
Assessing the Potential of the DART Model to Discrete Return LiDAR Simulation—Application to Fuel Type Mapping

 ,
,  ,
,  ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
2. Material
2.1. Study Area
2.2. Datasets
2.2.1. ALS Data
2.2.2. Field Data
3. Methods
3.1. Simulation in DART Model
3.2. Processing of ALS-PNOA-Data and Simulated DART Point Clouds
3.3. Accuracy Assessment of DART Simulations
3.4. Fuel Type Classification
4. Results
4.1. Accuracy Assessment of DART Simulations.
4.2. Selection of Simulated LiDAR Metrics for Fuel Model Classification.
4.3. Classification of Forest Fuels
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Metric | Correlation Coefficients 2011 | Correlation Coefficients 2016 | |
|---|---|---|---|
| Canopy height metrics (CHM) | P01 | −0.35 | −0.11 |
| P05 | −0.36 | −0.13 | |
| P10 | −0.31 | −0.13 | |
| P20 | −0.15 | 0.15 | |
| P25 | 0.08 | 0.26 | |
| P30 | 0.21 | 0.38 | |
| P40 | 0.56 | 0.53 | |
| P50 | 0.82 | 0.72 | |
| P60 | 0.89 | 0.84 | |
| P70 | 0.93 | 0.88 | |
| P75 | 0.93 | 0.92 | |
| P80 | 0.93 | 0.91 | |
| P90 | 0.93 | 0.94 | |
| P95 | 0.94 | 0.96 | |
| P99 | 0.93 | 0.97 | |
| Total.ret.count | 0.54 | 0.14 | |
| Elev.min | −0.26 | 0.03 | |
| Elev.max | 0.93 | 0.97 | |
| Elev.mean | 0.93 | 0.92 | |
| Elev.mode | 0.12 | 0.29 | |
| Elev.SQRT.mean.SQ | 0.93 | 0.95 | |
| Elev.CURT.mean.CUBE | 0.93 | 0.96 | |
| First.ret.above.mean | 0.41 | 0.33 | |
| First.ret.above.mode | 0.47 | 0.14 | |
| All.rets.above.mean | 0.41 | 0.34 | |
| All.ret.above.mode | 0.54 | 0.27 | |
| Total.first.ret. | 0.46 | −0.03 | |
| Total.all.ret. | 0.54 | 0.14 | |
| Elev.L1 | 0.93 | 0.92 | |
| Elev.L2 | 0.95 | 0.96 | |
| Elev.L3 | −0.25 | 0.30 | |
| Elev.L4 | 0.13 | 0.52 | |
| Canopy height variability metrics (CHVM) | Elev st.dev. | 0.95 | 0.97 |
| Elev.variance | 0.95 | 0.97 | |
| Elev.CV | −0.25 | 0.35 | |
| Elev.IQ | 0.92 | 0.92 | |
| Elev.skewness | −0.16 | 0.31 | |
| Elev.kurtosis | 0.28 | 0.54 | |
| Elev.AAD | 0.94 | 0.96 | |
| Elev.MAD.median | 0.85 | 0.81 | |
| Elev.MAD.mode | 0.89 | 0.85 | |
| Elev.L.CV | −0.17 | 0.39 | |
| Elev.L.skewness | −0.16 | 0.33 | |
| Elev.L.kurtosis | 0.26 | 0.52 | |
| CRR | −0.25 | 0.02 | |
| Canopy density metrics (CDM) | % first ret. Above 0 | −0.24 | −0.19 |
| % all ret. Above 0 | −0.23 | −0.19 | |
| X.All.ret.above.0/Total.first.ret.100 | −0.25 | −0.13 | |
| First.ret.above.0 | 0.48 | −0.02 | |
| All.ret.above.0 | 0.56 | 0.15 | |
| %.first.ret.above.mean | −0.07 | 0.35 | |
| %.first.ret.above.mode | 0.31 | 0.19 | |
| %.all.ret.above.mean | −0.09 | 0.35 | |
| %.all.ret.above.mode | 0.27 | 0.19 | |
| X.All.ret.above.mean/Total.first.ret.100 | −0.07 | 0.35 | |
| X.All.ret.above.mode/Total.first.ret.100 | 0.41 | 0.24 | |
| total.ret.count 0_0.6 | −0.16 | 0.47 | |
| Prop. 0_0.6 | 0.85 | 0.80 | |
| Mean 0_0.6 | −0.23 | −0.03 | |
| Max 0_0.6 | 0.32 | 0.29 | |
| Mean 0_0.6 | 0.30 | 0.36 | |
| Mode 0_0.6 | 0.05 | −0.04 | |
| Median 0_0.6 | 0.38 | 0.21 | |
| st.dev 0_0.6 | 0.41 | 0.48 | |
| CV 0_0.6 | 0.48 | 0.15 | |
| Skewness 0_0.6 | 0.21 | 0.09 | |
| Kurtosis 0_0.6 | 0.03 | −0.02 | |
| total.ret.count 0.6_2 | 0.44 | 0.49 | |
| Prop. 0.6_2 | 0.47 | 0.56 | |
| Min 0.6_2 | 0.39 | 0.27 | |
| Max 0.6_2 | 0.54 | 0.54 | |
| Mean 0.6_2 | 0.57 | 0.64 | |
| Mode 0.6_2 | 0.59 | 0.37 | |
| Median 0.6_2 | 0.57 | 0.59 | |
| St.dev. 0.6_2 | 0.32 | 0.54 | |
| CV 0.6_2 | 0.14 | 0.38 | |
| Skewness 0.6_2 | 0.07 | 0.13 | |
| Kurtosis 0.6_2 | 0.37 | 0.14 | |
| Total.ret.count 2_4 | 0.85 | 0.78 | |
| Prop. 2_4 | 0.86 | 0.80 | |
| Min 2_4 | 0.56 | 0.43 | |
| Max 2_4 | 0.79 | 0.80 | |
| Mean 2_4 | 0.69 | 0.84 | |
| Mode 2_4 | 0.75 | 0.76 | |
| Median 2_4 | 0.70 | 0.78 | |
| St.dev. 2_4 | 0.60 | 0.69 | |
| CV 2_4 | 0.61 | 0.65 | |
| Skewness 2_4 | 0.71 | 0.47 | |
| Kurtosis 2_4 | 0.75 | 0.67 | |
| total.ret.count above_4 | 0.93 | 0.93 | |
| Prop above_4 | 0.93 | 0.94 | |
| Min above_4 | 0.73 | 0.76 | |
| Max above_4 | 0.90 | 0.94 | |
