European Wide Forest Classification Based on Sentinel-1 Data



Abstract
1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. Sentinel-1 SAR
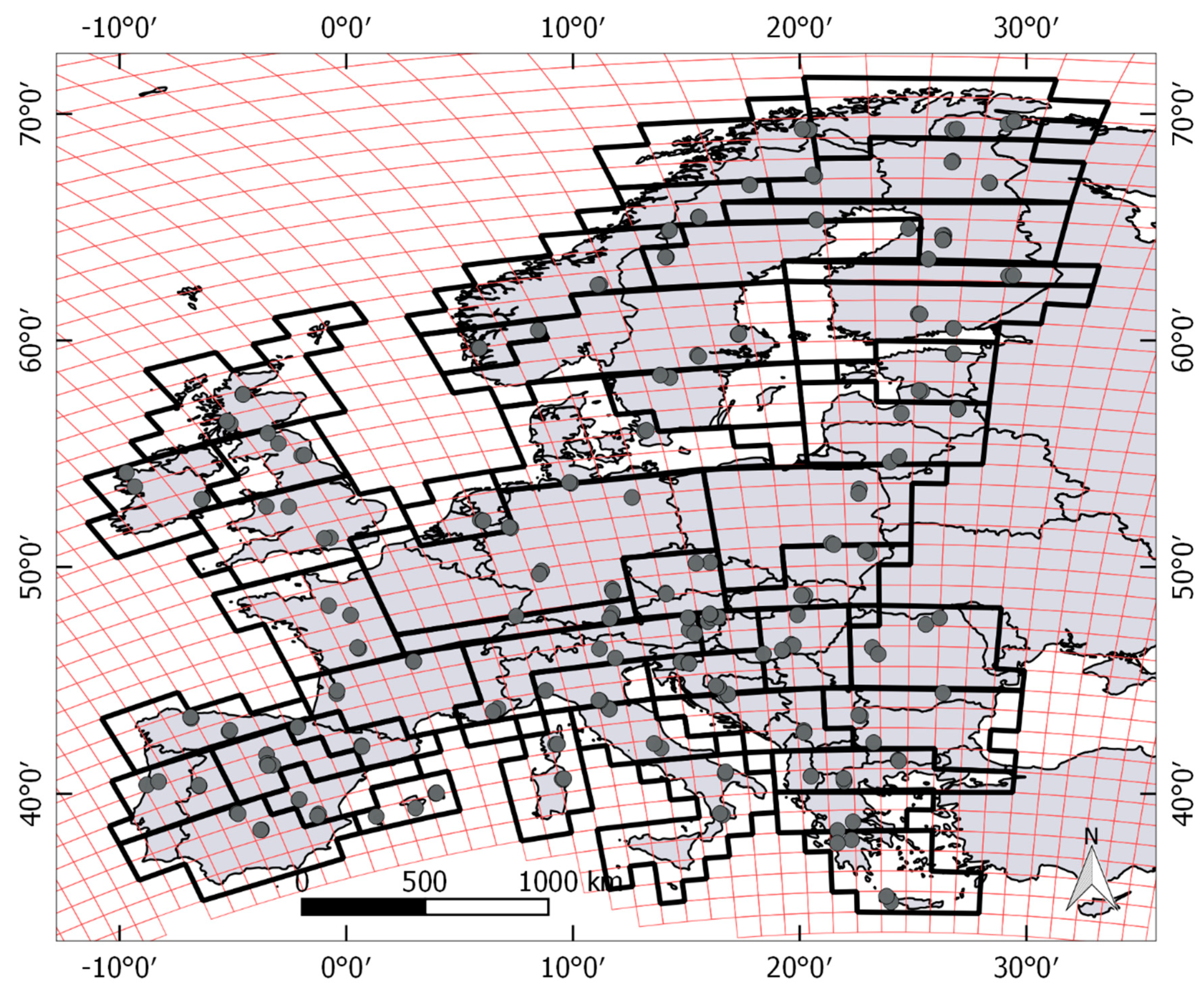
2.1.2. Validation Data
2.2. Method
2.2.1. Sentinel-1 Pre-processing
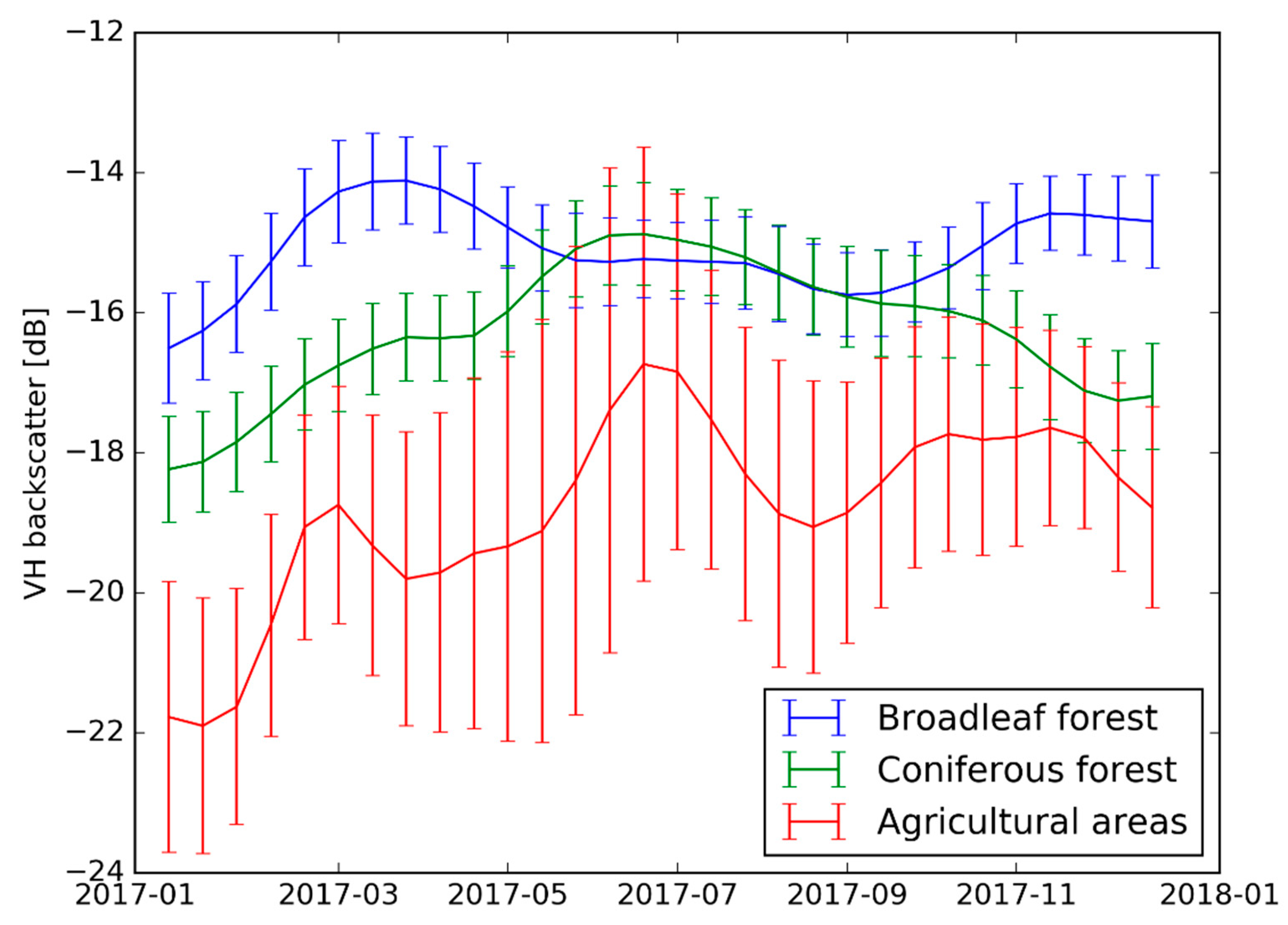
2.2.2. SAR Seasonality Time Series Computation
2.2.3. Construction of Forest Maps
2.2.4. Validation
2.2.5. Sensitivity Analysis
3. Results
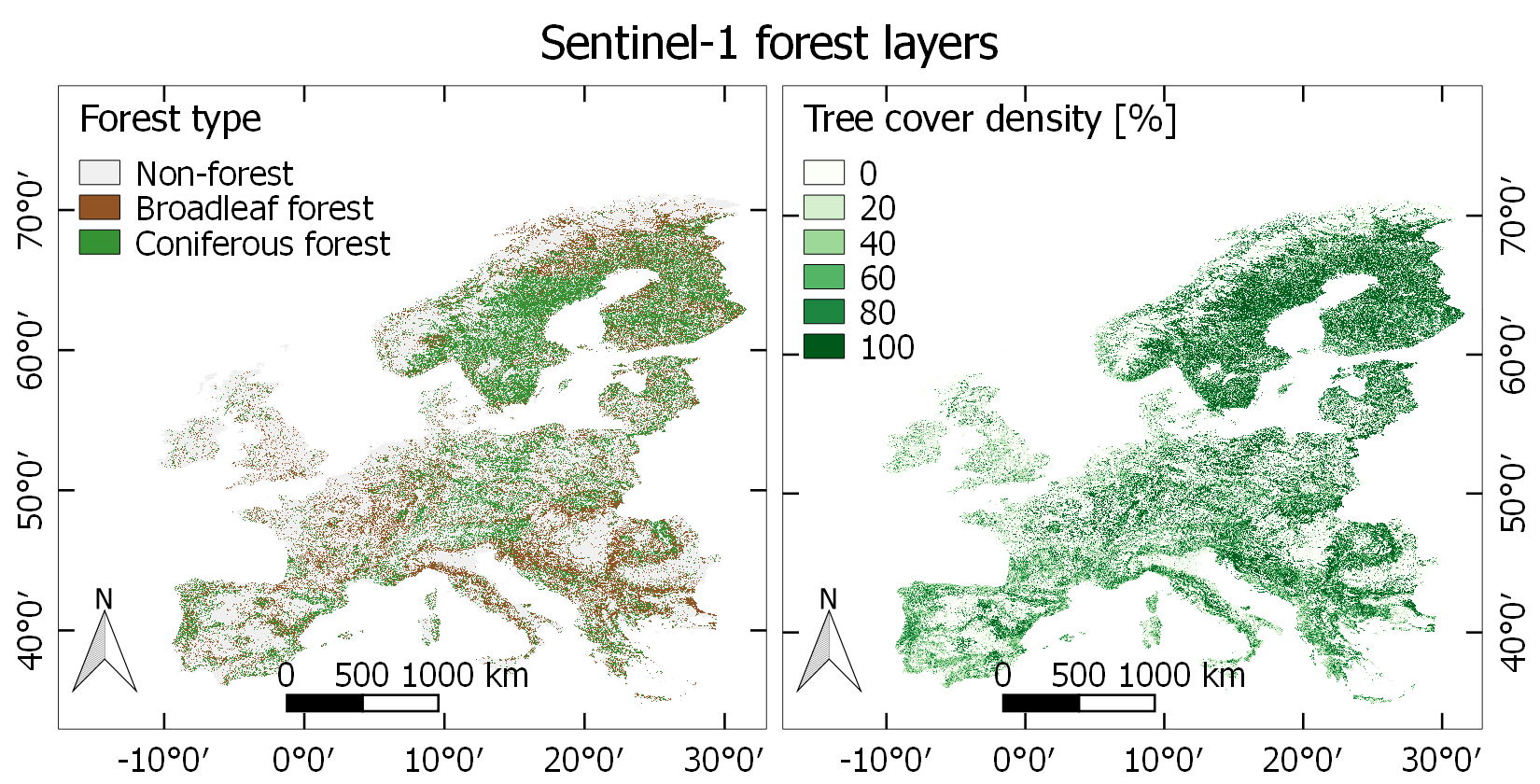
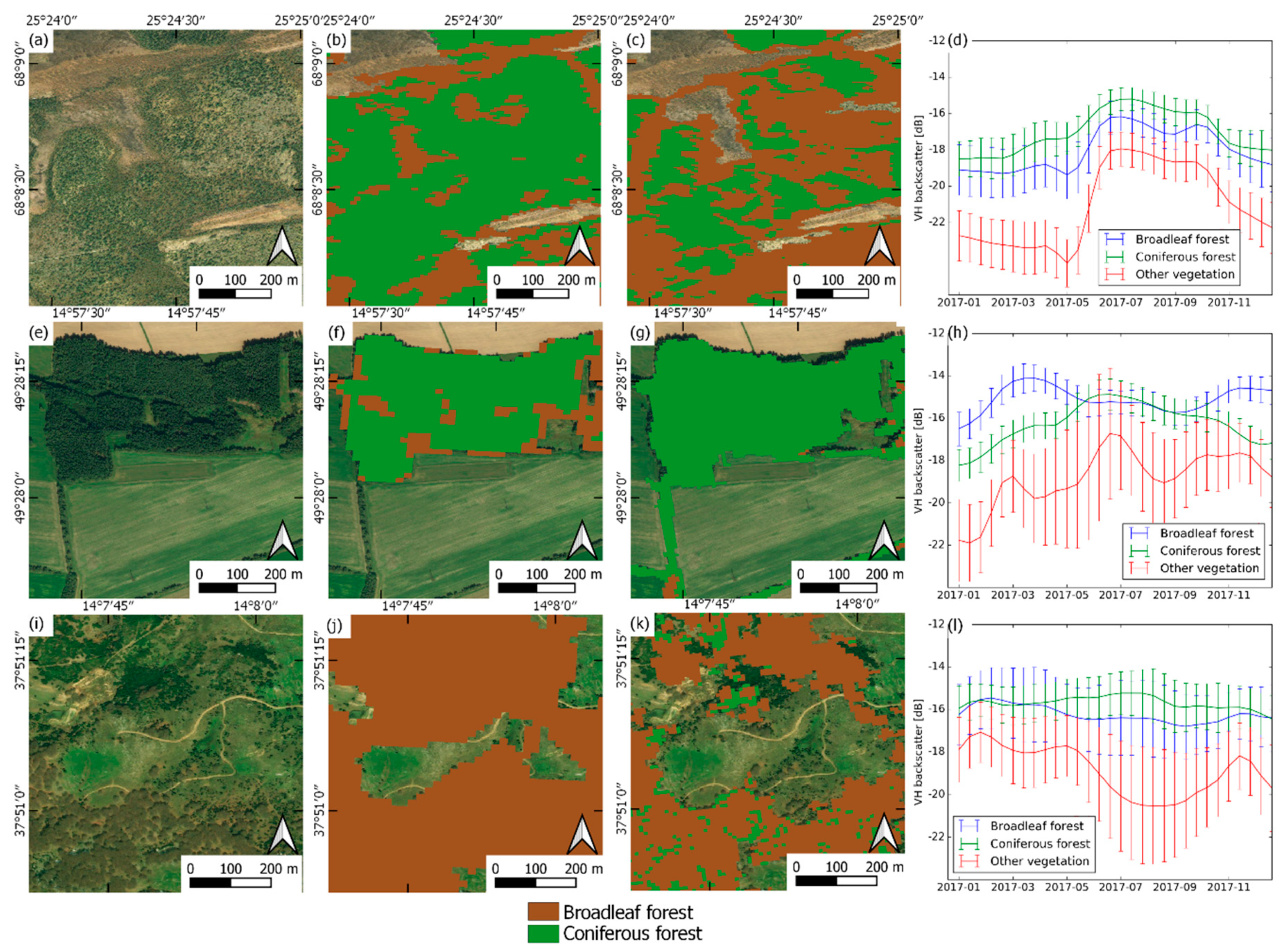
3.1. Forest Area and Forest Type
3.1.1. Copernicus HRL Dataset
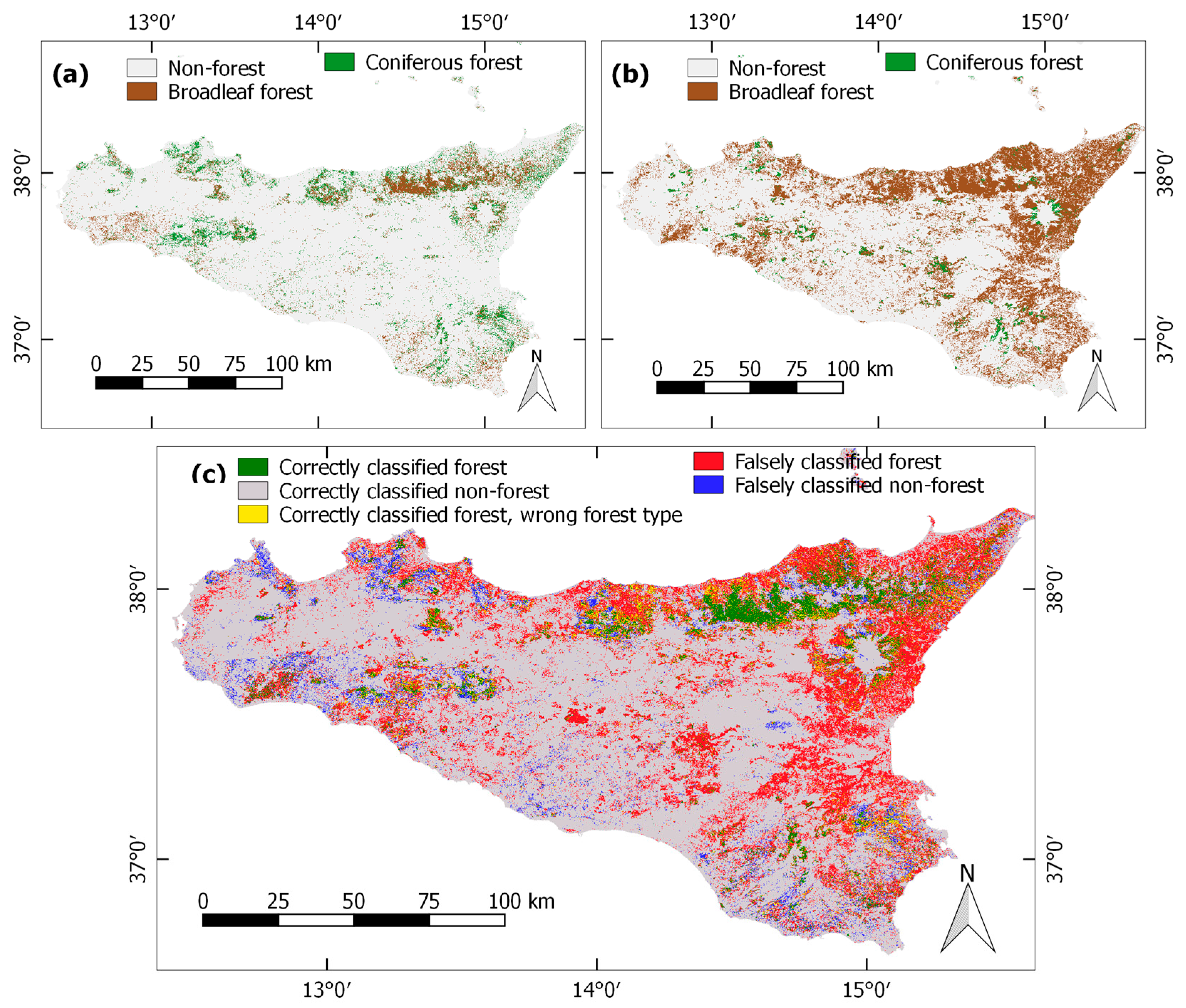
3.1.2. National Datasets
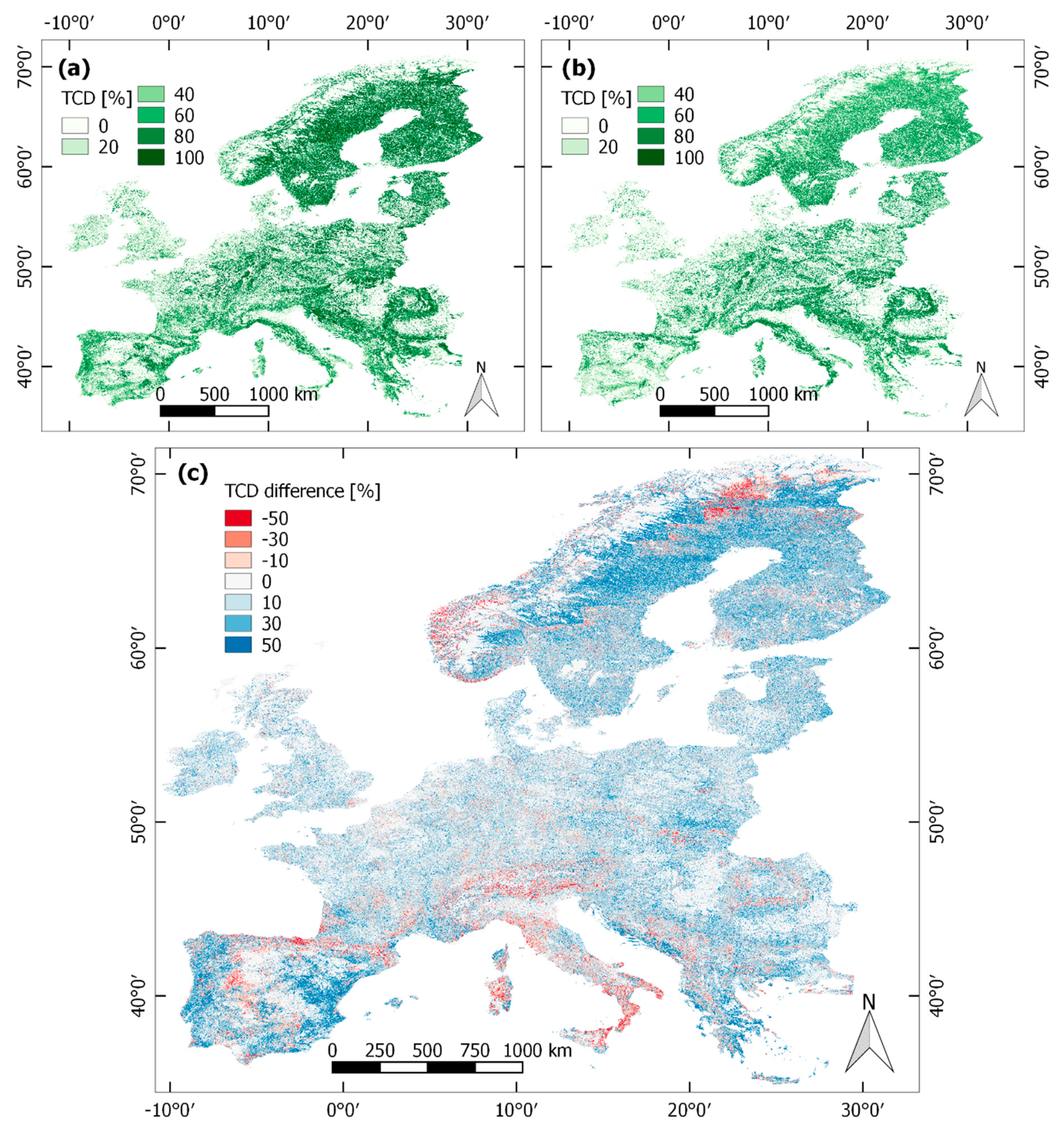
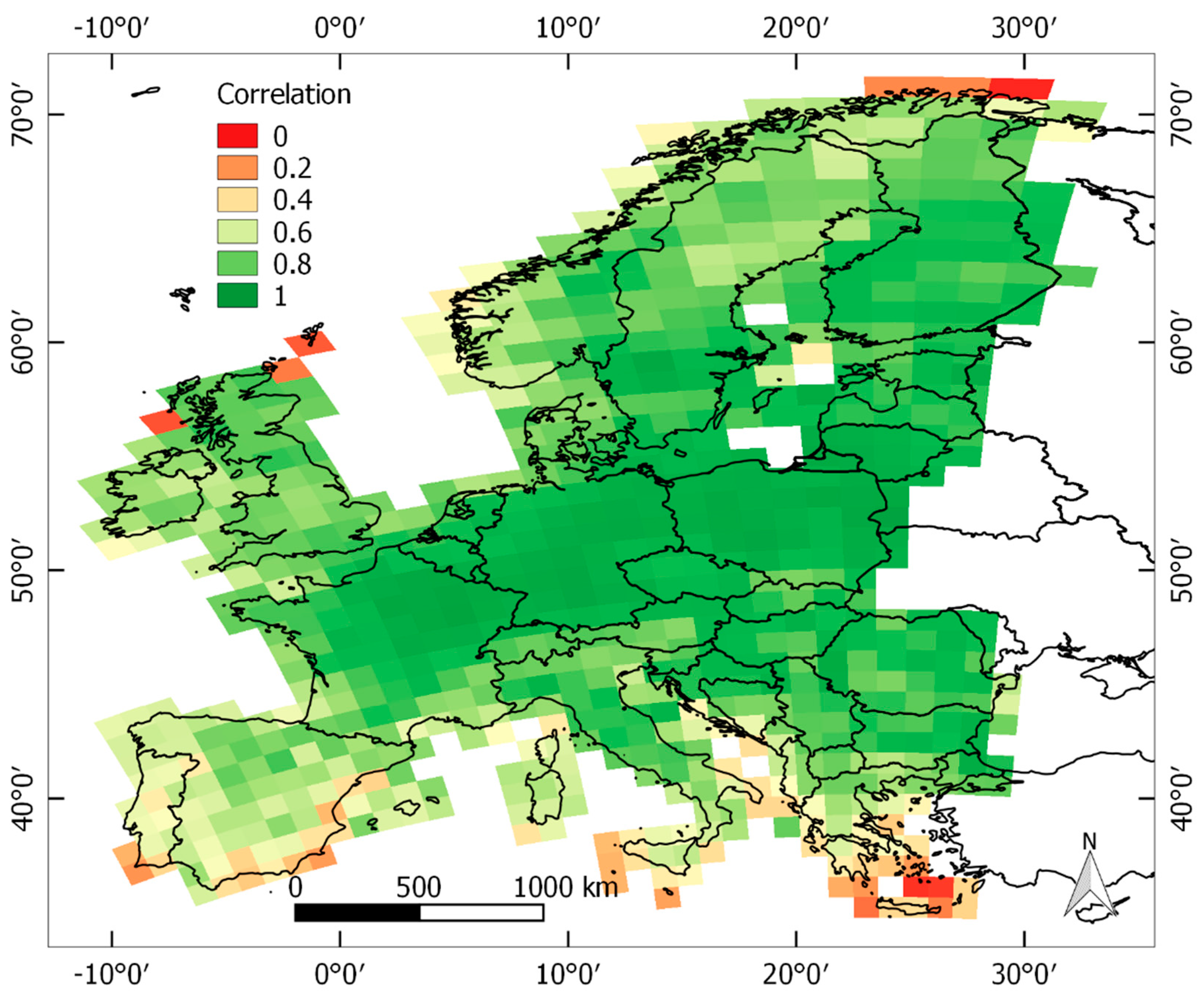
