
Field Information Modeling (FIM)™: Best Practices Using Point Clouds


Abstract
1. Field Information Modeling (FIM)™
1.1. FIM and Point Clouds
- Elemental classification of the design information model (Figure 1c), which is the process of labeling and detecting every element within the designed model based on criteria such as functional type and surface geometry. The surface geometry information related to the element type already exists within BIM and the industry foundation class (IFC) models [4,5] and, if available, can be used directly. In other cases, particularly when only 3D CAD models exist, the STereoLithography (STL) file format can be deployed, which approximates CAD object surfaces with triangular planes [20]. To further group triangular planes of the same surface together, a mesh segmentation process can be deployed, such as that proposed in [21,22,23]. The output of this stage is presented visually in Figure 1c, where each element is separated and shown with a unique color.
- Superimposition of the point cloud and the classified model (Figure 1d), which involves the registration of the coordinate systems of the point cloud and the model. To perform point-cloud-to-model registration, at least three non-colinear point correspondences between the model and the point cloud are necessary [24]. In the presence of a construction error, which is a reasonable assumption, given the statistics related to rework due to poor construction [25], it is recommended that we use identifiable and signalized targets on pre-surveyed site control points to perform the registration [16,26]. In cases where construction errors are less prominent, iterative closest point (ICP) registration of the point cloud and the closest surfaces on the model can be performed through methods such as the scan vs. BIM proposed in [20].
- Point-cloud-to-model comparison and assignment, which is used to aid with the assignment of the point cloud to the model elements. In the case of negligible construction errors, the distance of the point to the closest element can be used to determine correspondence, which is the metric used in the scan vs. BIM of [20]. A distance threshold must then be deployed to reject far points. Figure 1e shows an example of a heatmap used to visualize the distance of the points to the closest classified elements. Figure 1f presents the resulting point-cloud-to-element assignment with an arbitrarily defined distance threshold of 50 mm. In other cases, where possible local construction errors exist (e.g., a set of elements are incorrectly constructed or assembled), the correct assignment may require the use of additional information, such as point neighborhood behavior [26], curvature [27], color [28], or intensity [29].
1.2. Study Objectives, Scope, and Structure
- Section 2 describes the spatial uncertainty of point clouds and the necessity to incorporate this spatial uncertainty within a successful point cloud processing framework.
- Section 3 introduces point cloud processing when construction errors can be considered negligible. A new process for a point cloud vs. BIM is proposed, along with a demonstration of its effectiveness on real-world point clouds.
- Section 4 reveals the basic considerations for analysis of point clouds when the impact of construction errors cannot be neglected. New methods for point cloud neighborhood definition, surface-hypothesis-based classification, and surface segmentation, along with demonstrated real-world examples, are thoroughly discussed.
- Section 5 summarizes the findings and provides avenues for further explorations.
2. Point Cloud Spatial Uncertainty
2.1. Assumptions of Input Parameters
- The n-D designed information model is available, accurate and up-to-date with the latest change orders.
- It is expected that stages 1 and 2 of the typical point cloud processing, corresponding to Figure 1a–d, are reliably completed. This means that a point cloud from the field is acquired, the instrument by which the point cloud was collected is known, the elemental classification of the n-D designed information model is carried out, and an initial target-based registration of the point cloud and the model is performed.
- The point cloud instrument is assumed to be calibrated, containing no (or negligible) systematic error trends.
- The spatial uncertainty of each point is modeled, and the error ellipsoid as per Equation (1) is constructed for each point.
