
UAV-Based Remote Sensing Applications for Bridge Condition Assessment


Abstract
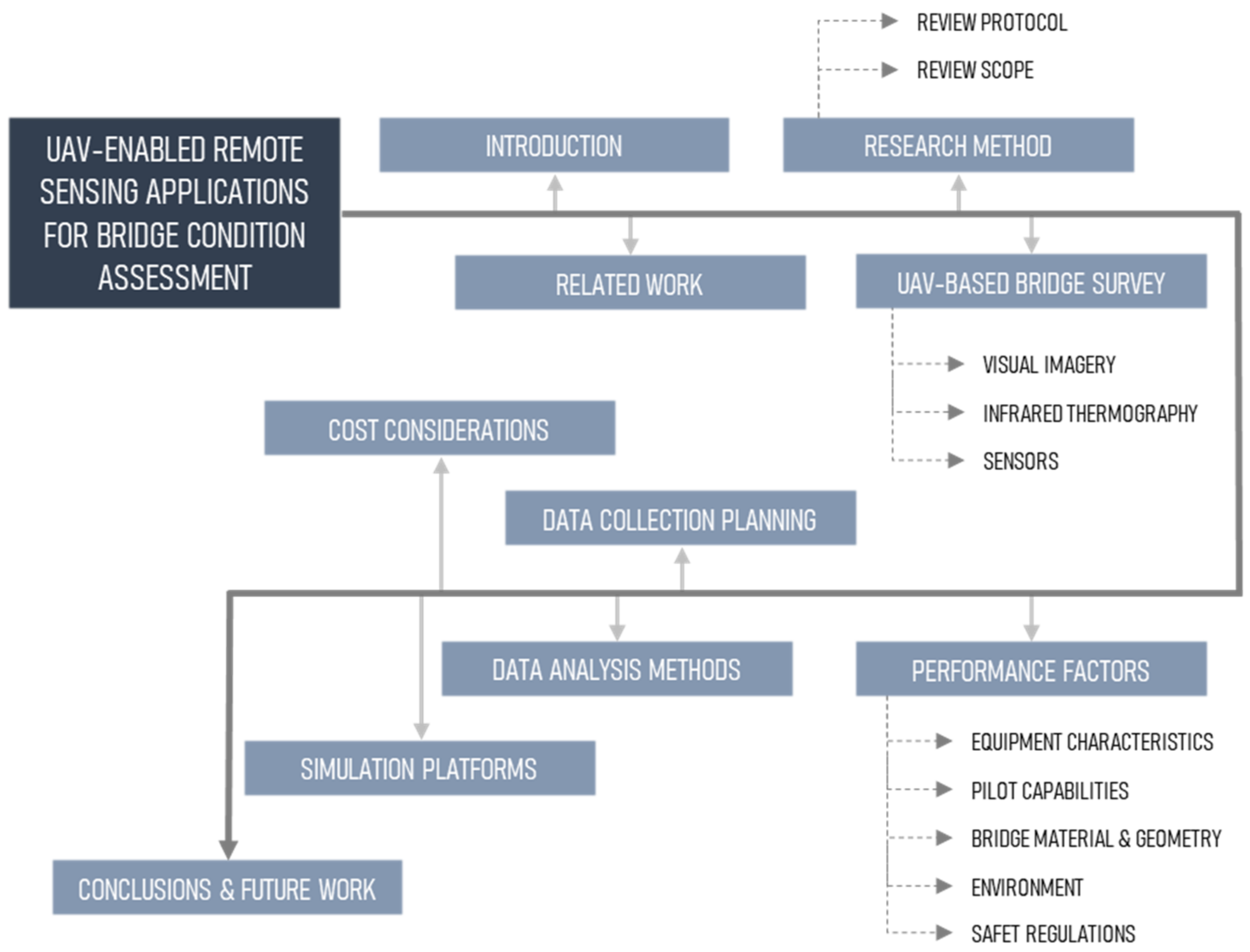
1. Introduction
2. Related Work
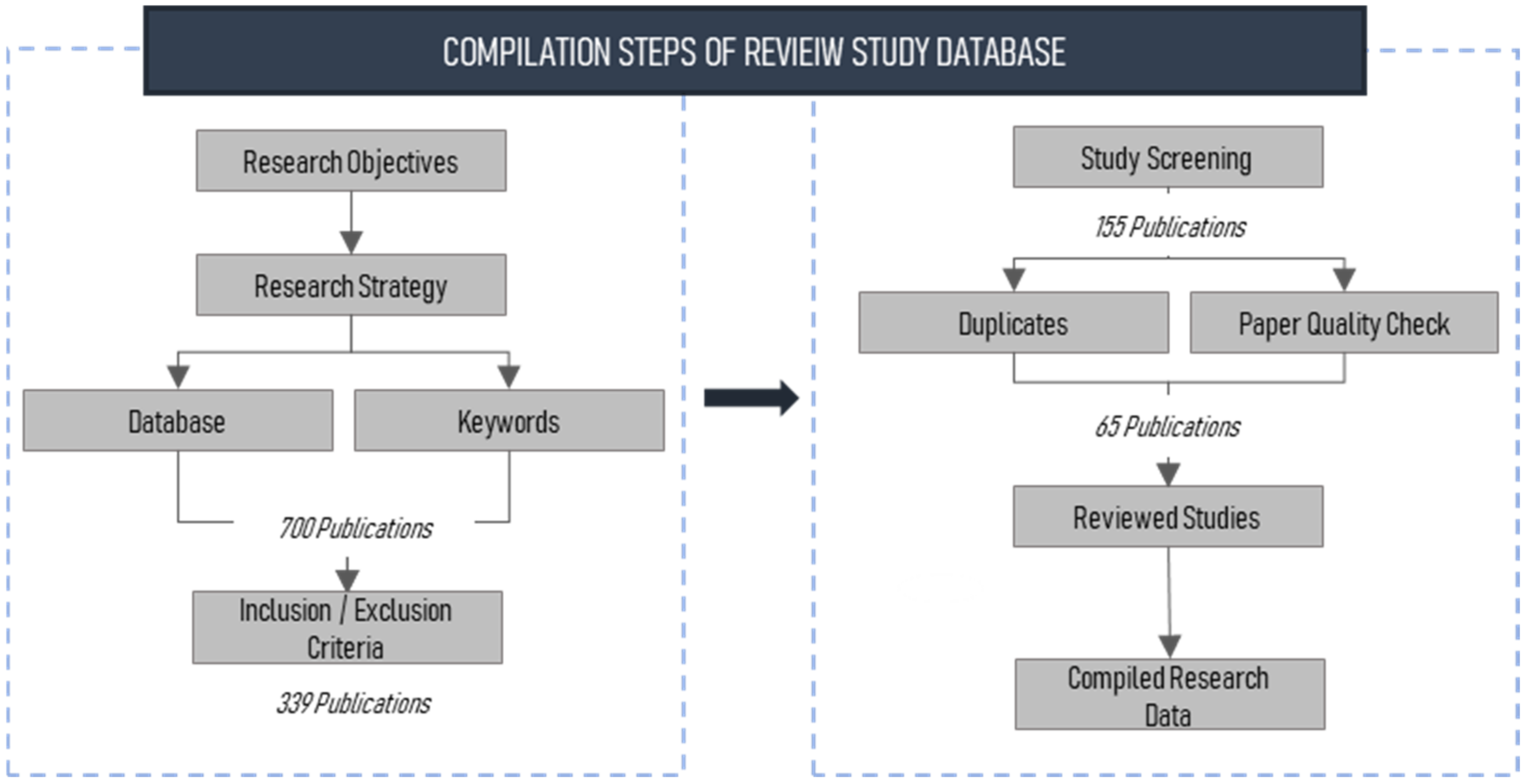
3. Research Method
3.1. Scope of the Review
3.2. Research Questions
3.3. Review Protocol
4. Bridge Survey Using Unmanned Aerial Vehicles
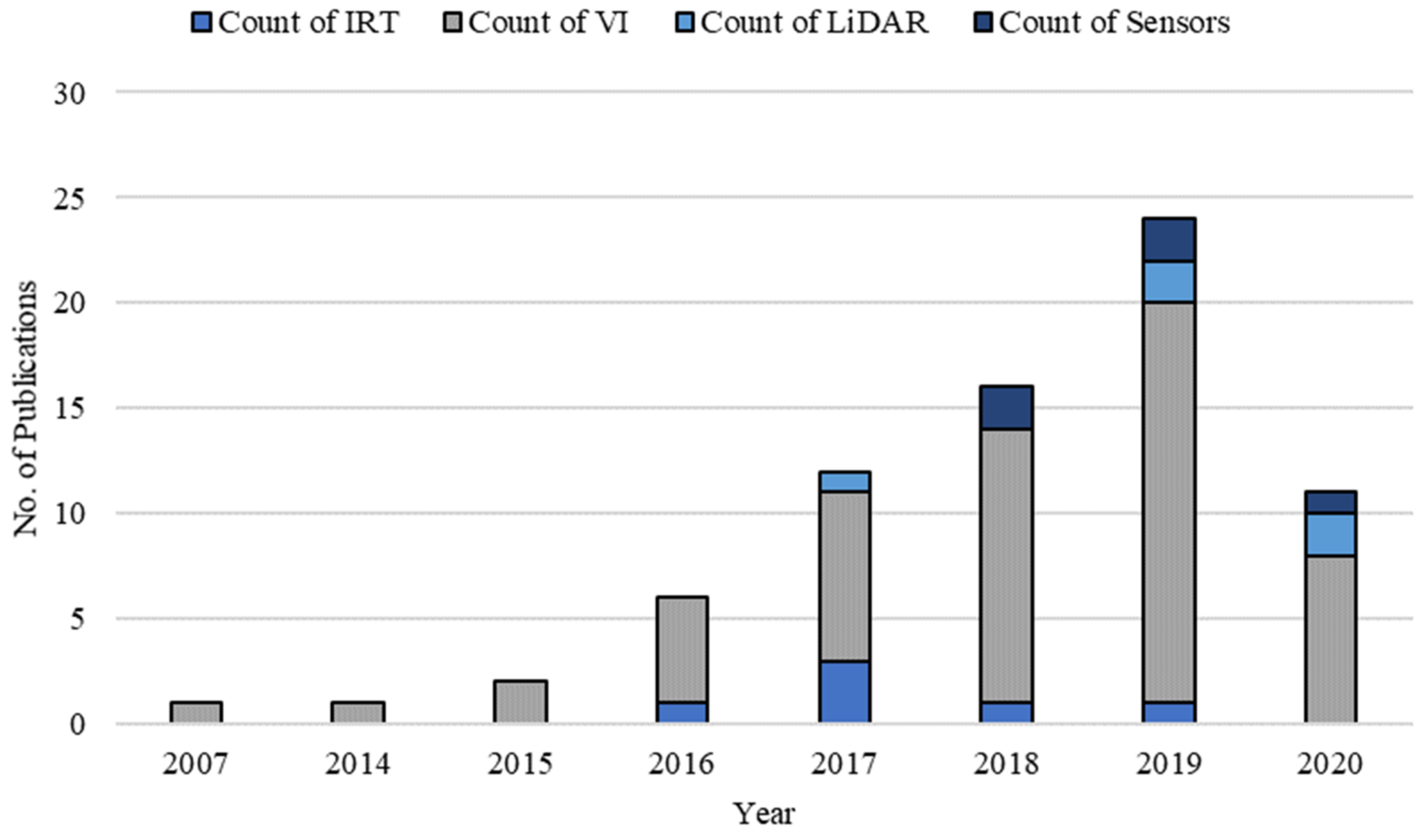
4.1. Visual Imagery
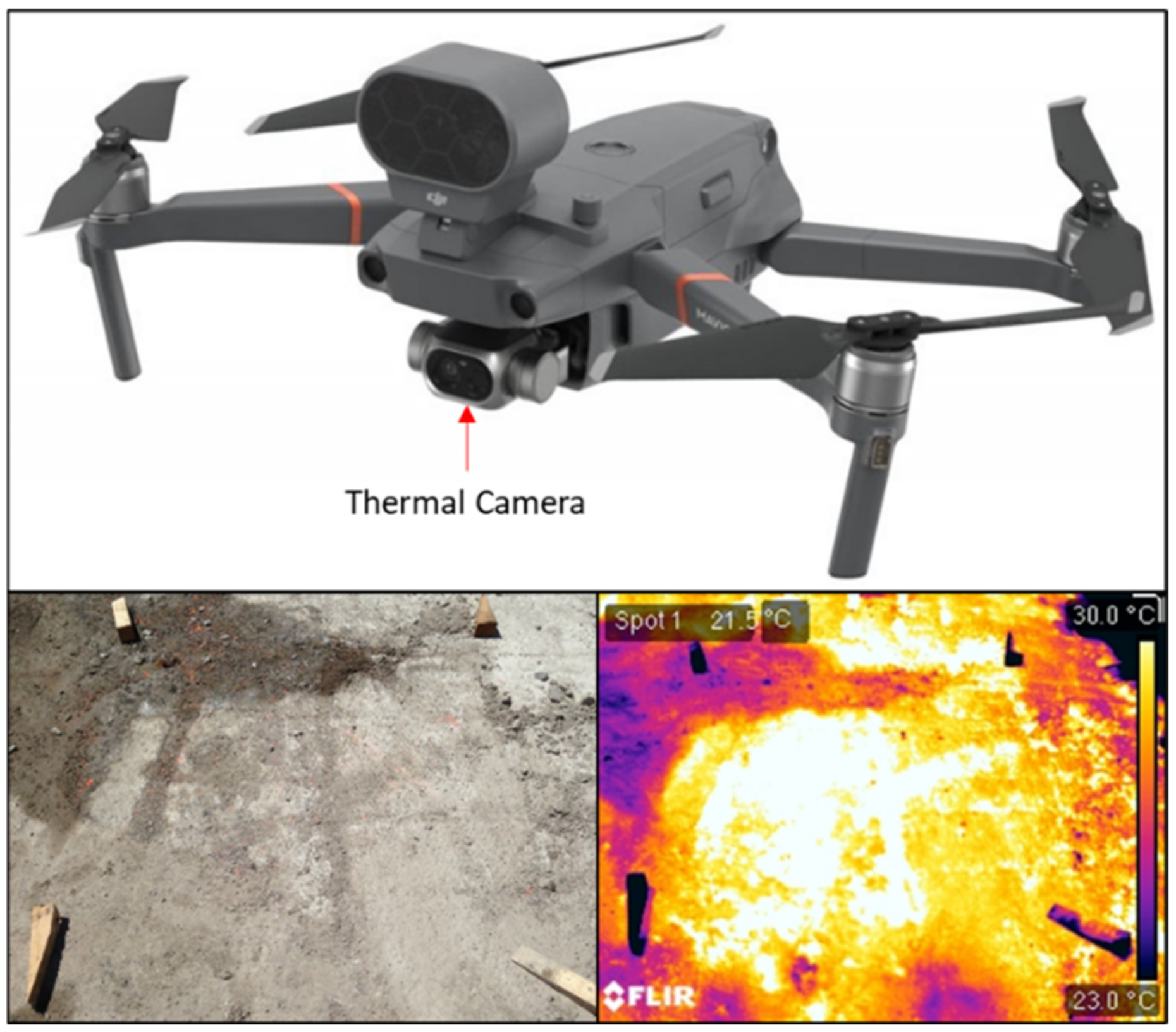
4.2. Infrared Thermography
4.3. Other Sensors
4.4. Comparative and Integrated Studies
5. Factors Affecting UAV Performance
5.1. Equipment Characteristics
5.2. Pilot Capabilities
5.3. Bridge Material and Geometry
5.4. Environment
5.5. Safety Regulations
6. Data Collection Planning
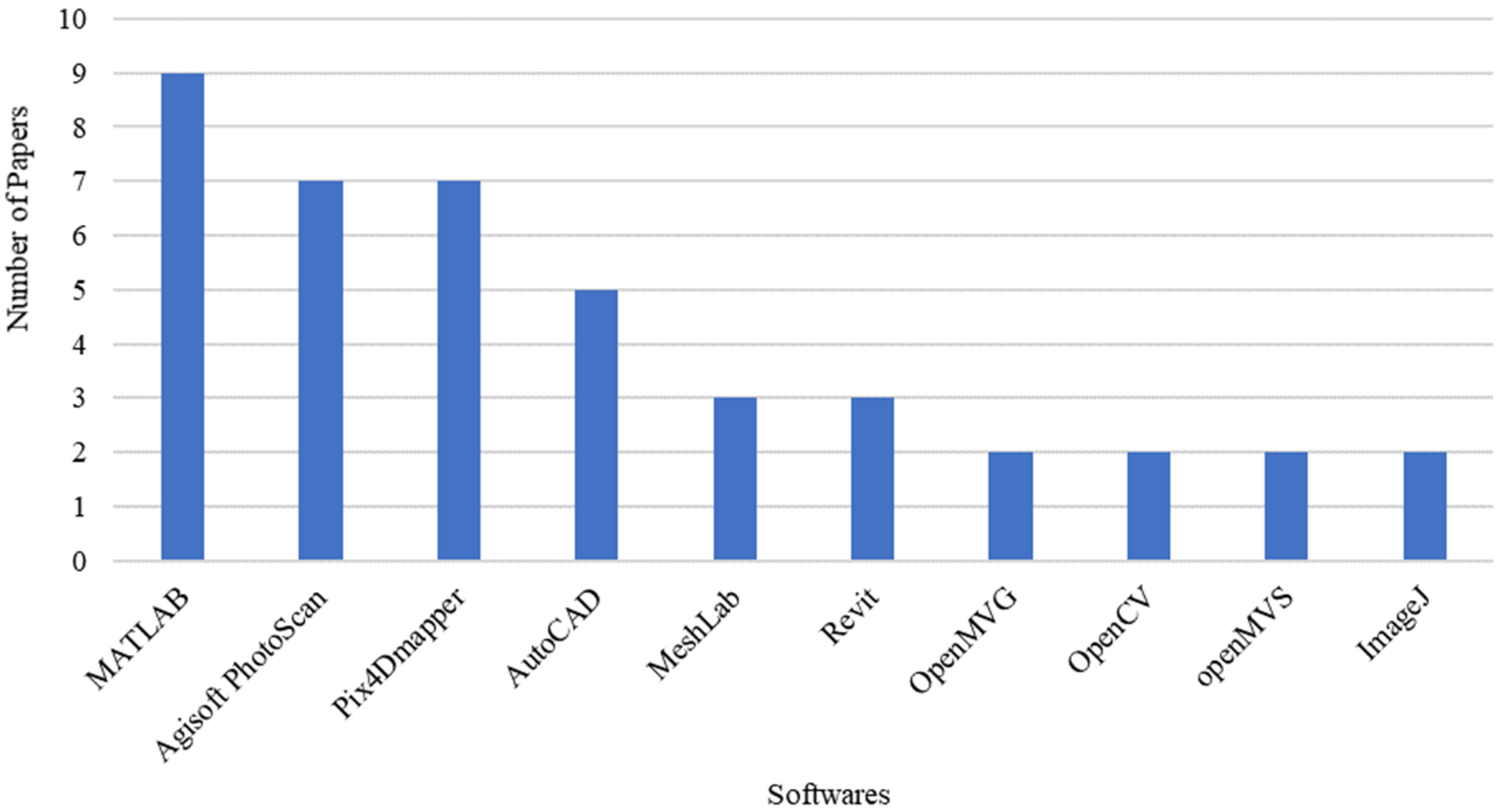
7. Data Analysis Methods
8. Cost Considerations
9. Simulation Platforms
10. Conclusions and Future Recommendations
