
Fusing Precipitable Water Vapor Data in CHINA at Different Timescales Using an Artificial Neural Network




Abstract
1. Introduction
2. Research Area and PWV Data
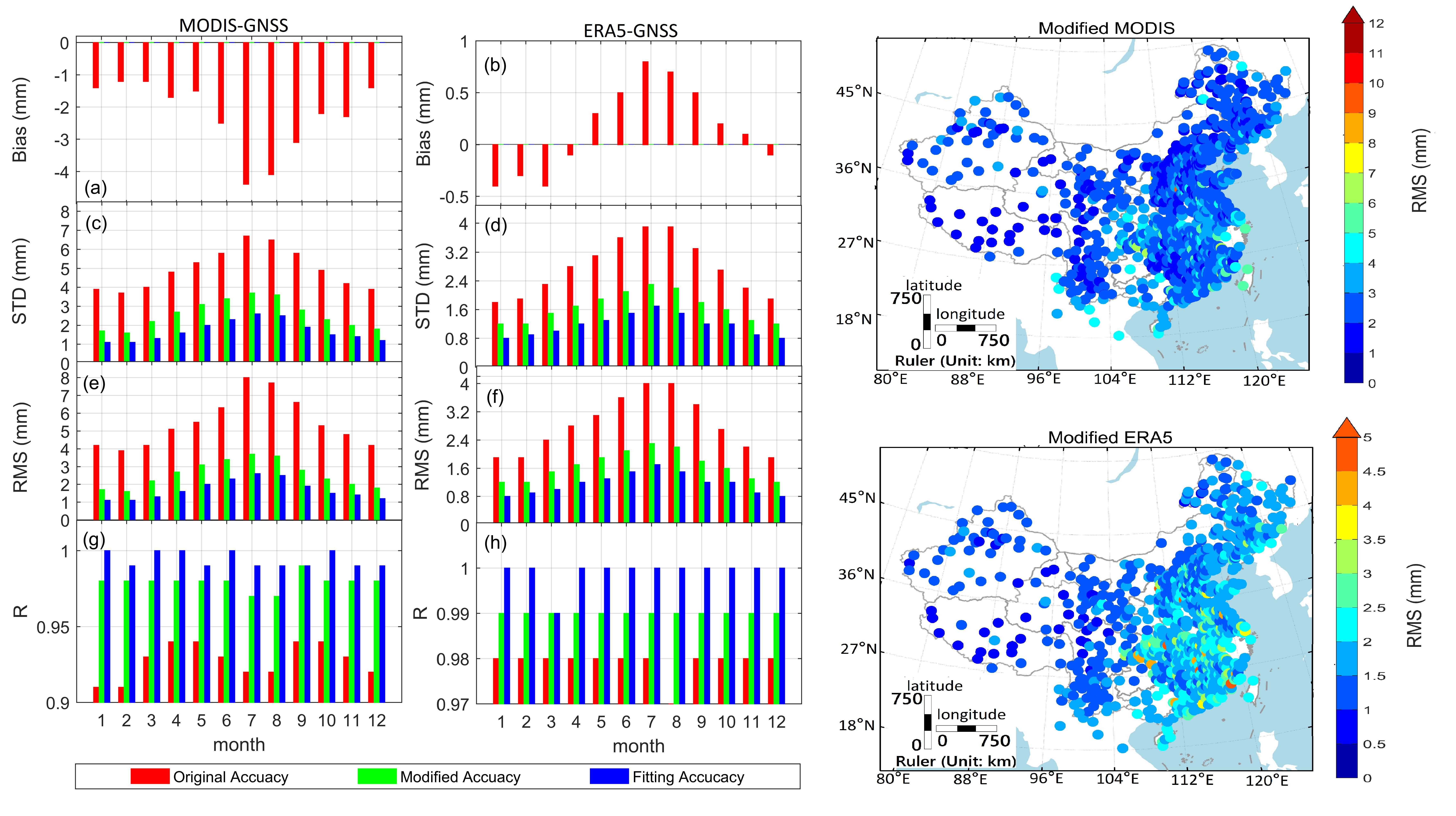
2.1. Research Area
2.2. Multi-Source PWV
2.2.1. GNSS PWV
2.2.2. ERA5 PWV
2.2.3. MODIS PWV
3. GRNN Method for PWV Fusion
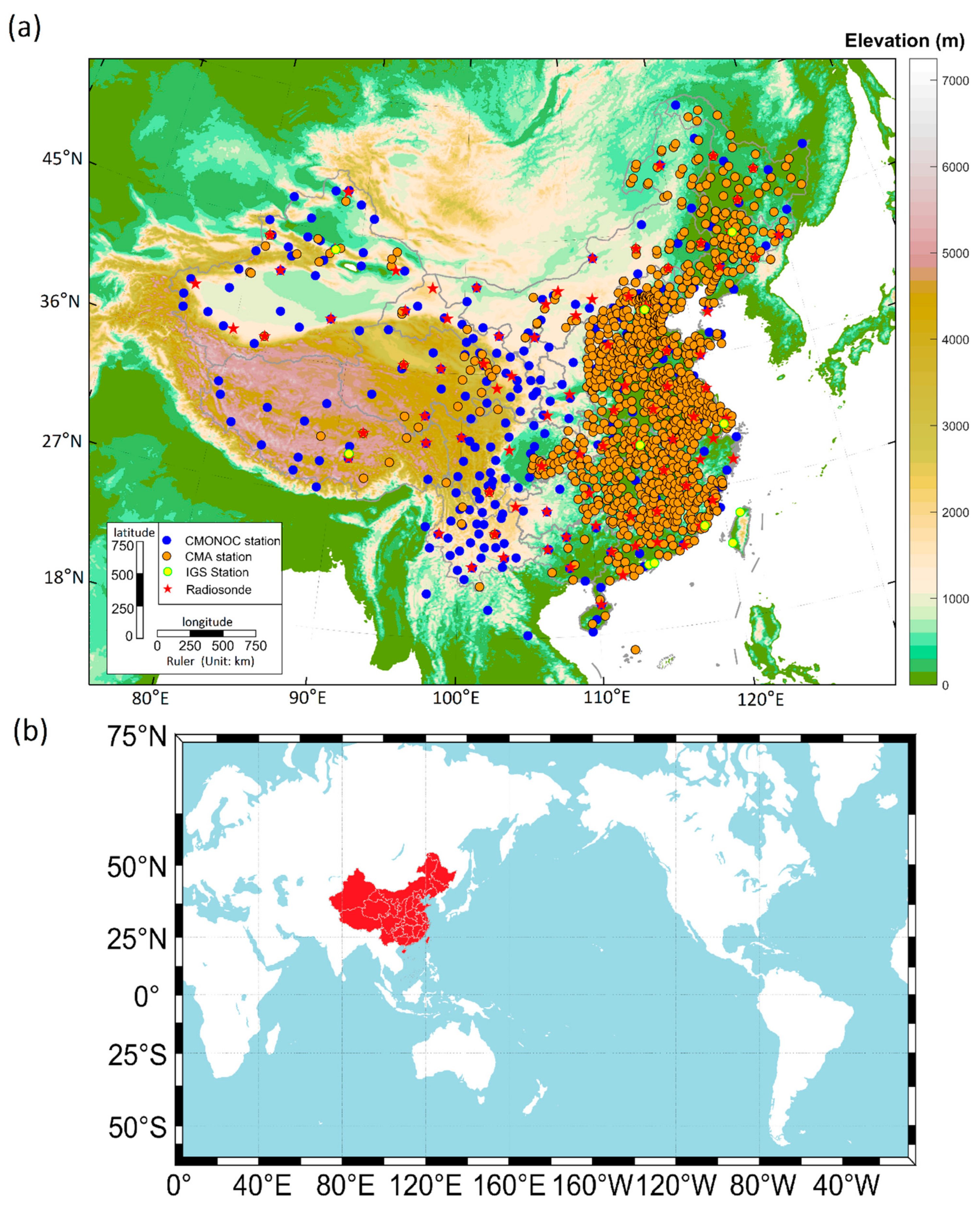
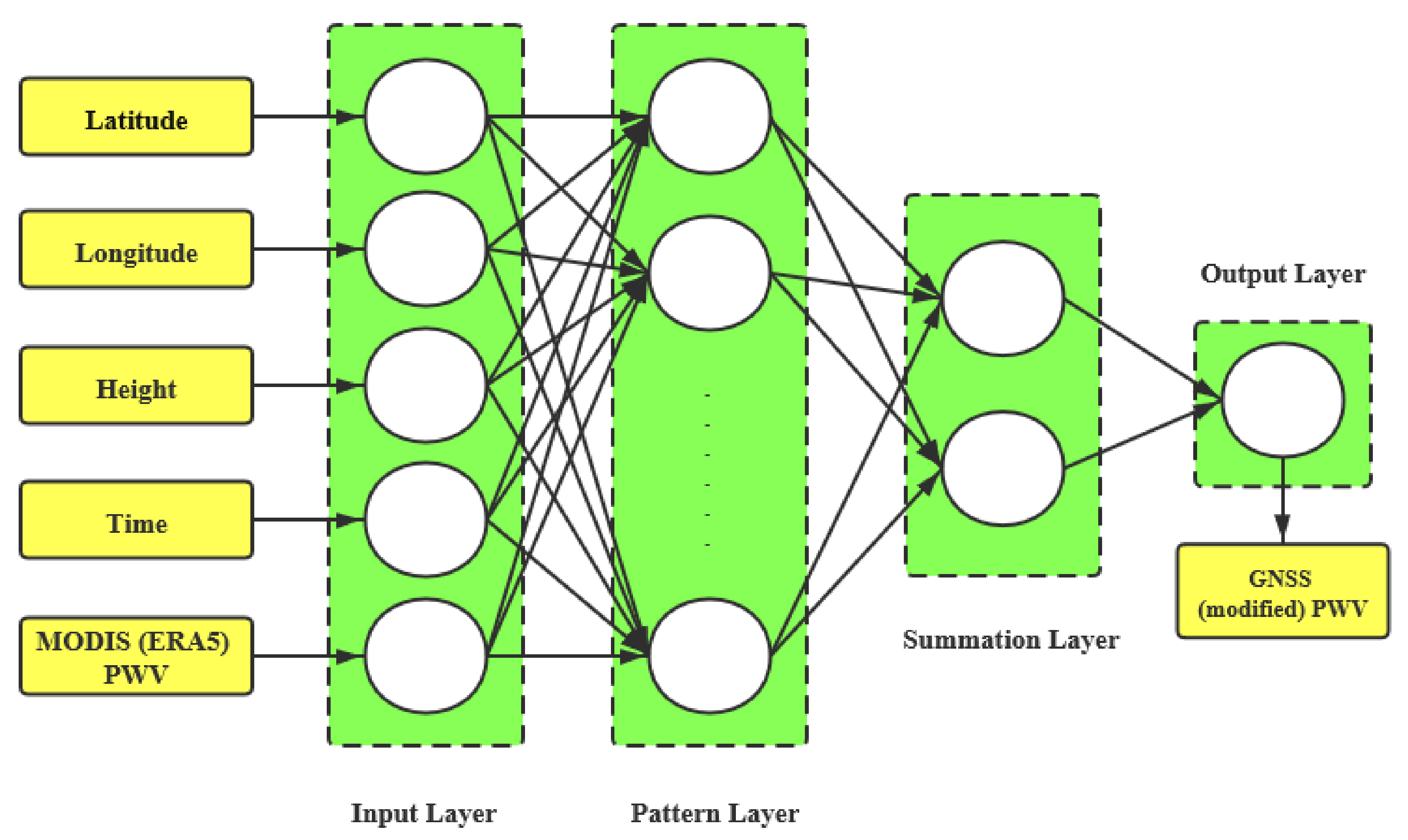
3.1. Generalized Regression Neural Network
3.2. Model Structure
3.3. PWV Data Matching
3.4. Constructing the GRNN Models
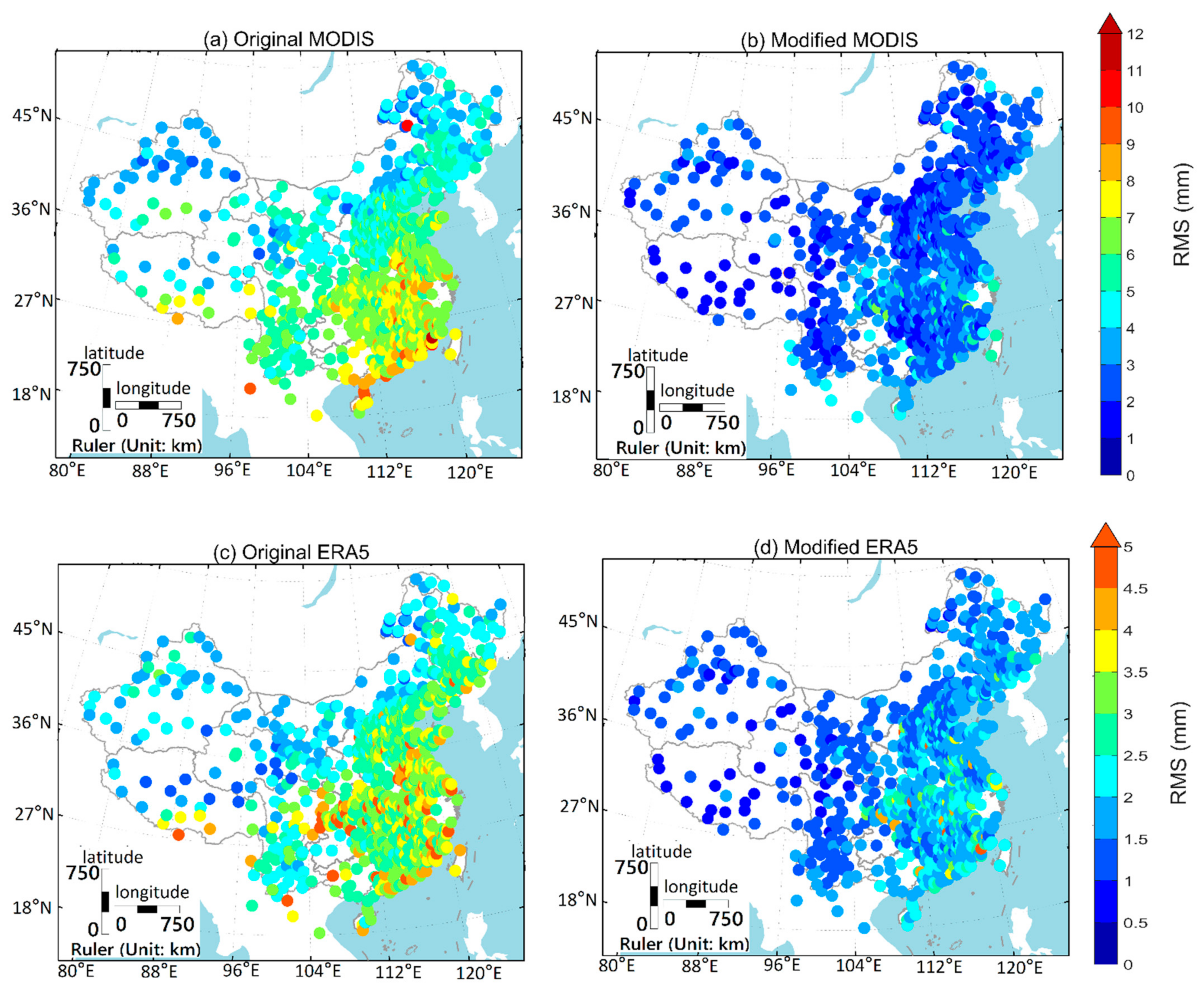
4. Results
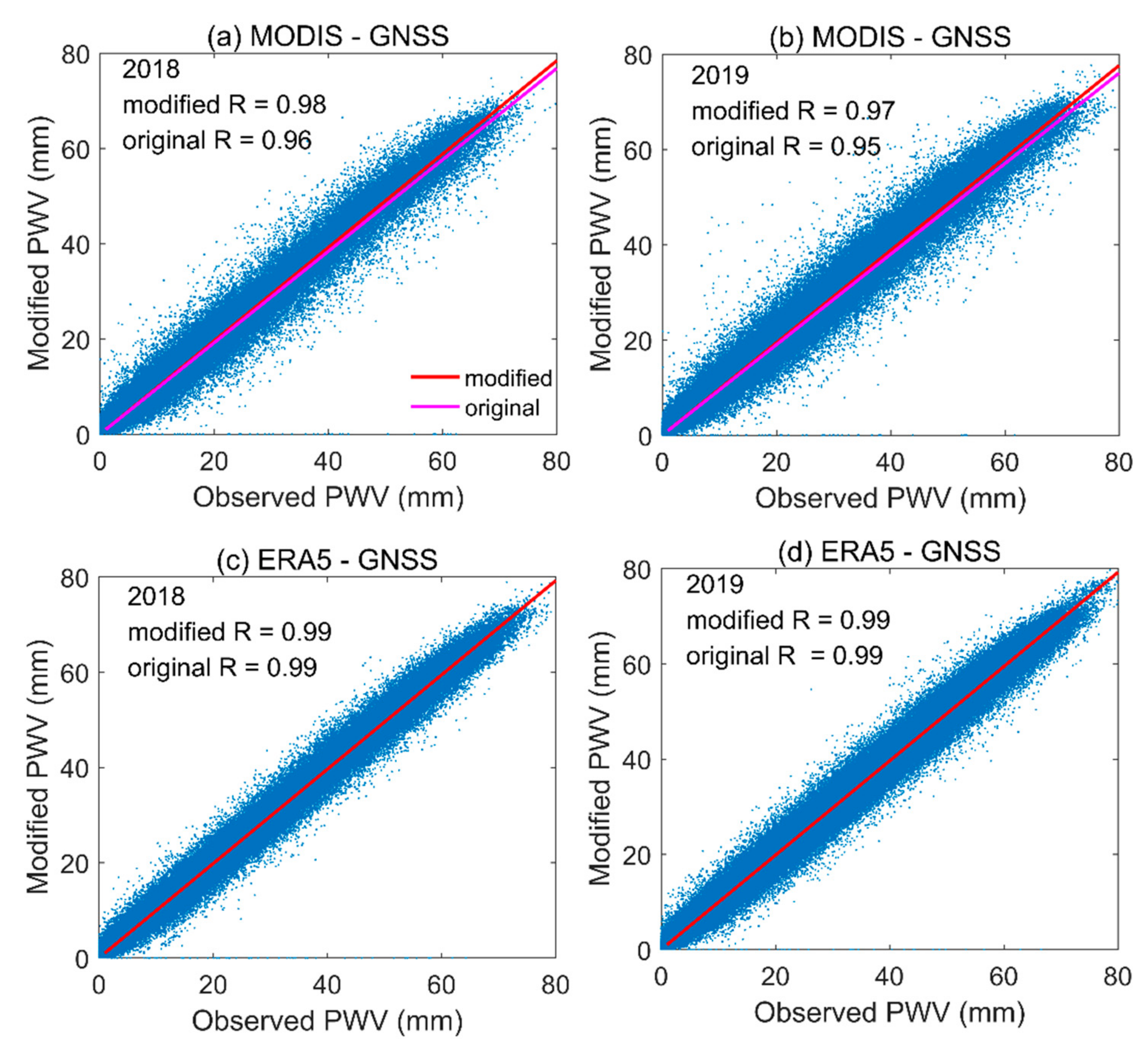
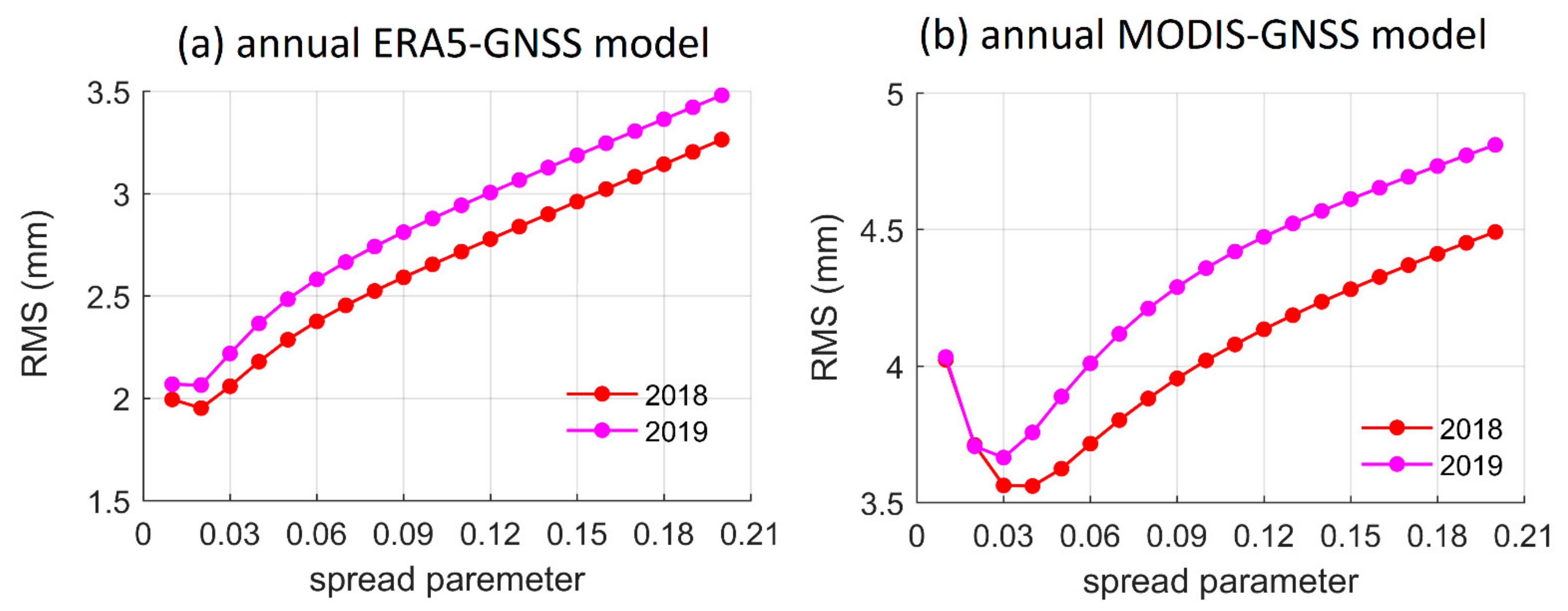
4.1. Model Performance at Annual Timescale
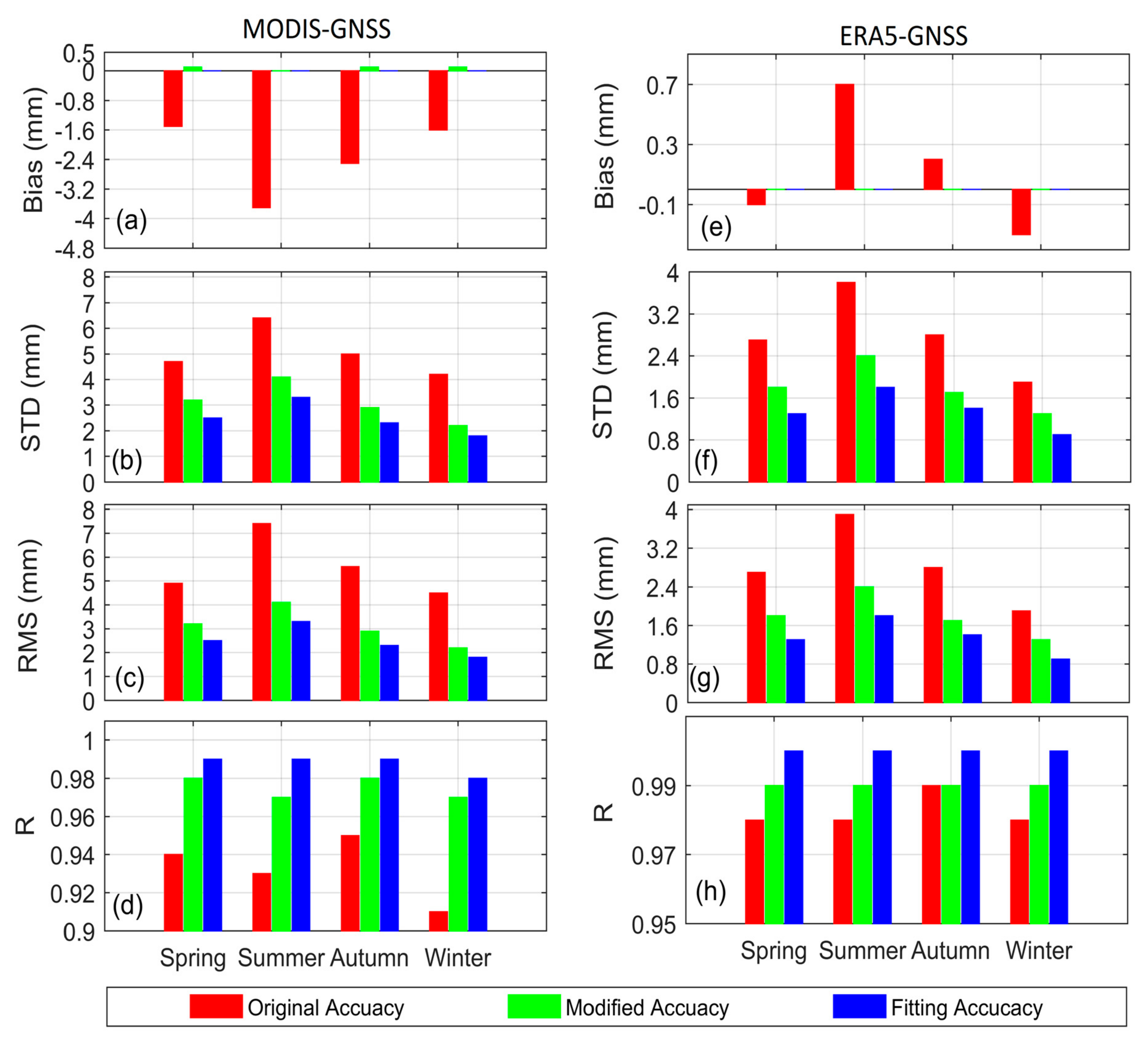
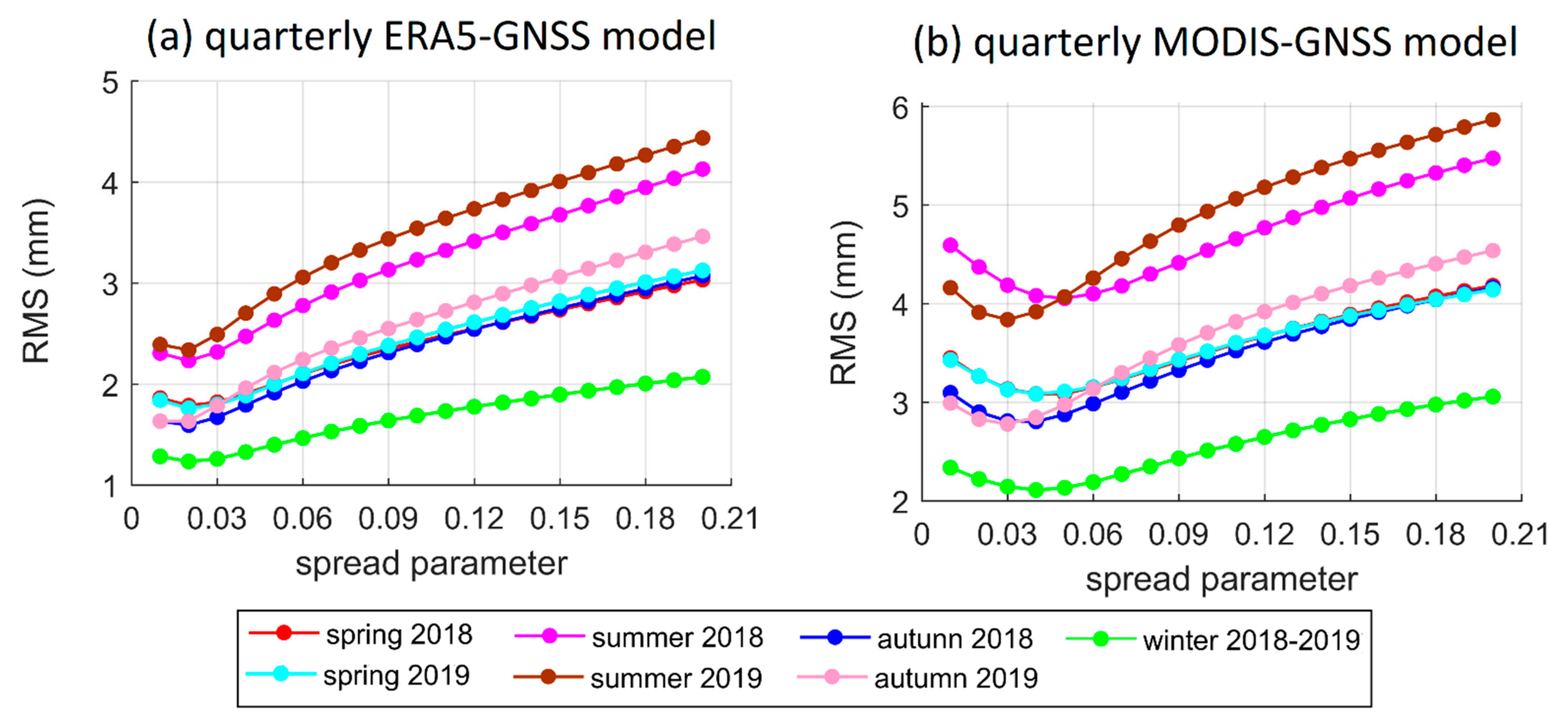
4.2. Model Performance at Quarterly Timescale
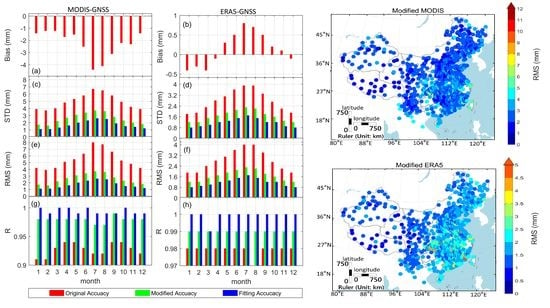
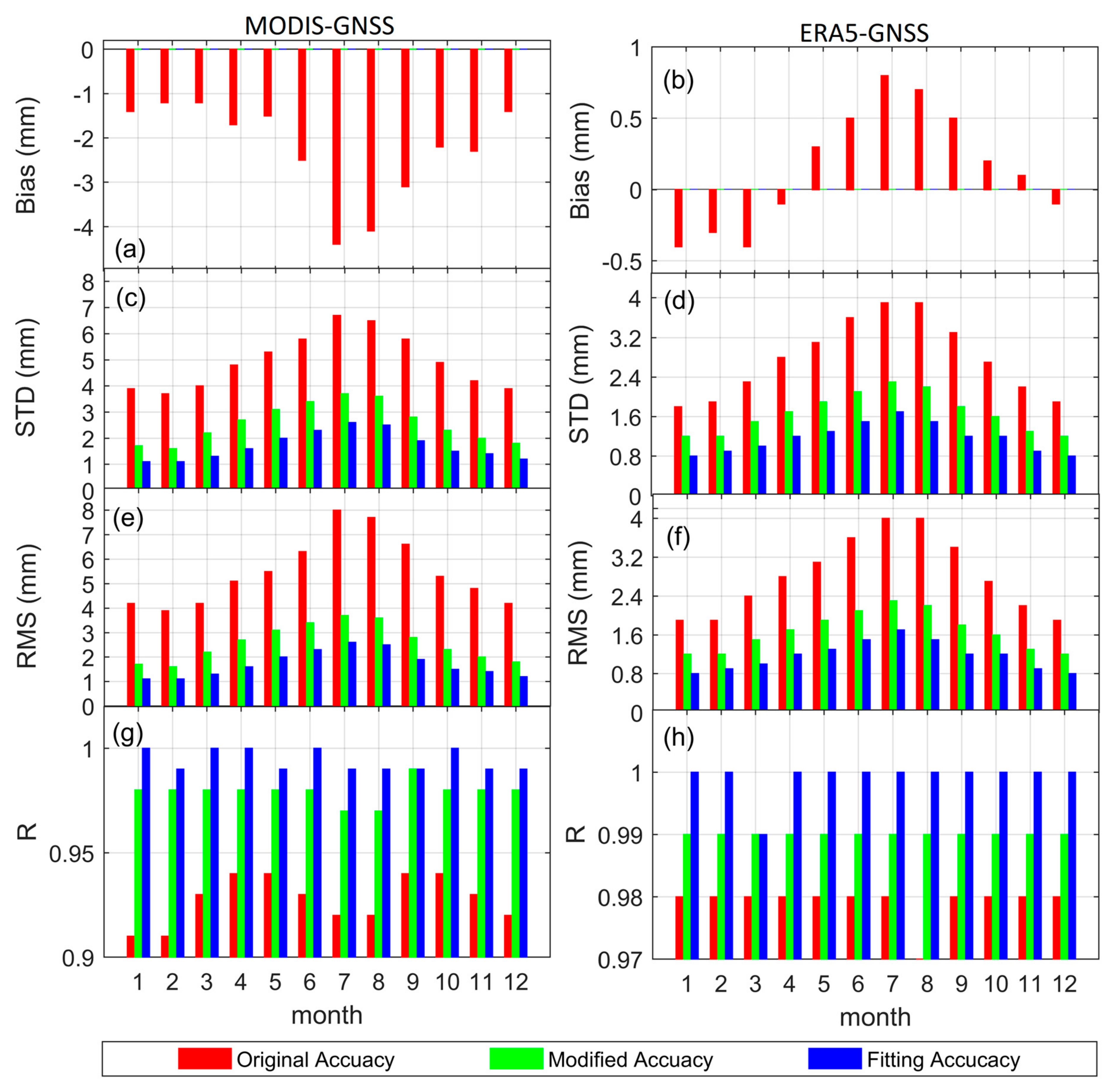
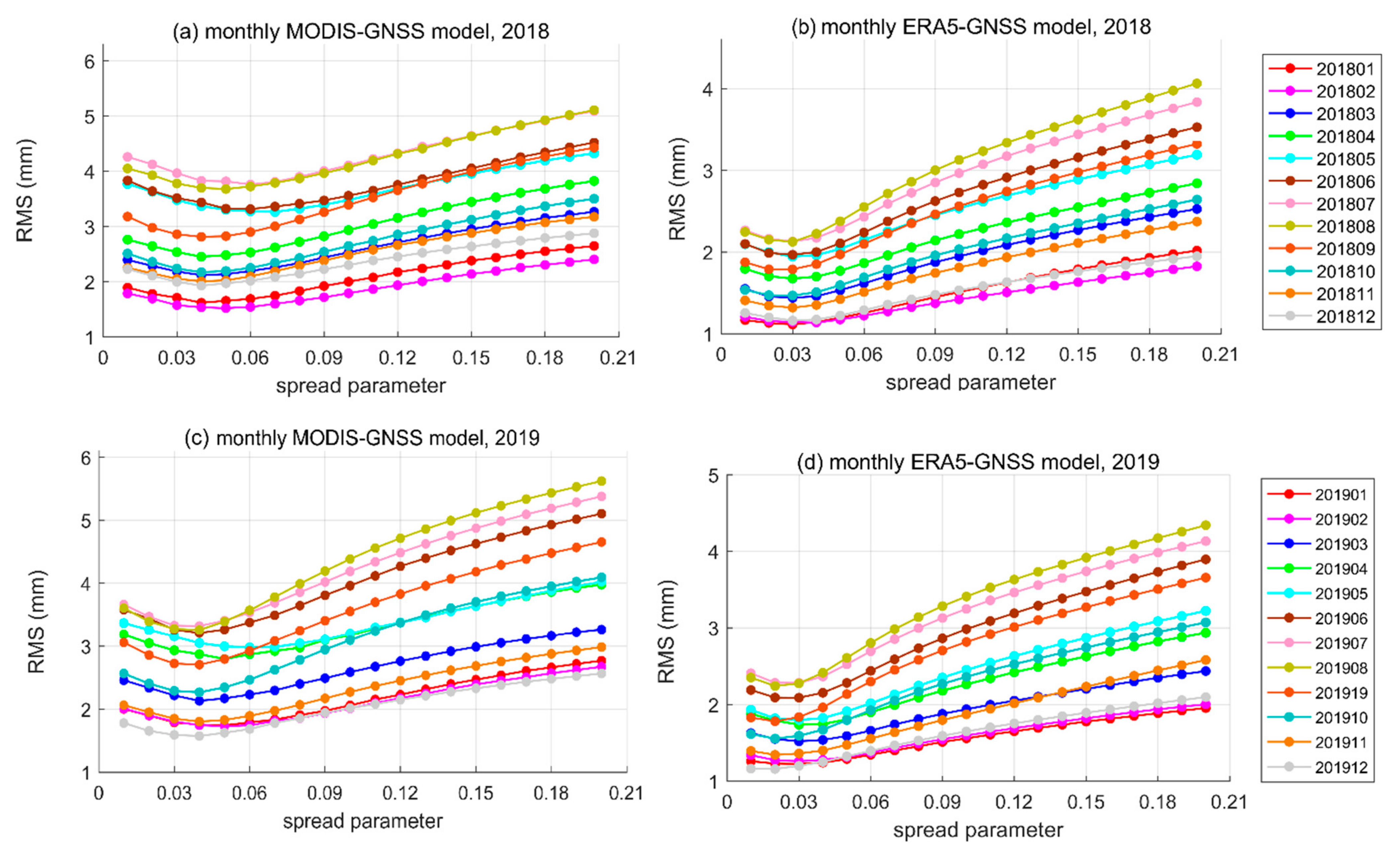
4.3. Model Performance at Monthly Timescale
4.4. Generating PWV Products in the Research Area
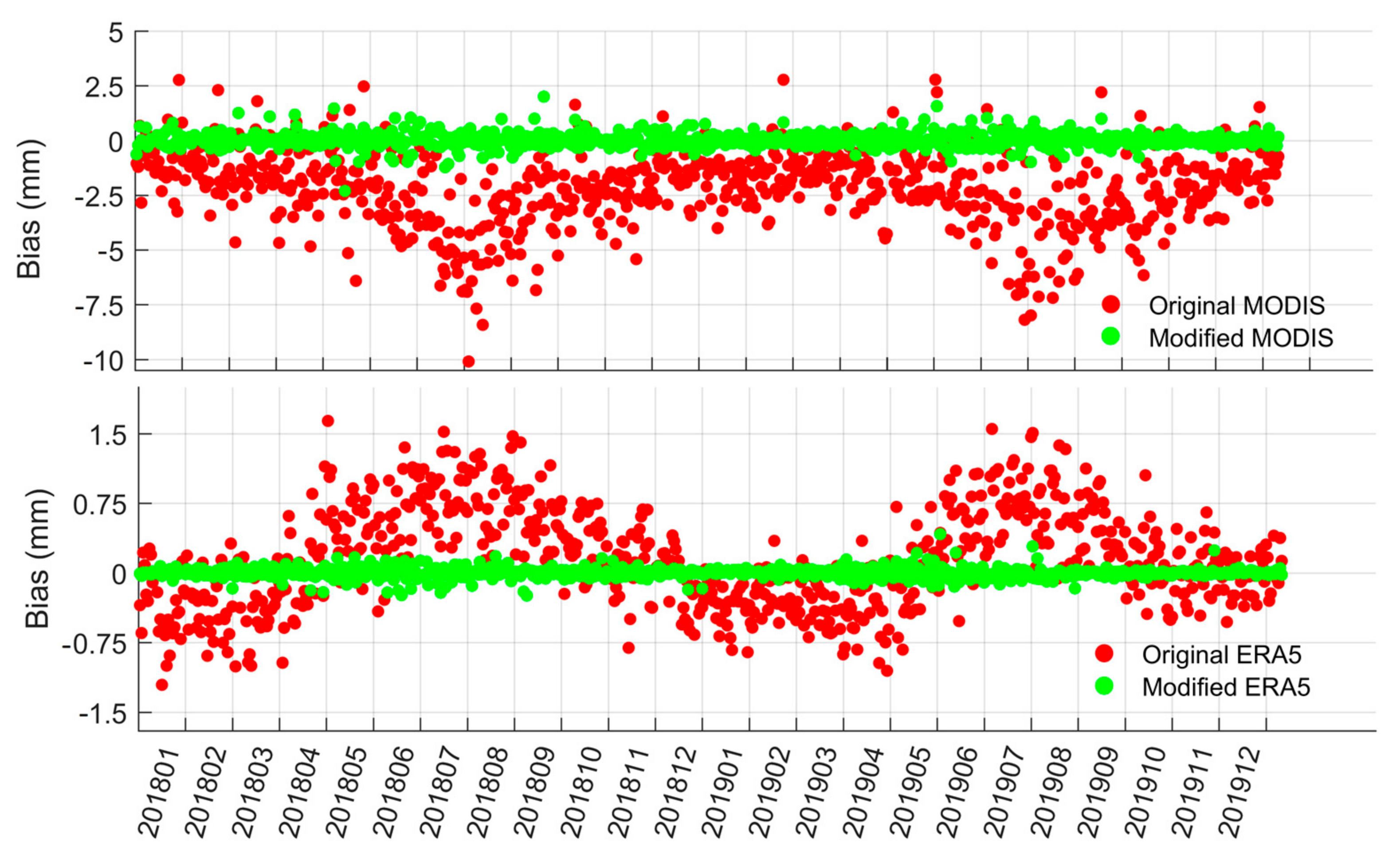
5. Accuracy Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviations | Full Name |
| CMA | China Meteorological Administration |
| CMONOC | Crustal Movement Observation Network of China |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| ERA5 | ECMWF ReAnalyses 5 |
| GNSS | Global Navigation Satellite System |
| GRNN | Generalized Regression Neural Network |
| IGS | International GNSS Service |
| InSAR | Interferometric Synthetic Aperture Radar |
| MODIS | Moderate-resolution Imaging Spectroradiometer |
| PPP | Precise Point Positioning |
