
Evaluating the Detection of Mesoscale Outflow Boundaries Using Scatterometer Winds at Different Spatial Resolutions

 ,
,  ,
,  , , and
, , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data
2.1. Advanced Scatterometer
2.2. MERRA-2
2.3. RAP
2.4. Next Generation Weather Radar (NEXRAD)
2.5. Buoy
3. Methodology
3.1. Ultra-High Resolution ASCAT Retrieval
3.2. Gradient Feature Algorithm
UHR Implementation
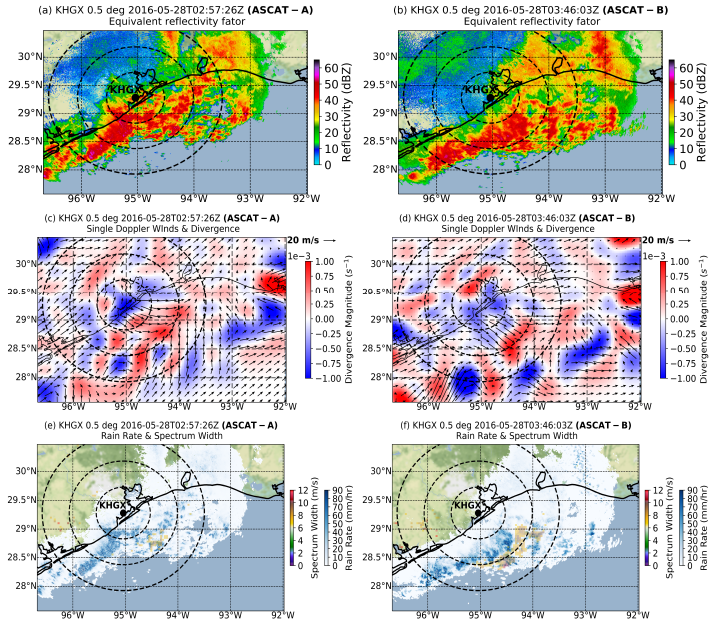
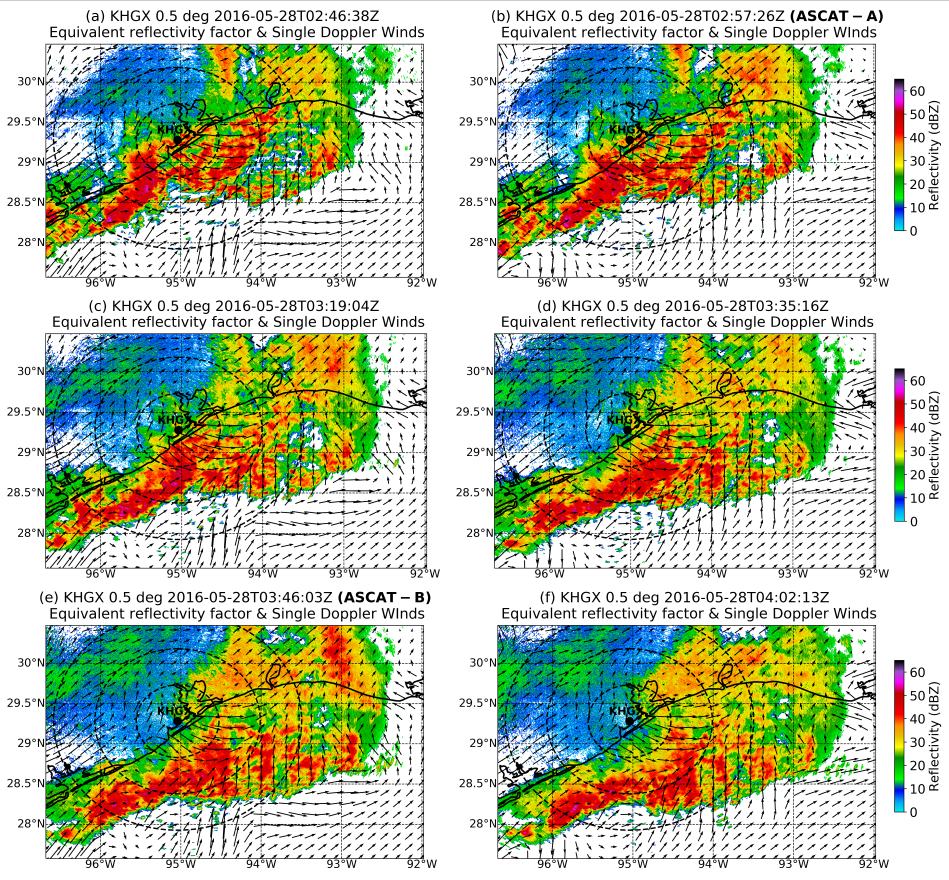
3.3. Ground Radar Processing
3.4. Scatterometer Wind Retrieval Correction
3.5. Resampling of Background Winds
4. Results and Discussion
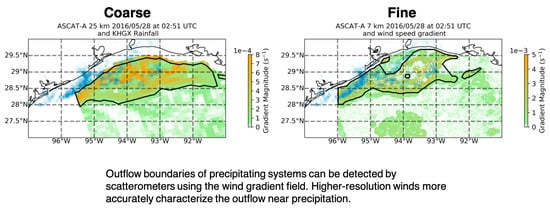
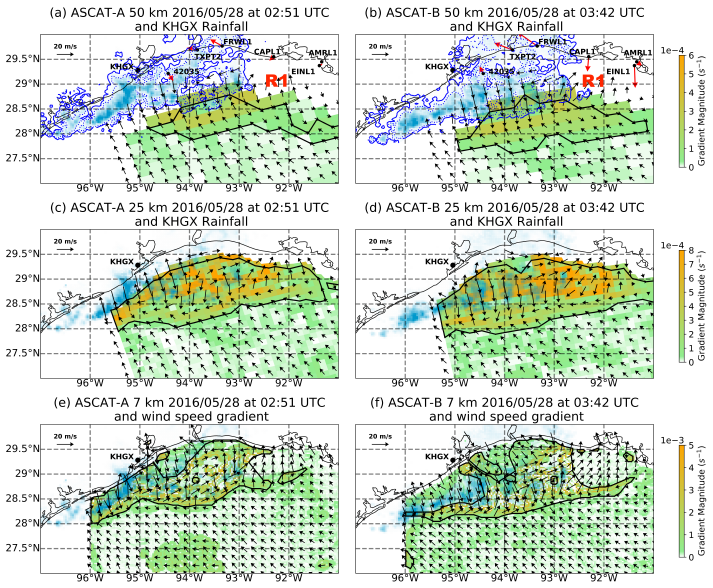
4.1. Outflow Boundary Detection
4.2. Impact of Different Scatterometer Product Resolutions
4.3. Effects of Background Winds on Scatterometer Retrievals
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ARM | Atmospheric Radiation Measurement |
| ASCAT | Advanced Scatterometer |
| AWDP | ASCAT Wind Data Processor |
| C-MAN | Coastal-Marine Automated Network |
| CSU | Colorado State University |
| DYNAMO | DYNAmics of Madden-Julian Oscillation |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| EUMETSAT | European Organization for the Exploitation of Meteorological Satellites |
| GF | Gradient Feature |
| GMF | Geophysical Model Function |
| L1B | Level 1b |
| L2 | Level 2 |
| MERRA-2 | Modern-Era Retrospective Analysis for Research and Applications |
| MetOp | Meteorological Operational |
| MCS | Mesoscale Convective System |
| MLE | Maximum Likelihood Estimation |
| NASA | National Aeronautics and Space Administration |
| NCEI | National Centers for Environmental Information |
| NDBC | National Data Buoy Center |
| NOAA | National Oceanic and Atmospheric Administration |
| NWP | National Weather Prediction |
| Py-ART | Python ARM Radar Toolkit |
| RAP | Rapid Refresh |
| RIJ | Rear-Inflow Jet |
| SRF | Spatial Response Function |
| SST | Sea Surface Temperature |
| TRMM | Tropical Rainfall Measurement Mission |
| UHR | Ultra-High Resolution |
| UTC | Universal Time Coordinated |
| VAD | Velocity Azimuth Display |
| VarQC | Variational quality control flag |
| WRF | Weather Research and Forecasting |
| 2DVAR | 2-D variational |
References
- Corfidi, S.F. Cold pools and MCS propagation: Forecasting the motion of downwind-developing MCSs. Weather Forecast. 2003, 18, 997–1017. [Google Scholar] [CrossRef]
- Nesbitt, S.W.; Cifelli, R.; Rutledge, S.A. Storm Morphology and Rainfall Characteristics of TRMM Precipitation Features. Mon. Weather Rev. 2006, 134, 2702–2721. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Houze, R.A., Jr. Global variability of mesoscale convective system anvil structure from A-Train satellite data. J. Clim. 2010, 23, 5864–5888. [Google Scholar] [CrossRef]
