
High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA)

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Image Acquisition and Related In-Situ Operations
2.2. Photogrammetric Reconstruction
2.3. Initial as-Built Dataset
2.4. Vegetation Boundary for Evaluating Channel Width
2.5. GNSS RTK Survey: Cross-Section Profiles and Channel Width
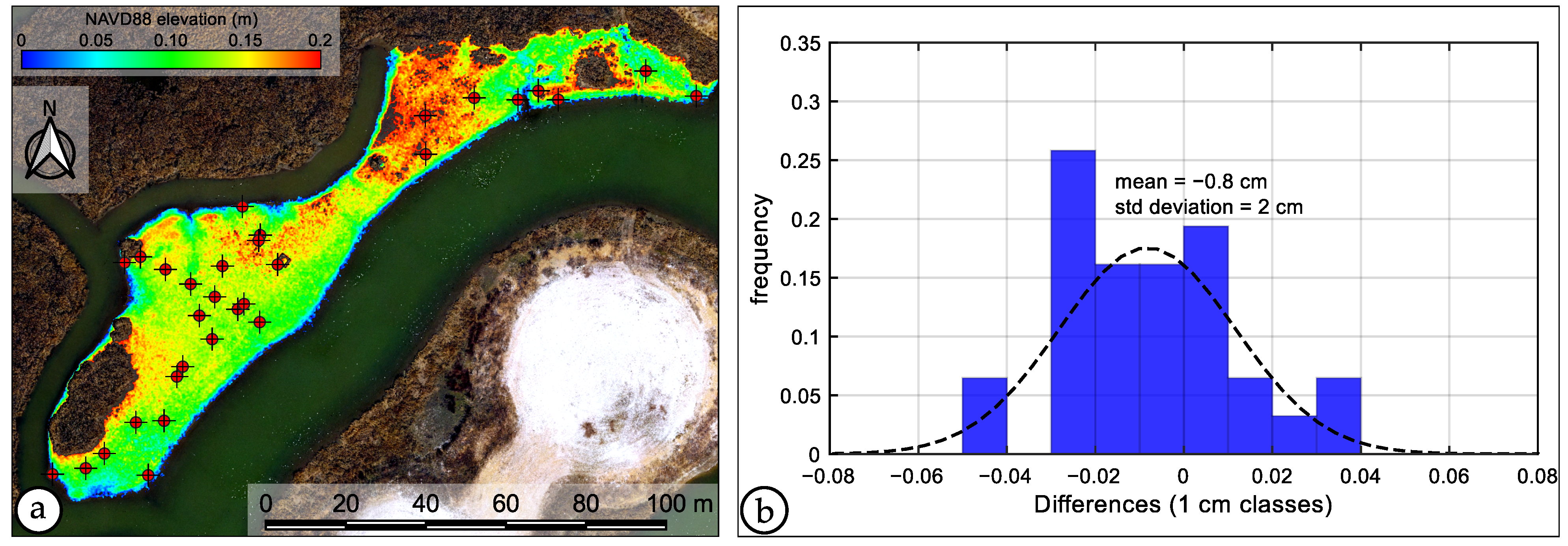
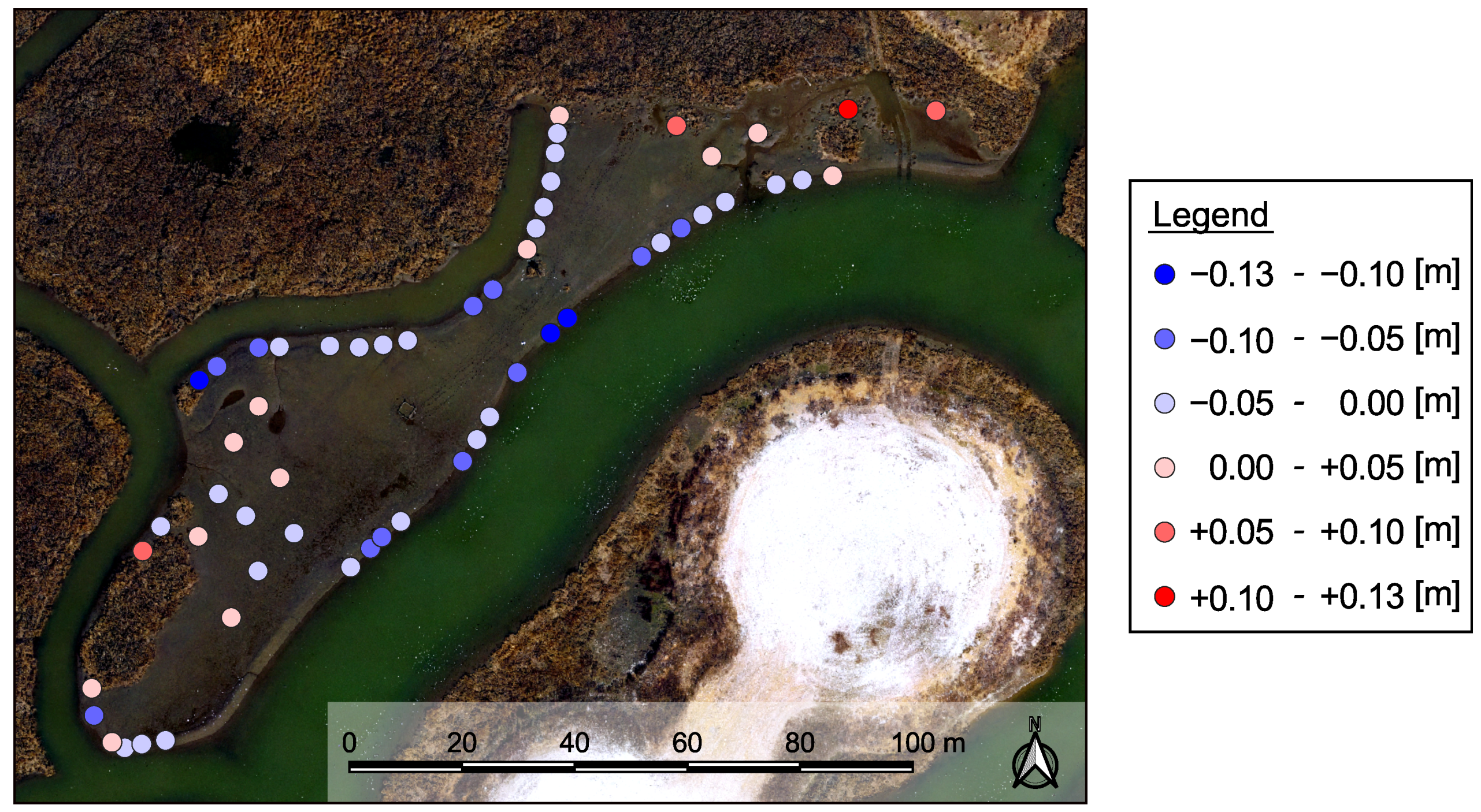
2.6. Elevation Variations on the Mudflat
3. Results
3.1. Vegetation Boundary for Evaluating Channel Width
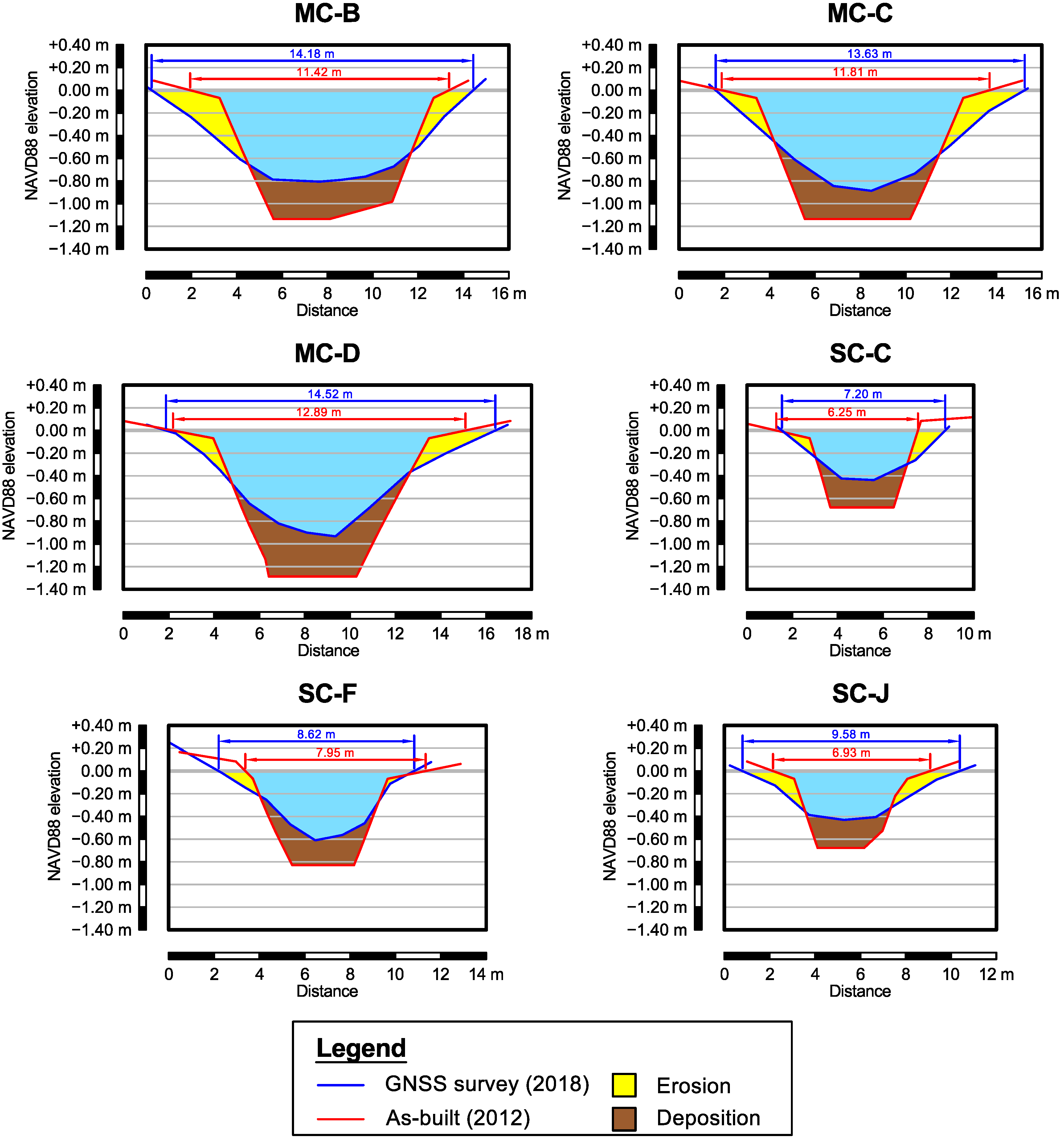
3.2. GNSS RTK Survey: Cross-Section Profiles and Channel Width
3.3. Elevation Variations on the Mudflat
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGL | Above Ground Level |
| ASLR | Absolute Sea Level Rise |
| BBA | Bundle Block Adjustment |
| C–1B | Cell 1B |
| CB | Chesapeake Bay |
| CP | Check Point |
| DEM | Digital Elevation Model |
| DJI–P3P | DJI Phantom 3 Professional |
| DTM | Digital Terrain Model |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| GSD | Ground Sample Distance |
| LiDAR | Light Detection And Ranging |
| MC | Main Channel |
| MDOT MPA | Maryland Department of Transportation–Maryland Port Administration |
| MES | Maryland Environmental Service |
| MVS | Multi-View-Stereo |
| NAD | North American Datum |
| NAVD | North American Vertical Datum |
| RGB | Red Green Blue |
| RMSE | Root Mean Square Error |
| RTK | Real-Time Kinematic |
| SC | Secondary Channel |
| SfM | Structure-from-Motion |
| SLR | Sea Level Rise |
