1. Introduction
The sea is often described as the world’s largest museum and with an estimated three million shipwrecks resting in its depths, this may very much be the case [
1]. These time capsules are a microcosm of society, reflecting the goods, people, and ideas that have been carried by ships for millennia [
2]. Only a fraction of this vast archaeological repertoire has been discovered and documented. Sites that have been explored provide priceless information on the human story.
Underwater cultural heritage (UCH) is defined by the 2001 UNESCO Convention on the Protection of the Underwater Cultural Heritage as “all traces of human existence having a cultural, historical or archaeological character which have been partially or totally underwater, periodically or continuously, for at least 100 years” [
3] (Article 1.a). These traces of human existence can take the form of shipwrecks and their cargoes, aircraft wrecks, submerged prehistoric cultural landscapes, submerged ports, and harbor structures. The human story is inextricably linked to the waterways of the world, yet the very nature of these sites as being beneath the surface has challenged both investigation and appreciation [
4]. On the one hand, it has protected UCH sites from human overexploitation through illicit looting and destruction, and on the other hand, has created an out of sight out of mind attitude amongst the general public. The development of the Self-Contained Underwater Breathing Apparatus (SCUBA) in the 1940s by Jacques-Yves Cousteau and Emil Gagnan brought the seabed within human reach. In subsequent years, the discovery and subsequent excavation of sites such as the Cape Gelidonya and Uluburun wrecks demonstrated that scientific excavation and documentation underwater were possible [
5]. The following decades were witness to a verifiable explosion of underwater exploration, excavation, and exploitation. It is estimated that since the 1950s hundreds of major shipwrecks and countless other sites have been looted and damaged [
6].
The international framework established by the 2001 UNESCO Convention sought to address the vulnerability of UCH, providing a legal regime and ensuring its preservation. A defining feature of the Convention is the balance between protection and access. A connection between effective protection, preservation, and public awareness is laid out in Article 2.10:
“Responsible non-intrusive access to observe or document in-situ underwater cultural heritage shall be encouraged to create public awareness, appreciation, and protection of the heritage except where such access is incompatible with its protection and management” [
3] (Article 2.10).
The establishment of this connection has multiple facets. Public access can refer to the diving and non-diving public. Responsible non-intrusive diver access to underwater sites is considered to be best practice in UCH management, primarily since observing and exploring a site with a strict “look and no-touch” approach is unlikely to cause damage. It can, however, increase awareness and appreciation. This is particularly valid for those sites located above the 30 m contour line, often viewed as the recreational diving limit. The development of technical diving has pushed this depth limit, with deep-water sites (below the 50 m contour line) now also accessible to divers. The specialized training necessary for such deep diving has ensured that only a minority of the diving public is able to access to these sites. This raises the question as to how the non-diving public is to access a cultural resource where the primary method of protection is its location on the seabed and hence its inaccessibility to the majority of people [
6]. Virtual access can bridge this gap whilst contributing to improved and continued protection. Raising awareness amongst the non-diving public through the provision of virtual access can lead to an increasing appreciation of UCH sites, thus, elevating the recognition and appreciation of submerged sites to the same level as terrestrial cultural heritage.
Malta and the Development of Underwater Cultural Heritage Management
The trajectory of underwater developments in Malta closely followed that of the rest of the world, with recreational diving activities becoming increasingly popular throughout the 1960s and 1970s. This is also applicable to the rise of underwater archaeological investigations. The first officially documented underwater discovery was in 1959, where reports of a possible unexploded ordinance resulted in the discovery of a Greco-Roman amphora [
7]. This fortuitous discovery was followed by several underwater projects, such as the various expeditions to Xlendi Bay, Gozo during the early 1960s, and Honor Frost’s documentation and excavation of the so-called Mortar Wreck in Mellieħa Bay in 1967 [
7]. Increased interest in recreational diving activities led to a rising number of diving schools and clubs throughout the 1960s and 1970s, resulting in an “uncontrolled recovery of archaeological items” [
8] (p. 67). From 1975 onwards, dive schools were barred from operating at reserved localities, which included all those sites where archaeological remains had been reported or discovered. Diving activities only continued to increase exponentially over the next decades, resulting in the discovery and declaration of more reserved localities. Eventually, it was recognized that these declarations were unsustainable, primarily due to the lack of trained underwater heritage professionals and the unwillingness to close the majority of Malta’s diving locations. Attention shifted to raising awareness amongst the local recreational diving community [
9]. By the late 1990s, several foreign-led projects arrived in Malta, carrying out remote sensing operations as well as underwater excavations. One such project was led by the Institute of Nautical Archaeology (INA) in 1999–2000, and consisted of a combination of remote sensing and diver surveys, firmly establishing the use of remote sensing equipment in underwater archaeology in Malta [
10]. For the first time, local archaeologists were able to embrace the opportunity to train in the techniques and methodologies of underwater technology [
7].
The need for a controlled monitoring of underwater sites was already noted in the 1960s. It would be decades before this was actioned. Terrestrial heritage sites have benefitted from legal protection since the setting up of the Permanent Commission for the Inspection of Archaeological Monuments in 1881. This was followed by the 1910 Protection of Antiquities Ordinance, replaced in 1925 by the Antiquities Protection Act, which remained in place until 2002, and the introduction of the Cultural Heritage Act [
11]. Provisions explicitly directed at UCH were consistently missing features of these successive legislations. In 2019, Malta’s heritage legislation received a much-awaited amendment, which for the first time included any remains over 50 years old and found on the territorial seabed of Malta as part of the island’s UCH [
12]. The Underwater Cultural Heritage Unit (UCHU) within Heritage Malta, the national agency for cultural heritage, was set up in recognition of the responsibility towards the proper protection and management of access to the island’s UCH.
More than 7000 years of human occupation are reflected in and on the landscape of the Maltese Islands, and recent offshore surveys have sought to answer the question of whether this is also mirrored on the seabed surrounding the islands. It is undeniable that Malta’s long and complex history has left an indelible mark on the seabed, and the concentration of UCH is exceptional in both quantity and quality. A system of public access has been put in place that allows the diving public to visit these submerged heritage sites. This is in contrast to previous years, where unregulated and illicit access was the norm. This can be compared to the situation in Sicily, where, under the direction of Sebastiono Tusa, a system of access to a number of underwater archaeological parks and sites was implemented [
13]. Today, a ticketing system similar to land-based heritage sites is used to regulate access. Monitoring such access is not as straightforward as on land, and as such, monitoring initiatives revolve around regular site patrols, executed in collaboration with local stakeholders. Besides the challenges related to protection and management, these sites are also characterized by challenges concerning public sharing and communicating. The regular monitoring of sites is important since a potential pitfall of public outreach is an increased risk of exploitation—the more awareness on UCH, the higher the potential for illicit looting. Thus, a balance between public outreach and regular monitoring needs to be planned in order to ensure that the authenticity and integrity of Malta’s underwater sites are maintained. One of the defining features of the majority of Malta’s UCH sites is their location beyond the 50 m contour line. This very fact has contributed greatly to the in situ preservation of these sites, yet it has also facilitated a general lack of knowledge and awareness amongst the general public. Those sites that are located in shallower waters are well-known by the local dive community, but also remain mostly invisible to the non-diving public.
Rapidly evolving digital technologies have been integrated into underwater archaeological practices at a swift rate, owing to the challenges presented by elements such as depth, visibility, temperature, and currents [
5]. Originally used by the authors to record and document underwater sites, it was quickly realized that these digital assets also had value as a means to communicate UCH to those who are not able to visit the sites in situ. Today, heritage professionals have integrated providing virtual experiences into the management process, recognizing its high potential [
14]. Through a rising awareness of the capability of 3D photogrammetry to narrow the previously insurmountable gap between the non-diving public and the seabed, the idea for UnderwaterMalta, a virtual museum, was born. The main aim behind this was the creation of a single widely accessible space where members of the public can explore multiple UCH sites as 3D reconstructions or through virtual reality (VR). The versatility and success of tools such as 3D models and VR for cultural heritage purposes have already been demonstrated [
5,
15,
16,
17,
18,
19,
20,
21], establishing them as fundamental tools that “can be applied to the world of cultural heritage as a vessel for preservation, reconstruction, documentation, research and promotion” [
22] (p. 42).