- Houze, R.A. 100 years of research on mesoscale convective systems. Meteorol. Monogr. 2018, 59, 17.1–17.54. [Google Scholar] [CrossRef]
- Young, G.S.; Perugini, S.M.; Fairall, C. Convective wakes in the equatorial western Pacific during TOGA. Mon. Weather Rev. 1995, 123, 110–123. [Google Scholar] [CrossRef] [Green Version]
- Weaver, J.F.; Nelson, S.P. Multiscale aspects of thunderstorm gust fronts and their effects on subsequent storm development. Mon. Weather Rev. 1982, 110, 707–718. [Google Scholar] [CrossRef] [Green Version]
- Forbes, G.S.; Wakimoto, R.M. A concentrated outbreak of tornadoes, downbursts and microbursts, and implications regarding vortex classification. Mon. Weather Rev. 1983, 111, 220–236. [Google Scholar] [CrossRef] [Green Version]
- Wilson, J.W.; Schreiber, W.E. Initiation of convective storms at radar-observed boundary-layer convergence lines. Mon. Weather Rev. 1986, 114, 2516–2536. [Google Scholar] [CrossRef] [Green Version]
- Wilson, J.W.; Foote, G.B.; Crook, N.A.; Fankhauser, J.C.; Wade, C.G.; Tuttle, J.D.; Mueller, C.K.; Krueger, S.K. The role of boundary-layer convergence zones and horizontal rolls in the initiation of thunderstorms: A case study. Mon. Weather Rev. 1992, 120, 1785–1815. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Hagos, S.; Rowe, A.K.; Burleyson, C.D.; Martini, M.N.; de Szoeke, S.P. Mechanisms of convective cloud organization by cold pools over tropical warm ocean during the AMIE/DYNAMO field campaign. J. Adv. Model. Earth Syst. 2015, 7, 357–381. [Google Scholar] [CrossRef] [Green Version]
- Moncrieff, M.W.; Liu, C.; Bogenschutz, P. Simulation, modeling, and dynamically based parameterization of organized tropical convection for global climate models. J. Atmos. Sci. 2017, 74, 1363–1380. [Google Scholar] [CrossRef]
- Thorpe, A.; Miller, M.; Moncrieff, M. Two-dimensional convection in non-constant shear: A model of mid-latitude squall lines. Q. J. R. Meteorol. Soc. 1982, 108, 739–762. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Fois, F.; Verhoef, A.; Zhao, C.; Lin, M.; Chen, G. SST dependence of Ku-and C-band backscatter measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2135–2146. [Google Scholar] [CrossRef]
- Long, D.G.; Collyer, R.; Arnold, D.V. Dependence of the normalized radar cross section of water waves on Bragg wavelength-wind speed sensitivity. IEEE Trans. Geosci. Remote Sens. 1996, 34, 656–666. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Bhowmick, S.A.; Chakraborty, A.; Sharma, A.; Sharma, S.; Seemanth, M.; Gupta, M.; Chakraborty, P.; Modi, J.; Misra, T. Post-launch calibration–validation and data quality evaluation of SCATSAT-1. Curr. Sci. 2019, 117, 973. [Google Scholar] [CrossRef]
