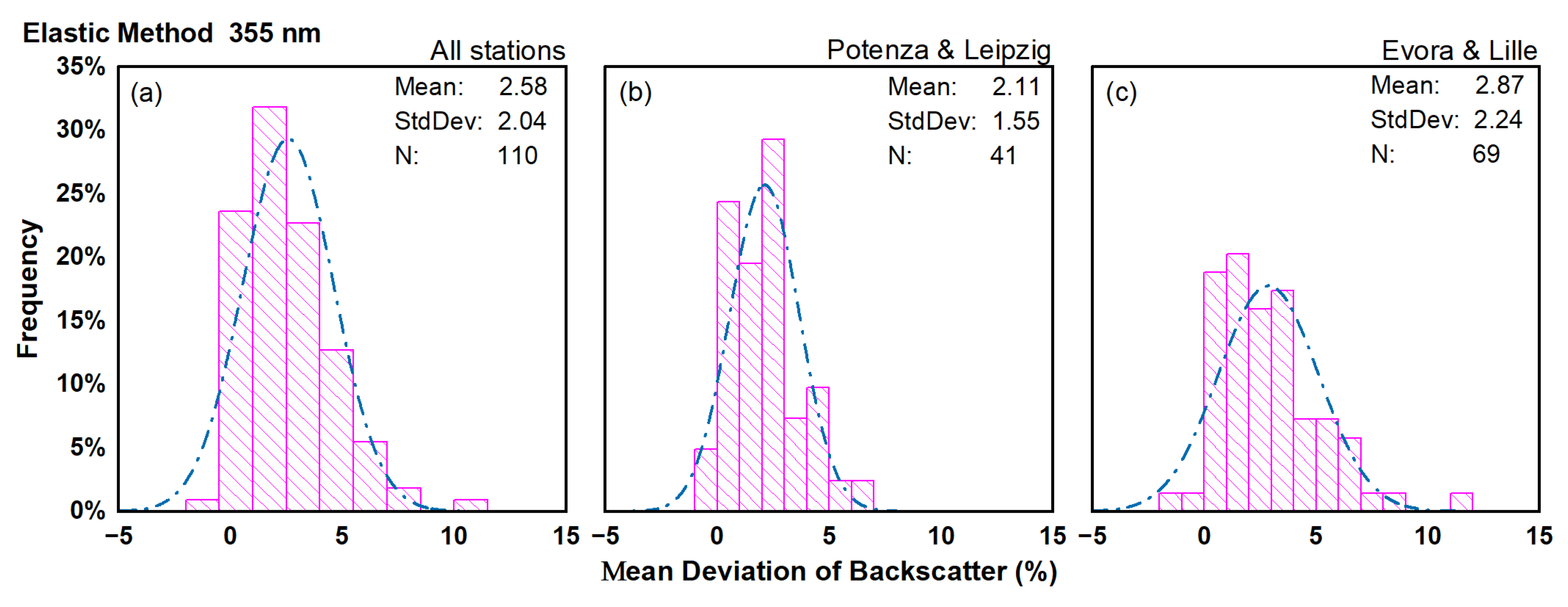
4.3. Deviation of Aerosol Backscatter Coefficient Retrieved with the Elastic Method
5. Discussion
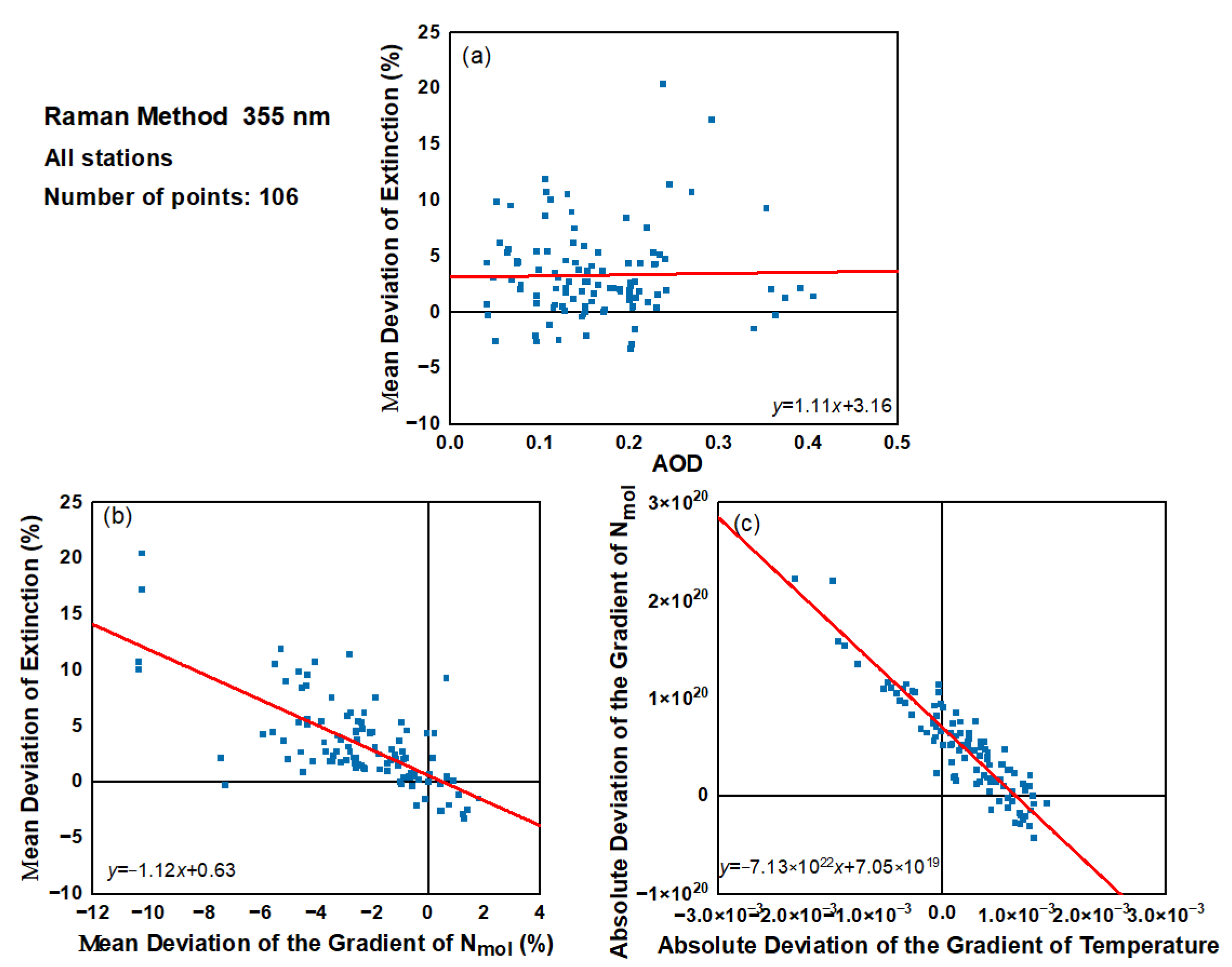
5.1. Aerosol Extinction
5.2. Raman Backscatter
5.3. Elastic Backscatter
6. Conclusions
- (a)
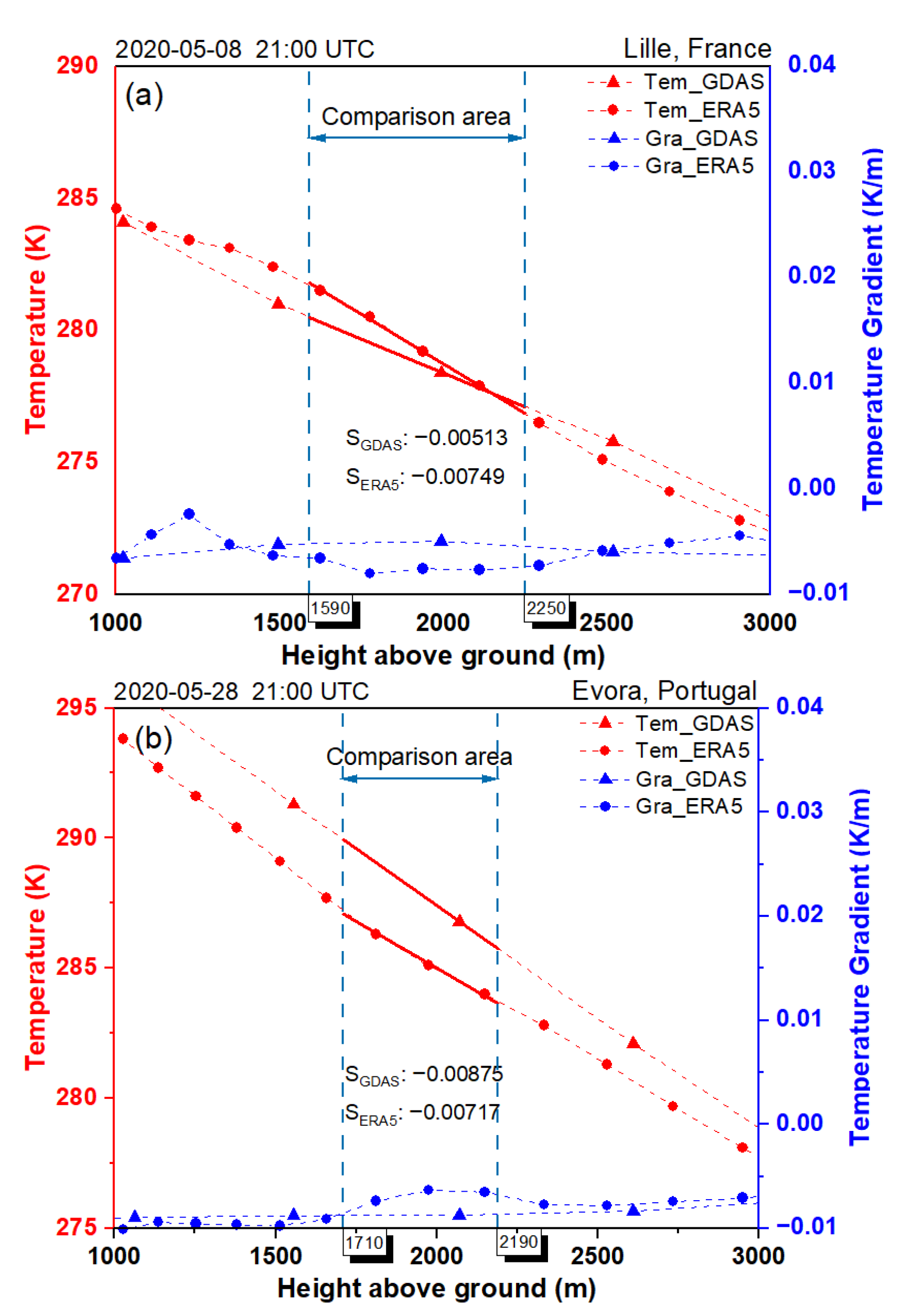
- The use of different model data may have a non-negligible influence on the lidar aerosol extinction retrieval, due mainly to the differences in the gradient of the molecular density profile. This arises from the differences in the vertical temperature gradients, provided by forecast models and reanalysis, instead of the absolute deviation of the molecular number density, which, in general, is quite similar in both forecasts and reanalysis. Even if the average deviation for all cases is small (3.34% at 355 nm and 5.28% at 532 nm), there are a few cases displaying larger deviations. Therefore, the use of a forecast rather than reanalysis in the aerosol extinction retrieval should be carefully considered as it is not possible to exclude high deviations, although this was found very rarely in this study.
- (b)
- The use of forecasts and reanalysis has less influence on the retrieval of the backscatter profiles using both Raman and elastic methods. The quite low deviations found for the aerosol backscatter retrieval suggest that, in general, the forecast model can be used to obtain results with high confidence, especially for the Raman method, which shows a lower deviation (well below ).
- (c)
- The atmosphere aerosol load can affect the deviation of extinction and backscatter, independently of the retrieval algorithm (Raman or elastic). Lower aerosol load conditions will lead to larger deviations in the aerosol products (extinction and backscatter), as also reported in the literature [21,44]. Therefore, under low aerosol load and particularly for the aerosol backscatter retrieved with the elastic method, the usage of the forecast model could introduce not always negligible discrepancies.