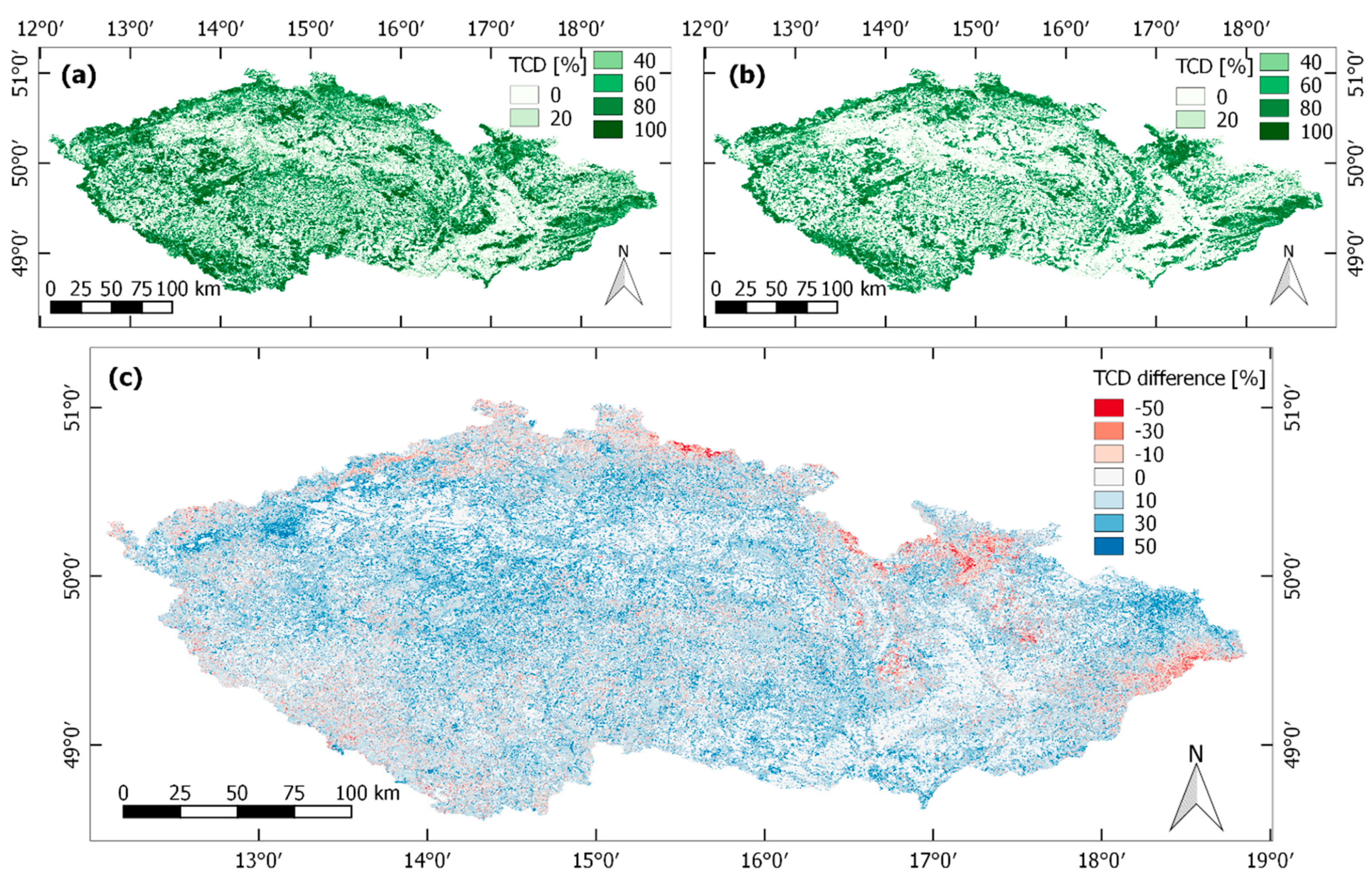
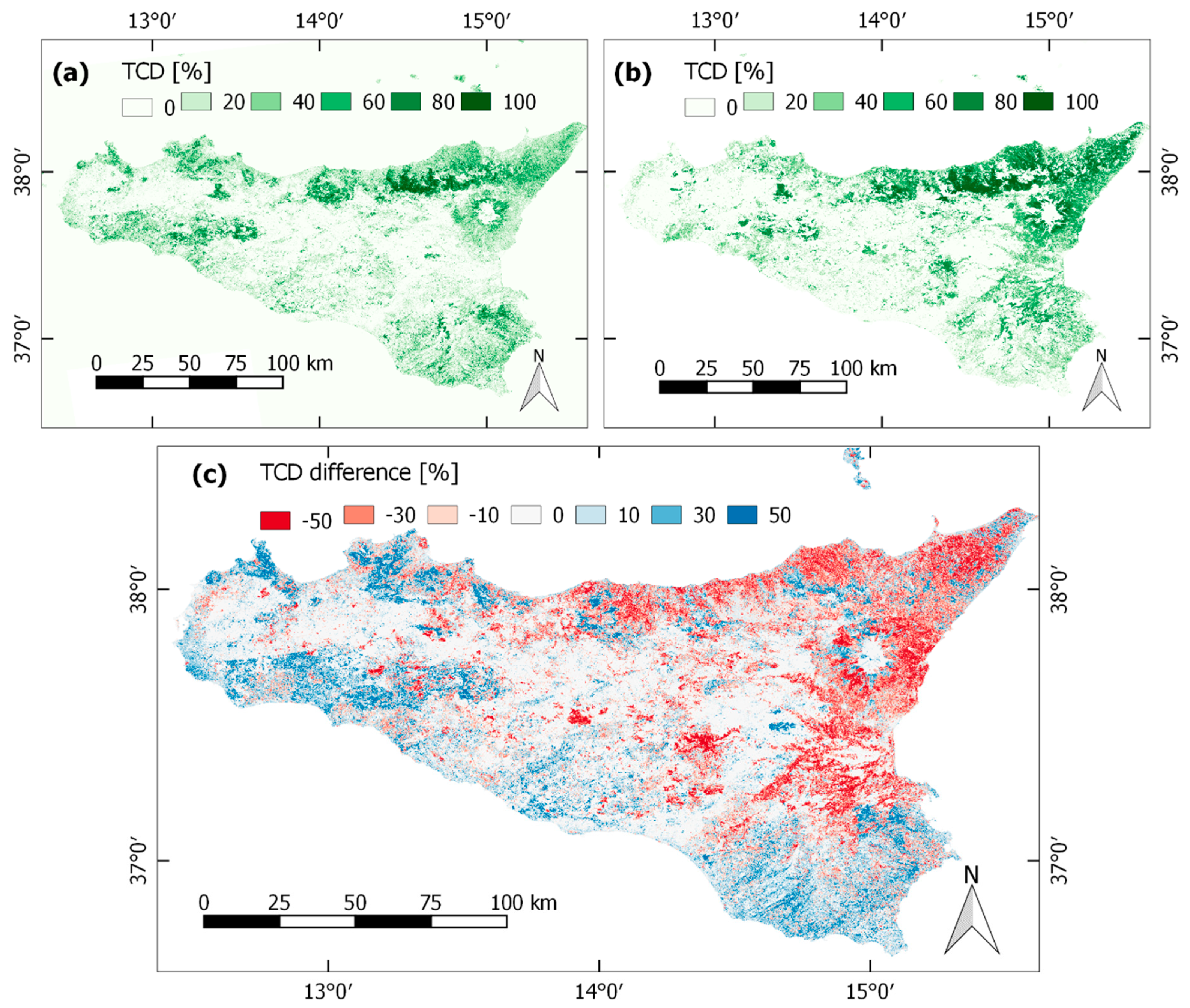
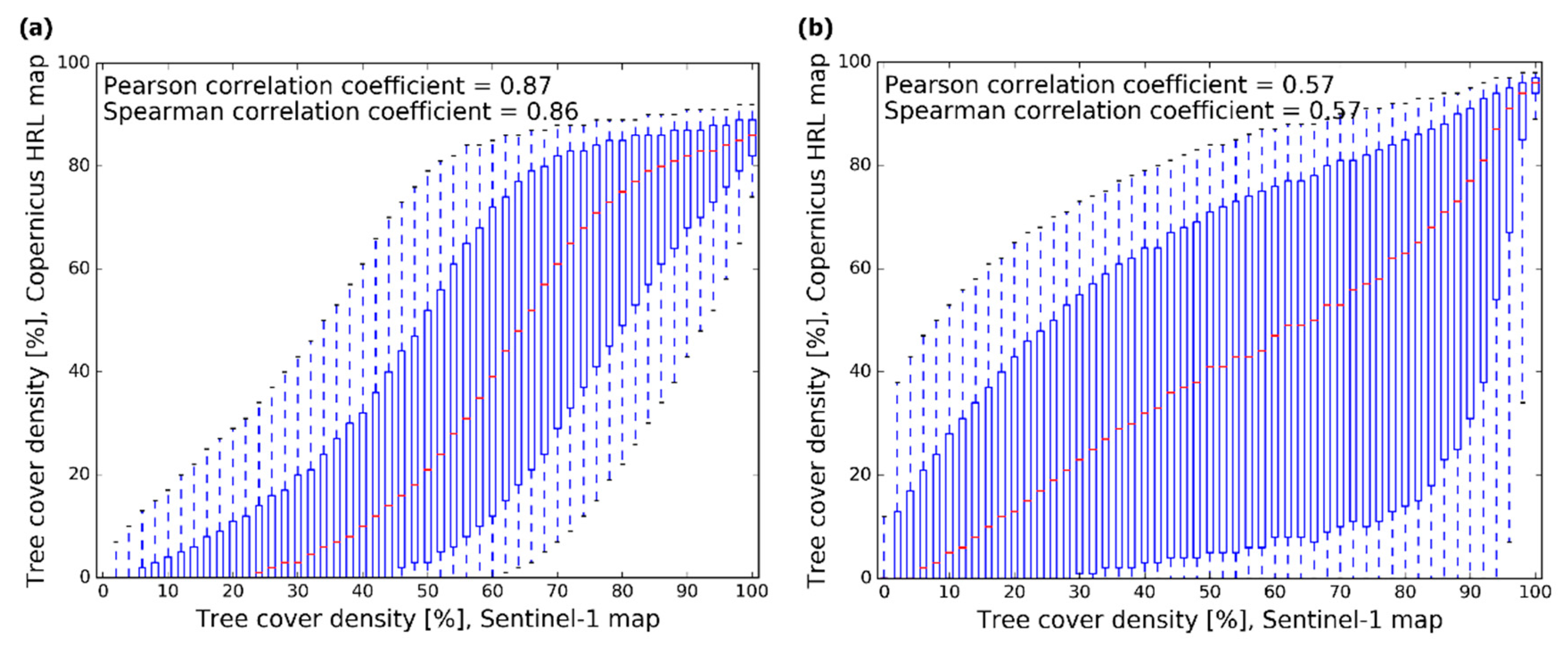
3.2. Tree Cover Density
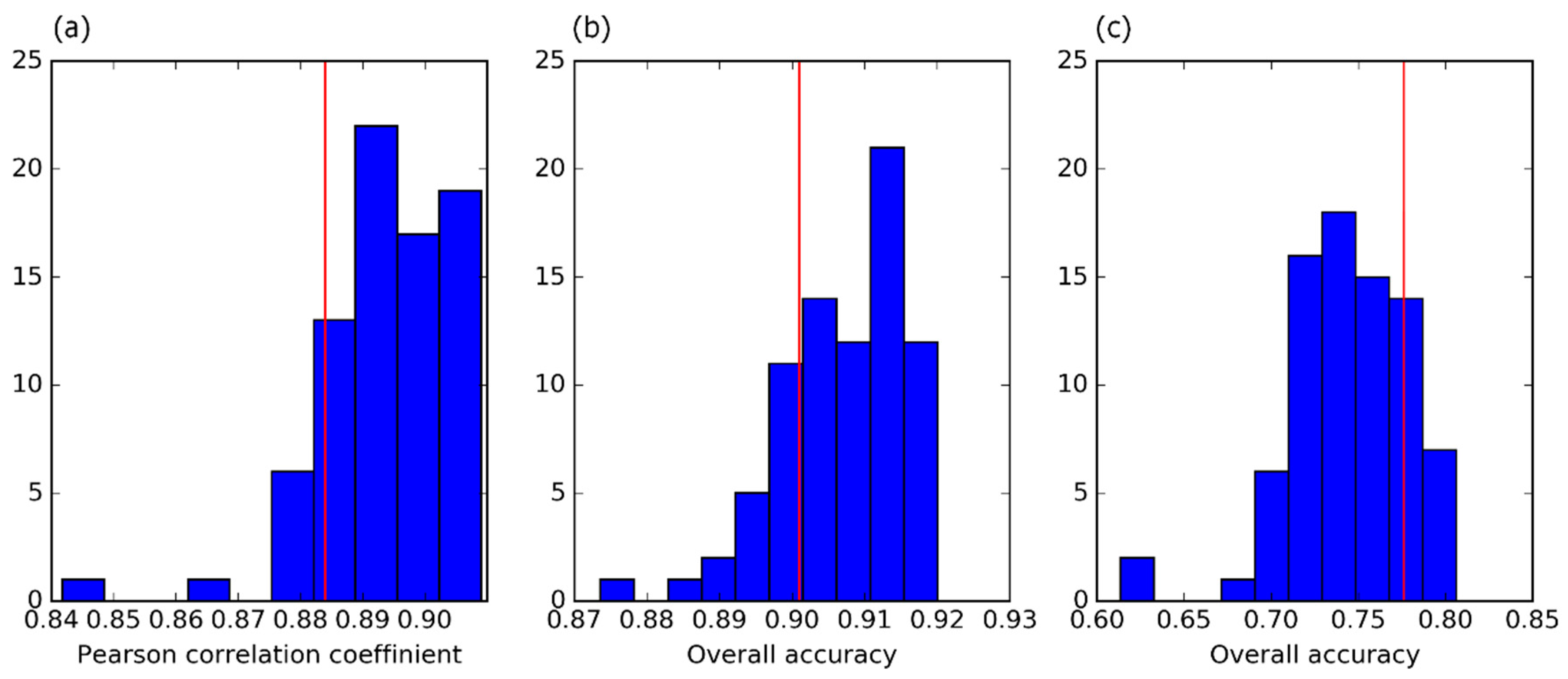
3.3. Sensitivity Analysis
4. Discussion
4.1. Performance of the Sentinel-1 Based Forest Maps
4.2. Selection of the Reference Time Series
4.3. Variability of National Reference Datasets
4.4. Areas of Further Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Austria
- Czech Republic
- Broadleaf type: oak, beech, other broadleaf species;
- Coniferous type: spruce, pine;
- Non-forest: other;
- Masked: uncertain pixels, young trees, wood plantations areas, mountain pine;
- England, Scotland, and Wales.
- Broadleaf type: Broadleaved;
- Coniferous type: Coniferous;
