
Retrieval of Daytime Total Column Water Vapour from OLCI Measurements over Land Surfaces


Abstract
1. Introduction
2. Data and Methodology
2.1. OLCI
- An increase in the number of spectral bands from 15 to 21;
- Improved signal-to-noise-ratio (SNR) and a 14-bit analogue to digital converter;
- Improved long-term radiometric stability;
- Mitigation of sun-glint contamination by tilting cameras in westerly direction by 12.6°;
- Complete coverage over both land and ocean at 300 m Full-Resolution (FR);
- Improved instrument characterisation including stray-light, camera overlap, and calibration diffusers;
- Pixel specific spectral characterisation (central wavelength, bandwidth, solar irradiance).
2.1.1. L1 and L2 Data
2.1.2. L2 Standard TCWV Product
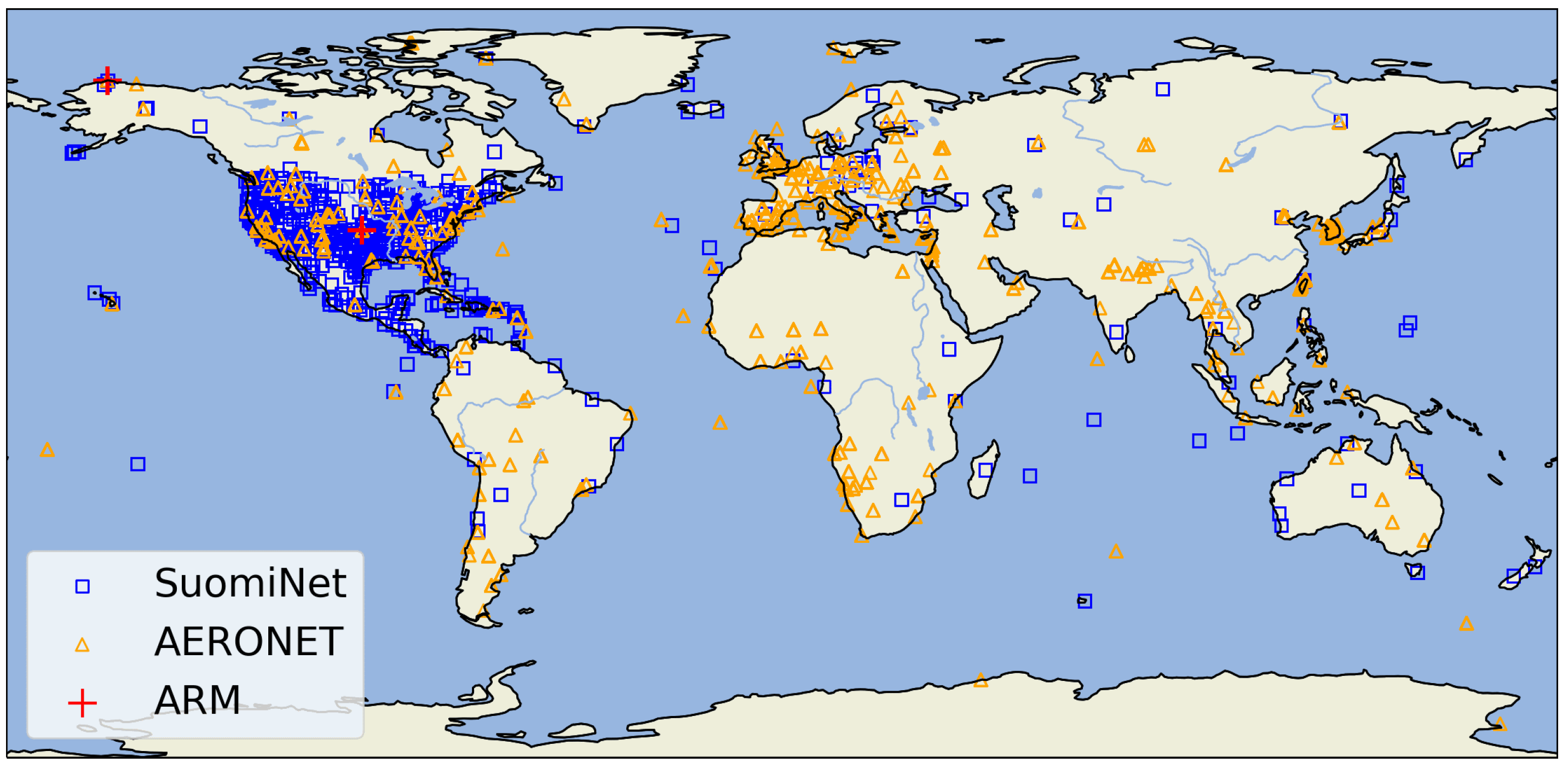
2.2. Reference TCWV Data Sets
2.2.1. ARM
2.2.2. AERONET
2.2.3. U.S. SuomiNet
2.2.4. German GNSS Network
2.3. Retrieval Method
2.3.1. Physical Background
- Solar radiation is available, limiting the retrieval to daytime measurements
- The band measuring the absorption is located in a sensitive part of the spectrum but not saturated.
