
Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China

 ,
,  ,
,  , ,
, ,
Abstract

1. Introduction
2. Materials and Methods
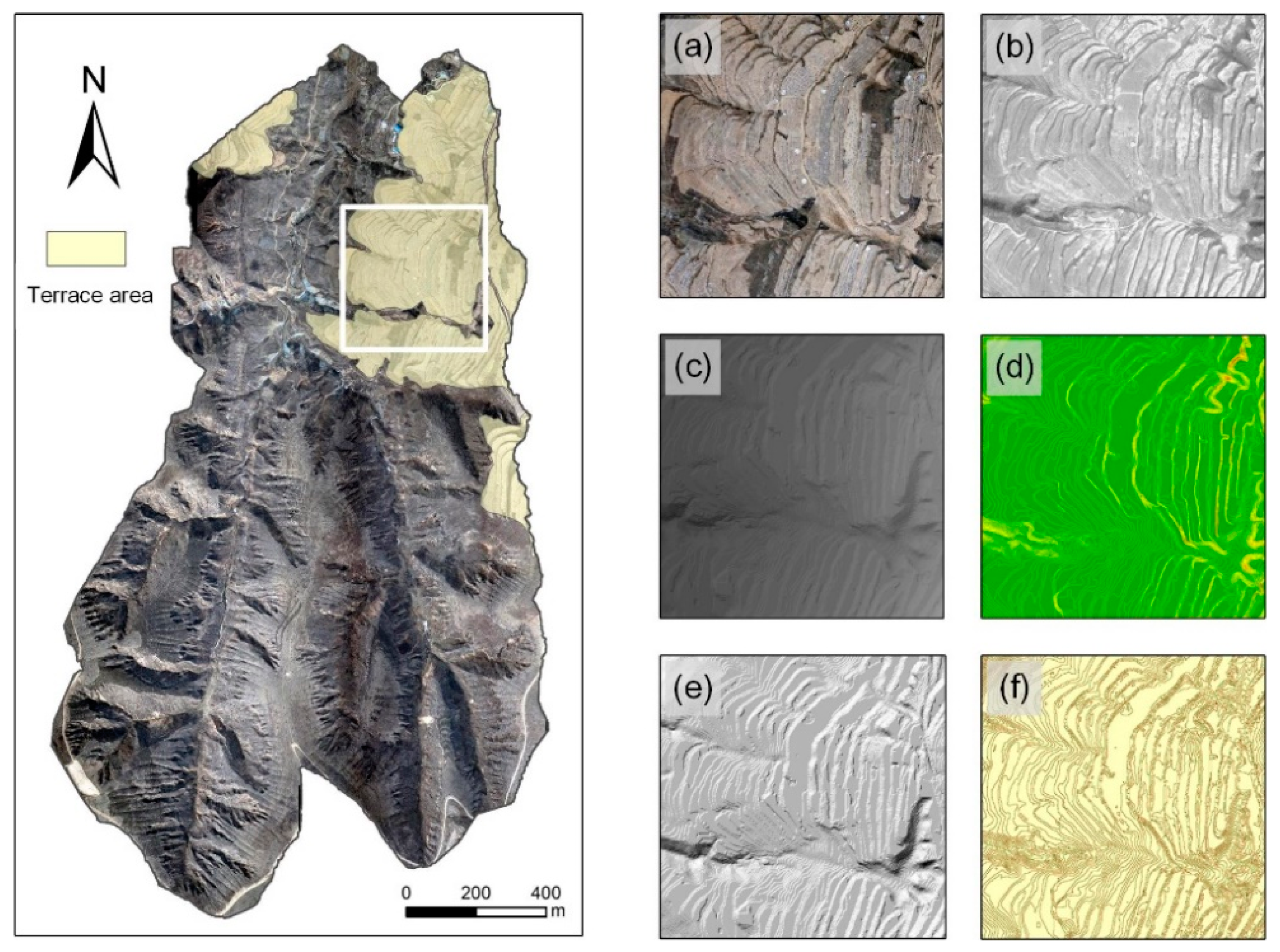
2.1. Study Area and Data
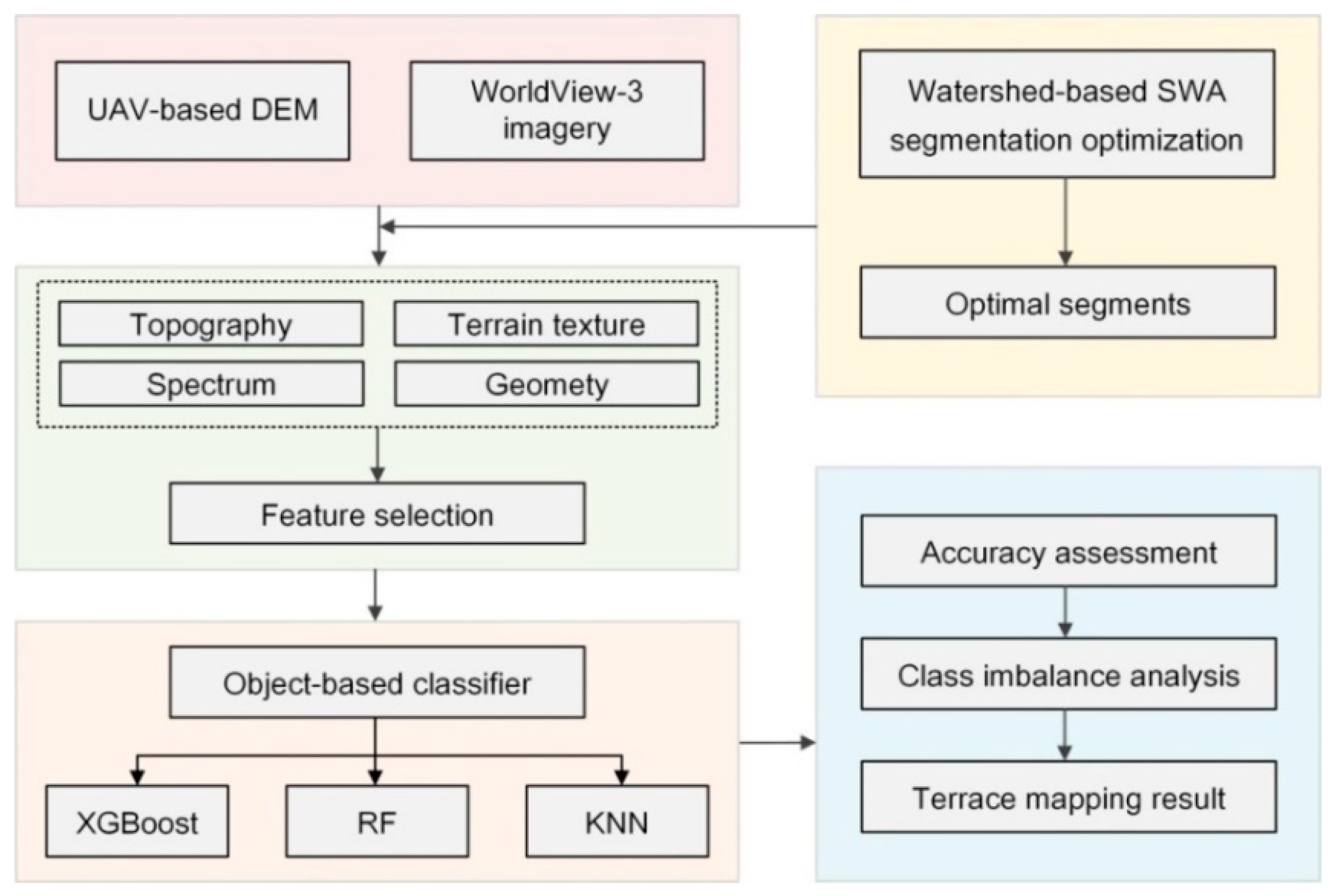
2.2. Methods
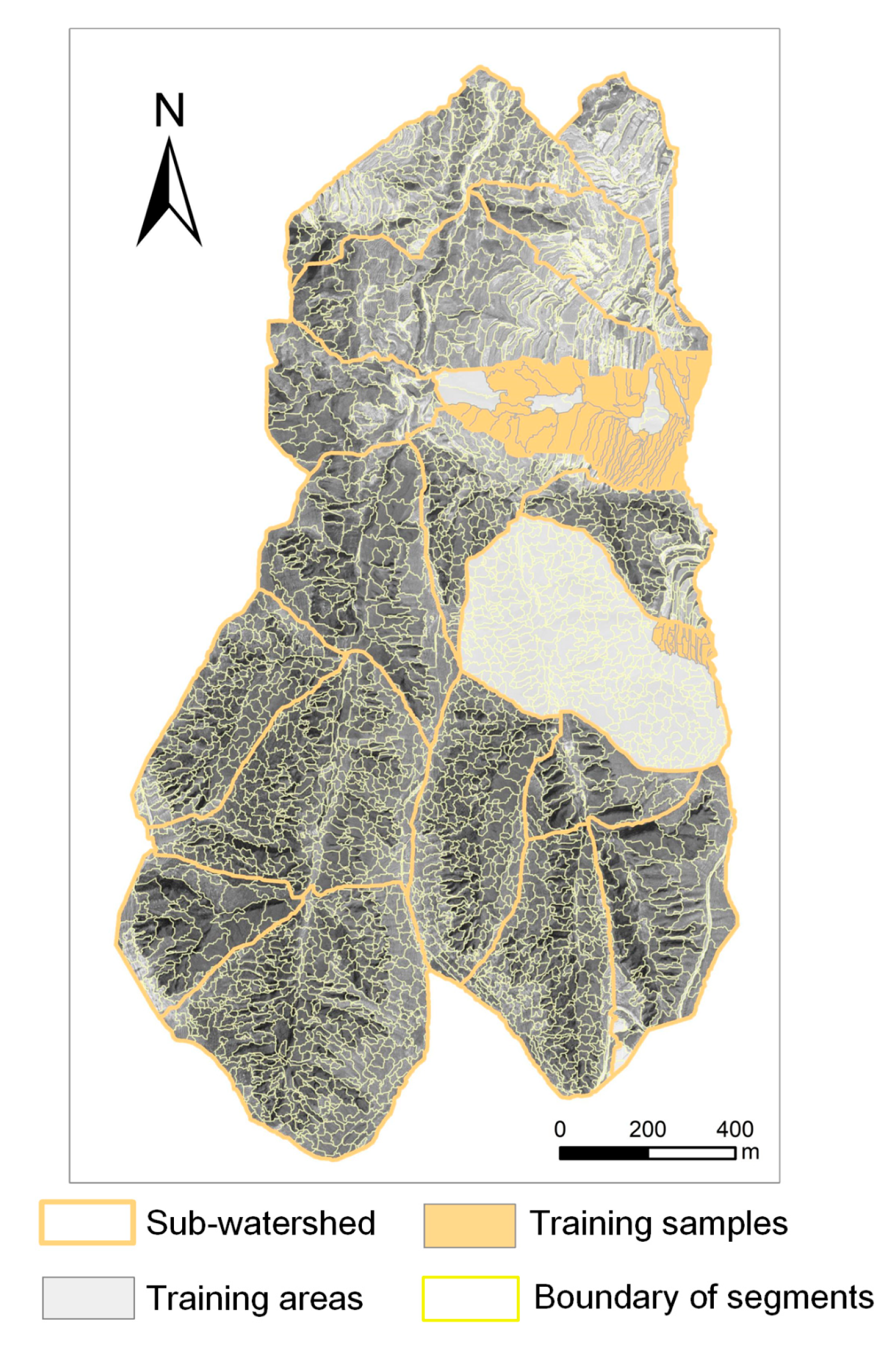
2.2.1. Optimized Image Segmentation
2.2.2. Feature Extraction and Selection
2.2.3. Terrace Mapping Using ML Classifiers
2.2.4. Mapping Accuracy Assessment
3. Results and Analysis
3.1. Image Segmentation and Feature Selection Results
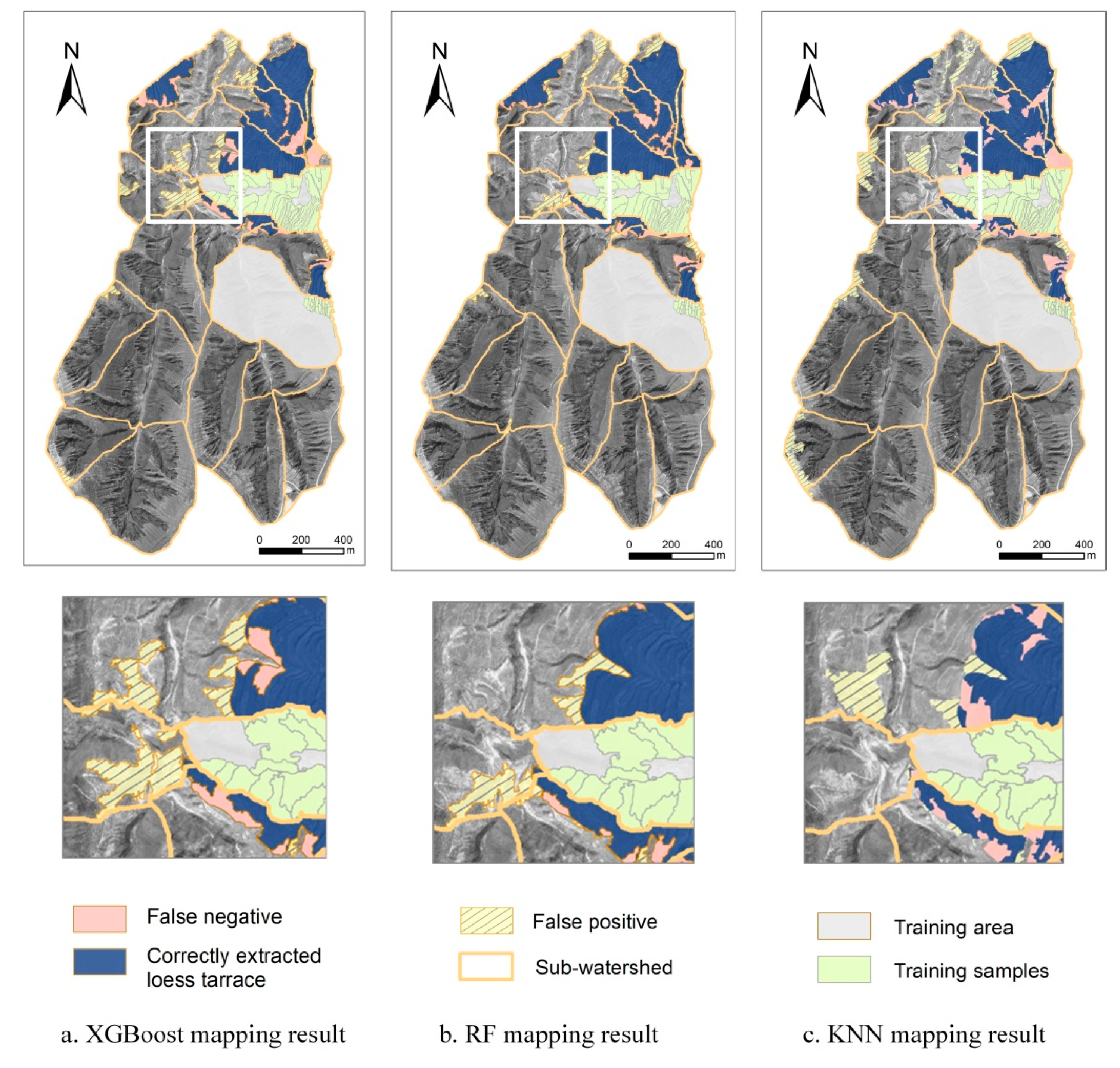
3.2. Terrace Mapping Results and Accuracy Assessment
4. Discussion
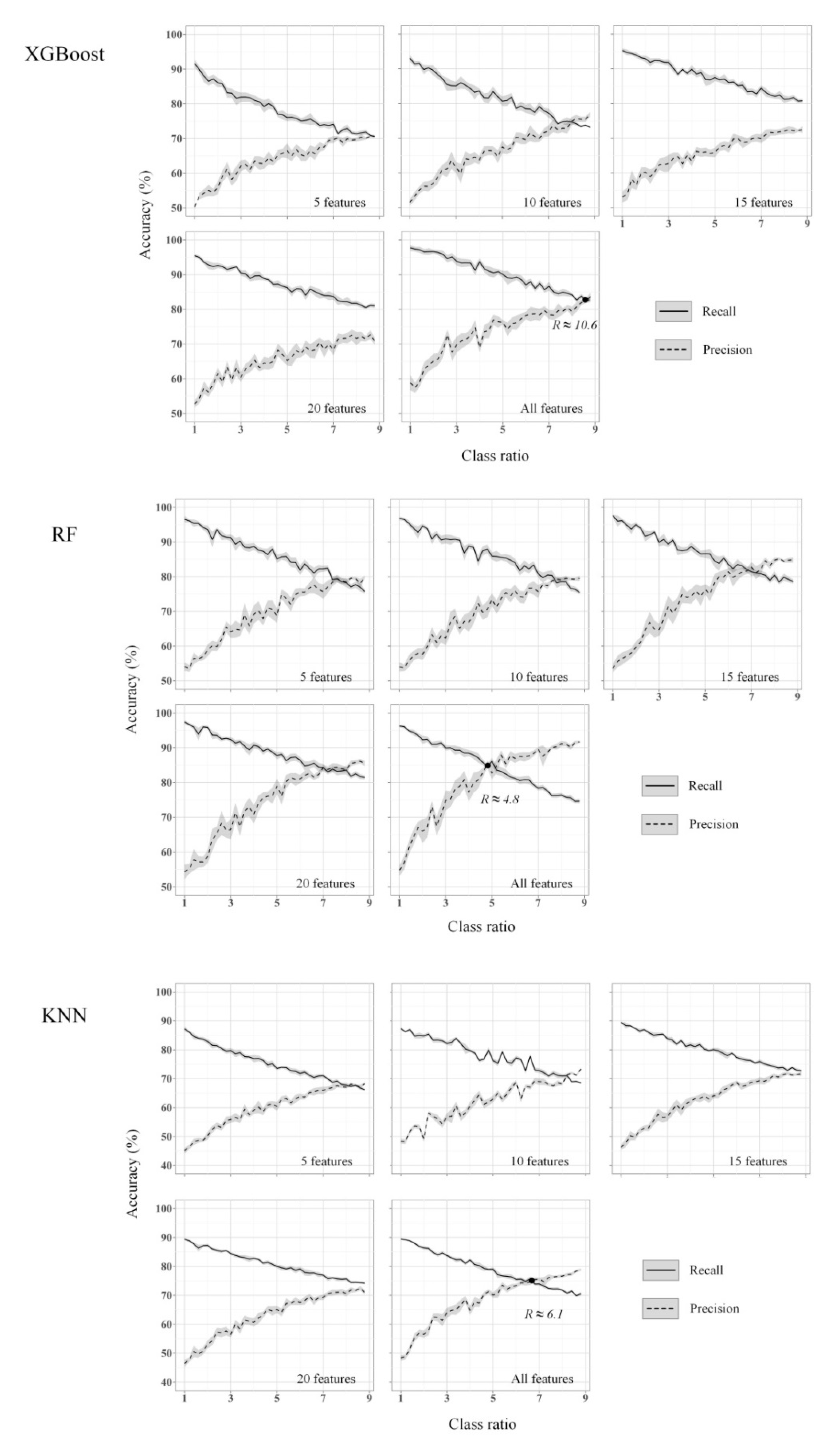
4.1. Influence of Class Imbalance and Feature Selection on Terrace Mapping
4.2. General Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Features | Descriptions |
|---|---|---|
| Spectrum | Mean band (Red, Green, Blue, and Panchromatic band) | The mean intensity of all pixels forming an image object within each band, |
| Brightness | The mean value of the C of all layers, | |
| Maximum Difference | Spectrum difference of all layers, | |
| Geometry | Shape index | The smoothness of an image object border, |
| Length–width | A length-to-width ratio of an image object, | |
| Roundness | Similarity of an object to an ellipse, | |
| Area | The number of pixels forming an image object. | |
| Topography | Mean value (Elevation, Curvature, Roughness, Slope, and Shaded relief) | The mean intensity of all pixels forming an image object within each topographic layer. |
| Terrain texture | Gray-level co-occurrence matrix (GLCM) homogeneity | The GLCM measures how often different combinations of pixel gray levels occur in a scene. In this study, the terrain texture features were derived from GLCM based on five topographic layers. The detail for calculating GLCM was taken from the study by Haralick et al. (1973) [63]. |
