
An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar




Abstract
:1. Introduction
2. Signal Model and Problem Analysis
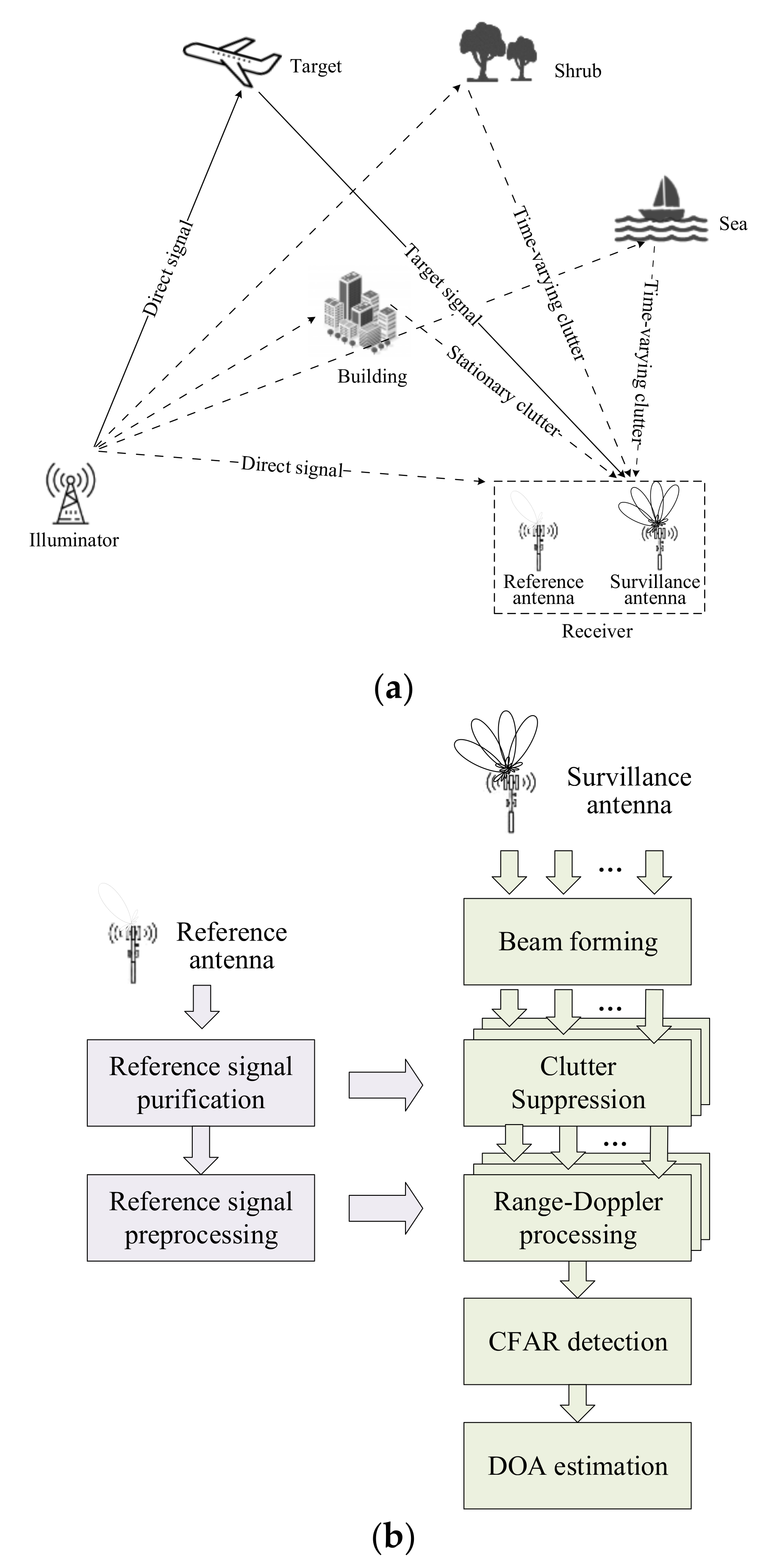
2.1. Signal Model
2.2. PBR Target Detection
3. ECA and ECA-B Analysis
3.1. ECA Analysis
3.2. ECA-B Analysis
4. Complex Clutter Suppression via ECA-FB and ECA-FBD
4.1. ECA-FB
4.2. ECA-FBD
| Algorithm 1. The main processes of the proposed methods | |
| 1 | Input: Original surveillance signal s(t) and reference signal r(t), subbands number L, LD and Doppler extension number F. |
| 2 | Discrete Fourier transform: Apply DFT on s(t) and r(t) to obtain S(g) and R(g), respectively. |
| 3 | Subband division: Divide the signal S[g] and R[g] into L fragments with bandwidth BL. |
| 4 | Stationary clutter suppression: Go through each l in [1, L] to conduct ECA operation. |
| 5 | For l = 1, ⋯ , L do |
| 6 | Construct the one-dimensional clutter subspace via (24). |
| 7 | Estimate the clutter coefficient . |
| 8 | Subtract the stationary clutter component to obtain the clutter suppressed signal Ssur-l. |
| 9 | end |
| 10 | Subband synthesis: Recombine the subband signal to achieve Ssur. |
| 11 | Subband redivision: Redivide the signal Ssur and R into LD fragments. |
| 12 | Time-varying clutter suppression: Go through each l in [1, LD] to conduct ECA operation. |
| 14 | For l = 1, ⋯ , LD do |
| 15 | Construct the clutter subspace via (26)–(28). |
