
SDR-Implemented Passive Bistatic SAR System Using Sentinel-1 Signal and Its Experiment Results


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
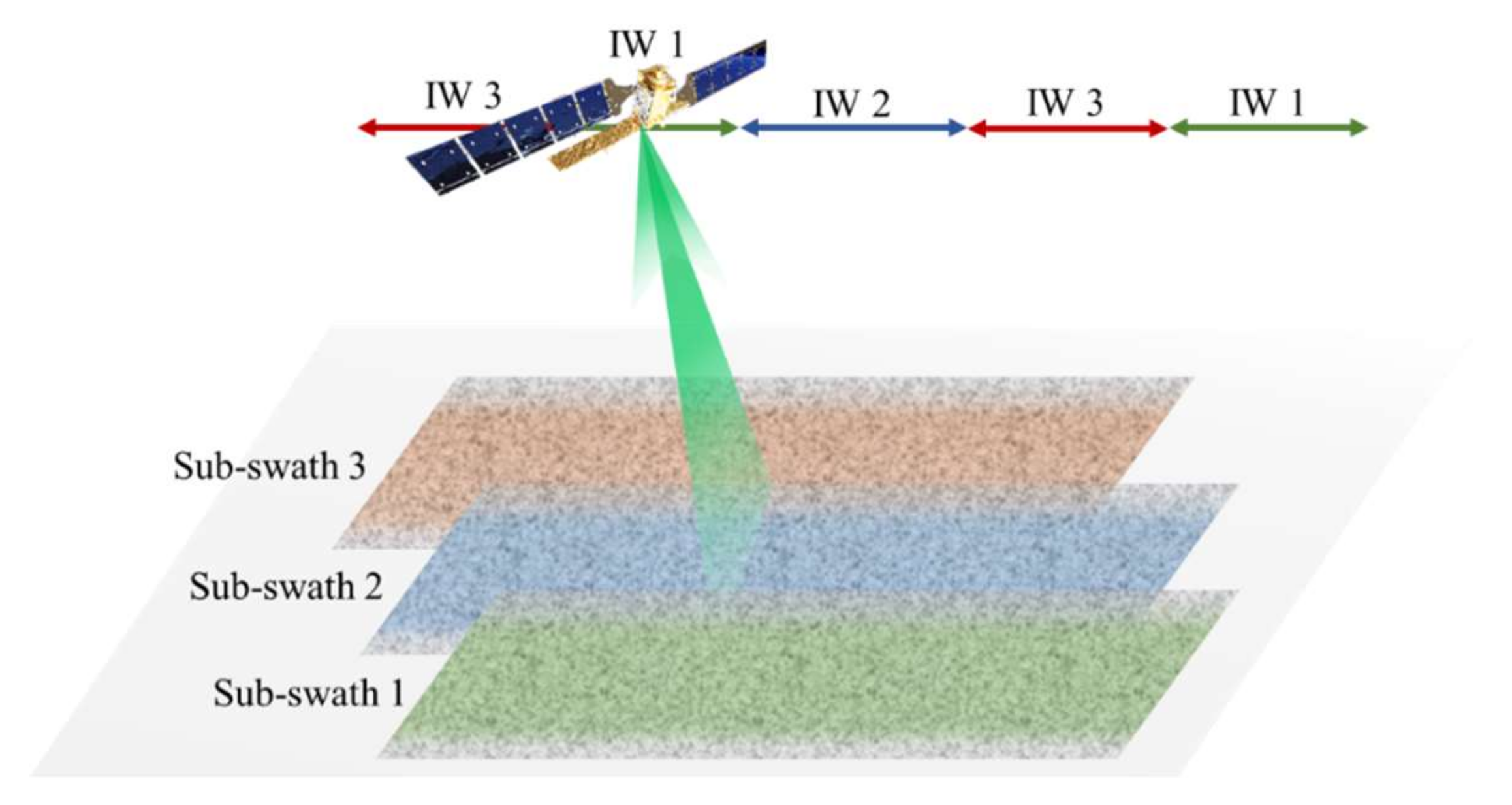
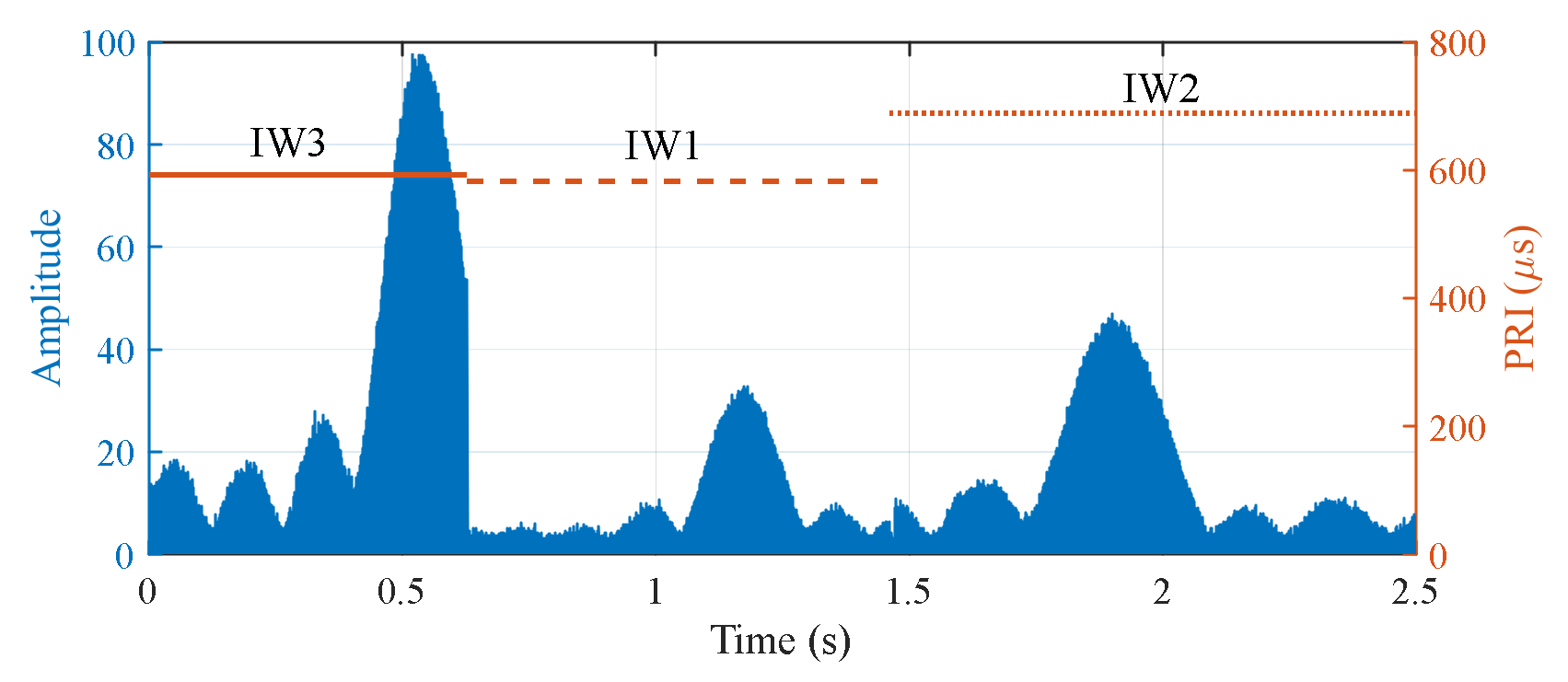
2. Sentinel-1 and System Overview
- (1)
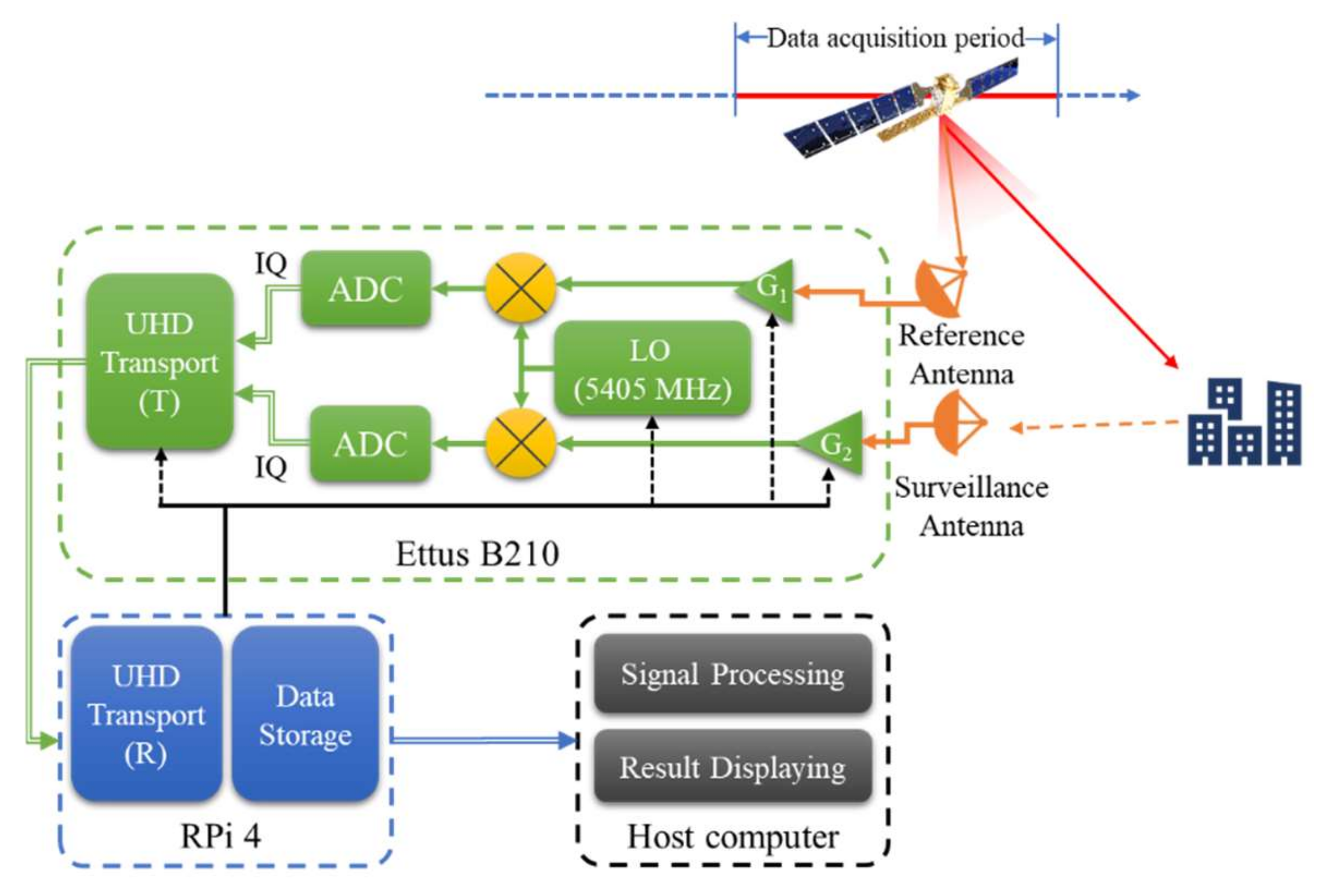
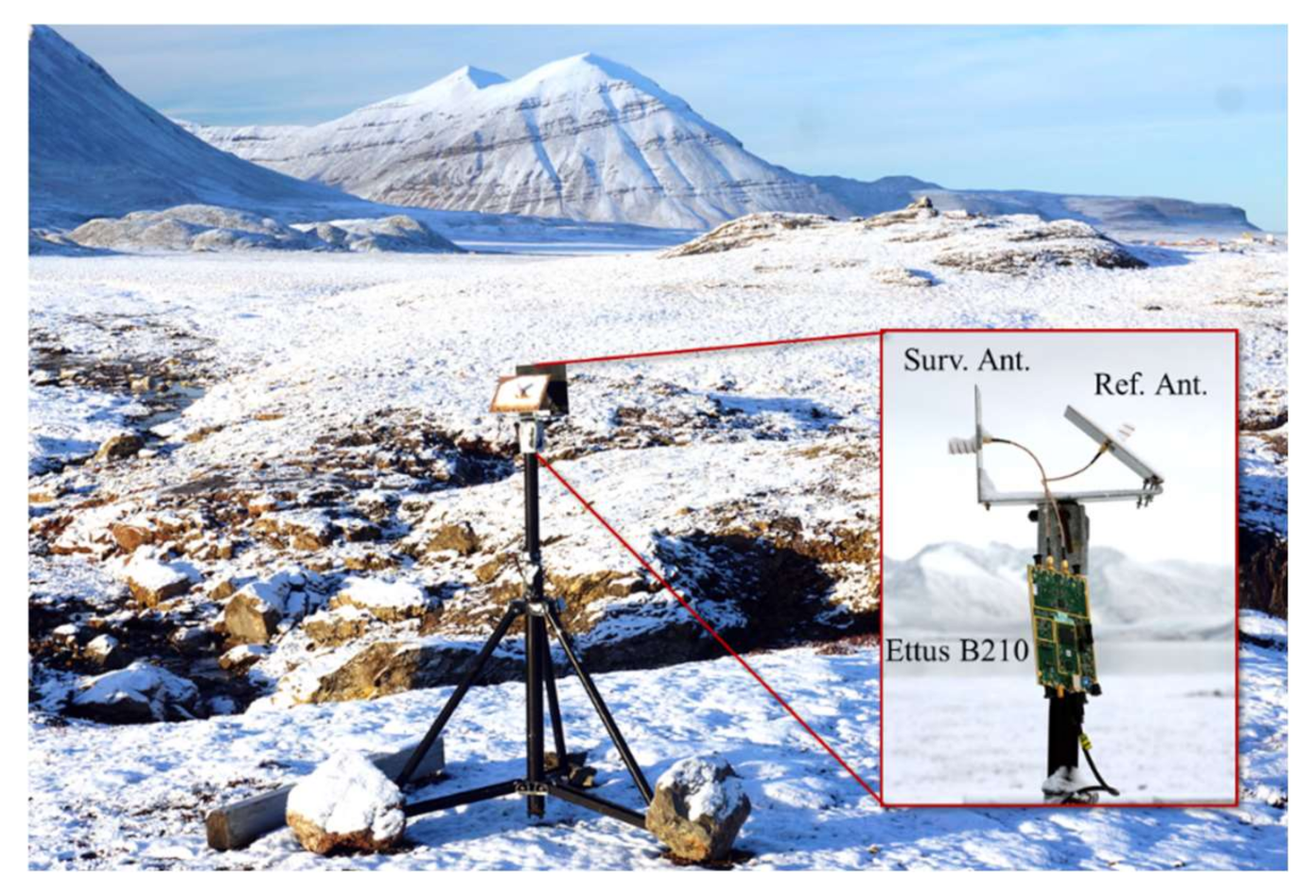
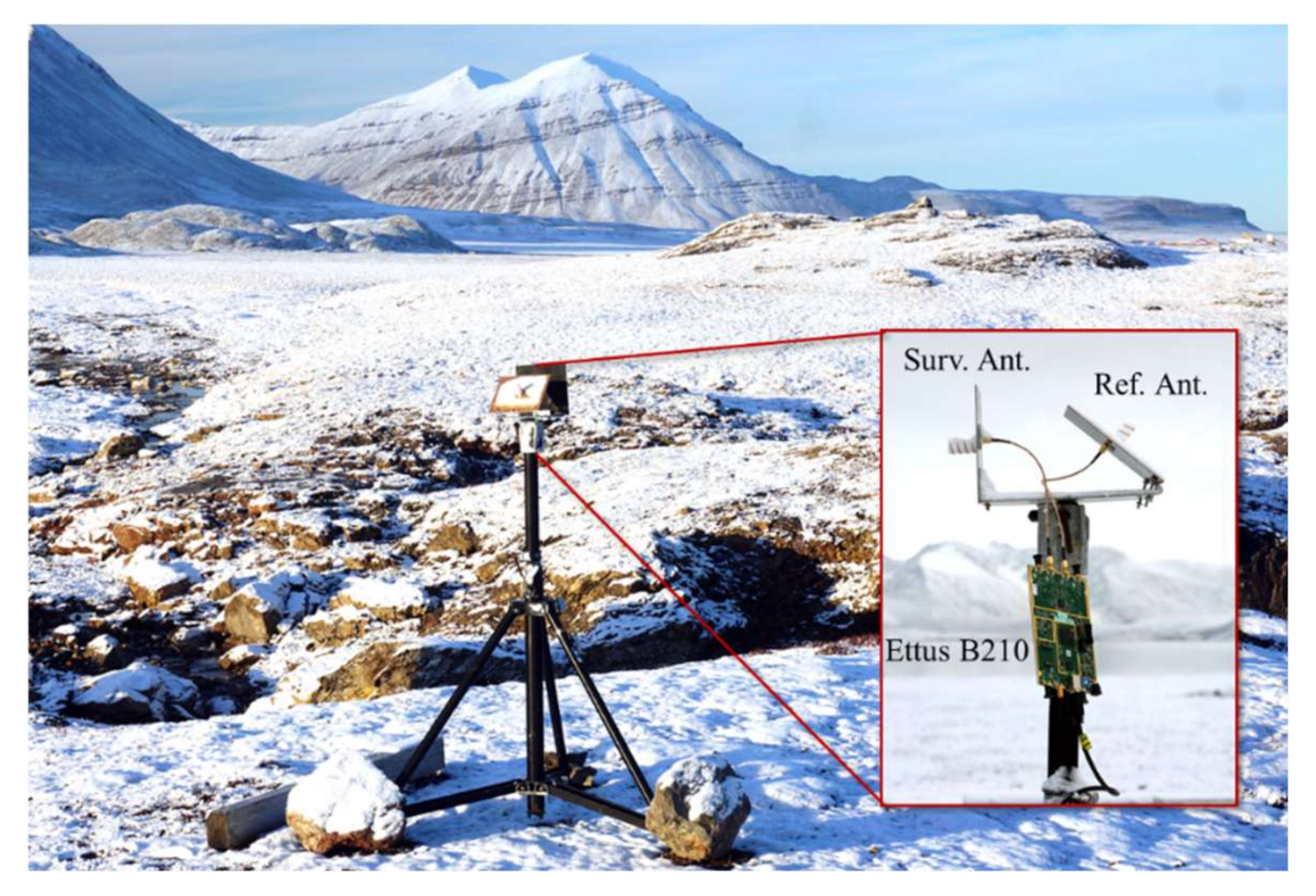
- Antennas. The helical antennas are designed according to [25] by winding four turns of enameled copper wire around a 15 mm hollow Teflon tube, providing