
Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon


 ,
,
Abstract
1. Introduction
2. GNSS PWV Assimilation Method and Model Setups
2.1. Algorithm for GNSS PWV Data Assimilation
2.2. Case Description and Experiment Design
3. Data Used in the Experiments
4. Effect of GNSS PWV Assimilation on the Water Vapor
5. Impact on the Typhoon Track, Intensity, and Precipitation
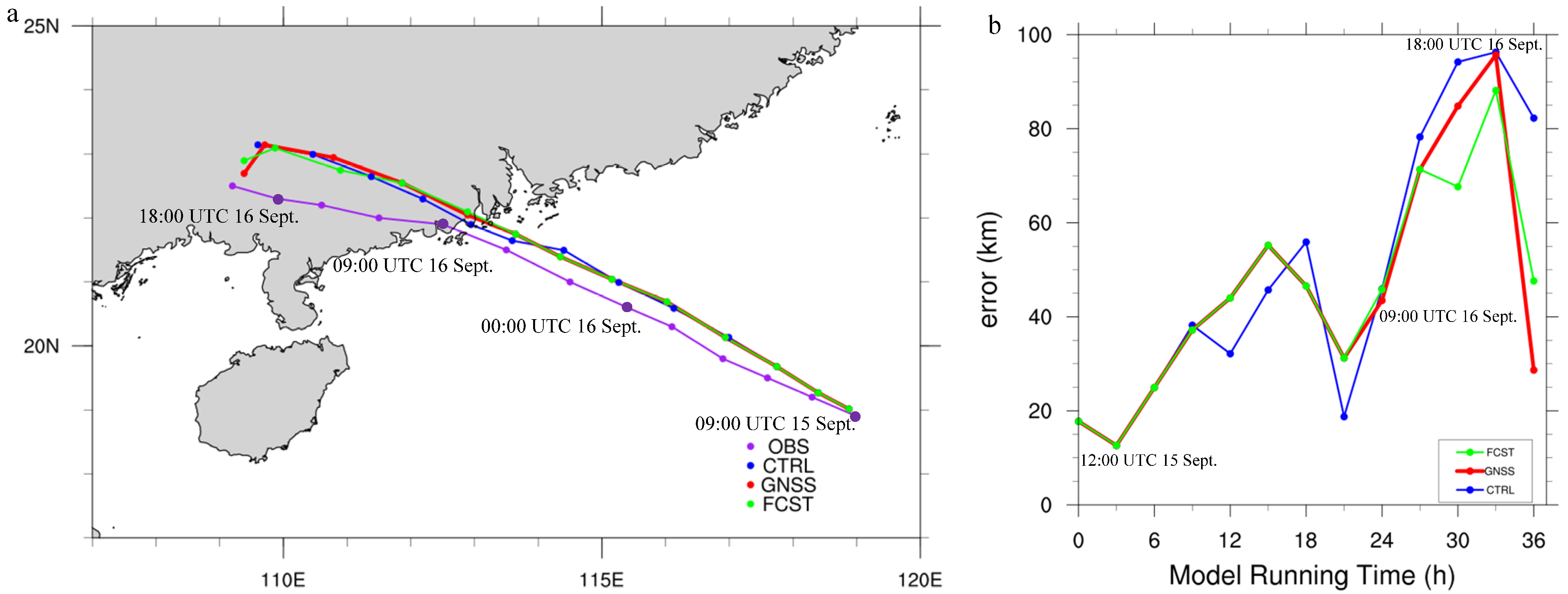
5.1. Typhoon Track
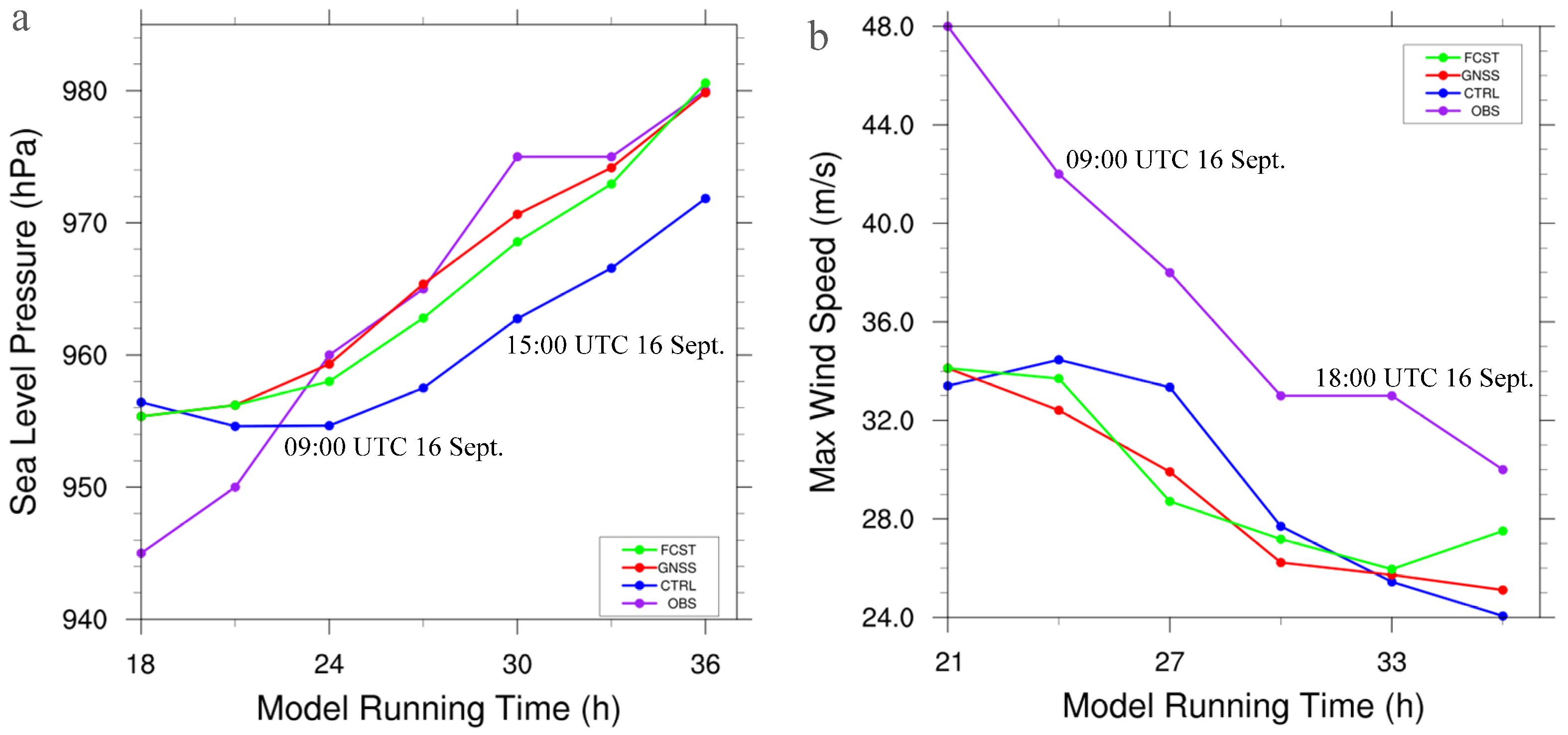
5.2. Typhoon Intensity
5.3. Typhoon Precipitation
6. Conclusions
- (1)
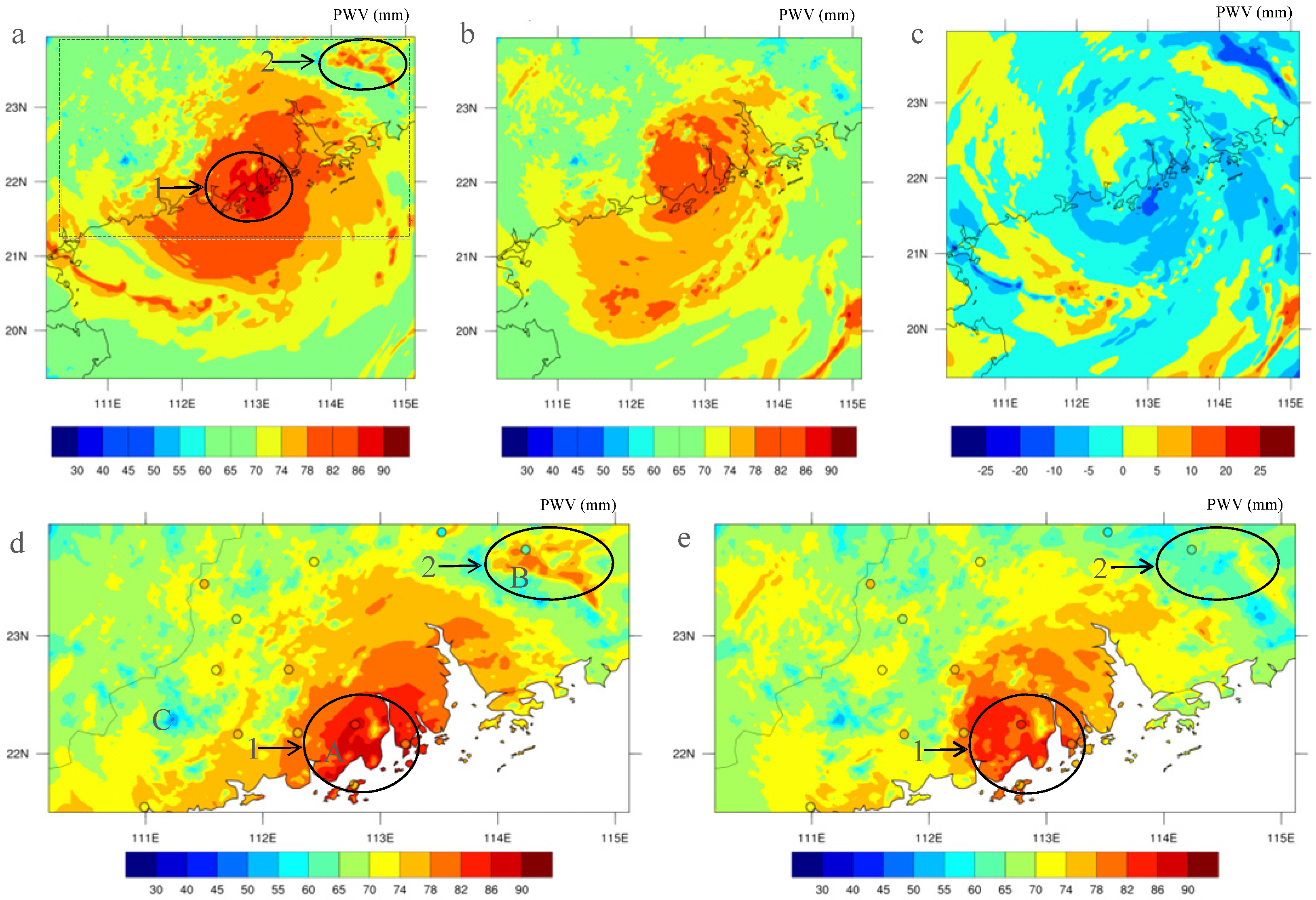
- The water vapor profile retrieving procedure and nudging-based RTFDDA are capable of adequately assimilating GNSS PWV data into the WRF modeling system to improve the water vapor fields of Typhoon “Mangkhut”, especially in its inner-core region. In comparison with the CTRL experiment (no data assimilation), the GNSS PWV data assimilation can correct regions with either overestimation or underestimation of water vapor, reducing bias by 1–2 mm and improving the correlation coefficient by 0.1–0.3.
