1. Introduction
Tropical savannas cover over 12.5% of global land area [
1]. In the northern parts of Australia, the tropical savanna landscape is characterised by a large number of termite mounds. Termites interact with local site conditions and provide valuable ecosystem services: their mounds are hypothesized to increase resilience to climate change [
2]; they are considered to play a meaningful role in savanna restoration [
3]; and they are fairly resistant to land use change [
4]. Mound building termites recycle nutrients and decompose organic matter [
5], which generally leads to the higher local fertility of the soil [
6]. Termite mounds also affect infiltration and runoff directly by increasing the local soil hydraulic conductivity and are even considered as an indicator for groundwater presence [
7]. Both the increase in hydraulic conductivity and the altered soil properties lead to a shift in plant and tree species composition [
6,
8]. This results in a heterogeneous landscape with small fertility islands, which improves biodiversity, facilitates browsing and grazing by animals [
9] and increases robustness against a changing climate [
2]. Termite mounds are also responsible for approximately 4% of the total global methane flux [
10,
11], and its emissions are related to termite mound volume [
12]. In addition, a complex interaction occurs between the microtopography and hillslope hydrogeomorphology in savanna landscapes [
13]. The termite mound distribution has been shown to be a suitable proxy for hydrogeomorphic processes since it is affected by mean annual precipitation, geology and local hillslope morphology [
14]. These three factors have historically shaped the distribution of clays, an important element in mound building. Levick et al. (2010) [
13] suggested that a changing climate will affect the hydrogeomorphic dynamics, and these patterns may emerge in the termite mound distribution signal. With the global increase of wildfires in mind, there is also a lack of research towards the interaction between fire and termite mounds [
15].
Termites are true ecosystem engineers [
16], and as such, the collection of large data sets that enable the detection, mapping and monitoring of these mounds is of great value for managing the landscape under changing climate and land use. However, large data sets of the spatial distribution of termite mounds are still rare, especially in savanna woodlands. Existing data sets are based on sparse aerial laser scanning (ALS) data or high resolution satellite data. Both lack detailed 3D information, which is useful to reliably detect termite mounds in savannas with a dense understory. In addition, more detailed data sets that are manually collected are often constrained by limited spatial coverage, e.g., [
14,
17,
18]. Unmanned aerial vehicles (UAVs), equipped with laser scanning technology, could close this gap, because UAVs are able to collect highly detailed 3D information from large areas. Moreover, the flexibility and limited regulation of UAVs compared to aerial acquisitions from aeroplanes makes them very attractive to use. Because the use of UAVs for remote sensing is a relatively new advancement, it nevertheless comes with its challenges, especially concerning data management, which often lacks standardized protocols [
19]. Other current limitations of UAVs are the limited battery life and the limited carry-on weight. Laser scanning, also known as light detection and ranging (LiDAR), is one of the most widely adopted techniques to capture the Earth’s surface in 3D. LiDAR is an active remote sensing technique in which 3D point clouds are generated by emitting laser beams to interact with the object of interest. By measuring the time of return, the distance between the object and the transmitter is calculated. Laser scanning can be conducted from a variety of platforms, including aeroplanes and UAVs, or from ground positions. The captured point density and the level of occlusion both limit the quality and detail of the recorded area, and these factors often need to be traded off when considering UAV or ground-based LiDAR collection. UAV-laser scanning (UAV-LS) has already been shown to be successful in many fields of ecology. Due to its relatively uniform ground coverage, high point density and its ability to penetrate through vegetation, it is currently successfully used to estimate, e.g., riverscape topography [
20], shoreline changes [
21] and forest structural metrics [
22,
23,
24].
The aim of this study is to develop and assess a methodology to identify termite mounds in a woodland savanna ecosystem, using 3D point clouds from a UAV-LS. Specifically, we investigate whether: (1) termite mounds are detectable from a UAV-LS in a savanna woodland landscape with understorey vegetation and (2) whether UAV-LS point clouds can be used to accurately measure 3D termite mound information (e.g., height and volume).
4. Discussion
We present a termite mound detection and morphological characterisation algorithm for UAV-LS point clouds that labels termite mounds (>50 cm) semi-automatically. This is an important step forward if many termite mounds need to be detected over large areas. A couple of smaller mounds were also detected, but since none of these were present in our benchmark data set extent, their rate of detection was hard to estimate in the UAV-LS data set. After a visual inspection, even smaller termite mounds were still visible in the UAV-LS data, which suggests there is still room to improve the detection rate from UAV-LS. The flight speed and its resulting point density had a significant impact on the detection rate. The UAV-LS (HR) performed slightly better in mound detection, since certain mounds could not be identified in the LR data set due to local low point densities. An improved flight plan that focuses on a homogeneous distribution of point density might close these gaps, but it will be a trade-off for area. Other detection uncertainties include the misidentification of stems, or the lack of detection when mounds are built almost symmetrically around trees with tapering stems. We cannot expect this nuance to be visible in the UAV-LS data.