The main aim of this article is to outline how the UCH of the Maltese Islands is being presented to the public through the use of traditional photography, video, 3D models, and VR. This approach makes previously invisible sites visible to all members of the public. A detailed description of the workflow is presented in
Section 2. The data capture process and processing methods are presented in
Section 3. These are set within the context of the particular and unique working conditions related to deep-water sites. The capturing and processing of raw data form the majority of the work behind UnderwaterMalta, yet the creation and launch of such a website are only the beginning. A virtual museum needs to be curated just as any other physical museum. The work behind this is examined in
Section 4. The sustainability of UnderwaterMalta is discussed in
Section 5. Concluding remarks are found in
Section 6.
2. Workflow
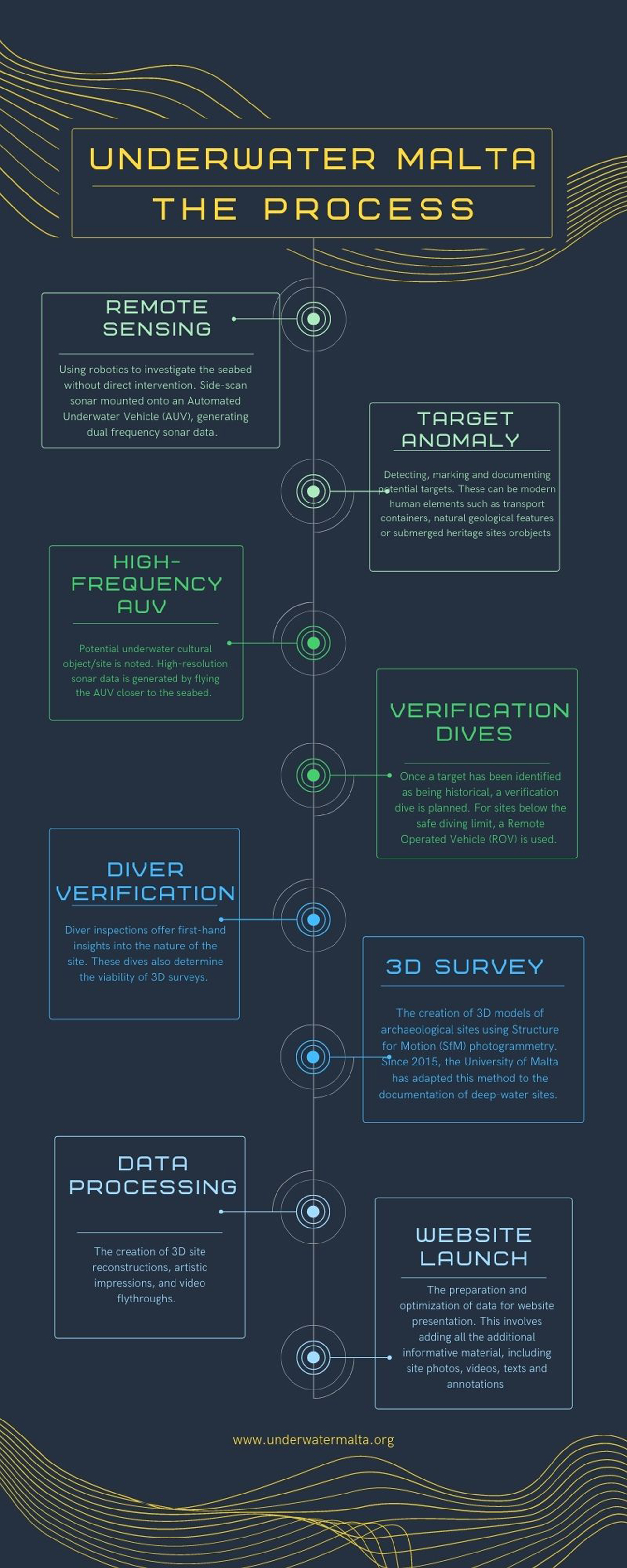
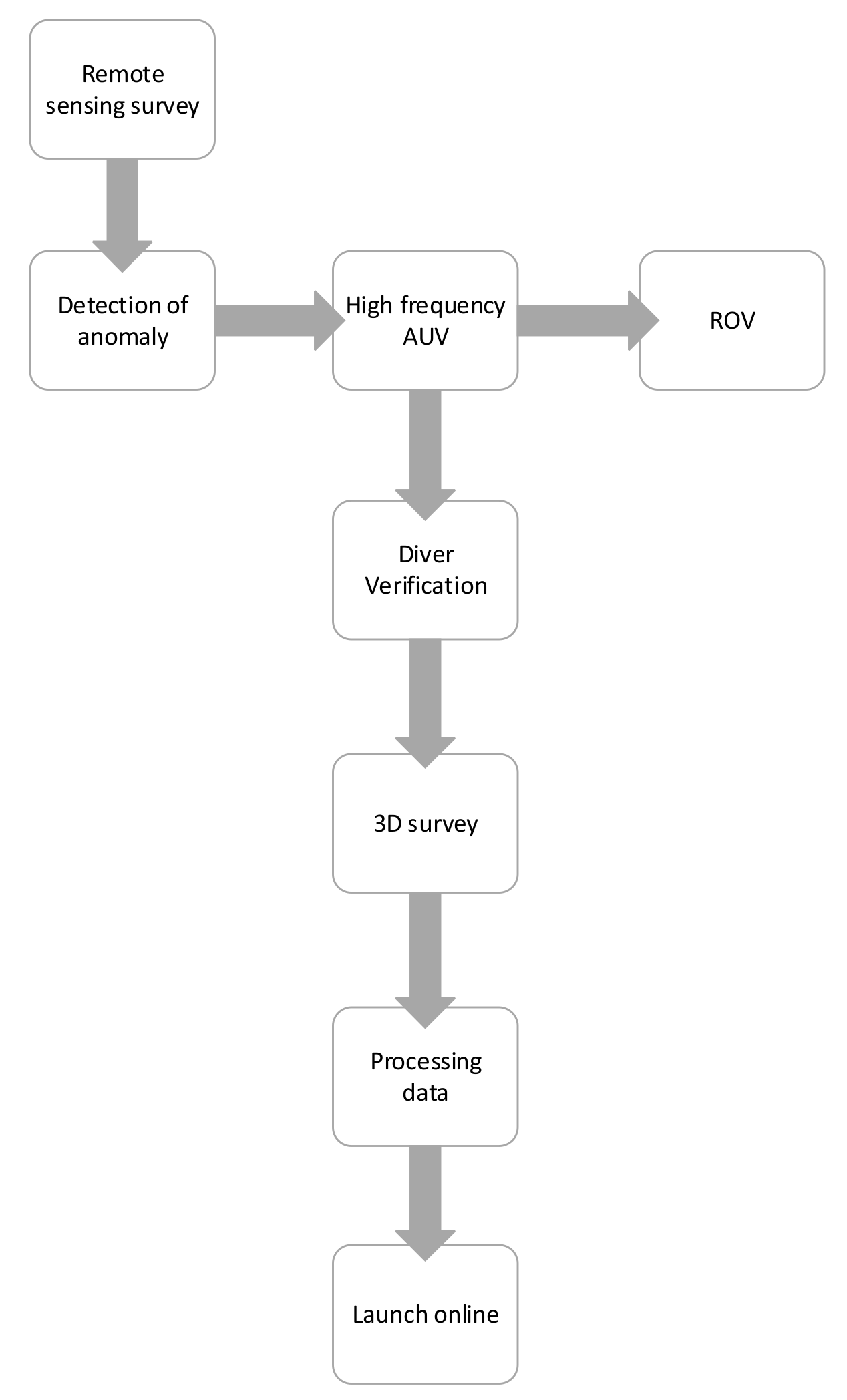
The launch of a UCH site on the UnderwaterMalta platform is the last step in a series of complex and time-consuming processes, revolving around initial remote sensing surveys, diver and 3D documentation, data processing, and background research. Eventual public dissemination is the last part of this series of studies. This section outlines this workflow, providing an insight into how an invisible site becomes visible and virtually accessible (
Figure 1).