| Mean above_4 | 0.89 | 0.94 | |
| Mode above_4 | 0.88 | 0.90 | |
| Median above_4 | 0.89 | 0.93 | |
| St.dev. above_4 | 0.88 | 0.94 | |
| CV above_4 | 0.87 | 0.92 | |
| Skewness above_4 | 0.72 | 0.68 | |
| Kurtosis above_4 | 0.82 | 0.76 | |
| Prop. 0_0.5 | 0.85 | 0.79 | |
| Prop.0.5_1.00 | 0.11 | 0.33 | |
| Prop.1.00_1.50 | 0.34 | 0.60 | |
| Prop.1.50_2.00 | 0.64 | 0.56 | |
| Prop.2.00_2.50 | 0.67 | 0.72 | |
| Prop.2.50_3.00 | 0.83 | 0.70 | |
| Prop.3.00_3.50 | 0.85 | 0.80 | |
| Prop.3.50_4.00 | 0.85 | 0.80 | |
| Prop.4.00_4.50 | 0.87 | 0.81 | |
| Prop.4.50_5.00 | 0.84 | 0.88 | |
| Prop. Above_5 | 0.89 | 0.92 | |
| Diversity indices (DI) | D0 | NA | NA |
| D1 | 0.17 | 0.50 | |
| D2 | −0.17 | 0.33 | |
| D3 | −0.38 | 0.22 | |
| D4 | −0.44 | 0.11 | |
| D5 | −0.44 | 0.06 | |
| D6 | −0.37 | −0.05 | |
| D7 | −0.34 | −0.12 | |
| D8 | −0.29 | −0.14 | |
| D9 | −0.30 | −0.16 | |
| Lhdi | 0.85 | 0.83 | |
| Lhei | 0.76 | 0.75 | |
| Rumple | 0.94 | 0.95 | |
| Rumple.0_0.6 | 0.40 | 0.41 | |
| Rumple.0.6_2 | 0.21 | 0.10 | |
| Rumple.2_4 | 0.58 | 0.41 | |
| Rumple.4_40 | 0.75 | 0.72 | |
| Year | Metrics | Approach | Fitting phase | Validation |
|---|---|---|---|---|
| 2011 | P30+ Elev.CV + Prop. 2.5_3 + Prop. above_4 | seqrep and Exhaustive | 0.68 | 0.54 |
| P30+ Elev. L.CV+ % first ret. Above mean | Forward | 0.62 | 0.48 | |
| P30+ Elev. L.CV+ Prop 0.5_1+ Mean above_4 | Backward | 0.65 | 0.59 | |
| 2016 | P95+ P99+ Mean 0_0.6+ Prop. 2_4 | seqrep | 0.71 | 0.65 |
| P60+ Elev. L4+ Median 0_0.6+ Prop. 2_4 | Exhaustive | 0.71 | 0.65 | |
| Elev. SQRT mean SQ + Elev. CUR mean CUBE + Mean 0_0.6 + Max. above_4 | Forward | 0.68 | 0.68 | |
| Elev. max + Mean 0_0.6 + Mode 0_0.6 + Prop. 2_4 | Backward | 0.73 | 0.65 |
References
- Merrill, D.F.; Alexander, M.E. Glossary of Forest Fire Management Terms; National Research Council of Canada, Committee for Forest Fire Management: Ottawa, ON, Canada, 1987. [Google Scholar]
- González-De Vega, S.; De las Heras, J.; Moya, D. Resilience of Mediterranean terrestrial ecosystems and fire severity in semiarid areas: Responses of Aleppo pine forests in the short, mid and long term. Sci. Total Environ. 2016, 573, 1171–1177. [Google Scholar] [CrossRef] [PubMed]
- Chuvieco, E. Earth Observation of Wildland Fires in Mediterranean Ecosystems; Springer: Alcalá de Henares, Spain, 2009; p. 257. [Google Scholar]
- Vicente-Serrano, S.M.; Lasanta Martínez, T.; Cuadrat, J.M. Transformaciones en el paisaje del Pirineo como consecuencia del abandono de las actividades económicas tradicionales. Pirineos 2000, 155, 111–133. [Google Scholar] [CrossRef]
- Arroyo, L.A.; Pascual, C.; Manzanera, J.A. Fire models and methods to map fuel types: The role of remote sensing. Forest Ecol. Manag. 2008, 256, 1239–1252. [Google Scholar] [CrossRef]
- Gajardo, J.; García, M.; Riaño, D. Applications of Airborne Laser Scanning in Forest Fuel Assessment and Fire Prevention. In Forestry Applications of Airborne Laser Scanning Concepts and Case Studies; Maltamo, M., Naesset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 439–462. [Google Scholar]
- Burgan, R.E.; Klaver, R.W.; Klarer, J.M. Fuel models and fire potential from satellite and surface observations. Int. J. Wildland Fire 1998, 8, 159–170. [Google Scholar] [CrossRef]
- Riaño, D.; Chuvieco, E.; Salas, J.; Palacios-Orueta, A.; Bastarrica, A. Generation of Fuel Type Maps from Landsat TM Images and Ancillary Data in Mediterranean Ecosystems. Can. J. For. Res. 2002, 32, 1301–1315. [Google Scholar]
- Jia, G.J.; Burke, I.C.; Goetz, A.F.H.; Kaufmann, M.R.; Kindel, B.C. Assessing Spatial Patterns of Forest Fuel Using AVIRIS Data. Remote Sens. Environ. 2006, 102, 318–327. [Google Scholar] [CrossRef]
- Lasaponara, R.; Lanorte, A.; Pignatti, S. Characterization and Mapping of Fuel Types for the Mediterranean Ecosystems of Pollino National Park in Southern Italy by Using Hyperspectral MIVIS Data. Earth Interact 2006, 10, 1–10. [Google Scholar] [CrossRef]
