
Comparison of Remote Sensing Techniques for Geostructural Analysis and Cliff Monitoring in Coastal Areas of High Tourist Attraction: The Case Study of Polignano a Mare (Southern Italy)

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
- What is the best technique in terms of costs and benefits for structural analyses and monitoring?
- Does the type of technology used affect the results of the geostructural characterization and monitoring from point clouds?
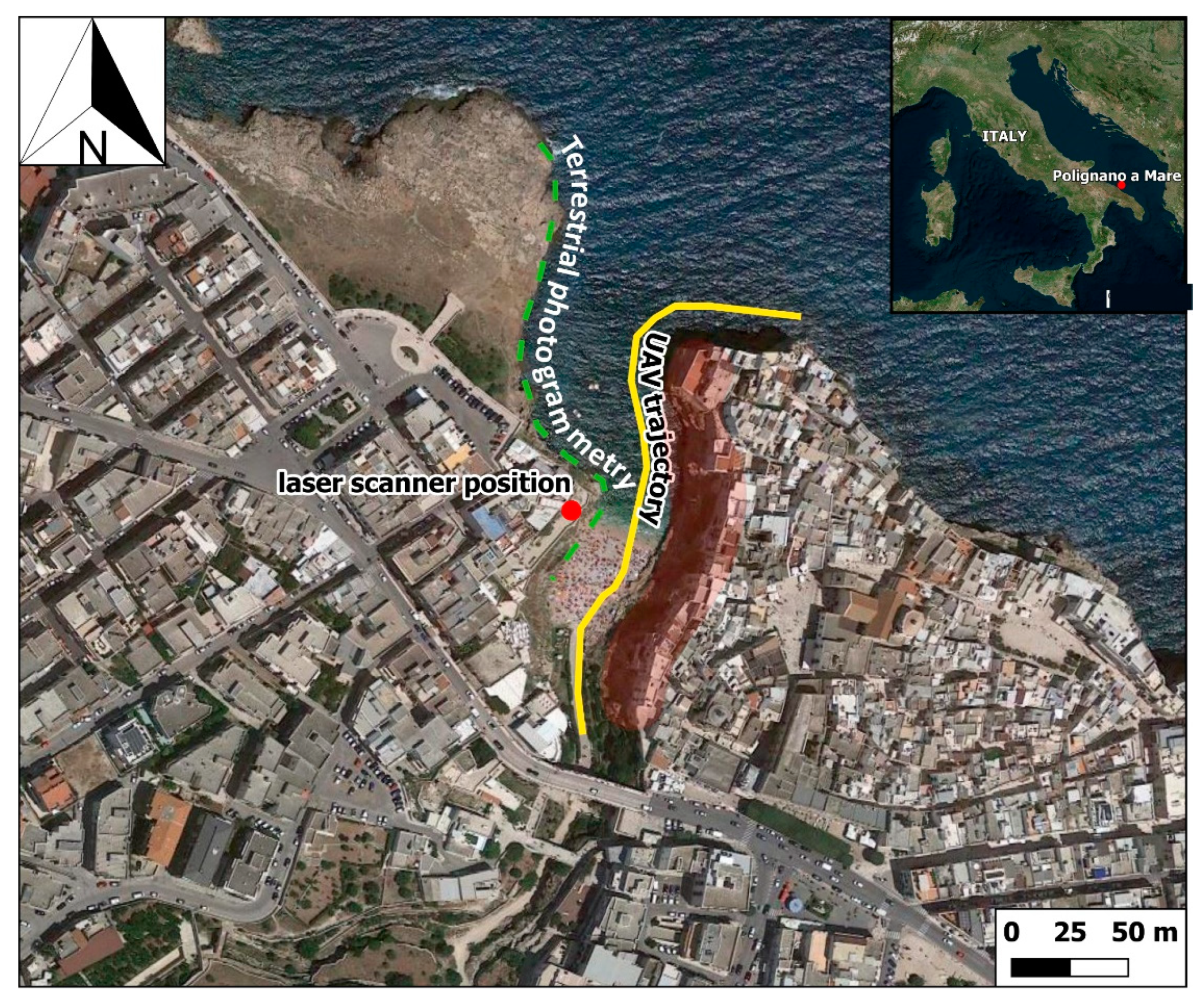
2. Case Study
3. Materials and Methods
3.1. Remote Sensing Acquisition and Processing
3.1.1. Terrestrial Laser Scanning
3.1.2. Structure-from-Motion
Terrestrial SfM Image Acquisition
Unmanned Aerial Vehicle (UAV) Image Acquisition
Processing
- (a)
- Image inspection, importation, and conversion of the coordinates into the WGS84/33 N metric coordinate system.
- (b)
- Insertion of Ground Control Points (GCP): points whose coordinates were taken from the TLS point cloud on well-recognizable surfaces were added to the photos as constraints to roughly georeference the SfM model. Due to the low resolution, only 3 GCPs were identified on well-recognizable elements (i.e., building structures) of the Terrestrial Photogrammetry point cloud, whilst 5 GCPs, evenly distributed in the 3-D scene, were detected on the higher-resolution UAV point cloud. The GCP projection errors of the terrestrial and UAV SfM point clouds are, respectively, summarized in Table 2 and Table 3. For each GCP, the horizontal (Ex, Ey) and vertical (Ez) reprojection errors correspond to the Root Mean Square Error (RMSE) calculated over all the photos where it was visible. The total error for each GCP is given by: .
- (c)
- High-accuracy camera alignment by means of sparse bundle adjustment algorithm [96].
- (d)
- High-quality depth maps calculation and generation of the dense point clouds.
- (e)
- Refinement of the dense point cloud by means of subsampling (minimum distance between points of 1 cm for the UAV point cloud) and direct segmentation.
