1. Introduction
Water vapor in the atmosphere plays an important role in weather and climatic processes [
1,
2]. Tropospheric water vapor has highly fluctuating characteristics in both time and space, leading to a relatively poor understanding of it compared with other atmospheric variables, such as wind and temperature fields. In short timescale cases ranging from minutes to hours, previous studies have reported an increase in the amount of water vapor just before severe precipitation [
3,
4,
5]. Therefore, monitoring the amount and the spatial distribution of atmospheric water vapor in detail is crucial to improving precipitation prediction and understanding the terrestrial water cycle [
6,
7].
Interferometric synthetic aperture radar (
InSAR) has been used to measure precipitable water vapor (
PWV) maps with high spatial resolution (a few tens of meters) (e.g., [
8,
9,
10,
11,
12]). When microwaves emitted from a satellite travel through the neutral atmosphere, the phase velocity of the microwave is changed, and the travel path is bended due to having a different refractive index to the vacuum. This effect is called the neutral atmospheric propagation delay effect. In particular, in the case of
InSAR, water vapor plays a dominant role in the neutral atmospheric propagation delay effect due to its high variability in both time and space. The dry atmospheric
InSAR delay is large, but the heterogeneity of it over the scene depends on the scene size. In the case of the standard strip map observation mode, the effect of the dry atmosphere is smaller than that of the wet atmosphere [
13].
The satellite
InSAR technique was originally used to measure the surface displacement occurring between two SAR acquisition times by using the microwave phase difference. In view of the surface deformation observation, atmospheric water vapor is one of the most problematic error sources in
InSAR observations. Therefore, even if there is no surface displacement between two observations,
InSAR phase information mainly reflects the effect of atmospheric water vapor. In sum, if the atmospheric delay signal and other contributions, such as the surface displacement and the ionospheric noise, can be adequately separated from the
InSAR data, it is possible to obtain the water vapor distribution at a high spatial resolution in orders of tens to hundreds of meters, regardless of the weather conditions [
14].
The distribution of water vapor in the atmosphere is not uniform but is greatly affected by weather conditions. There are two types of water vapor observation techniques currently used for operational weather predictions: one is ground-based observations, such as the radiosonde and the global navigation satellite system (
GNSS), and the other is satellite observations using
GNSS radio occultation techniques [
15] and infrared/passive microwave sensors. However, ground-based observations such as the
GNSS have the limitation that the spatial resolution depends on the station’s density, resulting in, for example, tens of kilometers in the best operational case scenario of
GNSS [
16]. Water vapor is observed at a low spatial density as the geometric distance between neighboring observation points is usually at least several tens of kilometers or more. On the other hand, the satellite infrared observation cannot be used for water vapor in cloudy conditions.
It is expected that the accuracy of precipitation prediction can be improved by incorporating
InSAR data into weather forecast models in addition to traditional observation data, as
InSAR has the advantage of its unprecedented high spatial resolution, even under cloudy conditions, which may complement the weakness of traditional water vapor observation techniques [
17]. In a previous study that assimilated
InSAR-derived water vapor information into a meso-scale weather model, precipitation prediction improved by up to 9 h [
7]. In addition, a continuous use of
InSAR water vapor information for short-term weather forecasting at the Iberian Peninsula using Sentinel-1 indicated a positive impact for improving precipitation prediction [
18]; however,
InSAR water vapor information has not yet been put into practical use for operational weather forecasting, and thus it is necessary to further investigate the potential of
InSAR water vapor observation for the improvement of precipitation prediction.
The statistical evaluation of the accuracy and precision of
InSAR water vapor observation is indispensable, especially for each type of microwave frequency band used in SAR systems. This is due to the fact that noise characteristics largely differ depending on the microwave center frequency; however, in previous studies, only the observation accuracy of C-band SAR was evaluated. (e.g., [
19,
20]). Currently, three frequency bands are used for SAR satellites: X-band (e.g., 9.65 GHz), C-band (e.g., 5.40 GHz), and L-band (e.g., 1.25 GHz). L-band SAR observations are typically less sensitive to the surface cover change due to, for example, the vegetation change rather than a higher frequency SAR, such as C-band SAR. Therefore, L-band SAR has the advantage that the phase information of the received data in two observations can easily interfere with each other, even in the case of mountainous and richly vegetated areas such as Japan.
When microwaves pass through the ionosphere in the upper atmosphere, the phase velocity of the microwaves changes and appears in the InSAR data as an apparent change in line-of-sight distance. The phase variation due to the ionosphere (hereafter referred to as ionospheric delay) is caused by free electrons in the ionosphere, which has a dispersive nature within the microwave frequency range. Therefore, the lower the center frequency is, the larger the change in the wave phase velocity becomes. In particular, the ionospheric delay effect is significant in L-band SAR compared to other SAR systems. In order to utilize L-band InSAR data for meteorology, it is necessary to separate the ionospheric delay from the neutral atmospheric delay.
We need to clarify the error level of the water vapor observation in L-band SAR systems, which has not been evaluated in previous studies. In this study, we statistically evaluated the L-band
InSAR observation error of water vapor, with the aim of improving the precipitation forecast accuracy by using
InSAR water vapor information, especially under extreme weather situations. This paper is organized as follows. In
Section 2, we introduce atmospheric delay physics. In
Section 3, we describe methods to estimate the
InSAR PWV error level. In
Section 4, we present outlines of the SAR and
GNSS data used in this study. In
Section 5, results of the error estimation are shown.
Section 6 and
Section 7 are the discussion and the conclusion.
2. Atmospheric Delay Physics
The basic
InSAR observable is the phase difference of microwaves obtained from two SAR acquisitions. The observed phase difference
contains several contributions, which can be expressed as follows:
where
represents the phase change due to the surface displacement that occurred during the two observations,
is the phase variation due to possible orbital errors, and
is the residual topographic phase due to errors in the digital elevation model (DEM) data.
and
are the atmospheric propagation delays in the ionosphere and the neutral atmosphere, respectively.
represents all other sources of noise.
From the previous study [
21], the propagation distance
of microwaves can be expressed as follows:
where
is the refractive index and
is the path increment at an arbitrary location in the atmosphere.
The atmospheric delay
is given as follows:
where
is the actual propagation path length, and
is the geometric distance between the satellite and the Earth’s surface. In sum, the bending effect expressed in the second term of the right-hand side is negligibly small in the range of the SAR incidence angle from 20° to 50°. Therefore, we can ignore the term
.
The ionospheric delay is due to the existence of electrons, and the ionospheric range delay (
) at frequency (
f) can be written as follows:
where
α is a constant value used to convert the total election content unit (TECU) to the unit of length, and
represents the slant total election content [
22].
The refractive index of the neutral atmosphere is a function of temperature
(Kelvin), partial pressure of dry air
(hPa), and partial pressure of water vapor
(hPa), which is expressed as follows [
23]:
where
and
are the compressibility factors of dry air and water vapor, respectively, which can be assumed as equal to the unit value in the ordinary air condition.
(K/hPa),
(K/hPa) and
(K
2/hPa) are the coefficients determined by laboratory experiments. These specific values were given by [
24].
In particular, the neutral atmospheric delay integrated from the surface to the top of the atmosphere in the zenith direction is called the “zenith total delay” (
ZTD) and can be written as follows:
where
is the total density of the atmosphere,
is the molecular weight of dry air (28.9644 kg/kmol),
is the height and
is the universal gas constant (8314.34 J/kmol∙K). In the equation, we introduced a new coefficient,
, where
is the molecular weight of water vapor (18.0152 kg/kmol). The first term on the right-hand side of Equation (6) is the effect of the molecular weight of air in the atmosphere, and the second and third terms on the right-hand side are the delay due to water vapor alone in the atmosphere. The first term is denoted as the “zenith hydrostatic delay” (
ZHD), and the latter as the “zenith wet delay” (
ZWD).
The
ZHD can be modeled accurately using the surface pressure
, the latitude at the point
and the ellipsoidal height
as follows [
25]:
and
The uncertainly given for the
ZHD (
) is approximately 2.41 mm [
25].
The
ZWD is the residual of the
ZTD subtracted by the
ZHD (
ZWD =
ZTD −
ZHD). Therefore, the
ZWD can be expressed as follows [
26]:
PWV is the total amount of water vapor contained in the atmospheric column over a unit area. The relationship between
ZWD and
PWV is given as follows:
here
and
where
is the gas constant of water vapor,
is the density of water vapor, and
is the average air temperature weighted by the partial pressure of water vapor above the surface (weighted average air temperature) [
26]. Fortunately,
can be approximated by the ground temperature
as follows [
21]:
In sum, can be approximately regarded as a function of the ground temperature.
3. Error Evaluation Method
InSAR originally observes the phase change
, which reflects the differences in microwave propagation path lengths.
is the linear sum of phase changes due to several factors, as shown in Equation (1). Regarding the neutral atmospheric delay,
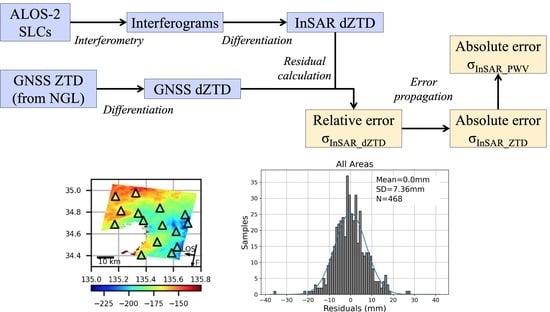
InSAR observes the relative difference in atmospheric delays between two acquisition times. In this study, we estimated the “
InSAR zenith total delay difference” (
), whose offset was calibrated using the “
GNSS zenith total delay difference” (
) according to the formulae provided in previous studies [
19,
20]. Hereinafter, “
InSAR initial value” (
) denotes the phase delay in the zenith direction converted from the satellite line-of-sight direction using the incidence angle
and a simple trigonometric function.
was derived through the following equation as follows:
where
is the colocation point number of the
GNSS and
InSAR observation point in the target area. Here, it should be noted that
InSAR observations reflect the delay along the line-of-sight (narrow tube), but
GNSS ZTDs reflect the average of the delay within the inverse cone space above
GNSS stations. This indicates that
GNSS-derived atmospheric values are representative values within the inverse cone, whose radius at the tropopause (approximately 12 km around Japan) was approximately 100 km, with the cut-off angle of 7 degrees, in our case. On the other hand, the
InSAR phase is only affected by the atmosphere along the microwave path, indicating that the
InSAR PWV signal reflects the atmospheric heterogeneity within a narrow tube (radius ranging from a few to a hundred meters depending on multilooking and filtering processes) between the ground and the satellite. In this context, we should keep in mind that the spatial representativeness of
InSAR PWV observation is intrinsically different from that of
GNSS. Therefore, to compensate for this representativeness gap between
InSAR and
GNSS, even if only slightly, we applied significantly large multilooking and strong spatial filtering to all interferograms, resulting in values of the actual spatial resolution of several hundred meters or larger. Details of the
InSAR processing are described in
Section 4.1.