- Lack of standard UAV-based inspection procedures compared to the standard visual inspection procedures documented in bridge inspection manuals.
- UAV path obstructions and unfavourable weather conditions, including gusts of wind and precipitation, can disallow safe and stable operations.
- Equipment constraints such as battery life and payload limitations can affect flight duration and path planning.
- UAV safety or performance may be compromised due to network instability or GPS-denied conditions.
- Line of sight constraints often necessitate the requirement of visual observers or surveillance technology when inspecting remote bridge elements.
- The review highlighted a dearth in utilizing specific NDT technologies such as the LiDAR with UAV for data collection.
- Drone assisted thermal imagery is useful for the detection of subsurface anomalies. Standard procedures/guidelines for thermography-UAV based condition monitoring of bridges are still limited in the literature.
- Additional studies required to comprehensively characterize surface and subsurface defects simultaneously which may be achieved by equipping UAVs with multiple sensors such as LiDAR, thermal and optical cameras. Additionally, assimilation of inertial and spatial sensors can generate georeferenced 3D data.
- Rigorous research required to enhance drone performance under varying weather and illumination conditions. It is critical to identify the relation between drone altitude and damage detection accuracy.
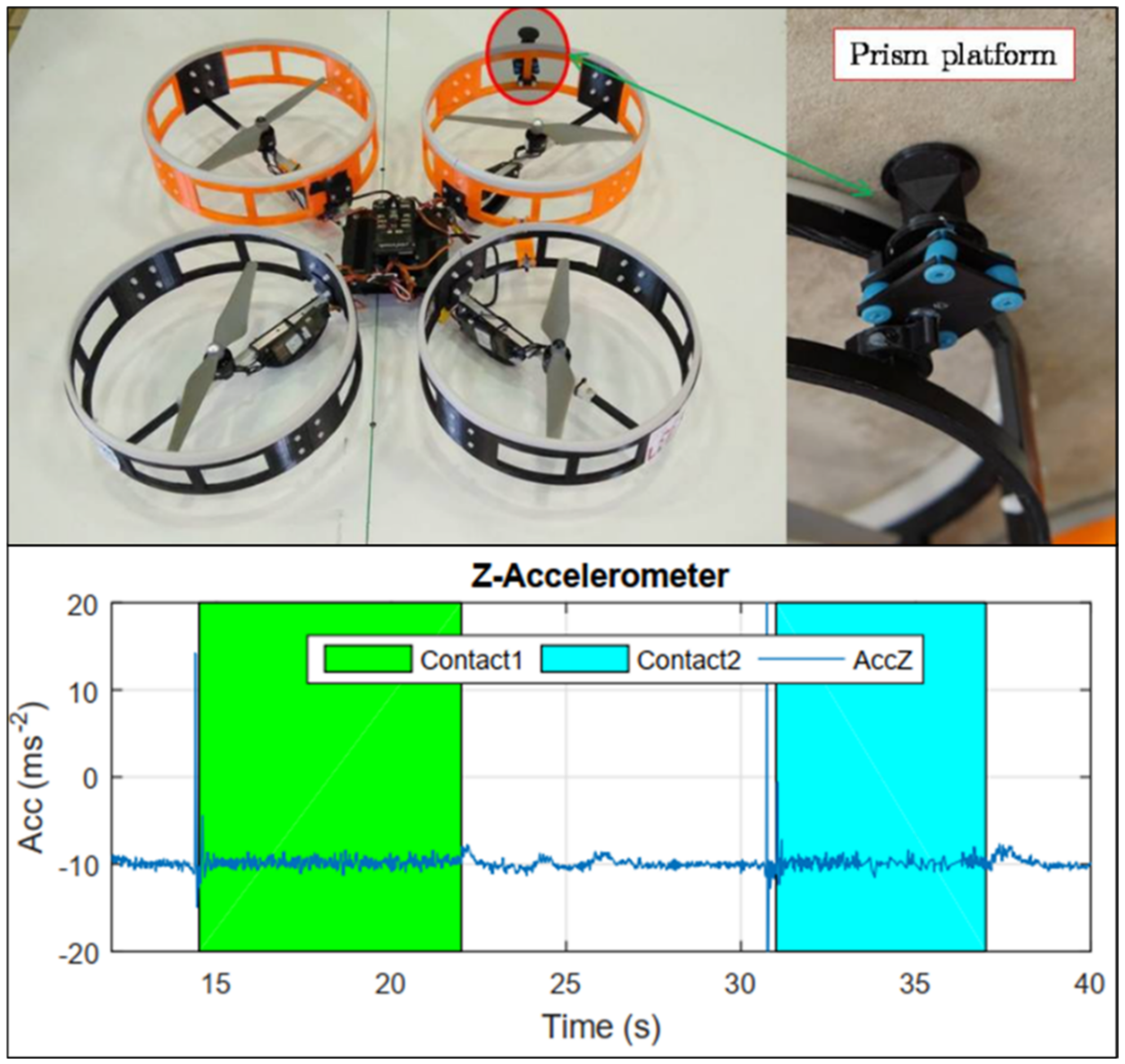
- GPS-free stabilization of UAVs and the utilization of advanced onboard visual and obstacle avoidance sensors such as multidirectional vision stability sensors as well as collision-tolerant design need to explored further in the context of bridge monitoring.
