
Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints



Abstract
:1. Introduction
2. Methods
3. Results
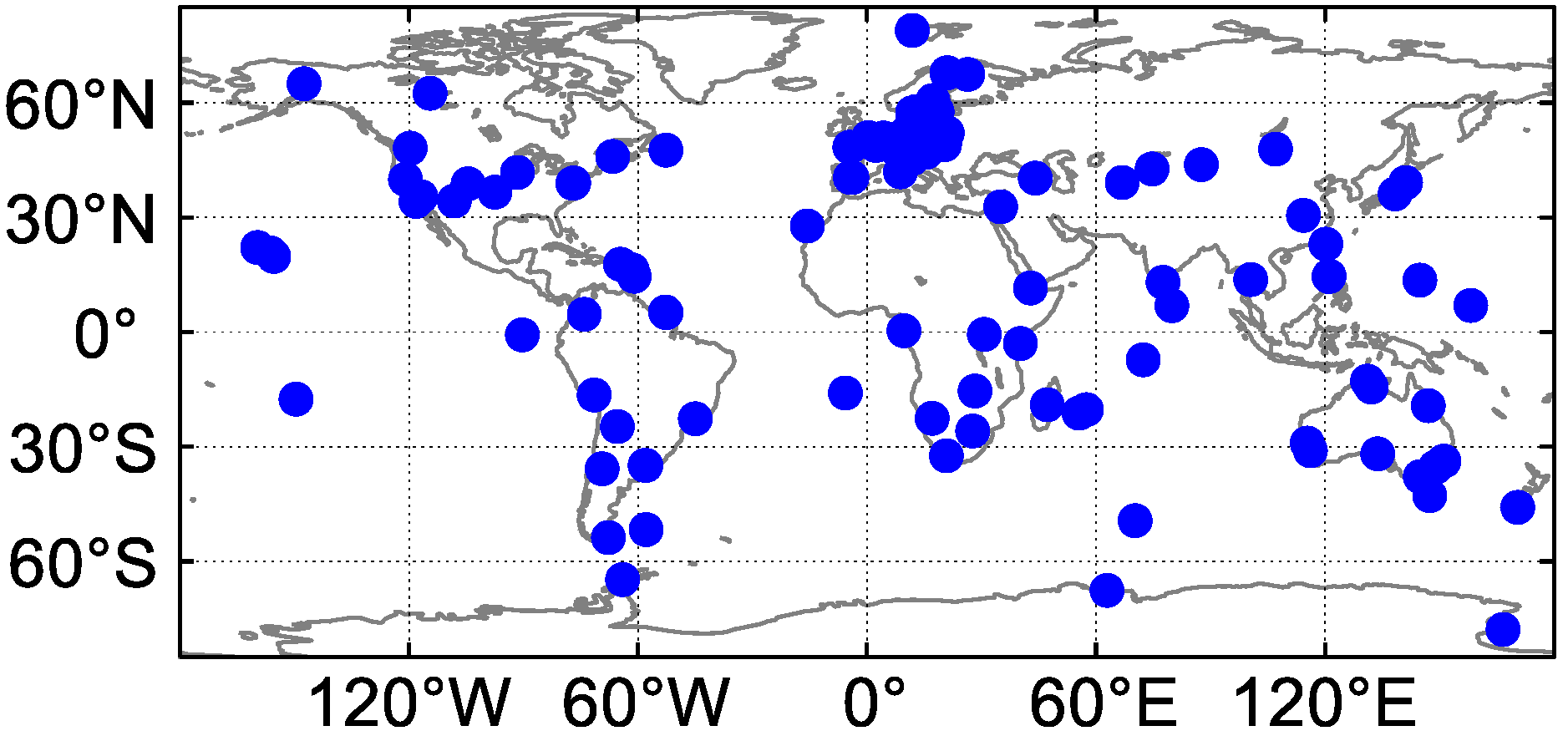
3.1. Data Sets
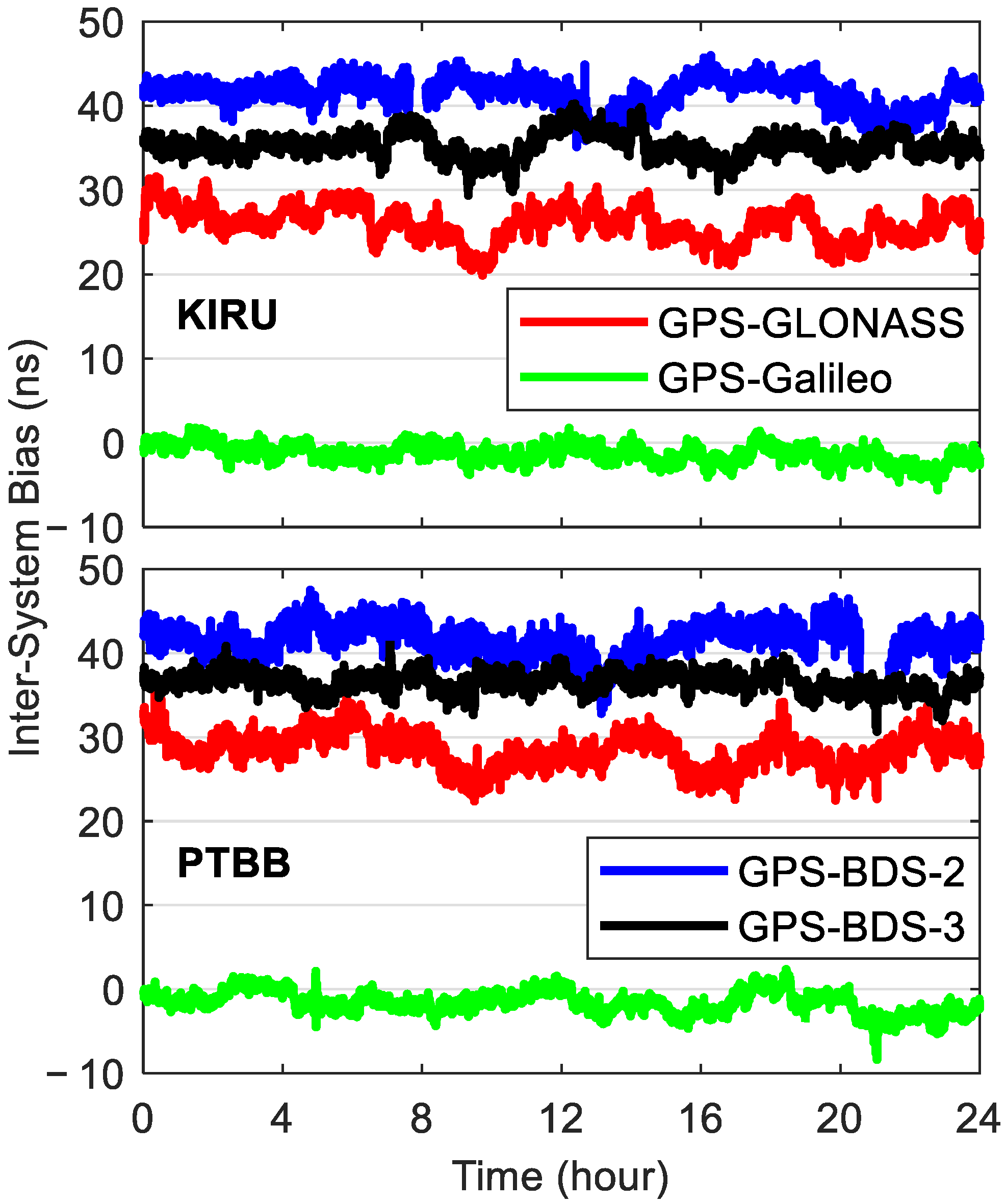
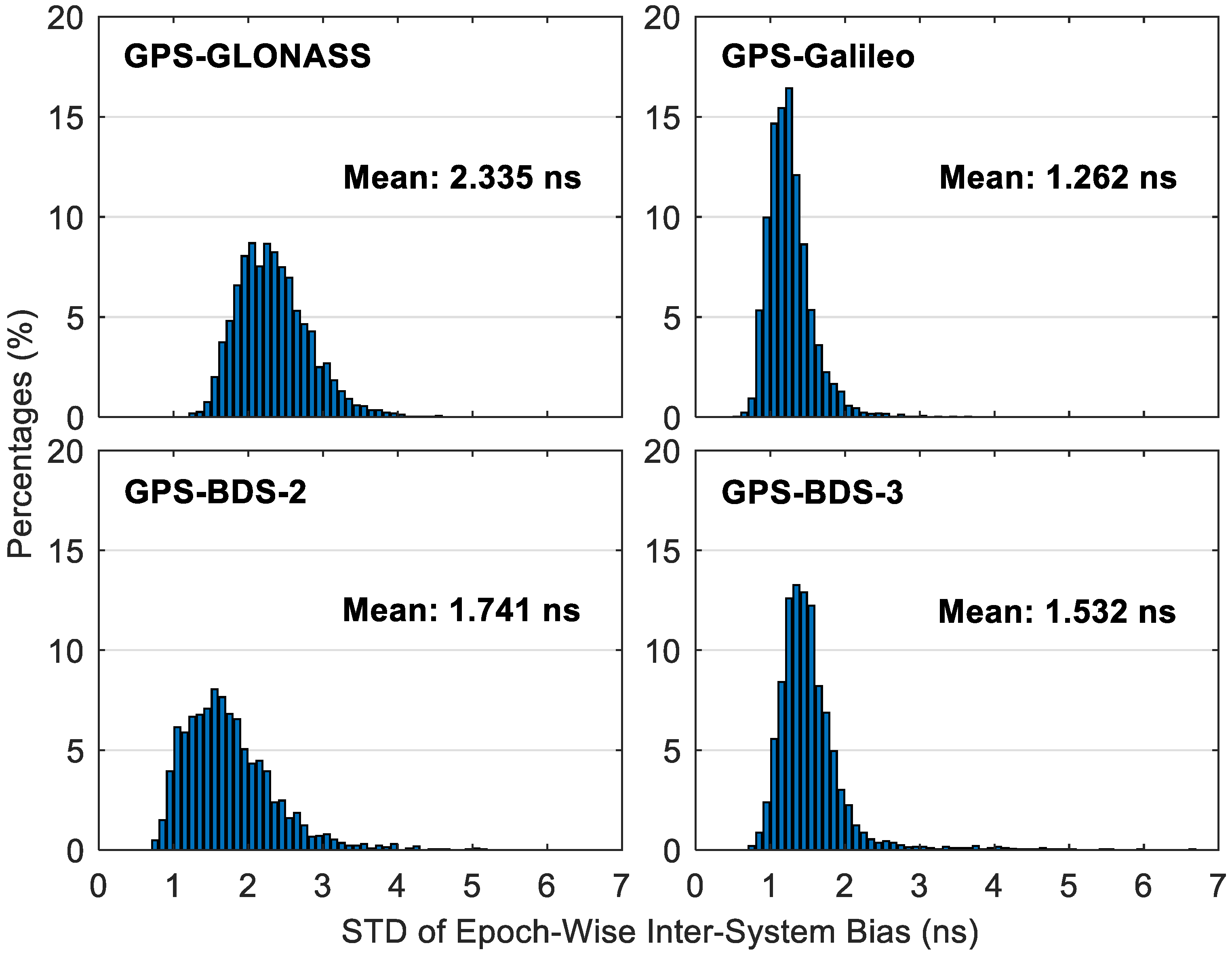
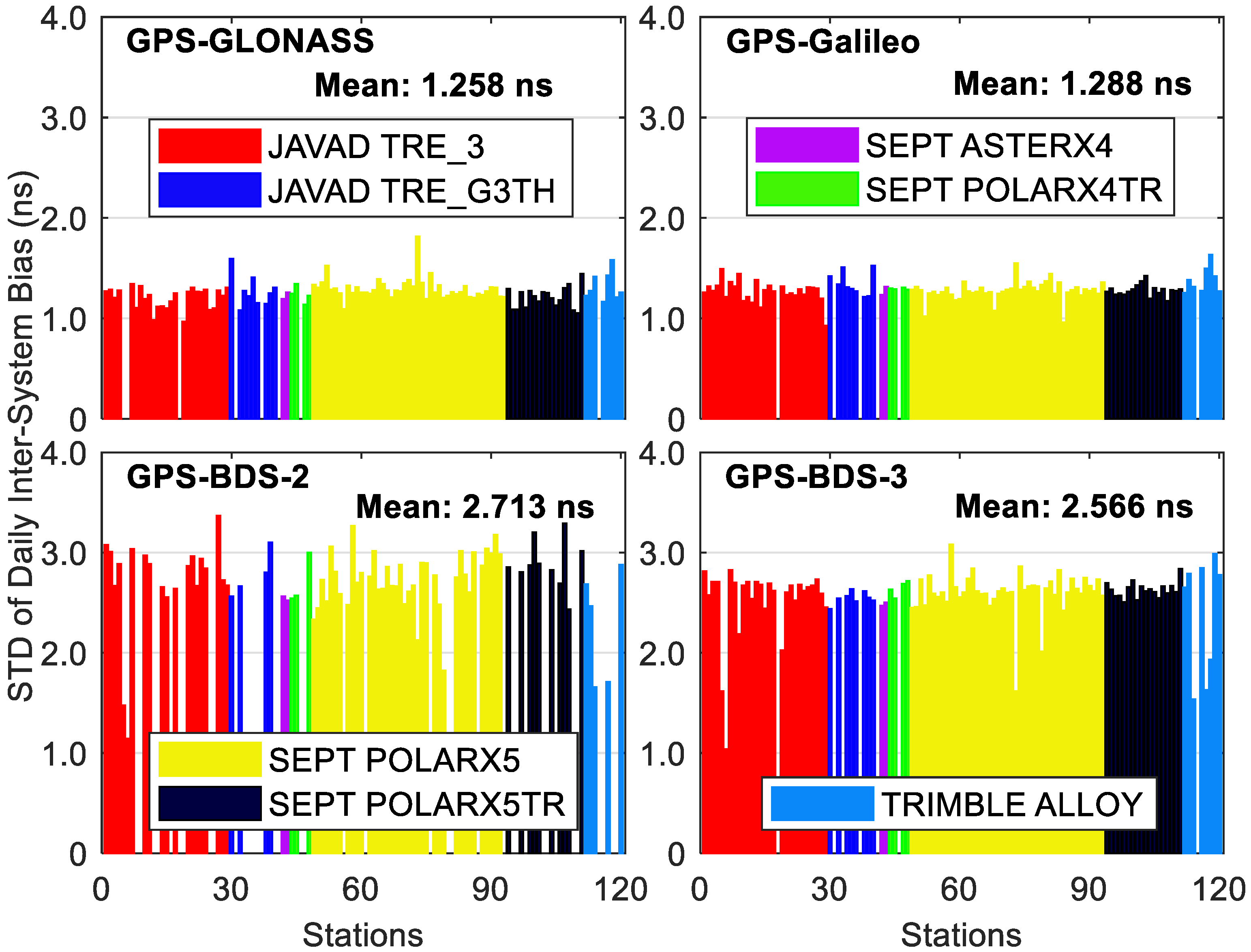
3.2. Characteristics of ISB Estimates
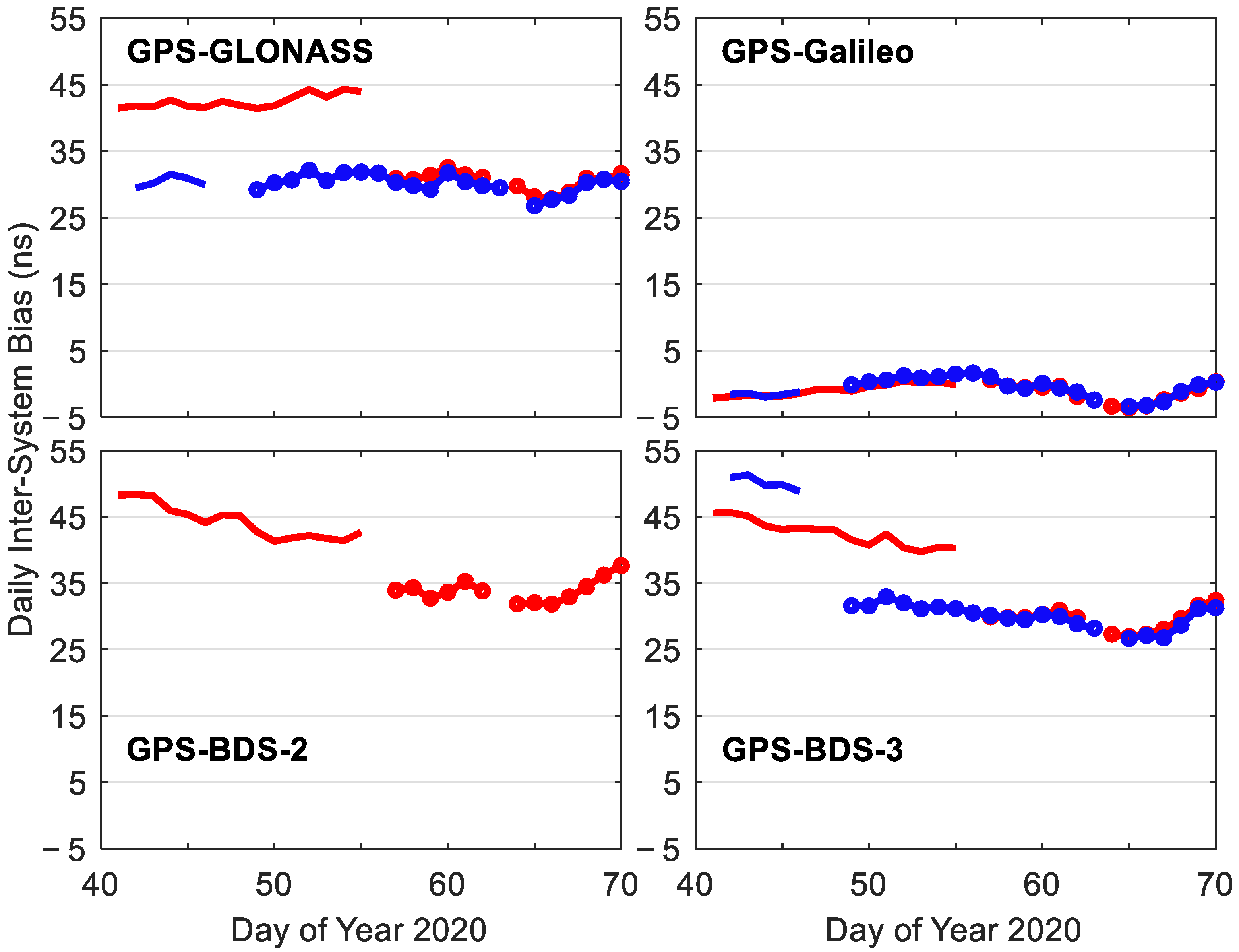
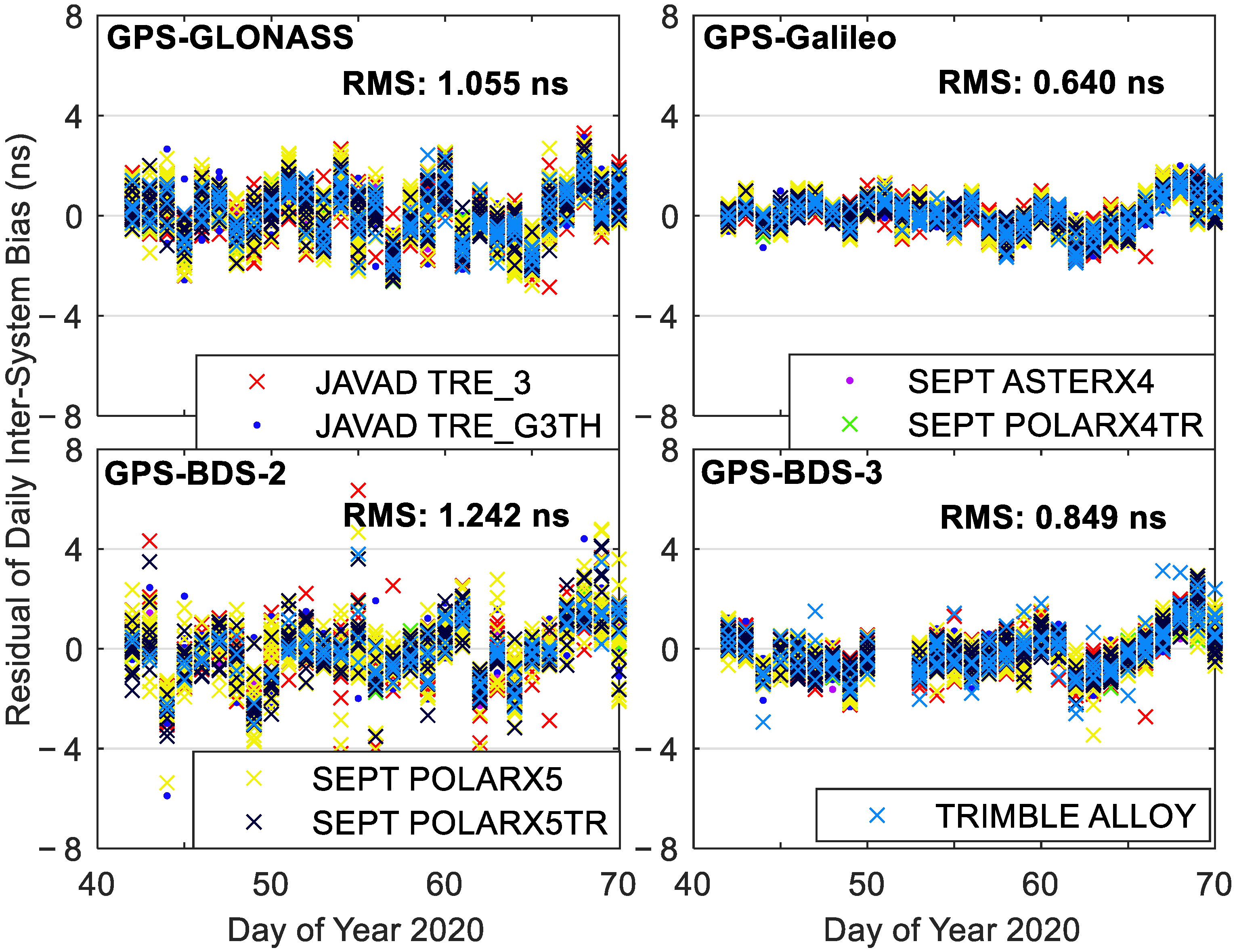
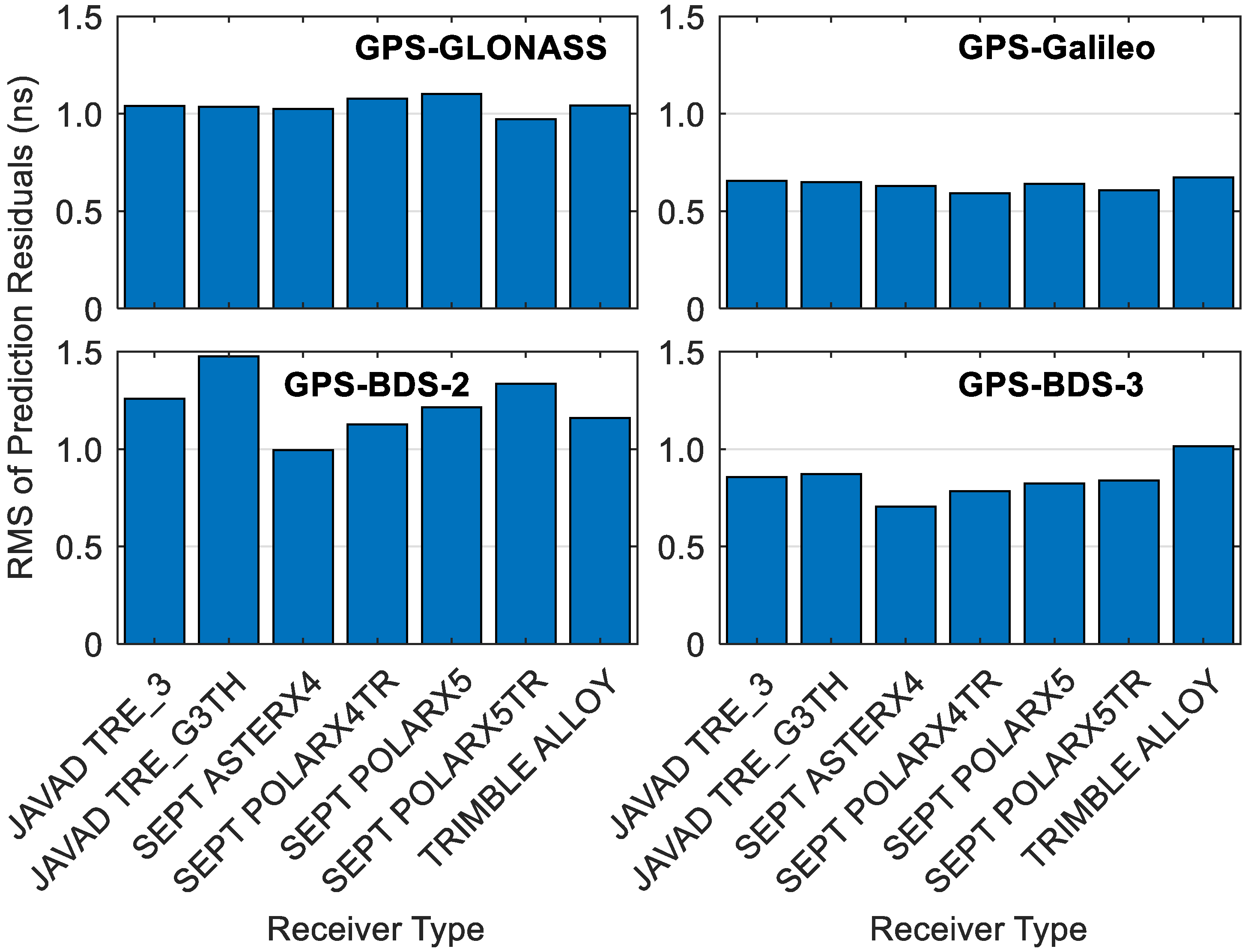
3.3. Prediction of Daily ISBs
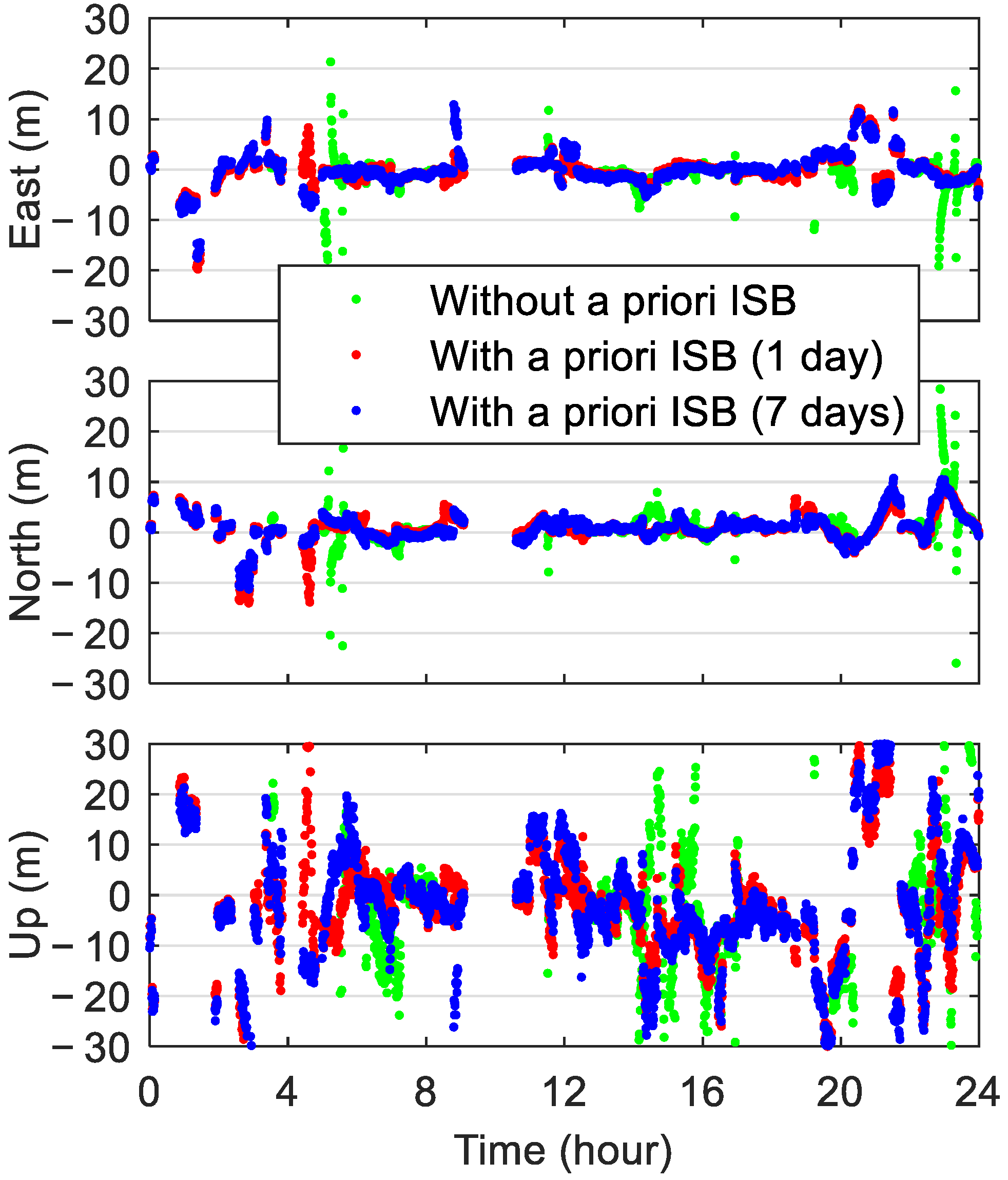
3.4. Performance of Four-System Integrated SPP with a Priori ISB Constraints
3.5. ISB Estimates Derived from Low-Cost Receivers
3.6. ISB Estimates Derived from Smartphones
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, L.; Zhang, X.; Liu, J.; Li, X.; Li, X. Performance Evaluation of Single-frequency Precise Point Positioning with GPS, GLONASS, BeiDou and Galileo. J. Navig. 2017, 70, 465–482. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Paziewski, J.; Wielgosz, P. Accounting for Galileo–GPS inter-system biases in precise satellite positioning. J. Geod. 2015, 89, 81–93. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Sui, L.; Xiao, G.; Zhao, D.; Chai, H.; Liu, C. Estimating inter-system biases for tightly combined Galileo/BDS/GPS RTK. Adv. Space Res. 2020, 65, 572–585. [Google Scholar] [CrossRef]
- Mi, X.; Zhang, B.; Yuan, Y. Multi-GNSS inter-system biases: Estimability analysis and impact on RTK positioning. GPS Solut. 2019, 23, 81. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, W.; Chen, H.; Zhao, W.; Huo, L.; Huang, L.; Chen, Q. An analysis of inter-system biases in BDS/GPS precise point positioning. GPS Solut. 2019, 23, 116. [Google Scholar] [CrossRef]