The
must be calibrated to be converted into
. The amount of an offset in a specific scene (
) is determined by the non-weighted average of estimated differences between the
and
at each station
within the scene:
where
and
represent the
ZTD observed by
GNSS at times closest to the reference SAR observation and the secondary one, respectively. Using the estimated offset, we could obtain
at an arbitrary pixel
(
) by adding it to
:
The standard deviation of residuals between
and
represents the relative error of
from
. As previous studies that evaluated measurement errors of other kinds of water vapor measurement techniques estimated these absolute errors by assuming the radiosonde observation technique as the most accurate, our study finally estimated the absolute error of the L-band
InSAR PWV measurement by considering the radiosonde-derived
PWV values as the true value. In sum, we considered the relative error of the
InSAR PWV measurement against the radiosonde
PWV measurement as the absolute error of the
InSAR PWV observation. To estimate the standard deviation of residuals between
and
, we defined the residual (
) at a location
between
and
as follows:
Then, its standard deviation (
) was calculated as follows:
where
represents the mean of
in a specific interferogram.
Then, we could reasonably assume that errors of
and
had no correlation and could be set as equal (
) since the time interval of these two observations was larger than 14 days, which is the recurrence interval of the ALOS-2 satellite. Under this assumption, we could express the error of
using the law of error propagation as follows:
In our study, we adopted
as 17.0 mm, as obtained in a previous study [
27].
The absolute
dZTD error of
InSAR, which is the relative error against the radiosonde
dZTD, is equal to the root of the square sum of (1) the relative error of the
GNSS dZTD (
), (2) the processing error of the
GNSS ZTD (
), and (3) the relative error of
from
(
). Using Equation (20),
can be expressed as follows:
Here,
is fixed as 3.0 mm, which is the rough average from the processed
GNSS ZTD data [
28].
As Equation (21) represents the error of difference of two
InSAR ZTD observations, its decomposition into the error of
InSAR ZTD measurements at a single observation is required. Assuming that there is no correlation between atmospheric delays in each SAR acquisition time, the error of
InSAR ZTD (
) can be introduced using the law of error propagation from
in Equation (21). From the assumption, standard deviations (errors) of
InSAR ZTDs at reference and secondary observations can be regarded as equal. As the
is derived from two independent
InSAR ZTDs (
),
can be decomposed as the root of the square sum of two standard deviations of
. This can be expressed as follows:
To estimate the
PWV error, we further needed to decompose
into errors of dry and wet components. From the relationship between
ZWD and ZTD, the error of
InSAR ZWD (
) can be expressed as follows:
where
is the estimation error of
ZHD in Equation (7), and as introduced in
Section 2, we set this value as 2.41 mm from the previous study [
25]. Using Equation (23), we could remove the contribution of the dry air and obtain the error of
InSAR ZWD measurements, which was used to obtain the error of the
InSAR PWV measurements.
The relationship between
ZWD and
PWV is provided by Equations (10) to (13). According to [
24], the
PWV conversion factor Π can be estimated with good accuracy using the surface temperature. As the sensitivity of Π to
is small, in this study, we used a fixed value of surface temperature,
, which was estimated from the average temperature from June to September (hereafter referred to as the wet season) in 2020 in the Kyushu region, where heavy rainfall events are especially likely to occur in this season. The reason that we chose this period is that a large amount of SAR data we used were obtained in Kyushu during the wet season. Specifically, we used
, and thus the absolute error of the
InSAR PWV (
), which we aimed to estimate, is expressed as follows:
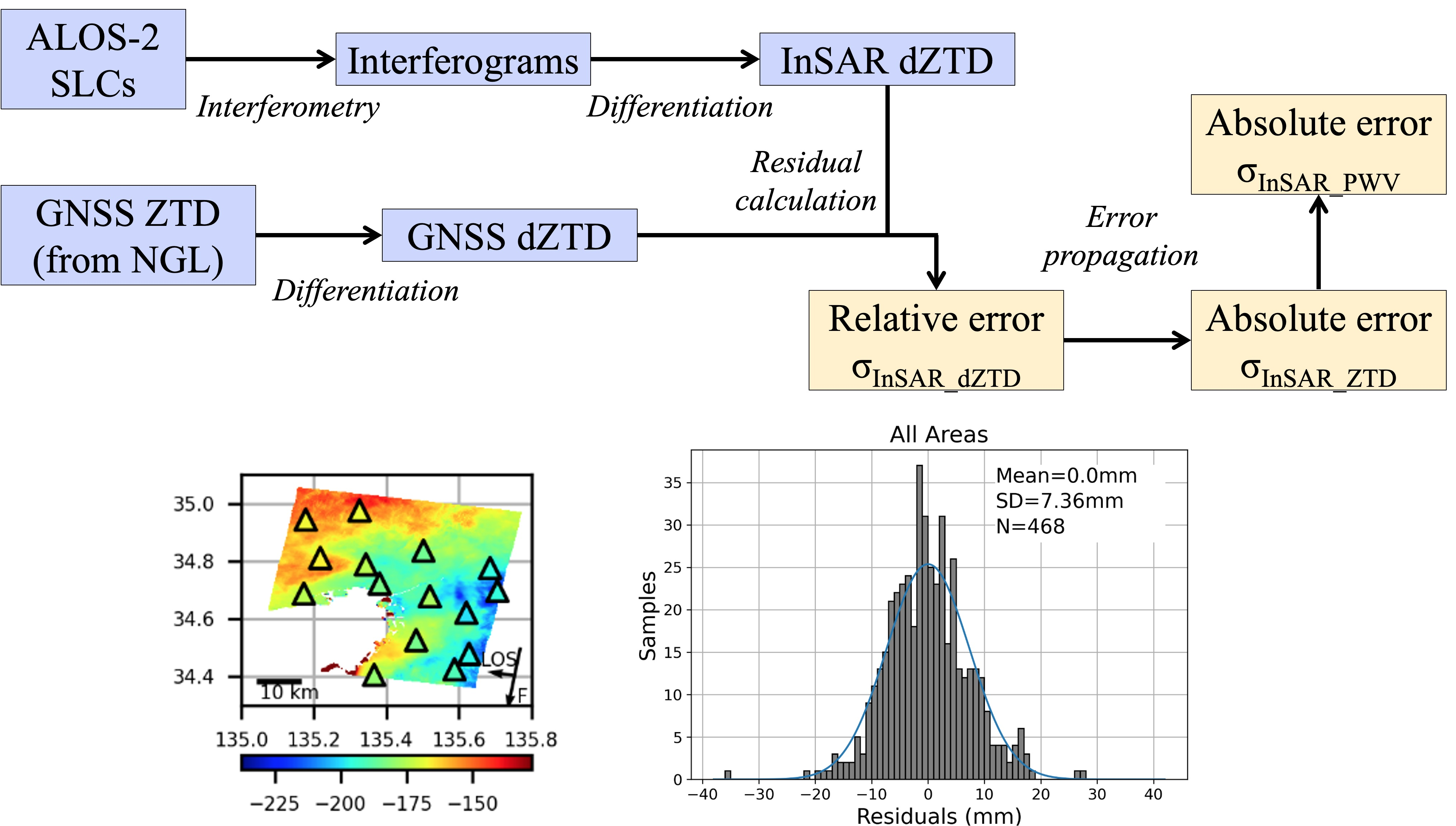
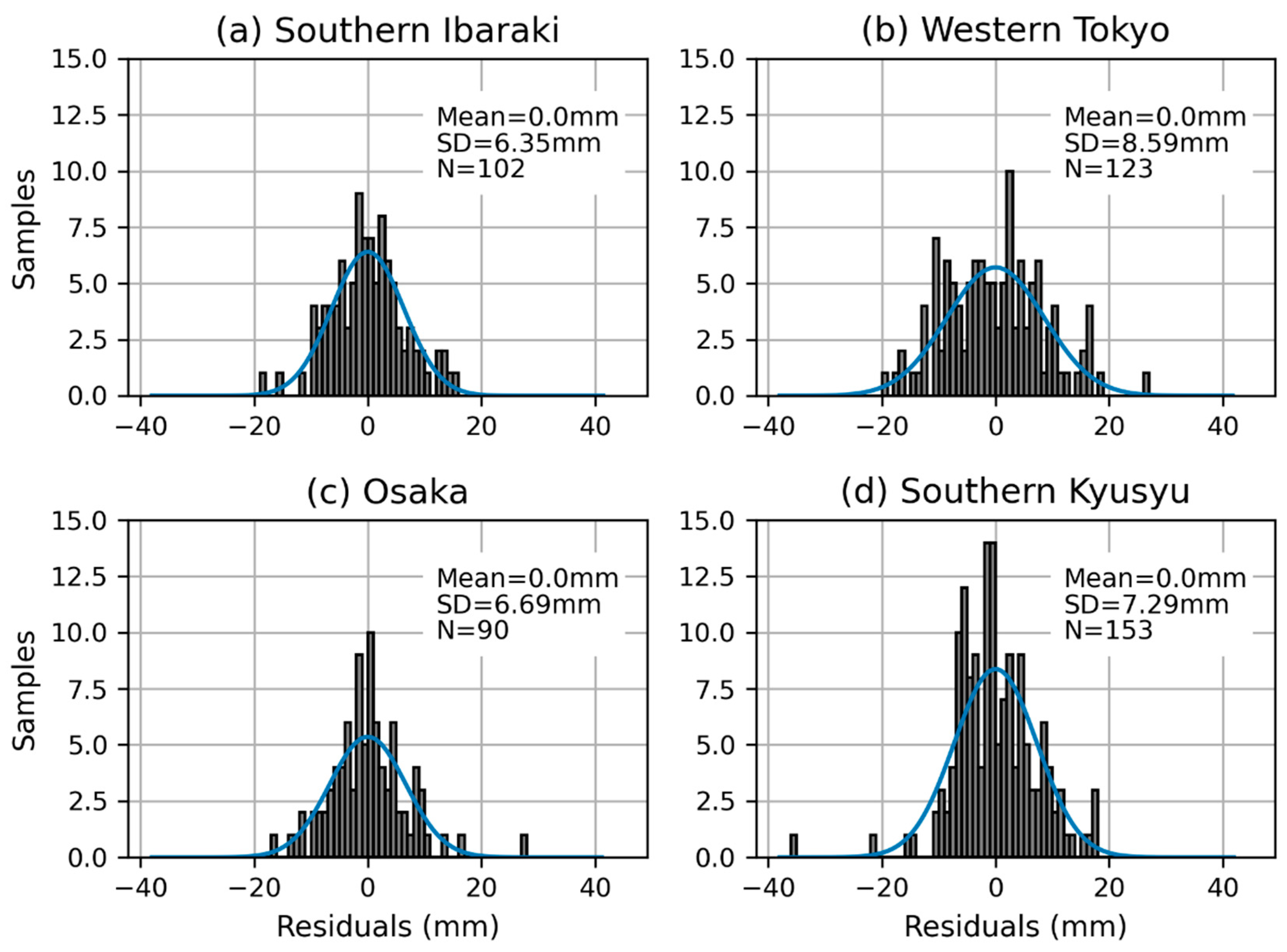
5. Result
Figure 3 shows the distribution of residuals between
and
(
) in each area. The average values of residuals
were 0.00 mm in each area. Standard deviations of
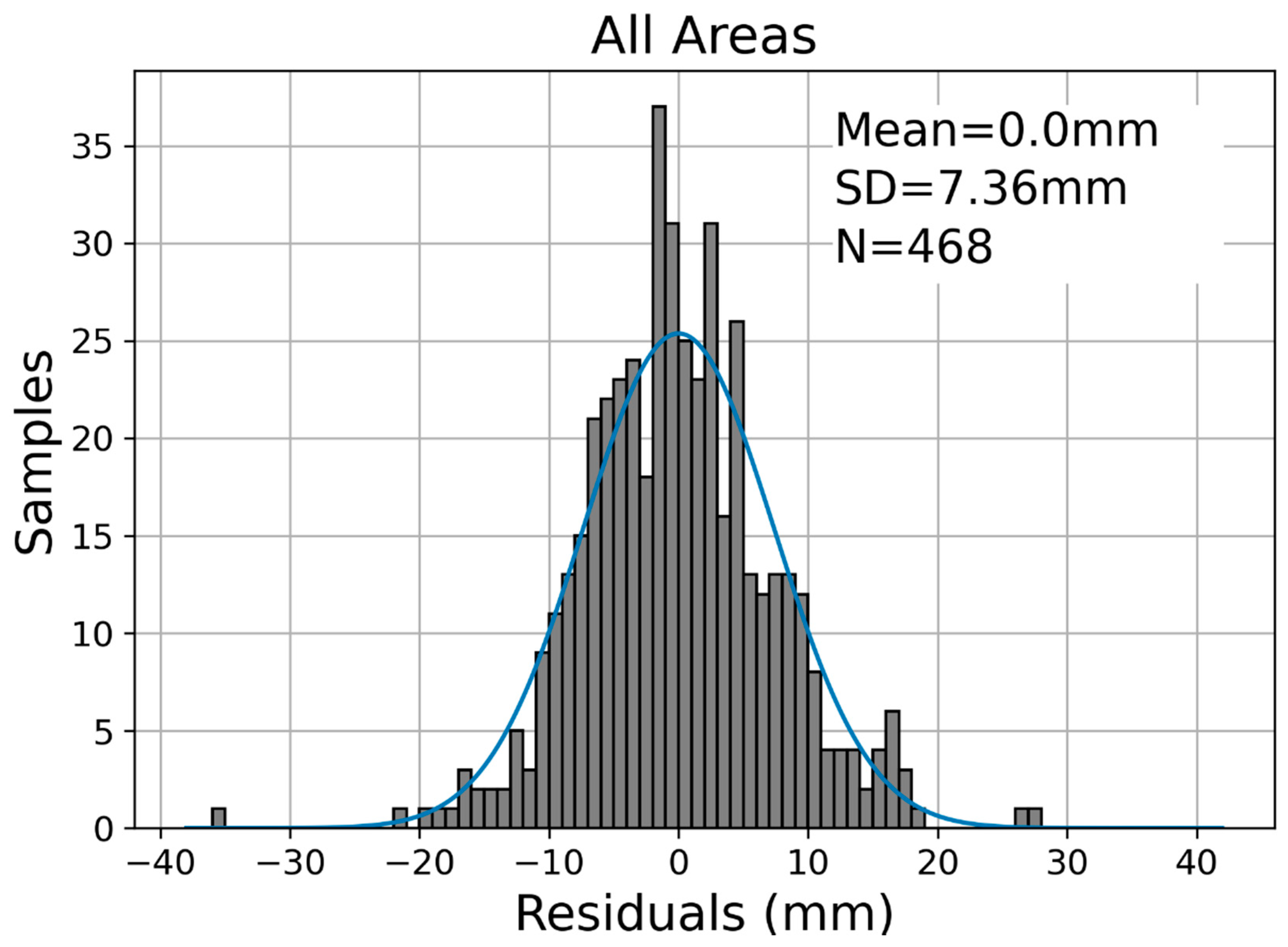
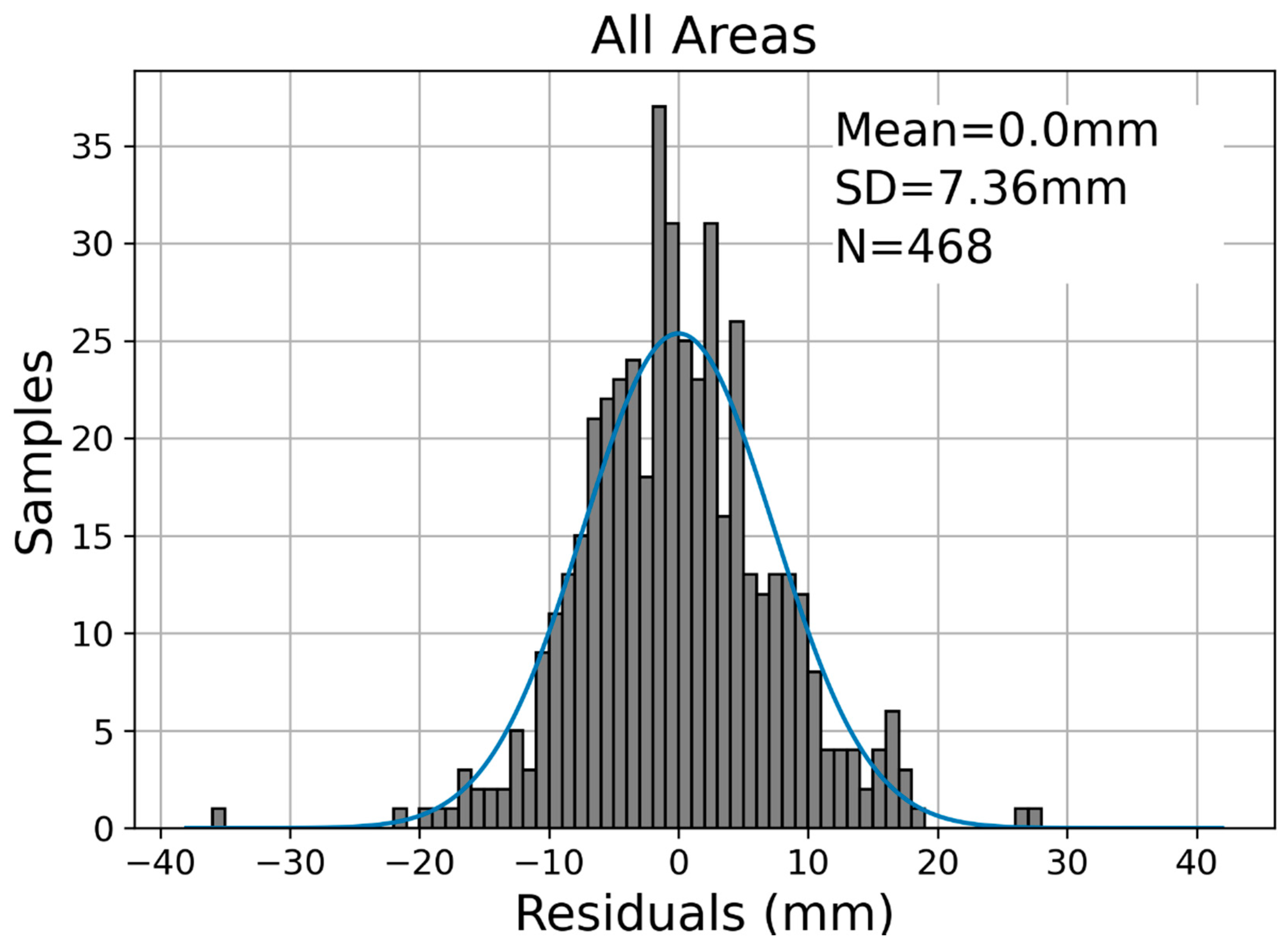
were 6.35 mm in southern Ibaraki, 8.59 mm in western Tokyo, 6.69 mm in Osaka and 7.29 mm in southern Kyusyu, respectively. We also plotted the distribution of the residuals between
and
, combining all four areas in
Figure 4. For the residuals of all four areas, the mean and standard deviation (
) became 0.00 and 7.36 mm, respectively. Based on the estimated standard deviation of the residuals including all areas, we evaluated the errors in Equations (21) (
), (22) (
), (23) (
) and (26) (
) step by step using the error propagation theory. First, we calculated the absolute error of
InSAR dZTD (
) using Equation (21), resulting in 25.50 mm based on
GNSS processing and the
ZTD error values introduced in
Section 3. In the next step, we calculated
in Equation (22), which was estimated as 18.03 mm. After calculating
using the
ZHD error (
) through Equation (23), we could finally obtain the absolute error of
InSAR PWV (
) as 2.96 mm through Equation (24). The estimated
was slightly larger than the
PWV errors of other observation techniques evaluated in previous studies [
12,
20,
39,
40,
41] (
Figure 5 and
Figure 6).