- Detailed cost–benefit analysis to clearly quantify and outline the expenses associated with UAV operation.
- More studies are needed to quantify savings associated with time and assess reduction in safety risks related to UAV implementation compared to traditional visual inspection.
- Investigation of potential of incorporation of UAV within inspection guidelines in bridge inspection manuals with specific standard procedures for data collection and analysis.
- Studying the applicability of drone-based inspection for various bridge types, materials, and geometries.
- Future studies need to further explore potential of emerging technologies such as AI and IoT techniques for autonomous data collection and processing. Examining real time data processing and also feasibility assessment of remote inspections using 5G connectivity should be explored.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Publication Type | Type of Technology | Validation | Test Object | Type of Measurement | Data Acquisition Tools | Software | Algorithm |
|---|---|---|---|---|---|---|---|---|---|
| [66] | 2019 | Journal | VI-UAV | Bridge in Ashton, Idaho | Fatigue cracks | DJI Mavic Pro sUAS/Camera/Hands-on (Under-Bridge Inspection Truck (UBIT)) | - | ||
| [71] | 2020 | Journal | VI-UAV | CAD-aided evaluation | 5 Railway Bridges//Italy | Inspecting Bridge Defects | Aibot X6 (flying hexacopter)//DOMUS Bridge Management System (BMS) (management tool) | DEEP (DEfect detection by Enhanced image Processing) developed by the authors | The condition evaluation algorithm//color-based algorithm |
| [68] | 2007 | Journal | VI-UAV | Visual inspection | Viaduct in France | Inspecting Bridge Defects | Camera//UAV//on-site experiment | - | |
| [72] | 2017 | Journal | VI-UAV | A sample structure was built to be used/ Real-world concrete structure | Defects such as the displacements and cracks | 4K resolution camera//UAV (Phantom Professional-3) | - | Speeded up robust features (SURF)-based feature detection algorithm//random sample consensus algorithm//image processing algorithm//The scale- invariant feature transform algorithm//Image stitching algorithm//random sample consensus (RANSAC) algorithm | |
| [26] | 2018 | Journal | VI-UAV | Static images; Digital display crack width measurement device | Concrete Structures | Cracks | Camera//Laser Rang Finder//UAV//IMETRUM | MATLAB | |
| [34] | 2019 | Journal | VI-UAV | - | - | Two USB cameras (Logicool C920)//UAV | - | ||
| [73] | 2019 | Journal | VI-UAV | Ground truth | Concrete panels (At lab) | Crack detection | Camera//UAV//Digi-Sense data logging light meter with NIST | MATLAB | Edge detection was carried out by six filters in the spatial (Roberts, Prewitt, Sobel, and Laplacian of Gaussian) and frequency (Butterworth and Gaussian) domains/image processing algorithms/Edge detection algorithm/crack detection algorithm |
| [51] | 2016 | Journal | IRT-UAV, VI-UAV | Rolling cart with infrared and color cameras | Bridge Deck | Detection of delamination//Cracks | GoPro Hero 3+ silver edition color camera and a FLIR Tau 2 uncooled core IR camera//UAV//Infrared and color cameras was used to validate the results obtained by the UAV. | Microsoft ICE | FLIR a325sc delamination detection algorithm/The UAV algorithm/The identification algorithm |
| [9] | 2018 | Journal | VI-UAV | Measuring tape | Timber arch bridge | Crack lengths, thicknesses, and rust stain | UAV (Dà-Jiang Innovations (DJI, Shenzhen, Guangdong) Phantom 4) | MATLAB/AutoCAD | sharpness estimation algorithm developed by Birdal (2011) |
| [35] | 2019 | Journal | VI-UAV | Visual inspection | Eight bridge inspections in North Florida | Routine Inspections, Special Inspections, and Damage Inspections. | Camera/UAV | Agisoft PhotoScan | |
| [75] | 2015 | Journal | VI-UAV | Concrete Structures (At lab) | Deformation/Corrosion/Crack | Camera (Sony NEX 7)/GoPro camera/UAV (Da-Jiang Innovations (DJI) Phantom) | MATLAB/Paint | K-means algorithm/post-processing algorithms/calibration algorithm/crack identification algorithm/texture identification algorithms/camera calibration algorithm/crack detection algorithm | |
| [53] | 2019 | Journal | VI-UAV | Bridge in Eugene, Oregon. | Conventional bridge inspection/Crack | Camera/UAS (DJI Mavic Pro)/Evaluation (Interview, Nationwide survey) | Revit/BIM 360 Glue/MATLAB/Notepad++ | image processing algorithm/machine learning algorithm | |
| [58] | 2016 | Journal | VI-UAV | Concrete-type slab bridges and concrete and steel box-girder bridges in Japan | Inspecting Bridge Defects | Rotor-type UAV (quadcopter)/PRSS UAV | VICON TRACKER | ||
| [42] | 2019 | Journal | IRT-UAV | Handheld IR camera | Concrete Specimen | Detection of Delamination | Professional handheld IR camera (H-IRC)/UAV mounted with an IR camera (UAV-IRC) | - | |
| [56] | 2017 | Journal | VI-UAV | Bridge in Japan | Detection of delamination/Cracks | 360-degree spherical camera/UAV with a multi-rotor (multicopter)/large-sized two-wheeled multi-copter | 3D CAD/2D CAD | algorithm of position estimation using RICOH THETA/the registration algorithm | |
| [27] | 2018 | Journal | VI-UAV | Historical inspection reports | Timber girder bridge structure in USA | Cracking, spalling, corrosion, and moisture on the bridge | UAV (Dà-Jiāng Innovations (DJI) Phantom 4) | PhotoScan | |
| [28] | 2020 | Journal | VI-UAV | Based on coordinate values | Model mockup bridge (Scale 1:10) | Dimensions | Digital single lens reflex (DSLR) camera/Hexacopter UAS | Ground Station/Agisoft Photoscan | |
| [25] | 2018 | Journal | VI-UAV | Human inspections | Model mock/Fall River Bridge in Ashton, Idaho | Fatigue Crack Detection | Nikon L830 Camera/GoPro camera/UAS (Mavic, Inspire & Phantom) | - | |
| [10] | 2018 | Journal | VI-UAV | Glulam, three-span timber girder bridge in Keystone, South Dakota | concrete cracks, spalling, and moisture on concrete decking, and salt deposit and moisture on timber girders | UAV (Dà-Jiāng Innovations (DJI) Phantom 4) | - | ||
| [36] | 2019 | Journal | VI-UAV | Railway bridge in Germany | Damage patterns such as cracks | Camera/UAV | Agisoft Photoscan/Pix4Dmapper/Colmap/WebODM | MVS algorithm/tailored point cloud analysis algorithms/clustering algorithm/Pseudo-algorithm/SfM algorithm/automated object recognition algorithms | |
| [31] | 2020 | Journal | VI-UAV | Steel bridges in USA | Rust distributed/local observation/Macro-observation | Camera/UAV | - | The segmentation/Edge detector algorithm, such as Prewitt, Sobel or Canny Edge Detector/lens contour extraction algorithm | |
| [24] | 2019 | Journal | VI-UAV | Vernier caliper, crack ruler, hand-held DSLR | Bridge Deck | cracks | Camera/UAV | openMVS/C++ | |
| [70] | 2020 | Journal | TLS-UAV | Bridge in Alberta, Canada | Bridge surface defects such as cracks | LiDAR-equipped UAV (MIT RANGE/Bigone 8 Hsepro LiDAR) | Unity 3D/ CSiBridge /Revit 2017 | Genetic Algorithm (GA) and A* algorithm, path length matrix calculation | |
| [30] | 2017 | Journal | VI-UAV | Reinforced concrete bridges (Boğaçayı Bridge in Antalya, Turkey) | Bridge modelling | Camera/UAV | SAP2000 | Three-Dimensional Finite Element model | |