The 2001 Convention places the onus on in situ preservation [
3] (Article 2.5) as best practice. This is where the applicability of marine geophysical survey techniques or remote sensing is important. It is not the intention of this paper to delve into the methodologies behind various remote sensing techniques. For a more detailed analysis of the application of side-scan sonar in underwater archaeology, refer to Gambin (2014) [
23]. Gambin et al. (2018) also provides a detailed insight into how remote sensing tools such as side-scan sonar and sub-bottom profilers aid in the discovery of ancient shipwreck sites, in this case the Phoenician shipwreck located outside Xlendi Bay, Gozo [
24]. The intention here is to expound on how these systems fit into the workflow of curation for UnderwaterMalta. Remote sensing refers to the use of robotics to investigate the seabed without direct intervention. Underwater robotics are controlled from a boat on the surface and are able to collect large amounts of data in a short period of time, and at depths beyond the diver limit [
25,
26,
27,
28]. The generated data has several uses. These vary from site location and identification to policy decisions and public outreach programmes. Side-scan sonar is a remote sensing tool that emits acoustic energy waves which reflect off the seabed. Acoustic shadows are generated behind areas that noticeably rise off the seabed, facilitating the identification of cultural remains. Such an approach allows for high-resolution surveys, providing details on the composition and structure of the seafloor [
26,
27]. The side-scan sonar utilized for the purpose of this workflow is a dual frequency (600khz/1600khz) EdgeTech side-scan sonar mounted onto an automated underwater vehicle (AUV). This is deployed for broad and high-resolution surveys up to a depth of 500 m. Since 2006, the University of Malta, in collaboration with the Superintendence of Cultural Heritage, has been conducting offshore side-scan sonar surveys aimed at locating, documenting, and recording Malta’s UCH. The data generated from this ingoing project are integral to protection and management decisions. These results form a foundation of comprehensive knowledge of UCH sites that allow heritage regulators and operators to make informed decisions on best practice.
The sonar is “flown” along a regular predetermined pattern using specialized planning software. The sonar system is interfaced with a precision GPS, ensuring that all captured data is georeferenced. The initial surveys were conducted using a towed setup, where the sonar is towed by the surface vessel. In recent years a different configuration has been used, where the sonar is mounted onto an AUV. An AUV is a mobile underwater robot that integrates several tools, including navigation systems and GPS, propulsion and direction modules, and a multitude of remote sensing equipment [
29,
30]. This setup allows the AUV to perform planned missions, and all that is required is a surface vessel with a launch platform and trained individuals for launch and recovery [
30]. The sonar mounted on the AUV used by the University of Malta is an EdgeTech high-and-low frequency sonar that generates 2D images of the seabed. These can be used to make measurements and provide accurate GPS positions. With such a setup, depths of up to 500 m can be, and are, surveyed.
Once data analysis commences, anomalies are detected, marked, and annotated. These anomalies can be human elements such as a modern transport container, an aircraft, or shipwreck, or they can be natural features that stand out on an otherwise homogenous seabed. Once a target anomaly is marked as one of importance, a second dive is planned with the AUV to generate higher resolution data. This is done by “flying” the AUV closer to the seabed, by narrowing the gap between survey lines and by using a higher sonar frequency. Since side-scan sonar utilises two transducers in opposing directions, a narrow strip known as the nadir is always recorded with no data. Flying the AUV closer to the seabed minimizes this gap [
28]. Once a target anomaly is successfully identified as being anthropogenic and historical, a planned verification is organized. This phase entails the use of a remote operated vehicle (ROV). An ROV is a tethered and remotely controlled marine robot that can vary in size from easily handled by an individual to requiring specialized lifting equipment [
1]. The ROV utilized throughout the workflow is the Gladius Mini, equipped with a 4k camera, lights, and a five-thruster propulsion system capable of operating at depths up to 100 m. In case of sites that are below the 100 m-contour, a Deep Tracker DTG3 ROV is deployed; rigged with a 4k camera and lights, it has two-thruster propulsion, autonomy of 8 h, and can reach up to 200 m of depth. These ROV systems provide the first imagery of a target anomaly, immediately allowing researchers to determine, or not, anthropogenic origin. These first images deliver insights into the marine environment, feeding into preliminary site context evaluations. If underwater cultural remains are confirmed, diver inspection surveys are planned.
Several factors influence the viability of diver surveys. Foremost amongst these is site depth. Divers only descend to manageable depths, and sites that are discovered outside this limit are only recorded through ROV footage. In previous decades, the 50 m contour line acted as a natural barrier to divers, however, today, this is no longer the case. Advances in diving technology, such as mixed gas and closed-circuit rebreather (CCR) diving, have broken through this barrier [
31,
32]. Diver inspections offer first-hand impressions of the site and allow for further insights into the site to be made. This includes elements such as site extent, depositional and site formation processes, signs of damage and collapse, types of marine growth, and even potential identification. These inspections also determine the viability of 3D surveys. Planning a 3D underwater survey is an enormous undertaking and requires that all essential equipment is available and functioning. This applies to the equipment needed to safely perform the dive as well as anything needed for the photogrammetric survey. The safe execution of a 3D underwater survey is not possible without stringent safety procedures. These include the surface support and support divers, all trained in emergency protocols, as well as the presence of a fast rigid inflatable boat (RIB) in case of emergency.
A parallel workflow to the generation of 3D data is documentary research. The majority of cultural remains located on the seabed around Malta are composed of First and Second World War metal wrecks and aircraft. Common sources for documentary research include line drawings and blueprints, as well as newspapers and war reports. These sources help researchers not only identify the generic identity of the target anomaly but potentially also its specific identity and the wrecking event. The discovery of UCH is only the beginning, and it is this documentary research that provides a context to the discovery. Without this context, the site remains invisible.
3. Modeling Methodology
Since 2015, the University of Malta has been developing a low-cost 3D modeling process. This revolves around the creation of 3D models of archaeological sites using Structure from Motion (SfM) photogrammetry. This method is widely used and well-documented [
33,
34]. However, over the course of the last few years, the deep-water photogrammetry process was developed out of the need to record excavation activities on the Phoenician shipwreck that is situated at a depth of 110 m outside Xlendi Bay, Gozo [
24].
The sites presented on UnderwaterMalta lie in waters of various depths, ranging from 2 meters to 120 m. Many of the newly discovered sites lie beyond the 50 m contour line, a characteristic feature of Malta’s UCH. These deeper sites present their own specific challenges, particularly in relation to the greatly reduced operating time on site. CCRs are used in order to maximize safety and minimize logistical challenges. In order to limit the total dive time to less than three hours, the operating time on the seabed is reduced to approximately 15 to 20 min. This limited window of operating time requires that dives are meticulously planned. This is often heavily reliant on prior side-scan sonar data which provides important information on the layout and dimensions of the wreck site.
3.1. Data Capture
The data for the 3D models on UnderwaterMalta was captured using either video or stills. Some of the initial models were filmed using HD (1920 × 1080) or 4k video cameras (4096 × 2160) or action cameras in video mode. Using specialized software, one to two frames per second were extracted from these videos. More recently, full-frame mirrorless cameras have been used to capture data, generating 24-megapixel (6000 × 4000) still images, in both JPG and RAW data formats. Typically, Sony A7III mirrorless full-frame cameras with 14-mm rectilinear lenses are used. These are coupled with powerful underwater video lights, providing anything from 40k to 80k lumens. Depending on the diver’s preference and the specific situation, either a manual trigger or an automatic intervalometer can be used. A combination of video and stills can also be utilized. A small video camera recording whilst the main camera captures stills is used as an extra tool to aid in the process of image alignment, particularly if a lack of overlap is noted in the stills. The video camera also acts as a secondary recording device, in case the main camera malfunctions.
The visibility underwater around the Maltese Islands is typically very good. Nevertheless, the distance to the object being captured is usually kept within 2 meters to 3 meters, allowing for adequate lighting for high quality texture on the object. In cases of low visibility, the distance is minimized in order to decrease the effect of the turbidity of the water. This increases the number of images required for good coverage, and also increases the challenge of keeping a consistent route over and around the object.
The cameras are set to take one-to-two stills per second. A short exposure time (around 1/150 s) is used to minimize the motion blur. The short exposure time is integral, since the ability to cover a deep-water wreck site in its entirety in the limited operating time available does not allow for the possibility of stopping to capture each still. On a terrestrial site such considerations are not applicable, making it a defining feature of an underwater methodology for deep-water sites. A small aperture, f8–f11, is used to have an adequate depth of field. Cameras are operated in manual exposure mode, with fixed exposure time and aperture. The slightly varying lighting conditions are compensated using auto ISO settings. A fixed, low ISO setting is ideally suited for photogrammetry. The depth of these sites and the very limited operating time does not allow for adjustments to the exposure settings during the recording phase. Often, prior to the capturing of data, a white balance is performed at depth using a neutral grey board. This reduces the need for color correction later in the processing of the data, particularly when data from several cameras is used in the creation of one 3D model. This practical step is not always possible. The recording of large wrecks in deep waters, often with a single opportunity to do so, does not allow for white balance calibration since it would limit the time available for the data capture. Wherever possible, prior to data capture, a number of markers and scale bars are positioned within the area to be recorded. This aids in the alignment of images in the processing software and provides scaling and, in some cases, also a local coordinate system. The models for UnderwaterMalta are produced mainly for visualization purposes, thus, exact geometrical correctness is not the primary objective. No special camera calibration is performed, and the camera parameters are estimated by the processing software.