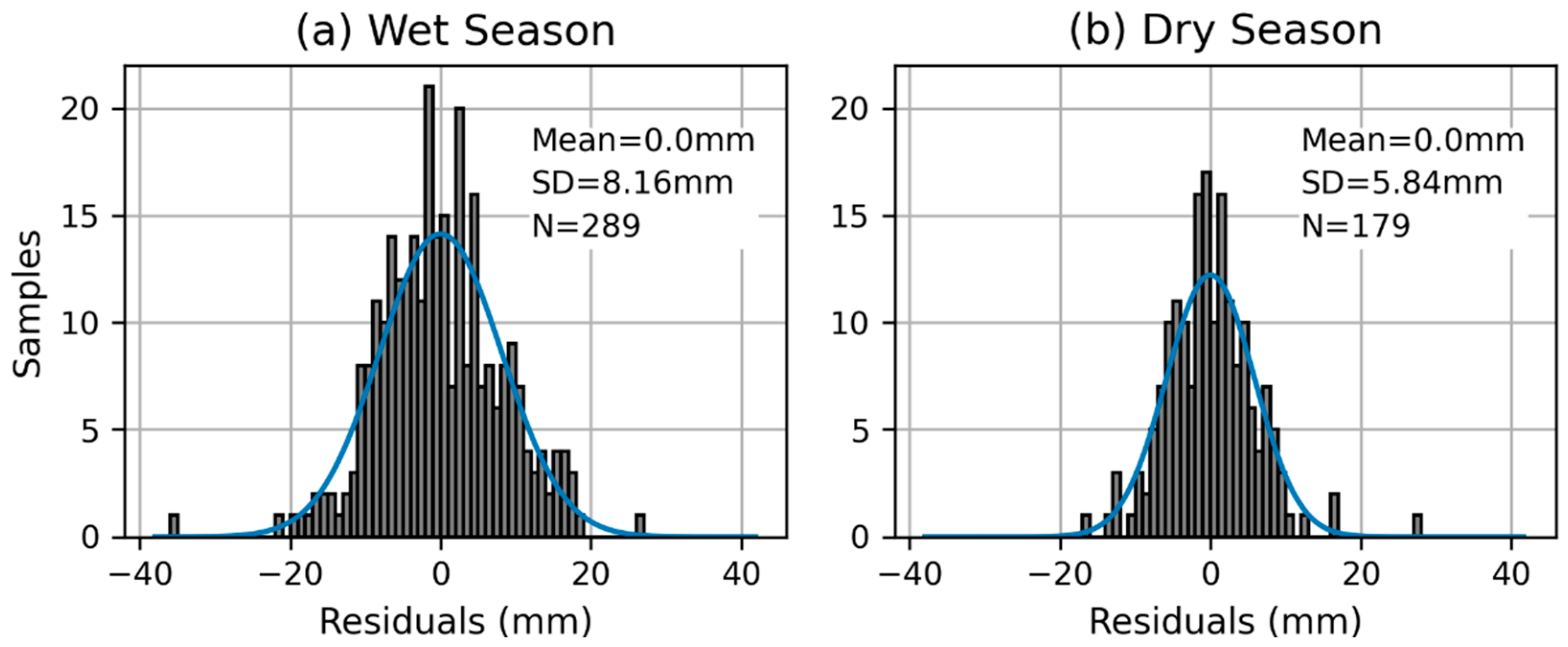
In the previous study [
42], the
PWV in July was greater than in January in Japan. Shoji [
42] also showed the same tendency in the root mean square (RMS) difference between the
GNSS and radiosonde
PWV. Moreover, the
GNSS PWV has a seasonal variation in Japan [
43]. We checked whether the error of the
InSAR PWV becomes larger in the wet season as with the error of the
GNSS PWV.
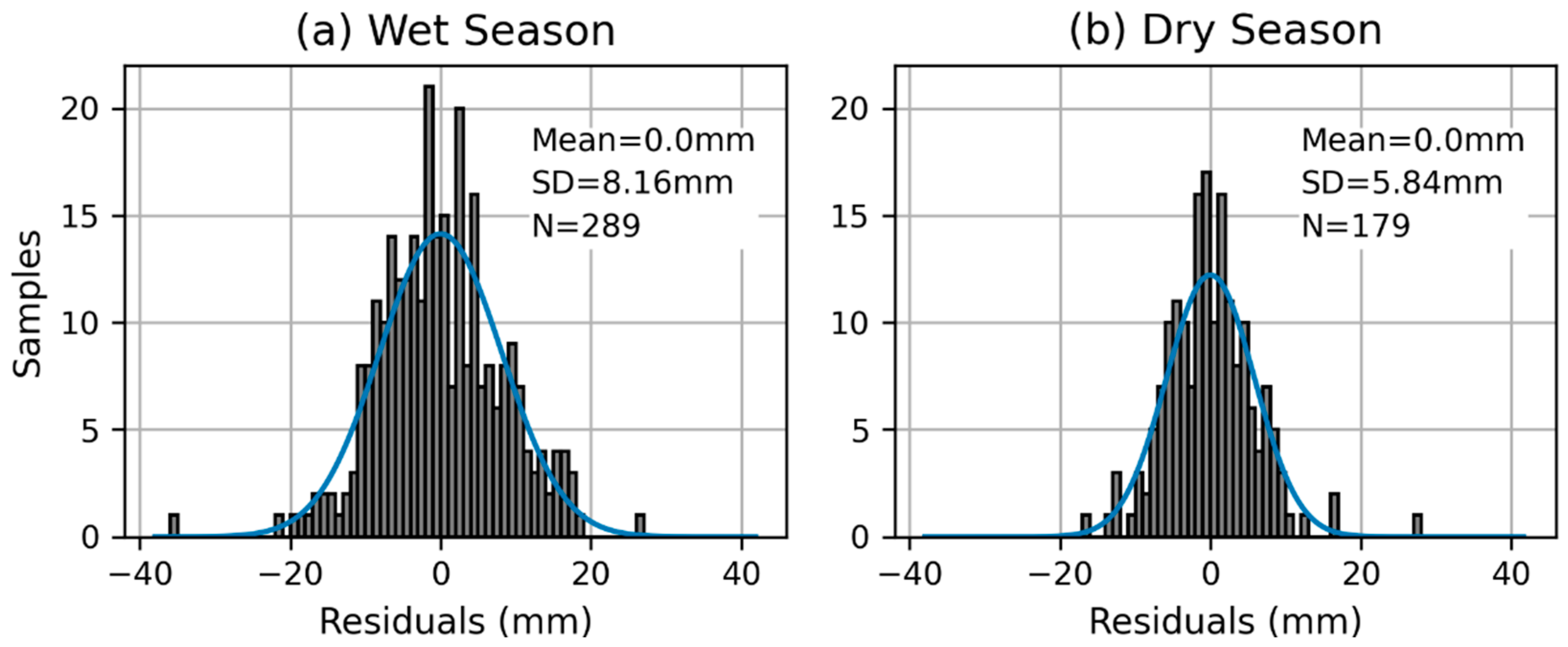
Figure 7 shows the
distribution of data that were acquired during the wet season. As a result, the mean of
GNSS ZTD was larger in the wet season than in other months (hereafter referred to as the dry season) in our case. The mean and standard deviation of
were 0.00 and 8.16 mm, respectively, during the wet season.
in the wet season became 2.99 mm. On the other hand, the mean and standard deviation of
were 0.00 and 5.84 mm, respectively, in the dry season.
in the dry season became 2.91 mm. Our results indicate that
was larger in months when the
GNSS ZTD was also larger than that in other months. We concluded that
was greater in the wet season than that in the dry season.
