
Initial Assessment of Galileo Triple-Frequency Ambiguity Resolution between Reference Stations in the Hong Kong Area

 , ,
, ,
Abstract

1. Introduction
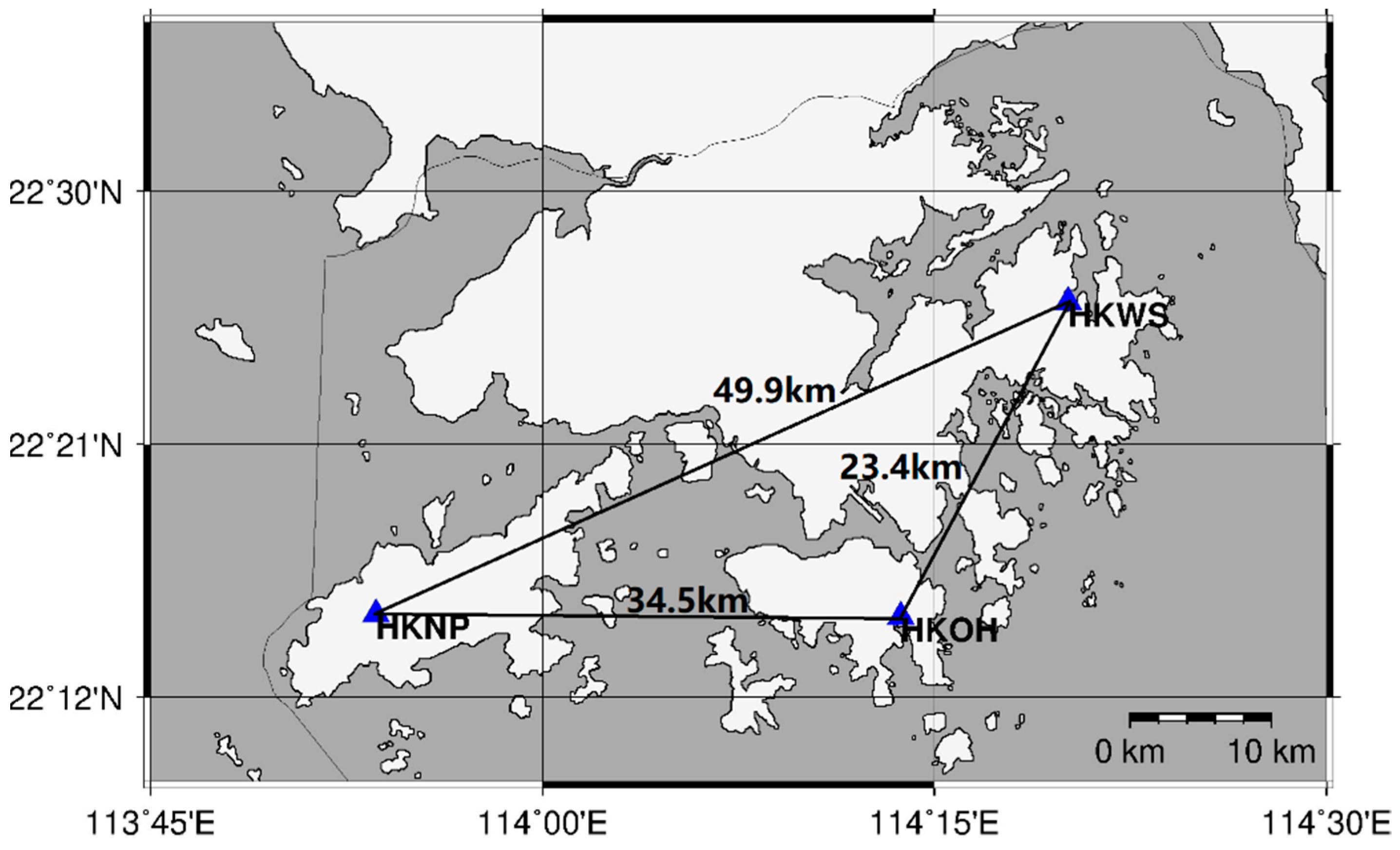
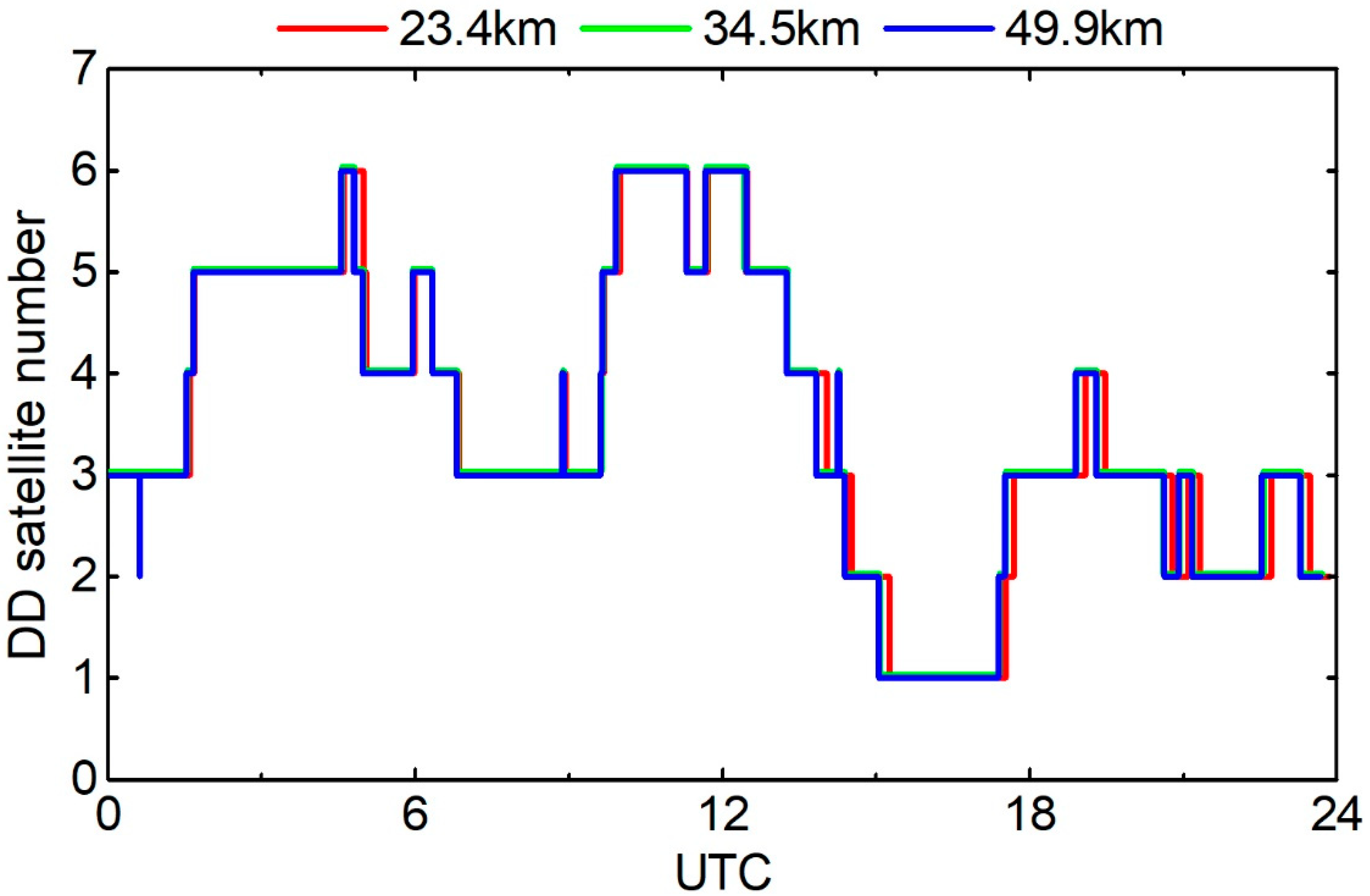
2. Materials and Methods
2.1. Fundamental Mathematical Models
2.2. TCAR Methods
2.2.1. Geometry-Free TCAR Method
2.2.2. Ionospheric-Free TCAR Method
2.2.3. Combined Ionospheric-Free TCAR Method
3. Results
3.1. Galileo Data by GF and IF TCAR Methods
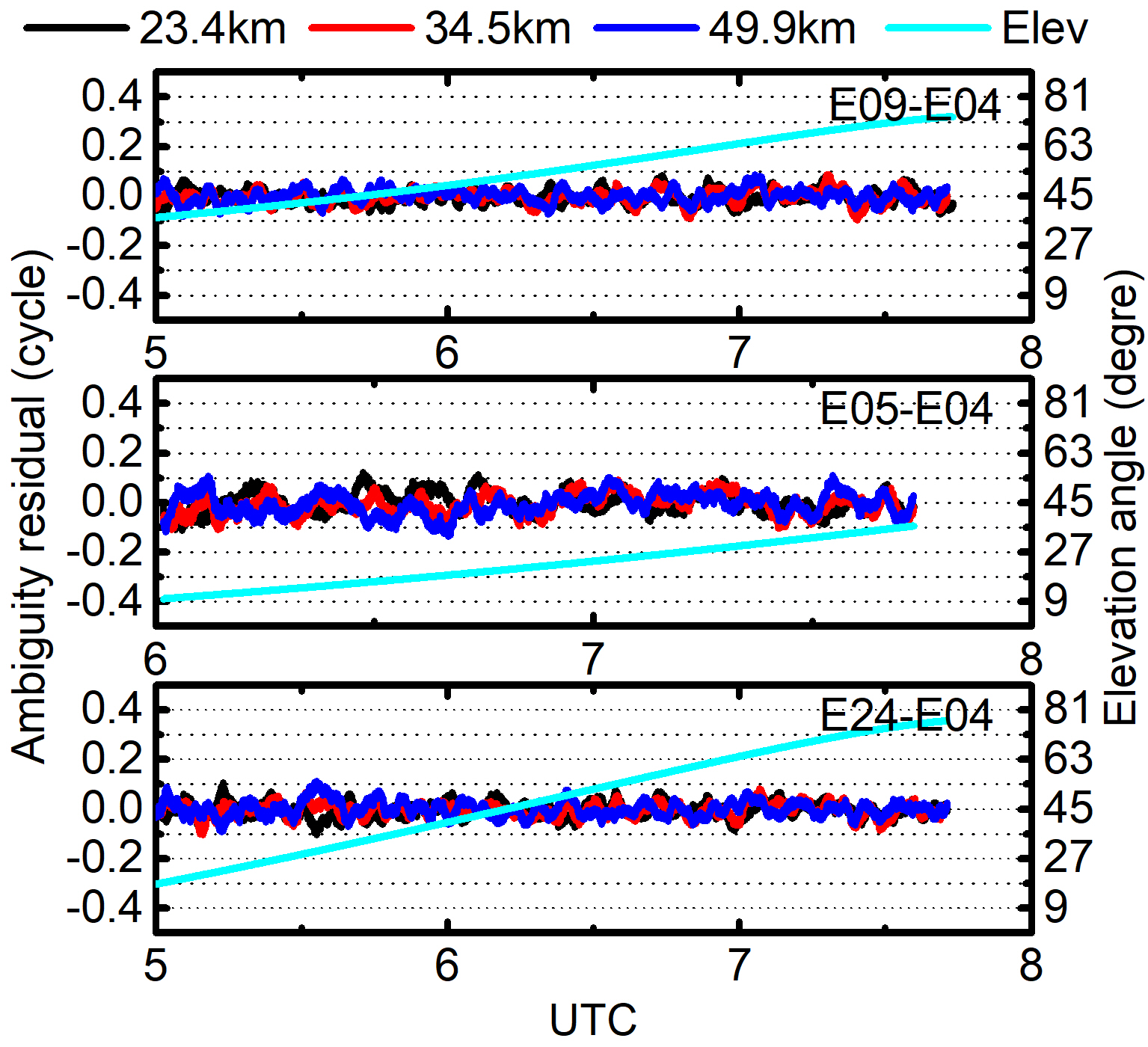
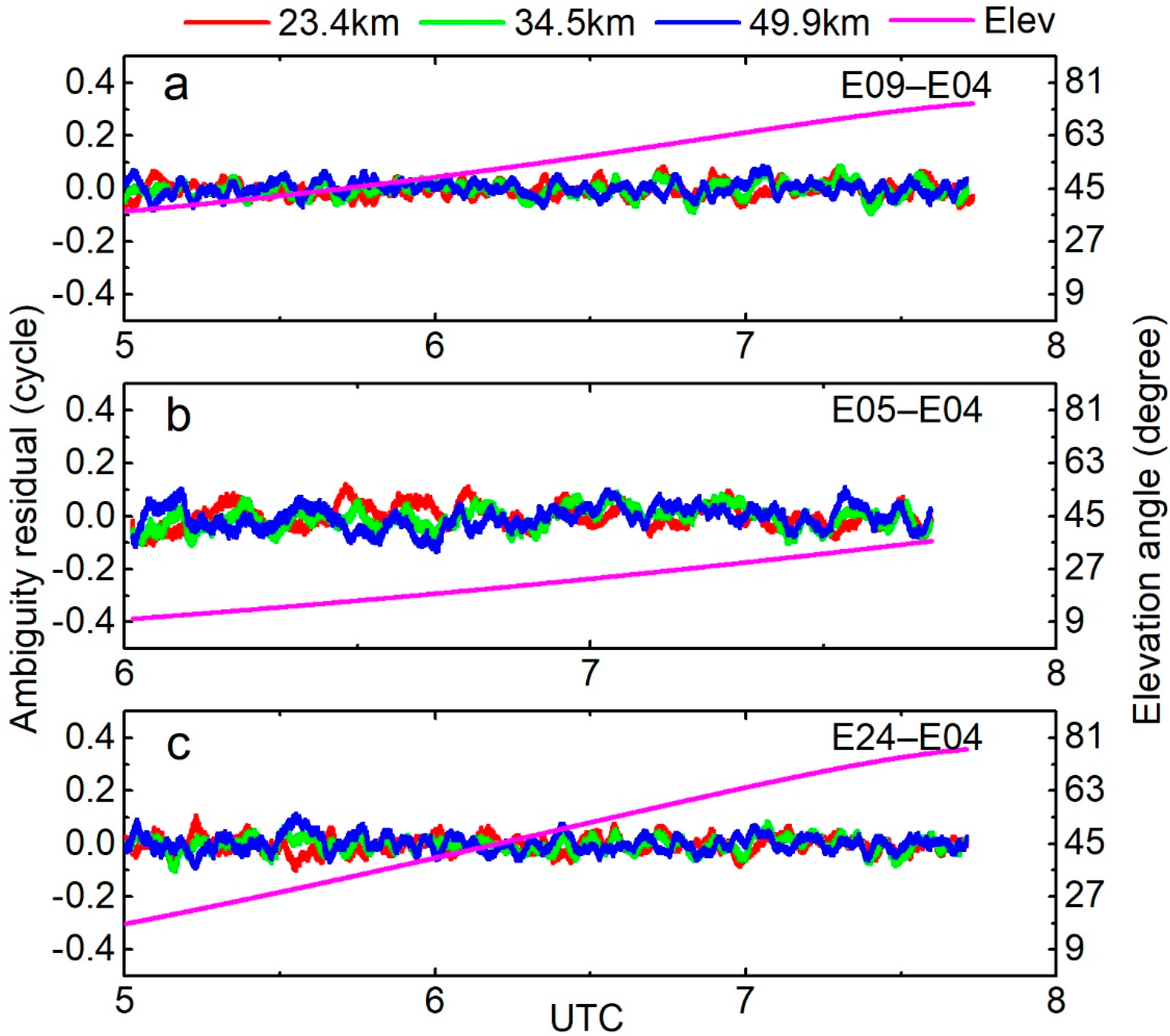
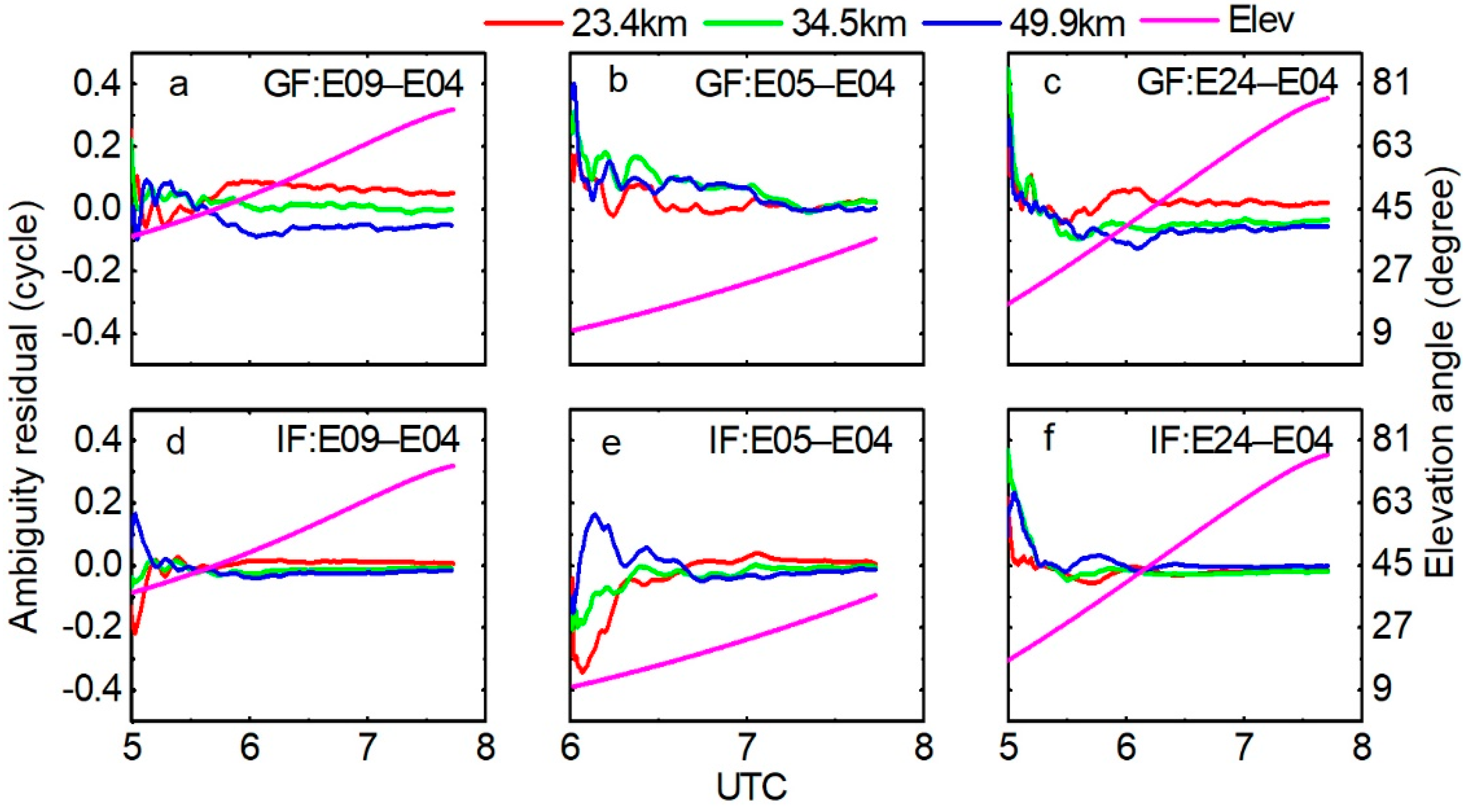
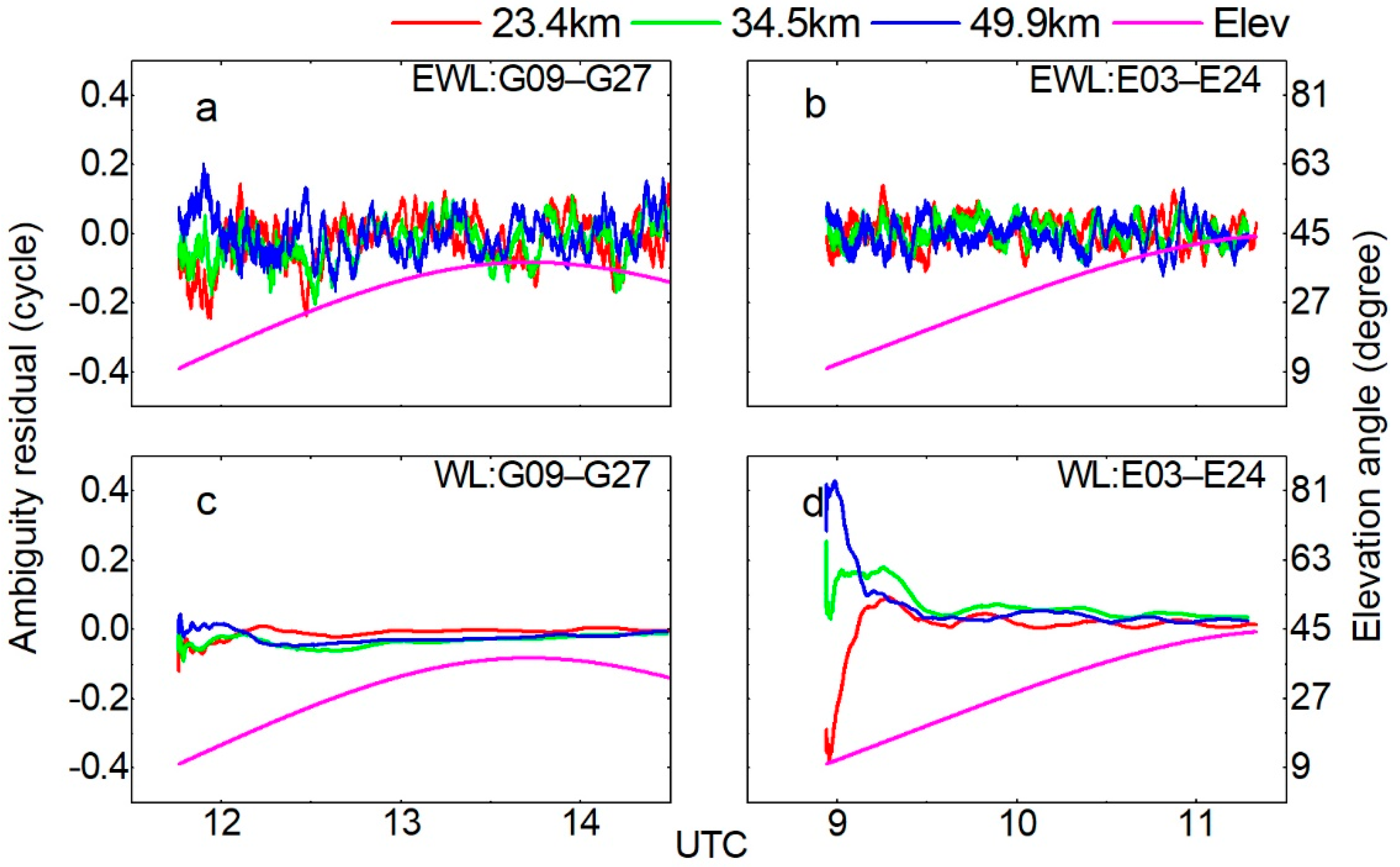
3.1.1. AR for the Optimal EWL Combination
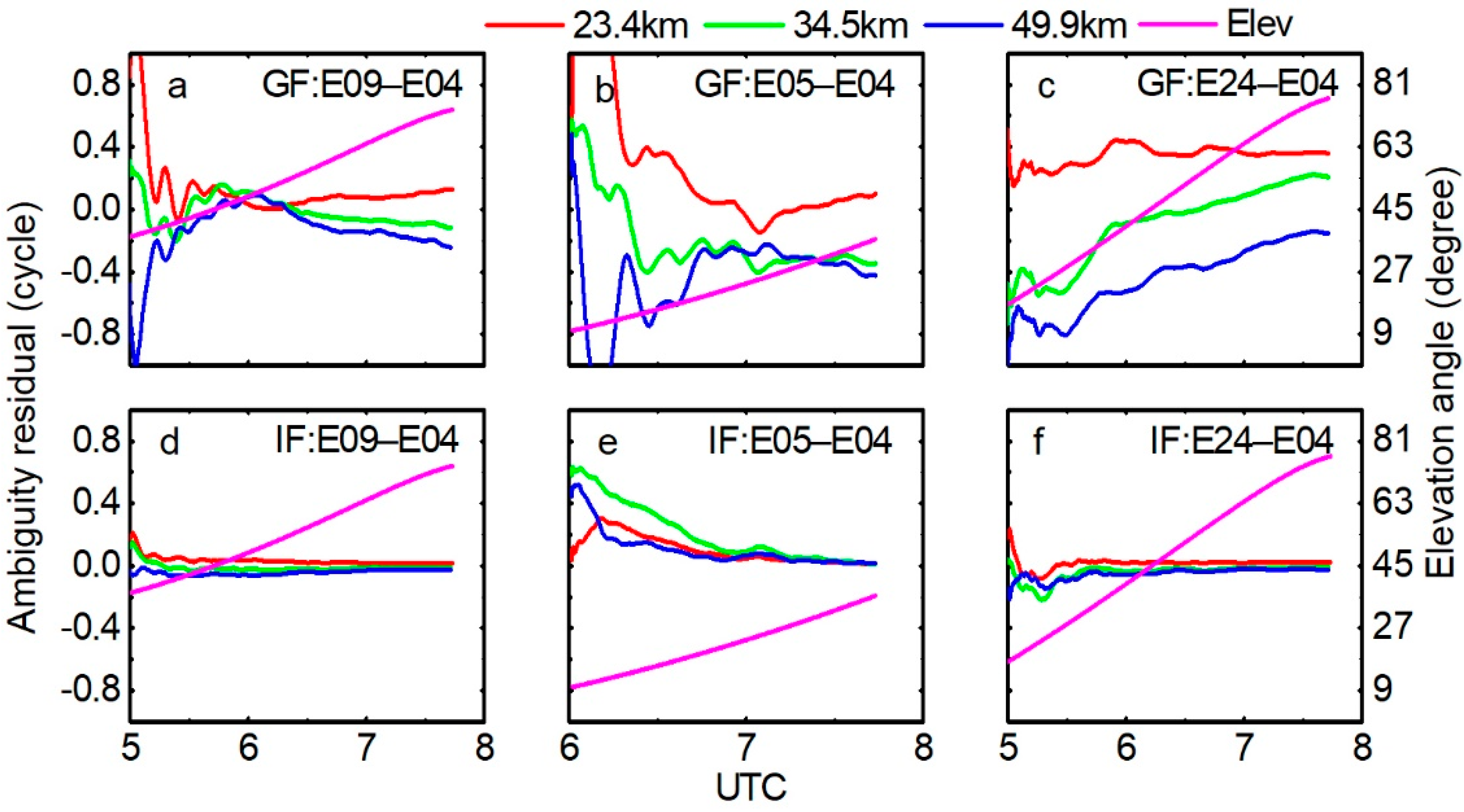
3.1.2. AR for the Optimal WL Combination
3.1.3. AR for the E1 Signal
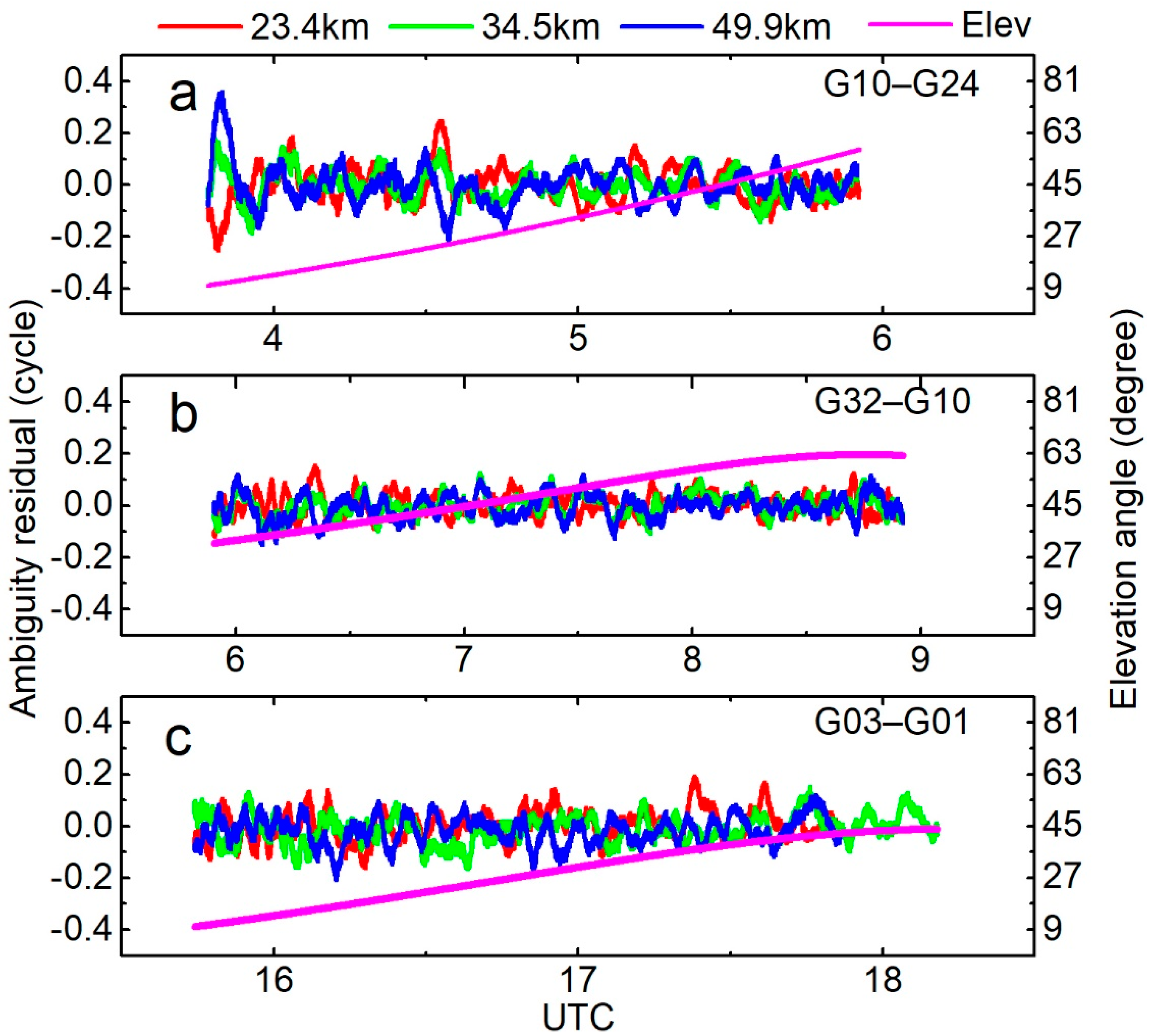
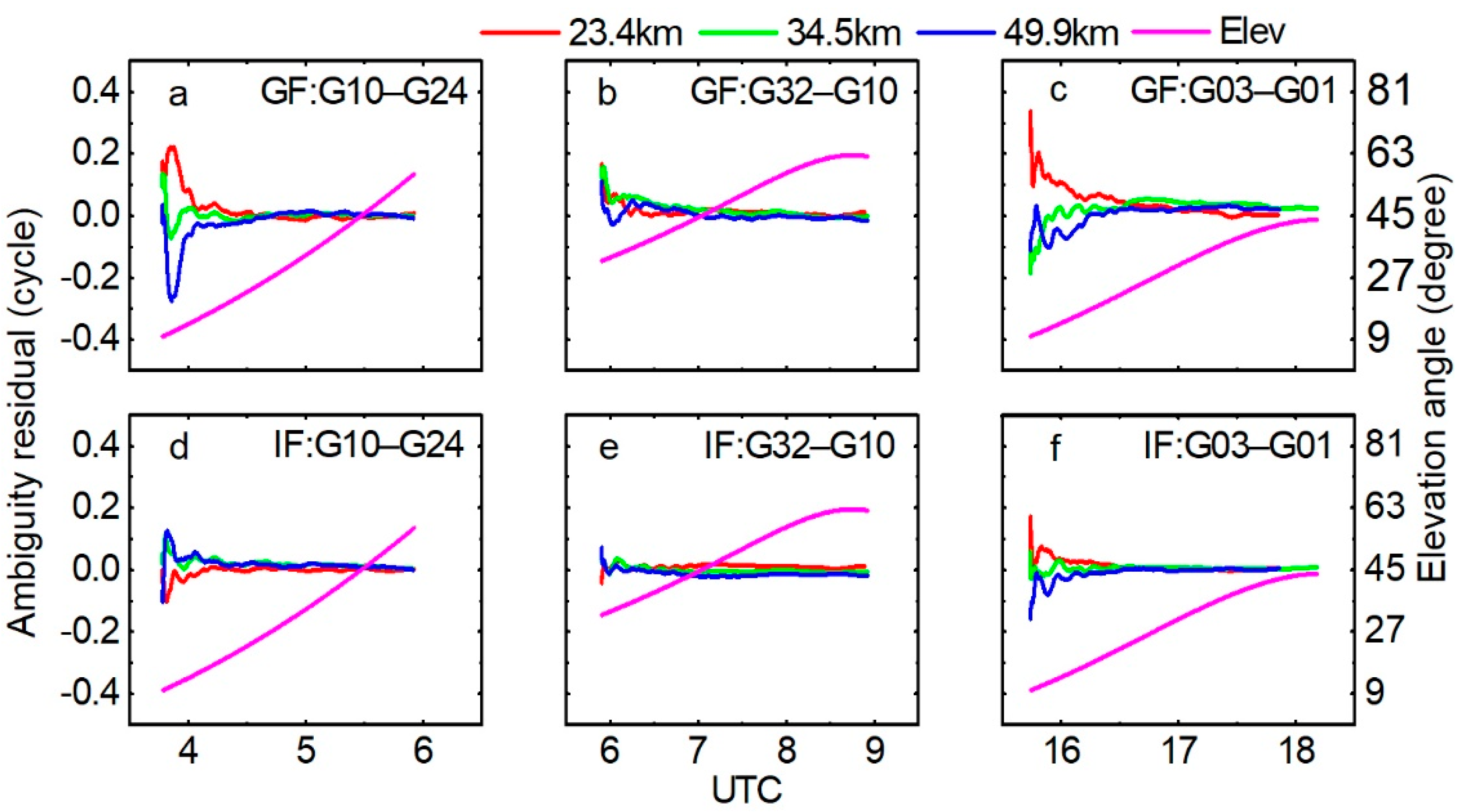
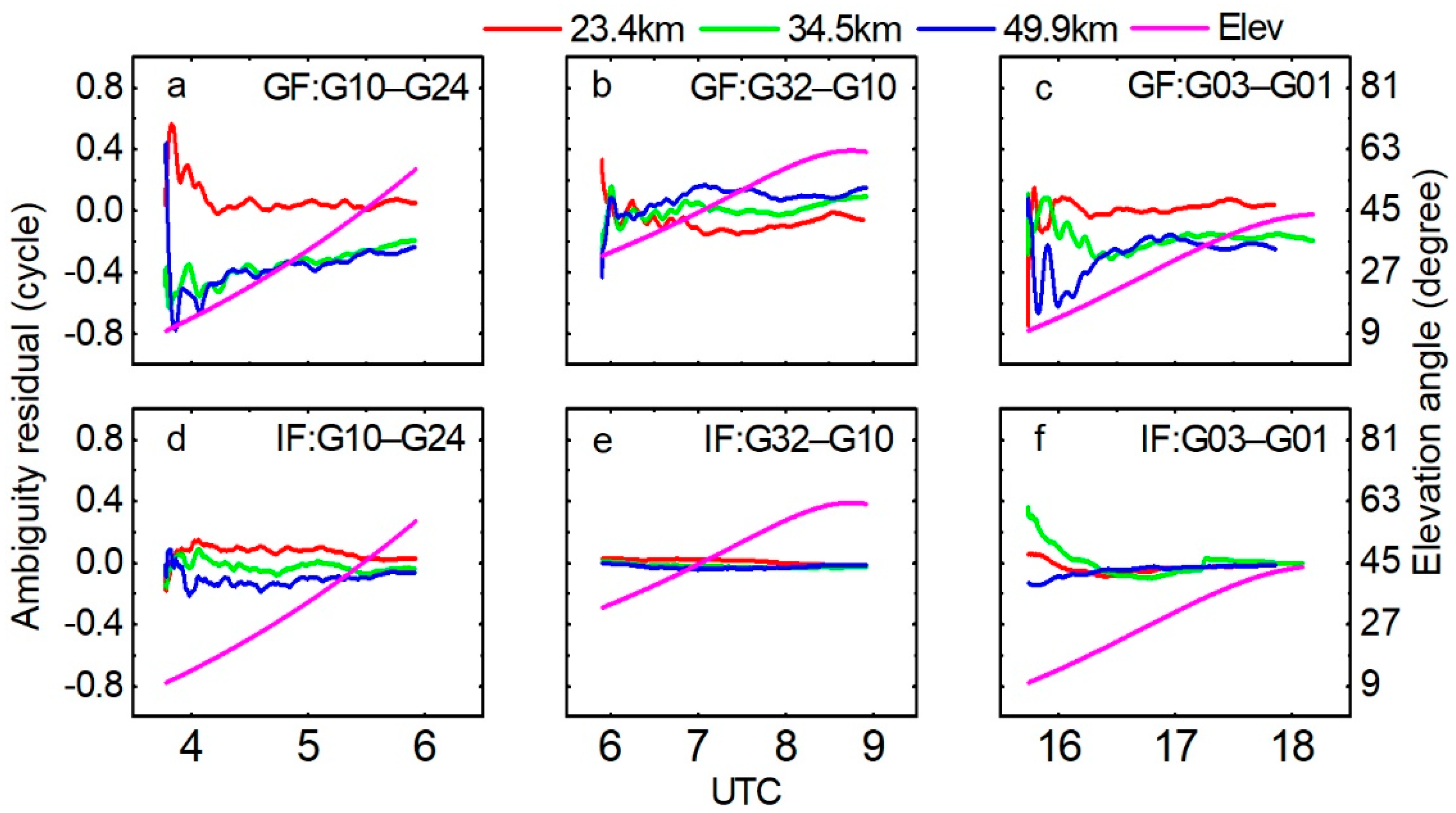
3.2. GPS Data by GF and IF TCAR Methods
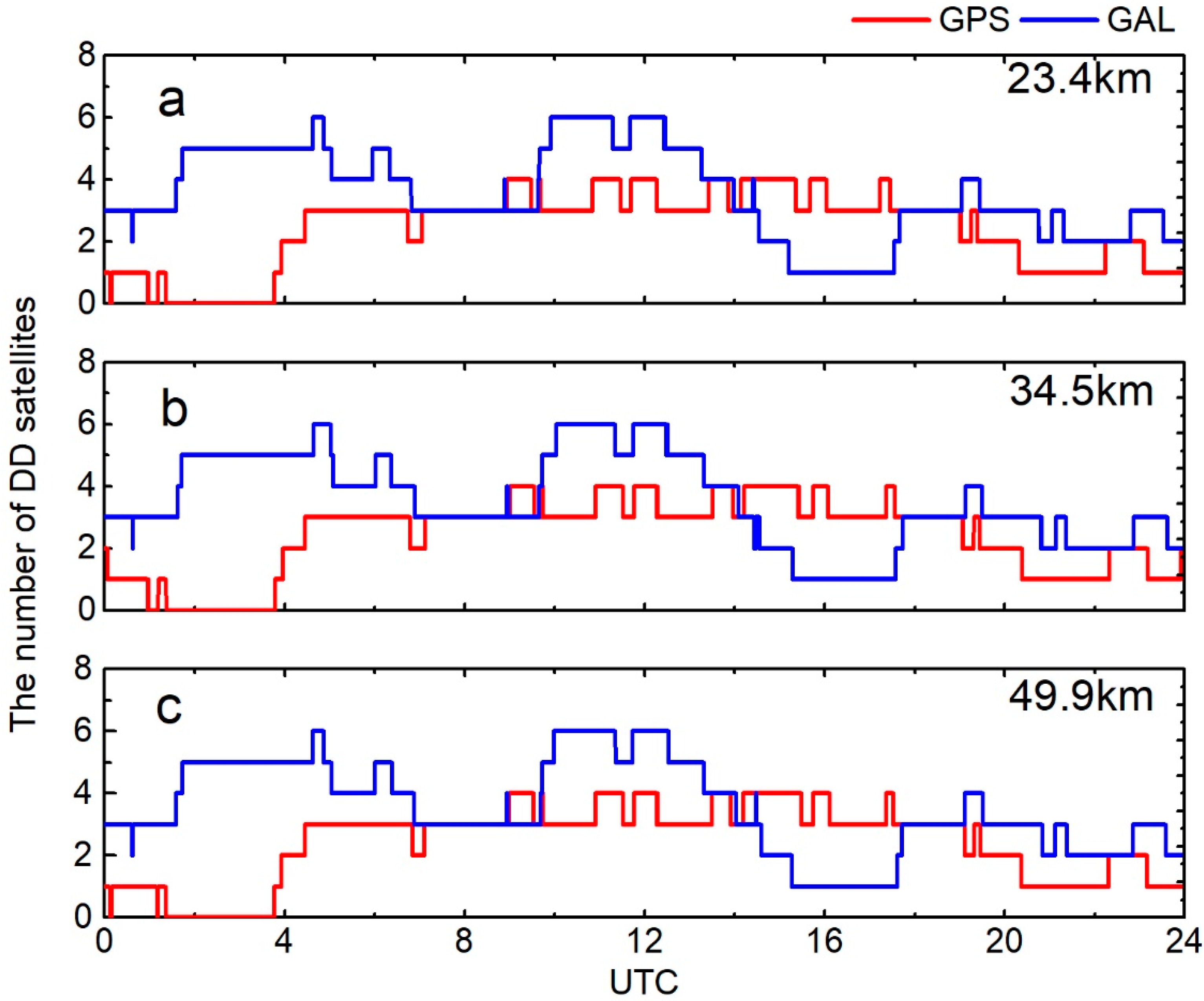
3.3. GPS and Galileo Data by CIF TCAR Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ESA. Galileo System Test Bed Version 1 Experimentation Is Now Complete. 2005. Available online: http://www.esa.int/Our_Activities/Navigation/Galileo_System_Test_Bed_Version_1_experimentation_is_now_complete (accessed on 7 January 2005).