A typical route followed by a diver for the data capture process is presented in
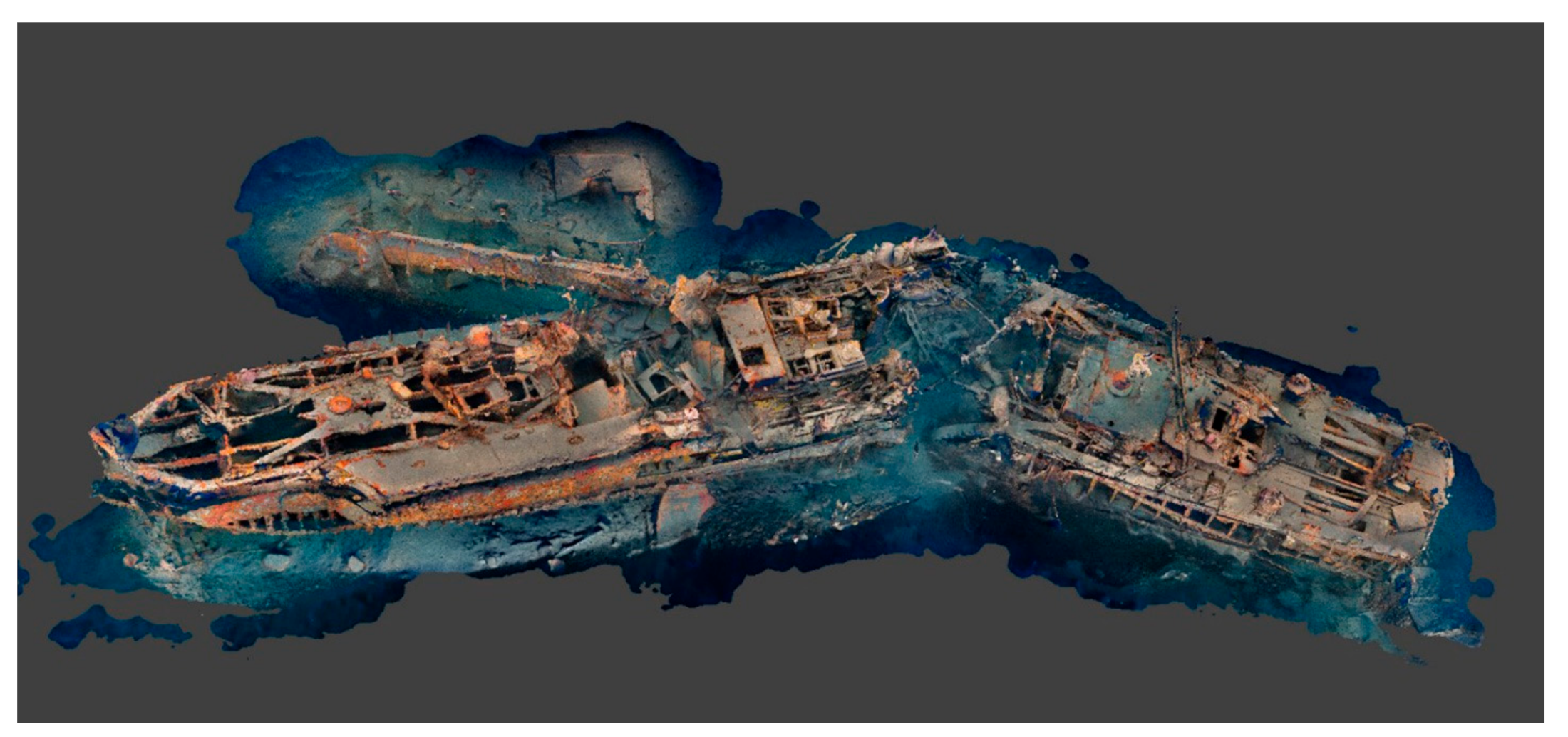
Figure 2. A medium-sized aircraft wreck with a wingspan of 18 meters, such as the Junkers Ju88, can be covered with 1500–2500 images. In contrast, a medium-sized shipwreck such as the HMS Southwold, which is in two 40 m sections, was covered with 4000 images per section. A large shipwreck such as the SS Polynesian, with a total length of over 150 m, requires approximately 10,000 images to achieve complete coverage. In addition, to the wreck itself, context is also included in the model for visualization purposes. Exact numbers cannot be better defined due to variables such as a) condition of the site (whether the hull is smooth or has buckled over), and b) visibility (the lower the visibility the closer one must be to the site and hence the more photographs that need to be captured). Moreover, the quantity of photographs listed above are satisfactory for the level of detail needed for UnderwaterMalta.
Entry level underwater navigation systems have become available during the last few years. These systems provide accurate enough location information during the data acquisition phase to ensure that the whole wreck site is covered. The location information facilitates the alignment of images during the processing phase. These systems can also track divers underwater, providing a basic means of communication between the divers and surface support. An underwater information system (UWIS) has recently been acquired and will be integrated into the aforementioned procedures (
Figure 3).
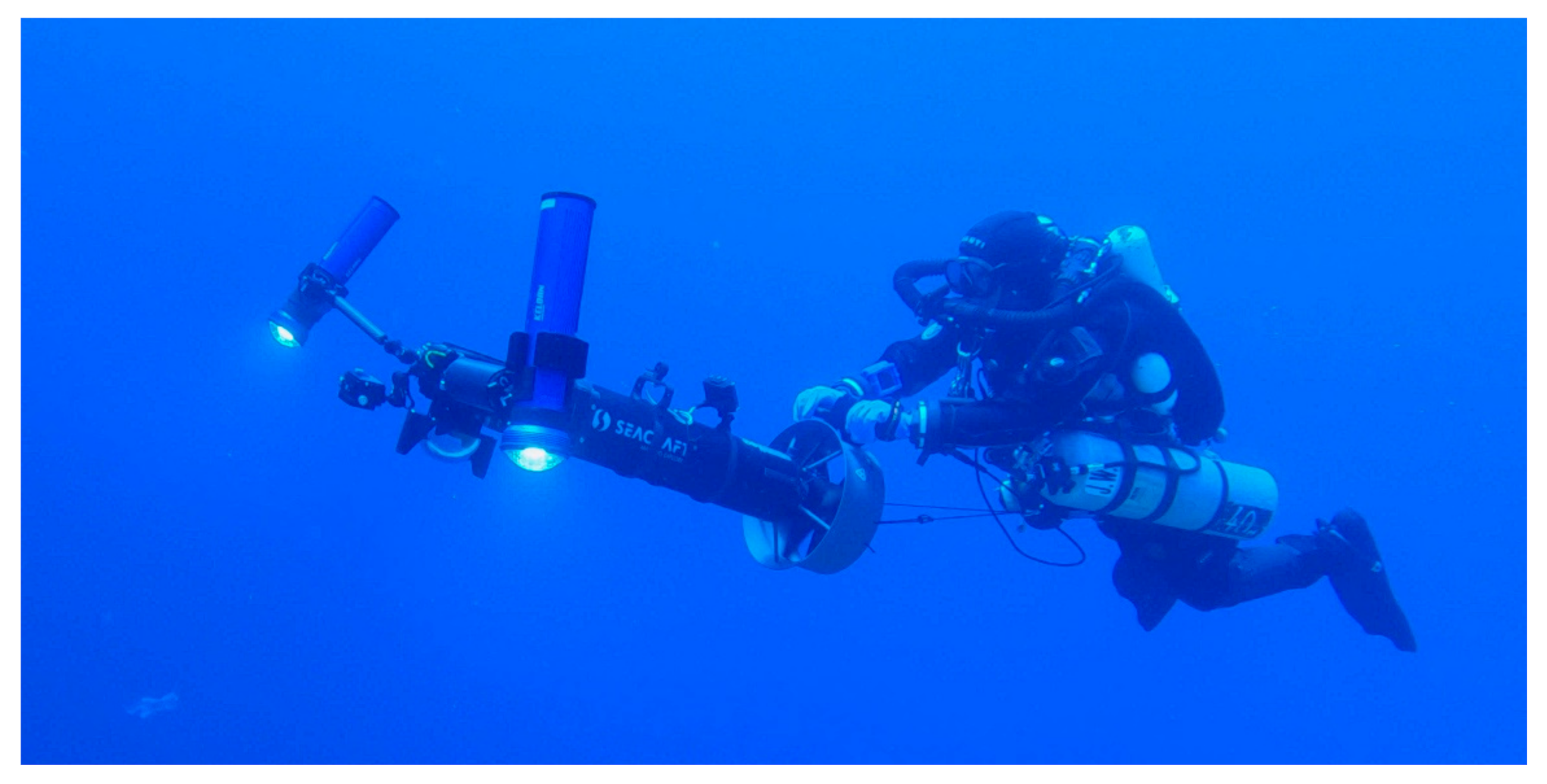
The use of diver propulsion vehicles (DPV) has recently been adapted to aid in the capturing of data for large wreck sites (
Figure 4). DPVs also provide an added level of safety to operating at deep sites with strong currents. The increase in speed on a DPV means that a higher shutter speed needs to be used, around 1/500 s. This usually necessitates the use of even brighter lights to keep ISO to a minimum. This technique is being developed for further use, as larger and deeper wreck sites are targeted for inclusion on UnderwaterMalta.