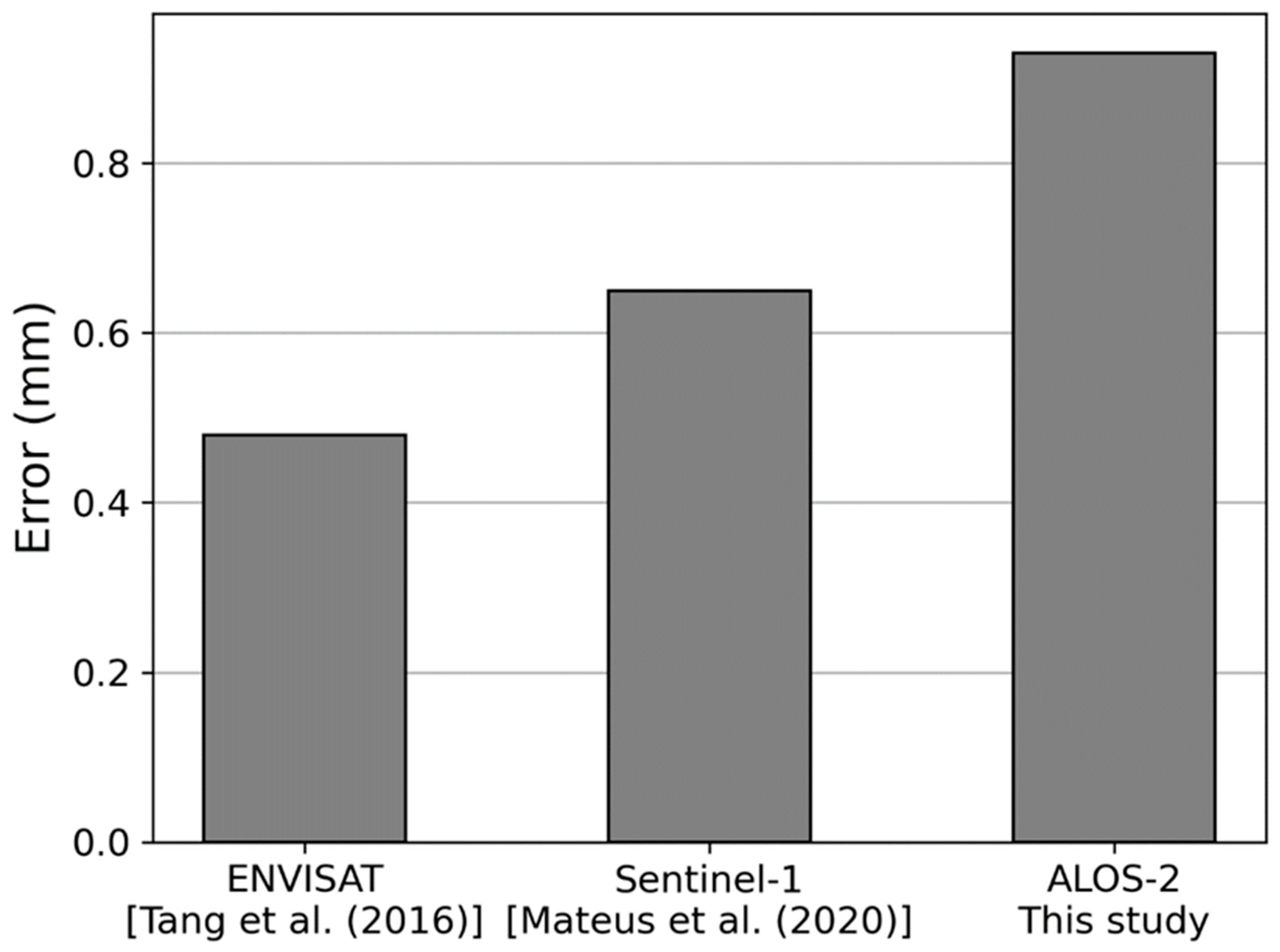
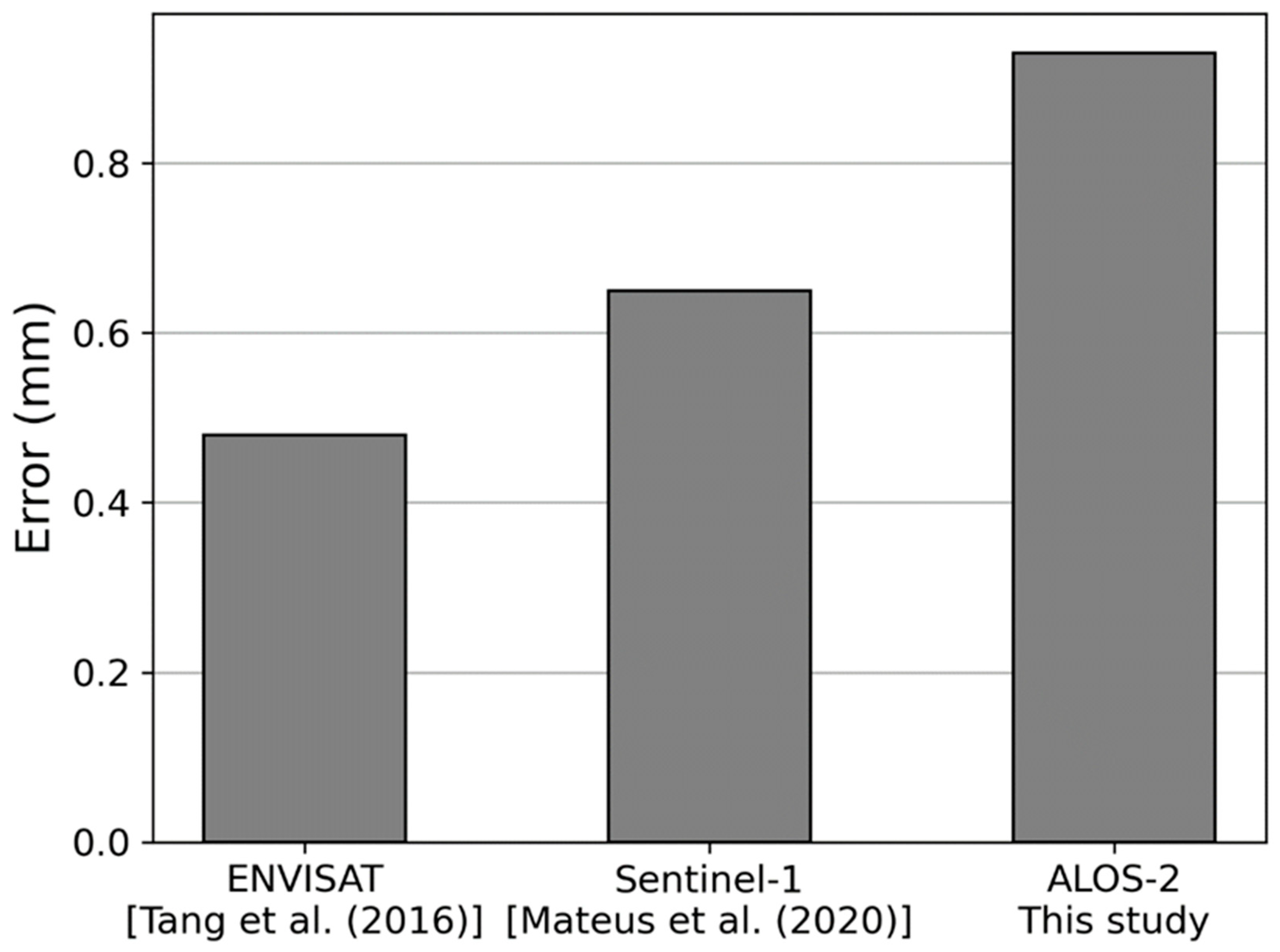
We compared the error of the L-band
InSAR PWV (
) estimated from this study with that of the C-band
InSAR PWV estimated by other studies [
12,
20] (
Figure 5). Note that previous studies only estimated the standard deviation of residuals between
and
. Therefore,
Figure 6 shows the relative
PWV errors of
InSAR against
GNSS. The error of the L-band
InSAR PWV compared with the
GNSS PWV (
) can be estimated by Equation (24) with
(=7.4mm) instead of
. In the previous study [
20], the ENVISAT difference
PWV error was 0.675 mm, which was the average of the mean absolute error (MAE) of difference
PWVs between
InSAR and
GNSS for 10 interferograms in the United States (US). Here, we divided their
PWV errors by
using Equation (22) and replaced the
ZTD with
PWV to obtain the above error values, resulting in the ENVISAT
PWV error in [
20] becoming 0.48 mm. The Sentinel-1
PWV error was 0.65 mm, which was the average of the root mean square error (RMSE) between the
InSAR and
GNSS PWV of 10 interferograms in the US [
12]. The L-band