- García, M.; Popescu, S.; Riaño, D.; Zhao, K.; Neuenschwander, A.; Agca, M.; Chuvieco, E. Characterization of Canopy Fuels Using ICESat/GLAS Data. Remote Sens. Environ. 2012, 123, 81–89. [Google Scholar]
- Hermosilla, T.; Ruiz, L.A.; Kazakova, A.N.; Coops, N.C.; Moskal, L.M. Estimation of Forest Structure and Canopy Fuel Parameters from Small-Footprint Full-Waveform LiDAR Data. Int. J. Wildland Fire 2014, 23, 224–233. [Google Scholar] [CrossRef]
- Huesca, M.; Riaño, D.; Ustin, S.L. Spectral Mapping Methods Applied to LiDAR Data: Application to Fuel Type Mapping. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 159–168. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Salas, F.J.; Danson, M. Multispectral and LiDAR Data Fusion for Fuel Type Mapping Using Support Vector Machine and Decision Rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and Imagery for Estimating Forest Canopy Fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Jakubowksi, M.K.; Guo, Q.; Collins, B.; Stephens, S.; Kelly, M. Predicting Surface Fuel Models and Fuel Metrics Using LiDAR and CIR Imagery in a Dense, Mountainous Forest. Photogramm. Eng. Remote Sens. 2013, 79, 37–49. [Google Scholar] [CrossRef]
- Marino, E.; Ranz, P.; Tomé, J.L.; Noriega, M.A.; Esteban, J.; Madrigal, J. Generation of High-Resolution Fuel Model Maps from Discrete Airborne Laser Scanner and Landsat-8 OLI: A Low-Cost and Highly Updated Methodology for Large Areas. Remote Sens. Environ. 2016, 187, 267–280. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.; Stripling, C.; Spencer, T. Mapping Surface Fuel Models Using Lidar and Multispectral Data Fusion for Fire Behavior. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Domingo, D.; de la Riva, J.; Lamelas, M.T.; García-Martín, A.; Ibarra, P.; Echeverría, M.; Hoffrén, R. Fuel type classification using airborne laser scanning and Sentinel 2 data in mediterranean forest affected by wildfires. Remote Sens. 2020, 12, 3660. [Google Scholar] [CrossRef]
- Maltamo, M.; Naesset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning Concepts and Case Studies; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar Remote Sensing for Ecosystem Studies. BioScience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Vosselman, G.; Maas, H.-G. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Dunbeath, UK, 2010; p. 320. [Google Scholar]
- Gómez, C.; Alejandro, P.; Hermosilla, T.; Montes, T.; Pascual, C.; Ruiz, L.A.; Álvarez-Taboada, F.; Tanase, M.A.; Valbuena, R. Remote sensing for the Spanish forests in the 21st century: A review of advances, needs, and opportunities. Forest Syst. 2019, 28, e00R1. [Google Scholar] [CrossRef]
- Lamelas, M.T.; Riaño, D.; Ustin, S.L. A LiDAR signature library simulated from 3-dimensional Discrete Anisotropic Radiative Transfer (DART) model to classify fuel types using spectral matching algorithms. GIScience Remote Sens. 2019, 56, 988–1023. [Google Scholar] [CrossRef]
- Roberts, O.; Bunting, P.; Hardy, A.; McInerney, D. Sensitivity Analysis of the DART Model for Forest Mensuration with Airborne Laser Scanning. Remote Sens. 2020, 12, 247. [Google Scholar] [CrossRef]
- García, M.; North, P.; Viana-Soto, A.; Stavros, N.E.; Rosette, J.; Martín, M.P.; Franquesa, M.; González-Cascón, R.; Riaño, D.; Becerra, J.; et al. Evaluating the potential of LiDAR data for fire damage assessment: A radiative transfer model approach. Remote Sens. Environ. 2020, 247, 111893. [Google Scholar] [CrossRef]
- North, P.R.J. Three-dimensional forest light interaction model using a Monte Carlo method. IEEE Trans. Geosci. Remote Sens. 1996, 34, 946–956. [Google Scholar] [CrossRef]
- Gastellu-Etchegorry, J.P.; Yin, T.; Lauret, N.; Grau, E.; Rubio, J.; Cook, B.D.; Morton, D.C.; Sun, G. Simulation of satellite, airborne and terrestrial LiDAR with DART (I): Waveform simulation with quasi-Monte Carlo ray tracing. Remote Sens. Environ. 2016, 184, 418–435. [Google Scholar] [CrossRef]