3. Point Cloud Analysis: Case of Negligible Construction Errors
3.1. A New Generic Process for Point Cloud vs. Model
| Algorithm 1 Point Cloud vs. Model |
|
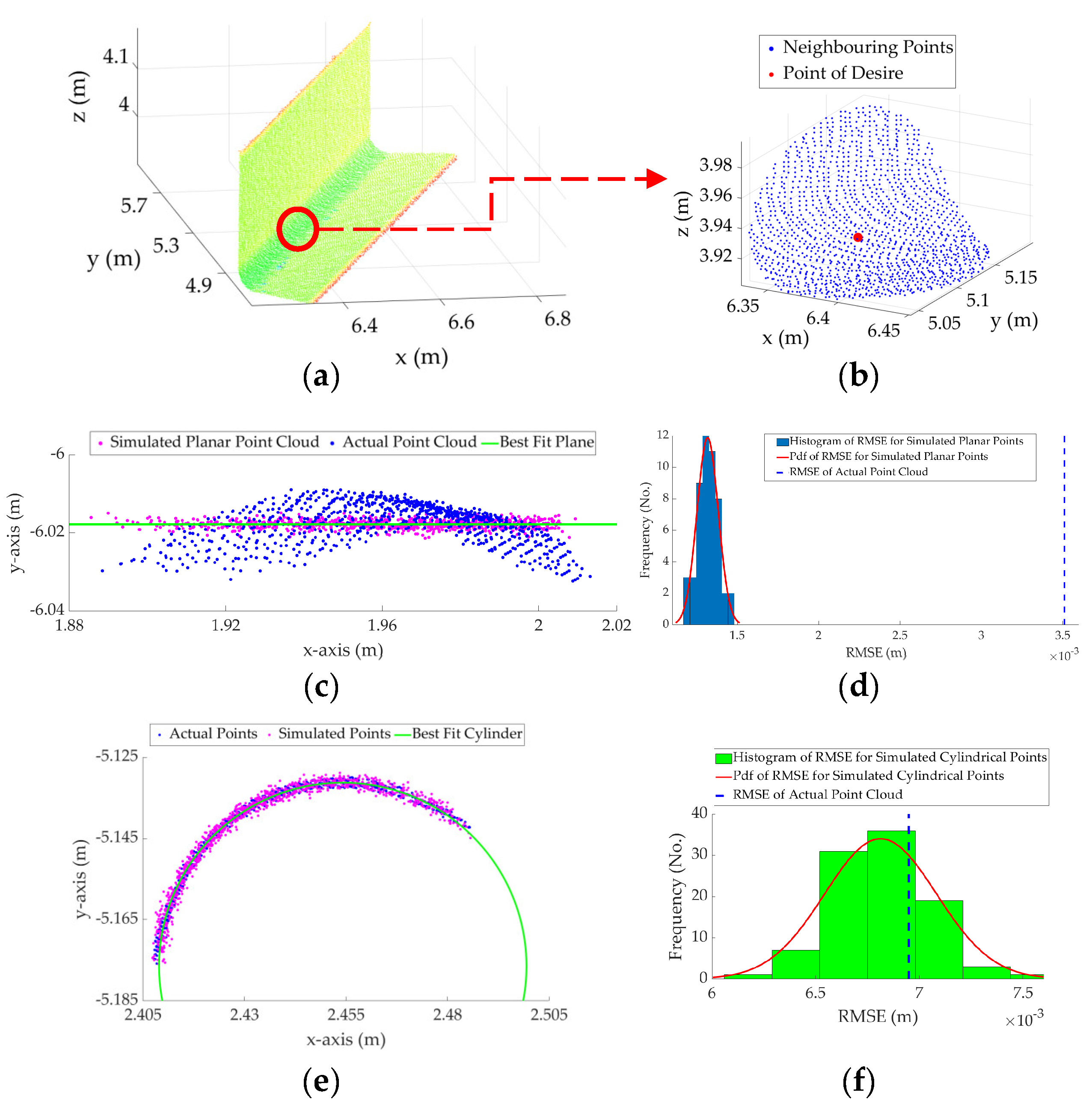
- Its error ellipsoid intersects the surface. This is schematically shown in Figure 3a,b for planar and cylindrical surfaces, respectively. The intersection of ellipsoids and common surfaces such as planes, cylinders, spheres, and ellipsoids will be covered in Appendix A.
- The point follows the pattern of the assigned surface (an inlier point). The algorithm for detecting inlier points, given a particular model, will be discussed in Appendix B.
3.2. Demonstration 1: Comparison of Scan vs. BIM and Point Cloud vs. Model
3.2.1. Experimental Setup
- The point cloud of the sample column was subjected to a rigid body transformation (translation and rotation; Figure 4b).
- The original point cloud was then superimposed onto the as-built model of the transformed point cloud for comparison (Figure 4e).
- The proposed point cloud vs. model was compared to the scan vs. BIM method. The scan vs. BIM method was performed using four distance configurations with changing from 50 mm to 125 mm in 25 mm increments.
3.2.2. Results: Registration Error Comparison
3.2.3. Results: Quality of Point-to-Surface Assignment
3.3. Constraint for Negligible Construction Error
- Distance metric: Since the distance threshold is the basis for the assignment or rejection of a point to an element, without a priori knowledge of the construction errors, the threshold will be a guess at best. The impact of the subjective definition of (introduced in the previous section), even for the case without construction errors, was thoroughly discussed in Section 3.2.