| TLS | Terrestrial Laser Scanning |
| UAV | Unmanned Aerial Vehicle |
| USACE | United States Army Corps of Engineers |
| VP | Validation Point |
| WL | Water Level |
References
- Dada, O.A.; Agbaje, A.O.; Adesina, R.B.; Asiwaju-Bello, Y.A. Effect of coastal land use change on coastline dynamics along the Nigerian Transgressive Mahin mud coast. Ocean Coast. Manag. 2019, 168, 251–264. [Google Scholar] [CrossRef]
- Thoai, D.T.; Dang, A.N.; Oanh, N.T.K. Analysis of coastline change in relation to meteorological conditions and human activities in Ca mau cape, Viet Nam. Ocean Coast. Manag. 2019, 171, 56–65. [Google Scholar] [CrossRef]
- Moffett, K.B.; Nardin, W.; Silvestri, S.; Wang, C.; Temmerman, S. Multiple Stable States and Catastrophic Shifts in Coastal Wetlands: Progress, Challenges, and Opportunities in Validating Theory Using Remote Sensing and Other Methods. Remote Sens. 2015, 7, 10184–10226. [Google Scholar] [CrossRef]
- Dean, R.; Houston, J. Determining shoreline response to sea level rise. Coast. Eng. 2016, 114, 1–8. [Google Scholar] [CrossRef]
- Carrasco, A.; Ferreira, Ó.; Roelvink, D. Coastal lagoons and rising sea level: A review. Earth Sci. Rev. 2016, 154, 356–368. [Google Scholar] [CrossRef]
- Alizad, K.; Hagen, S.C.; Medeiros, S.C.; Bilskie, M.V.; Morris, J.T.; Balthis, L.; Buckel, C.A. Dynamic responses and implications to coastal wetlands and the surrounding regions under sea level rise. PLoS ONE 2016, 13, e0205176. [Google Scholar] [CrossRef]