| PWV | precipitable water vapor |
| R | correlation coefficient |
| RMS | Root Mean Square |
| STD | STandard Deviation |
| ZHD | Zenith Hydrostatic delay |
| ZTD | Zenith Total Delay |
| ZWD | Zenith Wet Delay |
Appendix A. Radiosonde PWV Calculation Method
Appendix B. The Model Performance against Spread Parameter Values




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Annual Models | |||||
|---|---|---|---|---|---|
| year | MODIS-GNSS | ERA5-GNSS | year | MODIS-GNSS | ERA5-GNSS |
| 2018 | 0.05 | 0.02 | 2019 | 0.05 | 0.02 |
| Quarterly models | |||||
| season | MODIS-GNSS | ERA5-GNSS | season | MODIS-GNSS | ERA5-GNSS |
| spring 201803–201805 | 0.06 | 0.03 | spring 201903–201905 | 0.06 | 0.03 |
| summer 201806–201808 | 0.07 | 0.03 | summer 201906–201908 | 0.05 | 0.03 |
| autumn 201809–201811 | 0.05 | 0.03 | autumn 201909–201911 | 0.05 | 0.03 |
| winter 201812–201902 | 0.06 | 0.03 | |||
| Monthly models | |||||
| month | MODIS-GNSS | ERA5-GNSS | month | MODIS-GNSS | ERA5-GNSS |
| 201801 | 0.06 | 0.03 | 201901 | 0.05 | 0.03 |
| 201802 | 0.06 | 0.04 | 201902 | 0.06 | 0.04 |
| 201803 | 0.05 | 0.04 | 201903 | 0.05 | 0.04 |
| 201804 | 0.05 | 0.04 | 201904 | 0.06 | 0.04 |
| 201805 | 0.07 | 0.04 | 201905 | 0.07 | 0.04 |
| 201806 | 0.07 | 0.04 | 201906 | 0.06 | 0.04 |
| 201807 | 0.07 | 0.04 | 201907 | 0.06 | 0.04 |
| 201808 | 0.06 | 0.03 | 201908 | 0.06 | 0.03 |
| 201809 | 0.06 | 0.03 | 201909 | 0.05 | 0.03 |
| 201810 | 0.05 | 0.04 | 201910 | 0.05 | 0.03 |
| 201811 | 0.06 | 0.04 | 201911 | 0.05 | 0.02 |
| 201812 | 0.06 | 0.03 | 201912 | 0.05 | 0.03 |
References