InSAR PWV error in this study was found to be 0.93 mm by solving the following equation:
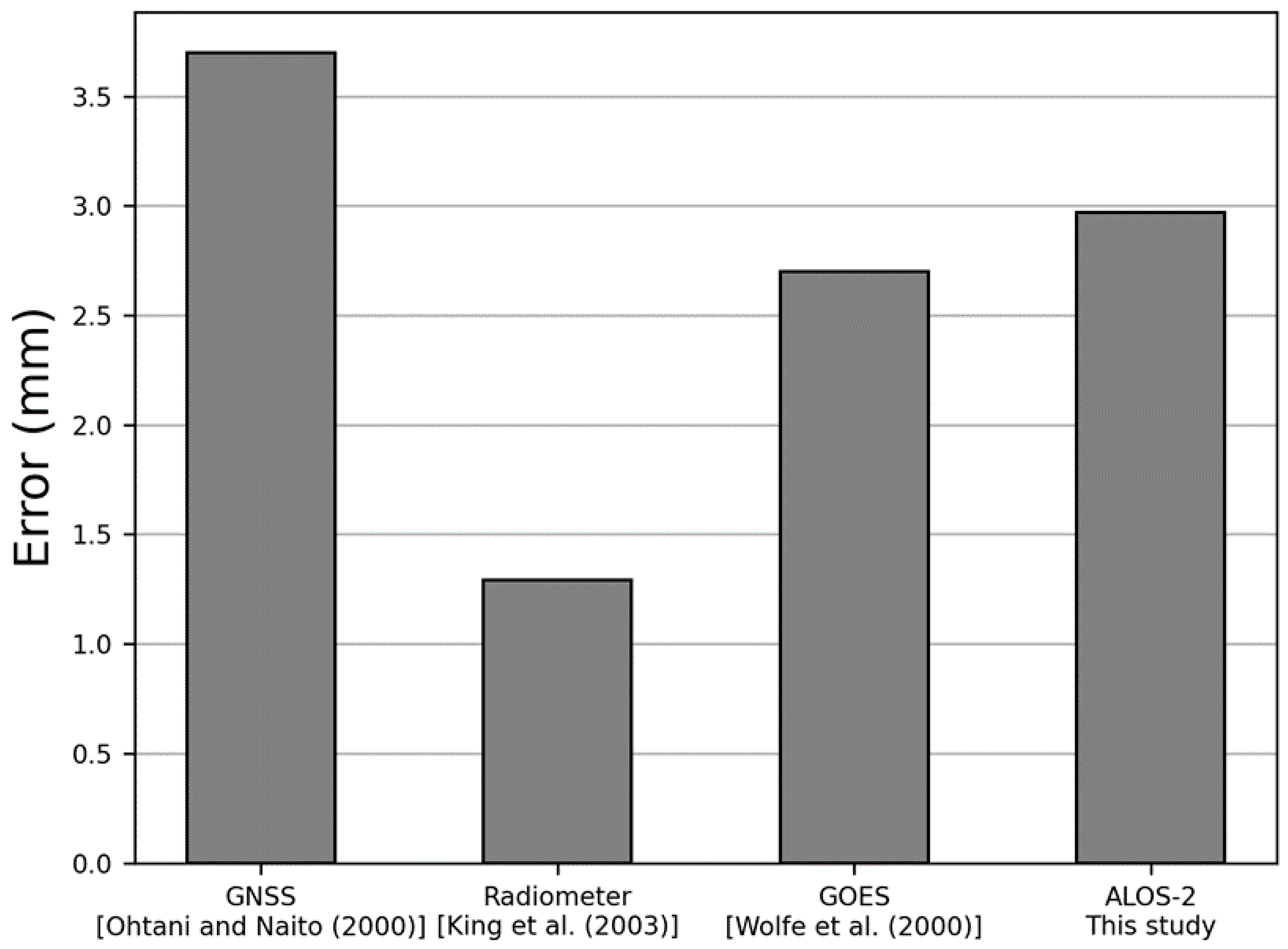
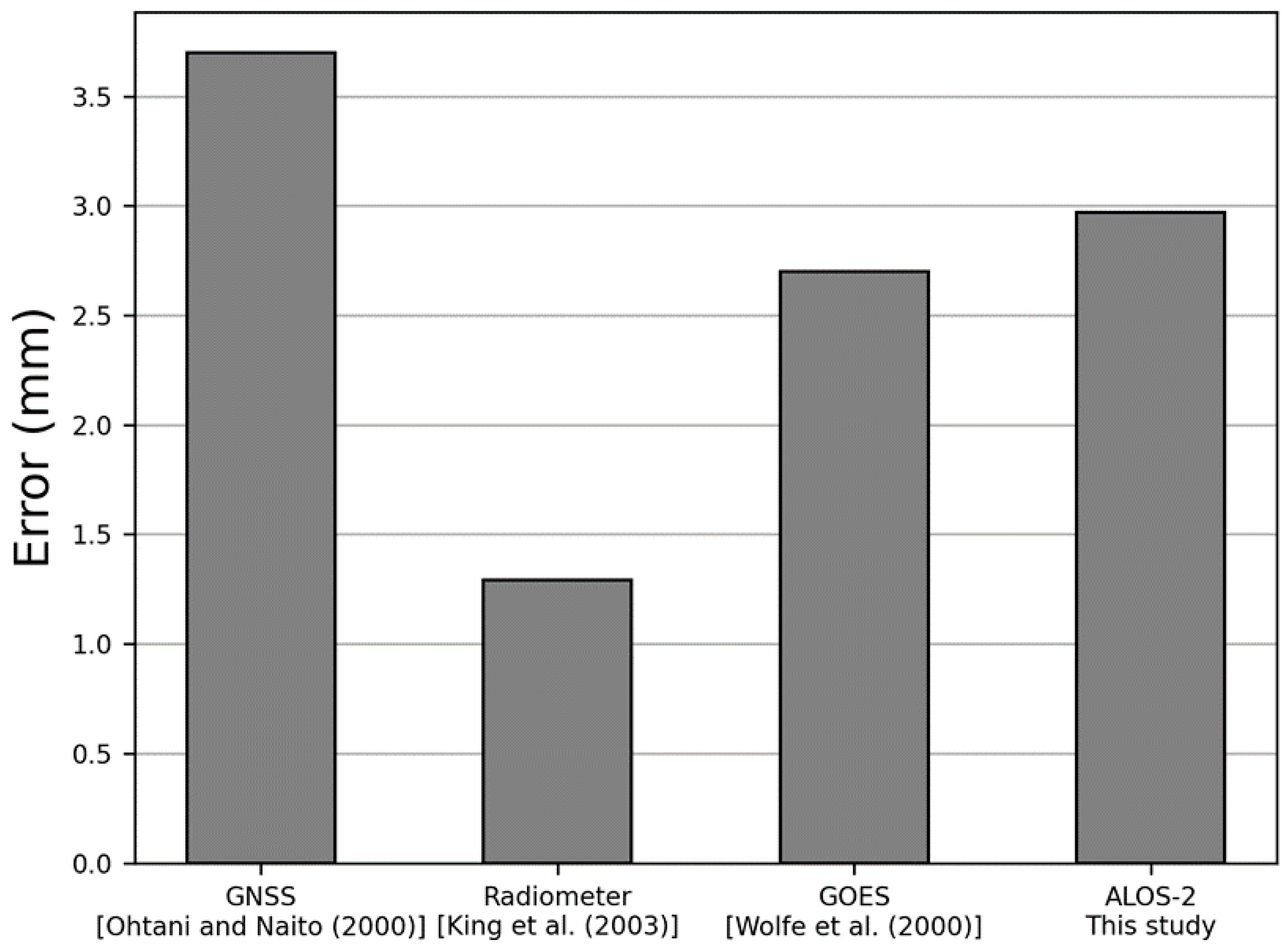
Figure 6 summarizes the observation errors of other kinds of
PWV observations and the error of the L-band
InSAR PWV estimated in this study. These observation errors are relative errors to the radiosonde observation. In [
39], the
GNSS error was 3.7 mm, which was the RMSE with 10 radiosonde stations observed for one year in Japan. The radiometer error was 1.29 mm, which was the RMSE against the radiosonde
PWV in the US [
40]. The Geostationary Operational Environmental Satellite (GOES) error was 2.7 mm, which was the RMSE against the radiosonde
PWV in the US [
41]. Comparing the estimated L-band
InSAR PWV error with those of other techniques, as shown in
Figure 6, the L-band
InSAR PWV observation showed relatively worse accuracy than others. Nonetheless, the
PWV error level of 2.96 mm in the L-band
InSAR would be too small for meteorological use as
PWV in Japan ranges from 10 to 50 mm in ordinary conditions, and sometimes exceeds 80 mm in extreme weather conditions [
43].