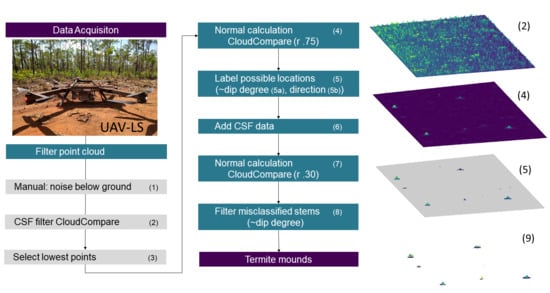
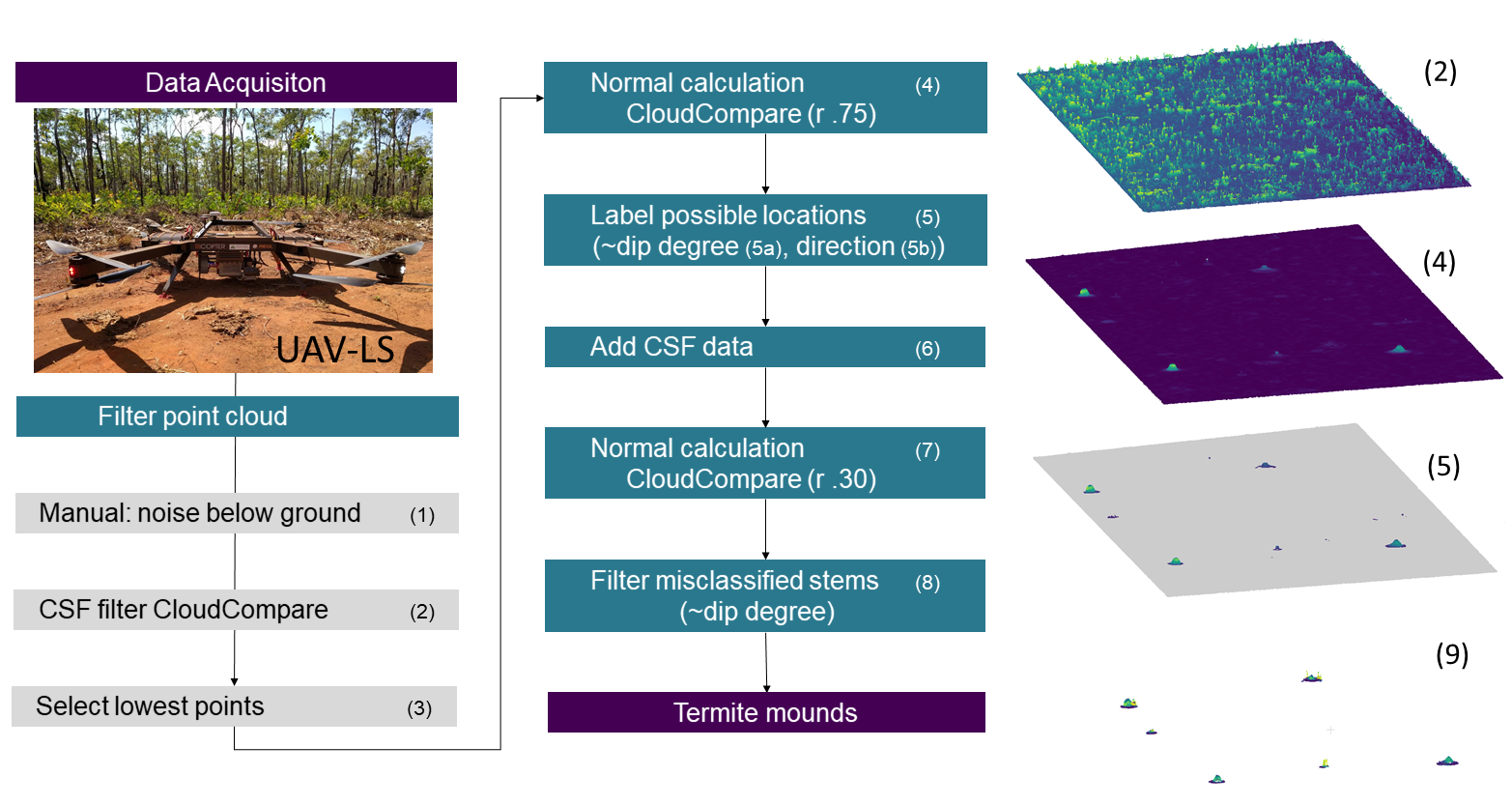
In the first part of the detection algorithm, we created our own ground filtering algorithm, since established algorithms (e.g., the ground filtering algorithm of LAStools, called “LASground”) did not retain the top part of termite mounds. These algorithms also form the basis for digital terrain models (DTMs) and digital surface models (DSMs), which is why we did not use these techniques. The ground filtering that we proposed is rather “conservative” in a way that only the lowest points are kept in a search window of 30 NN in the XY plane. This is a very simple and fast method, which is preferential for large data sets, since the data are heavily reduced. The points are subsequently selected as potential mounds only when a clear slope is present in the data. Our approach achieved good results, which we also credited to the multiple return capabilities of the VUX LiDAR sensor. One beam can receive multiple return signals and partially penetrate through soft material such as leaves, which enables it to delineate the ground floor and its mounds with very high precision.