| 16 | Subtract the time-varying clutter component. |
| 17 | end |
| 18 | Output: Recombine the subband signal after removing time-varying clutter and then output it for coherent integration. |
5. Performance Analysis and Some Remarks
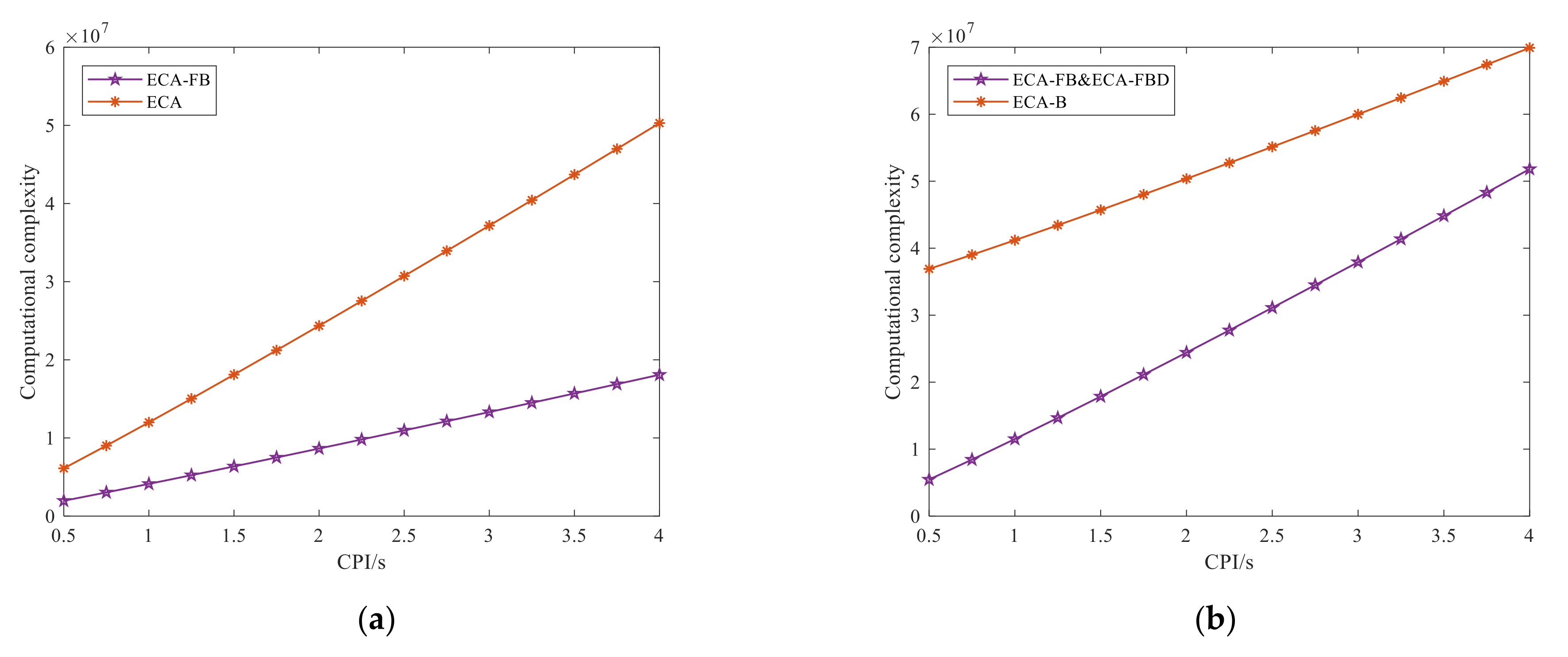
5.1. Computational Complexity
5.2. Some Remarks
6. Simulation Results
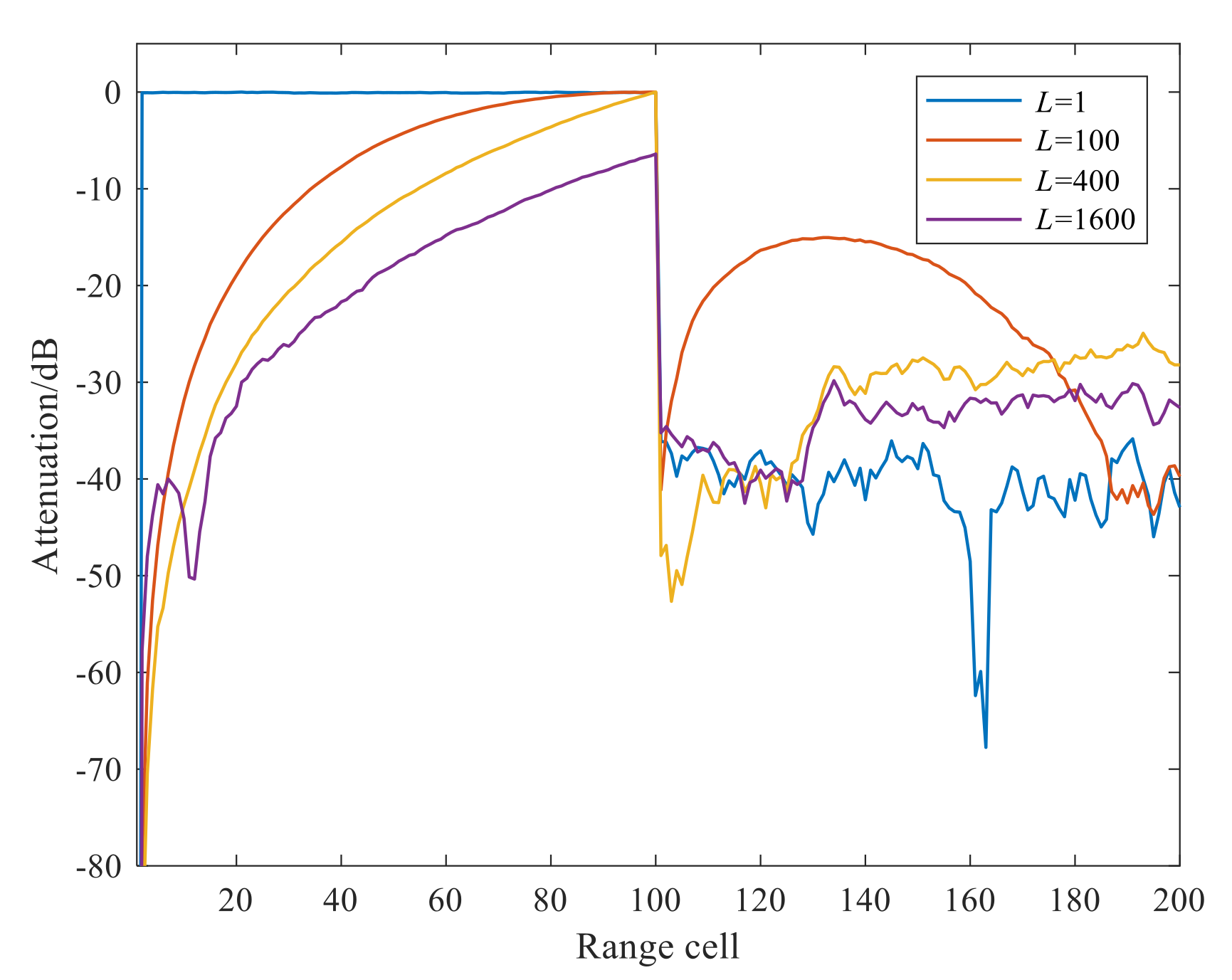
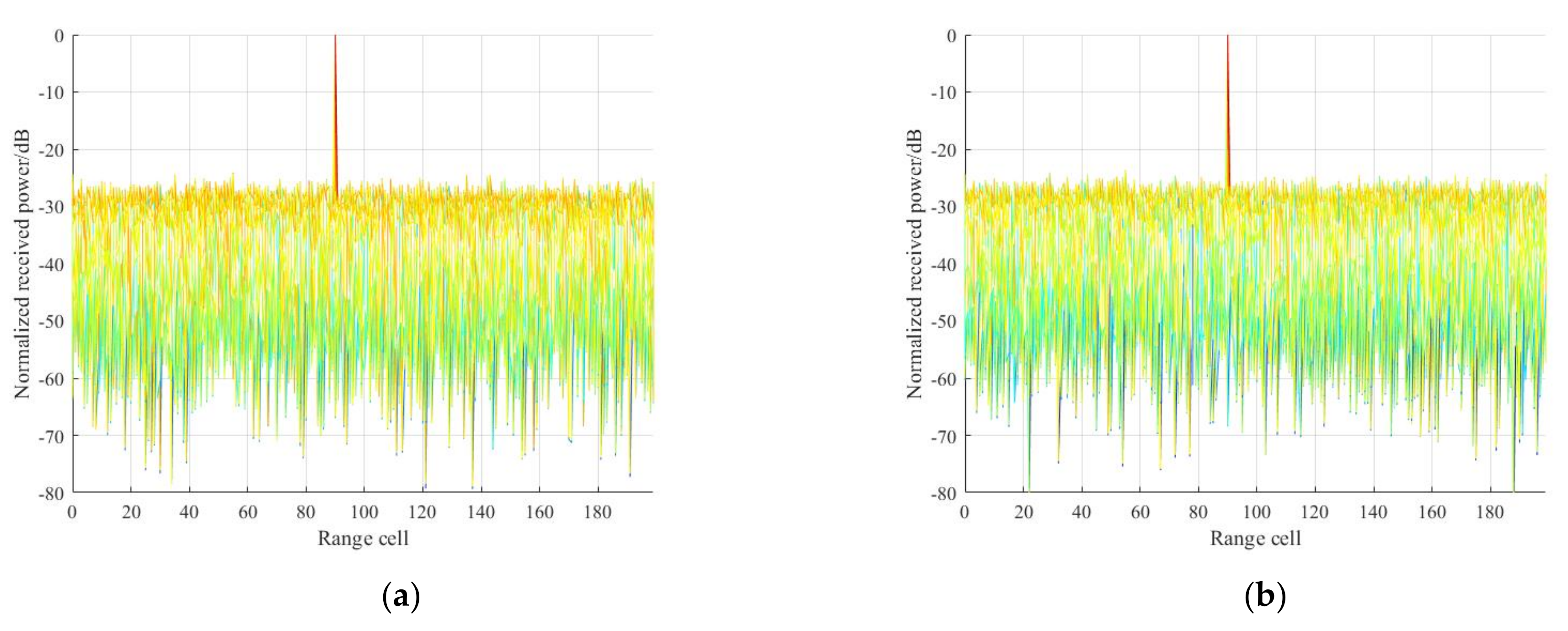
6.1. Stationary Clutter Scenario
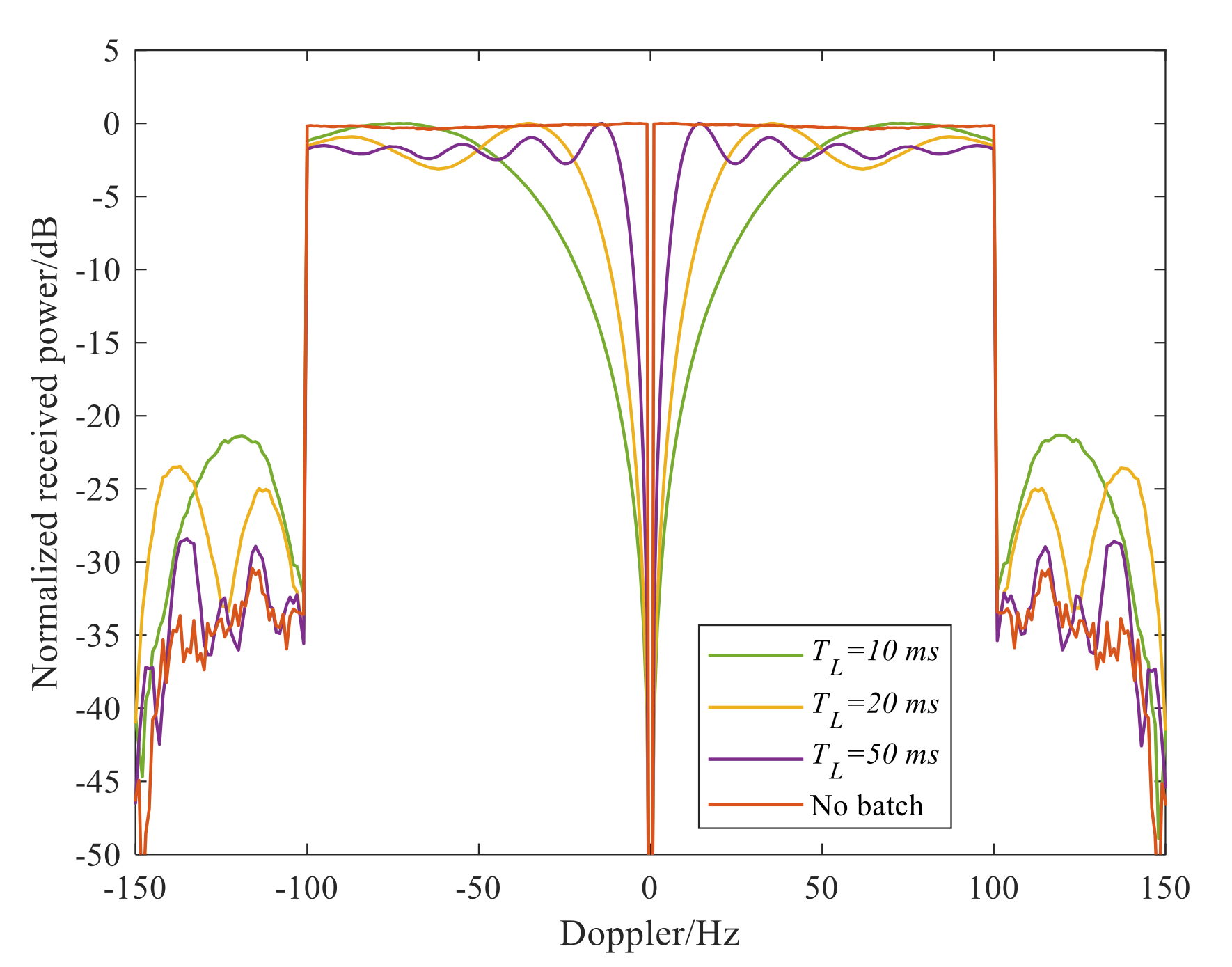
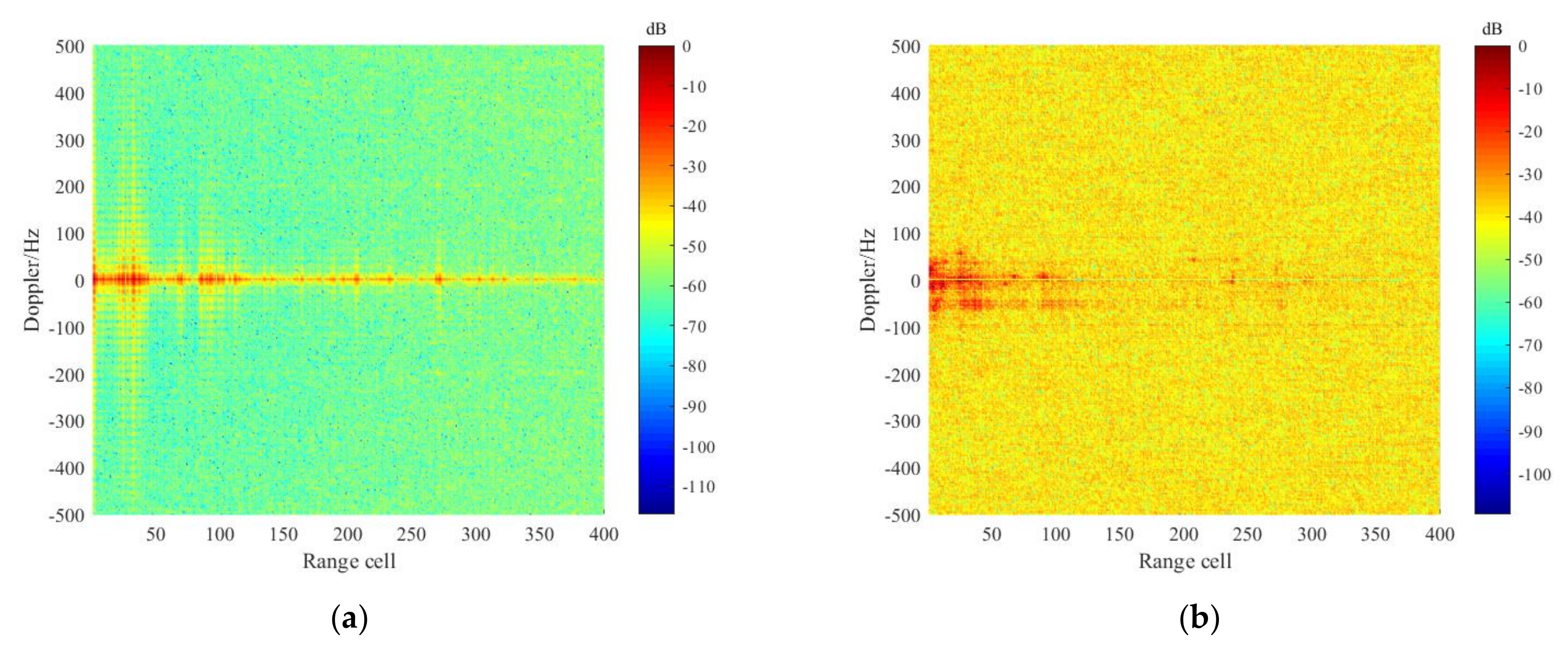
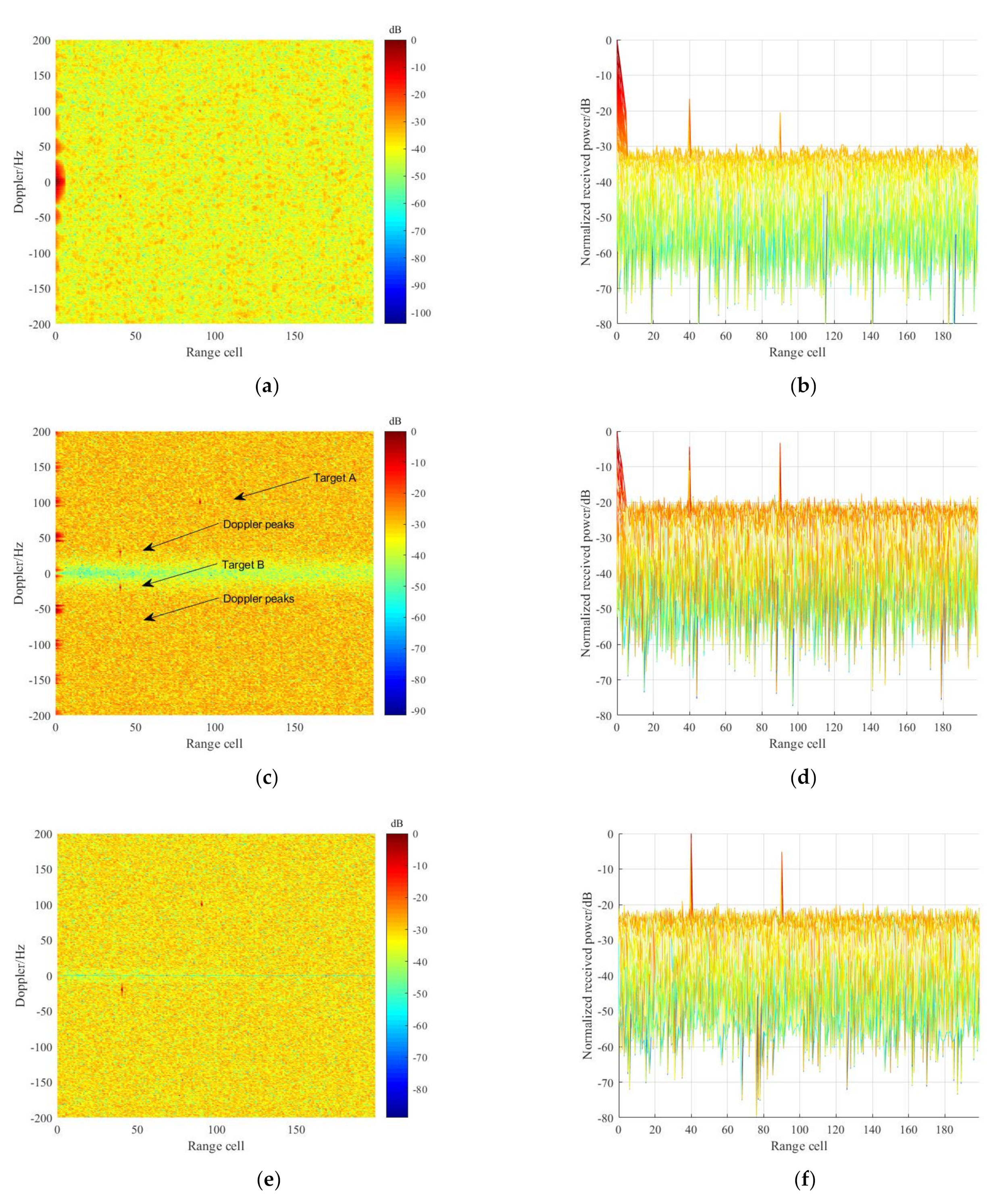
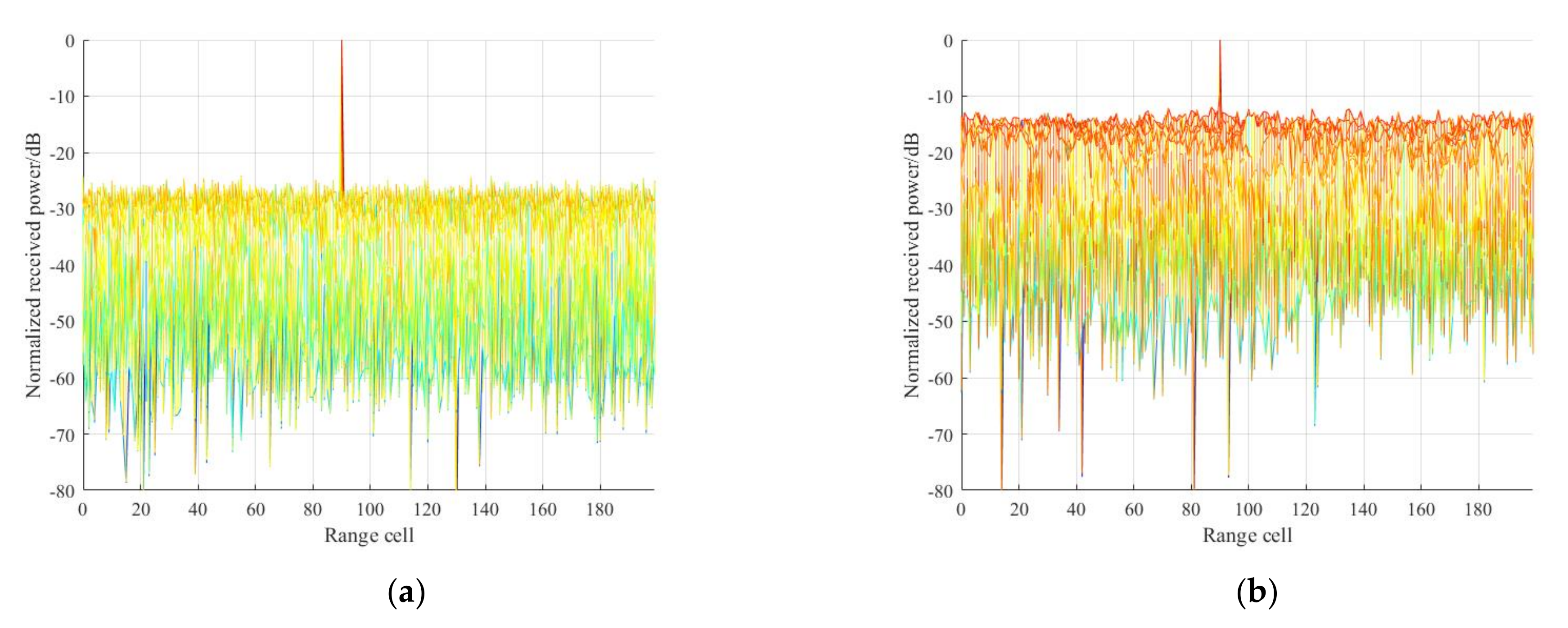
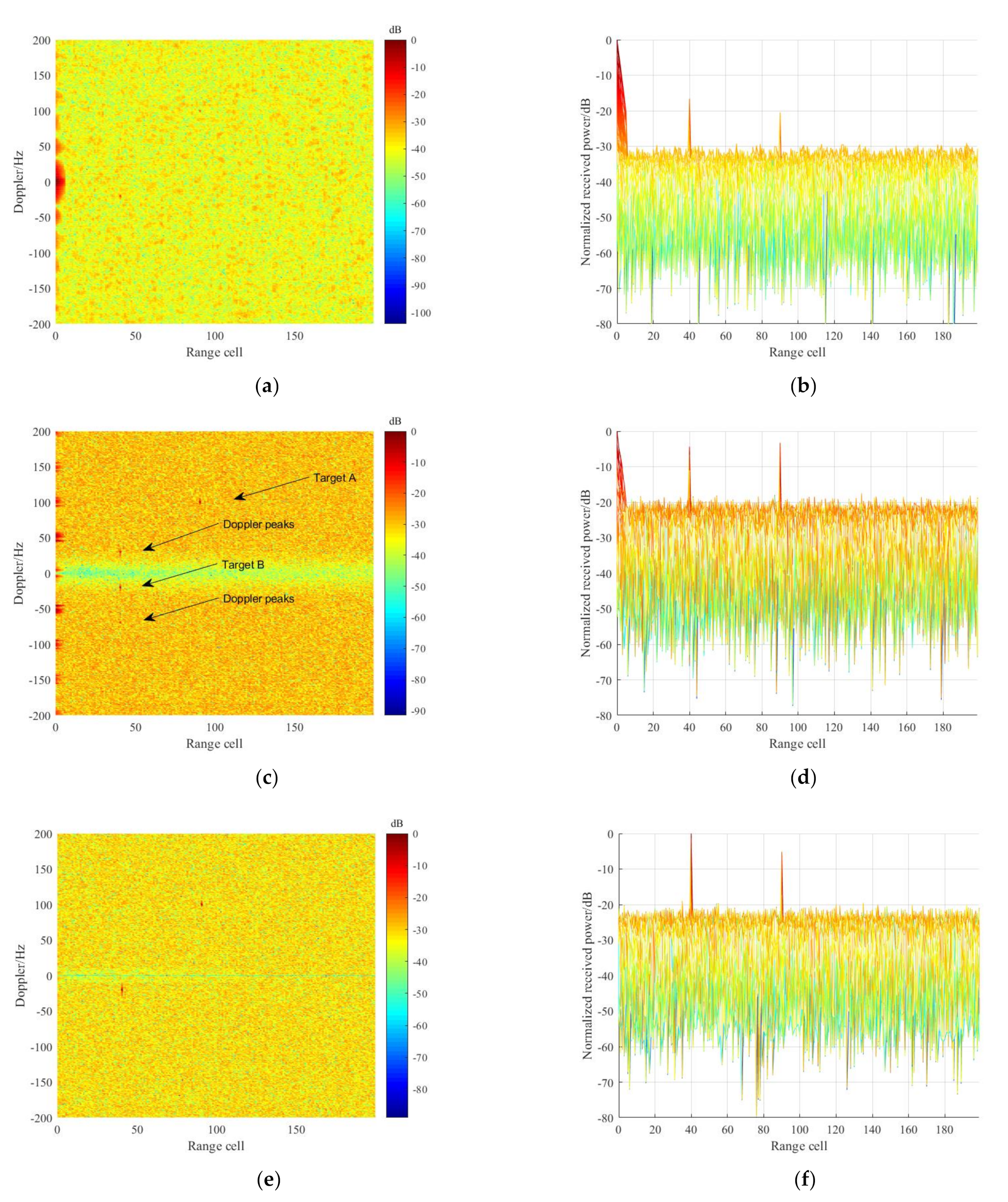
6.2. Time-Varying Clutter Scenario
7. Experimental Results
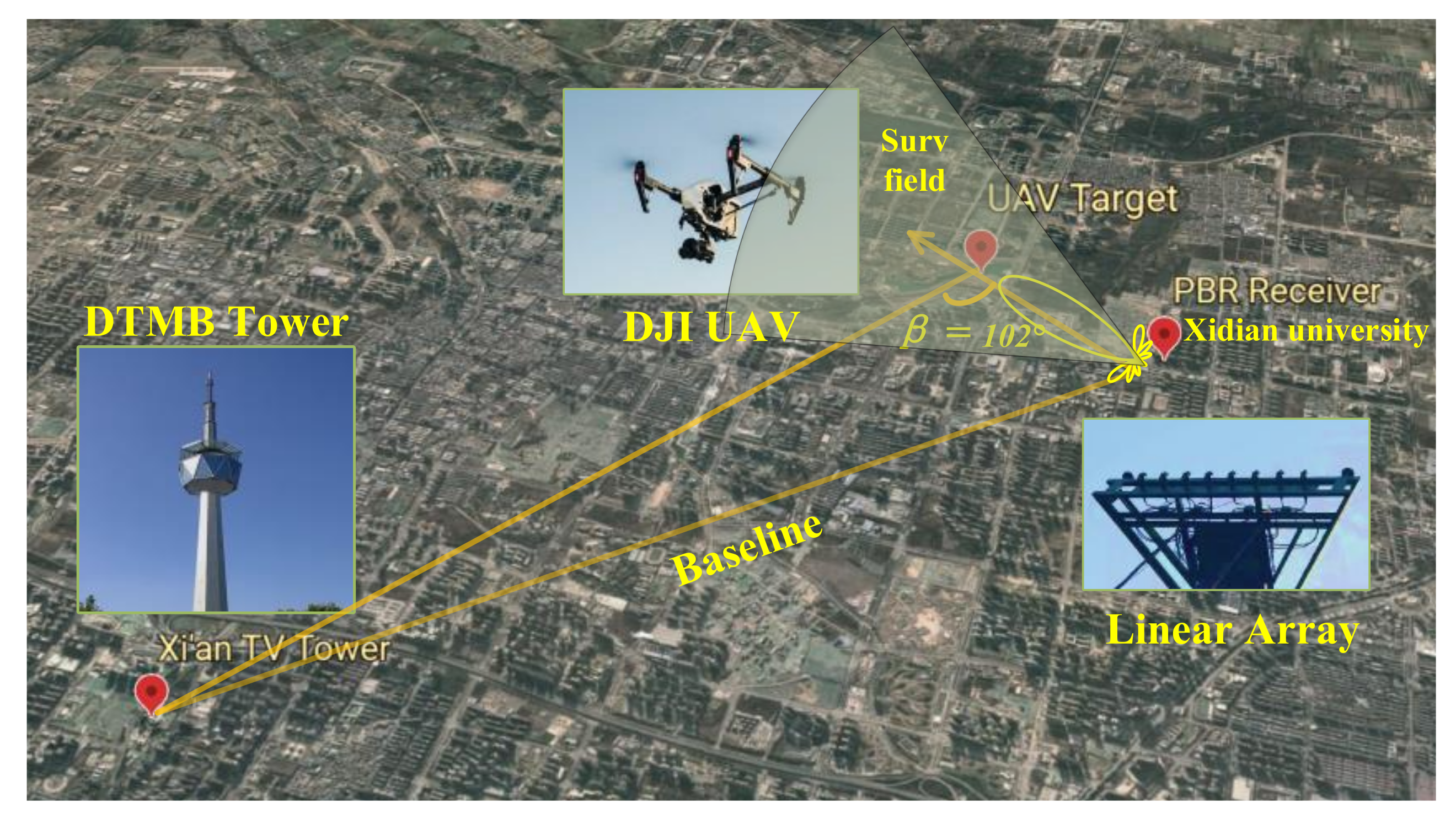
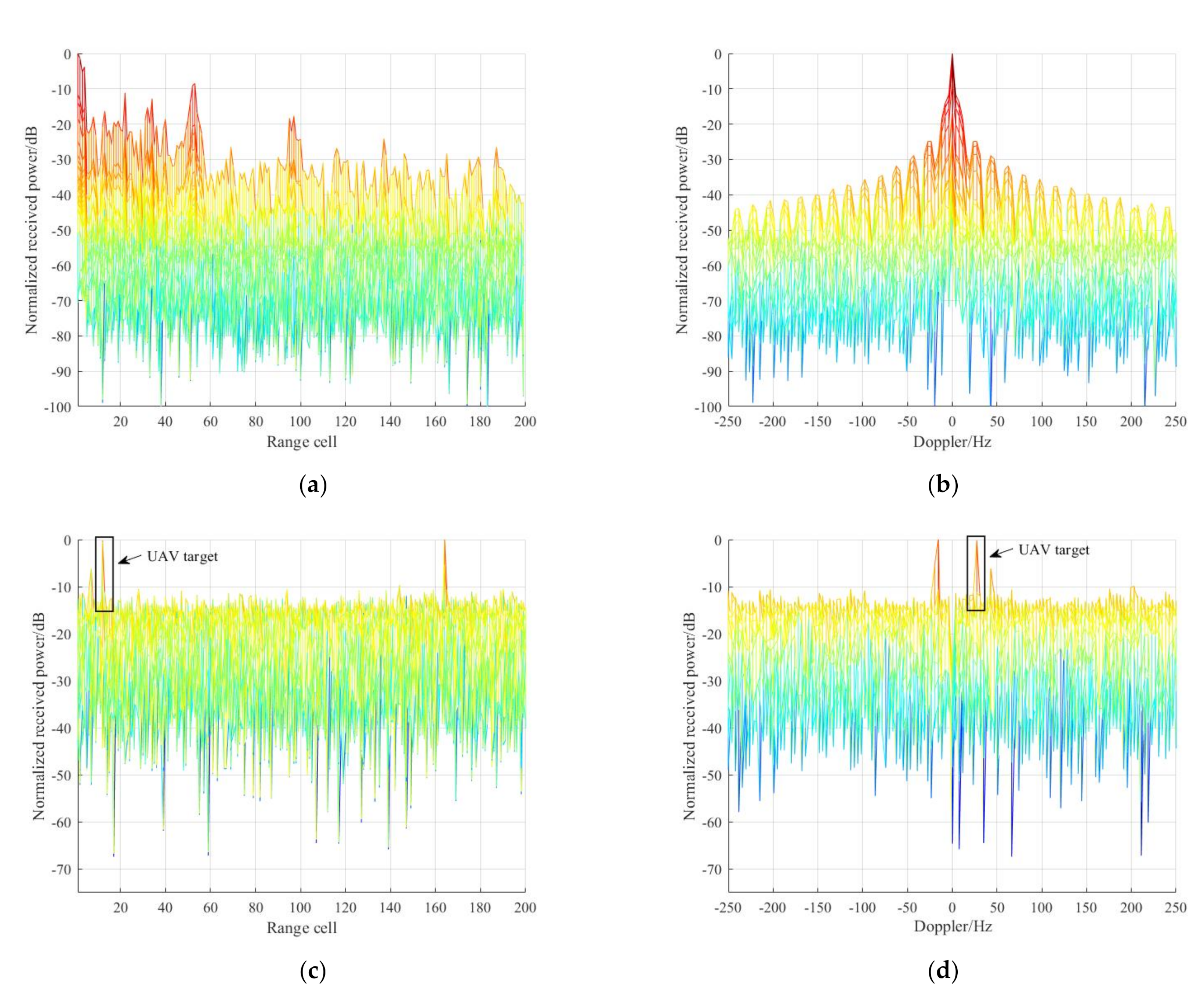
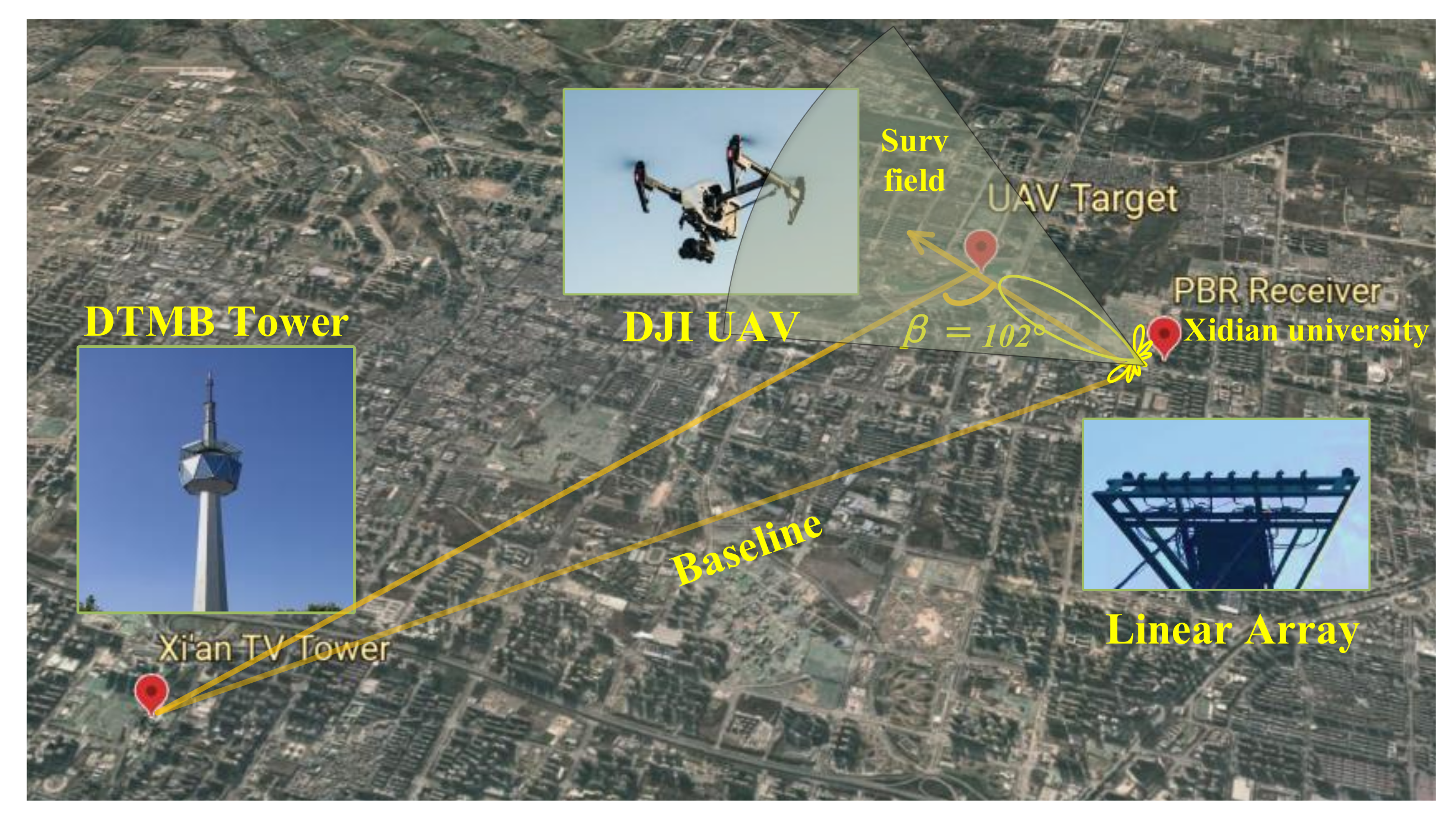
7.1. Experimental Results for the DTMB-Based PBR
7.2. Experimental Results for the FM-Based PBR
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Patel, J.S.; Fioranelli, F.; Anderson, D. Review of radar classification and RCS characterisation techniques for small UAVs ordrones. IET Radar Sonar Navig. 2018, 12, 911–919. [Google Scholar] [CrossRef]
- Miao, Y.; Li, J.; Bao, Y.; Liu, F.; Hu, C. Efficient Multipath Clutter Cancellation for UAV Monitoring Using DAB Satellite-Based PBR. Remote Sens. 2021, 13, 3429. [Google Scholar] [CrossRef]