a frequency band from 4.8 to 8.5 GHz, including the Sentinel-1 signal band. The low antenna gain design of 5 dB is selected for a wide beam to observe a broad imaging scene. The reference antenna is set at an angle matching the satellite elevation during its pass, and the surveillance antenna is set pointing to the targets in the observation scene.
- (2)
- SDR Receiver. The 70 MHz–6 GHz COTS Ettus B210 dual-channel SDR hardware is chosen as the receiver of the developed MF-PB-SAR system due to its high performance and low cost. Two receiving channels share a local oscillator (LO), setting at 5405 MHz, and the parameters (e.g., gain and offset) of each channel are adjusted according to the practical condition. As mentioned above, the data sampling frequency of Ettus B210 is set at 30 MS/s considering the dual-channel high-precision data acquisition and transmission.
- (3)
- RPi 4. The single-board computer RPi 4 fitted with a USB 3.0 port collects the data from the B210 and stores them in its RAM. Data collection duration and communication speed are maximized by reducing the sample resolution to a single byte/sample. Hence, at a rate of 30 MS/s, the complex dual-channel sample requires 7.2 GB/minute. The 8 GB RAM version of the RPi4 can hence hold 1 min worth of data or twice the pass duration of the satellite, allowing sample flexibility in data acquisition starting time.
- (4)
- Host computer. Once the 7.2 GB of data have been collected in RPi 4, they are transferred to the host computer. Signal pre-process and process, as are introduced in the next Section, are then conducted, and the target imaging results are finally displayed.