- Huang, Q.; Zhang, Q.; Singh, V.P.; Shi, P.; Zheng, Y. Variations of dryness/wetness across China: Changing properties, drought risks, and causes. Glob. Planet. Chang. 2017, 155, 1–12. [Google Scholar] [CrossRef]
- Wang, P.; Wu, X.; Hao, Y.; Wu, C.; Zhang, J. Is Southwest China drying or wetting? Spatiotemporal patterns and potential causes. Theor. Appl. Climatol. 2020, 139, 1–15. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.P.; Cross, P.; Fielding, E.J. Interferometric synthetic aperture radar (InSAR) atmospheric correction: GPS, Moderate Resolution Imaging Spectroradiometer (MODIS), and InSAR integration. J. Geophys Res. Solid Earth. 2005, 110. [Google Scholar] [CrossRef]
- Ningombam, S.S.; Jade, S.; Shrungeshwara, T.S.; Song, H.J. Validation of water vapor retrieval from Moderate Resolution Imaging Spectro-radiometer (MODIS) in near infrared channels using GPS data over IAO-Hanle, in the trans-Himalayan region. J. Atmos. Sol. Terr. Phys. 2016, 137, 76–85. [Google Scholar] [CrossRef]
- Khaniani, A.S.; Nikraftar, Z.; Zakeri, S. Evaluation of MODIS Near-IR water vapor product over Iran using ground-based GPS measurements. Atmos. Res. 2020, 231, 104657. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the Global Positioning System. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Yao, Y.; Shan, L.; Zhao, Q. Establishing a method of short-term rainfall forecasting based on GNSS-derived PWV and its application. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef]
- Bock, O.; Nuret, M. Verification of NWP model analyses and radiosonde humidity data with GPS precipitable water vapor estimates during AMMA. Weather Forecast. 2009, 24, 1085–1101. [Google Scholar] [CrossRef]