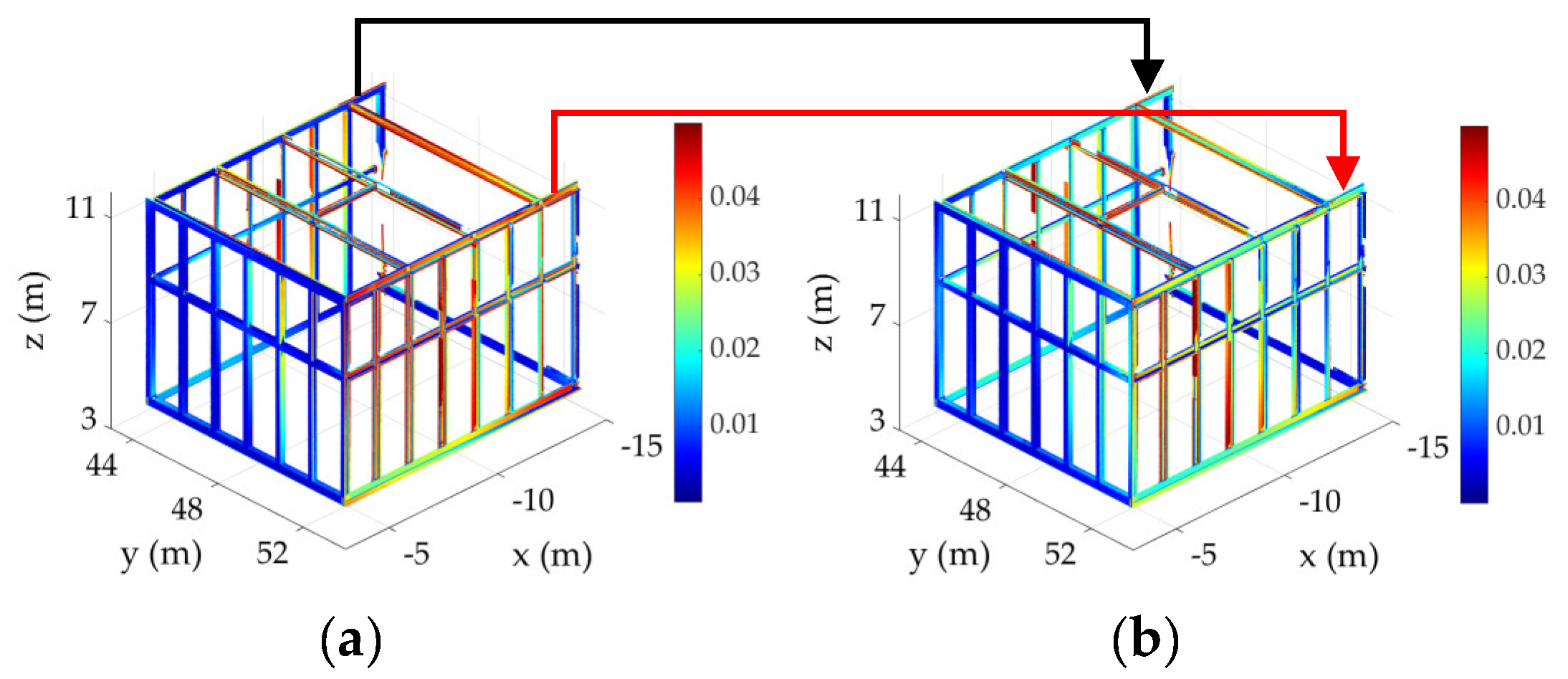
- Iterative registration: Since iterative ICP registration is performed on all elements, those elements with additional construction errors might also be used within the least-squares registration. Similar to any least-squares adjustment in the presence of outliers [55], the outlying elements due to construction errors will negatively impact the overall registration quality. An example of this phenomenon for scan vs. BIM is provided in Figure 7. In this example, even though the overall registration RMSE improved from 21 mm in Figure 7a to 18 mm in Figure 7b, the registration process, for example, sacrificed the accuracy of the element, shown with the black arrow, to accommodate the element, shown in red. However, Figure 7a represents the correct point-to-model distance, and hence, the element, shown in red, must not be allowed to influence the registration. It is possible to solve this problem by adopting a local registration and matching strategy, which will be treated in Section 4.