3.2. Quality Assessment of the Point Clouds
3.3. Comparison of Point Clouds
3.4. Extraction of Discontinuities from Point Clouds
3.5. Rockfall Detection by Means of Multi-Temporal Acquisitions
4. Results and Discussion
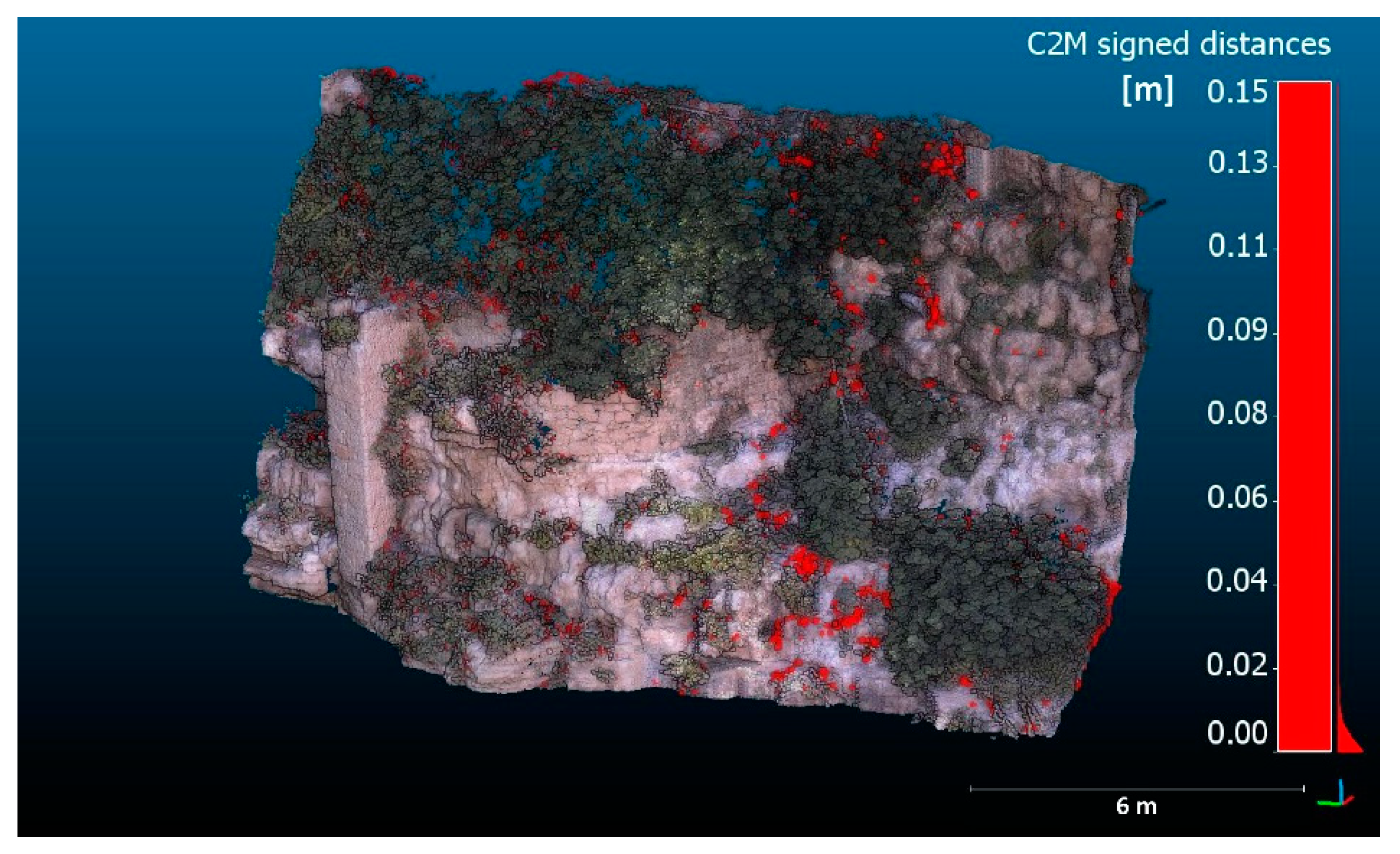
4.1. Comparison of Point Clouds
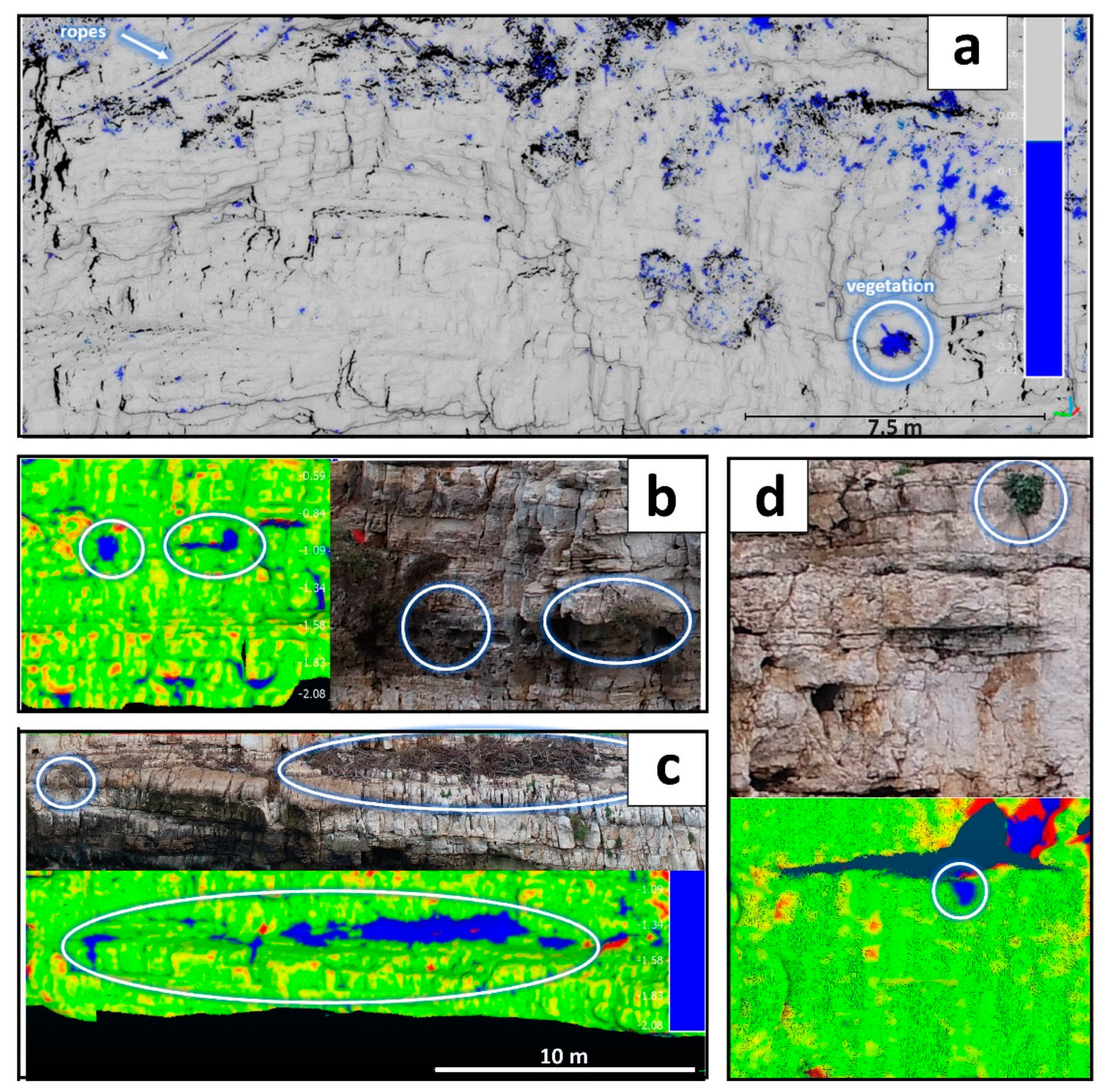
4.2. Quality Assessment of the Point Clouds
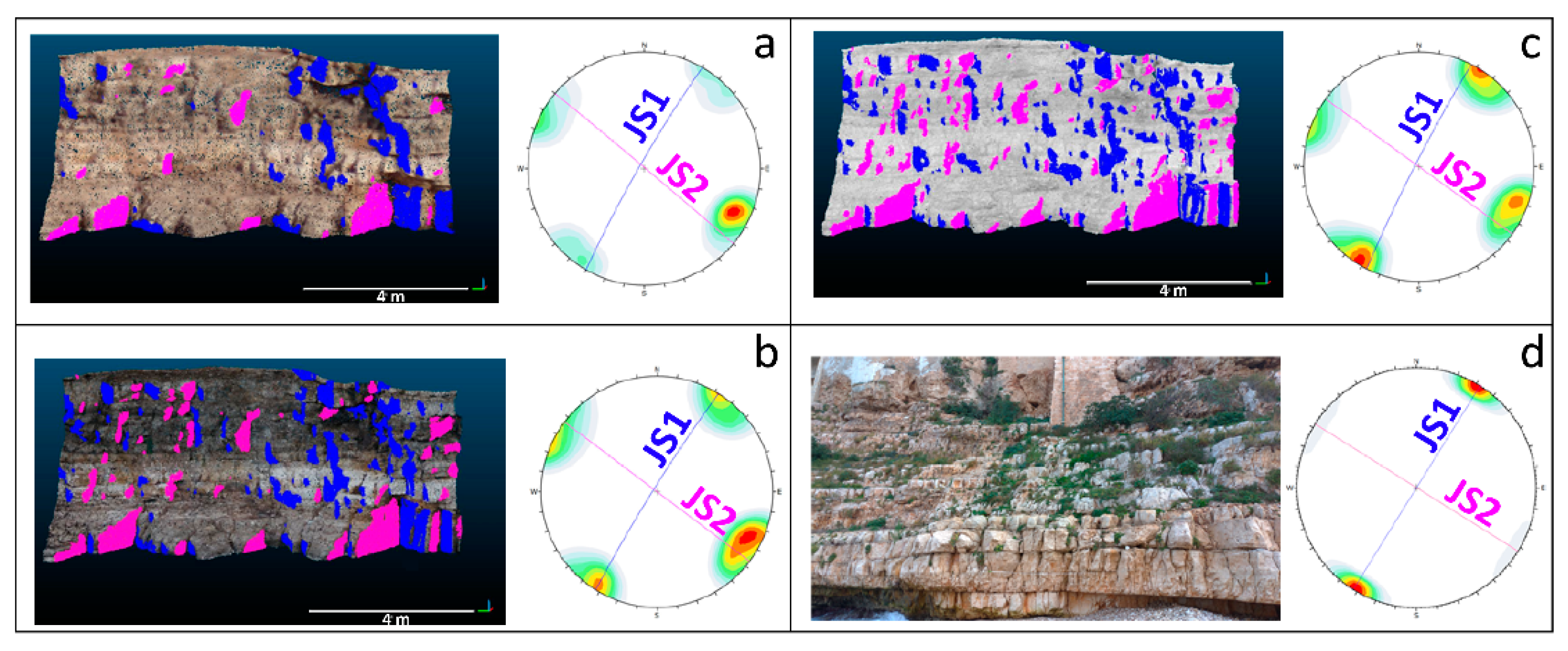
4.3. Extraction of Discontinuities from Point Clouds
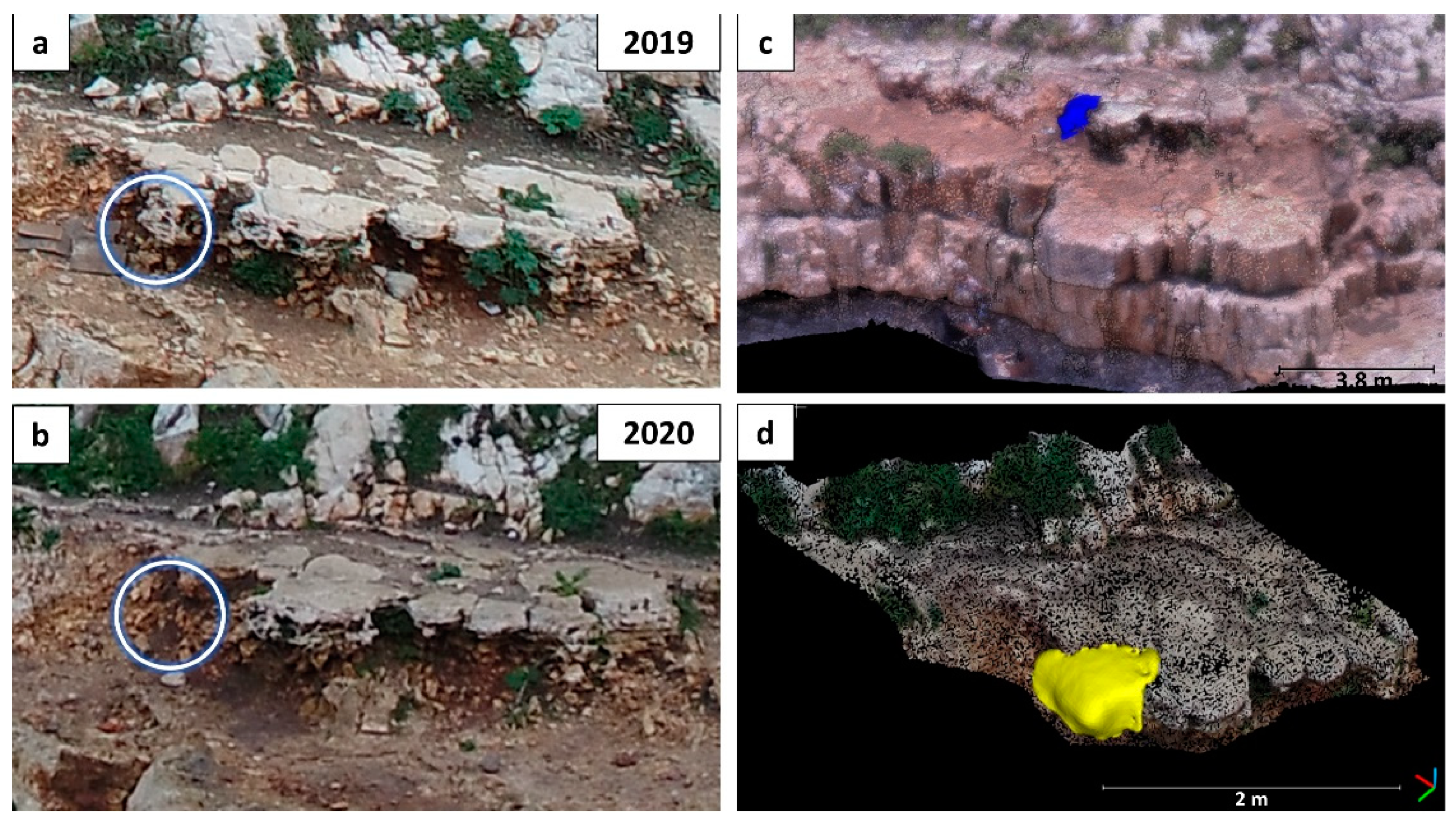
4.4. Rockfall Detection by Means of Multi-Temporal Acquisitions
5. Main Outcomes and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martino, S.; Mazzanti, P. Integrating Geomechanical Surveys and Remote Sensing for Sea Cliff Slope Stability Analysis: The Mt. Pucci Case Study (Italy). Nat. Hazards Earth Syst. Sci. 2014, 14, 831–848. [Google Scholar] [CrossRef] [Green Version]
- Castedo, R.; Murphy, W.; Lawrence, J.; Paredes, C. A New Process-Response Coastal Recession Model of Soft Rock Cliffs. Geomorphology 2012, 177–178, 128–143. [Google Scholar] [CrossRef]
- Pilkey, O.; Davis, T. An Analysis of Coastal Recession Models: North Carolina Coast. Available online: https://pubs.geoscienceworld.org/sepm/books/book/1045/chapter/10534623/An-Analysis-of-Coastal-Recession-ModelsNorth (accessed on 7 December 2021).