- The surface brightness in the absorption band can be estimated.
- The lower troposphere, holding the main part of the TCWV, is not masked by clouds or optically thick aerosol layers.
2.3.2. Forward Model
- Aerosol type (continental or maritime aerosol);
- Aerosol scale height (1500 m);
- Profile of temperature and humidity;
- Aerosol optical depth (above land only, from climatology);
- Central wavelength of the absorption bands (see Section 3.3).
2.3.3. Correction of Simulated Water Vapour Absorption
2.3.4. OLCI-A/B Camera Dependent Spectral Shifts
2.3.5. Inversion Technique
2.3.6. Uncertainty Estimates
- Measurement uncertainty (SNR)
- Uncertainty of the aerosol optical depth (assumed to be 0.1)
- Uncertainty of the surface pressure and temperature (assumed to be 5 K and 5 hPa).
3. Results
3.1. Validation on Global Scale
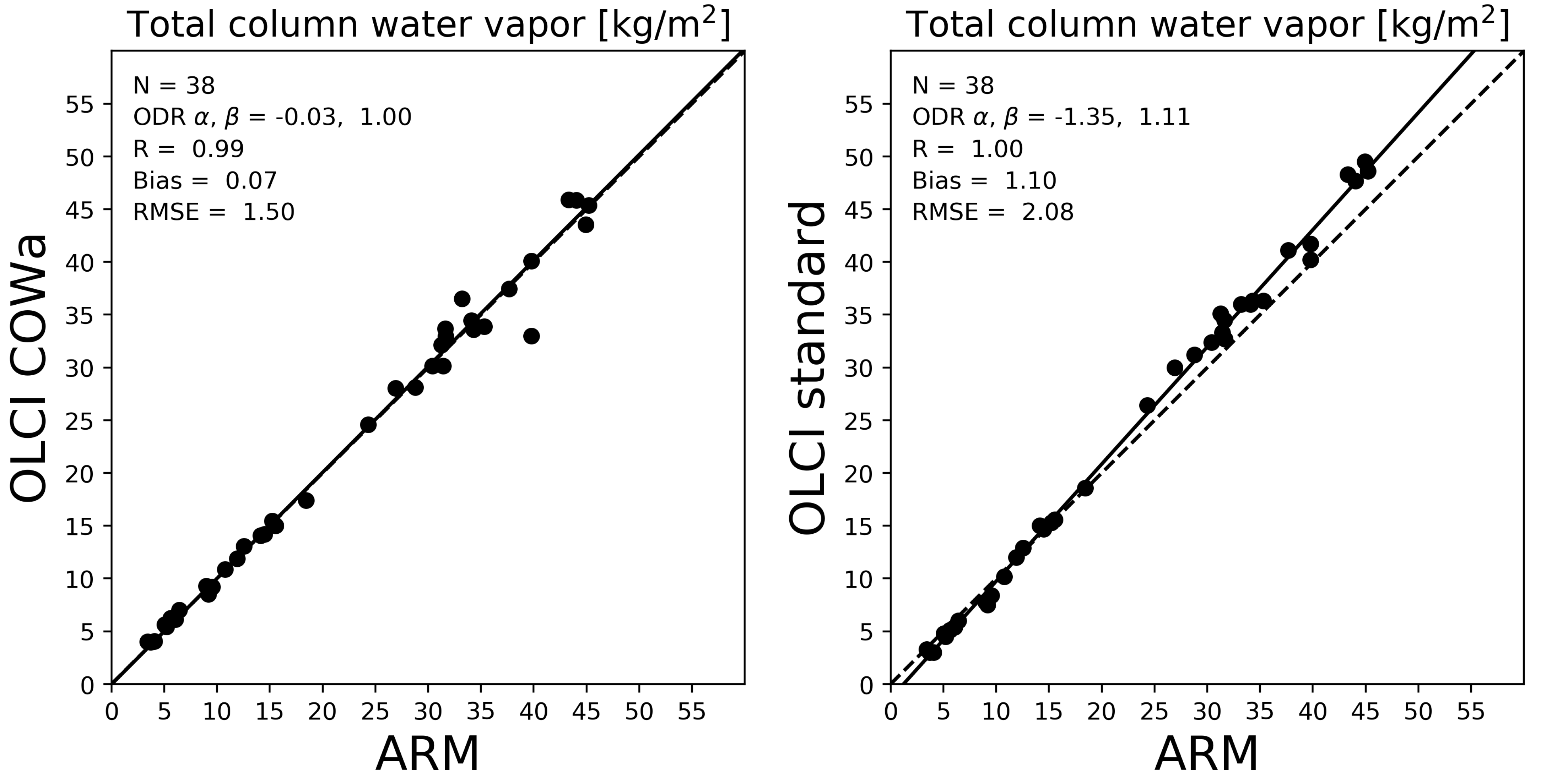
3.1.1. ARM
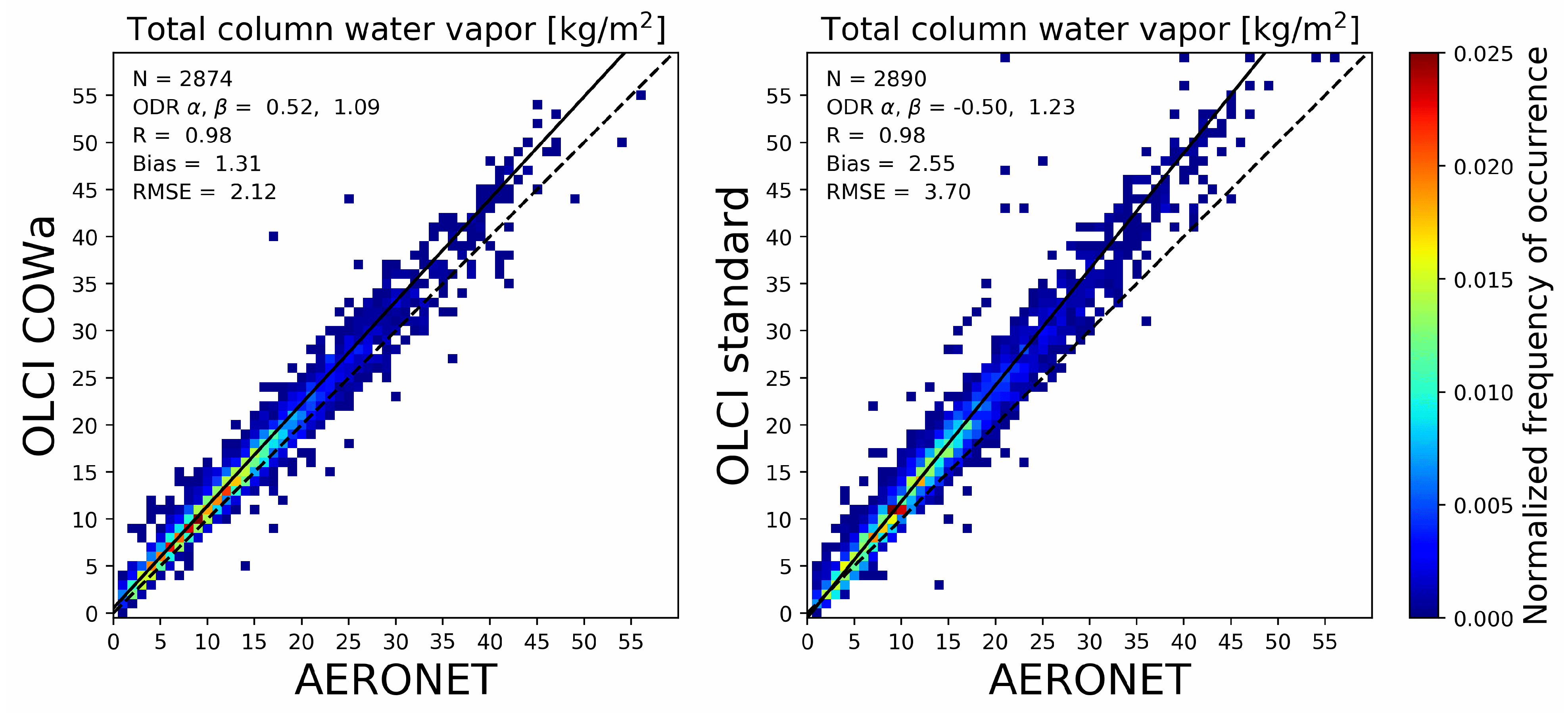
3.1.2. AERONET
3.1.3. SuomiNet
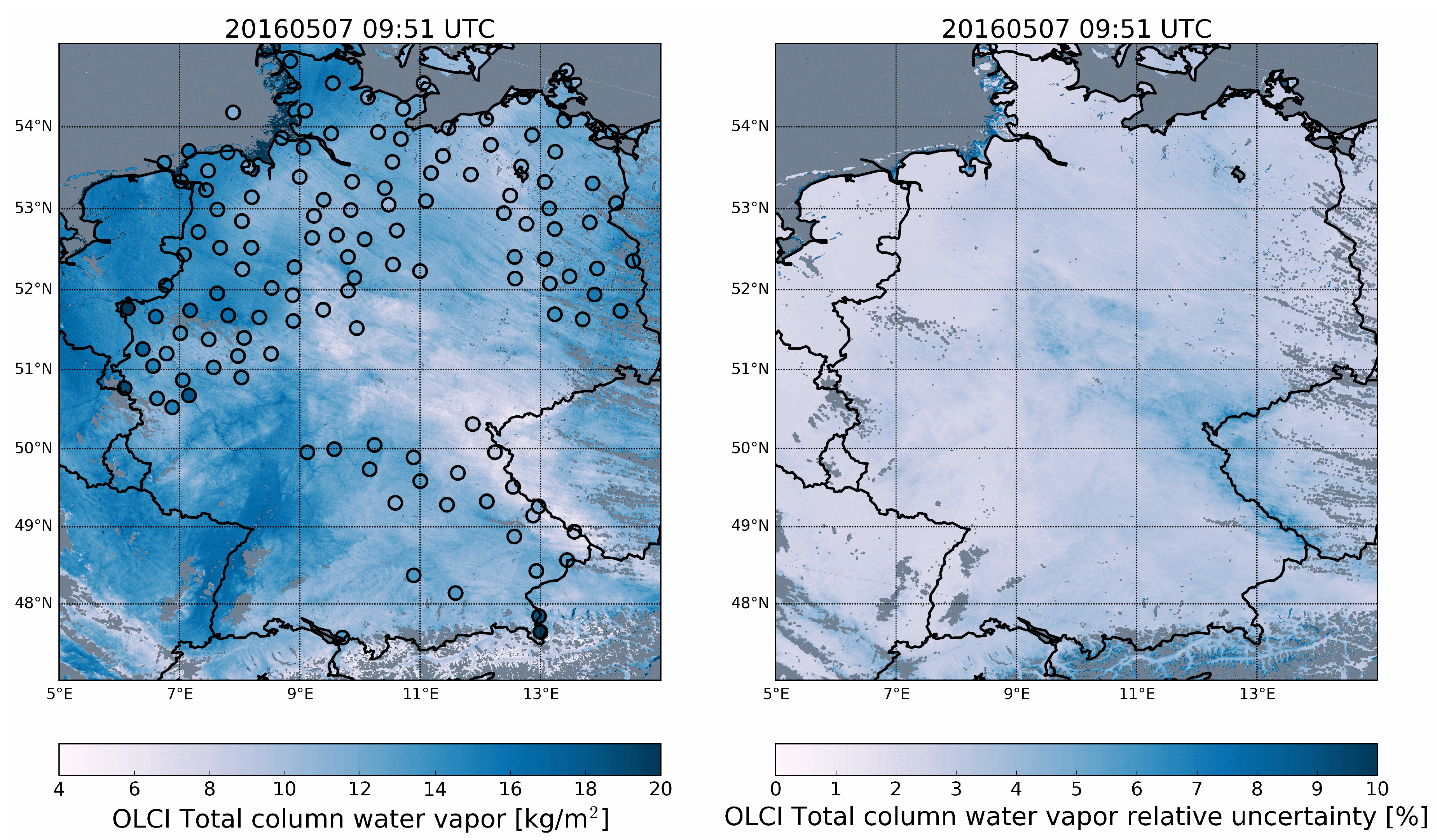
3.2. Validation in German Domain
3.3. A First Evaluation of Pixel-Based TCWV Uncertainty Estimates
4. Discussion
5. Conclusions
- exploitation of the extended spectral capabilities;
- improvement in the inversion scheme by introducing a complete optimal estimation scheme including linear error characterisation;
- set-up designed for flexible forward operator use and application to similar types of observations, certainly from OLCI on future Sentinel-3 satellites, but also, e.g., from future Flexible Combined Imager (FCI) on Meteosat Third Generation (MTG; [67]) and METimage on Metop - Second Generation (Metop-SG; [68]).
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 1D-Var | 1-Dimensional Variational |
| AERONET | Aerosol Robotic Network |
| ARM | Atmospheric Radiation Measurement |
| COWa | Improvement in Copernicus Sentinel-3 OLCI Water Vapour Product |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| EUMETSAT | European Organisation for the Exploitation of Meteorological Satellites |
| FUB | Freie Universität Berlin |
| GCOS | Global Climate Observing System |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| L1/L2 | Level 1/Level 2 |
| LBL | Line-by-line |
| LUT | Look-up Table |
| MERIS | Medium Resolution Imaging Spectrometer Instrument |
| MOMO | Matrix Operator Model |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| MSG/MTG | Meteosat Second/Third Generation |
| MWR | Microwave Radiometer |
| NIR | Near Infrared |
| ODR | Orthogonal Distance Regression |
| OE | Optimal Estimation |
| OLCI | Ocean and Land Colour Instrument |
| RMSE | Root Mean Square Error |