- (2)
- Assimilation of GNSS PWV data improves the simulation and prediction of the typhoon track, central pressures, and surface precipitation. The typhoon track simulation and prediction only occurred after the typhoon moved close the coast and after landfall because most GNSS stations are located inland. Assimilating GNSS PWV data corrected 5–10 hPa bias of the central pressure of the typhoon at and after its landfall from the CTRL run. Furthermore, assimilating the GNSS PWV data improved majority of the inner-core rainbands and their precipitation intensity. The TSs of the precipitation simulation and forecast in the inner-core region were improved by 0.04–0.09.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tregoning, P.; Boers, R.; O’Brien, D.; Hendy, M. Accuracy of absolute precipitable water vapor estimates from GPS observations. J. Geophys. Res. Atmos. 1998, 103, 28701–28710. [Google Scholar] [CrossRef]
- Gutman, S.I.; Benjamin, S.G. The Role of Ground-Based GPS Meteorological Observations in Numerical Weather Prediction. GPS Solut. 2001, 4, 16–24. [Google Scholar] [CrossRef]
- Shi, C.; Wang, H.; Cao, Y.; Zhang, E.; Liang, H.; Fu, Z. Analysis on Performance of Water Vapor Detection Based on BeiDou Satellite. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 285–289. [Google Scholar] [CrossRef]
- Kuo, Y.-H.; Guo, Y.-R.; Westwater, E.R. Assimilation of Precipitable Water Measurements into a Mesoscale Numerical Model. Mon. Weather Rev. 1993, 121, 1215–1238. [Google Scholar] [CrossRef]
- Cucurull, L.; Vandenberghe, F.; Barker, D.; Vilaclara, E.; Rius, A. Three-Dimensional Variational Data Assimilation of Ground-Based GPS ZTD and Meteorological Observations during the 14 December 2001 Storm Event over the Western Mediterranean Sea. Mon. Weather Rev. 2004, 132, 749–763. [Google Scholar] [CrossRef]
- Kuo, Y.-H.; Zou, X.; Guo, Y.-R. Variational Assimilation of Precipitable Water Using a Nonhydrostatic Mesoscale Adjoint Model. Part I: Moisture Retrieval and Sensitivity Experiments. Mon. Weather Rev. 1996, 124, 122–147. [Google Scholar] [CrossRef]
- Guo, Y.-R.; Kuo, Y.-H.; Dudhia, J.; Parsons, D.; Rocken, C. Four-Dimensional Variational Data Assimilation of Heterogeneous Mesoscale Observations for a Strong Convective Case. Mon. Weather Rev. 2000, 128, 619–643. [Google Scholar] [CrossRef]
- De Pondeca, M.S.F.V.; Zou, X. A Case Study of the Variational Assimilation of GPS Zenith Delay Observations into a Mesoscale Model. J. Appl. Meteorol. 2001, 40, 1559–1576. [Google Scholar] [CrossRef]
- Ha, S.-Y.; Kuo, Y.-H.; Guo, Y.-R.; Lim, G.-H. Variational Assimilation of Slant-Path Wet Delay Measurements from a Hypothetical Ground-Based GPS Network. Part I: Comparison with Precipitable Water Assimilation. Mon. Weather Rev. 2003, 131, 2635–2655. [Google Scholar] [CrossRef]
- Grell, G.A.; Dudhia, J.; Stauffer, D.R. Description of the Fifth-Generation Penn State/NCAR Mesoscale Model (MM5); Technical Note NCAR/TN-398+STR; National Center for Atmospheric Research (NCAR): Boulder, CO, USA, 1994. [Google Scholar] [CrossRef]
- Smith, T.L.; Benjamin, S.G.; Schwartz, B.E.; Gutman, S.I. Using GPS-IPW in a 4-D data assimilation system. Earth Planets Space 2000, 52, 921–926. [Google Scholar] [CrossRef]
- Guo, Y.R.; Kusaka, H.; Barker, D.M.; Kuo, Y.H.; Crook, A. Impact of Ground-based GPS PW and MM5-3DVar Background Error Statistics on Forecast of a Convective Case. SOLA 2005, 1, 73–76. [Google Scholar] [CrossRef][Green Version]
- Zus, F.; Grzeschik, M.; Bauer, H.; Wulfmeyer, V.; Dick, G.; Bender, M. Development and optimization of the IPM MM5 GPS slant path 4DVAR system. Meteorol. Z. 2008, 17, 867–885. [Google Scholar] [CrossRef]
- Kawabata, T.; Shoji, Y.; Seko, H.; Saito, K. A Numerical Study on a Mesoscale Convective System over a Subtropical Island with 4D-Var Assimilation of GPS Slant Total Delays. J. Meteorol. Soc. Japan. Ser. II 2013, 91, 705–721. [Google Scholar] [CrossRef][Green Version]