4. Point Cloud Analysis: Existence of Construction Errors
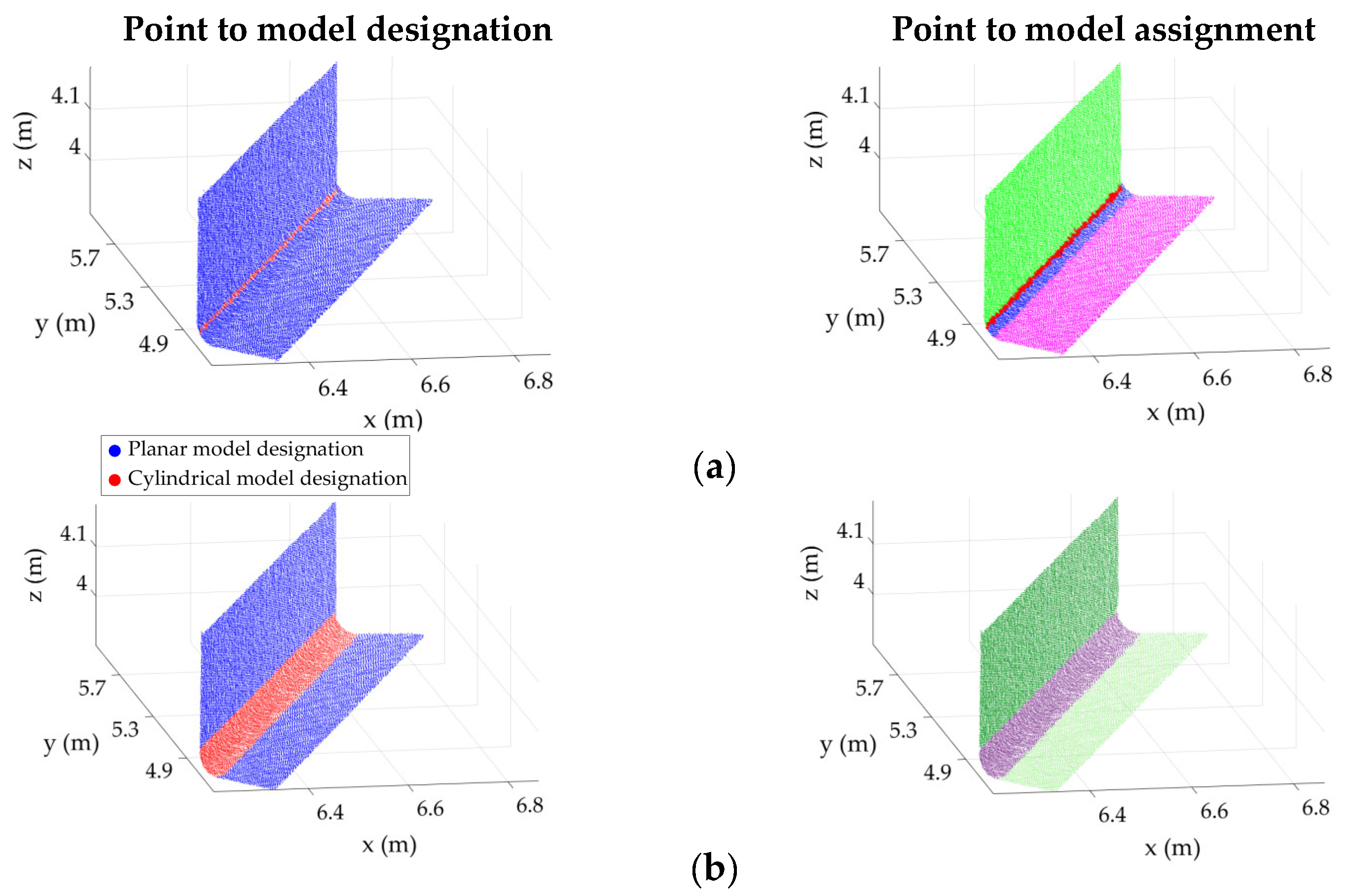
- Local point-cloud-to-model hypothesis testing, which aims at finding the points that locally follow the pattern of the element’s geometry.
4.1. Local Point-Cloud-to-Model Hypothesis Testing
| Algorithm 2 Point-Cloud-to-Model Hypothesis Testing | |
|
4.2. Robust Neighborhood Definition
| Algorithm 3 Robust Neighborhood Definition | |
| |
| |
|
4.3. Demonstration 2: Evaluation of the Point-to-Model Quality
4.3.1. Robust Neighborhood Evaluation
4.3.2. Impact of Monte Carlo Iteration
4.3.3. Impact of Neighborhood Size
4.3.4. Comparison with RANSAC
4.4. Demonstration 3: Comparison with Local Scan vs. BIM
5. Discussion on the Summary of Findings
- Existence (or speculation) of construction errors, which discussed the approaches taken by Verity [31], entropy-based local point neighborhood definition [32,33], and RANSAC shape detection [34] from existing studies, and the newly proposed Algorithms 2 and 3 for point-cloud-to-model hypothesis testing.