- Griffithsm, H.; Baker, C.J. An Introduction to Passive Radar; Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Malanowski, M. Signal Processing for Passive Bistatic Radar; Artech House: Norwood, MA, USA, 2019. [Google Scholar]
- Colone, F. DVB-T-Based Passive Forward Scatter Radar: Inherent Limitations and Enabling Solutions. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1084–1104. [Google Scholar] [CrossRef]
- Palmer, J.E.; Harms, H.A.; Searle, S.J.; Davis, L. DVB-T Passive Radar Signal Processing. IEEE Trans. Signal Process. 2013, 61, 2116–2126. [Google Scholar] [CrossRef]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P. Passive Radar DPCA Schemes with Adaptive Channel Calibration. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4014–4034. [Google Scholar] [CrossRef]
- Fu, Y.; Wan, X.; Zhang, X. Side Peak Interference Mitigation in FM-Based Passive Radar Via Detection Identification. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 778–788. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K.; Kulpa, J. Analysis of detection range of FM-based passive radar. IET Radar Sonar Navig. 2014, 8, 153–159. [Google Scholar] [CrossRef]
- Daun, M.; Nickel, U.; Koch, W. Tracking in multistatic passive radar systems using DAB/DVB-T illumination. Signal Process. 2012, 92, 1365–1386. [Google Scholar] [CrossRef]
- Choi, S.; Crouse, D.; Willett, P.; Zhou, S. Multistatic target tracking for passive radar in a DAB/DVB network: Initiation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2460–2469. [Google Scholar] [CrossRef]