| [74] | 2018 | Journal | VI-UAV | concrete cracks inspection experiment | cracks | Quadrotor UAV | - | Edge detection algorithms such as Canny algorithm, Prewitt algorithm, and Sobel algorithm/Robert algorithm/The LoG algorithm/K-means clustering algorithm | |
| [45] | 2019 | Journal | Sensor-UAV | linear variable differential transducers (LVDTs) | Railroad bridges | Transverse bridge displacement measurement | Vibrometer sensor/OFV-534 LDV by Polytec/UAS | - | Algorithms based on trigonometric principles to compensate for the motion of the vibrometer |
| [83] | 2019 | Journal | VI-UAV | Bridge over the Basento river in Potenza, Italy | 3D modelling | Camera/commercial UAV DJI Mavic Pro/photographic sensors/laser scanner | Photoscan/Pix4d/MeshLab/Rhinoceros v6/Mesh2Surface | Structure from Motion (SFM)/SIFT/Poisson disk/Poisson surface reconstruction | |
| [46] | 2018 | Journal | Sensor-UAV | Manual tap testing | Railroad bridge structural | Structural integrity of concrete. | TASCAMDR-44 WL digital recorder/Four external microphones/UAV (DJI Phantom multirotor) | - | The machine learning algorithm/variety of structural integrity algorithm |
| [41] | 2017 | Journal | IRT-UAV, VI-UAV | Hammer sounding; HCP testing | Concrete bridge decks | Cracks | IRT camera (FLIR Vue Pro)/UAV/IPad Mini 4 device | Matlab/FLIR/ImageJ/Pix4D mapper/Excel | Stitching algorithm/k-means clustering algorithm/image segmentation algorithm |
| [47] | 2018 | Journal | Sensor-UAV | Floor slab of a bridge | Bridge surface defects such as cracks | 8 Rotor UAV/3 DoF manipulator/Camera | Architecture (Developed by the authors) | ||
| [32] | 2018 | Journal | VI-UAV | Pinned-connected steel truss bridge | Displacement Measurement | 6 DOF camera motion/UAS (DJI Phantom 3 Professional) | - | Template-matching algorithms/optical flow-based tracking algorithm | |
| [38] | 2019 | Journal | VI-UAV | TLS | Boyne Viaduct Bridge in Drogheda, Ireland | 3D Reconstructions/Damage Evaluation | 12-megapixel digital camera/UAV (DJI Phantom 4)/Laser scanner | VisualSFM/OpenMVG/PhotoScan/Pix4D/PhotoScan | The iterative closest point (ICP) algorithm/Autoclustering algorithm, such as k- means or DBSCAN. |
| [37] | 2017 | Journal | VI-UAV | TLS | Placer River Bridge in North America | 3D Reconstructions | Camera (Sony NEX-7)/UAV (DJI S800 airframe) | GCS software /Agisoft Photoscan/ | Hierarchical Dense Structure-from-Motion algorithm/Fast Approximate Nearest Neighbours (FANN) algorithm/the eight-point algorithm/global pixel-wise image-matching algorithm/Semi-global Matching (SGM)/Perspective-n-Point (PnP) algorithm |
| [33] | 2014 | Journal | VI-UAV | X-box Kinect, TRITOP | Pedestrian bridge | Bridge surface defects such as cracks and deformation | Camera/UAV (Parrot AR 2.0)/Apple iPod touch | Matlab | A computational algorithm/Kinect MATLAB algorithm/ Unmanned aerial vehicle MATLAB algorithm/image processing algorithm |
| [29] | 2018 | Journal | VI-UAV | Bridge in Switzerland. | 3D Reconstructions | 12.4-megapixel Zenmuse X3 camera/UAV (DJI Inspire 1) | OpenCV/OpenFOAM /openMVG/openMVS/Blender/swiftSnap/ParaView | Patch-Match algorithm/Structure from Motion (SfM) photogrammetric algorithms/implemented surface reconstruction algorithm | |
| [57] | 2017 | Journal | VI-UAV | Four bridges | General bridge inspections | Camera/SenseFly albris UAS/Rope access inspection | - | ||
| [76] | 2019 | Journal | VI-UAV | Little Golden Gate Bridge in Mahomet, USA | Displacement data | Camera/UAV | - | Natural excitation technique for the eigen-system realization algorithm (NeXT ERA)/Levenberg–Marquardt Algorithm/marker detection algorithm | |
| [50] | 2017 | Journal | IRT-UAV, VI-UAV, TLS-UAV | Segmental box-girder bridge | Digital 3D reconstruction | UAS/LiDAR sensor | WebGIS/PostGIS/PostgreSQL | Structure-from-motion algorithms/automated crack-detection algorithms | |
| [79] | 2018 | Journal | VI-UAV | Old concrete bridge | Crack Identification | Camera/UAV (Inspire 2 with Zenmuse X5S) | Pix4D Mapper/AutoCAD 2017 | Deep learning algorithm/vector machine (SVM) algorithm/image pyramid algorithm the region of interest (ROI) algorithm/the Sobel edge detection/The CNN training algorithm using Cifar-10 data/crack quantification algorithm | |
| [44] | 2020 | Journal | VI-UAV, TLS-UAV | Navas bridge at Algodonales, Cadiz, Spain | General bridge inspection | UAV (DJI 2312E rotors) | Architecture Diagram Software | ||
| [69] | 2020 | Journal | VI-UAV | Laser scanner, terrestrial photogrammetry, total station, levelling, displacement sensors | Bridge in Altrier, Luxembourg | Damage localisation | Drone DJI Matrice 600/camera Fujifilm GFX50S /laser scanner (Leica P20)/total station (Leica TS30 and Leica TS60)/levelling (Leica DNA 03)/displacement sensors (Two displacement sensors from HBM)/Photogrammetry (full-frame camera Nikon D800) | Elcovision 10/Sofistik | |
| [67] | 2018 | Journal | VI-UAV | TLS, total station-theodolites | Bridge of the Saracens in Adrano, Italy (Ancient arched brick) | Reconstruction of 3D surfaces | Camera (GoPro Hero 4)/UAV Hexacopter with Lipo 4S cells | Pix4Mapper/Pix4Dmapper version 3/MeshLab/Flying software (Arducopter 3.1.5) | ICP algorithm/Structure-From-Motion (SfM) algorithms/Area Based Matching (ABM) |
| [39] | 2019 | Journal | VI-UAV | TLS | Bridge of the Han River, Korea | 3D modeling | Terrestrial LiDAR/UAV/Camera | Trimble Real Works (TRW)/UAS Master | |
| [85] | 2018 | Journal | VI-UAV | The Ponte delle Torri masonry bridge in Spoleto, Italy. | 3D modeling (Geometry)/Crack pattern | Multicopter SenseFly Exom drone equipped with ultrasonic and circular vision sensors | ARTeMIS Modal Pro/PhotoScan/Abaqus | Crystal Clear SSI algorithm | |
| [77] | 2015 | Journal | VI-UAV | Tape measurements | Pedestrian bridge/Artificial structures (Lab) | 3D reconstruction | Camera/UAS/LADAR | MeshLab/123D Catch/OpenCV/Arc3D/clustering views for multi view stereo (CMVS)/OpenGL graphics API/SURF | The IM reconstruction algorithm |
| [43] | 2019 | Journal | VI-UAV, Sensor-UAV | Two bridges with different features | General bridge inspection | Camera/UAS/total station/manual contact | - | ||
| [52] | 2020 | Journal | VI-UAV, Sensor-UAV | Visual inspection | Laboratory-scale concrete shear wall/Bridge structure | Damage localization | Camera (Sony A9)/UAS/1D LiDAR | - | The mask R-CNN algorithm |
| [49] | 2017 | Journal | IRT-UAV, VI-UAV | Hammer sounding | Two bridge deck surfaces in Detroit, Michigan | Concrete delaminations | Thermal infrared imaging camera (FLIR)/Nikon D800, digital single-lens reflex (DSLR) camera/UAV (Bergen hexacopter) | Matlab | The classification algorithm/the mapping algorithm/sophisticated analysis algorithms, |
| [78] | 2019 | Journal | VI-UAV | Two bridges in China | 3D Reconstruction of Structural Surface | Camera/UAV | EOS PhotoModeler Scanner/Agisoft PhotoScan | SfM algorithm/Poisson surface reconstruction/the Min-cut algorithm/voxel-based segmentation algorithms/Region Growing (RG) algorithm/Locally Convex Connected Patches (LCCP) algorithm | |
| [86] | 2019 | Conference | VI-UAV, TLS-UAV | San Cono’s bridge (masonry bridge) in Bianco river, Italy | 3D Reconstruction | Camera/UAV | Pictran-D digital photogrammetric/Agisoft Photoscan/Mission Planner/Rhinoceros/GTS NX structural software | ||