6. Concluding Remarks and Avenues for Future Exploration
- Automated spatial uncertainty estimation: Currently, the proposed frameworks are predicated on the formulation of the error ellipsoid of each point a priori. While this can be accomplished for most instruments, it would still be attractive to formulate this spatial uncertainty automatically and directly from the point cloud.
- Closed formulation of distribution of the RMSE: Algorithm 2 involved simulating multiple sets of points to generate the distribution of the RMSE. Formulating this RMSE in closed form will remove the requirement for simulating the multiple sets of points, which, depending on the formulation, might improve computational efficiency.
- Point cloud assignment in the presence of damages: This study focused on errors during construction, including orientational, positional, and dimensional errors of a particular element. Automatic assignment of points to damaged elements, such as cracks and deformations, will be an interesting avenue for further exploration.
- Point cloud registration comparison: A comparison of the point cloud registration method proposed in Algorithm 1 with supervised learning methods such as that proposed in [65] could be of interest to some researchers.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Intersection of Error Ellipsoids with Common Surfaces
- Ellipsoid–plane intersection: This problem was treated in [16], Algorithm 5. First, the error ellipsoid is converted into a sphere with radius unity through the affine transformation, presented in Algorithm 5, step 3 of [16]. The planar surface is subjected to the same affine transformation. If the distance of the center of the unit sphere to the transformed plane is less than or equal to unity, the plane and ellipsoid have an intersection.
- Ellipsoid–cylinder intersection: This problem was treated in [16], Algorithm 6. First, the cylinder and the ellipsoid are rotated such that the cylinder’s axis is parallel to the z axis. The problem is now reduced to checking the following two intersections in 2D: (i) ellipse and circle intersection in the x-y plane and (ii) ellipse and rectangle intersection in the x-z (or y-z) plane. The first, ellipse and circle intersection, can be solved by calculating the distance of the center of the circle to the ellipse using the method of Chernov [66]. If the distance is smaller than the radius of the circle (original cylinder), the two curves intersect. The second, ellipse and rectangle intersection, can be solved using the method of Eberly [67].
- Ellipsoid–ellipsoid intersection: Wang [68] proposed an elegant algebraic condition for the intersection of two ellipsoids (extendable to spheres as well). It was shown that two ellipsoids are separated if and only if their characteristic polynomial contains exactly two distinct positive roots. This condition can be used to determine whether the two ellipsoids intersect.
Appendix B. Robust Outlier Detection
| Algorithm A1 Robust Outlier Detection Given Parametric Surface Model. | |
| |
|
References
- Fu, C.; Aouad, G.; Lee, A.; Mashall-Ponting, A.; Wu, S. IFC model viewer to support nD model application. Autom. Constr. 2006, 15, 178–185. [Google Scholar] [CrossRef]
- Ding, L.; Zhou, Y.; Akinci, B. Building Information Modeling (BIM) application framework: The process of expanding from 3D to computable nD. Autom. Constr. 2014, 46, 82–93. [Google Scholar] [CrossRef]
- Jung, Y.; Joo, M. Building information modelling (BIM) framework for practical implementation. Autom. Constr. 2011, 20, 126–133. [Google Scholar] [CrossRef]
- Autodesk. AUTODESK Revit IFC Manual: Detailed Instructions for Handling IFC Files; Autodesk: San Rafael, CA, USA, 2018. [Google Scholar]
- BuildingSMART. IFC Standard. Available online: https://standards.buildingsmart.org/IFC/RELEASE/IFC4/ADD1/HTML/schema/ifcgeometricmodelresource/lexical/ifcfacebasedsurfacemodel.htm (accessed on 6 February 2021).