- Zhang, Q.; Ye, J.; Zhang, S.; Han, F. Precipitable water vapor retrieval and analysis by multiple data sources: Ground-based GNSS, radio occultation, radiosonde, microwave satellite, and NWP reanalysis data. J. Sens. 2018, 2018, 3428303. [Google Scholar] [CrossRef]
- Xiong, Z.; Sang, J.; Sun, X.; Zhang, B.; Li, J. Comparisons of Performance Using Data Assimilation and Data Fusion Approaches in Acquiring Precipitable Water Vapor: A Case Study of a Western United States of America Area. Water 2020, 12, 2943. [Google Scholar] [CrossRef]
- Liu, H.; Tang, S.; Zhang, S.; Hu, J. Evaluation of MODIS water vapour products over China using radiosonde data. Int. J. Remote Sens. 2015, 36, 680–690. [Google Scholar] [CrossRef]
- Gui, K.; Che, H.; Chen, Q.; Zeng, Z.; Liu, H.; Wang, Y.; Zheng, Y.; Sun, T.; Liao, T.; Wang, H.; et al. Evaluation of radiosonde, MODIS-NIR-Clear, and AERONET precipitable water vapor using IGS ground-based GPS measurements over China. Atmos. Res. 2017, 197, 461–473. [Google Scholar] [CrossRef]
- Li, Z. Production of Regional 1 km × 1 km Water Vapor Fields through the Integration of GPS and MODIS Data. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 2396–2403. [Google Scholar]
- Zhang, B.; Yao, Y.; Xin, L.; Xu, X. Precipitable water vapor fusion: An approach based on spherical cap harmonic analysis and Helmert variance component estimation. J. Geod. 2019, 93, 2605–2620. [Google Scholar] [CrossRef]
- Rocken, C.; Ware, R.; Van Hove, T.; Solheim, F.; Alber, C.; Johnson, J.; Bevis, M.; Businger, S. Sensing atmospheric water vapor with the Global Positioning System. Geophys. Res. Lett. 1993, 20, 2631–2634. [Google Scholar] [CrossRef]