- Rosette, J.; North, P.R.; Rubio-Gil, J.; Cook, B.; Los, S.; Suarez, J.; Sun, G.; Ranson, J.; Blair, J.B. Evaluating prospects for improved forest parameter retrieval from satellite LiDAR using a physically-based radiative transfer model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 45–53. [Google Scholar] [CrossRef]
- Montesano, P.; Rosette, J.; Sun, G.; North, P.; Nelson, R.; Dubayah, R.; Ranson, K.; Kharuk, V. The uncertainty of biomass estimates from modeled ICESat-2 returns across a boreal forest gradient. Remote Sens. Environ. 2015, 158, 95–109. [Google Scholar] [CrossRef]
- Yin, T.; Gastellu-Etchegorry, J.P.; Norford, L.K. Recent Advances of Modeling Lidar Data using Dart and Radiometric Calibration Coefficient from LVIS Waveforms Comparison. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1461–1464. [Google Scholar]
- Rosette, J.; Suárez, J.; Nelson, R.; Los, S.; Cook, B.; North, P. Lidar Remote Sensing for Biomass Assessment. In Remote Sensing of Biomass: Principles and Applications; Fatoyinbo, T., Ed.; InTech: Rijeka, Croatia, 2012; pp. 3–26. [Google Scholar]
- Montealegre, A.L.; Lamelas, M.T.; García-Martín, A.; de la Riva, J.; Escribano, F. Using low-density discrete Airborne Laser Scanning data to assess the potential carbon dioxide emission in case of a fire event in a Mediterranean pine forest. GIScience Remote Sens. 2017, 54, 721–740. [Google Scholar] [CrossRef]
- MFE50. Mapa Forestal de España a Escala 1:50.000. Monisterio de la Transición ecológica y el Reto Demográfico. Available online: https://www.miteco.gob.es/es/biodiversidad/servicios/banco-datos-naturaleza/informacion-disponible/mfe50.aspx (accessed on 15 July 2020).
- Vicente-Serrano, S.M.; Lasanta, T.; Gracia, C. Aridification determines changes in forest growth in Pinus halepensis forests under semiarid Mediterranean climate conditions. Agric. For. Meteorol. 2010, 150, 614–628. [Google Scholar] [CrossRef]
- Prometheus. Management Techniques for Optimization of Suppression and Minimization of Wildfire Effects. System Validation. European Commission, DG XII, ENVIR & CLIMATE, Contract Number ENV4-CT98-0716; European Commission: Luxembourg, 1999. [Google Scholar]
- Milton, E.J. Review article principles of field spectroscopy. Remote Sens. 1987, 8, 1807–1827. [Google Scholar] [CrossRef]
- McCoy, R.M. Field Methods in Remote Sensing; Guilford Press: New York, NY, USA, 2005; pp. 42–58. [Google Scholar]
- Condés, S.; Sterba, H. Derivation of compatible crown width equations for some important tree species of Spain. For. Ecol. Manag. 2005, 217, 203–218. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F. S2ToolBox Level 2 Products: LAI, FAPAR, FCOVER. Available online: http://step.esa.int/docs/extra/ATBD_S2ToolBox_L2B_V1.1.pdf (accessed on 11 September 2020).
- Rosero-Vlasova, O.; Pérez-Cabello, F.; Montorio Llovería, R.; Vlassova, L. Assessment of laboratory VIS-NIR-SWIR setups with different spectroscopy accessories for characterisation of soils from wildfire burns. Biosyst. Eng. 2016, 152, 51–67. [Google Scholar]
- Evans, J.S.; Hudak, A.T. A Multiscale Curvature Algorithm for Classifying Discrete Return LiDAR in Forested Environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; de la Riva, J. A comparison of open source LiDAR filtering algorithms in a Mediterranean forest environment. IEEE J. Select. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef]
- Renslow, M. Manual of Airborne Topographic Lidar; The American Society for Photogrammetry and Remote Sensing: Bethesda, MA, USA, 2013. [Google Scholar]
- Montealegre, A.L.; Lamelas, M.T.; de la Riva, J. Interpolation Routines Assessment in ALS-Derived Digital Elevation Models for Forestry Applications. Remote Sens. 2015, 7, 8631–8654. [Google Scholar] [CrossRef]
- McGaughey, R. FUSION/LDV: Software for LIDAR Data Analysis and Visualization; US Department of Agriculture, Forest Service, Pacific Northwest Research Station: Washington, DC, USA, 2009.