- (d)
- According to our study, the use of the IFS_ECMWF model provides, on average, lower deviations (compared to ERA5) in aerosol extinction retrieval than using GDAS. For the aerosol backscatter retrieval, the deviations are almost the same independent of the forecast model, but a larger standard deviation for the frequency distribution of the mean deviation is observed when GDAS is considered.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boucher, O.; Randall, D.; Artaxo, P.; Bretherton, C.; Feingold, G.; Forster, P.; Kerminen, V.-M.; Kondo, Y.; Liao, H.; Lohmann, U.; et al. Clouds and Aerosols. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; pp. 571–658. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Chung, H. Radiative Effects of Airborne Dust on Regional Energy Budgets at the Top of the Atmosphere. J. Appl. Meteo. Climatol. 1992, 31, 223–233. [Google Scholar] [CrossRef] [Green Version]
- Ellison, G.B.; Tuck, A.F.; Vaida, V. Atmospheric processing of organic aerosols. J. Geophys. Res. Atmos. 1999, 104, 11633–11641. [Google Scholar] [CrossRef]
- Izhovkina, N.I.; Artekha, S.N.; Erokhin, N.S.; Mikhailovskaya, L.A. Aerosol, Plasma Vortices and Atmospheric Processes. Izv. Atmos. Ocean. Phys. 2019, 54, 1513–1524. [Google Scholar] [CrossRef]
- Lelieveld, J.; Evans, J.S.; Fnais, M.; Giannadaki, D.; Pozzer, A. The contribution of outdoor air pollution sources to premature mortality on a global scale. Nature 2015, 525, 367–371. [Google Scholar] [CrossRef] [PubMed]
- Contini, D.; Lin, Y.-H.; Hänninen, O.; Viana, M. Contribution of Aerosol Sources to Health Impacts. Atmosphere 2021, 12, 730. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Wang, S.-H.; Min, Q.; Lu, S.; Lin, P.-L.; Lin, N.-H.; Chung, K.-S.; Joseph, E. Aerosol impacts on warm-cloud microphysics and drizzle in a moderately polluted environment. Atmos. Chem. Phys. 2021, 21, 4487–4502. [Google Scholar] [CrossRef]
- Via, M.; Minguillón, M.C.; Reche, C.; Querol, X.; Alastuey, A. Increase in secondary organic aerosol in an urban environment. Atoms. Chem. Phys. 2021, 21, 8323–8339. [Google Scholar] [CrossRef]
- Gultepe, I.; Sharman, R.; Williams, P.D.; Zhou, B.; Ellrod, G.; Minnis, P.; Trier, S.; Griffin, S.; Yum, S.S.; Gharabaghi, B.; et al. A Review of High Impact Weather for Aviation Meteorology. Pure Appl. Geophys. 2019, 176, 1869–1921. [Google Scholar] [CrossRef]
- Burton, S.P.; Ferrare, R.A.; Vaughan, M.A.; Omar, A.H.; Rogers, R.R.; Hostetler, C.A.; Hair, J.W. Aerosol classification from airborne HSRL and comparisons with the CALIPSO vertical feature mask. Atmos. Meas. Tech. 2013, 6, 1397–1412. [Google Scholar] [CrossRef] [Green Version]
- Papagiannopoulos, N.; Mona, L.; Amodeo, A.; D’Amico, G.; Gumà Claramunt, P.; Pappalardo, G.; Alados-Arboledas, L.; Guerrero-Rascado, J.L.; Amiridis, V.; Kokkalis, P.; et al. An automatic observation-based aerosol typing method for earlinet. Atmos. Chem. Phys. 2018, 18, 15879–15901. [Google Scholar] [CrossRef] [Green Version]