- Tregoning, P.; Boers, R.; O’Brien, D.; Hendy, M. Accuracy of absolute precipitable water vapor estimates from GPS observations. J. Geophys. Res. Atmos. 1998, 103, 28701–28710. [Google Scholar] [CrossRef]
- Zhao, Q.; Du, Z.; Yao, W.; Yao, Y. Hybrid precipitable water vapor fusion model in China. J. Atmos. Sol. Terr. Phys. 2020, 208, 105387. [Google Scholar] [CrossRef]
- Lindenbergh, R.; Van der Marel, H.; Keshin, M.; De Haan, S. Validating time series of a combined GPS and MERIS Integrated Water Vapor product. In Proceedings of the 2nd MERIS/(A) ATSR User Workshop, Frascati, Italy, 22–26 September 2008; ESA/ESRIN: Frascati, Italy, 2009. NB: Small correction applied wrt Proceedings version. [Google Scholar]
- Alshawaf, F.; Hinz, S.; Mayer, M.; Meyer, F.J. Constructing accurate maps of atmospheric water vapor by combining interferometric synthetic aperture radar and GNSS observations. J. Geophys. Res. Atmos. 2015, 120, 1391–1403. [Google Scholar] [CrossRef]
- Alshawaf, F.; Fersch, B.; Hinz, S.; Kunstmann, H.; Mayer, M.; Meyer, F.J. Water vapor mapping by fusing InSAR and GNSS remote sensing data and atmospheric simulations. Hydrol. Earth Syst. Sci. 2015, 19, 4747–4764. [Google Scholar] [CrossRef]
- Li, X.; Long, D. An improvement in accuracy and spatiotemporal continuity of the MODIS precipitable water vapor product based on a data fusion approach. Remote Sens. Environ. 2020, 248, 111966. [Google Scholar] [CrossRef]
- Bai, J.; Lou, Y.; Zhang, W.; Zhou, Y.; Zhang, Z.; Shi, C. Assessment and calibration of MODIS precipitable water vapor products based on GPS network over China. Atmos. Res. 2021, 254, 105504. [Google Scholar] [CrossRef]