| [87] | 2016 | Conference | VI-UAV | Artificial structures (Lab) | Performance and damages for civil structures | Camera/UAV Bebop Drone | Matlab | Speeded up Robust Features (SURF) Based Feature Detection Algorithm/The stitching algorithm/Autonomous crack identification algorithm/Image registration algorithm/RANdom Sample Consensus (RANSAC) | |
| [80] | 2018 | Conference | VI-UAV | Different concrete surfaces | Detect cracks on concrete surfaces | Camera/UAV | - | Crack detection modelrelies on a deep learning convolutional neural network (CNN) image classification algorithm/machine learning-based algorithm for crack detection | |
| [88] | 2018 | Conference | IRT-UAV, VI-UAV | Existing bridge and pavement in USA | Damage classification and condition assessment. | UAV carrying high resolution camera and infrared thermography camera/Raspberry Pi camera/DJI Phantom 4 Pro Drone | - | Robust algorithm | |
| [89] | 2019 | Conference | VI-UAV | Bridge on the Danube River in Novi Sad | Data collectionto record the progress during the construction | Camera/UAV (DJI Phantom 4 Advanced Pro,) | - | ||
| [90] | 2020 | Conference | VI-UAV | Simulated bridge | General bridge inspection | - | Unity game engine | Augmented reality (AR) (Virtual reality environment) | |
| [91] | 2019 | Conference | VI-UAV | Artificial structures (Lab) | measure 2D and 3D shape and deformation fields in structures | Arduino along with a LIDAR/Computer (Microsoft Surface 3)/Quadrotor UAV (DJI Matrice 100 UAV with Stereo-DIC system)/Camera /OptiTrack motion capture system | VIC-3D | ||
| [92] | 2019 | Conference | VI-UAV | Clifton Suspension Bridge | General bridge inspection | UAV (Hexacopter)/Lightware LW20C lightweight LIDAR | QGIS/eCalc/CAD | ||
| [84] | 2020 | Conference | VI-UAV | Indoor Girder Inspection (lab)/Four-span timber slab bridge located in Pipestone, Minnesota | Identify and quantify damage | UAV (DJI Matrice 210)/Gimbal camera | ImageJ/Python 5.0.1 | Conventional image analysis algorithm/DIC algorithm | |
| [93] | 2019 | Conference | VI-UAV, TLS-UAV | Bridge in Benevento, Italy/Concrete bridge | Damage assessment/Real dimensions of structural elements. | Drones/Camera/LIDAR | Pix4D | ||
| [94] | 2016 | Conference | VI-UAV | Railway infrastructure system | structural faults/security threat detection/consequences of natural hazards/intentional attacks | Drones/Camera /sensors | - | Motion tracking algorithm/Robust algorithm | |
| [95] | 2019 | Conference | VI-UAV | Bridge in USA | Crack Detection/3D object reconstruction | UAS (DJI S900 hexacopter with a payload of 6.8 Kg)/ZED Stereo Camera | - | ||
| [96] | 2016 | Conference | VI-UAV | Bridge crossing the Duck pond, Korea | General bridge inspection | USV/GPS/IMU/laser distance finder (Hokuyo UST-10LX) | - |
References
- Abu Dabous, S.; Alkass, S. Managing bridge infrastructure under budget constraints: A decision support methodology. Can. J. Civ. Eng. 2011, 38, 1227–1237. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. Status of the Nation’s Highways, Bridges, and Transit: Conditions and Performance; U.S. Department of Transportation: Washington, DC, USA, 2015.
- Cook, W.; Barr, P.J.; Halling, M.W. Bridge Failure Rate. J. Perform. Constr. Facil. 2015, 29, 04014080. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Feroz, S. Condition monitoring of bridges with non-contact testing technologies. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. NDT Documentation and Evaluation of the Roman Bridge of Lugo Using GPR and Mobile and Static LiDAR. J. Perform. Constr. Facil. 2015, 29, 06014004. [Google Scholar] [CrossRef]
- Oh, J.-K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.-J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Struct. Health Monit. 2018, 17, 1056–1072. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Kivi, S.S.; Abdolvand, M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Duque, L.; Seo, J.; Wacker, J. Bridge Deterioration Quantification Protocol Using UAV. J. Bridge Eng. 2018, 23, 04018080. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J.P. Field Application of UAS-Based Bridge Inspection. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 72–81. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in Civil Infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Sony, S.; LaVenture, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M. Bridge inspection: Human performance, unmanned aerial systems and automation. J. Civ. Struct. Health Monit. 2018, 8, 443–476. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Jeong, E.; Seo, J.; Wacker, J. Literature Review and Technical Survey on Bridge Inspection Using Unmanned Aerial Vehicles. J. Perform. Constr. Facil. 2020, 34, 04020113. [Google Scholar] [CrossRef]
- Chan, B.; Guan, H.; Jo, J.; Blumenstein, M. Towards UAV-based bridge inspection systems: A review and an application perspective. Struct. Monit. Maint. 2015, 2, 283–300. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Agnisarman, S.; Lopes, S.; Madathil, K.C.; Piratla, K.; Gramopadhye, A. A survey of automation-enabled human-in-the-loop systems for infrastructure visual inspection. Autom. Constr. 2019, 97, 52–76. [Google Scholar] [CrossRef]
- Ahmed, H.; La, H.M.; Gucunski, N. Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms. Sensors 2020, 20, 3954. [Google Scholar] [CrossRef]
- Yaacoub, J.-P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Hill, A.C.; Laugier, E.J.; Casana, J. Archaeological Remote Sensing Using Multi-Temporal, Drone-Acquired Thermal and Near Infrared (NIR) Imagery: A Case Study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690. [Google Scholar] [CrossRef]
- Liu, Y.; Nie, X.; Fan, J.; Liu, X. Image-based crack assessment of bridge piers using unmanned aerial vehicles and three-dimensional scene reconstruction. Comput. Civ. Infrastruct. Eng. 2019, 35, 511–529. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Fatigue Crack Detection Using Unmanned Aerial Systems in Fracture Critical Inspection of Steel Bridges. J. Bridge Eng. 2018, 23, 04018078. [Google Scholar] [CrossRef]
- Zhong, X.; Peng, X.; Yan, S.; Shen, M.; Zhai, Y. Assessment of the feasibility of detecting concrete cracks in images acquired by unmanned aerial vehicles. Autom. Constr. 2018, 89, 49–57. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Jalinoos, F.; Amjadian, M.; Agrawal, A.K.; Brooks, C.; Banach, D. Experimental Evaluation of Unmanned Aerial System for Measuring Bridge Movement. J. Bridge Eng. 2020, 25, 04019132. [Google Scholar] [CrossRef]
- Hackl, J.; Adey, B.T.; Woźniak, M.; Schümperlin, O. Use of Unmanned Aerial Vehicle Photogrammetry to Obtain Topographical Information to Improve Bridge Risk Assessment. J. Infrastruct. Syst. 2018, 24, 04017041. [Google Scholar] [CrossRef]
- Özcan, O. Multi-Hazard Assessment of RC Bridges using Unmanned Aerial Vehicle-Based Measurements. Balt. J. Road Bridge Eng. 2018, 13, 192–208. [Google Scholar] [CrossRef]
- Marchewka, A.; Ziółkowski, P.; Aguilar-Vidal, V. Framework for Structural Health Monitoring of Steel Bridges by Computer Vision. Sensors 2020, 20, 700. [Google Scholar] [CrossRef]