- Mixed: mixed, mixed predominantly conifer, mixed predominantly broadleaf;
- Non-forest: Shrub;
- Masked: Coppice, Coppice with standards, young trees, felled, ground prepared for new planting, windblow, failed, assumed woodland, cloud or shadow, uncertain, low density.
- Estonia
- France
- Coniferous forest: open coniferous forest, closed coniferous forest;
- Broadleaf forest: open broadleaf forest, closed broadleaf forest, poplar trees;
- Mixed forest: open mixed forest, closed mixed forest;
- Non forest: herbal vegetation;
- Masked: forest without tree cover.
- Finland
- Germany
- Non-forest: non-forest;
- Forest: productive forest, unproductive forest, stocked timberland;
- Masked: temporarily unstocked forest, unstocked forest land.
- Hungary
- Latvia
- Slovakia
- Sweden
- Switzerland
References
- Nabuurs, G.; Päivinen, R.; Sikkema, R.; Mohren, G. The role of European forests in the global carbon cycle—A review. Biomass Bioenergy 1997, 13, 345–358. [Google Scholar] [CrossRef]
- Grace, J. Understanding and managing the global carbon cycle. J. Ecol. 2004, 92, 189–202. [Google Scholar] [CrossRef]
- Pimentel, D.; Kounang, N. Ecology of soil erosion in ecosystems. Ecosystems 1998, 1, 416–426. [Google Scholar] [CrossRef]
- Calder, I.; Hofer, T.; Vermont, S.; Warren, P. Towards a new understanding of forests and water. UNASYLVA-FAO- 2008, 229, 3. [Google Scholar]
- Ernst, C.; Gullick, R.; Nixon, K. Conserving forests to protect water. Opflow 2004, 30, 1–7. [Google Scholar] [CrossRef]