- Koo, B.; Fischer, M. Feasibility Study of 4D CAD in Commercial Construction. J. Constr. Eng. Manag. 2000, 126, 251–260. [Google Scholar] [CrossRef]
- Lee, X.S.; Tsong, C.W.; Khamidi, M.F. 5D Building Information Modelling—A Practicability Review. In Proceedings of the MATEC Web of Conferences EDP Sciences, Amsterdam, The Netherlands, 23–25 March 2016; Volume 66, p. 00026. [Google Scholar]
- Kang, J.; Ganapathi, A.; Lee, J.; Faghihi, V. Robotic total station and BIM for quality control. In eWork and eBusiness in Architecture, Engineering and Construction, Proceedings of the European Conference on Product and Process Modelling (ECPPM), Reykjavik, Iceland, 25–27 July 2012; Taylor & Francis Group: London, UK, 2012. [Google Scholar]
- Chi, H.L.; Kang, S.C.; Wang, X. Research trends and opportunities of augmented reality applications in architecture, engineering, and construction. Autom. Constr. 2013. [Google Scholar] [CrossRef]
- Ruwanpura, J.Y.; Hewage, K.N.; Silva, L.P. Evolution of the i-Booth© onsite information management kiosk. Autom. Constr. 2012. [Google Scholar] [CrossRef]
- Tay, Y.W.D.; Panda, B.; Paul, S.C.; Noor Mohamed, N.A.; Tan, M.J.; Leong, K.F. 3D printing trends in building and construction industry: A review. Virtual Phys. Prototyp. 2017, 12, 261–276. [Google Scholar] [CrossRef]
- Petersen, P.B. Total quality management and the Deming approach to quality management. J. Manag. Hist. 1999. [Google Scholar] [CrossRef]
- Netland, T.H. The Routledge Companion to Lean Management; Routledge: Abingdon, UK, 2016; ISBN 9781315686899. [Google Scholar]
- Last Planner®. Handbook for Construction Planning and Scheduling; Baldwin, A., Bordoli, D., Eds.; Wiley: Hoboken, NJ, USA, 2014; ISBN 9781118838167. [Google Scholar]
- Novinsky, M.; Nesensohn, C.; Ihwas, N.; Haghsheno, S. Combined Application of Earned Value Management and Last Planner System in Construction Projects. In Proceedings of the 26th Annual Conference of the International Group for Lean Construction (IGLC), Chennai, India, 16–22 July 2018; pp. 775–785. [Google Scholar]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic Recognition of Common Structural Elements from Point Clouds for Automated Progress Monitoring and Dimensional Quality Control in Reinforced Concrete Construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Automated Progress Monitoring Using Unordered Daily Construction Photographs and IFC-Based Building Information Models. J. Comput. Civ. Eng. 2015, 29, 04014025. [Google Scholar] [CrossRef]
- Rausch, C.; Haas, C. Automated shape and pose updating of building information model elements from 3D point clouds. Autom. Constr. 2021, 124, 103561. [Google Scholar] [CrossRef]
- Boje, C.; Guerriero, A.; Kubicki, S.; Rezgui, Y. Towards a semantic Construction Digital Twin: Directions for future research. Autom. Constr. 2020, 114, 103179. [Google Scholar] [CrossRef]
- Bosché, F. Automated recognition of 3D CAD model objects in laser scans and calculation of as-built dimensions for dimensional compliance control in construction. Adv. Eng. Inform. 2010, 24, 107–118. [Google Scholar] [CrossRef]
- Yan, D.-M.; Wang, W.; Liu, Y.; Yang, Z. Variational mesh segmentation via quadric surface fitting. Comput. Des. 2012, 44, 1072–1082. [Google Scholar] [CrossRef]
- Wang, J.; Yu, Z. Surface feature based mesh segmentation. Comput. Graph. 2011, 35, 661–667. [Google Scholar] [CrossRef]
- Wang, H.; Lu, T.; Au, O.K.-C.; Tai, C.-L. Spectral 3D mesh segmentation with a novel single segmentation field. Graph. Model. 2014, 76, 440–456. [Google Scholar] [CrossRef]
- Horn, B.K.P.; Hilden, H.M.; Negahdaripour, S. Closed-form solution of absolute orientation using orthonormal matrices. J. Opt. Soc. Am. A 1988, 5, 1127–1135. [Google Scholar] [CrossRef]
- Hwang, B.-G.; Thomas, S.R.; Haas, C.T.; Caldas, C.H. Measuring the Impact of Rework on Construction Cost Performance. J. Constr. Eng. Manag. 2009, 135, 187–198. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Walker, R.; Bhavnani, A.; Ruwanpura, J.Y. Extraction of pipes and flanges from point clouds for automated verification of pre-fabricated modules in oil and gas refinery projects. Autom. Constr. 2019, 103, 150–167. [Google Scholar] [CrossRef]
- Czerniawski, T.; Nahangi, M.; Haas, C.; Walbridge, S. Pipe spool recognition in cluttered point clouds using a curvature-based shape descriptor. Autom. Constr. 2016, 71, 346–358. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Hwang, N.; Kim, C.; Kang, Y. Classification of major construction materials in construction environments using ensemble classifiers. Adv. Eng. Inform. 2014, 28, 1–10. [Google Scholar] [CrossRef]
- Wang, Q.; Cheng, J.C.P.; Sohn, H. Automated Estimation of Reinforced Precast Concrete Rebar Positions Using Colored Laser Scan Data. Comput. Civ. Infrastruct. Eng. 2017, 32, 787–802. [Google Scholar] [CrossRef]
- Reconstruct. A Visual Command Center. Available online: https://www.reconstructinc.com (accessed on 12 October 2020).