- Järvinen, H.; Eresmaa, R.; Vedel, H.; Salonen, K.; Niemelä, S.; de Vries, J. A variational data assimilation system for ground-based GPS slant delays. Q. J. R. Meteorol. Soc. 2007, 133, 969–980. [Google Scholar] [CrossRef]
- Vedel, H.; Huang, X.-Y. Impact of Ground Based GPS Data on Numerical Weather Prediction. J. Meteorol. Soc. Jpn. 2004, 82, 459–472. [Google Scholar] [CrossRef]
- Memmo, A.; Fionda, E.; Paolucci, T.; Cimini, D.; Ferretti, R.; Bonafoni, S.; Ciotti, P. Comparison of MM5 integrated water vapor with microwave radiometer, GPS, and radiosonde measurements. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1050–1058. [Google Scholar] [CrossRef]
- Benjamin, S.; Jamison, B.; Moninger, W.; Sahm, S.; Schwartz, B.; Schlatter, T. Relative Short-Range Forecast Impact from Aircraft, Profiler, Radiosonde, VAD, GPS-PW, METAR, and Mesonet Observations via the RUC Hourly Assimilation Cycle. Mon. Weather Rev. 2010, 138, 1319–1343. [Google Scholar] [CrossRef]
- Lorenc, A.; Bell, R.S.; Macpherson, B. The Meteorological Office analysis correction data assimilation scheme. Q. J. R. Meteorol. Soc. 1991, 117, 59–89. [Google Scholar] [CrossRef]
- Wang, J. A Nowcast/Forecast System for Coastal Ocean Circulation Using Simple Nudging Data Assimilation. J. Atmos. Ocean. Technol. 2001, 18, 1037–1047. [Google Scholar] [CrossRef]
- Yap, K.-S. Impact of a Newtonian Assimilation and Physical Initialization on the Initialization and Prediction by a Tropical Mesoscale Model. Mon. Weather Rev. 1995, 123, 833–861. [Google Scholar] [CrossRef]
- Anthes, R.A.; Hsie, E.Y.; Kuo, Y.H. Description of the Penn State/NCAR Mesoscale Model, Version 4 (MM4); NCAR Technical Note TN-282+STR; National Center for Atmospheric Research (NCAR): Boulder, CO, USA, 1987. [Google Scholar] [CrossRef]
- Stauffer, D.R.; Seaman, N.L. Use of Four-Dimensional Data Assimilation in a Limited-Area Mesoscale Model. Part I: Experiments with Synoptic-Scale Data. Mon. Weather Rev. 1990, 118, 1250–1277. [Google Scholar] [CrossRef]
- Stauffer, D.R.; Seaman, N.L.; Binkowski, F.S. Use of Four-Dimensional Data Assimilation in a Limited-Area Mesoscale Model Part II: Effects of Data Assimilation within the Planetary Boundary Layer. Mon. Weather Rev. 1991, 119, 734–754. [Google Scholar] [CrossRef]
- Stauffer, D.R.; Seaman, N.L. Multiscale Four-Dimensional Data Assimilation. J. Appl. Meteorol. Climatol. 1994, 33, 416–434. [Google Scholar] [CrossRef]
- Seaman, N.L.; Stauffer, D.R.; Lario-Gibbs, A.M. A Multiscale Four-Dimensional Data Assimilation System Applied in the San Joaquin Valley during SARMAP. Part I: Modeling Design and Basic Performance Characteristics. J. Appl. Meteorol. Climatol. 1995, 34, 1739–1761. [Google Scholar] [CrossRef]
- Seaman, N.L.; Stauffer, D.R.; McNally, D.E.; Tanrikulu, S. Application of the MM5-FDDA Meteorological Model to the Southern California SCAQS-1997 Domain: Preliminary Test Using the SCAQS August 1987 Case; American Meteorological Society: Boston, MA, USA, 1996. [Google Scholar]
- Warner, T.T.; Seaman, N.L. A Real-Time, Mesoscale Numerical Weather-Prediction System Used for Research, Teaching, and Public Service at The Pennsylvania State University. Bull. Am. Meteorol. Soc. 1990, 71, 792. [Google Scholar] [CrossRef][Green Version]
- Pacione, R.; Sciarretta, C.; Faccani, C.; Ferretti, R.; Vespe, F. GPS PW assimilation into MM5 with the nudging technique. Phys. Chem. Earth Part A Solid Earth Geod. 2001, 26, 481–485. [Google Scholar] [CrossRef]
- Liu, Y.; Bourgeois, A.; Warner, T.; Swerdlin, S.; Hacker, J. IMPLEMENTATION OF OBSERVATION-NUDGING BASED FDDA INTO WRF FOR SUPPORTING ATEC TEST OPERATIONS. 2005. Available online: https://www.researchgate.net/publication/228942774_Implementation_of_observation-nudging_based_on_FDDA_into_WRF_for_supporting_AFEC_test_operations (accessed on 24 December 2021).