| GLCM contrast | ||
| GLCM dissimilarity | ||
| GLCM entropy | ||
| GLCM angular second moment | ||
| GLCM mean | ||
| GLCM standard deviation | ||
| GLCM correlation |
References
- Arnáez, J.; Lana-Renault, N.; Lasanta, T.; Ruiz-Flaño, P.; Castroviejo, J. Effects of farming terraces on hydrological and geomorphological processes. A review. Catena 2015, 128, 122–134. [Google Scholar] [CrossRef]
- Fu, B. Soil erosion and its control in the Loess Plateau of China. Soil Use Manag. 1989, 5, 76–82. [Google Scholar] [CrossRef]
- van Wesemael, B.; Poesen, J.; Benet, A.S.; Barrionuevo, L.C.; Puigdefábregas, J. Collection and storage of runoff from hillslopes in a semi-arid environment: Geomorphic and hydrologic aspects of the aljibe system in Almeria Province, Spain. J. Arid Environ. 1998, 40, 1–14. [Google Scholar] [CrossRef][Green Version]
- Sofia, G.; Roder, G.; Dalla Fontana, G.; Tarolli, P. Flood dynamics in urbanised landscapes: 100 years of climate and humans’ interaction. Sci. Rep. 2017, 7, 40527. [Google Scholar] [CrossRef] [PubMed]
- Arabi, M.; Frankenberger, J.R.; Engel, B.A.; Arnold, J.G. Representation of agricultural conservation practices with SWAT. Hydrol. Process. 2008, 22, 3042–3055. [Google Scholar] [CrossRef]
- Shi, Z.; Ai, L.; Fang, N.; Zhu, H. Modeling the impacts of integrated small watershed management on soil erosion and sediment delivery: A case study in the Three Gorges Area, China. J. Hydrol. 2012, 438, 156–167. [Google Scholar] [CrossRef]
- Strehmel, A.; Jewett, A.; Schuldt, R.; Schmalz, B.; Fohrer, N. Field data-based implementation of land management and terraces on the catchment scale for an eco-hydrological modelling approach in the Three Gorges Region, China. Agric. Water Manag. 2016, 175, 43–60. [Google Scholar] [CrossRef]