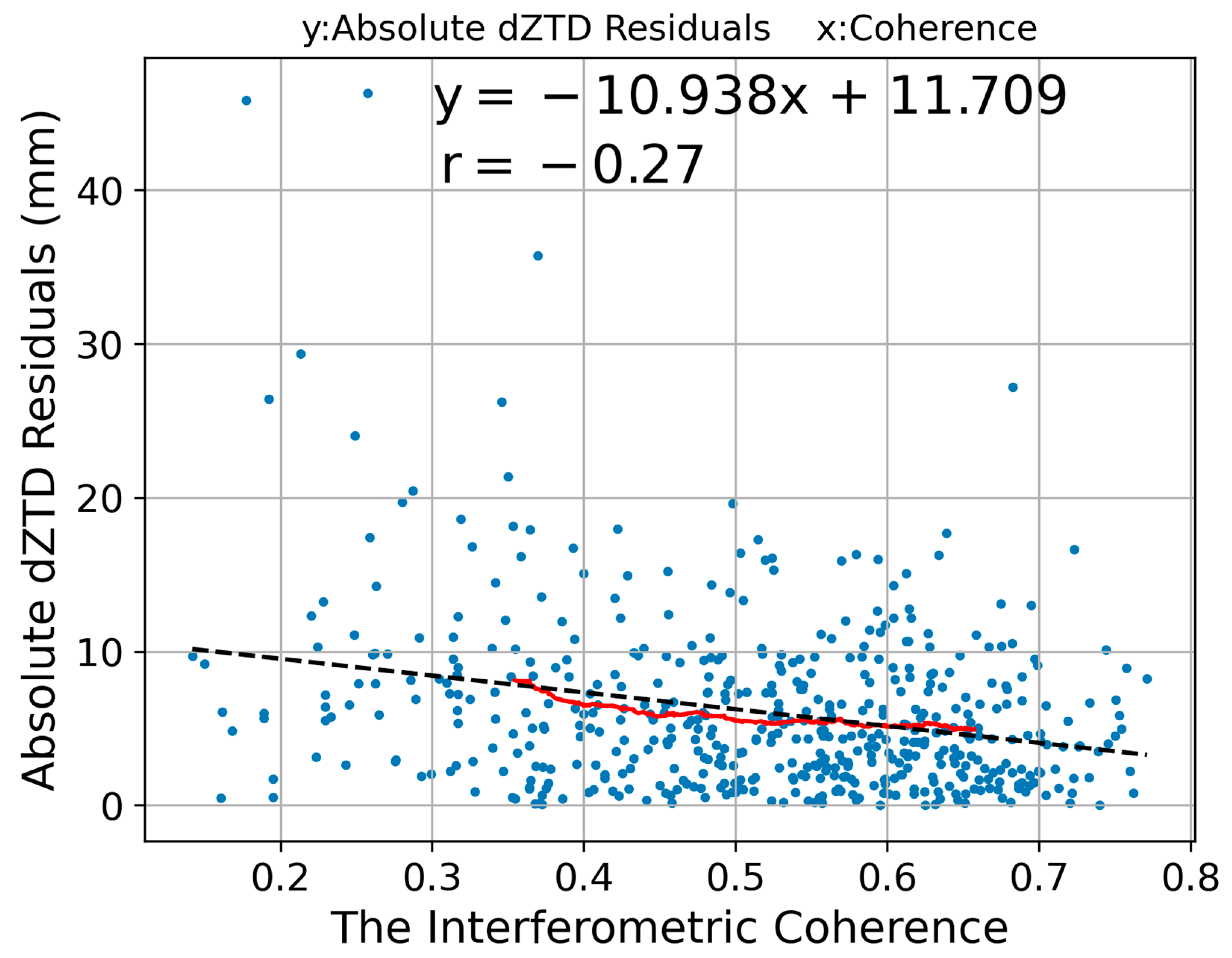
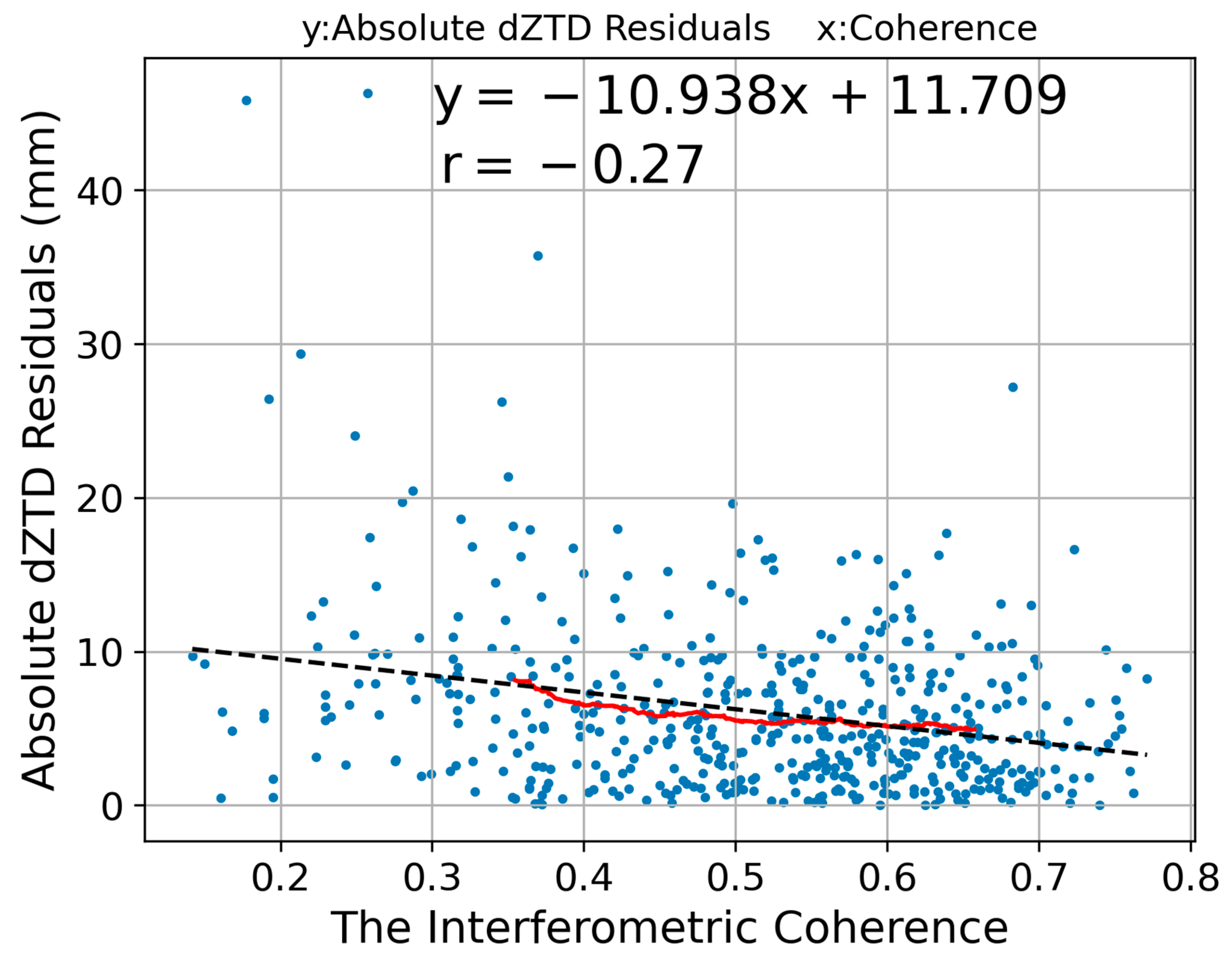
We investigated the relationship between the interferometric coherence and the
InSAR atmospheric observation accuracy. Although we used
InSAR observation values with an interferometric coherence greater than 0.3 to estimate the amount of offset in a specific
InSAR scene, we also plotted the absolute values of estimated
with a coherence lower than 0.3.
Figure 8 shows the scatterplot of absolute
dZTD residuals (
) as a function of the interferometric coherence. We also plotted the regression line and the moving average line (the black dashed line and the solid red line in
Figure 8) to visually elucidate the relationship between the interferometric coherence and absolute values of estimated
. The correlation coefficient between the scatterplot of absolute
dZTD residuals and the coherence was −0.27, indicating a weak negative correlation between the residuals and the coherence. If the interferometric coherence is lower,
InSAR observation becomes less precise, which may be due to the decorrelation noise.
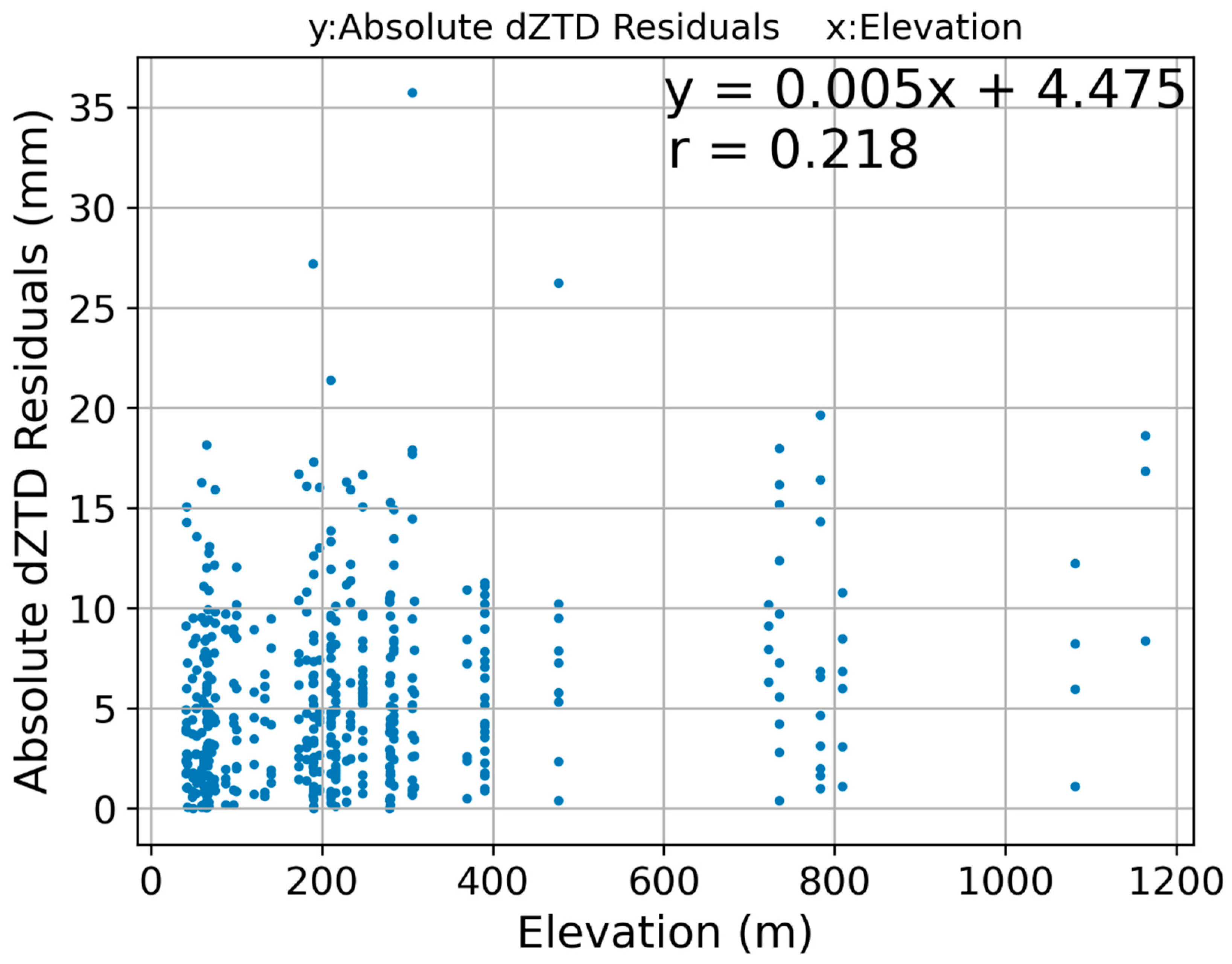
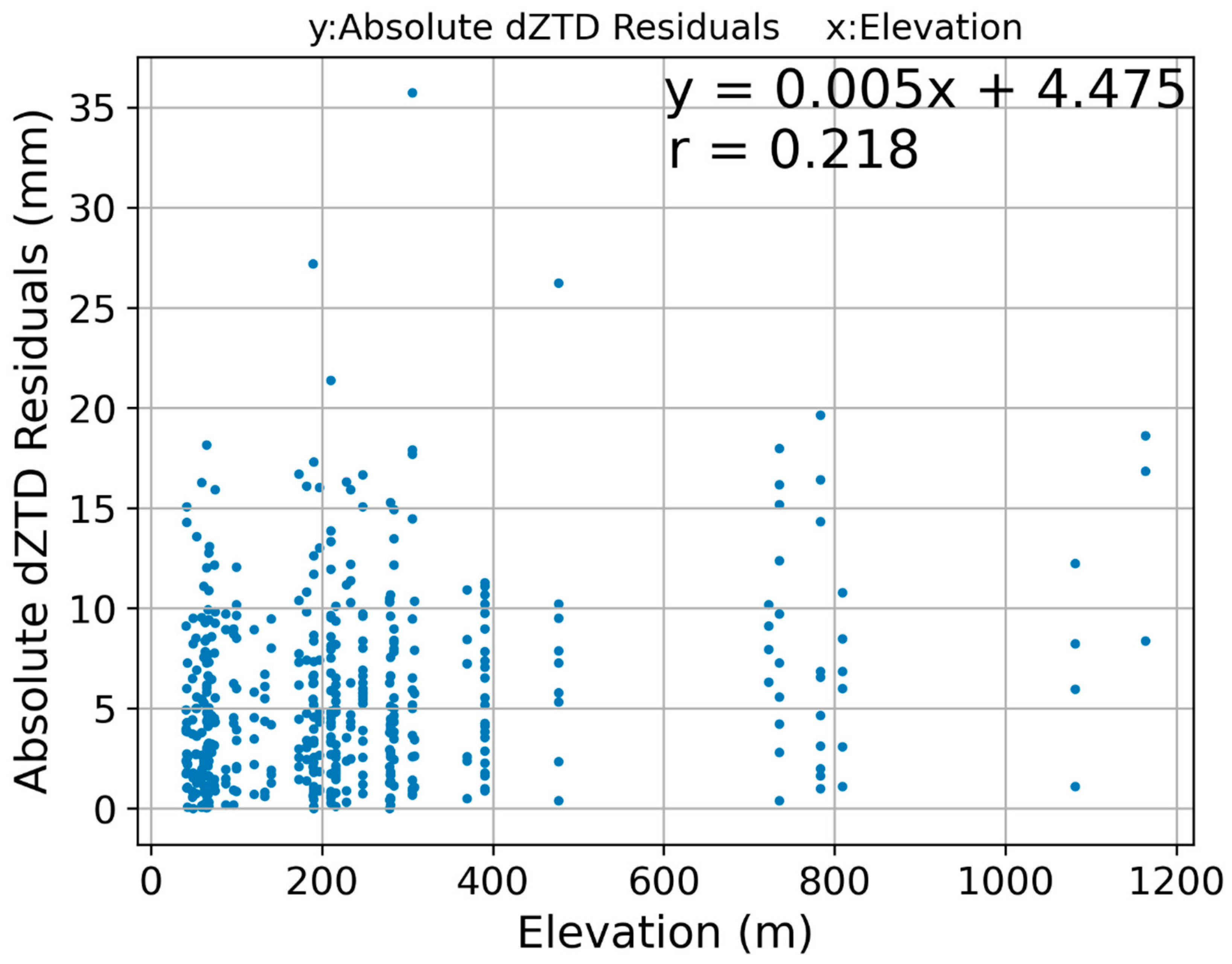
In addition, we investigated the height dependence of the
ZTD residual between
InSAR and
GNSS.
Figure 9 shows the scatter plot of the residuals of all four areas as a function of observation altitude and a fitting line with a correlation coefficient of 0.218. Similar to the relation between the interferometric coherence and absolute values of estimated
, we found a weak positive correlation between the elevation and absolute values of estimated
. Possible explanations for the existence of this weak positive correlation may be that (1) at higher altitudes (around 1000–2000 m), atmospheric turbulence is more severe and highly variable, and (2) some
GNSS stations in mountainous areas were affected by topographic configurations by, for example, blocking lower-elevation microwave paths. However, these possible explanations are only speculation, and the number of samples and survey areas seem to be insufficient to derive any conclusions. Therefore, the height dependence of the
ZTD residuals and its mechanism should be further investigated in future works.
6. Discussion
The comparison of different seasons in
Figure 7 shows interesting features.
during the wet season was 1.50 times larger than that during the dry season. This result indicated that in the wet season, when the
ZTD was large, the discrepancy between
GNSS and
InSAR atmospheric observation also increased. Furthermore, the shapes of the histograms in
Figure 7 visually suggest that the shape in the wet season deviated further from the fitted Gaussian distribution than that in the dry season.
InSAR observations reflect the delay along the line-of-sight (within a narrow tube extended between the satellite and the ground pixel), but
GNSS ZTDs reflect the average of the delay within the inverse cone space above
GNSS stations. These different characteristics may affect
ZTD observation when atmospheric water vapor largely varies over small distances (for instance, orders of from hundreds to thousands of meters). If this difference was a reason that the residual became greater in the wet season than in the dry season, then water vapor may severely fluctuate in the wet season compared to in the dry season.
We evaluated the relative error of the L-band
InSAR PWV against the
GNSS as 0.93 mm, which was comparatively worse than the C-band
InSAR PWV error in previous studies [
12,
20]. We summarized possible factors of the difference between previous studies and our study as follows: (1) We performed a comparison between
GNSS data and a collocated
InSAR pixel, but the average of multiple
InSAR pixels (for example, the radius of a few kilometers) surrounding
GNSS stations was used in previous studies. As our method compared the
dZTD of one
InSAR pixel (resolution of several hundred meters or larger by multilooking and filtering) with
GNSS dZTD, residual pixel-scale noises may affect the error level estimation. Here, note that extending the averaging radius would make the interpretation more complex in terms of the pixel height and the associated stratified delay effect. Especially in mountainous areas, if we set a large radius for averaging, the averaged pixel value would make the
InSAR delay value more suitable for the comparison to
GNSS in terms of horizontal representativeness but may represent a delay value at a different height due to variable topography height. This causes another problem for the comparison of
InSAR and
GNSS. Therefore, we need to determine the averaging radius carefully. According to our understanding, both too large and too small radii would be inappropriate, although we do not have an idea of how to determine the radius for averaging. (2) While we removed