- Nardin, W.; Edmonds, D.; Fagherazzi, S. Influence of vegetation on spatial patterns of sediment deposition in deltaic islands during flood. Adv. Water Resour. 2016, 93, 236–248. [Google Scholar] [CrossRef]
- Nardin, W.; Larsen, L.; Fagherazzi, S.; Wiberg, P. Tradeoffs among hydrodynamics, sediment fluxes and vegetation community in the Virginia Coast Reserve, USA. Estuar. Coast. Shelf Sci. 2018, 210, 98–108. [Google Scholar] [CrossRef]
- Leonardi, N.; Carnacina, I.; Donatelli, C.; Ganju, N.K.; Plater, A.J.; Schuerch, M.; Temmerman, S. Dynamic interactions between coastal storms and salt marshes: A review. Geomorphology 2018, 301, 92–107. [Google Scholar] [CrossRef]
- Passeri, D.L.; Hagen, S.C.; Plant, N.G.; Bilskie, M.V.; Medeiros, S.C.; Alizad, K. Tidal hydrodynamics under future sea level rise and coastal morphology in the Northern Gulf of Mexico. Earth’s Future 2016, 4, 159–176. [Google Scholar] [CrossRef]
- Alizad, K.; Hagen, S.C.; Morris, J.T.; Medeiros, S.C.; Bilskie, M.V.; Weishampel, J.F. Coastal wetland response to sea-level rise in a fluvial estuarine system. Earth’s Future 2016, 4, 483–497. [Google Scholar] [CrossRef]
- Passeri, D.L.; Hagen, S.C.; Bilskie, M.V.; Medeiros, S.C. On the significance of incorporating shoreline changes for evaluating coastal hydrodynamics under sea level rise scenarios. Nat. Hazards 2015, 75, 1599–1617. [Google Scholar] [CrossRef]
- Reef, R.; Schuerch, M.; Christie, E.K.; Möller, I.; Spencer, T. The effect of vegetation height and biomass on the sediment budget of a European saltmarsh. Estuar. Coast. Shelf Sci. 2018, 202, 125–133. [Google Scholar] [CrossRef]