- Liu, Y.; Warner, T.T.; Bowers, J.F.; Carson, L.P.; Chen, F.; Clough, C.A.; Davis, C.A.; Egeland, C.H.; Halvorson, S.F.; Huck, T.W.; et al. The Operational Mesogamma-Scale Analysis and Forecast System of the U.S. Army Test and Evaluation Command. Part I: Overview of the Modeling System, the Forecast Products, and How the Products Are Used. J. Appl. Meteorol. Climatol. 2008, 47, 1077–1092. [Google Scholar] [CrossRef]
- Liu, Y.; Warner, T.T.; Astling, E.G.; Bowers, J.F.; Davis, C.A.; Halvorson, S.F.; Rife, D.L.; Sheu, R.-S.; Swerdlin, S.P.; Xu, M. The Operational Mesogamma-Scale Analysis and Forecast System of the U.S. Army Test and Evaluation Command. Part II: Interrange Comparison of the Accuracy of Model Analyses and Forecasts. J. Appl. Meteorol. Climatol. 2008, 47, 1093–1104. [Google Scholar] [CrossRef][Green Version]
- Liu, Y.; Chen, F.; Warner, T.; Basara, J. Verification of a Mesoscale Data-Assimilation and Forecasting System for the Oklahoma City Area during the Joint Urban 2003 Field Project. J. Appl. Meteorol. Climatol. 2006, 45, 912–929. [Google Scholar] [CrossRef]
- Pan, L.; Liu, Y.; Liu, Y.; Li, L.; Jiang, Y.; Cheng, W.; Roux, G. Impact of four dimensional data assimilation (FDDA) on urban climate analysis. J. Adv. Modeling Earth Syst. 2015, 7, 1997–2011. [Google Scholar] [CrossRef]
- Rife, D.L.; Davis, C.A.; Liu, Y.; Warner, T.T. Predictability of Low-Level Winds by Mesoscale Meteorological Models. Mon. Weather Rev. 2004, 132, 2553–2569. [Google Scholar] [CrossRef]
- Wyszogrodzki, A.A.; Liu, Y.; Jacobs, N.; Childs, P.; Zhang, Y.; Roux, G.; Warner, T.T. Analysis of the surface temperature and wind forecast errors of the NCAR-AirDat operational CONUS 4-km WRF forecasting system. Meteorol. Atmos. Phys. 2013, 122, 125–143. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, Y.; Xu, M.; Liu, Y.; Pan, L.; Wang, H.; Cheng, W.Y.Y.; Jiang, Y.; Lan, H.; Yang, H.; et al. Forecasting severe convective storms with WRF-based RTFDDA radar data assimilation in Guangdong, China. Atmos. Res. 2018, 209, 131–143. [Google Scholar] [CrossRef]
- Reen, B. A Brief Guide to Observation Nudging in WRF; Battlefield Environment Division, Army Research Laboratory: Adelphi, Maryland, 2016. [Google Scholar]
- Hong, S.-Y.; Lim, J. The WRF Single-Moment 6-Class Microphysics Scheme (WSM6). Asia-Pac. J. Atmos. Sci. 2006, 42, 129–151. Available online: https://www2.mmm.ucar.edu/wrf/users/workshops/WS2006/abstracts/PSession05/P5_4_Hong.pdf (accessed on 24 December 2021).