- Listopad, C.M.C.S.; Masters, R.E.; Drake, J.; Weishampel, J.; Branquinho, C. Structural diversity indices based on airborne LiDAR as ecological indicators for managing highly dynamic landscapes. Ecol. Indic. 2015, 57, 268–279. [Google Scholar] [CrossRef]
- Kane, V.R.; Bakker, J.D.; McGaughey, R.J.; Lutz, J.A.; Gersonde, R.F.; Franklin, J.F. Examining conifer canopy structural complexity across forest ages and elevations with LiDAR data. Can. J. For. Res. 2010, 40, 774–787. [Google Scholar] [CrossRef]
- Anderson, D.R.; Sweeney, D.J.; Williams, T.A. Estadística Para Administración y Economía; International Thomson: Santa Fe, México, 2001; ISBN 970-686-051-7. [Google Scholar]
- Domingo, D.; Alonso, R.; Lamelas, M.T.; Montealegre, A.L.; Rodríguez, F.; de la Riva, J. Temporal transferability of pine forest attributes modeling using low-density airborne laser scanning data. Remote Sens. 2019, 11, 261. [Google Scholar] [CrossRef]
- Miller, A.J. Subset Selection in Regression. In Monographs on Statistics and Applied Probability 95; Isham, V., Keiding, T., Louis, N., Tibshirani, R.R., Tong, H., Eds.; Chapman & Hall/CRC: New York, NY, USA, 2002; p. 256. Available online: https://ncss-wpengine.netdna-ssl.com/wp-content/themes/ncss/pdf/Procedures/NCSS/Subset_Selection_in_Multiple_Regression.pdf (accessed on 16 October 2019).
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Chuvieco, E. Teledetección Ambiental. La Observación de la Tierra Desde el Espacio; Ariel Ciencia: Barcelona, Spain, 2010. [Google Scholar]
- Chirici, G.; Scotti, R.; Montaghi, A.; Barbati, A.; Cartisano, R.; Lopez, G.; Marchetti, M.; Mcroberts, R.E.; Olsson, H.; Corona, P. Stochastic gradient boosting classification trees for forest fuel types mapping through airborne laser scanning and IRS LISS-III imagery. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 87–97. [Google Scholar] [CrossRef]
- Kristensen, T.; Næsset, E.; Ohlson, M.; Bolstad, P.V.; Kolka, R. Mapping Above- and Below-Ground Carbon Pools in Boreal Forests: The Case for Airborne Lidar. PLoS ONE 2015, 10, e0138450. [Google Scholar] [CrossRef]
- Valbuena, R.; Maltamo, M.; Mehtätalo, L.; Packalena, P. Key structural features of Boreal forests may be detected directly using L-moments from airborne lidar data. Remote Sens. Environ. 2017, 194, 437–446. [Google Scholar] [CrossRef]
- Gelabert, P.J.; Montealegre, A.L.; Lamelas, M.T.; Domingo, D. Forest structural diversity characterization in Mediterranean landscapes affected by fires using Airborne Laser Scanning data. GIScience Remote Sens. 2020, 57, 497–509. [Google Scholar] [CrossRef]
- Alonso-Benito, A.; Arroyo, L.; Arbelo, M.; Hernández-Leal, P.; Alonso-Benito, A.; Arroyo, L.A.; Arbelo, M.; Hernández-Leal, P. Fusion of WorldView-2 and LiDAR Data to Map Fuel Types in the Canary Islands. Remote Sens. 2016, 8, 669. [Google Scholar] [CrossRef]


| Characteristics | Year 2011 | Year 2016 |
|---|---|---|
| Pulse repetition frequency | ~ 70 kHz | 176–286 kHz |