- Hong, J.; Tu, R.; Gao, Y.; Zhang, R.; Fan, L.; Zhang, P.; Liu, J. Characteristics of inter-system biases in Multi-GNSS with precise point positioning. Adv. Space Res. 2019, 63, 3777–3794. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, C.; Xiao, G.; Zhang, X.; Feng, X. Estimating and Analyzing Long-Term Multi-GNSS Inter-System Bias Based on Uncombined PPP. Sensors 2020, 20, 1499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, F.; Dong, D.; Li, P.; Li, X.; Schuh, H. Influence of stochastic modeling for inter-system biases on multi-GNSS undifferenced and uncombined precise point positioning. GPS Solut. 2019, 23, 59. [Google Scholar] [CrossRef]
- Cao, X.; Shen, F.; Zhang, S.; Li, J. Time delay bias between the second and third generation of BeiDou Navigation Satellite System and its effect on precise point positioning. Measurement 2021, 168, 108346. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, H.; Gao, Y.; Jiang, W.; Liu, X. Evaluation of Inter-System Bias between BDS-2 and BDS-3 Satellites and Its Impact on Precise Point Positioning. Remote Sens. 2020, 12, 2185. [Google Scholar] [CrossRef]
- Jiang, N.; Xu, Y.; Xu, T.; Xu, G.; Sun, Z.; Schuh, H. GPS/BDS short-term ISB modelling and prediction. GPS Solut. 2017, 21, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Li, X.; Zhao, Q.; Li, G. Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization. J. Geod. 2019, 93, 383–398. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D. A statistical characterization of the Galileo-to-GPS inter-system bias. J. Geod. 2016, 90, 1279–1291. [Google Scholar] [CrossRef]