| RTTOV | Radiative Transfer for TOVS (TIROS Operational Vertical Sounder) |
| SEVIRI | Spinning Enhanced Visible and Infrared Imager |
| SNR | Signal-to-noise-ratio |
| STD | Standard Deviation |
| TCWV | Total Column Water Vapour |
References
- Bengtsson, L. The global atmospheric water cycle. Environ. Res. Lett. 2010, 5, 025202. [Google Scholar] [CrossRef]
- Stevens, B.; Bony, S. Water in the atmosphere. Phys. Today 2013, 66, 29–34. [Google Scholar] [CrossRef]
- Held, I.M.; Soden, B.J. Water vapor feedback and global warming. Annu. Rev. Energy Environ. 2000, 25, 441–475. [Google Scholar] [CrossRef]
- Lacis, A.A.; Schmidt, G.A.; Rind, D.; Ruedy, R.A. Atmospheric CO2: Principal control knob governing Earth’s temperature. Science 2010, 330, 356–359. [Google Scholar] [CrossRef] [PubMed]
- Hegerl, G.C.; Black, E.; Allan, R.P.; Ingram, W.J.; Polson, D.; Trenberth, K.E.; Chadwick, R.S.; Arkin, P.A.; Sarojini, B.B.; Becker, A.; et al. Challenges in quantifying changes in the global water cycle. Bull. Am. Meteorol. Soc. 2019, 100, 1097–1115. [Google Scholar] [CrossRef]
- Weckwerth, T.M.; Parsons, D.B. A review of convection initiation and motivation for IHOP_2002. Mon. Weather Rev. 2006, 134, 5–22. [Google Scholar] [CrossRef]
- Keil, C.; Röpnack, A.; Craig, G.C.; Schumann, U. Sensitivity of quantitative precipitation forecast to height dependent changes in humidity. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Sherwood, S.; Roca, R.; Weckwerth, T.; Andronova, N. Tropospheric water vapor, convection, and climate. Rev. Geophys. 2010, 48. [Google Scholar] [CrossRef]
- Dierer, S.; Arpagaus, M.; Seifert, A.; Avgoustoglou, E.; Dumitrache, R.; Grazzini, F.; Mercogliano, P.; Milelli, M.; Starosta, K. Deficiencies in quantitative precipitation forecasts: Sensitivity studies using the COSMO model. Meteorol. Z. 2009, 18, 631–645. [Google Scholar] [CrossRef]
- Naumann, A.K.; Kiemle, C. The vertical structure and spatial variability of lower-tropospheric water vapor and clouds in the trades. Atmos. Chem. Phys. 2020, 20, 6129–6145. [Google Scholar] [CrossRef]
- Bauer, H.S.; Schwitalla, T.; Wulfmeyer, V.; Bakhshaii, A.; Ehret, U.; Neuper, M.; Caumont, O. Quantitative precipitation estimation based on high-resolution numerical weather prediction and data assimilation with WRF–a performance test. Tellus A Dyn. Meteorol. Oceanogr. 2015, 67, 25047. [Google Scholar] [CrossRef]
- Mugume, I.; Basalirwa, C.; Waiswa, D.; Nsabagwa, M.; Ngailo, T.J.; Reuder, J.; Semujju, M. A Comparative Analysis of the Performance of COSMO and WRF Models in Quantitative Rainfall Prediction. Int. J. Mar. Environ. Sci. 2018, 12, 130–138. [Google Scholar]