- Cucchiaro, S.; Fallu, D.J.; Zhang, H.; Walsh, K.; van Oost, K.; Brown, A.G.; Tarolli, P. Multiplatform-SfM and TLS data fusion for monitoring agricultural terraces in complex topographic and landcover conditions. Remote Sens. 2020, 12, 1946. [Google Scholar] [CrossRef]
- Ritsema, C.J. Introduction: Soil erosion and participatory land use planning on the Loess Plateau in China. Catena 2003, 1, 1–5. [Google Scholar] [CrossRef]
- Delang, C.O.; Yuan, Z. China’s Grain for Green Program; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Tsunekawa, A.; Liu, G.; Yamanaka, N.; Du, S. Restoration and Development of the Degraded Loess Plateau, China; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Wen, Y.; Gao, P.; Mu, X.; Zhao, G.; Sun, W. Effect of rainfall intensity on Rill erosion on terrace wall. Res. Soil Water Conserv. 2018, 25, 6–10. [Google Scholar]
- Dai, W.; Na, J.; Huang, N.; Hu, G.; Yang, X.; Tang, G.; Xiong, L.; Li, F. Integrated edge detection and terrain analysis for agricultural terrace delineation from remote sensing images. Int. J. Geogr. Inf. Sci. 2020, 34, 484–503. [Google Scholar] [CrossRef]
- Agnoletti, M.; Cargnello, G.; Gardin, L.; Santoro, A.; Bazzoffi, P.; Sansone, L.; Pezza, L.; Belfiore, N. Traditional landscape and rural development: Comparative study in three terraced areas in Northern, Central and Southern Italy to evaluate the efficacy of GAEC standard 4.4 of cross compliance. Ital. J. Agron. 2011, 6, e16. [Google Scholar] [CrossRef]
- Liu, X.; Yang, S.; Wang, F.; He, X.; Ma, H.; Luo, Y. Analysis on sediment yield reduced by current terrace and shrubs-herbs-arbor vegetation in the Loess Plateau. J. Hydraul. Eng. 2014, 45, 1293–1300. [Google Scholar]