- Bhowmick, S.A.; Cotton, J.; Fore, A.; Kumar, R.; Payan, C.; Rodríguez, E.; Sharma, A.; Stiles, B.; Stoffelen, A.; Verhoef, A. An assessment of the performance of ISRO’s SCATSAT-1 Scatterometer. Curr. Sci. 2019, 117, 959. [Google Scholar] [CrossRef]
- Misra, T.; Chakraborty, P.; Lad, C.; Gupta, P.; Rao, J.; Upadhyay, G.; Kumar, S.V.; Kumar, B.S.; Gangele, S.; Sinha, S.; et al. SCATSAT-1 Scatterometer: An improved successor of OSCAT. Curr. Sci. 2019, 117, 941. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A. Rain detection and quality control of SeaWinds. J. Atmos. Ocean. Technol. 2001, 18, 1171–1183. [Google Scholar] [CrossRef]
- Vogelzang, J.; Stoffelen, A.; Verhoef, A.; De Vries, J.; Bonekamp, H. Validation of two-dimensional variational ambiguity removal on SeaWinds scatterometer data. J. Atmos. Ocean. Technol. 2009, 26, 1229–1245. [Google Scholar] [CrossRef]
- Figa-Saldaña, J.; Wilson, J.J.; Attema, E.; Gelsthorpe, R.; Drinkwater, M.R.; Stoffelen, A. The advanced scatterometer (ASCAT) on the meteorological operational (MetOp) platform: A follow on for European wind scatterometers. Can. J. Remote Sens. 2002, 28, 404–412. [Google Scholar] [CrossRef]
- Lindsley, R.D.; Blodgett, J.R.; Long, D.G. Analysis and validation of high-resolution wind from ASCAT. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5699–5711. [Google Scholar] [CrossRef]
- Lindsley, R.D.; Long, D.G. Enhanced-resolution reconstruction of ASCAT backscatter measurements. IEEE Trans. Geosci. Remote Sens. 2015, 54, 2589–2601. [Google Scholar] [CrossRef]
- Garg, P.; Nesbitt, S.W.; Lang, T.J.; Priftis, G.; Chronis, T.; Thayer, J.D.; Hence, D.A. Identifying and Characterizing Tropical Oceanic Mesoscale Cold Pools using Spaceborne Scatterometer Winds. J. Geophys. Res. Atmos. 2020, 125, e2019JD031812. [Google Scholar] [CrossRef]
- Chou, K.H.; Wu, C.C.; Lin, S.Z. Assessment of the ASCAT wind error characteristics by global dropwindsonde observations. J. Geophys. Res. Atmos. 2013, 118, 9011–9021. [Google Scholar] [CrossRef]
- Remmers, T.; Cawkwell, F.; Desmond, C.; Murphy, J.; Politi, E. The potential of advanced scatterometer (ASCAT) 12.5 km coastal observations for offshore wind farm site selection in Irish waters. Energies 2019, 12, 206. [Google Scholar] [CrossRef] [Green Version]
- Kilpatrick, T.J.; Xie, S.P. ASCAT observations of downdrafts from mesoscale convective systems. Geophys. Res. Lett. 2015, 42, 1951–1958. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A.; Verhoef, A.; Verspeek, J. A new method for improving scatterometer wind quality control. IEEE Geosci. Remote Sens. Lett. 2012, 9, 579–583. [Google Scholar] [CrossRef]
- Fournier, M.B.; Haerter, J.O. Tracking the gust fronts of convective cold pools. J. Geophys. Res. Atmos. 2019, 124, 11103–11117. [Google Scholar] [CrossRef]
- Wakimoto, R.M. The life cycle of thunderstorm gust fronts as viewed with Doppler radar and rawinsonde data. Mon. Weather Rev. 1982, 110, 1060–1082. [Google Scholar] [CrossRef] [Green Version]