- Zeng, A.; Yang, Y.; Ming, F.; Jing, Y. BDS–GPS inter-system bias of code observation and its preliminary analysis. GPS Solut. 2017, 21, 1573–1581. [Google Scholar] [CrossRef]
- Torre, A.D.; Caporali, A. An analysis of intersystem biases for multi-GNSS positioning. GPS Solut. 2015, 19, 297–307. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Types | Number | Stations |
|---|---|---|
| JAVAD TRE_3 | 29 | SUTM, WIND, WUH2, POTS, URUM, ULAB, NYA2, ZAMB, MBAR, QUIN, BOGT, CUSV, ARHT, CRO1, GUAM, SOD3, FFMJ, WTZZ, WARN, HUEG, LEIJ, GODN, GODS, STHL, POL2, BSHM, (SGOC, SGPO, LPGS) |
| JAVAD TRE_G3TH | 12 | MADR, GOLD, MCM4, PALM, GLPS, PIMO, PIE1, HRAO, FAIR, KOKV, AREQ, UNSA (DOY 41–48, 2020) |
| SEPT ASTERX4 | 3 | MIZU, OUS2, UNSA (DOY 49–70, 2020) |
| SEPT POLARX4TR | 5 | MOBS, SYDN, AGGO, OP71, BRUX (DOY 41–56, 2020) |
| SEPT POLARX5 | 45 | MAW1, MAR6, VIS0, USUD, JPLM, ARUC, DGAR, IISC, FALK, ABPO, SUTH, DARW, HAL1, MKEA, VACS, KIR0, MAO0, MAL2, FAA1, MAS1, REUN, PTGG, AJAC, CHPI, KIRU, REDU, VILL, JOZE, KOUR, (CEDU, HOB2, TID1, STR1, POHN, YAR3, KAT1, TOW2, GRAZ, YARR, ABMF, AREG, DJIG, NKLG, KITG, PADO) |
| SEPT POLARX5TR | 19 | ONSA, GODE, BREW, KOKB, NLIB, SPT0, MGUE, CEBR, NNOR, AMC4, BRUX (DOY 57–70, 2020), (HERS, THTG, KOUG, PTBB, STJ3, YEL2, USN7, HARB) |
| TRIMBLE ALLOY | 9 | KIR8, GOPE, CKSV, BRST, LMMF, RGDG, GANP, (KRGG, UNB3) |
| Time Span of Prediction | Accuracy of Predicted ISBs (ns) | |||
|---|---|---|---|---|
| GPS-GLONASS | GPS-Galileo | GPS-BDS-2 | GPS-BDS-3 | |
| 2 days | 1.377 | 1.054 | 1.856 | 1.444 |
| 3 days | 1.691 | 1.368 | 2.297 | 1.878 |