- ESA. Fact Sheet: Galileo In-Orbit Validation. 2013. Available online: http://download.esa.int/docs/Galileo_IOV_Launch/Galileo_IOV_factsheet_2012.pdf (accessed on 15 February 2013).
- ESA. Galileo Satellite Recovered and Transmitting Navigation Signals. 2014. Available online: http://www.esa.int/Our_Activities/Navigation/Galileo_satellite_recovered_and_transmitting_navigation_signals (accessed on 3 December 2014).
- Paziewski, J.; Sieradzki, R.; Wielgosz, P. On the Applicability of Galileo FOC Satellites with Incorrect Highly Eccentric Orbits: An Evaluation of Instantaneous Medium-Range Positioning. Remote Sens. 2018, 10, 208. [Google Scholar] [CrossRef]
- Robustelli, U.; Pugliano, G. Galileo Single Point Positioning Assessment Including FOC Satellites in Eccentric Orbits. Remote Sens. 2019, 11, 1555. [Google Scholar] [CrossRef]
- European Union. European GNSS (Galileo) Open Service—Signal in Space Interface Control Document. OS SIS ICD. 2016. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.0.pdf (accessed on 30 November 2015).
- Zaminpardaz, S.; Teunissen, P.J.G. Analysis of Galileo IOV + FOC signals and E5 RTK performance. GPS Solut. 2017, 21, 1855–1870. [Google Scholar] [CrossRef]