- Pappalardo, G.; Amodeo, A.; Apituley, A.; Comeron, A.; Freudenthaler, V.; Linné, H.; Ansmann, A.; Bösenberg, J.; D’Amico, G.; Mattis, I.; et al. EARLINET: Towards an advanced sustainable European aerosol lidar network. Atmos. Meas. Tech. 2014, 7, 2389–2409. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.; Behrendt, A.; Wulfmeyer, V. Elastic-backscatter-lidar-based characterization of the convective boundary layer and investigation of related statistics. Ann. Geophys. 2010, 28, 825–847. [Google Scholar] [CrossRef] [Green Version]
- Fernald, F.G.; Herman, B.M.; Reagan, J.A. Determination of Aerosol Height Distributions by Lidar. J. Appl. Meteorol. Climatol. 1972, 11, 482–489. [Google Scholar] [CrossRef] [Green Version]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef] [PubMed]
- Klett, J.D. Stable analytical inversion solution for processing lidar returns. Appl. Opt. 1981, 20, 211–220. [Google Scholar] [CrossRef] [Green Version]
- Klett, J.D. Lidar inversion with variable backscatter/extinction ratios. Appl. Opt. 1985, 24, 1638–1643. [Google Scholar] [CrossRef]
- Di Girolamo, P.; Ambrico, P.F.; Amodeo, A.; Boselli, A.; Pappalardo, G.; Spinelli, N. Aerosol observations by lidar in the nocturnal boundary layer. Appl. Opt. 1999, 38, 4585–4595. [Google Scholar] [CrossRef]
- Masci, F. Algorithms for the inversion of lidar signals: Rayleigh-Mie measurements in the stratosphere. Ann. Geophys. 1999, 42, 71–83. [Google Scholar] [CrossRef]
- Sasano, Y.; Browell, E.V.; Ismail, S. Error caused by using a constant extinction/backscattering ratio in the lidar solution. Appl. Opt. 1985, 24, 3929–3932. [Google Scholar] [CrossRef]
- Ansmann, A.; Riebesell, M.; Weitkamp, C. Measurement of atmospheric aerosol extinction profiles with a Raman lidar. Opt. Lett. 1990, 15, 746–748. [Google Scholar] [CrossRef]
- Ansmann, A.; Wandinger, U.; Riebesell, M.; Weitkamp, C.; Michaelis, W. Independent measurement of extinction and backscatter profiles in cirrus clouds by using a combined Raman elastic-backscatter lidar. Appl. Opt. 1992, 31, 7113–7131. [Google Scholar] [CrossRef] [PubMed]
- Ferrare, R.A.; Turner, D.D.; Brasseur, L.H.; Feltz, W.F.; Dubovik, O.; Tooman, T.P. Raman lidar measurements of the aerosol extinction-to-backscatter ratio over the Southern Great Plains. J. Geophys. Res. Atmos. 2001, 106, 20333–20347. [Google Scholar] [CrossRef] [Green Version]
- Whiteman, D.N.; Melfi, S.H.; Ferrare, R.A. Raman lidar system for the measurement of water vapor and aerosols in the Earth’s atmosphere. Appl. Opt. 1992, 31, 3068–3082. [Google Scholar] [CrossRef] [PubMed]
- Amodeo, A.; Bösenberg, J.; Ansmann, A.; Balis, D.; Böckmann, C.; Chaikovsky, A.; Comeron, A.; Mitev, V.; Papayannis, A.; Pappalardo, G.; et al. EARLINET: The European Aerosol Lidar Network. Opt. Pur. Apl. 2006, 39, 1–10. Available online: https://dialnet.unirioja.es/servlet/articulo?codigo=6817905 (accessed on 9 May 2022).
- Sicard, M.; D’Amico, G.; Comerón, A.; Mona, L.; Alados-Arboledas, L.; Amodeo, A.; Baars, H.; Baldasano, J.M.; Belegante, L.; Binietoglou, I.; et al. EARLINET: Potential operationality of a research network. Atmos. Meas. Tech. 2015, 8, 4587–4613. [Google Scholar] [CrossRef] [Green Version]
- Matthais, V.; Freudenthaler, V.; Amodeo, A.; Balin, I.; Balis, D.; Bosenberg, J.; Chaikovsky, A.; Chourdakis, G.; Comeron, A.; Delaval, A.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 1. Instruments. Appl. Opt. 2004, 43, 961–976. [Google Scholar] [CrossRef] [PubMed]