- Yoon, H.; Shin, J.; Spencer, B.F. Structural Displacement Measurement Using an Unmanned Aerial System. Comput. Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Ellenberg, A.; Branco, L.; Krick, A.; Bartoli, I.; Kontsos, A. Use of Unmanned Aerial Vehicle for Quantitative Infrastructure Evaluation. J. Infrastruct. Syst. 2015, 21, 04014054. [Google Scholar] [CrossRef]
- Hidaka, K.; Fujimoto, D.; Sato, K. Autonomous Adaptive Flight Control of a UAV for Practical Bridge Inspection Using Multiple-Camera Image Coupling Method. J. Robot. Mechatron. 2019, 31, 845–854. [Google Scholar] [CrossRef]
- Tomiczek, A.P.; Whitley, T.J.; Bridge, J.A.; Ifju, P.G. Bridge Inspections with Small Unmanned Aircraft Systems: Case Studies. J. Bridge Eng. 2019, 24, 05019003. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N.; Kersten, J.; Taraben, J.; Debus, P.; Helmrich, M.; Rodehorst, V. Framework for automated UAS-based structural condition assessment of bridges. Autom. Constr. 2019, 97, 77–95. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D.; Cunningham, K.; Dell’Andrea, R.; Riley, M. Unmanned aerial vehicle inspection of the Placer River Trail Bridge through image-based 3D modelling. Struct. Infrastruct. Eng. 2018, 14, 124–136. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.F.; Mangina, E.; Zolanvari, S.M.I.; Byrne, J. UAV Bridge Inspection through Evaluated 3D Reconstructions. J. Bridge Eng. 2019, 24, 05019001. [Google Scholar] [CrossRef]
- Lee, K.W.; Park, J.K. Modeling and Management of Bridge Structures Using Unmanned Aerial Vehicle in Korea. Sens. Mater. 2019, 31, 3765. [Google Scholar] [CrossRef]
- Lu, Y.; Golrokh, A.J.; Islam, A. Concrete Pavement Service Condition Assessment Using Infrared Thermography. Adv. Mater. Sci. Eng. 2017, 2017, 1–8. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Remote sensing of concrete bridge decks using unmanned aerial vehicle infrared thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Mac, V.H.; Tran, Q.H.; Huh, J.; Doan, N.S.; Kang, C.; Han, D. Detection of Delamination with Various Width-to-depth Ratios in Concrete Bridge Deck Using Passive IRT: Limits and Applicability. Materials 2019, 12, 3996. [Google Scholar] [CrossRef]
- Sanchez-Cuevas, P.J.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic System for Inspection by Contact of Bridge Beams Using UAVs. Sensors 2019, 19, 305. [Google Scholar] [CrossRef]
- Jimenez-Cano, A.E.; Sanchez-Cuevas, P.J.; Grau, P.; Ollero, A.; Heredia, G. Contact-Based Bridge Inspection Multirotors: Design, Modeling, and Control Considering the Ceiling Effect. IEEE Robot. Autom. Lett. 2019, 4, 3561–3568. [Google Scholar] [CrossRef]
- Garg, P.; Moreu, F.; Ozdagli, A.; Taha, M.R.; Mascareñas, D. Noncontact Dynamic Displacement Measurement of Structures Using a Moving Laser Doppler Vibrometer. J. Bridge Eng. 2019, 24, 04019089. [Google Scholar] [CrossRef]
- Moreu, F.; Ayorinde, E.; Mason, J.; Farrar, C.; Mascarenas, D. Remote railroad bridge structural tap testing using aerial robots. Int. J. Intell. Robot. Appl. 2018, 2, 67–80. [Google Scholar] [CrossRef]
- Ikeda, T.; Yasui, S.; Minamiyama, S.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Stable impact and contact force control by UAV for inspection of floor slab of bridge. Adv. Robot. 2018, 32, 1061–1076. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Yaghi, S.; Alkass, S.; Moselhi, O. Concrete bridge deck condition assessment using IR Thermography and Ground Penetrating Radar technologies. Autom. Constr. 2017, 81, 340–354. [Google Scholar] [CrossRef]
- Escobar-Wolf, R.; Oommen, T.; Brooks, C.N.; Dobson, R.J.; Ahlborn, T.M. Unmanned Aerial Vehicle (UAV)-Based Assessment of Concrete Bridge Deck Delamination Using Thermal and Visible Camera Sensors: A Preliminary Analysis. Res. Nondestruct. Eval. 2017, 29, 183–198. [Google Scholar] [CrossRef]
- Eschmann, C.; Wundsam, T. Web-Based Georeferenced 3D Inspection and Monitoring of Bridges with Unmanned Aircraft Systems. J. Surv. Eng. 2017, 143, 04017003. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge deck delamination identification from unmanned aerial vehicle infrared imagery. Autom. Constr. 2016, 72, 155–165. [Google Scholar] [CrossRef]
- Yoon, S.; Gwon, G.-H.; Lee, J.-H.; Jung, H.-J. Three-dimensional image coordinate-based missing region of interest area detection and damage localization for bridge visual inspection using unmanned aerial vehicles. Struct. Health Monit. 2020, 1, 14. [Google Scholar] [CrossRef]
- Xu, Y.; Turkan, Y. BrIM and UAS for bridge inspections and management. Eng. Constr. Archit. Manag. 2019, 27, 785–807. [Google Scholar] [CrossRef]
- FAA. Remote Pilot—Small Unmanned Aircraft Systems Study Guide; Federal Aviation Administration (FAA): Washington, DC, USA, 2016.
- Cardosi, K.; Lennertz, T. Human Factors Considerations for the Integration of Unmanned Aerial Vehicles in the National Airspace System: An Analysis of Reports Submitted to the Aviation Safety Reporting System (ASRS); U.S. Department of Transportation, Federal Aviation Administration Emerging Technologies: Washington, DC, USA, 2017.
- Hada, Y.; Nakao, M.; Yamada, M.; Kobayashi, H.; Sawasaki, N.; Yokoji, K.; Kanai, S.; Tanaka, F.; Date, H.; Pathak, S.; et al. Development of a Bridge Inspection Support System Using Two-Wheeled Multicopter and 3D Modeling Technology. J. Disaster Res. 2017, 12, 593–606. [Google Scholar] [CrossRef]
- Wells, J.L.; Lovelace, B.; Kalar, T. Use of Unmanned Aircraft Systems for Bridge Inspections. Transp. Res. Rec. J. Transp. Res. Board 2017, 2612, 60–66. [Google Scholar] [CrossRef]
- Salaan, C.J.O.; Okada, Y.; Mizutani, S.; Ishii, T.; Koura, K.; Ohno, K.; Tadokoro, S. Close visual bridge inspection using a UAV with a passive rotating spherical shell. J. Field Robot. 2018, 35, 850–867. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Unmanned Aircraft Systems (UAS). Available online: https://www.icao.int/safety/UA/Pages/Unmanned-Aircraft-Systems-Advisory-Group-(UAS-AG).aspx#:~:text=The%20Unmanned%20Aircraft%20Systems%20Advisory,as%20well%20as%20the%20Member (accessed on 15 December 2020).
- International Civil Aviation Organization. Unmanned Aircraft Systems Advisory Group. Available online: https://www.icao.int/safety/UA/Pages/Unmanned-Aircraft-Systems-Advisory-Group-(UAS-AG).aspx (accessed on 15 December 2020).
- Civil Aviation Safety Authority. Unmanned Aircraft and Rockets. Available online: https://en.wikipedia.org/wiki/Regulation_of_unmanned_aerial_vehicles#cite_note-kaur-6 (accessed on 15 December 2020).
- National Civil Aviation Agency. Brazilian Special Civil Aviation Regulation. Available online: https://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-94 (accessed on 21 December 2020).
- MLIT. Japan’s Safety Rules on Unmanned Aircraft (UA)/Drones. Available online: https://www.mlit.go.jp/en/koku/uas.html (accessed on 25 December 2020).
- Irish Aviation Authority. Operation of Remotely Piloted Aircraft Systems in Irish Airspace. Available online: https://www.iaa.ie/news/2015/11/13/remote-piloted-aircraft-systems-use-grows-in-ireland (accessed on 15 December 2020).
- Directorate General of Civil Aviation. DGCA RPAS Guidance Manual; Directorate General of Civil Aviation: New Delhi, India, 2019.