- Verity—Construction Verification Software. ClearEdge3D. Available online: https://www.clearedge3d.com/products/verity/ (accessed on 12 October 2020).
- Weinmann, M.; Jutzi, B.; Hinz, S.; Mallet, C. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers. ISPRS J. Photogramm. Remote Sens. 2015, 105, 286–304. [Google Scholar] [CrossRef]
- Demantké, J.; Mallet, C.; David, N.; Vallet, B. Dimensionality Based Scale Selection in 3D Lidar Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 97–102. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Rebolj, D.; Pučko, Z.; Babič, N.Č.; Bizjak, M.; Mongus, D. Point cloud quality requirements for Scan-vs-BIM based automated construction progress monitoring. Autom. Constr. 2017, 84, 323–334. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Robust Segmentation of Planar and Linear Features of Terrestrial Laser Scanner Point Clouds Acquired from Construction Sites. Sensors 2018, 18, 819. [Google Scholar] [CrossRef]
- Macher, H.; Landes, T.; Grussenmeyer, P. From Point Clouds to Building Information Models: 3D Semi-Automatic Reconstruction of Indoors of Existing Buildings. Appl. Sci. 2017, 7, 1030. [Google Scholar] [CrossRef]
- Zhengchun, D.; Zhaoyong, W.; Jianguo, Y. Point cloud uncertainty analysis for laser radar measurement system based on error ellipsoid model. Opt. Lasers Eng. 2016, 79, 78–84. [Google Scholar] [CrossRef]
- Du, Z.; Wu, Z.; Yang, J. Error Ellipsoid Analysis for the Diameter Measurement of Cylindroid Components Using a Laser Radar Measurement System. Sensors 2016, 16, 714. [Google Scholar] [CrossRef] [PubMed]
- Ku, H. Notes on the use of propagation of error formulas. J. Res. Natl. Bur. Stand. Sect. C Eng. Instrum. 1966, 70, 263. [Google Scholar] [CrossRef]
- Mourikis, A.I.; Roumeliotis, S.I. Analysis of positioning uncertainty in simultaneous localization and mapping (SLAM). In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat No 04CH37566) IROS-04, Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Beder, C.; Steffen, R. Determining an Initial Image Pair for Fixing the Scale of a 3D Reconstruction from an Image Sequence. Comput. Vis. 2006, 4174, 657–666. [Google Scholar] [CrossRef]
- Leica Geosystems. Leica HDS6100 Latest Generation of Ultra-High Speed Laser Scanner. Available online: https://w3.leica-geosystems.com/downloads123/hds/hds/hds6100/brochures/leica_hds6100_brochure_us.pdf (accessed on 20 February 2021).
- Leica Geosystems. Leica BLK2GO—Handheld Imaging Laser Scanner. Available online: https://shop.leica-geosystems.com/de/learn/reality-capture/blk2go (accessed on 20 February 2021).
- GOLDBECK GmbH. Available online: https://www.goldbeck.de/startseite/ (accessed on 11 December 2020).
- Schönberger, J.L. Robust Methods for Accurate and Efficient 3D Modeling from Unstructured Imagery. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2018. [Google Scholar]
- Han, K.K.; Golparvar-Fard, M. Potential of big visual data and building information modeling for construction performance analytics: An exploratory study. Autom. Constr. 2017, 73, 184–198. [Google Scholar] [CrossRef]
- Vock, R.; Dieckmann, A.; Ochmann, S.; Klein, R. Fast template matching and pose estimation in 3D point clouds. Comput. Graph. 2019, 79, 36–45. [Google Scholar] [CrossRef]
- Brunelli, R. Template Matching Techniques in Computer Vision; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Park, S.-Y.; Subbarao, M. A fast point-to-tangent plane technique for multi-view registration. In Proceedings of the 4th International Conference on 3-D Digital Imaging and Modeling, Banff, AB, Canada, 6–10 October 2003; p. 3. [Google Scholar]
- Khoshelham, K. Closed-form solutions for estimating a rigid motion from plane correspondences extracted from point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 114, 78–91. [Google Scholar] [CrossRef]
- Moritani, R.; Kanai, S.; Date, H.; Watanabe, M.; Nakano, T.; Yamauchi, Y. Cylinder-based simultaneous registration and model fitting of laser-scanned point clouds for accurate as-built modeling of piping system. Comput. Des. Appl. 2018, 15, 720–733. [Google Scholar] [CrossRef]
- FARO AS-BUILTTM Modeler. Available online: https://www.faro.com/en-gb/products/construction-bim-cim/faro-as-built/as-built-modeler (accessed on 9 February 2021).