3.2. Processing of Data
It was decided early on in the planning phase of UnderwaterMalta to present to the general public and the diving community as broad a set of digital assets as possible. This intentional choice revolved around ensuring that all users, from the most basic to the computer literate, could experience and interact with the online platform.
The data capture process is followed by a processing workflow. The same set of data gathered throughout the process discussed in
Section 3.1 is used to produce the following assets.
An “artists impression” of the wreck that is presented on the landing page of UnderwaterMalta. A still from the 3D reconstruction is selected and blended onto a matching seabed using Photoshop. This is achieved through a process of blending, overlapping, treading, and color correction. This can take up to 3 h per wreck site to complete.
A 3D model that is simple to navigate and is fast to load. This is used for the landing page of the wreck-specific sub-site. These models are supplemented by annotations and links to other assets for that same wreck. Textual information on the background and history of the site, as well as archival photos and videos, are also included.
A video “flythrough” of the wreck, taking the viewer through a fixed path that simulates a diving experience, and allows for a diver’s perspective.
A full 3D model that can be zoomed, spun around, and examined at a detailed level. The popular Sketchfab platform is used for this purpose. This also allows the visitor to use a VR set to experience the model in a 1:1 scale.
The 3D reconstructions that are presently on UnderwaterMalta were prepared from data which was gathered over a number of years, starting in 2016. Whilst some of the data was gathered with the clear aim of presentation online, other datasets predate the conception of the museum substantially. Tools, techniques, and knowledge on the gathering of data and development of models has seen dramatic improvements over the last few years. This has contributed to the rapid increase in the quality of data gathered, and consequently also raised the quality of the processing output, namely the 3D models. For example, the source photographs used to create the models have evolved from stills lifted from HD video to 24-megapixel still photographs, which represent a substantial increase in resolution. Similarly, the quality of the software applications used has also evolved, with a variety of tools continuously in the process of being tested and utilized for this workflow.
The processing workflow outlined below focuses on the production of the 3D models and the software tools used. This workflow represents the data processing methodology adopted for the most recent additions to UnderwaterMalta. The wreck sites presented as examples below are all virtually accessible on the virtual museum.
A sample of the photographs used to build the model, typically between 1000 and 10,000 for a single wreck, are examined for sharpness and focus, and to determine whether sufficient overlap between photographs is present.
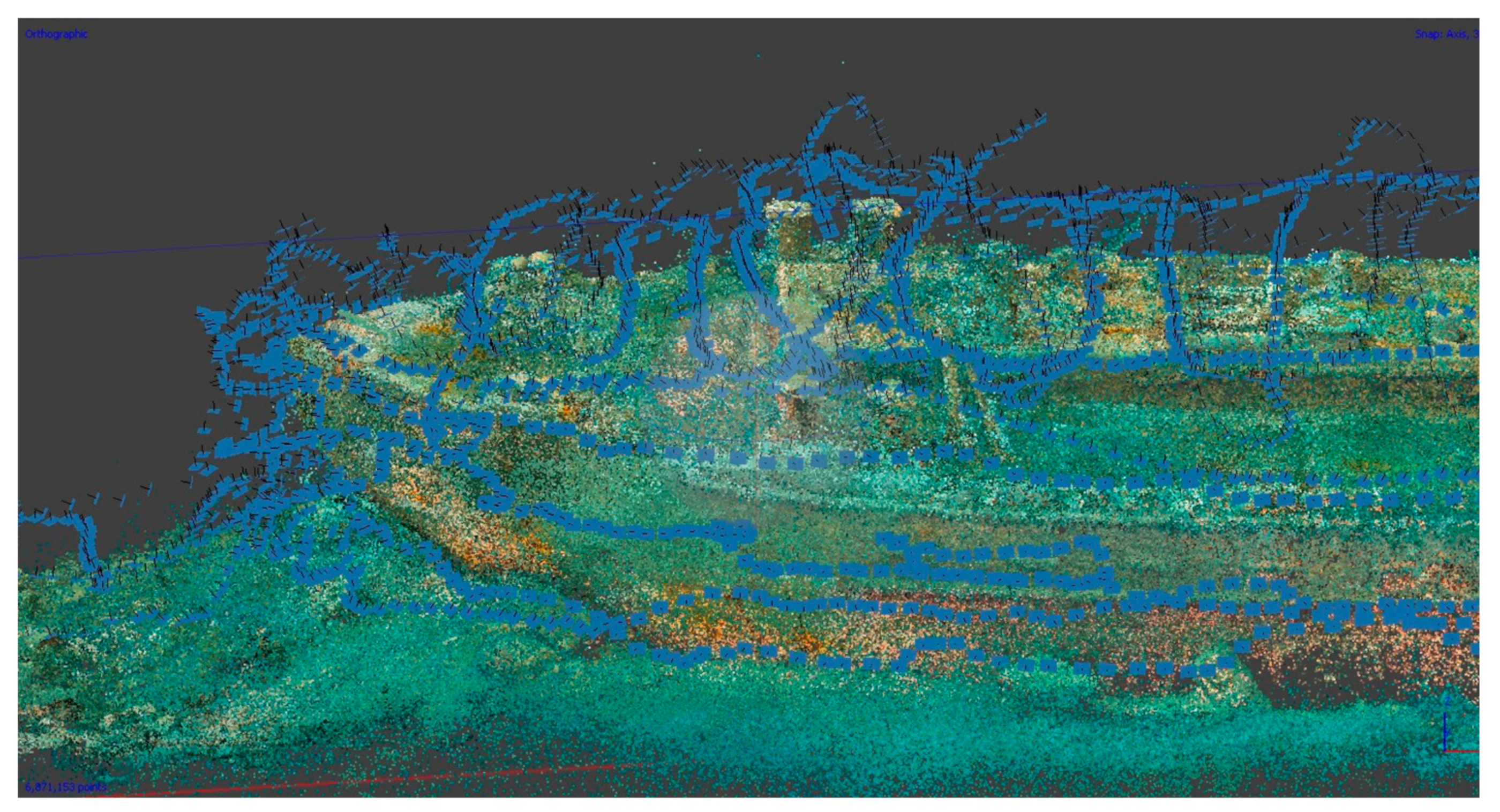
This is the most important stage. The software used for this process is Agisoft Metashape. The process of detecting what is known as tie points on the photograph and matching them with identical points in other photographs reconstructs the camera’s position in space for each image captured. A projection in 3D of these tie points is created, referred to as the sparse cloud (
Figure 5). This process can take many hours to run, depending on the quantity and quality of photographs and on the power of the hardware used. Agisoft Metashape also allows the use of a system of scale bars to scale the model in 1:1 (
Figure 6). If missing data is noted in the alignment phase, a decision to return to the site may be made in order to gather supplementary or replacement data. Such data is later combined with the original material. In some cases, the size of the wreck itself may necessitate multiple dives in order to capture it in its entirety.
The program RealityCapture utilizes the sparse cloud and the photographs to generate a detailed mesh of triangles, effectively creating the surface of the 3D model. This is usually monochromatic and can also be roughly colored, however, it is not the final product (
Figure 7).