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Grell, G.A.; Freitas, S.R. A scale and aerosol aware stochastic convective parameterization for weather and air quality modeling. Atmos. Chem. Phys. 2014, 14, 5233–5250. [Google Scholar] [CrossRef]
- Alapaty, K. Development and Testing of the Dynamic Formulation of Relaxation Timescale for use in Cumulus Convection Parameterizations. In Proceedings of the American Geophysical Union, Fall Meeting, San Francisco, CA, USA, 15–19 December 2008; Available online: https://www.researchgate.net/publication/252244666_Development_and_Testing_of_the_Dynamic_Formulation_of_Relaxation_Timescale_for_use_in_Cumulus_Convection_Parameterizations (accessed on 24 December 2021).
- Betts, A.K.; Chen, F.; Mitchell, K.E.; Janjic, Z.I. Assessment of the Land Surface and Boundary Layer Models in Two Operational Versions of the NCEP Eta Model Using FIFE Data. Mon. Weather Rev. 1997, 125, 2896–2916. [Google Scholar] [CrossRef]
- Wu, M.; Jin, S.; Li, Z.; Cao, Y.; Ping, F.; Tang, X. High-Precision GNSS PWV and Its Variation Characteristics in China Based on Individual Station Meteorological Data. Remote Sens. 2021, 13, 1296. [Google Scholar] [CrossRef]
- Wang, C. On the Calculation and Correction of Equitable Threat Score for Model Quantitative Precipitation Forecasts for Small Verification Areas: The Example of Taiwan. Weather Forecast. 2014, 29, 788–798. [Google Scholar] [CrossRef]
- Wang, S.; Hui, J.; Zhang, G.; Gao, J.; Hu, J.; He, X. Research on the Precipitation Grade Standards for Short-term Proximity Meteorological Services. In Proceedings of the 34th Annual Meeting of China Meteorological Society, Zhengzhou, China, 26–29 September 2017; Available online: http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGQX201709011069.htm (accessed on 24 December 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
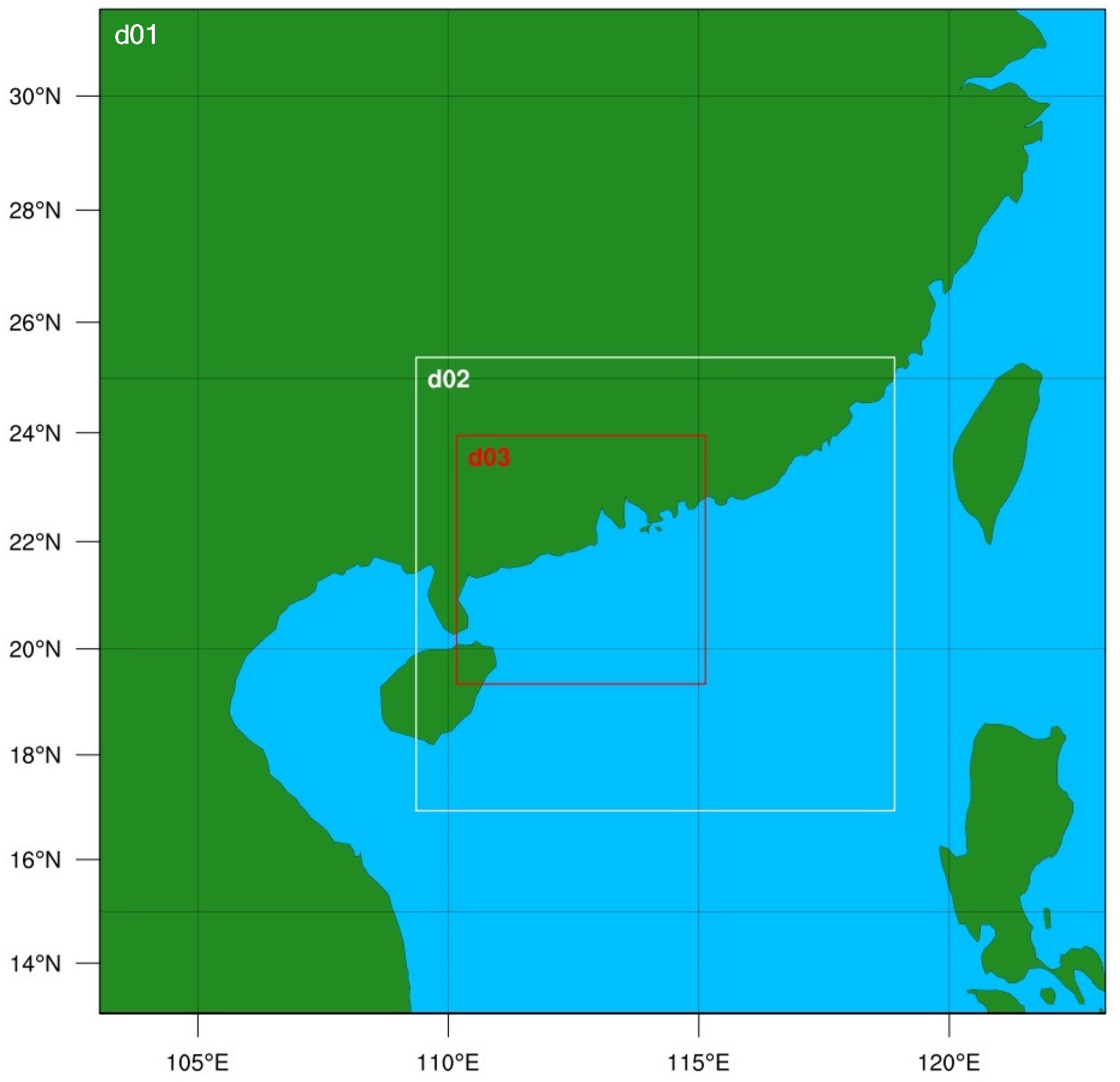
| Grid Region | d01 | d02 | d03 |
|---|---|---|---|
| Grid point | 125 × 125 | 178 × 169 | 277 × 277 |