- Lü, M.; Yi, J.; Wan, X.; Zhan, W. Cochannel Interference in DTMB-Based Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2138–2149. [Google Scholar] [CrossRef]
- Zuo, L.; Wang, J.; Zhao, T.; Cheng, Z. A Joint Low-Rank and Sparse Method for Reference Signal Purification in DTMB-Based Passive Bistatic Radar. Sensors 2021, 21, 3607. [Google Scholar] [CrossRef] [PubMed]
- Geng, Z.; Xu, R.; Deng, H. LTE-based multistatic passive radar system for UAV detection. IET Radar Sonar Navig. 2020, 14, 1088–1097. [Google Scholar] [CrossRef]
- Abdullah, R.S.A.R.; Salah, A.A.; Aziz, N.A.; Rasid, N.A. Vehicle recognition analysis in LTE based forward scattering radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Liu, Y.; Yi, J.; Wan, X.; Zhang, X.; Ke, H. Time-Varying Clutter Suppression in CP-OFDM Based Passive Radar for Slowly Moving Targets Detection. IEEE Sens. J. 2020, 20, 9079–9090. [Google Scholar] [CrossRef]
- Schüpbach, C.; Patry, C.; Maasdorp, F.; Böniger, U. Micro-UAV detection using DAB-based passive radar. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1037–1040. [Google Scholar]
- Berger, C.R.; Demissie, B.; Heckenbach, J.; Willett, P. Signal Processing for Passive Radar Using OFDM Waveforms. IEEE J. Sel. Top. Signal Process. 2010, 4, 226–238. [Google Scholar] [CrossRef]