- Steigenberger, P.; Montenbruck, O. Galileo status: Orbits, clocks, and positioning. GPS Solut. 2016, 21, 319–331. [Google Scholar] [CrossRef]
- Cai, C.; Luo, X.; Liu, Z.; Xiao, Q. Galileo Signal and Positioning Performance Analysis Based on Four IOV Satellites. J. Navig. 2014, 67, 810–824. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D.; Angrisano, A.; Gaglione, S.; Fortuny-Guasch, J. A Galileo IOV assessment: Measurement and position domain. GPS Solut. 2014, 19, 187–199. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G.; Khodabandeh, A. Galileo IOV RTK positioning: Standalone and combined with GPS. Surv. Rev. 2013, 46, 267–277. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Tian, Y.; Sui, L.; Xiao, G.; Zhao, D.; Tian, Y. Analysis of Galileo/BDS/GPS signals and RTK performance. GPS Solut. 2019, 23, 37. [Google Scholar] [CrossRef]
- Luo, X.; Schaufler, S.; Branzanti, M.; Chen, J. Assessing the benefits of Galileo to high-precision GNSS positioning—RTK, PPP and post-processing. Adv. Space Res. 2020. [Google Scholar] [CrossRef]
- Forssell, B.; Martinneira, M.; Harrisz, R.A. Carrier phase ambiguity resolution in GNSS-2. In Proceedings of the ION GPS-97, Kansas City, MO, USA, 16–19 September 1997; pp. 1727–1736. [Google Scholar]