- (1)
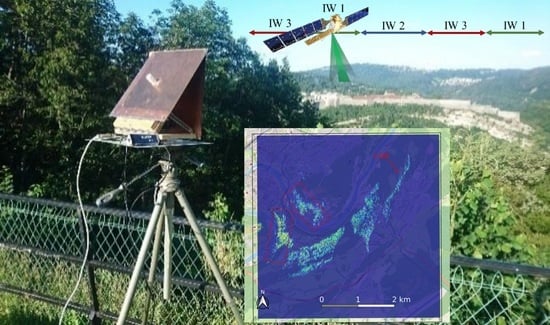
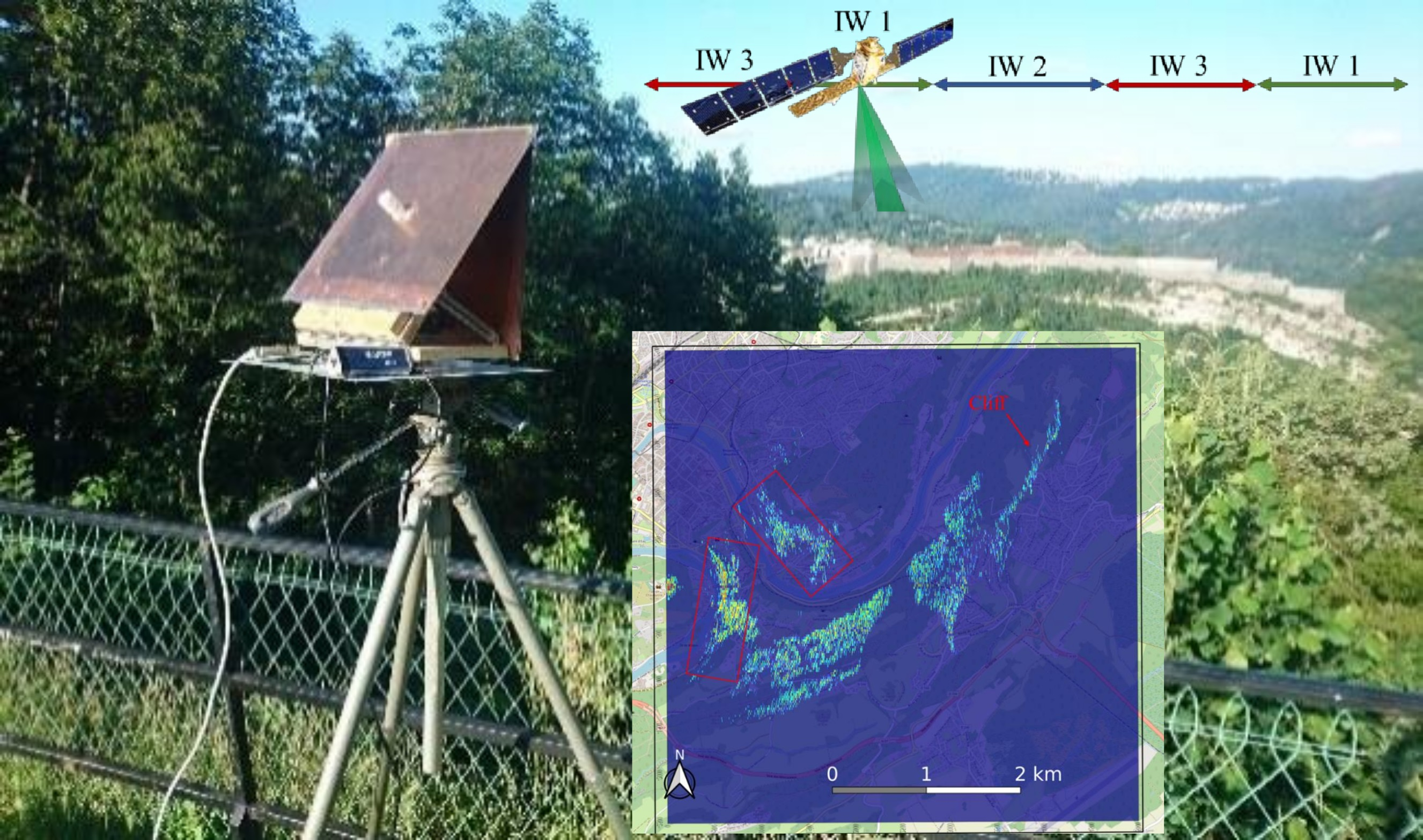
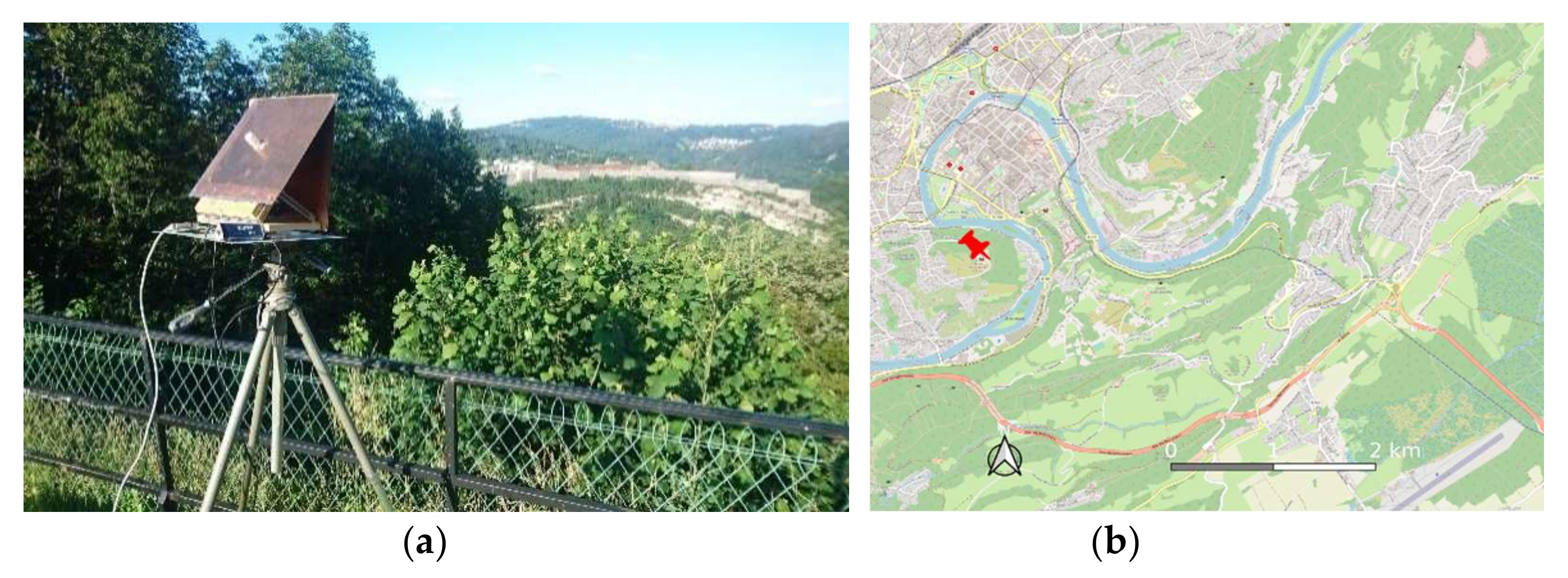
- The reference antenna orientation is set to ensure maximum reception of the direct satellite signal on the foundation of its relative position to Sentinel-1, where the scheduled pass geometry of the satellite is queried in public information, such as the Heavens Above website. The surveillance antenna is set to face the targets, and, to reduce the direct-path interference (DPI) in the surveillance channel, it is placed properly to make the satellite within its side lobe during the measurement.