- Dai, W.; Hu, G.; Huang, N.; Zhang, P.; Yang, X.; Tang, G. A contour-directional detection for deriving terrace ridge from open source images and digital elevation models. IEEE Access 2019, 7, 129215–129224. [Google Scholar] [CrossRef]
- Na, J.; Yang, X.; Fang, X.; Tang, G.; Pfeifer, N. Mapping artificial terraces from image matching point cloud in Loess Plateau of China. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 469–473. [Google Scholar] [CrossRef]
- Luo, L.; Li, F.; Dai, Z.; Yang, X.; Liu, W.; Fang, X. Terrace extraction based on remote sensing images and digital elevation model in the loess plateau, China. Earth Sci. Inform. 2020, 13, 433–446. [Google Scholar] [CrossRef]
- Na, J.; Xue, K.; Xiong, L.; Tang, G.; Ding, H.; Strobl, J.; Pfeifer, N. UAV-based terrain modeling under vegetation in the chinese Loess plateau: A deep learning and terrain correction ensemble framework. Remote Sens. 2020, 12, 3318. [Google Scholar] [CrossRef]
- Martínez-Casasnovas, J.A.; Ramos, M.C.; Cots-Folch, R. Influence of the EU CAP on terrain morphology and vineyard cultivation in the Priorat region of NE Spain. Land Use Policy 2010, 27, 11–21. [Google Scholar] [CrossRef]
- Li, Y.; Gong, J.; Wang, D.; An, L.; Li, R. Sloping farmland identification using hierarchical classification in the Xi-He region of China. Int. J. Remote Sens. 2013, 34, 545–562. [Google Scholar] [CrossRef]
- Zhao, H.; Fang, X.; Ding, H.; Josef, S.; Xiong, L.; Na, J.; Tang, G. Extraction of terraces on the Loess Plateau from high-resolution DEMs and imagery utilizing object-based image analysis. ISPRS Int. J. Geo Inf. 2017, 6, 157. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Ding, H.; Liu, K.; Chen, X.; Xiong, L.; Tang, G.; Qiu, F.; Strobl, J. Optimized Segmentation Based on the Weighted Aggregation Method for Loess Bank Gully Mapping. Remote Sens. 2020, 12, 793. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of gully-affected areas by applying object-based image analysis (OBIA) in the region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.; Zhu, A.-X.; Yang, X.; Jiang, S.; Cao, J. An object-based approach for two-level gully feature mapping using high-resolution DEM and imagery: A case study on hilly loess plateau region, China. Chin. Geogr. Sci. 2017, 27, 415–430. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, X.; Wang, X.; Yuan, J. Self-adaptive segmentation of satellite images based on a weighted aggregation approach. GISci. Remote Sens. 2019, 56, 233–255. [Google Scholar] [CrossRef]
- Jozdani, S.E.; Momeni, M.; Johnson, B.A.; Sattari, M. A regression modelling approach for optimizing segmentation scale parameters to extract buildings of different sizes. Int. J. Remote Sens. 2018, 39, 684–703. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, L.; Li, M.; Liu, Y.; Ma, X. Training set size, scale, and features in Geographic Object-Based Image Analysis of very high resolution unmanned aerial vehicle imagery. ISPRS J. Photogramm. Remote Sens. 2015, 102, 14–27. [Google Scholar] [CrossRef]
- Hong, H.; Liu, J.; Bui, D.T.; Pradhan, B.; Acharya, T.D.; Pham, B.T.; Zhu, A.-X.; Chen, W.; Ahmad, B.B. Landslide susceptibility mapping using J48 Decision Tree with AdaBoost, Bagging and Rotation Forest ensembles in the Guangchang area (China). Catena 2018, 163, 399–413. [Google Scholar] [CrossRef]
- Tavakkoli Piralilou, S.; Shahabi, H.; Jarihani, B.; Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Aryal, J. Landslide detection using multi-scale image segmentation and different machine learning models in the higher himalayas. Remote Sens. 2019, 11, 2575. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, Z.; Wang, M.; Peng, L.; Hong, H. Comparative study of landslide susceptibility mapping with different recurrent neural networks. Comput. Geosci. 2020, 138, 104445. [Google Scholar] [CrossRef]