- Bockmann, C.; Wandinger, U.; Ansmann, A.; Bosenberg, J.; Amiridis, V.; Boselli, A.; Delaval, A.; Tomasi, F.D.; Frioud, M.; Grigorov, I.V.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 2. Aerosol backscatter algorithms. Appl. Opt. 2004, 43, 977–989. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodel, A.; Pandolfi, M.; Wandinger, U.; Ansmann, A.; Bösenberg, J.; Matthias, V.; Amiridis, V.; De Tomasi, F.; Frioud, M.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 3. Raman lidar algorithm for aerosol extinction, backscatter, and lidar ratio. Appl. Opt. 2004, 43, 5370–5385. [Google Scholar] [CrossRef]
- Wandinger, U.; Freudenthaler, V.; Baars, H.; Amodeo, A.; Engelmann, R.; Mattis, I.; Groß, S.; Pappalardo, G.; Giunta, A.; D’Amico, G.; et al. EARLINET instrument intercomparison campaigns: Overview on strategy and results. Atmos. Meas. Tech. 2016, 9, 1001–1023. [Google Scholar] [CrossRef] [Green Version]
- D’Amico, G.; Amodeo, A.; Mattis, I.; Freudenthaler, V.; Pappalardo, G. EARLINET Single Calculus Chain—Technical—Part 1: Pre-processing of raw lidar data. Atmos. Meas. Tech. 2016, 9, 491–507. [Google Scholar] [CrossRef] [Green Version]
- Mattis, I.; D’Amico, G.; Baars, H.; Amodeo, A.; Madonna, F.; Iarlori, M. EARLINET Single Calculus Chain—Technical—Part 2: Calculation of optical products. Atmos. Meas. Tech. 2016, 9, 3009–3029. [Google Scholar] [CrossRef] [Green Version]
- Wandinger, U.; Nicolae, D.; Pappalardo, G.; Mona, L.; Comerón, A. ACTRIS and its Aerosol Remote Sensing Component. EPJ Web Conf. 2020, 237, 05003. [Google Scholar] [CrossRef]
- D’Amico, G.; Amodeo, A.; Baars, H.; Binietoglou, I.; Freudenthaler, V.; Mattis, I.; Wandinger, U.; Pappalardo, G. EARLINET Single Calculus Chain—Overview on methodology and strategy. Atmos. Meas. Tech. 2015, 8, 4891–4916. [Google Scholar] [CrossRef] [Green Version]
- Madonna, F.; Summa, D.; Di Girolamo, P.; Marra, F.; Wang, Y.; Rosoldi, M. Assessment of Trends and Uncertainties in the Atmospheric Boundary Layer Height Estimated Using Radiosounding Observations over Europe. Atmosphere 2021, 12, 301. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteoeol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Rémy, S.; Kipling, Z.; Flemming, J.; Boucher, O.; Nabat, P.; Michou, M.; Bozzo, A.; Ades, M.; Huijnen, V.; Benedetti, A.; et al. Description and evaluation of the tropospheric aerosol scheme in the European Centre for Medium-Range Weather Forecasts (ECMWF) Integrated Forecasting System (IFS-AER, cycle 45R1). Geosci. Model Dev. 2019, 12, 4627–4659. [Google Scholar] [CrossRef] [Green Version]
- Strube, C.; Preusse, P.; Ern, M.; Riese, M. Propagation paths and source distributions of resolved gravity waves in ECMWF-IFS analysis fields around the southern polar night jet. Atmos. Chem. Phys. 2021, 21, 18641–18668. [Google Scholar] [CrossRef]
- Flemming, J.; Huijnen, V.; Arteta, J.; Bechtold, P.; Beljaars, A.; Blechschmidt, A.M.; Diamantakis, M.; Engelen, R.J.; Gaudel, A.; Inness, A.; et al. Tropospheric chemistry in the Integrated Forecasting System of ECMWF. Geosci. Model Dev. 2015, 8, 975–1003. [Google Scholar] [CrossRef] [Green Version]