The process of applying texture to the generated mesh is done in Agisoft Metashape. This is a process whereby the original photographs are used to generate a “wrapper” for the mesh. The result is a realistic, final 3D model (
Figure 8).
The “landing model” is the first visual seen by a user on UnderwaterMalta when a wreck site is selected for viewing. Two basic 360-degree rotations, in two different angles, are created using the software application Keyshot. Keyshot is a 3D rendering application that allows for the creation of 3D animations using the models created in the photogrammetry process. A set of stills are taken for each rotation and assembled together on WebRotate 360 to create a 3D simulation (
Figure 9).
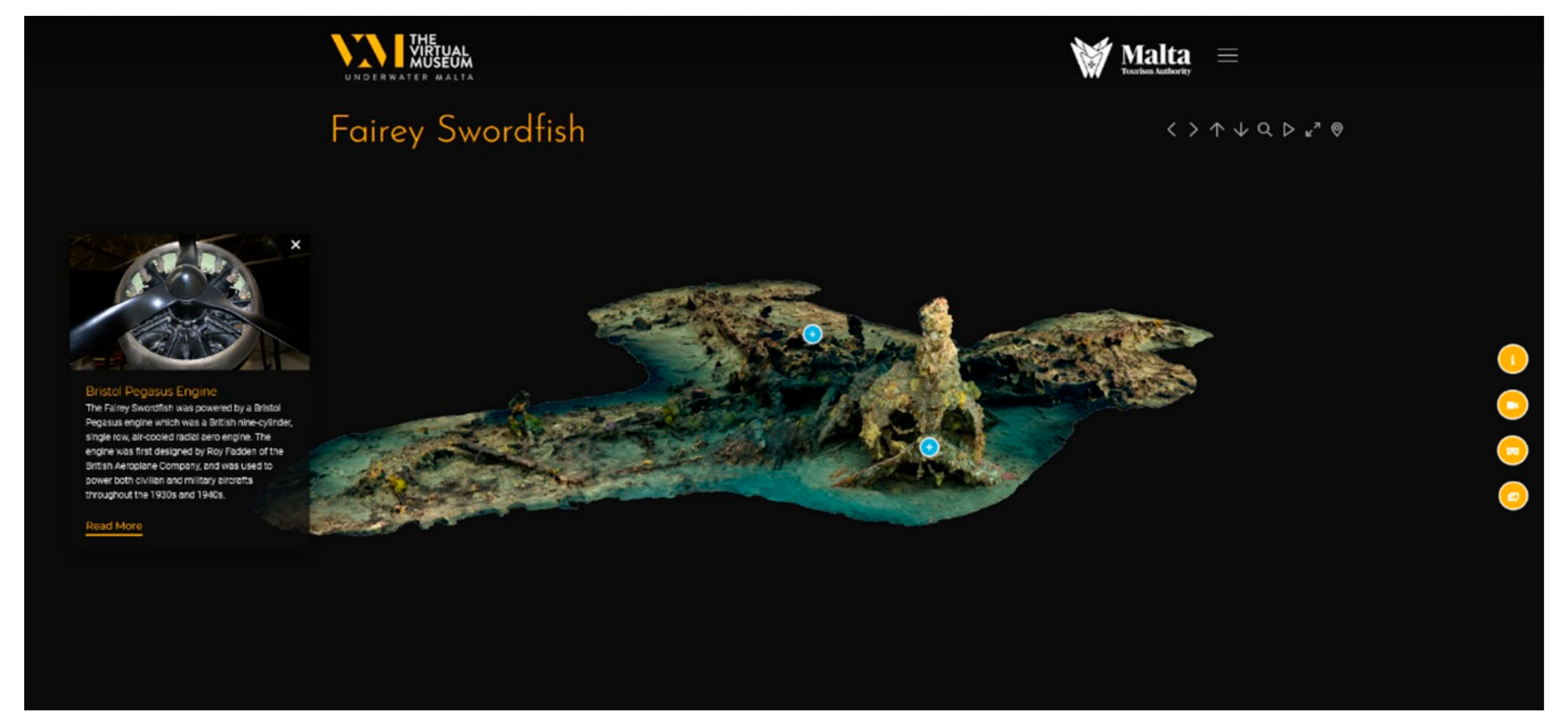
The textured model is loaded onto Sketchfab and configured, in terms of the background, the inclusion of logos and its initial position, for both normal and VR use (
Figure 10).
Using Keyshot, a flythrough of the model is rendered as an HD video. The resulting videos, as well as the Sketchfab model, are often used as promotional material for UnderwaterMalta.
A specific still is taken from the WebRotate 360 set and digitally enhanced (
Figure 11).
All the assets created out of this processing workflow, as well as any text, photographs, and videos, are integrated into the website proper. Links and annotations are developed on the “landing” WebRotate 360 model in order to present a cohesive context.
4. Curation
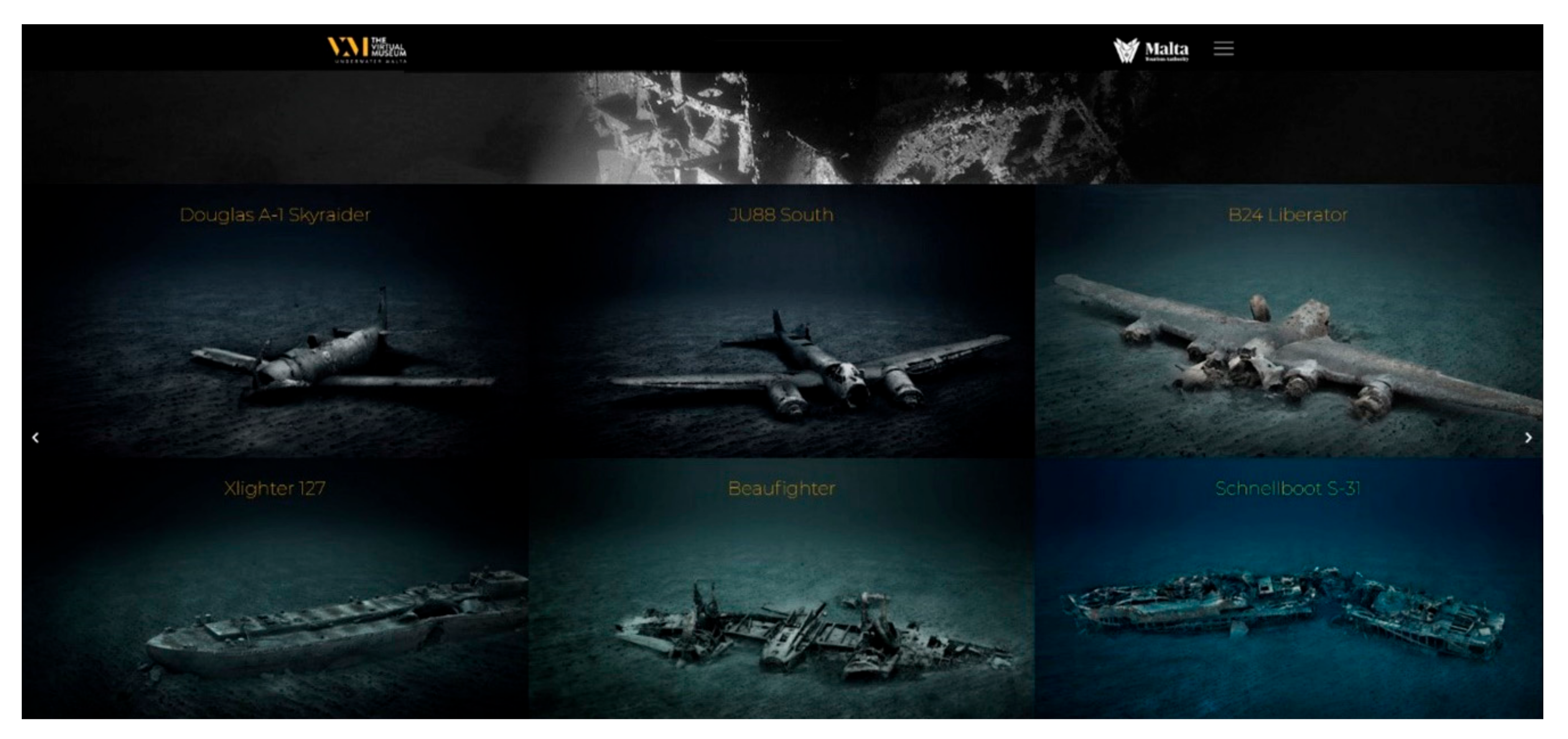
The curation of a virtual museum is similar to that of a physical museum. The launch of a new site on the platform does not signal the end of a lengthy process. Instead, it can be argued that a new process begins, namely that of curation and promotion. At the time of writing, fourteen sites are accessible on the UnderwaterMalta platform. It would be easy to limit the sites presented to the wealth of Second World War remains located on Malta’s seabed, and whilst it is true that these form the bulk of wrecked material that is discovered, they are by no means the only. The aim of the virtual museum is to make visible the uniqueness of Malta’s UCH, not just a specific segment of it.