- Chahine, M.T. GEWEX: The global energy and water cycle experiment. Eos Trans. Am. Geophys. Union 1992, 73, 9–14. [Google Scholar] [CrossRef]
- Schröder, M.; Lockhoff, M.; Shi, L.; August, T.; Bennartz, R.; Borbas, E.; Brogniez, H.; Calbet, X.; Crewell, S.; Eikenberg, S.; et al. GEWEX water vapor assessment (G-VAP). World Climate Research Programme (WCRP) Publication; WMO: Geneva, Switzerland, 2017. [Google Scholar]
- Schluessel, P.; Emery, W.J. Atmospheric water vapour over oceans from SSM/I measurements. Int. J. Remote Sens. 1990, 11, 753–766. [Google Scholar] [CrossRef]
- Wentz, F.J. A well-calibrated ocean algorithm for special sensor microwave/imager. J. Geophys. Res. Ocean. 1997, 102, 8703–8718. [Google Scholar] [CrossRef]
- Fischer, J. High Resolution Spectroscopy for Remote Sensing of Physical Cloud Properties and Water Vapour; Deepak Publishing: Hampton, VR, USA, 1988. [Google Scholar]
- Gao, B.C.; Goetz, A.F. Column atmospheric water vapor and vegetation liquid water retrievals from airborne imaging spectrometer data. J. Geophys. Res. Atmos. 1990, 95, 3549–3564. [Google Scholar] [CrossRef]
- Bartsch, B.; Bakan, S.; Fischer, J. Passive remote sensing of the atmospheric water vapour content above land surfaces. Adv. Space Res. 1996, 18, 25–28. [Google Scholar] [CrossRef]
- Bennartz, R.; Fischer, J. A modified k-distribution approach applied to narrow band water vapour and oxygen absorption estimates in the near infrared. J. Quant. Spectrosc. Radiat. Transf. 2000, 66, 539–553. [Google Scholar] [CrossRef]
- Albert, P.; Bennartz, R.; Preusker, R.; Leinweber, R.; Fischer, J. Remote sensing of atmospheric water vapor using the moderate resolution imaging spectroradiometer. J. Atmos. Ocean. Technol. 2005, 22, 309–314. [Google Scholar] [CrossRef]
- Lindstrot, R.; Preusker, R.; Diedrich, H.; Doppler, L.; Bennartz, R.; Fischer, J. 1D-Var retrieval of daytime total columnar water vapour from MERIS measurements. Atmos. Meas. Tech. 2012, 5, 631. [Google Scholar] [CrossRef]
- Lindstrot, R.; Stengel, M.; Schröder, M.; Fischer, J.; Preusker, R.; Schneider, N.; Steenbergen, T.; Bojkov, B. A global climatology of total columnar water vapour from SSM/I and MERIS. Earth Syst. Sci. Data 2014, 6, 221–233. [Google Scholar] [CrossRef]
- Diedrich, H.; Preusker, R.; Lindstrot, R.; Fischer, J. Retrieval of daytime total columnar water vapour from MODIS measurements over land surfaces. Atmos. Meas. Tech. 2015, 8, 823–836. [Google Scholar] [CrossRef][Green Version]