- Sunamura, T. Rocky Coast Processes: With Special Reference to the Recession of Soft Rock Cliffs. Proc. Jpn. Acad. Ser. B Phys. Biol. Sci. 2015, 91, 481–500. [Google Scholar] [CrossRef] [Green Version]
- Sunamura, T. The Geomorphology of Rocky Coasts; Wiley: Chichester, UK, 1992. [Google Scholar]
- Walkden, M.; Dickson, M. Equilibrium Erosion of Soft Rock Shores with a Shallow or Absent Beach under Increased Sea Level Rise. Mar. Geol. 2008, 251, 75–84. [Google Scholar] [CrossRef]
- Trenhaile, A.S. The Geomorphology of Rock Coasts; Oxford Research Studies in Geography; Clarendon Press: Oxford, UK, 1987; ISBN 9780198232797. [Google Scholar]
- Bernatchez, P.; Dubois, J.-M.M. Seasonal Quantification of Coastal Processes and Cliff Erosion on Fine Sediment Shorelines in a Cold Temperate Climate, North Shore of the St. Lawrence Maritime Estuary, Québec. J. Coast. Res. 2008, 24, 169–180. [Google Scholar] [CrossRef]
- Rosen, P.S. Erosion Susceptibility of the Virginia Chesapeake Bay Shoreline. Mar. Geol. 1980, 34, 45–59. [Google Scholar] [CrossRef]
- Trenhaile, A.S. Modeling Cohesive Clay Coast Evolution and Response to Climate Change. Mar. Geol. 2010, 277, 11–20. [Google Scholar] [CrossRef]
- Bieniawski, Z.T. The Geomechanics Classification in Rock Engineering Applications; ISRM Congress: Montreux, Switzerland, 1979. [Google Scholar]
- Bieniawski, Z.T. Engineering Rock Mass Classifications; John Wiley and Sons: Chichester, UK, 1989; ISBN 978-0-471-60172-2. [Google Scholar]
- Bieniawski, Z.T. Classification of Rock Masses for Engineering: The RMR System and Future Trends. Compr. Rock Eng. 1993, 3, 553–573. [Google Scholar] [CrossRef]
- Marinos, P.; Hoek, E. GSI-A Geologically Friendly Tool for Rock Mass Strength Estimation. In Proceedings of the International Conference on Geotechnical and Geological Engineering (GeoEng2000), Melbourne, Australia, 19–24 November 2000; pp. 1422–1446. [Google Scholar]
- Barton, N.; Lien, R.; Lunde, J. Engineering Classification of Rock Masses for the Design of Tunnel Support. Rock Mech. Felsmech. Mécanique Des Roches 1974, 6, 189–236. [Google Scholar] [CrossRef]
- Fookes, P.G. Geology for Engineers: The Geological Model, Prediction and Performance. Q. J. Eng. Geol. 1997, 30, 293–424. [Google Scholar] [CrossRef]
- Miroshnikova, L.S. Engineering-Geologic Models as an Effective Method of Schematization of Rock Masses for Purposes of Hydrotechnical Construction. Hydrotech. Constr. 1999, 33, 603–612. [Google Scholar] [CrossRef]
- Stavropoulou, M.; Exadaktylos, G.; Saratsis, G. A Combined Three-Dimensional Geological-Geostatistical-Numerical Model of Underground Excavations in Rock. Rock Mech. Rock Eng. 2007, 40, 213–243. [Google Scholar] [CrossRef]
- Hudson, J.; Harrison, J. Engineering Rock Mechanics: An Introduction to the Principles; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Hoek, E.; Bray, J. Rock Slope Engineering; CRC Press: Boca Raton, FL, USA, 1981. [Google Scholar]
- Goodman, R.E. Methods of Geological Engineering in Discontinuous Rocks; West Pub. Co.: St. Paul, MN, USA, 1976; ISBN 0829900667. [Google Scholar]
- Priest, S.D. Discontinuity Analysis for Rock Engineering; Chapman & Hall: London, UK, 1993. [Google Scholar]
- Jing, L. A Review of Techniques, Advances and Outstanding Issues in Numerical Modelling for Rock Mechanics and Rock Engineering. Int. J. Rock Mech. Min. Sci. 2003, 40, 283–353. [Google Scholar] [CrossRef]
- Jing, L.; Hudson, J.A. Numerical Methods in Rock Mechanics. Int. J. Rock Mech. Min. Sci. 2002, 39, 409–427. [Google Scholar] [CrossRef]
- Barla, G.; Barla, M. Continuum and Discontinuum Modelling in Tunnel Engineering. Rud. Geol. Naft. Zb. 2000, 12, 45–57. [Google Scholar]
- Lisjak, A.; Grasselli, G. A Review of Discrete Modeling Techniques for Fracturing Processes in Discontinuous Rock Masses. J. Rock Mech. Geotech. Eng. 2014, 6, 301–314. [Google Scholar] [CrossRef] [Green Version]
- Franklin, J.A.; Maerz, N.H.; Bennett, C.P. Rock Mass Characterization Using Photoanalysis. Int. J. Min. Geol. Eng. 1988, 6, 97–112. [Google Scholar] [CrossRef]
- Slob, S.; van Knapen, B.; Hack, R.; Turner, K.; Kemeny, J. Method for Automated Discontinuity Analysis of Rock Slopes with Three-Dimensional Laser Scanning. Transp. Res. Rec. J. Transp. Res. Board 2005, 1913, 187–194. [Google Scholar] [CrossRef]
- Pollyea, R.M.; Fairley, J.P. Estimating Surface Roughness of Terrestrial Laser Scan Data Using Orthogonal Distance Regression. Geology 2011, 39, 623–626. [Google Scholar] [CrossRef]
- Fardin, N.; Feng, Q.; Stephansson, O. Application of a New in Situ 3D Laser Scanner to Study the Scale Effect on the Rock Joint Surface Roughness. Int. J. Rock Mech. Min. Sci. 2004, 41, 329–335. [Google Scholar] [CrossRef]
- Teza, G.; Galgaro, A.; Zaltron, N.; Genevois, R. Terrestrial Laser Scanner to detect landslide displacement fields: A new approach. Int. J. Remote Sens. 2007, 28, 3425–3446. [Google Scholar] [CrossRef]
- Viero, A.; Teza, G.; Massironi, M.; Jaboyedoff, M.; Galgaro, A. Laser Scanning-Based Recognition of Rotational Movements on a Deep Seated Gravitational Instability: The Cinque Torri Case (North-Eastern Italian Alps). Geomorphology 2010, 122, 191–204. [Google Scholar] [CrossRef]
- Mavrouli, O.; Corominas, J.; Jaboyedoff, M. Size Distribution for Potentially Unstable Rock Masses and In Situ Rock Blocks Using LIDAR-Generated Digital Elevation Models. Rock Mech. Rock Eng. 2015, 48, 1589–1604. [Google Scholar] [CrossRef] [Green Version]