- Zhou, D.; Zhao, S.; Zhu, C. The Grain for Green Project induced land cover change in the Loess Plateau: A case study with Ansai County, Shanxi Province, China. Ecol. Indic. 2012, 23, 88–94. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Zhu, Q.; He, Y.; Yao, W. Assessment of bank gully development and vegetation coverage on the Chinese Loess Plateau. Geomorphology 2015, 228, 462–469. [Google Scholar] [CrossRef]
- Chen, Y.; Jiao, J.; Wei, Y.; Zhao, H.; Yu, W.; Cao, B.; Xu, H.; Yan, F.; Wu, D.; Li, H. Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China. Int. J. Environ. Res. Public Health 2019, 16, 369. [Google Scholar] [CrossRef]
- Sharon, E.; Brandt, A.; Basri, R. Fast Multiscale Image Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2000 (Cat. No. PR00662), Hilton Head, SC, USA, 13–15 June 2000; pp. 70–77. [Google Scholar]
- Sharon, E.; Brandt, A.; Basri, R. Segmentation and Boundary Detection using Multiscale Intensity Measurements. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, Kauai, HI, USA, 8–14 December 2001; p. 1. [Google Scholar]
- Sharon, E.; Galun, M.; Sharon, D.; Basri, R.; Brandt, A. Hierarchy and adaptivity in segmenting visual scenes. Nature 2006, 442, 810–813. [Google Scholar] [CrossRef] [PubMed]
- Johnson, B.; Xie, Z. Unsupervised image segmentation evaluation and refinement using a multi-scale approach. ISPRS J. Photogramm. Remote Sens. 2011, 66, 473–483. [Google Scholar] [CrossRef]