Our detection algorithm was tested on the geometric position of the points and depended on several empirically defined parameters. The algorithm was designed for the type of termite mounds that have a conical shape. However, many of these parameters can be optimised for other geometric termite mound shapes, or could be optimized to work on UAV-LS data with a different point density. Those parameters are the amount of nearest neighbours (NN) used to extract ground points, the thresholds used to identify mounds using the normal calculations and those that determine which clusters are classified as mounds as opposed to tree stems. Not all these parameters will need to be changed if a different data set is used, but if needed, they are easily adjustable. We thus advise users to first run the algorithm on a small subset of the data using the predefined parameters, to visually check the subsequent steps, and if needed, to alter the parameters. Once these are defined, the algorithm can detect termite mounds with no manual intervention.
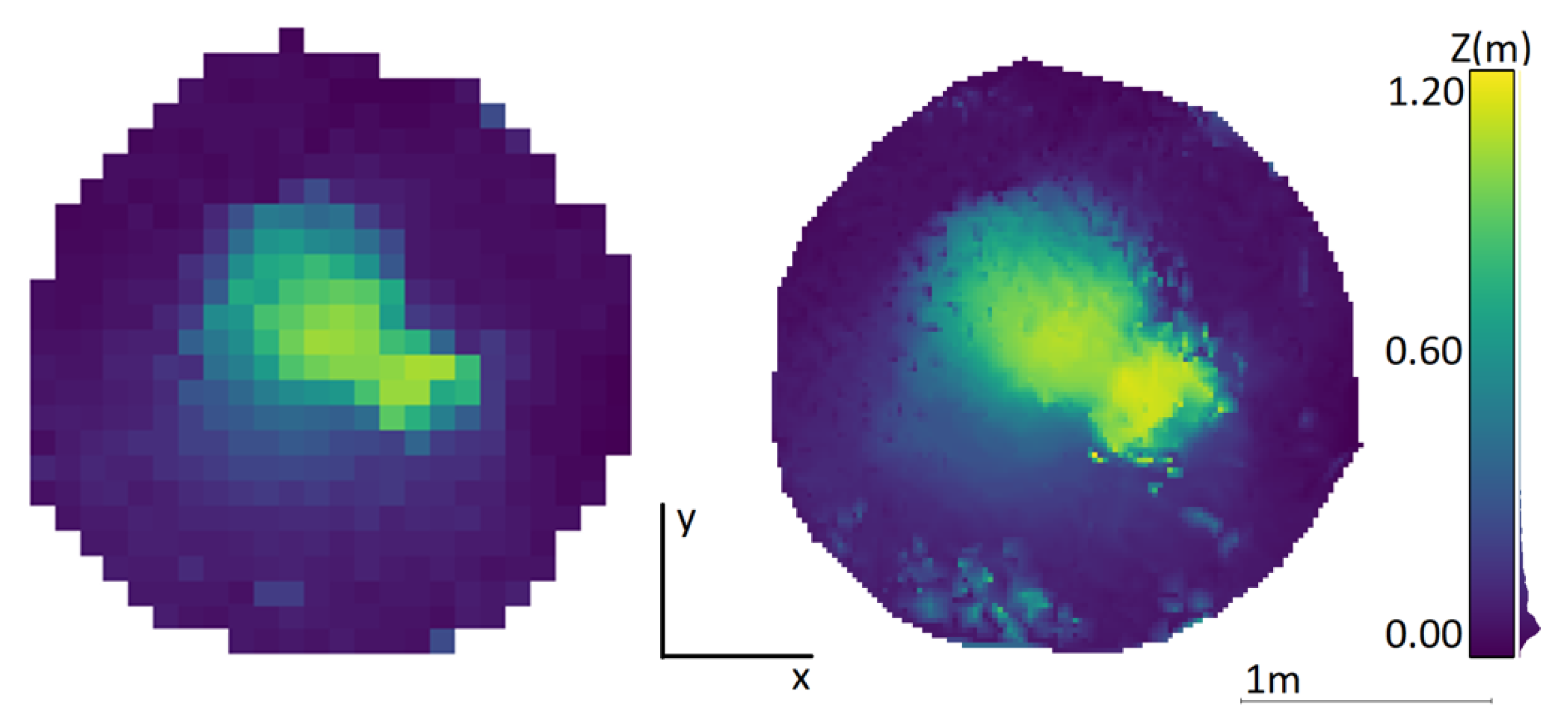
Based on the delineated termite mounds that we derived from the detection algorithm, we were also able to estimate both termite mound height and its volume. Unfortunately, no traditional ground truth data are available, but since TLS is a commonly used method to estimate the volume of (tree) point clouds, with good results, e.g., [
34,
35], we are confident volume errors are in the same, small, error range. For both the Gaussian approach, in which termite mounds are approximated by fitting a Gaussian distribution to the points, and the grid approach, in which the height is derived from a rasterized point cloud, height estimations were better than volume calculations. For HR data, the grid approach performed only slightly better than the Gaussian approach, but once the resolution lowered, it was outperformed by the Gaussian approach. However, not all mounds were appropriately fitted by the Gaussian approach, and a manual inspection to remove outliers was needed. As with height, the quality of fit for the volume estimations significantly lowered with resolution. We are confident that both volume and height estimations can still be improved, if termite mounds are better delineated in the data. Currently, the estimations are affected by adjacent points, not part of the mound. For termite mounds that grew around stems for example, some of its points were included in the calculations. In both the HR and LR data sets, this resulted in over- and under-estimations, and it influenced the optimized parameters. Alternatively, in future research, termite shape might be approximated using other 3D techniques such as convex hulls.