- Troxel, S.; Frankel, B.; Echels, B.; Rolfe, C. An Improved Gust Front Detection Capability for the ASR-9 WSP. In Proceedings of the 10th Conference Aviation, Range, Aerospace Meteorology (ARAM), Portland, OR, USA, 13–16 May 2002; pp. 379–382. [Google Scholar]
- Hwang, Y.; Yu, T.Y.; Lakshmanan, V.; Kingfield, D.M.; Lee, D.I.; You, C.H. Neuro-fuzzy gust front detection algorithm with S-band polarimetric radar. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1618–1628. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, P.; Wang, D.; Jia, H. An algorithm for automated identification of gust fronts from Doppler radar data. J. Meteorol. Res. 2018, 32, 444–455. [Google Scholar] [CrossRef]
- Priftis, G.; Lang, T.; Chronis, T. Combining ASCAT and NEXRAD retrieval analysis to explore wind features of mesoscale oceanic systems. J. Geophys. Res. Atmos. 2018, 123, 10–341. [Google Scholar] [CrossRef]
- Verhoef, A.; Portabella, M.; Stoffelen, A. High-resolution ASCAT scatterometer winds near the coast. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2481–2487. [Google Scholar] [CrossRef] [Green Version]
- Verhoef, A.; Stoffelen, A. Algorithm Theoretical Basis Document for the OSI SAF Wind Products Version 1.1. Document External Project: SAF; Technical Report; OSI/CDOP2/KNMI/SCI/MA/197: EUMETSAT: Darmstadt, Germany, 2014. [Google Scholar]
- Vogelzang, J.; Stoffelen, A.; Verhoef, A.; Figa-Saldaña, J. On the quality of high-resolution scatterometer winds. J. Geophys. Res. Ocean. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Stoffelen, A.; Portabella, M. On Bayesian scatterometer wind inversion. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1523–1533. [Google Scholar] [CrossRef]
- Lin, W.; Portabella, M.; Stoffelen, A.; Verhoef, A. On the characteristics of ASCAT wind direction ambiguities. Atmos. Meas. Tech. 2013, 6, 1053. [Google Scholar] [CrossRef] [Green Version]
- de Kloe, J.; Stoffelen, A.; Verhoef, A. Improved use of scatterometer measurements by using stress-equivalent reference winds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2340–2347. [Google Scholar] [CrossRef]
- Gelaro, R.; McCarty, W.; Suárez, M.J.; Todling, R.; Molod, A.; Takacs, L.; Randles, C.A.; Darmenov, A.; Bosilovich, M.G.; Reichle, R.; et al. The modern-era retrospective analysis for research and applications, version 2 (MERRA-2). J. Clim. 2017, 30, 5419–5454. [Google Scholar] [CrossRef]
- Benjamin, S.G.; Weygandt, S.S.; Brown, J.M.; Hu, M.; Alexander, C.R.; Smirnova, T.G.; Olson, J.B.; James, E.P.; Dowell, D.C.; Grell, G.A.; et al. A North American hourly assimilation and model forecast cycle: The Rapid Refresh. Mon. Weather Rev. 2016, 144, 1669–1694. [Google Scholar] [CrossRef]