- Xiong, L.-Y.; Zhu, A.-X.; Zhang, L.; Tang, G.-A. Drainage basin object-based method for regional-scale landform classification: A case study of loess area in China. Phys. Geogr. 2018, 39, 523–541. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Johnson, B.A.; Wolff, E. Scale matters: Spatially partitioned unsupervised segmentation parameter optimization for large and heterogeneous satellite images. Remote Sens. 2018, 10, 1440. [Google Scholar] [CrossRef]
- Johnson, B.A.; Bragais, M.; Endo, I.; Magcale-Macandog, D.B.; Macandog, P.B.M. Image segmentation parameter optimization considering within-and between-segment heterogeneity at multiple scale levels: Test case for mapping residential areas using landsat imagery. ISPRS Int. J. Geo Inf. 2015, 4, 2292–2305. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, 291–314. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Yu, L.; Liu, H. Feature Selection for High-Dimensional Data: A Fast Correlation-Based Filter Solution. In Proceedings of the 20th International Conference on Machine Learning (ICML-03), Washington, DC, USA, 21–24 August 2003; pp. 856–863. [Google Scholar]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. GISci. Remote Sens. 2018, 55, 221–242. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: Reliable Large-Scale Tree Boosting System. 2017. Available online: http://learningsys.org/papers/LearningSys_2015_paper_32.pdf (accessed on 9 October 2019).
- Jozdani, S.E.; Johnson, B.A.; Chen, D. Comparing deep neural networks, ensemble classifiers, and support vector machine algorithms for object-based urban land use/land cover classification. Remote Sens. 2019, 11, 1713. [Google Scholar] [CrossRef]
- Mustapha, I.B.; Saeed, F. Bioactive Molecule Prediction Using Extreme Gradient Boosting. Molecules 2016, 21, 983. [Google Scholar] [CrossRef] [PubMed]
- Xgboost: Extreme Gradient Boosting. 2016. Available online: https://mran.microsoft.com/web/packages/xgboost/vignettes/xgboost.pdf (accessed on 8 March 2021).