- Borre, J.V.; Paelinckx, D.; Mücher, C.A.; Kooistra, L.; Haest, B.; De Blust, G.; Schmidt, A.M. Integrating remote sensing in Natura 2000 habitat monitoring: Prospects on the way forward. J. Nat. Conserv. 2011, 19, 116–125. [Google Scholar] [CrossRef]
- Barrett, F.; McRoberts, R.E.; Tomppo, E.; Cienciala, E.; Waser, L.T. A questionnaire-based review of the operational use of remotely sensed data by national forest inventories. Remote Sens. Environ. 2016, 174, 279–289. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Kangas, A.; Astrup, R.; Breidenbach, J.; Fridman, J.; Gobakken, T.; Korhonen, K.T.; Maltamo, M.; Nilsson, M.; Nord-Larsen, T.; Næsset, E.; et al. Remote sensing and forest inventories in Nordic countries–roadmap for the future. Scand. J. For. Res. 2018, 33, 397–412. [Google Scholar] [CrossRef]
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef]
- Langanke, T.; Büttner, G.; Dufourmont, H.; Iasillo, D.; Probeck, M.; Rosengren, M.; Sousa, A.; Strobl, P.; Weichselbaum, J. GIO land (GMES/Copernicus initial operations land) High Resolution Layers (HRLs)–summary of product specifications. In European Environment Agency Copernicus Report; European Environmental Agency: Copenhagen, Denmark, 2013; Available online: https://land.copernicus.eu/user-corner/technical-library/gio-land-high-resolution-layers-hrls-2013-summary-of-product-specifications (accessed on 18 January 2021).