- Diedrich, H.; Wittchen, F.; Preusker, R.; Fischer, J. Representativeness of total column water vapour retrievals from instruments on polar orbiting satellites. Atmos. Chem. Phys. 2016, 16, 8331–8339. [Google Scholar] [CrossRef]
- Carbajal Henken, C.; Dirks, L.; Steinke, S.; Diedrich, H.; August, T.; Crewell, S. Assessment of Sampling Effects on Various Satellite-Derived Integrated Water Vapor Datasets Using GPS Measurements in Germany as Reference. Remote Sens. 2020, 12, 1170. [Google Scholar] [CrossRef]
- Carbajal Henken, C.; Diedrich, H.; Preusker, R.; Fischer, J. MERIS full-resolution total column water vapor: Observing horizontal convective rolls. Geophys. Res. Lett. 2015, 42. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Preusker, R.; Fischer, J. Algorithm Theoretical Basis Document—Improvement in Copernicus Sentinel-3 OLCI Water Vapour Product—COWa; Technical Report; EUMETSAT: Dramstadt, Germany, 2020. [Google Scholar]
- Preusker, R.; Fischer, J. Algorithm Product Validation and Evolution Report—Improvement in Copernicus Sentinel-3 OLCI Water Vapour Product—COWa; Technical report; EUMETSAT: Dramstadt, Germany, 2020. [Google Scholar]
- Diedrich, H.; Preusker, R.; Lindstrot, R.; Fischer, J. Quantification of uncertainties of water vapour column retrievals using future instruments. Atmos. Meas. Tech. 2013, 6, 359–370. [Google Scholar] [CrossRef]
- Frery, M.L.; Siméon, M.; Goldstein, C.; Féménias, P.; Borde, F.; Houpert, A.; Olea Garcia, A. Sentinel-3 Microwave Radiometers: Instrument Description, Calibration and Geophysical Products Performances. Remote Sens. 2020, 12, 2590. [Google Scholar] [CrossRef]
- Mertikas, S.; Partsinevelos, P.; Tripolitsiotis, A.; Kokolakis, C.; Petrakis, G.; Frantzis, X. Validation of Sentinel-3 OLCI Integrated Water Vapor Products Using Regional GNSS Measurements in Crete, Greece. Remote Sens. 2020, 12, 2606. [Google Scholar] [CrossRef]
- Sentinel-3 OLCI Report. Available online: https://sentinels.copernicus.eu/documents/247904/4069162/Sentinel-3-MPC-ACR-OLCI-Cyclic-Report-056-037.pdf (accessed on 1 March 2021).
- Stokes, G.M.; Schwartz, S.E. The Atmospheric Radiation Measurement (ARM) Program: Programmatic background and design of the cloud and radiation test bed. Bull. Am. Meteorol. Soc. 1994, 75, 1201–1222. [Google Scholar] [CrossRef]
- Turner, D.D.; Clough, S.A.; Liljegren, J.C.; Clothiaux, E.E.; Cady-Pereira, K.E.; Gaustad, K.L. Retrieving Liquid Wat0er Path and Precipitable Water Vapor From the Atmospheric Radiation Measurement (ARM) Microwave Radiometers. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3680–3690. [Google Scholar] [CrossRef]