- Baustian, J.J.; Mendelssohn, I.A.; Hester, M.W. Vegetation’s importance in regulating surface elevation in a coastal salt marsh facing elevated rates of sea level rise. Glob. Chang. Biol. 2012, 18, 3377–3382. [Google Scholar] [CrossRef]
- Broome, S.W.; Seneca, E.D.; Woodhouse, W.W. Tidal salt marsh restoration. Aquat. Bot. 1988, 32, 1–22. [Google Scholar] [CrossRef]
- Raposa, K.B.; Wasson, K.; Smith, E.; Crooks, J.A.; Delgado, P.; Fernald, S.H.; Ferner, M.C.; Helms, A.; Hice, L.A.; Mora, J.W.; et al. Assessing tidal marsh resilience to sea-level rise at broad geographic scales with multi-metric indices. Biol. Conserv. 2016, 204, 263–275. [Google Scholar] [CrossRef]
- Best, Ü.S.N.; Van der Wegen, M.; Dijkstra, J.; Willemsen, P.W.J.M.; Borsje, B.W.; Roelvink, D.J.A. Do salt marshes survive sea level rise? Modelling wave action, morphodynamics and vegetation dynamics. Environ. Model. Softw. 2018, 109, 152–166. [Google Scholar] [CrossRef]
- Morris, J.T.; Sundareshwar, P.V.; Nietch, C.T.; Kjerfve, B.; Cahoon, D.R. Responses of coastal wetlands to rising sea level. Ecology 2002, 83, 2869–2877. [Google Scholar] [CrossRef]
- Barbier, E.B.; Hacker, S.D.; Kennedy, C.; Koch, E.W.; Stier, A.C.; Silliman, B.R. The value of estuarine and coastal ecosystem services. Ecol. Monogr. 2011, 81, 169–193. [Google Scholar] [CrossRef]
- Schuerch, M.; Spencer, T.; Evans, B. Coupling between tidal mudflats and salt marshes affects marsh morphology. Mar. Geol. 2019, 412, 95–106. [Google Scholar] [CrossRef]