| Scanning frequency | ~ 45 kHz | 28–59 Hz |
| Maximum scan angle | 29° | 25° |
| Nominal point density | 0.5 points m−2 | 1 points m−2 |
| Average point density | 0.64 points m−2 | 1.25 points m−2 |
| Accuracy of the point cloud (RMSEz) | ≤0.2 m | 0.09 m |
| Beam diameter (1/e and 1/e2, mm) | 5.6, 8.0 | 6.2 |
| Beam divergence (1/e and 1/e2, mm) | 0.15, 0.22 | 0.23 |
| Pulse width (ns) | 9 | 3 |
| Maximum energy in a single pulse (mJ) | 0.2 | 0.5 |
| Type of Land Cover | Simulation 1st Capture | Simulation 2nd Capture |
|---|---|---|
| Grassland | 0.15 | 0.26 |
| Low Bush | 0.23 | 0.29 |
| Medium shrubs | 0.35 | 0.51 |
| High Bush | 0.73 | 1.01 |
| Pine trees | 0.85 | 1.14 |
| Type of Land Cover | Reflectance | Transmittance |
|---|---|---|
| Holm oak | 0.52 | 0.35 |
| Pine | 0.59 | 0.25 |
| Soil | 0.40 | 0 |
| Grassland | 0.27 | 0 |
| Wood | 0.28 | 0 |
| Sensor Parameters | Simulation 1st Capture | Simulation 2nd Capture |
|---|---|---|
| LiDAR mode | Image (multiple click) | Image (multiple click) |
| LiDAR Type | Discrete Return | Discrete Return |
| Minimum Target Reflectance for detection | 0.1 | 0.1 |
| Number of Points per pulse | 4 | 4 |
| Area of LIDAR sensor (m2) | 0.001 | 0.001 |
| Diameter of laser beam generated (mm) | 5.6 | 6.2 |
| Laser scanning mode | ALS | ALS |
| Definition of footprint range option | Half angles | Half angles |
| LIDAR platform altitude (km) | 3 | 3 |
| Platform azimuth (°) | 0 | 0 |
| Swath width (m) | 29 | 29 |
| Look angle (°) | 0 | 0 |
| Grid parameters azimuthal resolution (m) | 2 | 1.5 |
| Grid parameters - Range resolution (m) | 2 | 1.5 |
| Footprint (rad) | 0.000075 | 0.000085 |
| Faithful of view (rad) | 0.00009 | 0.000095 |
| Energy of each pulse (mj) | 0.2 | 0.5 |
| Half pulse duration (effective) | 3 | 3 |
| Pulse relative power | 0.5 | 0.5 |
| Half pulse duration at relative power (ns) | 8 | 2 |
| Photons number (kHz) | 1000 | 1000 |
| Fraction of photons at LiDAR radius | 0.368 | 0.368 |
| LiDAR acquisition rate (period) | 2 | 2 |
| Metric | Correlation Coefficients 2011 | Correlation Coefficients 2016 | |
|---|---|---|---|
| Canopy height metrics (CHM) | P60 | 0.89 | 0.84 |
| P70 | 0.93 | 0.88 | |
| P75 | 0.93 | 0.92 | |
| P80 | 0.93 | 0.91 | |
| P95 | 0.94 | 0.96 | |
| P99 | 0.97 | 0.97 * | |
| Elev. mean | 0.93 | 0.92 | |
| Elev. maximum | 0.93 | 0.97 | |
| Elev. SQRT mean SQ | 0.93 | 0.95 | |
| Elev. CURT mean CUBE | 0.94 | 0.96 | |
| Elev.L1 | 0.93 | 0.92 | |
| Elev.L2 | 0.95 | 0.96 | |
| Canopy height variability metrics (CHVM) | Elev.MAD.median | 0.85 | 0.81 |
| Elev.MAD.mode | 0.89 | 0.85 | |
| Elev.AAD | 0.94 | 0.96 | |
| Elev.IQ | 0.92 | 0.92 | |
| Elev st.dev. | 0.95 | 0.97 | |
| Elev variance | 0.95 | 0.97 | |
| Canopy density metrics (CDM) | Prop. 0_0.6 | 0.85 | 0.80 |
| Max above_4 | 0.90 | 0.94 | |
| Mean above_4 | 0.90 | 0.94 | |
| Mode above_4 | 0.88 | 0.90 | |
| Median above_4 | 0.89 | 0.93 | |