- Abreu, P.; Aglietta, M.; Ahlers, M.; Ahn, E.J.; Albuquerque, I.F.M.; Allard, D.; Allekotte, I.; Allen, J.; Allison, P.; Almela, A.; et al. Description of atmospheric conditions at the Pierre Auger Observatory using the Global Data Assimilation System (GDAS). Astropart. Phys. 2012, 35, 591–607. [Google Scholar] [CrossRef] [Green Version]
- Illingworth, A.J.; Hogan, R.J.; O’Connor, E.J.; Bouniol, D.; Delanoë, J.; Pelon, J.; Protat, A.; Brooks, M.E.; Gaussiat, N.; Wilson, D.R.; et al. Cloudnet. Bull. Am. Meteorol. Soc. 2007, 88, 883–898. [Google Scholar] [CrossRef] [Green Version]
- Cooney, J.; Orr, J.; Tomasetti, C. Measurements Separating the Gaseous and Aerosol Components of Laser Atmospheric Backscatter. Nature 1969, 224, 1098–1099. [Google Scholar] [CrossRef]
- Melfi, S.H. Remote Measurements of the Atmosphere Using Raman Scattering. Appl. Opt. 1972, 11, 1605–1610. [Google Scholar] [CrossRef] [PubMed]
- Whiteman, D.N. Examination of the traditional Raman lidar technique. I. Evaluating the temperature-dependent lidar equations. Appl. Opt. 2003, 42, 2571–2592. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lidar Name | Elastic Channel (nm) | Raman Channel (nm) | Institution | Coordinates (Latitude/Longitude) | Altitude (m) | ||||
|---|---|---|---|---|---|---|---|---|---|
| 355 | 532 | 1064 | 387 | 607 | 530 | ||||
| MUSA | √ | √ 1 | √ | √ | √ | CNR-IMAA, Potenza, Italy | 40.6000°N, 15.7200°E | 760 | |
| LR111-D200 | √ 1 | √ | |||||||
| PollyXT | √ 1 | √ 1 | √ | √ | √ | TROPOS, Leipzig, Germany | 51.3500°N, 12.4330°E | 125 | |
| PAOLI | √ | √ | √ | √ | √ | Universidade de Évora, Portugal | 38.5678°N, −7.9115°E | 290 | |
| LILAS | √ 1 | √ 1 | √ 1 | √ | √ | Université de Lille, France | 50.6117°N, 3.1417°E | 60 | |
| Dataset | Horizontal Resolution | Vertical Pressure Levels | Time Resolution |
|---|---|---|---|
| ERA5 | ~31 km | 137 vertical levels from the surface to 0.02 hPa | 1 h |
| IFS_ECMWF 1 | ~9 km | 137 vertical levels from the surface to 0.01 hPa | 1 h |
| IFS_ECMWF 2 | ~16 km | 91 vertical levels from the surface to 0.01 hPa | 1 h |
| GDAS | ~70.7 km | 23 vertical levels from the surface to 20 hPa | 3 h |
| Lidar Name | Raman Method | Elastic Method | |||||
|---|---|---|---|---|---|---|---|
| 355 nm | 532 nm | 355 nm | 532 nm | 1064 nm | |||
| MUSA | 8 | 8 | 8 | 8 | 9 | 9 | 17 |
| LR111-D200 | 9 | 12 | − | − | 11 | − | − |
| PollyXT | 28 | 30 | 21 | 31 | 21 | 21 | 42 |
| PAOLI | 21 | 42 | 34 | 42 | 49 | 59 | 87 |
| LILAS | 40 | 30 | 40 | 33 | 20 | 26 | 37 |
| Total | 106 | 122 | 103 | 114 | 110 | 115 | 183 |
| Lidar Name | 355 nm | 532 nm | ||||||
|---|---|---|---|---|---|---|---|---|
| M_DA 1 (%) | M_DNA 2 (%) | M_SNA 3 (%) | M_AOD 4 | M_DA (%) | M_DNA (%) | M_SNA (%) | M_AOD | |
| MUSA | 2.36 | 1.85 | −1.4 | 0.175 | 3.10 | 1.81 | −1.69 | 0.233 |
| LR111-D200 | 4.22 | 1.2 | −2.34 | 0.111 | − | − | − | − |
| PollyXT | 2.65 | 0.71 | −2.36 | 0.133 | 6.22 | 0.67 | −2.97 | 0.071 |
| PAOLI | 2.34 | −1.44 | −3.12 | 0.168 | 4.99 | −1.53 | −4.89 | 0.098 |
| LILAS | 4.36 | 0.85 | −2.29 | 0.194 | 5.47 | 0.76 | −2.50 | 0.138 |
| Total | 3.34 | 0.46 | −2.41 | 0.164 | 5.28 | 0.07 | −3.32 | 0.118 |
| Model Used | 355 nm | 532 nm | ||||||
|---|---|---|---|---|---|---|---|---|