| 4 days | 1.759 | 1.605 | 2.522 | 2.156 |
| 5 days | 1.859 | 1.758 | 2.667 | 2.322 |
| 6 days | 1.819 | 1.867 | 2.831 | 2.471 |
| 7 days | 1.767 | 1.954 | 2.982 | 2.580 |
| Time Span of Prediction | Correction Rate of Predicted ISBs | |||
|---|---|---|---|---|
| GPS-GLONASS | GPS-Galileo | GPS-BDS-2 | GPS-BDS-3 | |
| 1 day | 96.6% | 78.0% | 97.1% | 97.9% |
| 2 days | 95.6% | 63.8% | 95.6% | 96.4% |
| 3 days | 94.6% | 53.0% | 94.6% | 95.3% |
| 4 days | 94.4% | 44.8% | 94.0% | 94.6% |
| 5 days | 94.1% | 39.5% | 93.7% | 94.2% |
| 6 days | 94.2% | 35.8% | 93.3% | 93.8% |
| 7 days | 94.3% | 32.8% | 93.0% | 93.5% |
| Strategy | Directions | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | ||
| Without A Priori ISB | East (m) | 0.537 | 0.543 | 0.642 | 1.092 | 2.103 |
| North (m) | 0.933 | 0.890 | 1.001 | 1.699 | 3.162 | |
| Up (m) | 2.804 | 2.688 | 2.964 | 4.911 | 9.238 | |
| 3D (m) | 3.003 | 2.883 | 3.193 | 5.310 | 9.988 | |
| With A Priori ISB (1 day) | East (m) | 0.522 | 0.517 | 0.600 | 0.856 | 1.574 |
| North (m) | 0.906 | 0.846 | 0.910 | 1.239 | 2.346 | |
| Up (m) | 2.696 | 2.549 | 2.684 | 3.728 | 7.128 | |
| 3D (m) | 2.892 | 2.735 | 2.897 | 4.020 | 7.667 | |
| With A Priori ISB (2 days) | East (m) | 0.532 | 0.529 | 0.614 | 0.873 | 1.612 |
| North (m) | 0.907 | 0.849 | 0.918 | 1.249 | 2.384 | |
| Up (m) | 2.690 | 2.548 | 2.702 | 3.792 | 7.321 | |
| 3D (m) | 2.888 | 2.737 | 2.919 | 4.086 | 7.866 | |
| With A Priori ISB (3 days) | East (m) | 0.537 | 0.536 | 0.627 | 0.895 | 1.648 |
| North (m) | 0.908 | 0.852 | 0.926 | 1.264 | 2.416 | |
| Up (m) | 2.695 | 2.553 | 2.727 | 3.860 | 7.526 | |