- Liu, Z.; Fagherazzi, S.; She, X.; Ma, X.; Xie, C.; Cui, B. Efficient tidal channel networks alleviate the drought-induced die-off of salt marshes: Implications for coastal restoration and management. Sci. Total Environ. 2020, 749, 141493. [Google Scholar] [CrossRef] [PubMed]
- Sallenger, A.H.; Doran, K.S.; Howd, P.A. Hotspot of accelerated sea-level rise on the Atlantic Coast of North America. Nat. Clim. Chang. 2012, 2, 884–888. [Google Scholar] [CrossRef]
- Lee, S.B.; Li, M.; Zhang, F. Impact of sea level rise on tidal range in Chesapeake and Delaware Bays. J. Geophys. Res. Ocean. 2017, 122, 3917–3938. [Google Scholar] [CrossRef]
- Xie, X.; Li, M.; Ni, W. Roles of Wind-Driven Currents and Surface Waves in Sediment Resuspension and Transport during a Tropical Storm. J. Geophys. Res. Ocean. 2018, 123, 8638–8654. [Google Scholar] [CrossRef]
- Boon, J.D.; Brubaker, J.M.; Forrest, D.R. Chesapeake bay land subsidence and sea level change: An evaluation of past and present trends and future outlook. In Applied Marine Science and Ocean Engineering; Special Report No., 425; Virginia Institute of Marine Science, William & Mary: Gloucester Point, VA, USA, 2010. [Google Scholar]
- Paul, S.; USACE. Sarbanes Ecosystem Restoration Project at Poplar Island, Talbot County, MD–Fact Sheet as of 1 February 2019. U.S. Army Corps of Engineers—Baltimore District. 2019. Available online: https://usace.contentdm.oclc.org/digital/collection/p16021coll11/id/3442 (accessed on 2 May 2019).