| M_DA (%) | M_DNA (%) | M_SNA (%) | M_AOD | M_DA (%) | M_DNA (%) | M_SNA (%) | M_AOD | |
| ECMWF/ERA5 | 2.91 | 1.01 | −2.19 | 0.136 | 5.36 | 0.98 | −2.62 | 0.116 |
| GDAS/ERA5 | 3.66 | 0.06 | −2.58 | 0.185 | 5.25 | -0.29 | −3.60 | 0.119 |
| Lidar Name | 355 nm | 532 nm | ||||
|---|---|---|---|---|---|---|
| M_DB 1 (%) | M_DNB 2 (%) | M_AOD | M_DB (%) | M_DNB (%) | M_AOD | |
| MUSA | 0.38 | 1.76 | 0.175 | 1.67 | 1.85 | 0.233 |
| LR111-D200 | −0.60 | 1.03 | 0.088 | − | − | − |
| PollyXT | −0.28 | 0.59 | 0.125 | 0.26 | 0.41 | 0.057 |
| PAOLI | −1.35 | −1.66 | 0.125 | −1.62 | −1.61 | 0.084 |
| LILAS | −0.16 | 0.76 | 0.218 | 0.59 | 0.58 | 0.144 |
| Total | −0.61 | −0.023 | 0.148 | −0.24 | −0.18 | 0.105 |
| Model Used | 355 nm | 532 nm | ||||
|---|---|---|---|---|---|---|
| M_DB (%) | M_DNB (%) | M_AOD | M_DB (%) | M_DNB (%) | M_AOD | |
| ECMWF/ERA5 | −0.25 | 0.88 | 0.124 | 0.55 | 0.70 | 0.093 |
| GDAS/ERA5 | −0.86 | −0.65 | 0.164 | −0.65 | −0.64 | 0.111 |
| Lidar Name | 355 nm | 532 nm | 1064 nm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| M_DB (%) | M_DNB (%) | M_IB 1 (sr−1) | M_DB (%) | M_DNB (%) | M_IB (sr−1) | M_DB (%) | M_DNB (%) | M_IB (sr−1) | |
| MUSA | 0.44 | 1.83 | 0.0055 | 2.06 | 2.05 | 0.0044 | 2.44 | 1.97 | 0.0027 |
| LR111-D200 | 3.70 | 0.94 | 0.0023 | − | − | − | − | − | − |
| PollyXT | 1.99 | 0.53 | 0.0028 | 2.06 | 0.54 | 0.0015 | 1.71 | 0.53 | 0.0008 |
| PAOLI | 3.44 | −1.67 | 0.0023 | 0.55 | −1.59 | 0.0025 | −0.65 | −1.57 | 0.0013 |
| LILAS | 1.45 | 0.91 | 0.0077 | 2.38 | 0.61 | 0.0024 | 1.85 | 0.55 | 0.0010 |
| Total | 2.58 | −0.23 | 0.0036 | 1.36 | −0.42 | 0.0025 | 0.68 | −0.33 | 0.0012 |
| Model Used | 355 nm | 532 nm | 1064 nm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| M_DB (%) | M_DNB (%) | M_IB (sr−1) | M_DB (%) | M_DNB (%) | M_IB (sr−1) | M_DB (%) | M_DNB (%) | M_IB (sr−1) | |
| ECMWF/ERA5 | 2.11 | 0.93 | 0.0033 | 2.06 | 0.99 | 0.0024 | 1.92 | 0.94 | 0.0013 |
| GDAS/ERA5 | 2.87 | −0.93 | 0.0039 | 1.11 | −0.92 | 0.0025 | 0.09 | −0.93 | 0.0012 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Amodeo, A.; O’Connor, E.J.; Baars, H.; Bortoli, D.; Hu, Q.; Sun, D.; D’Amico, G. Numerical Weather Predictions and Re-Analysis as Input for Lidar Inversions: Assessment of the Impact on Optical Products. Remote Sens. 2022, 14, 2342. https://doi.org/10.3390/rs14102342
Wang Y, Amodeo A, O’Connor EJ, Baars H, Bortoli D, Hu Q, Sun D, D’Amico G. Numerical Weather Predictions and Re-Analysis as Input for Lidar Inversions: Assessment of the Impact on Optical Products. Remote Sensing. 2022; 14(10):2342. https://doi.org/10.3390/rs14102342
Chicago/Turabian StyleWang, Yuanzu, Aldo Amodeo, Ewan J. O’Connor, Holger Baars, Daniele Bortoli, Qiaoyun Hu, Dongsong Sun, and Giuseppe D’Amico. 2022. "Numerical Weather Predictions and Re-Analysis as Input for Lidar Inversions: Assessment of the Impact on Optical Products" Remote Sensing 14, no. 10: 2342. https://doi.org/10.3390/rs14102342
APA StyleWang, Y., Amodeo, A., O’Connor, E. J., Baars, H., Bortoli, D., Hu, Q., Sun, D., & D’Amico, G. (2022). Numerical Weather Predictions and Re-Analysis as Input for Lidar Inversions: Assessment of the Impact on Optical Products. Remote Sensing, 14(10), 2342. https://doi.org/10.3390/rs14102342