| 3D (m) | 2.894 | 2.745 | 2.947 | 4.159 | 8.075 | |
| With A Priori ISB (4 days) | East (m) | 0.545 | 0.546 | 0.638 | 0.915 | 1.676 |
| North (m) | 0.906 | 0.853 | 0.928 | 1.270 | 2.434 | |
| Up (m) | 2.705 | 2.569 | 2.768 | 3.939 | 7.695 | |
| 3D (m) | 2.904 | 2.762 | 2.988 | 4.239 | 8.243 | |
| With A Priori ISB (5 days) | East (m) | 0.556 | 0.563 | 0.658 | 0.941 | 1.739 |
| North (m) | 0.913 | 0.865 | 0.947 | 1.305 | 2.517 | |
| Up (m) | 2.708 | 2.588 | 2.826 | 4.058 | 8.058 | |
| 3D (m) | 2.911 | 2.787 | 3.052 | 4.365 | 8.619 | |
| With A Priori ISB (6 days) | East (m) | 0.569 | 0.582 | 0.684 | 0.983 | 1.812 |
| North (m) | 0.914 | 0.874 | 0.966 | 1.344 | 2.596 | |
| Up (m) | 2.702 | 2.597 | 2.884 | 4.227 | 8.430 | |
| 3D (m) | 2.909 | 2.801 | 3.117 | 4.544 | 9.005 | |
| With A Priori ISB (7 days) | East (m) | 0.575 | 0.591 | 0.692 | 1.002 | 1.861 |
| North (m) | 0.911 | 0.873 | 0.966 | 1.353 | 2.635 | |
| Up (m) | 2.698 | 2.604 | 2.907 | 4.316 | 8.700 | |
| 3D (m) | 2.906 | 2.809 | 3.140 | 4.633 | 9.279 | |
| Strategy | Directions | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | ||
| With A Priori ISB (1 day) | East (%) | 3 | 5 | 7 | 22 | 25 |
| North (%) | 3 | 5 | 9 | 27 | 26 | |
| Up (%) | 4 | 5 | 9 | 24 | 23 | |
| 3D (%) | 4 | 5 | 9 | 24 | 23 | |
| With A Priori ISB (2 days) | East (%) | 1 | 3 | 4 | 20 | 23 |
| North (%) | 3 | 5 | 8 | 26 | 25 | |
| Up (%) | 4 | 5 | 9 | 23 | 21 | |
| 3D (%) | 4 | 5 | 9 | 23 | 21 | |
| With A Priori ISB (3 days) | East (%) | 0 | 1 | 2 | 18 | 22 |
| North (%) | 3 | 4 | 7 | 26 | 24 | |
| Up (%) | 4 | 5 | 8 | 21 | 19 | |
| 3D (%) | 4 | 5 | 8 | 22 | 19 | |