from the total phase differences of the L-band
InSAR, it should be noted that our ionospheric correction cannot perfectly remove the effect of the ionosphere, and thus the residual in the ionospheric correction may have had a negative impact on the
InSAR PWV error estimation in this study. Previous studies have not removed it as they considered its effect to be negligible as in the case of C-band
InSAR, which has a higher microwave frequency and, thus, lower ionospheric phase contamination. (3) Previous studies [
12,
20] used SAR images acquired during drier seasons than the Japanese summer season. The larger the
PWV values are, the larger the
InSAR PWV errors might be [
42]. On the other hand, there is no difference between the
GNSS atmospheric processing in our study and that in the previous two studies. Due to the above-described reasons, the error of L-band
InSAR PWV estimated in this study may, to some extent, become larger than the error of C-band
InSAR.
We also compared the L-band
InSAR PWV error with other
PWV observation errors in
Figure 6. Contrary to our intuition, the
GNSS PWV error was larger than the L-band
InSAR PWV error evaluated in this study. Among the reasons for such a contradiction may be that we could not compare the
InSAR observation with the radiosonde directly as no available data existed; however, the estimated L-band
InSAR error included the
GNSS observation error. Therefore, our estimated
InSAR error included errors of both the
GNSS and the radiosonde, resulting in the tendency towards larger estimation to some extent. Nevertheless, the estimated L-band
InSAR PWV error was approximately the same order as other
PWV observation errors. In the future, the
InSAR PWV error should be directly compared with radiosonde
PWV. Another reason for this may be that the
GNSS PWV error was derived at the end of the 20th century. Recently,
GNSS processing techniques have been further improved, and the number of available
GNSS satellites is increasing. Therefore, the
GNSS PWV observation would be more accurate than that at the time of the previous study.
We evaluated the relationship between
and the interferometric coherence. In
Figure 8, the smaller the interferometric coherence was, the larger the absolute value (
) tended to be. Especially in the range of coherence values lower than 0.3, the number of samples was small, and there were some extraordinarily large
. Our method did not use pixels with a coherence of less than 0.3 for offset estimation. Therefore, the absolute values of
with a coherence of less than 0.3 tended to largely deviate and may have had bias. It is important to define the threshold of the interferometric coherence appropriately when estimating offsets.
7. Conclusions
We estimated the
dZTD distribution using L-band ALOS-2
InSAR data and calculated the residuals between
and
using the error propagation theory. The estimated standard deviation of residuals was 7.36 mm, which was used to estimate the observation error of
PWV derived from
InSAR data, which was finally found to be 2.96 mm. The estimated L-band
InSAR PWV error was comparable to that of other
InSAR observations evaluated in previous studies. We investigated the dependences of the observation season and altitude and found that the standard deviation of the residual increased in the wet season, which may be due to the high variability and a larger amount of water vapor in this season. The height dependence was not suggested in our analysis. This study clarified that the
InSAR water vapor observation using L-band
InSAR has significant accuracy compared to C-band
InSAR, which showed its usefulness for the data assimilation into meso-scale weather prediction [
7,
9,
18,
44], indicating that L-band
InSAR also has the potential for improving the precipitation forecast. At present, there are no experiments on the precipitation forecast using the L-band
InSAR data assimilation. In the near future, high-spatial resolution water vapor mapping by
InSAR may be utilized for operational meso-scale weather forecasting to enhance its prediction ability, especially against localized severe rainfall. The number of SAR satellites from both governmental space agencies and private companies is expected to increase in the coming decades, and thus, more
InSAR data will be available for meteorological applications. The use of high-spatial and -temporal density
InSAR data for weather forecasting would improve precipitation prediction for localized heavy rainfall, which is currently difficult to predict accurately, and contribute to mitigating the social damages caused by hydrological disasters related to heavy rainfall.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}