| St. dev. above_4 | 0.88 | 0.94 | |
| CV above_4 | 0.87 | 0.92 | |
| Prop. 3.00_3.50 | 0.85 | 0.80 | |
| Prop. 3.50_4.00 | 0.85 | 0.80 | |
| Prop. 4.00_4.50 | 0.87 | 0.81 | |
| Prop. 4.50_5.00 | 0.84 | 0.88 | |
| Prop. above 5.00 | 0.89 | 0.92 | |
| Diversity indices (DI) | LHDI | 0.85 | 0.83 |
| Rumple | 0.94 | 0.95 | |
| Metric | Correlation 2011 | Correlation 2016 | |
|---|---|---|---|
| Canopy height metrics (CHM) | P50 | 0.81 | 0.82 |
| P60 | 0.82 | 0.85 | |
| P70 | 0.85 | 0.84 | |
| P75 | 0.85 | 0.84 | |
| P80 | 0.83 | 0.82 | |
| P90 | 0.84 | 0.84 | |
| P95 | 0.85 | 0.84 | |
| P99 | 0.85 | 0.85 | |
| Elev.max | 0.84 | 0.85 | |
| Elev.mean | 0.86 | 0.83 | |
| Elev. SQRT mean SQ | 0.85 | 0.84 | |
| Elev. CUR mean CUBE | 0.85 | 0.84 | |
| Total.first.ret. | 0.80 | 0.80 | |
| Total.all.ret. | 0.80 | 0.80 | |
| Total.ret.count | 0.80 | 0.80 | |
| Elev.L1 | 0.86 | 0.83 | |
| Elev.L2 | 0.85 | 0.84 | |
| Canopy height variability metrics (CHVM) | Elev.variance | 0.86 | 0.84 |
| Elev.IQ | 0.85 | 0.84 | |
| Elev.AAD | 0.85 | 0.84 | |
| Elev st.dev. | 0.86 | 0.84 | |
| Elev.MAD.median | 0.85 | 0.85 | |
| Elev.MAD.mode | 0.85 | 0.84 | |
| Canopy density metrics (CDM) | % first ret. Above 0 | 0.79 | 0.80 |
| All ret. Above 0 | 0.79 | 0.80 | |
| Prop. 0_0.5 | −0.83 | −0.81 | |
| Prop. 0_0.6 | −0.84 | −0.81 | |
| Total.ret.count. above_4 | 0.80 | 0.80 | |
| Prop. above 4 | 0.80 | 0.80 | |
| CV above_4 | 0.76 | 0.80 | |
| Max above_4 | 0.76 | 0.80 | |
| Mean above_4 | 0.79 | 0.79 | |
| Median above_4 | 0.76 | 0.79 | |
| Mode above_4 | 0.77 | 0.81 | |
| st.dev above_4 | 0.77 | 0.80 | |
| Diversity indices (DI) | Rumple | −0.85 | −0.84 |
| LHDI | 0.78 | 0.78 | |
| All Subset Selection Approach | Simulation of 1st Capture (2011) | Simulation of 2nd Capture (2016) |
|---|---|---|
| seqrep | P30 + Elev.CV+ Prop. above_4+ Prop. 2.5_3 | P95+ P99+ Mean 0_0.6 + Prop. 2_4 |
| Exhaustive | P30 + Elev.CV+ Prop. above_4+ Prop. 2.5_3 | P60+ Prop. 2_4+ Median 0_0.6 + Elev.L4 |
| Forward | P30+ Elev.L.CV+ % first ret. Above mean | Elev. SQRT mean SQ + Elev. CUR mean CUBE + Mean 0_0.6 + Max. above_4 |
| Backward | P30+Elev.L.CV+ Mean above_4+ Prop. 0.5_1 | Elev. max.+ Mean 0_0.6 + Mode 0_0.6 + Prop. 2_4 |
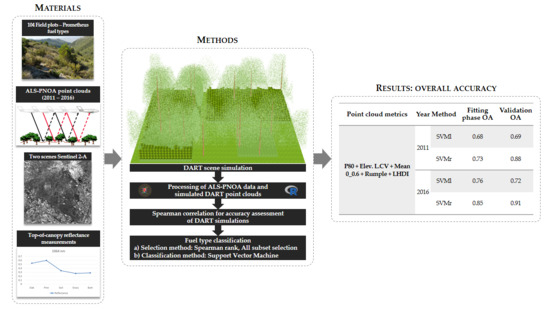
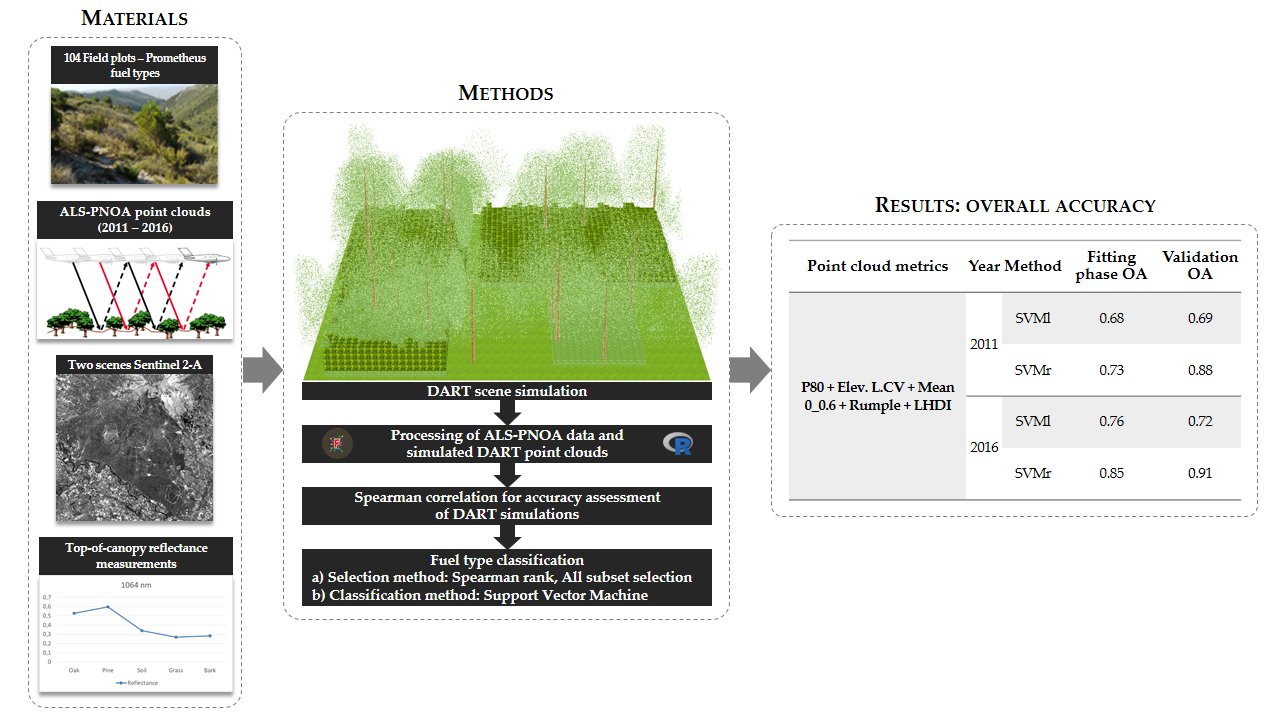
| Metrics | Year | Method | Fitting phase OA | Validation OA |
|---|---|---|---|---|
| P80 + Elev. L.CV + Mean 0_0.6 + Rumple+ LHDI | 2011 | SVMl | 0.68 | 0.69 |
| SVMr | 0.73 | 0.88 | ||
| 2016 | SVMl | 0.76 | 0.72 | |
| SVMr | 0.85 | 0.91 |
| Year | Metrics | Approach | Fitting Phase | Validation |
|---|---|---|---|---|
| 2011 | P30+ Elev.CV + Prop. 2.5_3 + Prop. above_4 | seqrep and Exhaustive | 0.72 | 0.72 |
| P30+ Elev. L.CV+ % first ret. Above mean | Forward | 0.75 | 0.74 | |
| P30+ Elev. L.CV+ Prop 0.5_1+ Mean above_4 | Backward | 0.69 | 0.74 | |
| 2016 | P95+ P99+ Mean 0_0.6+ Prop. 2_4 | seqrep | 0.79 | 0.78 |
| P60+ Elev. L4+ Median 0_0.6+ Prop. 2_4 | Exhaustive | 0.73 | 0.79 | |