| With A Priori ISB (4 days) | East (%) | −1 | −1 | 1 | 16 | 20 |
| North (%) | 3 | 4 | 7 | 25 | 23 | |
| Up (%) | 4 | 4 | 7 | 20 | 17 | |
| 3D (%) | 3 | 4 | 6 | 20 | 17 | |
| With A Priori ISB (5 days) | East (%) | −4 | −4 | −2 | 14 | 17 |
| North (%) | 2 | 3 | 5 | 23 | 20 | |
| Up (%) | 3 | 4 | 5 | 17 | 13 | |
| 3D (%) | 3 | 3 | 4 | 18 | 14 | |
| With A Priori ISB (6 days) | East (%) | −6 | −7 | −7 | 10 | 14 |
| North (%) | 2 | 2 | 3 | 21 | 18 | |
| Up (%) | 4 | 3 | 3 | 14 | 9 | |
| 3D (%) | 3 | 3 | 2 | 14 | 10 | |
| With A Priori ISB (7 days) | East (%) | −7 | −9 | −8 | 8 | 12 |
| North (%) | 2 | 2 | 3 | 20 | 17 | |
| Up (%) | 4 | 3 | 2 | 12 | 6 | |
| 3D (%) | 3 | 3 | 2 | 13 | 7 | |
| Strategy | Items | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | ||
| Without A Priori ISB | Availability (%) | 100.0 | 100.0 | 100.0 | 97.9 | 64.0 |
| Num. of Sats. | 30.7 | 23.9 | 17.8 | 12.6 | 9.3 | |
| PDOP | 1.0 | 1.3 | 2.1 | 3.8 | 7.0 | |
| With A Priori ISB (1–7 days) | Availability (%) | 100.0 | 100.0 | 100.0 | 100.0 | 89.3–89.6 |
| Num. of Sats. | 30.7 | 23.9 | 17.8 | 12.5 | 8.4 | |
| PDOP | 1.0 | 1.3 | 2.1 | 3.8 | 8.2–8.3 | |
| Devices | DOY | Items | Statistics of Epochwise ISBs (ns) | |||
|---|---|---|---|---|---|---|
| GPS-GLONASS | GPS-Galileo | GPS-BDS-2 | GPS-BDS-3 | |||
| Xiaomi Mi8 (1) | 319 | Average | 30.285 | 0.064 | 35.957 | 39.839 |
| STD | 19.357 | 7.038 | 6.754 | 10.697 | ||
| 320 | Average | 23.642 | –0.747 | 32.568 | 36.107 | |
| STD | 17.949 | 5.994 | 6.670 | 7.897 | ||
| Xiaomi Mi8 (2) | 319 | Average | 27.329 | 0.390 | 30.590 | 35.523 |
| STD | 17.135 | 6.365 | 7.966 | 6.768 | ||