- Fleri, J.R.; Lera, S.; Gerevini, A.; Staver, L.; Nardin, W. Empirical observations and numerical modelling of tides, channel morphology, and vegetative effects on accretion in a restored tidal marsh. Earth Surf. Process. Landf. 2019. [Google Scholar] [CrossRef]
- Le Cozannet, G.; Garcin, M.; Yates, M.; Idier, D.; Meyssignac, B. Approaches to evaluate the recent impacts of sea-level rise on shoreline changes. Earth Sci. Rev. 2014, 138, 47–60. [Google Scholar] [CrossRef]
- Alesheikh, A.A.; Ghorbanali, A.; Nouri, N. Coastline change detection using remote sensing. Int. J. Environ. Sci. Technol. 2007, 4, 61–66. [Google Scholar] [CrossRef]
- Burningham, H.; French, J. Understanding coastal change using shoreline trend analysis supported by cluster-based segmentation. Geomorphology 2017, 282, 131–149. [Google Scholar] [CrossRef]
- Taddia, Y.; Corbau, C.; Zambello, E.; Russo, V.; Simeoni, U.; Russo, P.; Pellegrinelli, A. UAVS to assess the evolution of embryo dunes. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 363–369. [Google Scholar] [CrossRef]
- Lowe, M.K.; Adnan, F.A.F.; Hamylton, S.M.; Carvalho, R.C.; Woodroffe, C.D. Assessing Reef-Island Shoreline Change Using UAV-Derived Orthomosaics and Digital Surface Models. Drones 2019, 3, 44. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Gong, C.; Lei, S.; Bian, Z.; Liu, Y.; Zhang, Z.; Cheng, W. Analysis of the Development of an Erosion Gully in an Open-Pit Coal Mine Dump During a Winter Freeze-Thaw Cycle by Using Low-Cost UAVs. Remote Sens. 2019, 11, 1356. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the Accuracy of Georeferenced Point Clouds Produced via Multi-View Stereopsis from Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Drummond, C.D.; Harley, M.D.; Turner, I.L.; AMatheen, A.N.; Glamore, W.C. UAV applications to coastal engineering. In Proceedings of the Australasian Coasts & Ports Conference 2015: 22nd Australasian Coastal and Ocean Engineering Conference and the 15th Australasian Port and Harbour Conference, Engineers Australia and IPENZ, Auckland, New Zealand, 15–18 September 2015; p. 267. [Google Scholar]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Scarelli, F.M.; Sistilli, F.; Fabbri, S.; Cantelli, L.; Barboza, E.G.; Gabbianelli, G. Seasonal dune and beach monitoring using photogrammetry from UAV surveys to apply in the ICZM on the Ravenna coast (Emilia-Romagna, Italy). Remote Sens. Appl. Soc. Environ. 2017, 7, 27–39. [Google Scholar] [CrossRef]
- Taddia, Y.; Corbau, C.; Zambello, E.; Pellegrinelli, A. UAVs for Structure-From-Motion Coastal Monitoring: A Case Study to Assess the Evolution of Embryo Dunes over a Two-Year Time Frame in the Po River Delta, Italy. Sensors 2019, 19, 1717. [Google Scholar] [CrossRef] [PubMed]
- Casella, E.; Rovere, A.; Pedroncini, A.; Stark, C.P.; Casella, M.; Ferrari, M.; Firpo, M. Drones as tools for monitoring beach topography changes in the Ligurian Sea (NW Mediterranean). Geo Mar. Lett. 2016, 36, 151–163. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Kozarski, D.; Kogkas, S. Coastal areas mapping using UAV photogrammetry. Earth Resour. Environ. Remote Sens. Gis Appl. Viii 2017, 10428, 23. [Google Scholar] [CrossRef]
- Torres-Freyermuth, A.; Medellín, G.; Mendoza, E.T.; Ojeda, E.; Salles, P. Morphodynamic Response to Low-Crested Detached Breakwaters on a Sea Breeze-Dominated Coast. Water 2019, 11, 635. [Google Scholar] [CrossRef]
- Watanabe, Y.; Kawahara, Y. UAV Photogrammetry for Monitoring Changes in River Topography and Vegetation. Procedia Eng. 2016, 154, 317–325. [Google Scholar] [CrossRef]
- Rossini, M.; Mauro, B.D.; Garzonio, R.; Baccolo, G.; Cavallini, G.; Mattavelli, M.; Amicis, M.D.; Colombo, R. Rapid melting dynamics of an alpine glacier with repeated UAV photogrammetry. Geomorphology 2018, 304, 159–172. [Google Scholar] [CrossRef]