- (2)
- The time window for data acquisition is determined from past datasets made available on the ESA Copernicus website, whose file name includes the beginning and ending of the data sampling with one second resolution. While a horizon-to-horizon satellite pass lasts 9 min, a given area is only illuminated for a few seconds. As introduced before, the satellite repeats its pattern over a period of 12 days. By searching the pattern over the scheduled site in the previous public raw data, the future accurate acquisition time within several seconds can be determined.
- (3)
- The signal of two channels is collected and converted into complex format by Ettus B210 and transmitted to RPi 4. RPi 4 stores the data in its RAM and later transfers them to the host computer, which finally analyzes and processes the data with the proposed methods.
3. Signal Model and Processing Methods
3.1. Signal Modeling and Pre-Processing
3.2. Effective Imaging Methods
| Algorithm 1 The proposed high-resolution imaging algorithm based on 2D FISTA |
| Input:, , , , , the maximal iteration number , and the stop parameter . Initial:, , and . for todo ; ; ; ; if then ; stop iteration. end if end for Return: or . |
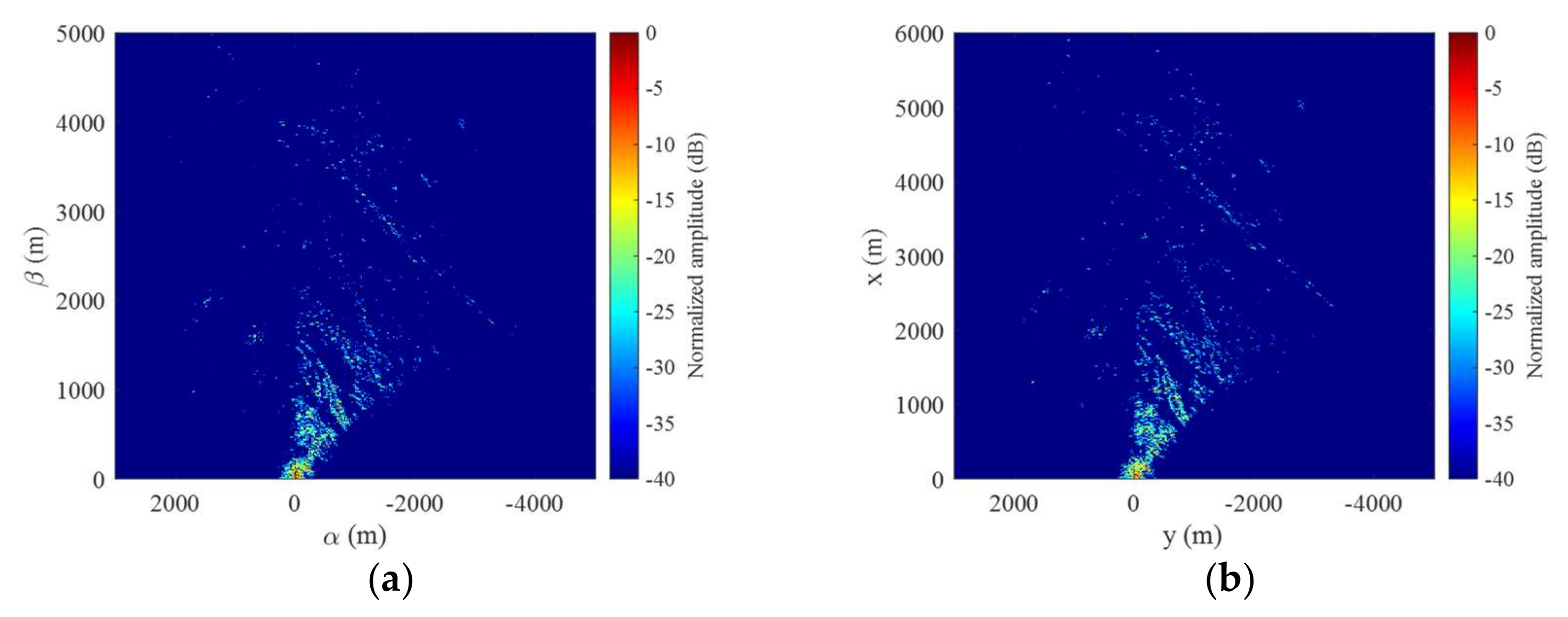
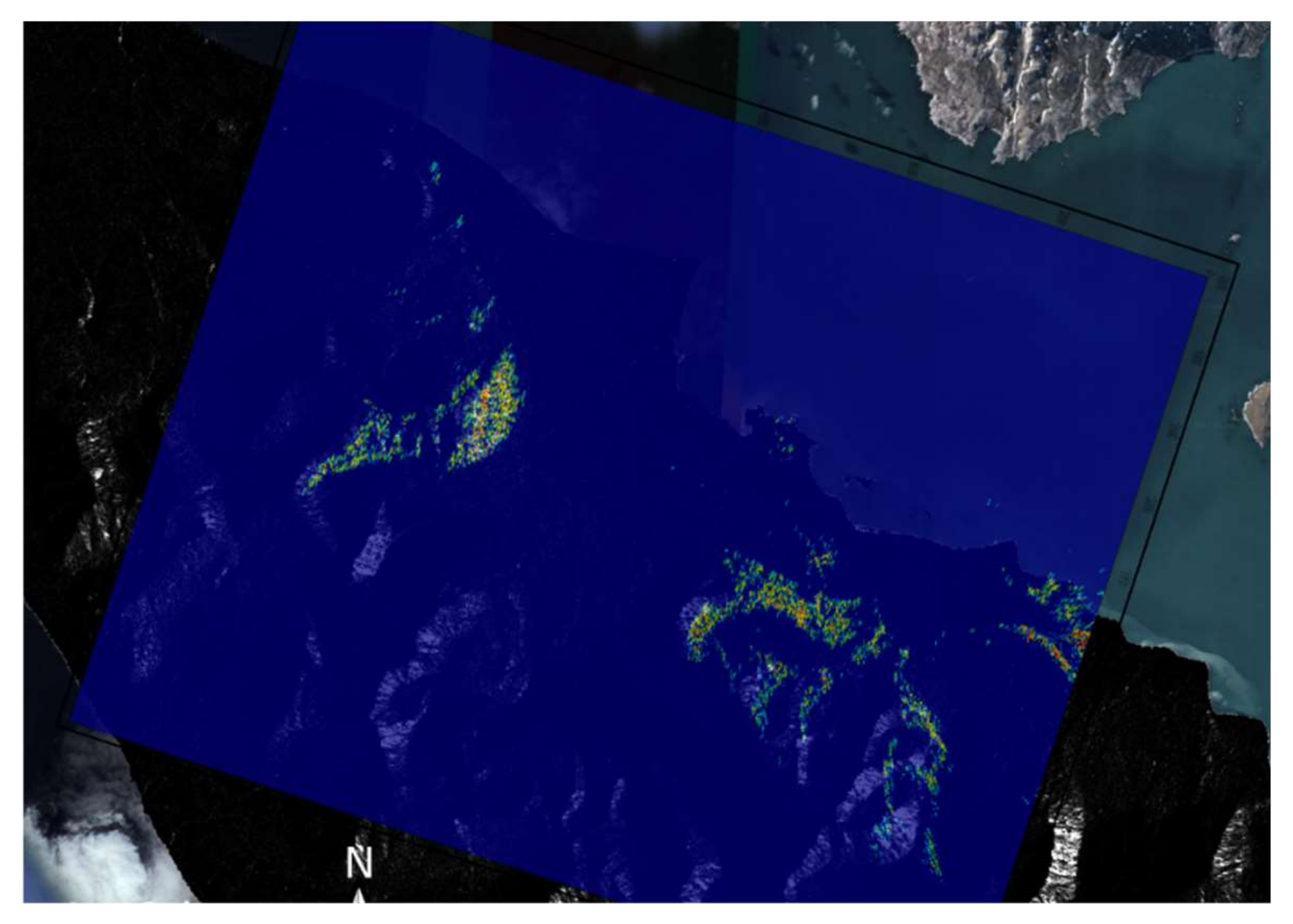
4. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Griffiths, H.D.; Baker, C.J. An Introduction to Passive Radar; Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Huang, C.; Li, Z.; Lou, M.; Qiu, X.; An, H.; Wu, J.; Yang, J.; Huang, W. BeiDou-Based Passive Radar Vessel Target Detection: Method and Experiment via Long-Time Optimized Integration. Remote Sens. 2021, 13, 3933. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.-M.; Cherniak, G.; Sato, M. Batch Compressive Sensing for Passive Radar Range-Doppler Map Generation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3090–3102. [Google Scholar] [CrossRef]
- Fang, Y.; Atkinson, G.; Sayin, A.; Chen, J.; Wang, P.; Antoniou, M.; Cherniakov, M. Improved Passive SAR Imaging with DVB-T Transmissions. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5066–5076. [Google Scholar] [CrossRef] [Green Version]
- Qiu, W.; Giusti, E.; Bacci, A.; Martorella, M.; Berizzi, F.; Zhao, H.; Fu, Q. Compressive sensing–based algorithm for passive bistatic ISAR with DVB-T signals. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2166–2180. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.-M.; Nico, G.; Wang, S.; Martin, G.; Sato, M. Passive Bistatic Ground-Based Synthetic Aperture Radar: Concept, System, and Experiment Results. Remote Sens. 2019, 11, 1753. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Antoniou, M.; Zeng, Z.; Cherniakov, M. Coherent Change Detection Using Passive GNSS-Based BSAR: Experimental Proof of Concept. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4544–4555. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.-M.; Cherniak, G.; Sato, M. Passive Radar Imaging by Filling Gaps Between ISDB Digital TV Channels. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2055–2068. [Google Scholar] [CrossRef]