- Lang, M.; Kaha, M.; Laarmann, D.; Sims, A. Construction of tree species composition map of Estonia using multispectral satellite images, soil map and a random forest algorithm. For. Stud. 2018, 68, 5–24. [Google Scholar] [CrossRef][Green Version]
- Hansen, J.N.; Mitchard, E.T.; King, S. Assessing Forest/Non-Forest Separability Using Sentinel-1 C-Band Synthetic Aperture Radar. Remote Sens. 2020, 12, 1899. [Google Scholar] [CrossRef]
- Rüetschi, M.; Schaepman, M.E.; Small, D. Using multitemporal sentinel-1 c-band backscatter to monitor phenology and classify deciduous and coniferous forests in northern switzerland. Remote Sens. 2018, 10, 55. [Google Scholar] [CrossRef]
- Dostálová, A.; Wagner, W.; Milenković, M.; Hollaus, M. Annual seasonality in Sentinel-1 signal for forest mapping and forest type classification. Int. J. Remote Sens. 2018, 39, 7738–7760. [Google Scholar] [CrossRef]
- Imhoff, M.L. Radar backscatter/biomass saturation: Observations and implications for global biomass assessment. In Proceedings of the IGARSS’93-IEEE International Geoscience and Remote Sensing Symposium, Tokyo, Japan, 18–21 August 1993; pp. 43–45. [Google Scholar]
- Lucas, R.; Armston, J.; Fairfax, R.; Fensham, R.; Accad, A.; Carreiras, J.; Kelley, J.; Bunting, P.; Clewley, D.; Bray, S. An evaluation of the ALOS PALSAR L-band backscatter—Above ground biomass relationship Queensland, Australia: Impacts of surface moisture condition and vegetation structure. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 576–593. [Google Scholar] [CrossRef]
- Ranson, K.J.; Sun, G. Effects of environmental conditions on boreal forest classification and biomass estimates with SAR. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1242–1252. [Google Scholar] [CrossRef]
- Santoro, M.; Beer, C.; Cartus, O.; Schmullius, C.; Shvidenko, A.; McCallum, I.; Wegmüller, U.; Wiesmann, A. Retrieval of growing stock volume in boreal forest using hyper-temporal series of Envisat ASAR ScanSAR backscatter measurements. Remote Sens. Environ. 2011, 115, 490–507. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring With Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2019, 57, 520–539. [Google Scholar] [CrossRef]
- Patel, P.; Srivastava, H.S.; Panigrahy, S.; Parihar, J.S. Comparative evaluation of the sensitivity of multi-polarized multi-frequency SAR backscatter to plant density. Int. J. Remote Sens. 2006, 27, 293–305. [Google Scholar] [CrossRef]
- Frison, P.-L.; Fruneau, B.; Kmiha, S.; Soudani, K.; Dufrêne, E.; Le Toan, T.; Koleck, T.; Villard, L.; Mougin, E.; Rudant, J.-P. Potential of Sentinel-1 data for monitoring temperate mixed forest phenology. Remote Sens. 2018, 10, 2049. [Google Scholar] [CrossRef]
- Srivastava, P.K.; O’Neill, P.; Cosh, M.; Lang, R.; Joseph, A. Evaluation of radar vegetation indices for vegetation water content estimation using data from a ground-based SMAP simulator. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1296–1299. [Google Scholar]
- Ahern, F.J.; Leckie, D.J.; Drieman, J.A. Seasonal changes in relative C-band backscatter of northern forest cover types. IEEE Trans. Geosci. Remote Sens. 1993, 31, 668–680. [Google Scholar] [CrossRef]
- Monteith, A.R.; Ulander, L.M. Temporal survey of P-and L-band polarimetric backscatter in boreal forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3564–3577. [Google Scholar] [CrossRef]
- Dubois, C.; Mueller, M.; Pathe, C.; Jagdhuber, T.; Cremer, F.; Thiel, C.; Schmullius, C. Characterization of Land Cover Seasonality in Sentinel-1 Time Series Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 97–104. [Google Scholar] [CrossRef]
- Rodionova, N. 2015–2016 Seasonal Variations of Backscattering from Natural Coverage in the Moscow Region Based on Radar Data from the Sentinel 1A Satellite. Izv. Atmos. Ocean. Phys. 2018, 54, 1272–1281. [Google Scholar] [CrossRef]
- Dostálová, A.; Hollaus, M.; Milenković, M.; Wagner, W. Forest area derivation from sentinel-1 data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 227. [Google Scholar] [CrossRef]
- Yu, H.; Ni, W.; Zhang, Z.; Sun, G.; Zhang, Z. Regional Forest Mapping over Mountainous Areas in Northeast China Using Newly Identified Critical Temporal Features of Sentinel-1 Backscattering. Remote Sens. 2020, 12, 1485. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Sabel, D.; Wagner, W. Optimisation of global grids for high-resolution remote sensing data. Comput. Geosci. 2014, 72, 84–93. [Google Scholar] [CrossRef]
- Elefante, S.; Wagner, W.; Briese, C.; Cao, S.; Naeimi, V. High-performance computing for soil moisture estimation. In Proceedings of the 2016 Conference on Big Data from Space (BiDS’16), Santa Cruz de Tenerife, Spain, 15–17 March 2016; pp. 95–98. [Google Scholar]
- Small, D.; Schubert, A. Guide to ASAR geocoding. ESA-ESRIN Tech. Note RSL-ASAR-GC-AD 2008, 1, 36. [Google Scholar]
- Pathe, C.; Wagner, W.; Sabel, D.; Doubkova, M.; Basara, J.B. Using ENVISAT ASAR global mode data for surface soil moisture retrieval over Oklahoma, USA. IEEE Trans. Geosci. Remote Sens. 2009, 47, 468–480. [Google Scholar] [CrossRef]
- Peters, J.; Lievens, H.; De Baets, B.; Verhoest, N. Accounting for seasonality in a soil moisture change detection algorithm for ASAR Wide Swath time series. Hydrol. Earth Syst. Sci. 2012, 16, 773–786. [Google Scholar] [CrossRef]
- Casalegno, S.; Amatulli, G.; Bastrup-Birk, A.; Durrant, T.H.; Pekkarinen, A. Modelling and mapping the suitability of European forest formations at 1-km resolution. Eur. J. For. Res. 2011, 130, 971–981. [Google Scholar] [CrossRef]