- Immerzeel, W.; Kraaijenbrink, P.; Shea, J.; Shrestha, A.; Pellicciotti, F.; Bierkens, M.; de Jong, S. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Thiebes, B.; Tomelleri, E.; Mejia-Aguilar, A.; Rabanser, M.; Schlögel, R.; Mulas, M.; Corsini, A. Assessment of the 2006 to 2015 Corvara landslide evolution using a UAV-derived DSM and orthophoto. In Proceedings of the 12th International Symposium on Landslides, Naples, Italy, 12–19 June 2016. [Google Scholar] [CrossRef]
- Hu, S.; Qiu, H.; Wang, X.; Gao, Y.; Wang, N.; Wu, J.; Yang, D.; Cao, M. Acquiring high-resolution topography and performing spatial analysis of loess landslides by using low-cost UAVs. Landslides 2018, 15, 593–612. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Grussenmeyer, P. Documentation of heritage buildings using close-range UAV images: Dense matching issues, comparison and case studies. Photogramm. Rec. 2017, 32, 206–229. [Google Scholar] [CrossRef]
- Russo, M.; Carnevali, L.; Russo, V.; Savastano, D.; Taddia, Y. Modeling and deterioration mapping of façades in historical urban context by close-range ultra-lightweight UAVs photogrammetry. Int. J. Archit. Herit. 2019, 13, 549–568. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Oost, K.V. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- James, M.; Robson, S.; d’Oleire Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Jaud, M.; Grasso, F.; Le Dantec, N.; Verney, R.; Delacourt, C.; Ammann, J.; Deloffre, J.; Grandjean, P. Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS Int. J. Geo Inf. 2016, 5, 50. [Google Scholar] [CrossRef]
- Taddia, Y.; Nardin, W.; Corbau, C.; Franchi, G.; Stevenson, C.J.; Staver, L.W. Channels’ shape evolution detected by uavs in a restored salt marsh. In Coastal Sediments 2019; World Scientific: Singapore, 2019; pp. 1519–1527. [Google Scholar] [CrossRef]
- DJI. Phantom 3 Professional User Manual v1.8. Available online: https://www.dji.com/it/phantom-3-pro/info (accessed on 24 January 2018).
- Agisoft. Agisoft Metashape User Manual, Professional Edition, Version 1.5. 2019. Available online: https://www.agisoft.com/pdf/metashape-pro_1_5_en.pdf (accessed on 18 February 2021).
- Medeiros, S.; Hagen, S.; Weishampel, J.; Angelo, J. Adjusting Lidar-Derived Digital Terrain Models in Coastal Marshes Based on Estimated Aboveground Biomass Density. Remote Sens. 2015, 7, 3507–3525. [Google Scholar] [CrossRef]
- Chassereau, J.E.; Bell, J.M.; Torres, R. A comparison of GPS and lidar salt marsh DEMs. Earth Surf. Process. Landf. 2011, 36, 1770–1775. [Google Scholar] [CrossRef]
- Morris, J.T.; Porter, D.; Neet, M.; Noble, P.A.; Schmidt, L.; Lapine, L.A.; Jensen, J.R. Integrating LIDAR elevation data, multi-spectral imagery and neural network modelling for marsh characterization. Int. J. Remote Sens. 2005, 26, 5221–5234. [Google Scholar] [CrossRef]
- Wulder, M.A.; Hall, R.J.; Coops, N.C.; Franklin, S.E. High Spatial Resolution Remotely Sensed Data for Ecosystem Characterization. BioScience 2004, 54, 511. [Google Scholar] [CrossRef]
- Reed, D.J. The response of coastal marshes to sea-level rise: Survival or submergence? Earth Surf. Process. Landf. 1995, 20, 39–48. [Google Scholar] [CrossRef]
- Fagherazzi, S.; Mariotti, G.; Leonardi, N.; Canestrelli, A.; Nardin, W.; Kearney, W.S. Salt Marsh Dynamics in a Period of Accelerated Sea Level Rise. J. Geophys. Res. Earth Surf. 2020, 125, e2019JF005200. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. A new algorithm for estimating ground elevation and vegetation characteristics in coastal salt marshes from high-resolution UAV-based LiDAR point clouds. Earth Surf. Process. Landf. 2020, 45, 3687–3701. [Google Scholar] [CrossRef]
- Parker, B.; Milbert, D.; Hess, K.; Gill, S. Integrating bathymetry, topography, and shoreline, and the importance of vertical datums. In Oceans 2003. Celebrating the Past... Teaming toward the Future; (IEEE Cat. No.03CH37492); IEEE: San Diego, CA, USA, 2003; Volume 2, pp. 758–764. [Google Scholar] [CrossRef]
- Marani, M.; Lanzoni, S.; Zandolin, D.; Seminara, G.; Rinaldo, A. Tidal meanders. Water Resour. Res. 2002, 38, 7–1–7–14. [Google Scholar] [CrossRef]