- Zhang, B.; Yao, Y. Precipitable water vapor fusion based on a generalized regression neural network. J. Geod. 2021, 95, 1–14. [Google Scholar] [CrossRef]
- Liang, H.; Cao, Y.; Wan, X.; Xu, Z.; Wang, H.; Hu, H. Meteorological applications of precipitable water vapor measurements retrieved by the national GNSS network of China. Geod. Geodyn. 2015, 6, 135–142. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Xu, C.; Peng, W.; Wan, Y. Establishment of a real-time local tropospheric fusion model. Remote Sens. 2019, 11, 1321. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Dach, R.; Schaer, S.; Arnold, D.; Kalarus, S.; Prange, L.; Stebler, P.; Villiger, A.; Jäggi, A. CODE Final Product Series for the IGS; Astronomical Institute, University of Bern: Bern, Switzerland, 2020. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Geophys. Monogr. Ser. 1972, 15, 247–251. [Google Scholar]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Reuter, H.I.; Nelson, A.; Jarvis, A. An evaluation of void-filling interpolation methods for SRTM data. Int. J. Geogr. Inf. Sci. 2007, 21, 983–1008. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled Seamless SRTM Data V4, International Centre for Tropical Agriculture (CIAT). 2008. Available online: http://srtm.csi.cgiar.org (accessed on 20 April 2020).
- Prasad, A.K.; Singh, R.P. Validation of MODIS Terra, AIRS, NCEP/DOE AMIP-II Reanalysis-2, and AERONET Sun photometer derived integrated precipitable water vapor using ground-based GPS receivers over India. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Roman, J.; Knuteson, R.; August, T.; Hultberg, T.; Ackerman, S.; Revercomb, H. A global assessment of NASA AIRS v6 and EUMETSAT IASI v6 precipitable water vapor using ground-based GPS SuomiNet stations. J. Geophys. Res. Atmos. 2016, 121, 8925–8948. [Google Scholar] [CrossRef]