- Hersbach, H. CMOD5. N: A C-Band Geophysical Model Function for Equivalent Neutral Wind; European Centre for Medium-Range Weather Forecasts: Reading, UK, 2008. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Lee, D.T.; Schachter, B.J. Two algorithms for constructing a Delaunay triangulation. Int. J. Comput. Inf. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]
- Helmus, J.J.; Collis, S.M. The Python ARM Radar Toolkit (Py-ART), a library for working with weather radar data in the Python programming language. J. Open Res. Softw. 2016, 4. [Google Scholar] [CrossRef] [Green Version]
- Lang, T.J.; Ahijevych, D.A.; Nesbitt, S.W.; Carbone, R.E.; Rutledge, S.A.; Cifelli, R. Radar-observed characteristics of precipitating systems during NAME 2004. J. Clim. 2007, 20, 1713–1733. [Google Scholar] [CrossRef] [Green Version]
- Cifelli, R.; Chandrasekar, V.; Lim, S.; Kennedy, P.; Wang, Y.; Rutledge, S. A new dual-polarization radar rainfall algorithm: Application in Colorado precipitation events. J. Atmos. Ocean. Technol. 2011, 28, 352–364. [Google Scholar] [CrossRef] [Green Version]
- Lang, T.J.; Dolan, B.; Fuchs, B.; Hein, P.; Thompson, E.; Collis, S.; Helmus, J.; Guy, N. Marshall Space Flight Center and the Open-Source Radar Software Revolution; AMS: Boston, MA, USA, 2015. [Google Scholar]
- Xu, Q.; Liu, S.; Xue, M. Background error covariance functions for vector wind analyses using Doppler-radar radial-velocity observations. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2006, 132, 2887–2904. [Google Scholar] [CrossRef]
- Browning, K.; Wexler, R. The determination of kinematic properties of a wind field using Doppler radar. J. Appl. Meteorol. 1968, 7, 105–113. [Google Scholar] [CrossRef]
- Fast, J.D.; Newsom, R.K.; Allwine, K.J.; Xu, Q.; Zhang, P.; Copeland, J.; Sun, J. An evaluation of two NEXRAD wind retrieval methodologies and their use in atmospheric dispersion models. J. Appl. Meteorol. Climatol. 2008, 47, 2351–2371. [Google Scholar] [CrossRef] [Green Version]
- Portabella, M.; Stoffelen, A.; Lin, W.; Turiel, A.; Verhoef, A.; Verspeek, J.; Ballabrera-Poy, J. Rain effects on ASCAT-retrieved winds: Toward an improved quality control. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2495–2506. [Google Scholar] [CrossRef]
- Chen, Q.; Fan, J.; Hagos, S.; Gustafson, W.I., Jr.; Berg, L.K. Roles of wind shear at different vertical levels: Cloud system organization and properties. J. Geophys. Res. Atmos. 2015, 120, 6551–6574. [Google Scholar] [CrossRef]
- Raspaud, M.; Hoese, D.; Dybbroe, A.; Lahtinen, P.; Devasthale, A.; Itkin, M.; Hamann, U.; Rasmussen, L.Ø.; Nielsen, E.S.; Leppelt, T.; et al. PyTroll: An open-source, community-driven Python framework to process earth observation satellite data. Bull. Am. Meteorol. Soc. 2018, 99, 1329–1336. [Google Scholar] [CrossRef] [Green Version]