- Rosser, N.J.; Petley, D.N.; Lim, M.; Dunning, S.A.; Allison, R.J. Terrestrial Laser Scanning for Monitoring the Process of Hard Rock Coastal Cliff Erosion. Q. J. Eng. Geol. Hydrogeol. 2005, 38, 363–375. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward Reconstruction of 3D Surfaces and Topography with a Camera: Accuracy and Geoscience Application. J. Geophys. Res. Earth Surf. 2012, 117, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Slob, S.; Hack, R. 3D Terrestrial Laser Scanning as a New Field Measurement and Monitoring Technique. In Engineering Geology for Infrastructure Planning in Europe; Hack, R., Azzam, R., Charlier, R., Eds.; Lecture Notes in Earth Sciences; Springer: Berlin/Heidelberg, Germany, 2004; Volume 104. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Tofani, V.; Segoni, S.; Agostini, A.; Catani, F.; Casagli, N. Technical Note: Use of Remote Sensing for Landslide Studies in Europe. Nat. Hazards Earth Syst. Sci. 2013, 13, 299–309. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial Laser Scanning of Rock Slope Instabilities. Earth Surf. Process. Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Abellan, A.; Derron, M.H.; Jaboyedoff, M. Use of 3D Point Clouds in Geohazards. Special Issue: Current Challenges and Future Trends. Remote Sens. 2016, 8, 130. [Google Scholar] [CrossRef] [Green Version]
- Slob, S.; Hack, H.R.G.K.; Feng, Q.; Roshoff, K.; Turner, A.K. Fracture Mapping Using 3D Laser Scanning Techniques. In Proceedings of the 11th ISRM Congress, Lisbon, Portugal, 9 July 2007. [Google Scholar]
- Jaboyedoff, M.; Metzger, R.; Oppikofer, T.; Couture, R.; Derron, M.; Locat, J.; Turmel, D. New Insight Techniques to Analyze Rock-Slope Relief Using DEM and 3D-Imaging Cloud Points. In Rock Mechanics: Meeting Society’s Challenges and Demands; Taylor & Francis: London, UK, 2007; pp. 61–68. [Google Scholar]
- Olariu, M.I.; Ferguson, J.F.; Aiken, C.L.V.; Xu, X. Outcrop Fracture Characterization Using Terrestrial Laser Scanners: Deep-Water Jackfork Sandstone at Big Rock Quarry, Arkansas. Geosphere 2008, 4, 247–259. [Google Scholar] [CrossRef]
- Gigli, G.; Casagli, N. Semi-Automatic Extraction of Rock Mass Structural Data from High Resolution LIDAR Point Clouds. Int. J. Rock Mech. Min. Sci. 2011, 48, 187–198. [Google Scholar] [CrossRef]
- García-Sellés, D.; Falivene, O.; Arbués, P.; Gratacos, O.; Tavani, S.; Muñoz, J.A. Supervised Identification and Reconstruction of Near-Planar Geological Surfaces from Terrestrial Laser Scanning. Comput. Geosci. 2011, 37, 1584–1594. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A New Approach for Semi-Automatic Rock Mass Joints Recognition from 3D Point Clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Buyer, A.; Schubert, W. Extraction of Discontinuity Orientations in Point Clouds. In Proceedings of the ISRM International Symposium—EUROCK 2016, International Society for Rock Mechanics. Ürgüp, Turkey, 29 August 2016; pp. 1133–1137. [Google Scholar]
- Palma, B.; Parise, M.; Ruocco, A. Geo-Mechanical Characterization of Carbonate Rock Masses by Means of Laser Scanner Technique. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 062007. [Google Scholar] [CrossRef]
- Lato, M.J.; Vöge, M. Automated Mapping of Rock Discontinuities in 3D Lidar and Photogrammetry Models. Int. J. Rock Mech. Min. Sci. 2012, 54, 150–158. [Google Scholar] [CrossRef]
- Vöge, M.; Lato, M.J.; Diederichs, M.S. Automated Rockmass Discontinuity Mapping from 3-Dimensional Surface Data. Eng. Geol. 2013, 164, 155–162. [Google Scholar] [CrossRef]
- Li, X.; Chen, J.; Zhu, H. A New Method for Automated Discontinuity Trace Mapping on Rock Mass 3D Surface Model. Comput. Geosci. 2016, 89, 118–131. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Tomás, R.; Abellán, A. Characterization of Rock Slopes through Slope Mass Rating Using 3D Point Clouds. Int. J. Rock Mech. Min. Sci. 2016, 84, 165–176. [Google Scholar] [CrossRef] [Green Version]
- Sturzenegger, M.; Stead, D.; Elmo, D. Terrestrial Remote Sensing-Based Estimation of Mean Trace Length, Trace Intensity and Block Size/Shape. Eng. Geol. 2011, 119, 96–111. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R. Discontinuity Spacing Analysis in Rock Masses Using 3D Point Clouds. Eng. Geol. 2015, 195, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Riquelme, A.; Tomás, R.; Cano, M.; Pastor, J.L.; Abellán, A. Automatic Mapping of Discontinuity Persistence on Rock Masses Using 3D Point Clouds. Rock Mech. Rock Eng. 2018, 51, 3005–3028. [Google Scholar] [CrossRef]
- Buyer, A.; Schubert, W. Calculation the Spacing of Discontinuities from 3D Point Clouds. In Proceedings of the ISRM European Rock Mechanics Symposium—EUROCK 2017, Ostrava, Czech Republic, 20 June 2017. [Google Scholar]
- Buyer, A.; Schubert, W. Joint Trace Detection in Digital Images. In Proceedings of the 10th Asian Rock Mechanics Symposium, Singapore, 29 October 2018. [Google Scholar]
- Kong, D.; Wu, F.; Saroglou, C. Automatic Identification and Characterization of Discontinuities in Rock Masses from 3D Point Clouds. Eng. Geol. 2020, 265, 105442. [Google Scholar] [CrossRef]
- Kong, D.; Saroglou, C.; Wu, F.; Sha, P.; Li, B. Development and Application of UAV-SfM Photogrammetry for Quantitative Characterization of Rock Mass Discontinuities. Int. J. Rock Mech. Min. Sci. 2021, 141, 104729. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Pedrazzini, A.; Derron, M.H.; Blikra, L.H. Detailed DEM Analysis of a Rockslide Scar to Characterize the Basal Sliding Surface of Active Rockslides. J. Geophys. Res. Earth Surf. 2011, 116, 2016. [Google Scholar] [CrossRef]
- Battulwar, R.; Zare-Naghadehi, M.; Emami, E.; Sattarvand, J. A State-of-the-Art Review of Automated Extraction of Rock Mass Discontinuity Characteristics Using Three-Dimensional Surface Models. J. Rock Mech. Geotech. Eng. 2021, 13, 920–936. [Google Scholar] [CrossRef]
- Haneberg, W.; Findley, D. Digital Outcrop Characterization for 3-D Structural Mapping and Rock Slope Design Along Interstate 90 Near Snoqualmie Pass. In Proceedings of the 57th Annual Highway Geology Symposium, Breckenridge, CO, USA, 27–29 September 2006. [Google Scholar]
- Feng, Q.H.; Röshoff, K. In-Situ Mapping and Documentation of Rock Faces Using a Full-Coverage 3d Laser Scanning Technique. Int. J. Rock Mech. Min. Sci. 2004, 41, 139–144. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Minoia, R.; Locat, J.; Turmel, D. Terrestrial Lidar Investigation of the 2004 Rockslide along Petit Champlain Street, Québec City (Quebec, Canada). Available online: https://www.researchgate.net/publication/265650529_Terrestrial_Lidar_investigation_of_the_2004_rockslide_along_Petit_Champlain_Street_Quebec_City_Quebec_Canada (accessed on 7 December 2021).