- Fang, L.; Wan, X.; Fang, G.; Cheng, F. Passive detection using orthogonal frequency division multiplex signals of opportunity without multipath clutter cancellation. IET Radar Sonar Navig. 2016, 10, 516–524. [Google Scholar] [CrossRef]
- Colone, F.; Cardinali, R.; Lombardo, P. Cancellation of clutter and multipath in passive radar using a sequential approach. In Proceedings of the 2006 IEEE Conference on Radar (RadarConf), Verona, NY, USA, 24–27 April 2006; pp. 1–7. [Google Scholar]
- Malanowski, M. Comparison of Adaptive Methods for Clutter Removal in PCL Radar. In Proceedings of the 2006 International Radar Symposium (RadarConf), Krakow, Poland, 24–26 May 2006; pp. 1–4. [Google Scholar]
- Dawidowicz, B.; Samczynski, P.; Malanowski, M.; Misiurewicz, J. Detection of moving targets with multichannel airborne passive radar. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 42–49. [Google Scholar] [CrossRef]
- Demissie, B. Clutter cancellation in passive radar using GSM broadcast channels. IET Radar Sonar Navig. 2014, 8, 787–796. [Google Scholar] [CrossRef]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P. A two-stage approach for direct signal and clutter cancellation in passive radar on moving platforms. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Searle, S.; Gustainis, D.; Hennessy, B.; Young, R. Cancelling strong Doppler shifted returns in OFDM based passive radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf), Oklahoma City, OK, USA, 23–27 April 2018; p. 0359-0354. [Google Scholar]