- Gromek, D.; Kulpa, K.; Samczynski, P. Experimental Results of Passive SAR Imaging Using DVB-T Illuminators of Opportunity. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1124–1128. [Google Scholar] [CrossRef]
- Gromek, D.; Radecki, K.; Drozdowicz, J.; Samczyński, P.; Szabatin, J. Passive SAR imaging using DVB-T illumination for airborne applications. IET Radar Sonar Navig. 2019, 13, 213–221. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.; Cherniak, G.; Hu, Z.; Sato, M. Direct path interference suppression for short-range passive bistatic synthetic aperture radar imaging based on atomic norm minimisation and Vandermonde decomposition. IET Radar Sonar Navig. 2019, 13, 1171–1179. [Google Scholar] [CrossRef] [Green Version]
- Krysik, P.; Maslikowski, L.; Samczynski, P.; Kurowska, A. Bistatic Ground-Based Passive SAR Imaging Using TerraSAR-X as An Illuminator of Opportunity. In Proceedings of the IEEE International Conference on Radar, Adelaide, SA, Australia, 9–12 September 2013; pp. 39–42. [Google Scholar]
- Zhang, H.; Deng, Y.; Wang, R.; Li, N.; Zhao, S.; Hong, F.; Wu, L.; Loffeld, O. Spaceborne/Stationary Bistatic SAR Imaging with TerraSAR-X as an Illuminator in Staring-Spotlight Mode. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5203–5216. [Google Scholar] [CrossRef]
- Ma, H.; Antoniou, M.; Cherniakov, M. Passive GNSS-Based SAR Resolution Improvement Using Joint Galileo E5 Signals. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1640–1644. [Google Scholar] [CrossRef]
- Liu, F.; Fan, X.; Zhang, T.; Liu, Q. GNSS-Based SAR Interferometry for 3-D Deformation Retrieval: Algorithms and Feasibility Study. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5736–5748. [Google Scholar] [CrossRef]
- Anghel, A.; Cacoveanu, R.; Datcu, M. Repeat-Pass Spaceborne Transmitter-Stationary Receiver Bistatic Sar Interferometry—First Results. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; IEEE: Valencia, Spain, 2018; pp. 3651–3654. [Google Scholar]
- Anghel, A.; Cacoveanu, R.; Moldovan, A.-S.; Rommen, B.; Datcu, M. COBIS: Opportunistic C-Band Bistatic SAR Differential Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3980–3998. [Google Scholar] [CrossRef]
- Rosu, F.; Anghel, A.; Cacoveanu, R.; Rommen, B.; Datcu, M. Multiaperture Focusing for Spaceborne Transmitter/Ground-Based Receiver Bistatic SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5823–5832. [Google Scholar] [CrossRef]