- Zhang, W.; Cannon, M.E.; Julien, O.; Alves, P. Investigation of combined GPS/GALILEO cascading ambiguity resolution schemes. In Proceedings of the ION GPS/GNSS 2003, Portland, OR, USA, 9–12 September 2003; pp. 2599–2610. [Google Scholar]
- Julien, O.; Cannon, M.E.; Alves, P.; Lachapelle, G. Triple frequency ambiguity resolution using GPS/Galileo. J. Navig. 2004, 2, 51–56. [Google Scholar]
- Li, B.; Feng, Y.; Shen, Y. Three carrier ambiguity resolution: Distance-independent performance demonstrated using semi-generated triple frequency GPS signals. GPS Solut. 2009, 14, 177–184. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Zhang, X. Three frequency GNSS navigation prospect demonstrated with semi-simulated data. Adv. Space Res. 2013, 51, 1175–1185. [Google Scholar] [CrossRef]
- Li, B.; Feng, Y.; Gao, W.; Li, Z.; Bofeng, L.; Yanming, F.; Weiguang, G.; Zhen, L. Real-time kinematic positioning over long baselines using triple-frequency BeiDou signals. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 3254–3269. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Z.; Tan, Y. ERTK: Extra-wide-lane RTK of triple-frequency GNSS signals. J. Geod. 2017, 91, 1031–1047. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Feng, Y.; Li, B. A benefit of multiple carrier GNSS signals: Regional scale network-based RTK with doubled inter-station distances. J. Spat. Sci. 2008, 53, 135–147. [Google Scholar] [CrossRef]
- Feng, Y.; Rizos, C. Network-based geometry-free three carrier ambiguity resolution and phase bias calibration. GPS Solut. 2008, 13, 43–56. [Google Scholar] [CrossRef]
- Tang, W.; Shen, M.; Deng, C.; Cui, J.; Yang, J. Network-based triple-frequency carrier phase ambiguity resolution between reference stations using BDS data for long baselines. GPS Solut. 2018, 22, 73. [Google Scholar] [CrossRef]
- Feng, Y.; Rizos, C. Three carrier approaches for future global, regional and local GNSS positioning services: Concepts and performance perspectives. In Proceedings of the ION GNSS 2005, Long Beach, CA, USA, 13–16 September 2005; pp. 2277–2278. [Google Scholar]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geod. 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Blewitt, G. An Automatic Editing Algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the Third International Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982; pp. 1213–1231. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 373–386. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with GPS using TI 4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 403–412. [Google Scholar]
- Feng, Y.; Li, B. Wide area real time kinematic decimetre positioning with multiple carrier GNSS signals. Sci. China Earth Sci. 2010, 53, 731–740. [Google Scholar] [CrossRef]
- Hopfield, H.S. Two-quartic tropospheric refractivity profile for correcting satellite data. J. Geophys. Res. Space Phys. 1969, 74, 4487–4499. [Google Scholar] [CrossRef]
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. Space Phys. 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Jing-Nan, L.; Mao-Rong, G. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | |||||||
|---|---|---|---|---|---|---|---|
| (m) | |||||||
| EWL | (0, 1, −1) | 9.7684 | −1.7477 | 54.9232 | 0.0669 | 0.0913 | 0.1889 |
| (1, −6, 5) | 1.3955 | −0.9889 | 44.0471 | 0.3483 | 0.4273 | 0.7922 | |
| (1, −5, 4) | 1.2211 | −1.0838 | 31.8257 | 0.3187 | 0.4442 | 0.9430 | |
| (1, −4, 3) | 1.0854 | −1.1576 | 22.3921 | 0.3012 | 0.4783 | 1.1056 | |
| WL | (1, −1, 0) | 0.8140 | −1.3051 | 5.3892 | 0.3345 | 0.6505 | 1.6279 |