- Sturzenegger, M.; Stead, D. Close-Range Terrestrial Digital Photogrammetry and Terrestrial Laser Scanning for Discontinuity Characterization on Rock Cuts. Eng. Geol. 2009, 106, 163–182. [Google Scholar] [CrossRef]
- Ford, D.; Williams, P. Karst Hydrogeology and Geomorphology. Karst Hydrogeol. Geomorphol. 2013, 1–562. [Google Scholar] [CrossRef]
- Steidtmann, E. The Evolution of Limestone and Dolomite. I. J. Geol. 1911, 19, 323–345. [Google Scholar] [CrossRef]
- Palmer, A.N. Cave geology and speleogenesis over the past 65 years: Role of the National Speleological Society in advancing the science. J. Cave Karst Stud. 2017, 69, 3–12. [Google Scholar]
- Andriani, G.; Parise, M.; Diprizio, G. Uncertainties in the Application of Rock Mass Classification and Geomechanical Models for Engineering Design in Carbonate Rocks. In Engineering Geology for Society and Territory, 5. Urban Geology, Sustainable Planning and Landscape Exploitation; Lollino, G., Manconi, A., Guzzetti, F., Culshaw, M., Bobrowsky, P., Luino, F., Eds.; Springer: Berlin, Germany, 2015; pp. 545–548. ISBN 978-3-319-09048-1. [Google Scholar]
- Parise, M.; Closson, D.; Gutiérrez, F.; Stevanović, Z. Anticipating and Managing Engineering Problems in the Complex Karst Environment. Environ. Earth Sci. 2015, 74, 7823–7835. [Google Scholar] [CrossRef]
- Waltham, T. The Engineering Classification of Karst with Respect to the Role and Influence of Caves. Int. J. Speleol. 2002, 31, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Andriani, G.F.; Parise, M. Applying Rock Mass Classifications to Carbonate Rocks for Engineering Purposes with a New Approach Using the Rock Engineering System. J. Rock Mech. Geotech. Eng. 2017, 9, 364–369. [Google Scholar] [CrossRef]
- Andriani, G.F.; Parise, M. On the Applicability of Geomechanical Models for Carbonate Rock Masses Interested by Karst Processes. Environ. Earth Sci. 2015, 74, 7813–7821. [Google Scholar] [CrossRef]
- Milanovic, P. The Environmental Impacts of Human Activities and Engineering Constructions in Karst Regions. Episodes 2002, 25, 13–21. [Google Scholar] [CrossRef]
- Pagano, M.; Palma, B.; Ruocco, A.; Parise, M. Discontinuity Characterization of Rock Masses through Terrestrial Laser Scanner and Unmanned Aerial Vehicle Techniques Aimed at Slope Stability Assessment. Appl. Sci. 2020, 10, 2960. [Google Scholar] [CrossRef]
- Terranum, Coltop3D. 2020. Software. Available online: https://www.terranum.ch (accessed on 20 November 2021).
- Discontinuity Set Extractor. 2020. Software. Available online: https://sourceforge.net/projects/discontinuity-set-extractor/ (accessed on 12 August 2021).
- Ferrero, A.M.; Forlani, G.; Roncella, R.; Voyat, H.I. Advanced Geostructural Survey Methods Applied to Rock Mass Characterization. Rock. Mech. Rock. Eng. 2009, 42, 631–665. [Google Scholar] [CrossRef]
- Parise, M. Surface and subsurface karst geomorphology in the Murge (Apulia, southern Italy). Acta Carsolog. 2011, 40, 79–93. [Google Scholar] [CrossRef]
- Ciaranfi, N.; Pieri, P.; Ricchetti, G. Note Alla Carta Geologica Delle Murge e Del Salento (Puglia Centromeridionale). Mem. Della Soc. Geol. Ital. 1988, 41, 449–460. [Google Scholar]
- Doglioni, C.; Mongelli, F.; Pieri, P. The Puglia Uplift (SE Italy): An Anomaly in the Foreland of the Apenninic Subduction Due to Buckling of a Thick Continental Lithosphere. Tectonics 1994, 13, 1309–1321. [Google Scholar] [CrossRef]
- Parise, M. Geomorphology of the Canale Di Pirro Karst Polje (Apulia, Southern Italy). Z. Fur Geomorphol. 2006, 147, 143–158. [Google Scholar]
- Mastronuzzi, G.; Sansò, P. Pleistocene Sea-Level Changes, Sapping Processes and Development of Valley Networks in the Apulia Region (Southern Italy). Geomorphology 2002, 46, 19–34. [Google Scholar] [CrossRef]
- Bruno, G.; del Gaudio, V.; Mascia, U.; Ruina, G. Numerical Analysis of Morphology in Relation to Coastline Variations and Karstic Phenomena in the Southeastern Murge (Apulia, Italy). Geomorphology 1995, 12, 313–322. [Google Scholar] [CrossRef]
- Parise, M.; Federico, A.; Delle Rose, M.; Sammarco, M. Karst Terminology from Apulia (Southern Italy). Acta Carsolog. 2016, 32. [Google Scholar] [CrossRef]
- Parise, M. Flood History in the Karst Environment of Castellana-Grotte (Apulia, Southern Italy). Nat. Hazards Earth Syst. Sci. 2003, 3, 593–604. [Google Scholar] [CrossRef]
- Parise, M.; Ravbar, N.N.; Živanović, V.; Mikszewski, A.; Kresic, N.; Mádl-Szőnyi, J.; Kukuric, N.; Kukurić, N. Hazards in Karst and Managing Water Resources Quality. In Karst Aquifers—Characterization and Engineering; Professional Practice in Earth Sciences; Stevanović, Z., Ed.; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Martinotti, M.E.; Pisano, L.; Marchesini, I.; Rossi, M.; Peruccacci, S.; Brunetti, M.T.; Melillo, M.; Amoruso, G.; Loiacono, P.; Vennari, C.; et al. Landslides, Floods and Sinkholes in a Karst Environment: The 1-6 September 2014 Gargano Event, Southern Italy. Nat. Hazards Earth Syst. Sci. 2017, 17, 467–480. [Google Scholar] [CrossRef] [Green Version]
- Sauro, U. A Polygonal Karst in Alte Murge (Puglia, Southern Italy). Z. Fur Geomorphol. 1991, 35, 207–223. [Google Scholar] [CrossRef]
- Rudnicki, J. Origin of the Collapse-Solution Breccia and Its Importance in Phreatic System of Karst Circulation. Bull. Acad. Polon. Sci. 1973, 21, 225–232. [Google Scholar]
- Andriani, G.; Pellegrini, V. Qualitative Assessment of the Cliff Instability Susceptibility at a given Scale with a New Multidirectional Method. Int. J. Geol. 2014, 8, 73–80. [Google Scholar]
- Lollino, P.; Martimucci, V.; Parise, M. Geological Survey and Numerical Modeling of the Potential Failure Mechanisms of Underground Caves. Geosyst. Eng. 2013, 16, 100–112. [Google Scholar] [CrossRef]
- RIEGL. RIEGLVZ-400 Terrestrial Laser Scanner, Summary Specification Sheets. 2017. Available online: Http://Www.Riegl.Com/Uploads/Tx_pxpriegldownloads/10_DataSheet_VZ-400_2017-06-14.Pdf_2017 (accessed on 11 April 2021).