- Dorafshan, S.; Thomas, R.J.; Coopmans, C.; Maguire, M. A Practitioner’s Guide to Small Unmanned Aerial Systems for Bridge Inspection. Infrastructures 2019, 4, 72. [Google Scholar] [CrossRef]
- Calì, M.; Ambu, R. Advanced 3D Photogrammetric Surface Reconstruction of Extensive Objects by UAV Camera Image Acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Erdenebat, D.; Waldmann, D. Application of the DAD method for damage localisation on an existing bridge structure using close-range UAV photogrammetry. Eng. Struct. 2020, 218, 110727. [Google Scholar] [CrossRef]
- Bolourian, N.; Hammad, A. LiDAR-equipped UAV path planning considering potential locations of defects for bridge inspection. Autom. Constr. 2020, 117, 103250. [Google Scholar] [CrossRef]
- Potenza, F.; Rinaldi, C.; Ottaviano, E.; Gattulli, V. A robotics and computer-aided procedure for defect evaluation in bridge inspection. J. Civ. Struct. Health Monit. 2020, 10, 471–484. [Google Scholar] [CrossRef]
- Akbar, M.A.; Qidwai, U.; Jahanshahi, M.R. An evaluation of image-based structural health monitoring using integrated unmanned aerial vehicle platform. Struct. Control Health Monit. 2019, 26, e2276. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Benchmarking Image Processing Algorithms for Unmanned Aerial System-Assisted Crack Detection in Concrete Structures. Infrastructures 2019, 4, 19. [Google Scholar] [CrossRef]
- Lei, B.; Wang, N.; Xu, P.; Song, G. New Crack Detection Method for Bridge Inspection Using UAV Incorporating Image Processing. J. Aerosp. Eng. 2018, 31, 04018058. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge related damage quantification using unmanned aerial vehicle imagery. Struct. Control Health Monit. 2016, 23, 1168–1179. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.-W.; Yoon, H.; Spenser, B.F., Jr. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Lattanzi, D.; Miller, G.R. 3D Scene Reconstruction for Robotic Bridge Inspection. J. Infrastruct. Syst. 2015, 21, 04014041. [Google Scholar] [CrossRef]
- Pan, Y.; Dong, Y.; Wang, D.; Chen, A.; Ye, Z. Three-Dimensional Reconstruction of Structural Surface Model of Heritage Bridges Using UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1204. [Google Scholar] [CrossRef]
- Kim, I.-H.; Jeon, H.; Baek, S.-C.; Hong, W.-H.; Jung, H.-J. Application of Crack Identification Techniques for an Aging Concrete Bridge Inspection Using an Unmanned Aerial Vehicle. Sensors 2018, 18, 1881. [Google Scholar] [CrossRef]
- De Silva, W.R.L.; De Lucena, D.S. Concrete Cracks Detection Based on Deep Learning Image Classification. Proceedings 2018, 2, 489. [Google Scholar] [CrossRef]
- Bridge, J.A.; Ifju, P.G.; Whitley, T.J.; Tomiczek, A.P. Use of Small Unmanned Aerial Vehicles for Structural Inspection; Florida Department of Transportation: Tallahassee, FL, USA, 2018.
- Rashidi, M.; Samali, B. Health Monitoring of Bridges Using RPAs; Wang, C.M., Dao, V., Kitipornchai, S., Eds.; EASEC16, Lecture Notes in Civil Engineering; Springer: Singapore, 2021; Volume 101. [Google Scholar]
- Marmo, F.; DeMartino, C.; Candela, G.; Sulpizio, C.; Briseghella, B.; Spagnuolo, R.; Xiao, Y.; Vanzi, I.; Rosati, L. On the form of the Musmeci’s bridge over the Basento river. Eng. Struct. 2019, 191, 658–673. [Google Scholar] [CrossRef]
- Jeong, E.; Seo, J.; Wacker, J. New Bridge Inspection Approach with Joint UAV and DIC System. In Structures Congress 2020; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2020; pp. 349–359. [Google Scholar]
- Roselli, I.; Malena, M.; Mongelli, M.; Cavalagli, N.; Gioffrè, M.; De Canio, G.; De Felice, G. Health assessment and ambient vibration testing of the “Ponte delle Torri” of Spoleto during the 2016–2017 Central Italy seismic sequence. J. Civ. Struct. Health Monit. 2018, 8, 199–216. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D.; Crocetto, N.; Garofalo, A.R. 3D modeling of roman bridge by the Integration of terrestrial and UAV photogrammetric survey for structural analysis purpose. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 249–255. [Google Scholar] [CrossRef]
- Aliakbar, M.; Qidwai, U.; Jahanshahi, M.R.; Masri, S.; Shen, W.-M. Progressive image stitching algorithm for vision based automated inspection. In Proceedings of the 2016 International Conference on Machine Learning and Cybernetics (ICMLC), Jeju, Korea, 10–13 July 2016; Volume 1, pp. 337–343. [Google Scholar]
- Wu, W.; Qurishee, M.A.; Owino, J.; Fomunung, I.; Onyango, M.; Atolagbe, B. Coupling Deep Learning and UAV for Infrastructure Condition Assessment Automation. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; pp. 1–7. [Google Scholar]
- Obradovic, R.; Vasiljevic, I.; Kovacevic, D.; Marinkovic, Z.; Farkas, R. Drone Aided Inspection during Bridge Construction. In Proceedings of the 2019 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 29–30 May 2019; pp. 1–4. [Google Scholar]
- Van Dam, J.; Krasner, A.; Gabbard, J.L. Drone-based Augmented Reality Platform for Bridge Inspection: Effect of AR Cue Design on Visual Search Tasks. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA, USA, 22–26 March 2020; pp. 201–204. [Google Scholar]
- Kalaitzakis, M.; Kattil, S.R.; Vitzilaios, N.; Rizos, D.; Sutton, M. Dynamic Structural Health Monitoring using a DIC-enabled drone. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 321–327. [Google Scholar]
- Goudarzi, H.; Hine, D.; Richards, A. Mission Automation for Drone Inspection in Congested Environments. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 305–314. [Google Scholar]
- Ciampa, E.; De Vito, L.; Pecce, M.R. Practical issues on the use of drones for construction inspections. J. Phys. Conf. Ser. 2019, 1249, 012016. [Google Scholar] [CrossRef]
- Flammini, F.; Pragliola, C.; Smarra, G. Railway infrastructure monitoring by drones. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar]
- Benkhoui, Y.; El Korchi, T.; Reinhold, L. UAS-Based Crack Detection Using Stereo Cameras: A Comparative Study. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1031–1035. [Google Scholar]
- Kim, K.; Hyun, J.; Choi, D.; Myung, H. Vertical thrusting unmanned surface vehicle for stable and close inspection of bridge structure. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1040–1042. [Google Scholar] [CrossRef]









| Ref. | Year | Scope of Study | No. of Studies Reviewed | Period of Study |
|---|---|---|---|---|
| [18] | 2015 | UAV-based visual bridge inspection | 33 | 1991–2014 |
| [19] | 2017 | Classification, manufacturing, design, and application of UAVs | 408 | 1952–2017 |
| [13] | 2018 | Structural health monitoring using smartphones, UAVs, cameras, and robotic sensors | 141 | 2007–2018 |
| [14] | 2018 | Civilian and civil engineering applications of UAVs | 169 | 1991–2018 |
| [15] | 2018 | UAV based thermal imaging practices and its application in building inspection | 92 | 2003–2017 |
| [16] | 2018 | Construction applications | 54 | 2008–2018 |
| [20] | 2019 | Automated visual inspection technologies such as drones following the PRISMA guidelines | 53 | 2000–2018 |
| [12] | 2019 | Civil infrastructure application | 135 | N/A |
| [17] | 2020 | Image processing algorithms for UAV-based bridge inspection and damage quantification techniques | N/A | N/A |
| [21] | 2020 | Autonomous robotic platforms for non-destructive testing and bridge monitoring | 242 | 2007–2020 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feroz, S.; Abu Dabous, S. UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sens. 2021, 13, 1809. https://doi.org/10.3390/rs13091809
Feroz S, Abu Dabous S. UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sensing. 2021; 13(9):1809. https://doi.org/10.3390/rs13091809
Chicago/Turabian StyleFeroz, Sainab, and Saleh Abu Dabous. 2021. "UAV-Based Remote Sensing Applications for Bridge Condition Assessment" Remote Sensing 13, no. 9: 1809. https://doi.org/10.3390/rs13091809
APA StyleFeroz, S., & Abu Dabous, S. (2021). UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sensing, 13(9), 1809. https://doi.org/10.3390/rs13091809