- Colone, F.; Palmarini, C.; Martelli, T.; Tilli, E. Sliding extensive cancellation algorithm for disturbance removal in passive radar. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1309–1326. [Google Scholar] [CrossRef]
- Searle, S.; Gustainis, D.; Hennessy, B.; Young, R. Aspects of Delay-Doppler Filtering in OFDM Passive Radar. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Australia, 27–31 August 2018; pp. 1–6. [Google Scholar]
- Chen, G.; Wang, J.; Zuo, L.; Zhao, D. Two-stage clutter and interference cancellation method in passive bistatic radar. IET Signal Process. 2020, 14, 342–351. [Google Scholar]
- Chabriel, G.; Barrère, J. Adaptive Target Detection Techniques for OFDM-Based Passive Radar Exploiting Spatial Diversity. IEEE Trans. Signal Process. 2017, 65, 5873–5884. [Google Scholar] [CrossRef] [Green Version]
- Tartakovsky, A.G.; Brown, J. Adaptive spatial-temporal filtering methods for clutter removal and target tracking. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1522–1537. [Google Scholar] [CrossRef]
- Colone, F.; O’Hagan, D.W.; Lombardo, P.; Baker, C.J. A Multistage Processing Algorithm for Disturbance Removal and Target Detection in Passive Bistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 698–722. [Google Scholar] [CrossRef]
- Yi, J.; Wan, X.; Li, D.; Leung, H. Robust Clutter Rejection in Passive Radar via Generalized Subband Cancellation. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1931–1946. [Google Scholar] [CrossRef]