- Agisoft. General Image Capture Tips. 2020. Available online: Https://Agisoft.Freshdesk.Com/Support/Solutions/Articles/31000149337-General-Image-Capture-Tips (accessed on 11 October 2021).
- Agisoft Agisoft Metashape. User Manual: Professional Edition, Version 1.6 2020, 160. Available online: https://www.agisoft.com/downloads/user-manuals/ (accessed on 12 October 2021).
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the World from Internet Photo Collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef] [Green Version]
- Loiotine, L.; Wolff, C.; Wyser, E.; Andriani, G.F.; Derron, M.-H.; Jaboyedoff, M.; Parise, M. QDC-2D: A Semi-Automatic Tool for 2D Analysis of Discontinuities for Rock Mass Characterization. Remote Sens. Spec. Issue 3d Point Clouds Rock Mech. Appl. 2021. accepted. [Google Scholar]
- Andriani, G.F.; Walsh, N. Rocky Coast Geomorphology and Erosional Processes: A Case Study along the Murgia Coastline South of Bari, Apulia—SE Italy. Geomorphology 2007, 87, 224–238. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2 August 1996; Volume 96, pp. 226–231. [Google Scholar]
- Guerin, A.; Abellán, A.; Matasci, B.; Jaboyedoff, M.; Derron, M.H.; Ravanel, L. Brief Communication: 3-D Reconstruction of a Collapsed Rock Pillar from Web-Retrieved Images and Terrestrial Lidar Data-the 2005 Event of the West Face of the Drus (Mont Blanc Massif). Nat. Hazards Earth Syst. Sci. 2017, 17, 1207–1220. [Google Scholar] [CrossRef] [Green Version]
- Guerin, A.; Stock, G.M.; Radue, M.J.; Jaboyedoff, M.; Collins, B.D.; Matasci, B.; Avdievitch, N.; Derron, M.H. Quantifying 40 years of Rockfall Activity in Yosemite Valley with Historical Structure-from-Motion Photogrammetry and Terrestrial Laser Scanning. Geomorphology 2020, 356, 107069. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Kazhdan, M.; Hoppe, H. Screened Poisson Surface Reconstruction. ACM Trans. Graph. 2013, 32, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Rosnell, T.; Honkavaara, E. Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- James, M.R.; Robson, S. Mitigating Systematic Error in Topographic Models Derived from UAV and Ground-Based Image Networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the Topography of Shallow Braided Rivers Using Structure-from-Motion Photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Ruggles, S.; Clark, J.; Franke, K.W.; Wolfe, D.; Reimschiissel, B.; Martin, R.A.; Okeson, T.J.; Hedengren, J.D. Comparison of Sfm Computer Vision Point Clouds of a Landslide Derived from Multiple Small Uav Platforms and Sensors to a Tls-Based Model. J. Unmanned Veh. Syst. 2016, 4, 246–265. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D Terrestrial Lidar Data Classification of Complex Natural Scenes Using a Multi-Scale Dimensionality Criterion: Applications in Geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Stead, D.; Donati, D.; Wolter, A.; Sturzenegger, M. Application of Remote Sensing to the Investigation of Rock Slopes: Experience Gained and Lessons Learned. ISPRS Int. J. Geo-Inf. 2019, 8, 296. [Google Scholar] [CrossRef] [Green Version]
- Abellán, A.; Jaboyedoff, M.; Oppikofer, T.; Vilaplana, J.M. Detection of Millimetric Deformation Using a Terrestrial Laser Scanner: Experiment and Application to a Rockfall Event. Nat. Hazards Earth Syst. Sci. 2009, 9, 365–372. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV SYSTEM | |
|---|---|
| UAV device | DJI Inspire 2 |
| Maximum take-off weight (g) | 4250 g |
| Maximum flight time (min) | 27 |
| Gimbal stabilization | 3-axis (pitch, roll, yaw) |
| ON-BOARD CAMERA PARAMETERS AND SETTING | |
| Camera model | Zenmuse X5S |
| Supported lens | DJI MFT 15 mm 1.7 ASPH |
| Sensor | CMOS, 4/3″ Effective Pixels: 20.8 MP |
| FOV | 72° |
| Photo resolution (pix) | 5280 × 3956 |
| SURVEY DETAILS | |
| Flight mode | manual |
| Ground Sampling distance (cm/pix) | 0.41 |
| Coverage area (km2) | 0.00546 |
| Frontal distance from the cliff (m) | 18 |
| Number of photos | 130 |
| Front overlap (%) | 75 |
| Side overlap (%) | 85 |
| Frame shooting interval (s) | 1.5 |
| Number of tie-points | 311,321 |
| Number of projections | 2,290,325 |
| Reprojection error (pix) | 0.541 |
| GCPs XY error (m) | 0.097 |
| GCPs Z error (m) | 0.001 |
| Total GCPs error (m) | 0.010 |
| GCP ID | Number of Images | Horizontal Errors (cm) | Vertical Errors (cm) | Total Error | ||
|---|---|---|---|---|---|---|
| X | Y | Z | cm | pix | ||
| GCPa | 49 | −0.41 | 1.26 | −0.17 | 1.33 | 2.45 |
| GCPb | 55 | 0.27 | −3.09 | 0.69 | 3.18 | 1.15 |
| GCPc | 48 | 0.14 | 1.84 | −0.52 | 1.91 | 0.94 |
| Total | 0.29 | 2.20 | 0.51 | 2.28 | 1.64 | |
| GCP ID | Number of Images | Horizontal Errors (cm) | Vertical Errors (cm) | Total Error | ||
|---|---|---|---|---|---|---|
| X | Y | Z | cm | pix | ||
| GCP1 | 18 | 0.76 | −0.96 | 0.15 | 0.12 | 1.27 |
| GCP2 | 29 | 0.00 | 0.63 | 0.04 | 0.63 | 0.68 |
| GCP3 | 57 | 0.04 | 0.10 | 0.03 | 0.11 | 0.40 |
| GCP4 | 29 | −0.44 | 0.63 | 0.15 | 0.79 | 0.24 |
| GCP5 | 49 | −0.35 | 0.70 | −0.51 | 0.94 | 0.23 |
| Total | 0.42 | 0.80 | 0.29 | 0.95 | 0.56 | |
| Acquisition Method | Number of Scans | Number of Aligned Photos | Number of Targets/GCPs | Image Pixel Size | Total Reprojection Error of the GCPs | Number of Points in the Point Cloud | Surface Density of the Point Cloud | Average Point Spacing | Number of Points after Sub-Sampling and Cleaning |
|---|---|---|---|---|---|---|---|---|---|