- Turner, D.D.; Lesht, B.M.; Clough, S.A.; Liljegren, J.C.; Revercomb, H.E.; Tobin, D. Dry bias and variability in Vaisala RS80-H radiosondes: The ARM experience. J. Atmos. Ocean. Technol. 2003, 20, 117–132. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.A.; Tanre, D.; Buis, J.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.; Nakajima, T.; et al. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Bruegge, C.J.; Conel, J.E.; Green, R.O.; Margolis, J.S.; Holm, R.G.; Toon, G. Water vapor column abundance retrievals during FIFE. J. Geophys. Res. Atmos. 1992, 97, 18759–18768. [Google Scholar] [CrossRef]
- FoxTx, R. A simple instrument and technique for measuring columnar water vapor via near-IR differential solar transmission measurements. IEEE Trans. Geosci. Remote Sens. 1992, 30, 825–831. [Google Scholar]
- Holben, B.N.; Eck, T.; Slutsker, I.; Smirnov, A.; Sinyuk, A.; Schafer, J.; Giles, D.; Dubovik, O. AERONET’s version 2.0 quality assurance criteria. In Remote Sensing of the Atmosphere and Clouds; International Society for Optics and Photonics: Bellingham, WA, USA, 2006; Volume 6408, p. 64080Q. [Google Scholar]
- Pérez-Ramírez, D.; Whiteman, D.N.; Smirnov, A.; Lyamani, H.; Holben, B.N.; Pinker, R.; Andrade, M.; Alados-Arboledas, L. Evaluation of AERONET precipitable water vapor versus microwave radiometry, GPS, and radiosondes at ARM sites. J. Geophys. Res. Atmos. 2014, 119, 9596–9613. [Google Scholar] [CrossRef]
- Ware, R.H.; Fulker, D.W.; Stein, S.A.; Anderson, D.N.; Avery, S.K.; Clark, R.D.; Droegemeier, K.K.; Kuettner, J.P.; Minster, J.B.; Sorooshian, S. SuomiNet: A real-time national GPS network for atmospheric research and education. Bull. Am. Meteorol. Soc. 2000, 81, 677–694. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Dai, A.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Gendt, G.; Dick, G.; Reigber, C.; Tomassini, M.; LIU, Y.; Ramatschi, M. Near real time GPS water vapor monitoring for numerical weather prediction in Germany. J. Meteorol. Soc. Jap. Ser. II 2004, 82, 361–370. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F.; Rothacher, M. A new data processing strategy for huge GNSS global networks. J. Geod. 2006, 80, 199–203. [Google Scholar] [CrossRef]
- Lammert, A.; Hansen, A.; Ament, F.; Crewell, S.; Dick, G.; Grützun, V.; Klein-Baltink, H.; Lehmann, V.; Macke, A.; Pospichal, B.; et al. A Standardized Atmospheric Measurement Data archive for distributed cloud and precipitation process-oriented observations in central Europe. Bull. Am. Meteorol. Soc. 2019, 100, 1299–1314. [Google Scholar] [CrossRef]
- Standardized Atmospheric Measurement Data. Available online: http://doi.org/10.17616/R3D944 (accessed on 1 March 2021).