The launch of a new site is determined by several factors. The initial process is facilitated through a system of classification utilized by Heritage Malta. This is based on a system developed by the Underwater Research Unit of the Gibraltar Museum. This quantitative technique for site evaluation was developed out of the identified need for a well-structured database that can inform the decision-making process. The onus here is placed on rapid evaluations [
35] (pp. 107–108). These are grounded on two central questions: (1) how significant is it? and (2) what is its current condition and how likely is deterioration in the short them? [
35] (p. 108). Based on these questions, a series of rating scores are applied to a single site, the outcome of which determines the conservation priority of that site [
35] (pp. 109–111). This system of scoring is applied to UCH sites under the protection and management of Heritage Malta and informs on policy decisions regarding site preservation and conservation. The choice of site for UnderwaterMalta is not immediately impacted by this scoring system, however, the digital data available for sites is very much determined by the system. What this means is that very often those sites considered to be under threat are surveyed and 3D recorded. The resulting 3D models are a method of documentation that provides an accurate record of the site, providing a benchmark from which further site deterioration can be monitored and plotted. A major advantage of this method is the availability of 3D models for public dissemination, readily available for use on the virtual museum platform.
Once the 3D surveys are completed and data processing is ongoing, extensive background research into each site is conducted. This revolves mainly around two axes; site particular and site generic information. The sites presented differ not only in terms of their historical identity but also on a spectrum of the generic and particular variety. Generic variation is expressed in the type of site represented. These vary from a 2700-year-old Phoenician shipwreck and Victorian-era cannons to Second World War Allied and Axis aircraft and shipwrecks from both world wars. This variety is further expressed in the type of site features presented. These usually emphasize the generic features of the wreck type. If the B24 Liberator aircraft is taken as an example, the generic focus is on the aircraft’s engine type, its armament capabilities, cockpit arrangement, and oxygen provisions. These features are not inherently or solely specific to the B24 wreck site found on the seabed off Malta but are rather meant to showcase standard features of this type of aircraft. Site particular variation revolves around aspects such as location, depth, type of seabed, condition of wreck, and history of discovery. The design of the platform itself revolved around the creation of a user-friendly space, one that provides an interactive experience for all sectors of the public and ensures that accessibility is not solely for those with extensive web-browsing experience. Each site is presented through a variety of media. This includes photography, video, 3D models, and VR. Informative text panels provide historical background information on the type of wreck and its local context. An intentional choice was the less academic and technical approach chosen for the textual information which broadens the site’s appeal.
5. Project Sustainability
The sustainability of the UnderwaterMalta platform is reliant on its ability to attract visitors and ultimately raise awareness about Malta’s UCH. Whilst the platform also acts as a repository for the digital reconstructions of these underwater sites, this is not its primary function.
The time needed to carry out this workflow is an important element of the sustainability of UnderwaterMalta. Time invested in the generation of these models and other museum content is very much dependent on the type of site being recorded and presented. Factors that need to be taken into consideration are the quality of data and processing power available. For small sites (1000–2000 images), four hours of active processing and four hours of background processing is standard. For medium-sized sites (2000–6000 images), 12 h of active processing and 24 h of background processing is needed. Large sites (6000–15,000 images) require a minimum of 24 h of active processing and up to 48 h of background processing. This does not include the hours spent diving the site and capturing the data, which often requires multiple dives. The depth of the sites also impacts the time needed, since deeper sites permit a shorter working window on the seabed and potentially longer decompression times. Once the data have been processed, it is prepared for launch on the website. This involves the preparation and optimization of the data, which is added to the software. Any video or photographic footage are edited and color-corrected. Two videos per site are created, the 360-degree rotation and the other showing the site through standard videography. The last task revolves around the addition of text and annotations. This process is usually completed within one to two working days.
The workflow outlined throughout this paper has varying purposes. From a scientific and research perspective, the 3D models act as baselines from which the condition and continued preservation of underwater sites can be monitored. This is particularly valid for metal wrecks, where corrosion or collapse may result in a potentially polluting event [
36,
37,
38,
39]. These same methods are also applied to wooden elements discovered underwater, where the fragility and instability of such remains make the application of 3D documentation an important tool, both for research and public outreach purposes [
32,
33]. Thus, these baseline 3D models allow for successive comparative analyses to be carried out whilst maintaining the integrity of the wreck site. This type of data feeds into the classification system used and allows heritage managers to create access protocols that are site-specific. Periodic site inspections may be compared to these baselines and if damage to the site is recorded, access parameters may change. Apart from such direct management applications, the generated digital models also have public outreach and access considerations. Digital fluency and the integration of Access in the 2001 Convention have created a scenario whereby innovative and imaginative tools are enabling the non-diving public to access UCH.
UnderwaterMalta was designed specifically as a public outreach tool, as a platform through which Malta’s UCH is made visible. To sustain this virtual identity, a virtual strategy needed to be created. When taken within the context of 4.66 billion internet users worldwide [
40], the internet can be identified as “the most direct and effective means archaeologists, managers, and educators have in reaching the public” [
41] (p. 128). Therefore, digital fluency can be identified as a primary management consideration.
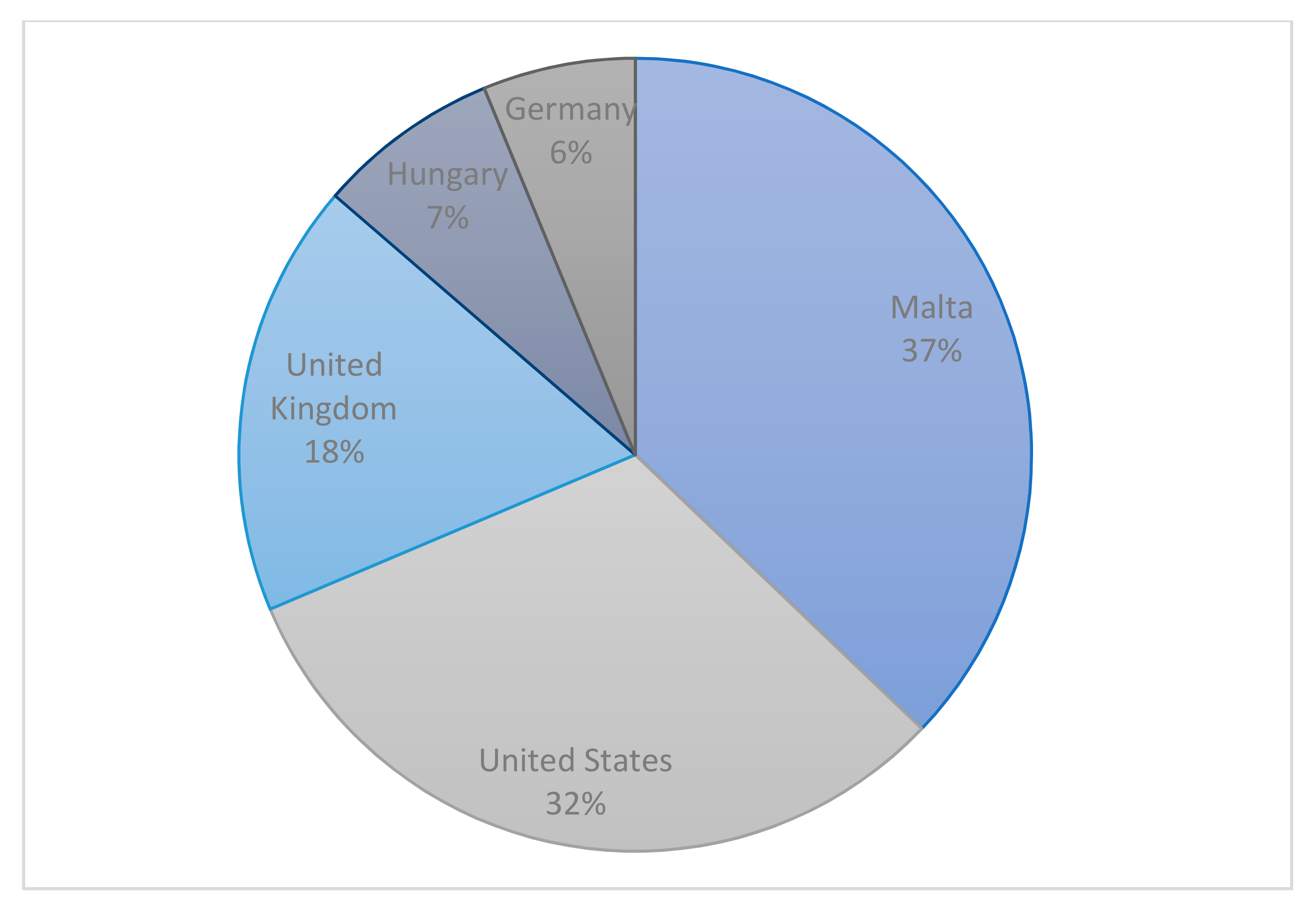
The Virtual Museum was launched at the end of June 2020. The initial focus was on attracting local visitors, mainly achieved through newspaper reports and social media posts. This local focus is reflected in the early visitor numbers, where the majority were located in Malta (
Figure 12). These numbers not only reflect this initial focus on attracting local visitors; but also reveal how visitors from the United Kingdom and the United States represent the largest initial foreign visitor numbers. This can be the result of language preferences and is also a reflection of the main English-speaking diver enthusiasts.