- Olson, D.L.; Delen, D. Advanced Data Mining Techniques. In Advanced Data Mining Techniques; Olson, D.L., Delen, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Rousseeuw, P.J. Tutorial to robust statistics. J. Chemom. 1991, 5, 1–20. [Google Scholar] [CrossRef]
- Nurunnabi, A.; Sadahiro, Y.; Laefer, D.F. Robust statistical approaches for circle fitting in laser scanning three-dimensional point cloud data. Pattern Recognit. 2018, 81, 417–431. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Klouda, K. An exact polynomial time algorithm for computing the least trimmed squares estimate. Comput. Stat. Data Anal. 2015, 84, 27–40. [Google Scholar] [CrossRef]
- Kass, R.E.; Raftery, A.E. Bayes Factors. J. Am. Stat. Assoc. 1995, 90, 773–795. [Google Scholar] [CrossRef]
- Wirtz, T.; Guhr, T. Distribution of the Smallest Eigenvalue in the Correlated Wishart Model. Phys. Rev. Lett. 2013, 111, 094101. [Google Scholar] [CrossRef] [PubMed]
- Jaynes, E.T. Prior Probabilities. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 227–241. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Leroy, A.M. Robust Regression and Outlier Detection; John Wiley & Sons: Hoboken, NJ, USA, 1987; Volume 42, ISBN 9780471852339. [Google Scholar]
- Cai, T.T.; Liang, T.; Zhou, H.H. Law of log determinant of sample covariance matrix and optimal estimation of differential entropy for high-dimensional Gaussian distributions. J. Multivar. Anal. 2015, 137, 161–172. [Google Scholar] [CrossRef]
- CloudCompare Wiki RANSAC Shape Detection (Plugin). Available online: https://www.cloudcompare.org/doc/wiki/index.php?title=RANSAC_Shape_Detection_(plugin) (accessed on 20 February 2021).
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–21 June 2019; pp. 7156–7165. [Google Scholar]
- Chernov, N.; Wijewickrema, S. Algorithms for projecting points onto conics. J. Comput. Appl. Math. 2013, 251, 8–21. [Google Scholar] [CrossRef]
- Eberly, D. Intersection of Rectangle and Ellipse. Available online: https://www.geometrictools.com/Documentation/IntersectionRectangleEllipse.pdf (accessed on 20 February 2021).
- Wang, W.; Wang, J.; Kim, M.-S. An algebraic condition for the separation of two ellipsoids. Comput. Aided Geom. Des. 2001, 18, 531–539. [Google Scholar] [CrossRef]
- Hampel, F.R. The Influence Curve and its Role in Robust Estimation. J. Am. Stat. Assoc. 1974, 69, 383–393. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Precision | Recall | Accuracy | F-Measure |
|---|---|---|---|---|
| Scan vs. BIM −5 mm | 87.9% | 76.9% | 69.7% | 82.1% |
| Scan vs BIM −75 mm | 98.8% | 87.5% | 86.6% | 92.8% |
| Scan vs. BIM −100 mm | 100.0% | 87.5% | 87.5% | 93.3% |
| Scan vs. BIM −125 mm | 100.0% | 86.8% | 86.8% | 92.9% |
| Proposed point cloud vs. BIM | 98.8% | 99.9% | 98.7% | 99.3% |
| Method | Precision | Recall | Accuracy | F-Measure |
|---|---|---|---|---|
| RANSAC CloudCompare | 94.7% | 83.9% | 81.3% | 89.0% |
| Proposed point-to-model assignment | 97.7% | 99.0% | 97.4% | 98.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maalek, R. Field Information Modeling (FIM)™: Best Practices Using Point Clouds. Remote Sens. 2021, 13, 967. https://doi.org/10.3390/rs13050967
Maalek R. Field Information Modeling (FIM)™: Best Practices Using Point Clouds. Remote Sensing. 2021; 13(5):967. https://doi.org/10.3390/rs13050967
Chicago/Turabian StyleMaalek, Reza. 2021. "Field Information Modeling (FIM)™: Best Practices Using Point Clouds" Remote Sensing 13, no. 5: 967. https://doi.org/10.3390/rs13050967
APA StyleMaalek, R. (2021). Field Information Modeling (FIM)™: Best Practices Using Point Clouds. Remote Sensing, 13(5), 967. https://doi.org/10.3390/rs13050967