- Li, J.; Zhang, B.; Yao, Y.; Liu, L.; Sun, Z.; Yan, X. A Refined Regional Model for Estimating Pressure, Temperature, and Water Vapor Pressure for Geodetic Applications in China. Remote Sens. 2020, 12, 1713. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed]
- Polat, K.; Güneş, S. Classification of epileptiform EEG using a hybrid system based on decision tree classifier and fast Fourier transform. Appl. Math. Comput. 2007, 187, 1017–1026. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, S.; Guo, L.; Zhao, Y.; Shao, F.; Chen, F. Comparisons of isomiR patterns and classification performance using the rank-based MANOVA and 10-fold cross-validation. Gene 2015, 569, 21–26. [Google Scholar] [CrossRef]
- Tandon, S.; Tripathi, S.; Saraswat, P.; Dabas, C. Bitcoin Price Forecasting using LSTM and 10-Fold Cross validation. In Proceedings of the 2019 International Conference on Signal Processing and Communication (ICSC), Noida, India, 7–9 March 2019; pp. 323–328. [Google Scholar]
- Wexler, A. Vapor pressure formulation for water in range 0 to 100 °C. A revision. J. Res. Natl. Bur. Stand. A 1976, 80, 775–785. [Google Scholar] [CrossRef]
- Wexler, A. Vapor pressure formulation for ice. J. Res. Natl. Bur. Stand. A 1977, 81, 5–20. [Google Scholar] [CrossRef]











| Unit: mm | Bias | STD | RMS | R |
|---|---|---|---|---|
| MODIS-GNSS | −2.3 | 5.2 | 5.7 | 0.96 |
| ERA5-GNSS | 0.2 | 3.0 | 3.0 | 0.99 |
| Unit: mm | Bias | STD | RMS | R | |
|---|---|---|---|---|---|