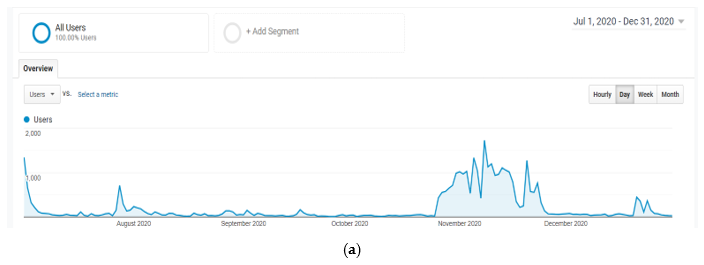
Following this initial stage, a broader global audience was targeted. International magazine editorials were targeted, focusing on themes such as diving, travel, culture, history, and archaeology. The effectiveness of such publications is reflected in spikes in visitor numbers, often directly relatable to the date of publication.
Figure 13a presents this correlation, where a spike in visitors at the end of July 2020 is directly related to a publication in an international dive magazine. Social media accounts for the virtual museum were first created at the end of November 2020, coinciding with the launch of new sites on the platform, also represented as spikes in visitor numbers.
Figure 13b presents this shift to a more international audience.
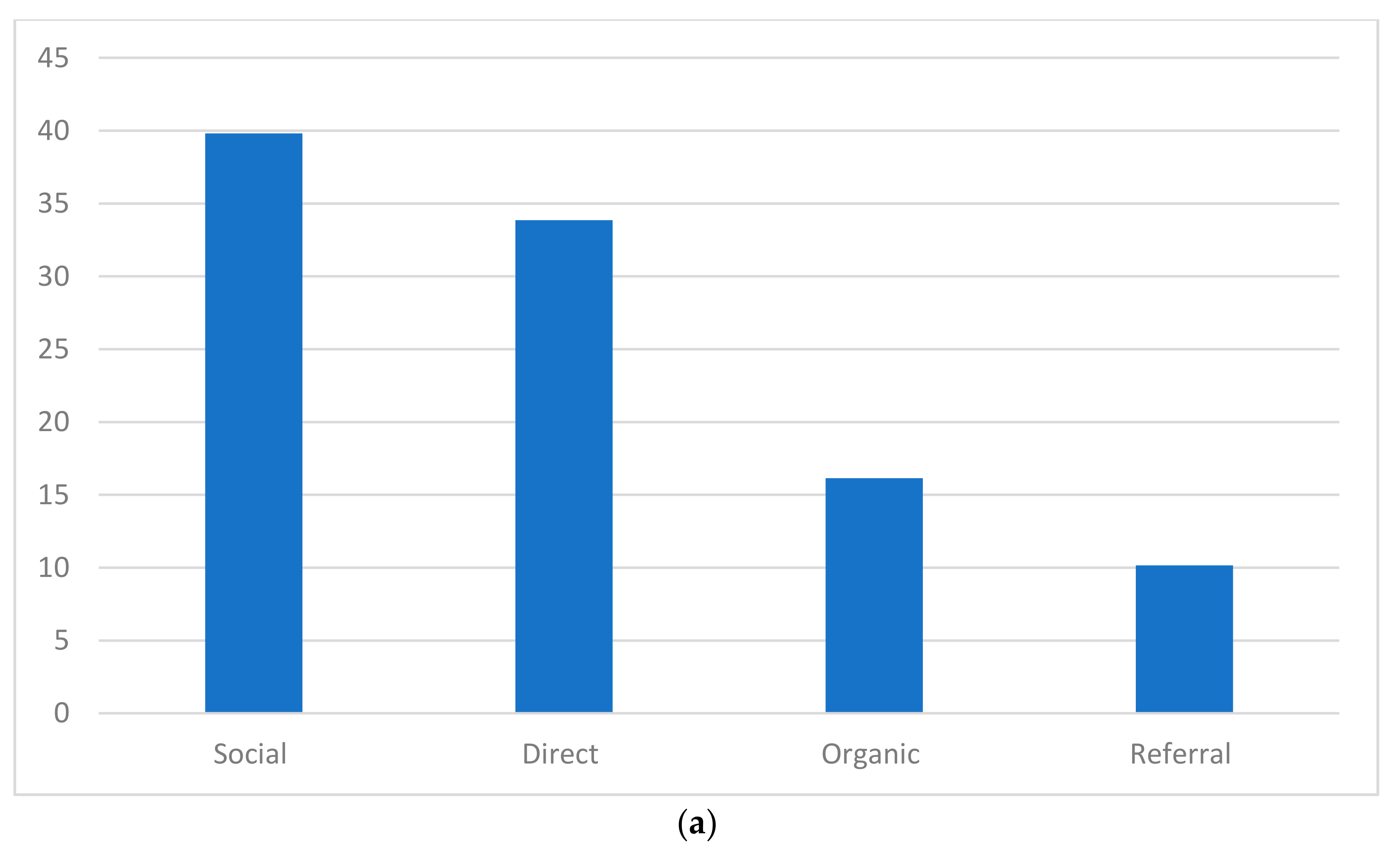
Social media has since been identified as the principal methods of curation and promotion, with Facebook and Instagram as the primary media channels. It must be noted that to date, this is being done through organic, rather than paid and boosted, options. Since its setup in November 2020, social media accounts for the majority of user interactions for the Virtual Museum, as represented in
Figure 14a. This is followed by direct interactions, which correlate to visitors directly inputting the website URL into a browser, rather than through other media channels. The launch of new sites is also exclusively marketed through social media, with positive results.
Figure 14b presents the fluctuations in visitor numbers on days where a new site was launched.
Based on the success of this marketing strategy, it is envisioned that social media will remain the primary channel of interaction offering “a dialogic, well-targeted and economic communication” [
42] (p. 99) between the virtual museum and the general public.
The sustainability of UnderwaterMalta is also dependent on its ability to adapt to new and emerging formats and platforms. This need to adapt has been an integral element since the virtual museum’s inception. The rapid development of technology has on the one hand resulted in digital assets, in particular 3D models, becoming larger, more detailed and therefore, more realistic. On the other hand, it has also allowed the general public to experience the results of the workflow outlined throughout this paper. These rapid developments include, for example, the visualization of massive point clouds, both on localized machines and on the internet. This requires an increase in internet bandwidth and in the power and sophistication of the software used to explore the 3D models. Another significant development is in VR goggles. These are undergoing a revolution, becoming smaller, lighter, and more importantly, standalone and untethered. Through the use of technology such as real-time eye tracking, optimum results can be projected to the user. The data captured for UnderwaterMalta is of a high resolution, and as digital technologies continue to evolve, it can be revisited and rebuilt for future output.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