- Klingle, D.L.; Smith, D.R.; Wolfson, M.M. Gust front characteristics as detected by Doppler radar. Mon. Weather Rev. 1987, 115, 905–918. [Google Scholar] [CrossRef] [Green Version]
- Hermes, L.G.; Witt, A.; Smith, S.D.; Klingle-Wilson, D.; Morris, D.; Stumpf, G.J.; Eilts, M.D. The gust-front detection and wind-shift algorithms for the Terminal Doppler Weather Radar System. J. Atmos. Ocean. Technol. 1993, 10, 693–709. [Google Scholar] [CrossRef] [Green Version]
- Alkhouli, O.; DeBrunner, V. Gust Front Detection in Weather Radar Images by Entropy Matched Functional Template. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; Volume 1, pp. I–645. [Google Scholar]
- Houze, R.A. Mesoscale convective systems. Rev. Geophys. 2004, 42. [Google Scholar] [CrossRef] [Green Version]
- Smull, B.F.; Houze, R.A. Rear inflow in squall lines with trailing stratiform precipitation. Mon. Weather Rev. 1987, 115, 2869–2889. [Google Scholar] [CrossRef] [Green Version]
- Keene, K.M.; Schumacher, R.S. The bow and arrow mesoscale convective structure. Mon. Weather Rev. 2013, 141, 1648–1672. [Google Scholar] [CrossRef] [Green Version]
- Borque, P.; Nesbitt, S.W.; Trapp, R.J.; Lasher-Trapp, S.; Oue, M. Observational Study of the Thermodynamics and Morphological Characteristics of a Midlatitude Continental Cold Pool Event. Mon. Weather Rev. 2020, 148, 719–737. [Google Scholar] [CrossRef]
- Lang, T.; Guy, N. Diagnosing turbulence for research aircraft safety using open source toolkits. Results Phys. 2017, 7, 2425–2426. [Google Scholar] [CrossRef]
- Stiles, B.W.; Yueh, S.H. Impact of rain on spaceborne Ku-band wind scatterometer data. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1973–1983. [Google Scholar] [CrossRef]
- Tournadre, J.; Quilfen, Y. Impact of rain cell on scatterometer data: 1. Theory and modeling. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef]
- Weissman, D.E.; Bourassa, M.A.; Tongue, J. Effects of rain rate and wind magnitude on SeaWinds scatterometer wind speed errors. J. Atmos. Ocean. Technol. 2002, 19, 738–746. [Google Scholar] [CrossRef]
- Hilburn, K.; Wentz, F.; Smith, D.; Ashcroft, P. Correcting active scatterometer data for the effects of rain using passive radiometer data. J. Appl. Meteorol. Climatol. 2006, 45, 382–398. [Google Scholar] [CrossRef] [Green Version]
- Verspeek, J.; Verhoef, A.; Stoffelen, A. ASCAT-B NWP Ocean Calibration and Validation; OSI SAF Technical Report; EUMETSAT: Darmstadt, Germany, 2013. [Google Scholar]
- Anderson, C.; Figa-Saldana, J.; Wilson, J.J.W.; Ticconi, F. Validation and cross-validation methods for ASCAT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2232–2239. [Google Scholar] [CrossRef]