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 42. [Google Scholar]
- Bobkowska, K. Analysis of the objects images on the sea using Dempster-Shafer Theory. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–4. [Google Scholar]
- Foley, B.G. A Dempster-Shafer Method for Multi-Sensor Fusion. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson AFB, OH, USA, 2012. [Google Scholar]
- Mezaal, M.R.; Pradhan, B.; Rizeei, H.M. Improving landslide detection from airborne laser scanning data using optimized Dempster—Shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Ding, H.; Na, J.-M.; Huang, X.-l.; Tang, G.-A.; Liu, K. Stability analysis unit and spatial distribution pattern of the terrain texture in the northern Shaanxi Loess Plateau. J. Mt. Sci. 2018, 15, 577–589. [Google Scholar] [CrossRef]
- Shruthi, R.B.; Kerle, N.; Jetten, V. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology 2011, 134, 260–268. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]








| Type | Features |
|---|---|
| Spectrum | Mean band (Red, Green, Blue, and Panchromatic band), Maximum Difference, and Brightness |
| Geometry | Shape index, Length–width, Roundness, and Area |
| Topography | Mean value (Elevation, Curvature, Roughness, Slope, and Shaded relief) |
| Terrain texture | Gray-level co-occurrence matrix (GLCM) homogeneity, GLCM contrast, GLCM dissimilarity, GLCM entropy, GLCM angular second moment, GLCM mean, GLCM standard deviation, and GLCM correlation based on Elevation, Curvature, Roughness, Slope, and Shaded relief |
| Feature Type | Feature | Iteration | Average Rank |
|---|---|---|---|
| Spectrum | Mean value of panchromatic band | 20 | 1.0 |
| Terrain texture | GLCM angular second moment of curvature | 20 | 2.4 |
| Terrain texture | GLCM homogeneity of shade relief | 20 | 5.0 |
| Terrain texture | GLCM homogeneity of curvature | 20 | 5.9 |
| Spectrum | Maximum difference of value | 20 | 7.0 |
| Spectrum | Mean value of band red | 20 | 7.1 |
| Terrain texture | GLCM mean value of shade relief | 20 | 7.1 |
| Geometry | Length/Width | 20 | 7.3 |
| Terrain texture | GLCM angular second moment of elevation | 20 | 9.8 |
| Terrain texture | GLCM homogeneity of slope | 20 | 10.4 |
| Topography | Mean value of shade relief | 20 | 10.9 |
| Terrain texture | GLCM angular second moment of shade relief | 20 | 12.0 |
| Terrain texture | GLCM mean value of roughness | 20 | 12.4 |
| Terrain texture | GLCM homogeneity of roughness | 19 | 13.0 |
| Terrain texture | GLCM standard derivation of curvature | 18 | 14.1 |
| Spectrum | Mean value of band green | 16 | 19.0 |
| Terrain texture | GLCM mean value of slope | 11 | 19.7 |
| Geometry | Area | 12 | 20.5 |
| Topography | Mean value of elevation | 8 | 20.9 |
| Geometry | Shape index | 5 | 22.1 |
| Classifier | Mapping Results | Reference (m2) | Pr | Re | F1 | OA | Kappa | |
|---|---|---|---|---|---|---|---|---|
| Terraces | Non-Terraces | |||||||
| XGBoost | Terraces | 222,855.55 | 49,058.78 | 81.96% | 81.48% | 81.72% | 94.19% | 0.78 |
| Non-Terraces | 50,638.18 | 1,393,215.99 | ||||||
| RF | Terraces | 228,722.81 | 30,747.19 | 88.15% | 83.63% | 85.83% | 95.60% | 0.83 |
| Non-Terraces | 44,770.92 | 1,411,527.58 | ||||||
| KNN | Terraces | 222,743.59 | 80,880.65 | 73.36% | 81.44% | 77.19% | 92.33% | 0.73 |
| Non-Terraces | 50,750.14 | 1,361,394.12 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Na, J.; Jiang, S.; Zhu, J.; Liu, K.; Fu, Y.; Li, F. Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China. Remote Sens. 2021, 13, 1021. https://doi.org/10.3390/rs13051021
Ding H, Na J, Jiang S, Zhu J, Liu K, Fu Y, Li F. Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China. Remote Sensing. 2021; 13(5):1021. https://doi.org/10.3390/rs13051021
Chicago/Turabian StyleDing, Hu, Jiaming Na, Shangjing Jiang, Jie Zhu, Kai Liu, Yingchun Fu, and Fayuan Li. 2021. "Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China" Remote Sensing 13, no. 5: 1021. https://doi.org/10.3390/rs13051021
APA StyleDing, H., Na, J., Jiang, S., Zhu, J., Liu, K., Fu, Y., & Li, F. (2021). Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China. Remote Sensing, 13(5), 1021. https://doi.org/10.3390/rs13051021