| (1, 0, −1) | 0.7514 | −1.3391 | 4.9282 | 0.3700 | 0.7220 | 1.8080 | |
| Method | E09–E04 | E05–E04 | E24–E04 | |||
|---|---|---|---|---|---|---|
| RMS (cycle) | T (s) | RMS (cycle) | T (s) | RMS (cycle) | T (s) | |
| GF TCAR | 0.0497 | 57.3 | 0.0733 | 568.7 | 0.0610 | 1308.0 |
| IF TCAR | 0.0298 | 175.3 | 0.0688 | 562.3 | 0.0456 | 468.1 |
| Method | E09–E04 | E05–E04 | E24–E04 | |||
|---|---|---|---|---|---|---|
| RMS (cycle) | T (s) | RMS (cycle) | T (s) | RMS (cycle) | T (s) | |
| GF TCAR | 0.1938 | 933.3 | 0.4693 | +∞ | 0.3683 | |
| IF TCAR | 0.0389 | 34.0 | 0.1881 | 1456.1 | 0.0541 | 718.3 |
| Method | G10–G24 | G32–G10 | G03–G01 | |||
|---|---|---|---|---|---|---|
| RMS (cycle) | T (s) | RMS (cycle) | T (s) | RMS (cycle) | T (s) | |
| GF TCAR | 0.0442 | 366.3 | 0.0252 | 70.0 | 0.0464 | 147.0 |
| IF TCAR | 0.0233 | 4.0 | 0.0122 | 1.0 | 0.0180 | 45.3 |
| Method | G10–G24 | G32–G10 | G03–G01 | |||
|---|---|---|---|---|---|---|
| RMS (cycle) | T (s) | RMS (cycle) | T (s) | RMS (cycle) | T (s) | |
| GF TCAR | 0.2973 | 5136.7 | 0.0847 | 80.0 | 0.1861 | 2483.7 |
| IF TCAR | 0.0785 | 252.3 | 0.0236 | 1.0 | 0.0629 | 200.5 |
| System | G09–G27 | E03–E24 | ||
|---|---|---|---|---|
| RMS (cycle) | T (s) | RMS (cycle) | T (s) | |
| GPS | 0.0983 | 230.3 | ||