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; World Scientific: Singapore, 2000; Volume 2. [Google Scholar]
- Lindstrot, R.; Preusker, R. On the efficient treatment of temperature profiles for the estimation of atmospheric transmittance under scattering conditions. Atmos. Meas. Tech. 2012, 5, 2525. [Google Scholar] [CrossRef]
- Rothman, L.S.; Gordon, I.E.; Babikov, Y.; Barbe, A.; Benner, D.C.; Bernath, P.F.; Birk, M.; Bizzocchi, L.; Boudon, V.; Brown, L.R.; et al. The HITRAN2012 molecular spectroscopic database. J. Quant. Spectrosc. Radiat. Transf. 2013, 130, 4–50. [Google Scholar] [CrossRef]
- Doppler, L.; Carbajal-Henken, C.; Pelon, J.; Ravetta, F.; Fischer, J. Extension of radiative transfer code MOMO, matrix-operator model to the thermal infrared–Clear air validation by comparison to RTTOV and application to CALIPSO-IIR. J. Quant. Spectrosc. Radiat. Transf. 2014, 144, 49–67. [Google Scholar] [CrossRef]
- Hollstein, A.; Fischer, J. Radiative transfer solutions for coupled atmosphere ocean systems using the matrix operator technique. J. Quant. Spectrosc. Radiat. Transf. 2012, 113, 536–548. [Google Scholar] [CrossRef]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Roquet, P.; Matricardi, M.; Geer, A.; et al. An update on the RTTOV fast radiative transfer model (currently at version 12). Geosci. Model Dev. 2018, 11. [Google Scholar] [CrossRef]
- Sentinel 3 CalVal Team. Technical Note: Sentinel-3 OLCI-A Spectral Response Functions; Reference: S3-TN-ESA-OL-660; Technical Report; ESA: Paris, France, 2016. [Google Scholar]
- Lindstrot, R.; Preusker, R.; Fischer, J. Empirical correction of stray light within the MERIS oxygen A-band channel. J. Atmos. Ocean. Technol. 2010, 27, 1185–1194. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration and United States. Air Force. In US Standard Atmosphere, 1976; National Oceanic and Atmospheric Administration: Washington, DC, USA, 1976; Volume 76. [Google Scholar]
- Trent, T.; Schröder, M.; Remedios, J. GEWEX water vapor assessment: Validation of AIRS tropospheric humidity profiles with characterized radiosonde soundings. J. Geophys. Res. Atmos. 2019, 124, 886–906. [Google Scholar] [CrossRef]
- Boggs, P.T.; Rogers, J.E. Orthogonal distance regression. Contemp. Math. 1990, 112, 183–194. [Google Scholar]
- Farr, T.G.; Kobrick, M. Shuttle Radar Topography Mission produces a wealth of data. Eos Trans. Am. Geophys. Union 2000, 81, 583–585. [Google Scholar] [CrossRef]
- Sayer, A.M.; Govaerts, Y.; Kolmonen, P.; Lipponen, A.; Luffarelli, M.; Mielonen, T.; Patadia, F.; Popp, T.; Povey, A.C.; Stebel, K.; et al. A review and framework for the evaluation of pixel-level uncertainty estimates in satellite aerosol remote sensing. Atmos. Meas. Tech. 2020, 13, 373–404. [Google Scholar] [CrossRef]
- Smirnov, A.; Holben, B.; Eck, T.; Dubovik, O.; Slutsker, I. Cloud-Screening and Quality Control Algorithms for the AERONET Database. Remote Sens. Environ. 2000, 73, 337–349. [Google Scholar] [CrossRef]
- Gröbner, J.; Kouremeti, N. The Precision Solar Spectroradiometer (PSR) for direct solar irradiance measurements. Sol. Energy 2019, 185, 199–210. [Google Scholar] [CrossRef]
- Cede, A.; Herman, J.; Richter, A.; Krotkov, N.; Burrows, J. Measurements of nitrogen dioxide total column amounts using a Brewer double spectrophotometer in direct Sun mode. J. Geophys. Res. Atmos. 2006, 111. [Google Scholar] [CrossRef]