- Zhao, Z.; Wan, X.; Shao, Q.; Gong, Z.; Cheng, F. Multipath clutter rejection for digital radio mondiale-based HF passive bistatic radar with OFDM waveform. IET Radar Sonar Navig. 2012, 6, 867–872. [Google Scholar] [CrossRef]
- Schwark, C.; Cristallini, D. Advanced multipath clutter cancellation in OFDM-based passive radar systems. In Proceedings of the 2016 IEEE Radar Conference, Seattle, WA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar]
- Liu, S.; Cao, Y.; Yeo, T.S.; Wu, W. Adaptive Clutter Suppression in Randomized Stepped-Frequency Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1317–1333. [Google Scholar] [CrossRef]
- Garry, J.L.; Baker, C.J.; Smith, G.E. Evaluation of Direct Signal Suppression for Passive Radar. IEEE Trans. Geosci. Remote. Sensing 2017, 55, 3786–3799. [Google Scholar] [CrossRef]
- Filip-Dhaubhadel, A.; Shutin, D. Long Coherent Integration in Passive Radar Systems Using Super-Resolution Sparse Bayesian Learning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 554–572. [Google Scholar] [CrossRef]
- Garry, J.L.; Smith, G.E. Experimental Observations of Micro-Doppler Signatures With Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1045–1052. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
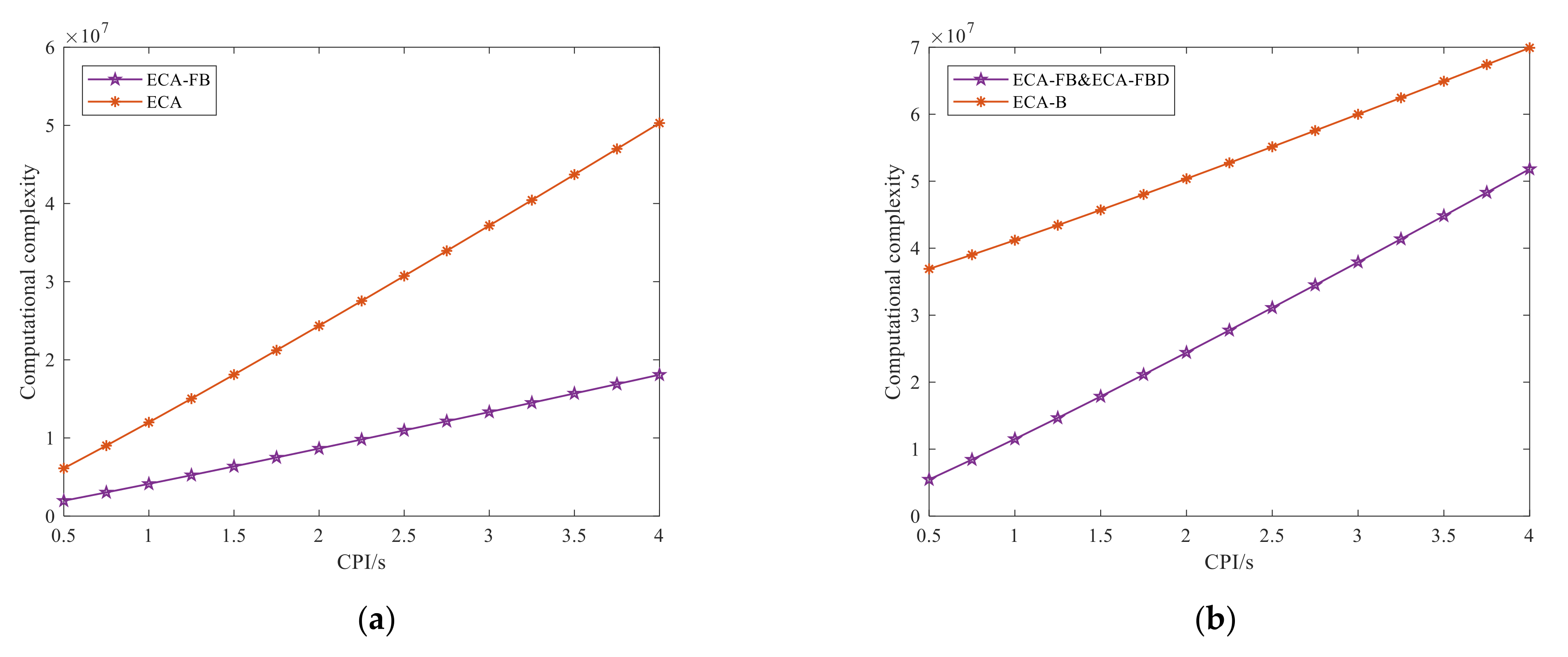
| Methods | Number of Mcs |
|---|---|
| ECA-FB | Nlog2(N) + (3NL + 1)L |
| ECA-FBD | LD[3ND(1 + log2(ND)) + F2((1 + log2(F)))] |