| Grid interval | 9 km | 3 km | 1 km |
| Vertical levels | 34 levels | ||
| Microphysical process scheme | WSM6 scheme | ||
| Radiation process scheme | RRTMG scheme | ||
| Cumulus parameterization scheme | Grell–Freitas scheme (d01 only) | ||
| Land surface process scheme | Noah scheme | ||
| Boundary layer scheme | YSU scheme | ||
| Near-surface layer scheme | Monin–Obukhov scheme | ||
| Exp. | Scheme | Time (UTC) |
|---|---|---|
| CTRL | No data assimilation | 09:00 15 September 2018–21:00 16 September 2018 |
| GNSS | Assimilation of GNSS PWV for the whole period | 09:00 15 September 2018–21:00 16 September 2018 |
| FCST | Assimilation of GNSS PWV during the 0–24 h and forecasting starts at the 24th h | 09:00 15 September 2018–09:00 16 September 2018 09:00 16 September 2018–21:00 16 September 2018 |
| Time (UTC) | BIAS (mm) | RMSE (mm) | Correlation Coefficient | |||
|---|---|---|---|---|---|---|
| CTRL | GNSS | CTRL | GNSS | CTRL | GNSS | |
| 03:00 16 September 2018 | −1.42 | −0.44 | 4.80 | 4.66 | 0.46 | 0.67 |
| 09:00 16 September 2018 | 2.08 | 0.09 | 6.04 | 5.93 | 0.56 | 0.70 |
| 12:00 16 September 2018 | 2.41 | 0.37 | 5.30 | 4.82 | 0.37 | 0.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Liu, Y.; Liu, Y.; Cao, Y.; Liang, H.; Hu, H.; Liang, J.; Tu, M. Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon. Remote Sens. 2022, 14, 178. https://doi.org/10.3390/rs14010178
Wang H, Liu Y, Liu Y, Cao Y, Liang H, Hu H, Liang J, Tu M. Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon. Remote Sensing. 2022; 14(1):178. https://doi.org/10.3390/rs14010178
Chicago/Turabian StyleWang, Haishen, Yubao Liu, Yuewei Liu, Yunchang Cao, Hong Liang, Heng Hu, Jingshu Liang, and Manhong Tu. 2022. "Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon" Remote Sensing 14, no. 1: 178. https://doi.org/10.3390/rs14010178
APA StyleWang, H., Liu, Y., Liu, Y., Cao, Y., Liang, H., Hu, H., Liang, J., & Tu, M. (2022). Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon. Remote Sensing, 14(1), 178. https://doi.org/10.3390/rs14010178