- Uyeda, H.; Zrnic, D.S. Fine structure of gust fronts obtained from the analysis of single Doppler radar data. J. Meteorol. Soc. Jpn. Ser. II 1988, 66, 869–881. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Portabella, M.; Stoffelen, A.; Vogelzang, J.; Verhoef, A. On mesoscale analysis and ASCAT ambiguity removal. Q. J. R. Meteorol. Soc. 2016, 142, 1745–1756. [Google Scholar] [CrossRef] [Green Version]
- Drager, A.J.; van den Heever, S.C. Characterizing convective cold pools. J. Adv. Model. Earth Syst. 2017, 9, 1091–1115. [Google Scholar] [CrossRef]
- Fuglestvedt, H.F.; Haerter, J.O. Cold pools as conveyor belts of moisture. Geophys. Res. Lett. 2020, 47, e2020GL087319. [Google Scholar] [CrossRef]
- Grodsky, S.A.; Kudryavtsev, V.N.; Bentamy, A.; Carton, J.A.; Chapron, B. Does direct impact of SST on short wind waves matter for scatterometry? Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Stoffelen, A.; Zhao, C.; Vogelzang, J.; Verhoef, A.; Verspeek, J.; Lin, M.; Chen, G. An SST-dependent Ku-band geophysical model function for Rapid Scat. J. Geophys. Res. Ocean. 2017, 122, 3461–3480. [Google Scholar] [CrossRef]
- Xu, X.; Stoffelen, A. Improved Rain Screening for Ku-Band Wind Scatterometry. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2494–2503. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, J.; Lin, M.; Zhang, Y.; Chang, Y. Evaluating Chinese HY-2B HSCAT ocean wind products using buoys and other scatterometers. IEEE Geosci. Remote Sens. Lett. 2019, 17, 923–927. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zou, J.; Lin, W.; Verhoef, A.; Zhang, Y.; He, Y.; Lin, M. Validation of new sea surface wind products from Scatterometers Onboard the HY-2B and MetOp-C satellites. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4387–4394. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Priftis, G.; Lang, T.J.; Garg, P.; Nesbitt, S.W.; Lindsley, R.D.; Chronis, T. Evaluating the Detection of Mesoscale Outflow Boundaries Using Scatterometer Winds at Different Spatial Resolutions. Remote Sens. 2021, 13, 1334. https://doi.org/10.3390/rs13071334
Priftis G, Lang TJ, Garg P, Nesbitt SW, Lindsley RD, Chronis T. Evaluating the Detection of Mesoscale Outflow Boundaries Using Scatterometer Winds at Different Spatial Resolutions. Remote Sensing. 2021; 13(7):1334. https://doi.org/10.3390/rs13071334
Chicago/Turabian StylePriftis, Georgios, Timothy J. Lang, Piyush Garg, Stephen W. Nesbitt, Richard D. Lindsley, and Themistoklis Chronis. 2021. "Evaluating the Detection of Mesoscale Outflow Boundaries Using Scatterometer Winds at Different Spatial Resolutions" Remote Sensing 13, no. 7: 1334. https://doi.org/10.3390/rs13071334
APA StylePriftis, G., Lang, T. J., Garg, P., Nesbitt, S. W., Lindsley, R. D., & Chronis, T. (2021). Evaluating the Detection of Mesoscale Outflow Boundaries Using Scatterometer Winds at Different Spatial Resolutions. Remote Sensing, 13(7), 1334. https://doi.org/10.3390/rs13071334