| 320 | Average | 25.239 | –0.967 | 29.155 | 36.337 | |
| STD | 18.599 | 7.896 | 7.039 | 12.185 | ||
| Devices | Strategy | Directions | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | |||
| Xiaomi Mi8 (1) | Without A Priori ISB | East (m) | 2.528 | 2.673 | 2.998 | 3.862 | 9.073 |
| North (m) | 2.632 | 2.879 | 3.236 | 3.883 | 8.850 | ||
| Up (m) | 6.044 | 8.064 | 10.264 | 12.650 | 25.571 | ||
| 3D (m) | 7.060 | 8.970 | 11.172 | 13.784 | 28.540 | ||
| With A Priori ISB (1 day) | East (m) | 2.437 | 2.586 | 2.886 | 3.454 | 5.237 | |
| North (m) | 2.348 | 2.455 | 2.650 | 2.903 | 4.908 | ||
| Up (m) | 5.018 | 6.892 | 9.399 | 11.971 | 23.724 | ||
| 3D (m) | 6.052 | 7.760 | 10.183 | 12.793 | 24.786 | ||
| Xiaomi Mi8 (2) | Without A Priori ISB | East (m) | 2.614 | 2.791 | 3.120 | 4.074 | 8.679 |
| North (m) | 2.790 | 2.961 | 3.104 | 3.799 | 6.423 | ||
| Up (m) | 6.866 | 8.328 | 10.369 | 14.994 | 28.309 | ||
| 3D (m) | 7.859 | 9.269 | 11.264 | 15.995 | 30.299 | ||
| With A Priori ISB (1 day) | East (m) | 2.477 | 2.645 | 2.855 | 3.579 | 5.763 | |
| North (m) | 2.499 | 2.565 | 2.599 | 3.019 | 3.925 | ||
| Up (m) | 5.858 | 7.237 | 9.403 | 13.721 | 24.587 | ||
| 3D (m) | 6.834 | 8.121 | 10.165 | 14.498 | 25.556 | ||
| Devices | Directions | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | ||
| Xiaomi Mi8 (1) | East (%) | 4 | 3 | 4 | 11 | 42 |
| North (%) | 11 | 15 | 18 | 25 | 45 | |
| Up (%) | 17 | 15 | 8 | 5 | 7 | |
| 3D (%) | 14 | 13 | 9 | 7 | 13 | |
| Xiaomi Mi8 (2) | East (%) | 5 | 5 | 8 | 12 | 34 |
| North (%) | 10 | 13 | 16 | 21 | 39 | |
| Up (%) | 15 | 13 | 9 | 8 | 13 | |
| 3D (%) | 13 | 12 | 10 | 9 | 16 | |