| MODIS-GNSS | Modified | 0.1 | 3.8 | 3.8 | 0.98 |
| Fitting | 0.0 | 3.4 | 3.4 | 0.98 | |
| ERA5-GNSS | Modified | 0.0 | 2.0 | 2.0 | 0.99 |
| Fitting | 0.0 | 1.5 | 1.5 | 1.00 |
| Unit: mm | Accuracy | Bias | STD | RMS | R |
|---|---|---|---|---|---|
| MODIS-GNSS | Modified | 0.1 | 3.2 | 3.2 | 0.98 |
| Fitting | 0.0 | 2.6 | 2.6 | 0.99 | |
| ERA5-GNSS | Modified | 0.0 | 1.9 | 1.9 | 0.99 |
| Fitting | 0.0 | 1.4 | 1.4 | 1.00 |
| Unit: mm | Accuracy | Bias | STD | RMS | R |
|---|---|---|---|---|---|
| MODIS-GNSS | Modified | 0.0 | 2.6 | 2.6 | 0.98 |
| Fitting | 0.0 | 1.7 | 1.7 | 0.99 | |
| ERA5-GNSS | Modified | 0.0 | 1.7 | 1.7 | 0.99 |
| Fitting | 0.0 | 1.2 | 1.2 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Z.; Zhang, B.; Sang, J.; Sun, X.; Wei, X. Fusing Precipitable Water Vapor Data in CHINA at Different Timescales Using an Artificial Neural Network. Remote Sens. 2021, 13, 1720. https://doi.org/10.3390/rs13091720
Xiong Z, Zhang B, Sang J, Sun X, Wei X. Fusing Precipitable Water Vapor Data in CHINA at Different Timescales Using an Artificial Neural Network. Remote Sensing. 2021; 13(9):1720. https://doi.org/10.3390/rs13091720
Chicago/Turabian StyleXiong, Zhaohui, Bao Zhang, Jizhang Sang, Xiaogong Sun, and Xiaoming Wei. 2021. "Fusing Precipitable Water Vapor Data in CHINA at Different Timescales Using an Artificial Neural Network" Remote Sensing 13, no. 9: 1720. https://doi.org/10.3390/rs13091720
APA StyleXiong, Z., Zhang, B., Sang, J., Sun, X., & Wei, X. (2021). Fusing Precipitable Water Vapor Data in CHINA at Different Timescales Using an Artificial Neural Network. Remote Sensing, 13(9), 1720. https://doi.org/10.3390/rs13091720