- Focsa, A.; Anghel, A.; Datcu, M. A Compressive-Sensing Approach for Opportunistic Bistatic SAR Imaging Enhancement by Harnessing Sparse Multiaperture Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Meier, J.; Kelley, R.; Isom, B.M.; Yeary, M.; Palmer, R.D. Leveraging Software-Defined Radio Techniques in Multichannel Digital Weather Radar Receiver Design. IEEE Trans. Instrum. Meas. 2012, 61, 1571–1582. [Google Scholar] [CrossRef]
- Prager, S.; Thrivikraman, T.; Haynes, M.S.; Stang, J.; Hawkins, D.; Moghaddam, M. Ultrawideband Synthesis for High-Range-Resolution Software-Defined Radar. IEEE Trans. Instrum. Meas. 2020, 69, 3789–3803. [Google Scholar] [CrossRef]
- Feng, W.; Friedt, J.-M.; Wan, P. SDR-Implemented Ground-Based Interferometric Radar for Displacement Measurement. IEEE Trans. Instrum. Meas. 2021, 70, 1–18. [Google Scholar] [CrossRef]
- Available online: https://www.esa.int/Applications/Observing_the_Earth/Copernicus (accessed on 31 October 2021).
- Available online: https://heavens-above.com/ (accessed on 31 October 2021).
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Fortuny-Guasch, J. A Fast and Accurate Far-Field Pseudopolar Format Radar Imaging Algorithm. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1187–1196. [Google Scholar] [CrossRef]
- Han, K.; Wang, Y.; Chang, X.; Tan, W.; Hong, W. Generalized pseudopolar format algorithm for radar imaging with highly suboptimal aperture length. Sci. China Inf. Sci. 2014, 58, 1–15. [Google Scholar] [CrossRef]
- Bi, H.; Bi, G.; Zhang, B.; Hong, W.; Wu, Y. From Theory to Application: Real-Time Sparse SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2928–2936. [Google Scholar] [CrossRef]
- Fang, J.; Xu, Z.; Zhang, B.; Hong, W.; Wu, Y. Fast Compressed Sensing SAR Imaging Based on Approximated Observation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 352–363. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhao, G.; Li, H.; Ren, B.; Hu, W.; Liu, Y.; Yu, W.; Sun, H. Near-Field Radar Imaging via Compressive Sensing. IEEE Trans. Antennas Propag. 2014, 63, 828–833. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, W.; Friedt, J.-M.; Wan, P. SDR-Implemented Passive Bistatic SAR System Using Sentinel-1 Signal and Its Experiment Results. Remote Sens. 2022, 14, 221. https://doi.org/10.3390/rs14010221
Feng W, Friedt J-M, Wan P. SDR-Implemented Passive Bistatic SAR System Using Sentinel-1 Signal and Its Experiment Results. Remote Sensing. 2022; 14(1):221. https://doi.org/10.3390/rs14010221
Chicago/Turabian StyleFeng, Weike, Jean-Michel Friedt, and Pengcheng Wan. 2022. "SDR-Implemented Passive Bistatic SAR System Using Sentinel-1 Signal and Its Experiment Results" Remote Sensing 14, no. 1: 221. https://doi.org/10.3390/rs14010221
APA StyleFeng, W., Friedt, J.-M., & Wan, P. (2022). SDR-Implemented Passive Bistatic SAR System Using Sentinel-1 Signal and Its Experiment Results. Remote Sensing, 14(1), 221. https://doi.org/10.3390/rs14010221