| Devices | Strategy | Items | Elevation Mask Angles | ||||
|---|---|---|---|---|---|---|---|
| 10° | 20° | 30° | 40° | 50° | |||
| Xiaomi Mi8 (1) | Without A Priori ISB | Availability (%) | 100.0 | 100.0 | 100.0 | 95.7 | 62.7 |
| Num. of Sats. | 20.0 | 17.8 | 14.8 | 11.8 | 8.7 | ||
| PDOP | 1.3 | 1.7 | 2.5 | 3.9 | 8.4 | ||
| With A Priori ISB (1 day) | Availability (%) | 100.0 | 100.0 | 100.0 | 100.0 | 82.9 | |
| Num. of Sats. | 20.0 | 17.8 | 14.8 | 11.5 | 8.2 | ||
| PDOP | 1.3 | 1.7 | 2.5 | 4.0 | 9.0 | ||
| Xiaomi Mi8 (2) | Without A Priori ISB | Availability (%) | 100.0 | 100.0 | 100.0 | 98.3 | 69.9 |
| Num. of Sats. | 22.4 | 20.1 | 16.6 | 13.0 | 9.5 | ||
| PDOP | 1.2 | 1.5 | 2.3 | 3.7 | 7.2 | ||
| With A Priori ISB (1 day) | Availability (%) | 100.0 | 100.0 | 100.0 | 100.0 | 93.0 | |
| Num. of Sats. | 22.4 | 20.1 | 16.6 | 12.9 | 8.8 | ||
| PDOP | 1.2 | 1.5 | 2.3 | 3.7 | 7.4 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, L.; Zhang, Z.; Yu, W.; Dai, W. Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints. Remote Sens. 2021, 13, 4650. https://doi.org/10.3390/rs13224650
Pan L, Zhang Z, Yu W, Dai W. Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints. Remote Sensing. 2021; 13(22):4650. https://doi.org/10.3390/rs13224650
Chicago/Turabian StylePan, Lin, Zhehao Zhang, Wenkun Yu, and Wujiao Dai. 2021. "Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints" Remote Sensing 13, no. 22: 4650. https://doi.org/10.3390/rs13224650
APA StylePan, L., Zhang, Z., Yu, W., & Dai, W. (2021). Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints. Remote Sensing, 13(22), 4650. https://doi.org/10.3390/rs13224650