- Dostalova, A.; Milenkovic, M.; Hollaus, M.; Wagner, W. Influence of Forest Structure on the Sentinel-1 Backscatter Variation-Analysis with Full-Waveform LiDAR Data’. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Dostalova, A.; Cao, S.; Wagner, W. European Sentinel-1 Forest Type and Tree Cover Density Maps. 1.0 ed. TU Data. 2021. [Google Scholar] [CrossRef]
- Reese, H.; Granqvist-Pahlén, T.; Egberth, M.; Nilsson, M.; Olsson, H. Automated estimation of forest parameters for Sweden using Landsat data and the kNN algorithm. In Proceedings of the 31st International Symposium on Remote Sensing of Environment, St. Petersburg, Russia, 20–24 June 2005. [Google Scholar]
- Waser, L.T.; Ginzler, C.; Rehush, N. Wall-to-wall tree type mapping from countrywide airborne remote sensing surveys. Remote Sens. 2017, 9, 766. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Dataset Provider | Data Type | Information Content | Spatial Resolution | Reference Year |
|---|---|---|---|---|---|
| Austria | Austrian Research Centre for Forests | Raster | Forest mask | 1 m | |
| Czech Republic | Forest Management Institute | Raster | Dominant tree species within pixel | 10 m | 2017 |
| England, Scotland, Wales | Forestry Commission | Vector | Forest type | MMU 0.5 ha | 2017 |
| Estonia | University of Tartu | Random points | Share of conifers within forest stand | 10,277 points | 2017 |
| France | Institut National de L’Information Geographique et Forestriere | Vector | Forest type | MMU 0.5 ha | 2014–2019 |
| Finland | Finnish Environment Institute | Raster | Forest type | 20 m | 2018 |
| Germany | National Forest Inventory | Points | Forest type | 195,630 points | 2012–2017 |
| Hungary | Nemzeti Földügyi Központ | Raster | Forest type | 10 m | 2020 |
| Latvia | Latvian State Forest Research Institute Silava | Random points | Forest type | 10,000 points | 2019 |
| Slovakia | Slovakian National Forest Centre | Vector | Dominant tree species within forest stand | 2017 | |
| Sweden | Swedish University of Agricultural Sciences | Raster | Standing volumes of most common tree species | 25 m | 2010 |
| Switzerland | National Forest Inventory | Raster | Per-pixel probability of conifers | 25 m | 2018 |
| Forest/non-Forest | Forest Type | |
|---|---|---|
| Overall accuracy | 0.86 | 0.73 |
| Producers’ accuracy forest/broadleaf | 0.83 | 0.81 |
| Users’ accuracy forest/broadleaf | 0.81 | 0.68 |
| Producers’ accuracy non-forest/coniferous | 0.88 | 0.66 |
| Users’ accuracy non-forest/coniferous | 0.89 | 0.79 |
| Sentinel 1 vs. Reference | Copernicus vs. Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Forest | Non-Forest | Forest | Non-Forest | |||||||
| OA | PA | UA | PA | UA | OA | PA | UA | PA | UA | |
| Austria | 0.91 | 0.92 | 0.87 | 0.90 | 0.95 | 0.93 | 0.93 | 0.90 | 0.93 | 0.95 |
| Czech Republic | 0.90 | 0.94 | 0.79 | 0.87 | 0.97 | 0.95 | 0.93 | 0.91 | 0.95 | 0.96 |
| England, Scotland, Wales | 0.91 | 0.74 | 0.50 | 0.93 | 0.97 | 0.93 | 0.80 | 0.56 | 0.94 | 0.97 |
| France | 0.90 | 0.83 | 0.84 | 0.93 | 0.92 | 0.92 | 0.89 | 0.87 | 0.94 | 0.95 |
| Finland | 0.88 | 0.92 | 0.88 | 0.82 | 0.88 | 0.87 | 0.94 | 0.86 | 0.77 | 0.89 |
| Germany | 0.93 | 0.95 | 0.83 | 0.92 | 0.98 | |||||
| Hungary | 0.88 | 0.88 | 0.66 | 0.88 | 0.97 | 0.92 | 0.85 | 0.79 | 0.94 | 0.96 |
| Slovakia | 0.82 | 0.93 | 0.72 | 0.75 | 0.94 | 0.88 | 0.93 | 0.81 | 0.85 | 0.95 |
| Sweden | 0.82 | 0.88 | 0.83 | 0.73 | 0.81 | 0.82 | 0.88 | 0.83 | 0.73 | 0.81 |
| Switzerland | 0.87 | 0.78 | 0.76 | 0.91 | 0.91 | 0.88 | 0.94 | 0.72 | 0.86 | 0.97 |
| Sentinel 1 vs. Reference | Copernicus vs. Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Broadleaf | Coniferous | Broadleaf | Coniferous | |||||||
| OA | PA | UA | PA | UA | OA | PA | UA | PA | UA | |
| Czech Republic | 0.84 | 0.72 | 0.88 | 0.93 | 0.81 | 0.89 | 0.95 | 0.81 | 0.84 | 0.96 |
| England, Scotland, Wales | 0.74 | 0.95 | 0.64 | 0.56 | 0.93 | 0.80 | 0.95 | 0.68 | 0.69 | 0.95 |
| Estonia | 0.87 | 0.77 | 0.97 | 0.97 | 0.79 | |||||
| France | 0.84 | 0.87 | 0.92 | 0.75 | 0.62 | 0.91 | 0.96 | 0.93 | 0.77 | 0.86 |
| Finland | 0.71 | 0.75 | 0.14 | 0.71 | 0.98 | 0.88 | 0.93 | 0.31 | 0.88 | 0.99 |
| Germany | 0.91 | 0.94 | 0.89 | 0.87 | 0.93 | |||||
| Hungary | 0.80 | 0.81 | 0.98 | 0.69 | 0.15 | 0.97 | 0.98 | 0.99 | 0.76 | 0.71 |
| Latvia | 0.85 | 0.68 | 0.90 | 0.70 | 0.90 | |||||
| Slovakia | 0.90 | 0.93 | 0.92 | 0.83 | 0.86 | 0.88 | 0.97 | 0.87 | 0.72 | 0.93 |
| Sweden | 0.82 | 0.45 | 0.16 | 0.84 | 0.96 | 0.79 | 0.87 | 0.21 | 0.79 | 0.99 |
| Switzerland | 0.82 | 0.78 | 0.83 | 0.85 | 0.80 | 0.86 | 0.83 | 0.87 | 0.89 | 0.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dostálová, A.; Lang, M.; Ivanovs, J.; Waser, L.T.; Wagner, W. European Wide Forest Classification Based on Sentinel-1 Data. Remote Sens. 2021, 13, 337. https://doi.org/10.3390/rs13030337
Dostálová A, Lang M, Ivanovs J, Waser LT, Wagner W. European Wide Forest Classification Based on Sentinel-1 Data. Remote Sensing. 2021; 13(3):337. https://doi.org/10.3390/rs13030337
Chicago/Turabian StyleDostálová, Alena, Mait Lang, Janis Ivanovs, Lars T. Waser, and Wolfgang Wagner. 2021. "European Wide Forest Classification Based on Sentinel-1 Data" Remote Sensing 13, no. 3: 337. https://doi.org/10.3390/rs13030337
APA StyleDostálová, A., Lang, M., Ivanovs, J., Waser, L. T., & Wagner, W. (2021). European Wide Forest Classification Based on Sentinel-1 Data. Remote Sensing, 13(3), 337. https://doi.org/10.3390/rs13030337