| Galileo | 0.2509 | 2039.3 | ||
| GPS + Galileo | 0.0864 | 42.3 | 0.1729 | 1785.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Shen, M.; Yang, L.; Deng, C.; Tang, W.; Zou, X.; Wang, Y.; Zhang, Y. Initial Assessment of Galileo Triple-Frequency Ambiguity Resolution between Reference Stations in the Hong Kong Area. Remote Sens. 2021, 13, 778. https://doi.org/10.3390/rs13040778
Li Y, Shen M, Yang L, Deng C, Tang W, Zou X, Wang Y, Zhang Y. Initial Assessment of Galileo Triple-Frequency Ambiguity Resolution between Reference Stations in the Hong Kong Area. Remote Sensing. 2021; 13(4):778. https://doi.org/10.3390/rs13040778
Chicago/Turabian StyleLi, Yangyang, Mingxing Shen, Lei Yang, Chenlong Deng, Weiming Tang, Xuan Zou, Yawei Wang, and Yongfeng Zhang. 2021. "Initial Assessment of Galileo Triple-Frequency Ambiguity Resolution between Reference Stations in the Hong Kong Area" Remote Sensing 13, no. 4: 778. https://doi.org/10.3390/rs13040778
APA StyleLi, Y., Shen, M., Yang, L., Deng, C., Tang, W., Zou, X., Wang, Y., & Zhang, Y. (2021). Initial Assessment of Galileo Triple-Frequency Ambiguity Resolution between Reference Stations in the Hong Kong Area. Remote Sensing, 13(4), 778. https://doi.org/10.3390/rs13040778