- Belliard, J.P.; Marco, N.D.; Carniello, L.; Toffolon, M. Sediment and vegetation spatial dynamics facing sea-level rise in microtidal salt marshes: Insights from an ecogeomorphic model. Adv. Water Resour. 2016, 93, 249–264. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal Mapping Using DJI Phantom 4 RTK in Post-Processing Kinematic Mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, W. Efficient SfM for Oblique UAV Images: From Match Pair Selection to Geometrical Verification. Remote Sens. 2018, 10, 1246. [Google Scholar] [CrossRef]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using dji phantom 4 rtk drone for topographic mapping of coastal areas. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 625–630. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A.; Osborn, J. The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis. Remote Sens. 2015, 7, 11933–11953. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Specifications | |
|---|---|
| Type | DJI Phantom 3 Professional |
| Take off weight | 1280 g |
| Max flight speed | 16 m/s |
| Max flight time | ≈23 min |
| Horizontal hovering accuracy | m |
| Vertical hovering accuracy | m |
| Camera Specifications | |
| Name | DJI FC300X |
| Type | RGB |
| Focal length | 3.6 mm |
| 35 mm equiv. focal length | 20 mm |
| Image resolution | |
| Field of view | 84° |
| GSD at 40 m altitude | ≈1.8 cm |
| Flight Plan Specifications | |
|---|---|
| Number of missions | 3–4 |
| Altitude | 40 m AGL |
| Longitudinal overlap | 80% |
| Side overlap | 60% |
| Speed of aircraft | ca. 5 m/s |
| Alignment | |
|---|---|
| Camera model | Normal |
| Accuracy | High |
| Key point limit | 200,000 |
| Tie point limit | 20,000 |
| Optimization | |
| Depth Maps and Dense Point Cloud | |
| Quality | High |
| Depth filtering | Aggressive |
| Ground Control Points | ||||
|---|---|---|---|---|
| East | North | Elevation | 3D | |
| Average [m] | ||||
| Min [m] | ||||
| Max [m] | ||||
| RMSE [m] | ||||
| Check Points | ||||
| East | North | Elevation | 3D | |
| Average [m] | ||||
| Min [m] | ||||
| Max [m] | ||||
| RMSE [m] | ||||
| Region | Max Difference [m] | Min Difference [m] | Average [m] | RMSE [m] |
|---|---|---|---|---|
| Salt Marsh (vegetated) | ||||
| Mudflat (un-vegetated) | ||||
| Channel Edges (un-vegetated) |
| Cross-Section | Orthomosaic (Apr. 2018) | Orthomosaic (Apr. 2019) | Orthomosaic (Nov. 2019) | (per Year) | (per Year) | (per Year) |
|---|---|---|---|---|---|---|
| MC-B | 14.9 m | 15.3 m | 15.8 m | +2.7% | ||
| MC-C | m | m | m | < | < | < |
| MC-D | m | m | m | < | < | < |
| SC-C | m | m | m | |||
| SC-F | m | m | m | < | < | < |
| SC-J | m | m | m | < | < | < |
| Cross-Section | As-Built (2012) | Survey (2018) | Variation Rate |
|---|---|---|---|
| MC-B | m | m | ≈ |
| MC-C | m | m | ≈ |
| MC-D | m | m | ≈ |
| SC-C | m | m | ≈ |
| SC-F | m | m | ≈ |
| SC-J | m | m | ≈ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taddia, Y.; Pellegrinelli, A.; Corbau, C.; Franchi, G.; Staver, L.W.; Stevenson, J.C.; Nardin, W. High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA). Remote Sens. 2021, 13, 1364. https://doi.org/10.3390/rs13071364
Taddia Y, Pellegrinelli A, Corbau C, Franchi G, Staver LW, Stevenson JC, Nardin W. High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA). Remote Sensing. 2021; 13(7):1364. https://doi.org/10.3390/rs13071364
Chicago/Turabian StyleTaddia, Yuri, Alberto Pellegrinelli, Corinne Corbau, Giulia Franchi, Lorie W. Staver, John Court Stevenson, and William Nardin. 2021. "High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA)" Remote Sensing 13, no. 7: 1364. https://doi.org/10.3390/rs13071364
APA StyleTaddia, Y., Pellegrinelli, A., Corbau, C., Franchi, G., Staver, L. W., Stevenson, J. C., & Nardin, W. (2021). High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA). Remote Sensing, 13(7), 1364. https://doi.org/10.3390/rs13071364