| Terrestrial photogrammetry | / | 109/109 | 3 | 1.41 cm/pix | 2.28 cm | 20,457,182 | 1507 points/m2 | 2.5 cm | 6,701,071 |
| TLS | 1 | / | 5 | / | / | 62,861,985 | 6852 points/m2 | 1.2 cm | 24,196,954 |
| UAV | / | 125/125 | 5 | 0.95 cm/pix | 0.95 cm | 52,363,336 | 5244 points/m2 | 1.3 cm | 21,849,920 |
| PLANE 1 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 291/87 | 0.000 | 0.007 |
| Terrestrial Laser Scanning | 291/86 | 0.000 | 0.010 |
| Unmanned Aerial Vehicle | 291/86 | 0.000 | 0.009 |
| PLANE 2 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 78/89 | 0.000 | 0.016 |
| Terrestrial Laser Scanning | 78/88 | 0.000 | 0.009 |
| Unmanned Aerial Vehicle | 78/88 | 0.000 | 0.015 |
| PLANE 3 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 99/88 | 0.000 | 0.039 |
| Terrestrial Laser Scanning | 98/88 | 0.000 | 0.005 |
| Unmanned Aerial Vehicle | 97/87 | 0.000 | 0.011 |
| PLANE 4 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 283/86 | 0.000 | 0.009 |
| Terrestrial Laser Scanning | 283/86 | 0.000 | 0.006 |
| Unmanned Aerial Vehicle | 284/86 | 0.000 | 0.009 |
| PLANE 5 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 104/89 | −0.000 | 0.012 |
| Terrestrial Laser Scanning | 104/88 | −0.000 | 0.006 |
| Unmanned Aerial Vehicle | 104/87 | −0.000 | 0.009 |
| PLANE 6 | |||
| Type of Point Cloud | Measured dip direction/dip | Mean CtM distance (m) | Mean st. dev. (m) |
| Terrestrial Photogrammetry | 307/84 | −0.000 | 0.020 |
| Terrestrial Laser Scanning | 307/84 | −0.000 | 0.002 |
| Unmanned Aerial Vehicle | 306/84 | 0.000 | 0.010 |
| Acquisition Technique | JS1 | JS2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Dip Direction | Dip | Fisher’s K | Weight % | Dip Direction | Dip | Fisher’s K | Weight % | |
| TLS (21,828 poles) | 301 | 86 | 40 | 48.55 | 216 | 90 | 41 | 51.45 |
| Photogrammetry (8690 poles) | 300 | 85 | 42 | 66.60 | 40 | 89 | 48 | 33.40 |
| UAV (16,697 poles) | 302 | 86 | 37 | 57.62 | 217 | 90 | 44 | 42.38 |
| Field measurements (216 poles) | 301 | 90 | 59 | 33.93 | 212 | 90 | 216 | 66.07 |
| Data from geostructural analysis | ||||||||
| Technique | Dip dir. ° | Dip ° | Density | % | Persistence (m) | Spacing (m) | ||
| mean | max | persistent | non-persistent | |||||
| TLS (24,779 poles) | 282.73 | 87.14 | 0.70 | 30.86 | 0.34 | 2.05 | 0.14 | 0.04 |
| Photogrammetry (4784 poles) | 283.28 | 70.69 | 1.79 | 39.87 | 0.68 | 5.37 | 0.62 | 0.40 |
| UAV (17,123 poles) | 108.17 | 86.84 | 0.37 | 26.59 | 0.42 | 2.61 | 0.19 | 0.06 |
| Differences | ||||||||
| Compared dataset | Dip dir. ° | Dip ° | Density | % | Persistence (m) | Spacing (m) | ||
| mean | max | persistent | non-persistent | |||||
| TLS-photogrammetry | 0.55 | 16.45 | 1.09 | 9.01 | 0.35 | 3.32 | 0.48 | 0.36 |
| TLS-UAV | 174.56 | 0.30 | 0.34 | 4.27 | 0.08 | 0.56 | 0.05 | 0.02 |
| UAV-photogrammetry | 175.11 | 16.15 | 1.42 | 13.28 | 0.27 | 2.77 | 0.44 | 0.34 |
| Data from geostructural analysis | ||||||||
| Technique | Dip dir. ° | Dip ° | Density | % | Persistence (m) | Mean spacing (m) | ||
| mean | max | persistent | non-persistent | |||||
| TLS (16380 poles) | 31.18 | 87.96 | 1.08 | 20.40 | 0.34 | 2.02 | 0.20 | 0.08 |
| Photogrammetry (578 poles) | 35.24 | 86.97 | 0.42 | 6.96 | 0.50 | 1.64 | 0.62 | 0.40 |
| UAV (9325 poles) | 29.35 | 90.00 | 0.48 | 14.48 | 0.40 | 1.92 | 0.27 | 0.13 |
| Differences | ||||||||
| Compared dataset | Dip dir. ° | Dip ° | Density | % | Persistence (m) | Mean spacing (m) | ||
| mean | max | persistent | non-persistent | |||||
| TLS-photogrammetry | 4.06 | 0.99 | 0.66 | 13.44 | 0.16 | 0.38 | 0.42 | 0.32 |
| TLS-UAV | 1.83 | 2.04 | 0.60 | 5.92 | 0.06 | 0.10 | 0.07 | 0.05 |
| UAV-photogrammetry | 5.89 | 3.03 | 0.07 | 7.52 | 0.10 | 0.28 | 0.35 | 0.27 |
| JS1 | JS2 | |||||||
|---|---|---|---|---|---|---|---|---|
| Dip direction | Dip | Dip direction | Dip | |||||
| COLTOP3D | DSE | COLTOP3D | DSE | COLTOP3D | DSE | COLTOP3D | DSE | |
| TLS | 301 | 283 | 86 | 87 | 216 | 31 | 90 | 88 |
| Photogrammetry | 300 | 283 | 85 | 71 | 40 | 35 | 89 | 87 |
| UAV | 302 | 108 | 86 | 87 | 217 | 29 | 90 | 90 |
| Field measurements | 301 | 90 | 212 | 90 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loiotine, L.; Andriani, G.F.; Jaboyedoff, M.; Parise, M.; Derron, M.-H. Comparison of Remote Sensing Techniques for Geostructural Analysis and Cliff Monitoring in Coastal Areas of High Tourist Attraction: The Case Study of Polignano a Mare (Southern Italy). Remote Sens. 2021, 13, 5045. https://doi.org/10.3390/rs13245045
Loiotine L, Andriani GF, Jaboyedoff M, Parise M, Derron M-H. Comparison of Remote Sensing Techniques for Geostructural Analysis and Cliff Monitoring in Coastal Areas of High Tourist Attraction: The Case Study of Polignano a Mare (Southern Italy). Remote Sensing. 2021; 13(24):5045. https://doi.org/10.3390/rs13245045
Chicago/Turabian StyleLoiotine, Lidia, Gioacchino Francesco Andriani, Michel Jaboyedoff, Mario Parise, and Marc-Henri Derron. 2021. "Comparison of Remote Sensing Techniques for Geostructural Analysis and Cliff Monitoring in Coastal Areas of High Tourist Attraction: The Case Study of Polignano a Mare (Southern Italy)" Remote Sensing 13, no. 24: 5045. https://doi.org/10.3390/rs13245045
APA StyleLoiotine, L., Andriani, G. F., Jaboyedoff, M., Parise, M., & Derron, M.-H. (2021). Comparison of Remote Sensing Techniques for Geostructural Analysis and Cliff Monitoring in Coastal Areas of High Tourist Attraction: The Case Study of Polignano a Mare (Southern Italy). Remote Sensing, 13(24), 5045. https://doi.org/10.3390/rs13245045