| Elev. SQRT mean SQ + Elev. CUR mean CUBE + Mean 0_0.6 + Max. above_4 | Forward | 0.72 | 0.72 | |
| Elev. max + Mean 0_0.6 + Mode 0_0.6 + Prop. 2_4 | Backward | 0.83 | 0.84 |
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Predicted | Fuel Type 1 | Fuel Type 2 | Fuel Type 3 | Fuel Type 4 | Fuel Type 5 | Fuel Type 6 | Fuel Type 7 | Total Plots | User´s Accuracy (%) |
| Fuel type 1 | 11 | 4 | 0 | 0 | 0 | 0 | 0 | 15 | 73.3 |
| Fuel type 2 | 1 | 17 | 1 | 0 | 0 | 0 | 0 | 19 | 89.5 |
| Fuel type 3 | 1 | 3 | 14 | 0 | 0 | 0 | 0 | 18 | 77.8 |
| Fuel type 4 | 0 | 0 | 0 | 8 | 1 | 0 | 0 | 9 | 88.9 |
| Fuel type 5 | 0 | 0 | 0 | 0 | 19 | 0 | 0 | 19 | 100 |
| Fuel type 6 | 0 | 0 | 0 | 0 | 1 | 9 | 0 | 10 | 90.0 |
| Fuel type 7 | 0 | 0 | 0 | 0 | 0 | 0 | 14 | 14 | 100 |
| Total plots | 13 | 24 | 15 | 8 | 21 | 9 | 14 | 104 | 88.5 1 |
| Producer´s accuracy (%) | 84.6 | 70.8 | 93.3 | 100 | 90.5 | 100 | 100 | 91.3 2 | 88.5 * |
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Predicted | Fuel Type 1 | Fuel Type 2 | Fuel Type 3 | Fuel Type 4 | Fuel Type 5 | Fuel Type 6 | Fuel Type 7 | Total Plots | User´s Accuracy (%) |
| Fuel type 1 | 9 | 1 | 0 | 0 | 0 | 0 | 0 | 10 | 90.0 |
| Fuel type 2 | 4 | 23 | 1 | 0 | 0 | 0 | 0 | 28 | 82.1 |
| Fuel type 3 | 0 | 0 | 14 | 0 | 0 | 0 | 0 | 14 | 100 |
| Fuel type 4 | 0 | 0 | 0 | 8 | 0 | 0 | 0 | 8 | 100 |
| Fuel type 5 | 0 | 0 | 0 | 0 | 21 | 2 | 0 | 23 | 91.3 |
| Fuel type 6 | 0 | 0 | 0 | 0 | 0 | 6 | 0 | 6 | 100 |
| Fuel type 7 | 0 | 0 | 0 | 0 | 0 | 1 | 14 | 15 | 93.3 |
| Total plots | 13 | 24 | 15 | 8 | 21 | 9 | 14 | 104 | 93.8 1 |
| Producer´s accuracy (%) | 69.2 | 95.8 | 93.3 | 100 | 100 | 66.7 | 100 | 89.3 2 | 91.3 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Revilla, S.; Lamelas, M.T.; Domingo, D.; de la Riva, J.; Montorio, R.; Montealegre, A.L.; García-Martín, A. Assessing the Potential of the DART Model to Discrete Return LiDAR Simulation—Application to Fuel Type Mapping. Remote Sens. 2021, 13, 342. https://doi.org/10.3390/rs13030342
Revilla S, Lamelas MT, Domingo D, de la Riva J, Montorio R, Montealegre AL, García-Martín A. Assessing the Potential of the DART Model to Discrete Return LiDAR Simulation—Application to Fuel Type Mapping. Remote Sensing. 2021; 13(3):342. https://doi.org/10.3390/rs13030342
Chicago/Turabian StyleRevilla, Sergio, María Teresa Lamelas, Darío Domingo, Juan de la Riva, Raquel Montorio, Antonio Luis Montealegre, and Alberto García-Martín. 2021. "Assessing the Potential of the DART Model to Discrete Return LiDAR Simulation—Application to Fuel Type Mapping" Remote Sensing 13, no. 3: 342. https://doi.org/10.3390/rs13030342
APA StyleRevilla, S., Lamelas, M. T., Domingo, D., de la Riva, J., Montorio, R., Montealegre, A. L., & García-Martín, A. (2021). Assessing the Potential of the DART Model to Discrete Return LiDAR Simulation—Application to Fuel Type Mapping. Remote Sensing, 13(3), 342. https://doi.org/10.3390/rs13030342