| ECA | 3N(1 + log2(N)) + K2(1 + log2(K)) |
| ECA-B | LB[3NB(1 + log2(NB)) + K2((1 + log2(K)))] |
| Description | Parameter | Value |
|---|---|---|
| total subcarriers | - | 3780 |
| carrier frequency | fc | 666 MHz |
| sample frequency | fs | 8 MHz |
| carrier spacing | ∆f | 2 kHz |
| bandwidth | B | 7.56 MHz |
| frame header mode | - | 1 |
| CPI | T | 0.5 s |
| Motion Parameters | Target A | Target B | Stationary Clutter | Time-Varying Clutter | |
|---|---|---|---|---|---|
| Integer Order | Fractional Order | ||||
| range bins | 90 | 40 | 0:1:50 | 0.5:1:10.5 | 0:1:10 |
| Doppler (Hz) | 100 | −20 | 0 | 0 | −10:2:10 |
| CNR/SNR (dB) | −39 | −34 | 40:−1:−10 | 25:−2:5 | 10:−1:0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, L.; Wang, J.; Sui, J.; Li, N. An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar. Remote Sens. 2021, 13, 4954. https://doi.org/10.3390/rs13234954
Zuo L, Wang J, Sui J, Li N. An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar. Remote Sensing. 2021; 13(23):4954. https://doi.org/10.3390/rs13234954
Chicago/Turabian StyleZuo, Luo, Jun Wang, Jinxin Sui, and Nan Li. 2021. "An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar" Remote Sensing 13, no. 23: 4954. https://doi.org/10.3390/rs13234954
APA StyleZuo, L., Wang, J., Sui, J., & Li, N. (2021). An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar. Remote Sensing, 13(23), 4954. https://doi.org/10.3390/rs13234954