Even when resolution is low and flight lines are sparse, the acquired resolution with the UAV is, obviously, much higher compared to ALS data. For example, the termite data sets of Kruger National Park on which many studies about termite mound distributions are based [
8,
13,
14] was derived from ALS data with a coverage of one laser shot/m
[
36]. Macrotermes mounds are large features (up to 10 m wide and 3 m) and therefore more readily detectable. However, while smaller mounds (>50 cm) were still detected, it is uncertain how many were missed, and field validation for small mounds is rare [
37]. These ALS point densities are in stark contrast with the UAV-LS data, which still obtained an average return of 680 points/m
in the LR data (multiple return scanner). One major limitation of UAVs currently is the limited battery life. the RIEGL RiCOPTER can only effectively map for 15 min with each flight. Especially in remote areas where charging possibilities are limited, this is something to take into consideration. If batteries improve over the coming years, flight time will increase, and data collection will be more time efficient. Another downside is the price tag: commercial state-of-the-art LiDAR scanners remain expensive. Another, less expensive, method to record the 3D surface is structure from motion (SfM). This is a technique in which 2D images are used to create 3D point clouds. Depending on the user’s needs and the site characteristics, SfM can be an adequate alternative for LiDAR, e.g., [
22,
38,
39]. This is however not always the case: in dense forests, for example, SfM cannot sufficiently capture the ground due to high occlusion [
22]. Its applicability for termite mound detection in a savanna woodland landscape with an understorey is thus a scope for future research.
Most importantly, our detection algorithm can be used as a first step in the automatic detection of termite mounds over large areas using UAV-LS data. Once an extensive data set is obtained, covering hundreds of hectares, machine learning techniques can be implemented using a similar approach where geometric features are calculated (e.g., eigenvalues, zenith angles, azimuth angles, etc.) for each point considering neighbouring points in different radii. These sets can be used to train an algorithm to detect mounds, since machine learning techniques currently are of sufficient quality to extract complicated geometric figures from LiDAR data (e.g., to extract lianas from dense tropical forest [
40]). In addition, sensor fusion of LiDAR and spectral sensors might improve the classification accuracy and is part of further research. Our algorithm can also be adopted for other ecosystem applications, for example the detailed characterisation of microtopography.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}