- Herman, J.; Cede, A.; Spinei, E.; Mount, G.; Tzortziou, M.; Abuhassan, N. NO2 column amounts from ground-based Pandora and MFDOAS spectrometers using the direct-Sun DOAS technique: Intercomparisons and application to OMI validation. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Herman, J.; Evans, R.; Cede, A.; Abuhassan, N.; Petropavlovskikh, I.; McConville, G. Comparison of ozone retrievals from the Pandora spectrometer system and Dobson spectrophotometer in Boulder, Colorado. Atmos. Meas. Tech. Discuss. 2015, 8, 3407–3418. [Google Scholar] [CrossRef]
- Ouaknine, J.; Viard, T.; Napierala, B.; Foerster, U.; Fray, S.; Hallibert, P.; Durand, Y.; Imperiali, S.; Pelouas, P.; Rodolfo, J.; et al. The FCI on board MTG: Optical design and performances. International Conference on Space Optics—ICSO 2014; International Society for Optics and Photonics: Cardiff, UK, 2017; Volume 10563, p. 1056323. [Google Scholar]
- Spezzi, L.; Borde, R.; Phillips, P.; Schlüssel, P.; Watts, P. Validation activities for the level 2 geophysical products of the EUMETSAT Polar System-Second Generation (EPS-SG) visible/infrared imager (METimage). In Remote Sensing of Clouds and the Atmosphere XXIII; International Society for Optics and Photonics: Cardiff, UK, 2018; Volume 10786, p. 1078603. [Google Scholar]
- Coppo, P.; Ricciarelli, B.; Brandani, F.; Delderfield, J.; Ferlet, M.; Mutlow, C.; Munro, G.; Nightingale, T.; Smith, D.; Bianchi, S.; et al. SLSTR: A high accuracy dual scan temperature radiometer for sea and land surface monitoring from space. J. Mod. Opt. 2010, 57, 1815–1830. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Swath width | 1270 km |
| Field of view | 68.5° |
| Local solar time (LST) | 09:00–10:30 |
| Full resolution (FR) sub-satellite point | 300 m |
| Reduced resolution (RR) sub-satellite point | 1200 m |
| Radiometric accuracy | 2% abs, 0.1% rel |
| Band | Centre (nm) | Width (nm) | Function |
|---|---|---|---|
| Oa17 | 865 | 20 | Atmospheric and aerosol correction, clouds, pixel co-registration |
| Oa18 | 885 | 10 | Water vapour absorption reference band/vegetation monitoring |
| Oa19 | 900 | 10 | Water vapour absorption/vegetation monitoring |
| Oa20 | 940 | 20 | Water vapour absorption, Atmospheric correction/aerosol correction |
| Oa21 * | 1015 | 40 | Atmospheric and aerosol correction |
| Forward Operator | State Vector Parameters | LUT Dimensions and Values |
|---|---|---|
| Land | TCWV AL0 and AL1 | WVC in kg/m2 [0.1, 0.5, 5, 20, 40, 75] AL0 and AL1 [0.001, 0.01, 0.1, 0.3, 1] AOT [0, 0.05, 0.1, 0.2, 0.7] PRS in hPa [1030, 780, 530] TMP in K [263.13, 288.13, 313.13] SUZ and VIE in degree [0, 0.8, 18.9, 28.0, 37.1, 46.1, 55.2, 64.3, 73.4] AZI in degree [0, 18, 36, 54, 72, 90, 108, 126, 144, 162, 180] |
| Band | a | b |
|---|---|---|
| 19 | −0.0054 | 1.061 |
| 20 | 0.023 | 1.147 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Preusker, R.; Carbajal Henken, C.; Fischer, J. Retrieval of Daytime Total Column Water Vapour from OLCI Measurements over Land Surfaces. Remote Sens. 2021, 13, 932. https://doi.org/10.3390/rs13050932
Preusker R, Carbajal Henken C, Fischer J. Retrieval of Daytime Total Column Water Vapour from OLCI Measurements over Land Surfaces. Remote Sensing. 2021; 13(5):932. https://doi.org/10.3390/rs13050932
Chicago/Turabian StylePreusker, René, Cintia Carbajal Henken, and Jürgen Fischer. 2021. "Retrieval of Daytime Total Column Water Vapour from OLCI Measurements over Land Surfaces" Remote Sensing 13, no. 5: 932. https://doi.org/10.3390/rs13050932
APA StylePreusker, R., Carbajal Henken, C., & Fischer, J. (2021). Retrieval of Daytime Total Column Water Vapour from OLCI Measurements over Land Surfaces. Remote Sensing, 13(5), 932. https://doi.org/10.3390/rs13050932