
Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality


Abstract
1. Introduction
2. Materials and Methods
2.1. Equipment Setup
2.2. Data Collection and Site Description
2.2.1. In Situ Data Collection Method
- Water-leaving radiance calculation:
- Downwelling incident irradiance calculation:
- Remote sensing reflectance calculation:
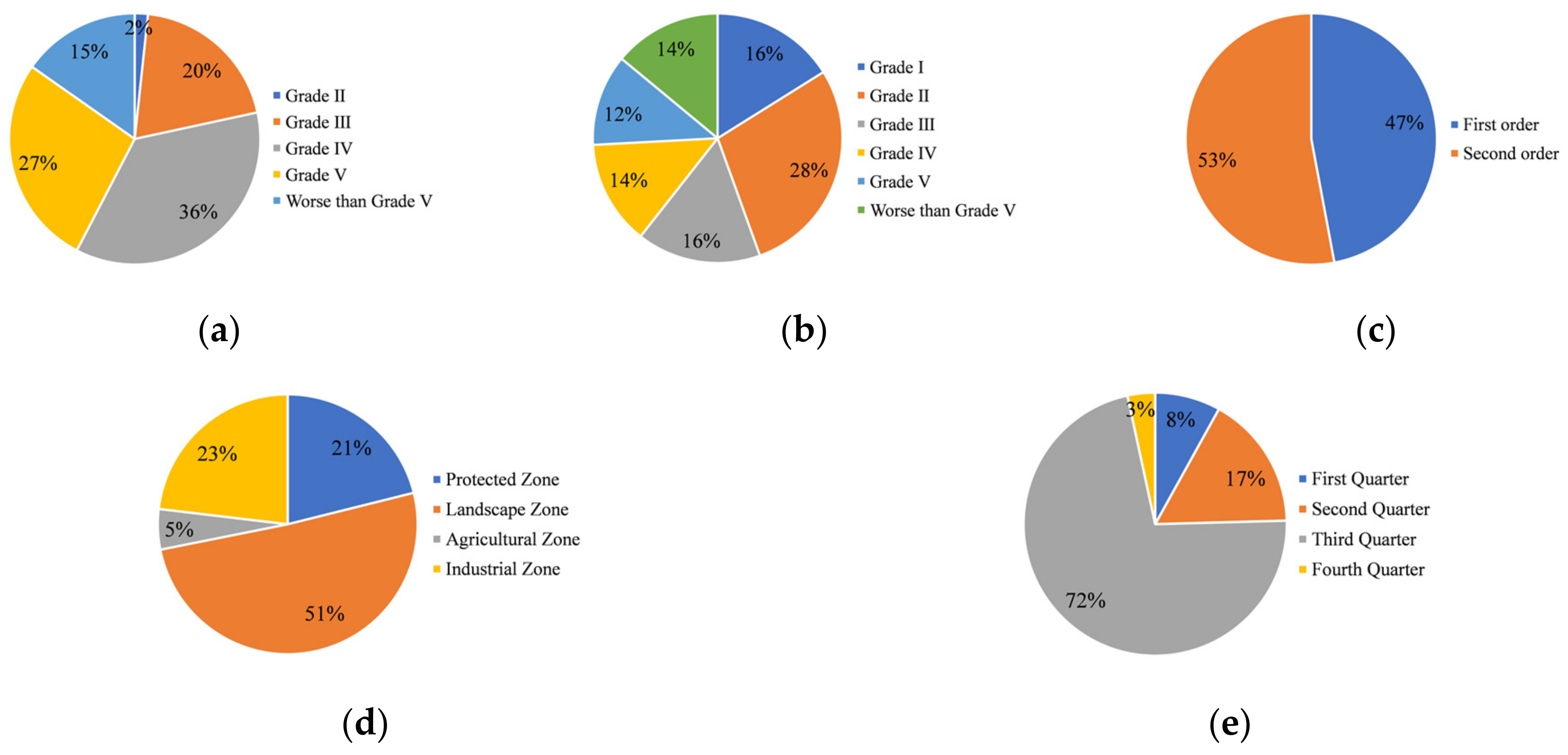
2.2.2. Composition of the Dataset
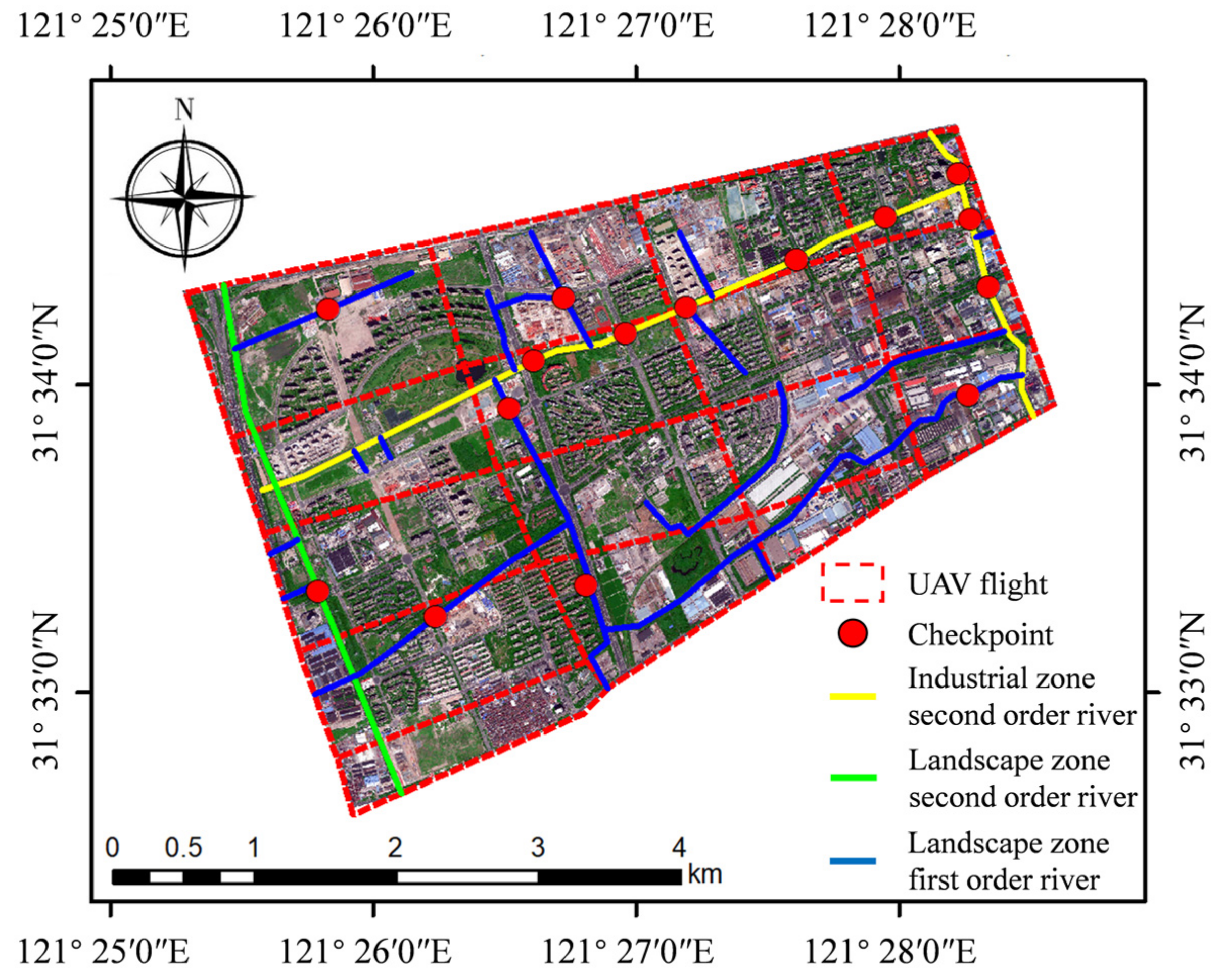
2.2.3. UAV-Borne Multispectral Water Quality Remote Sensing Application Process
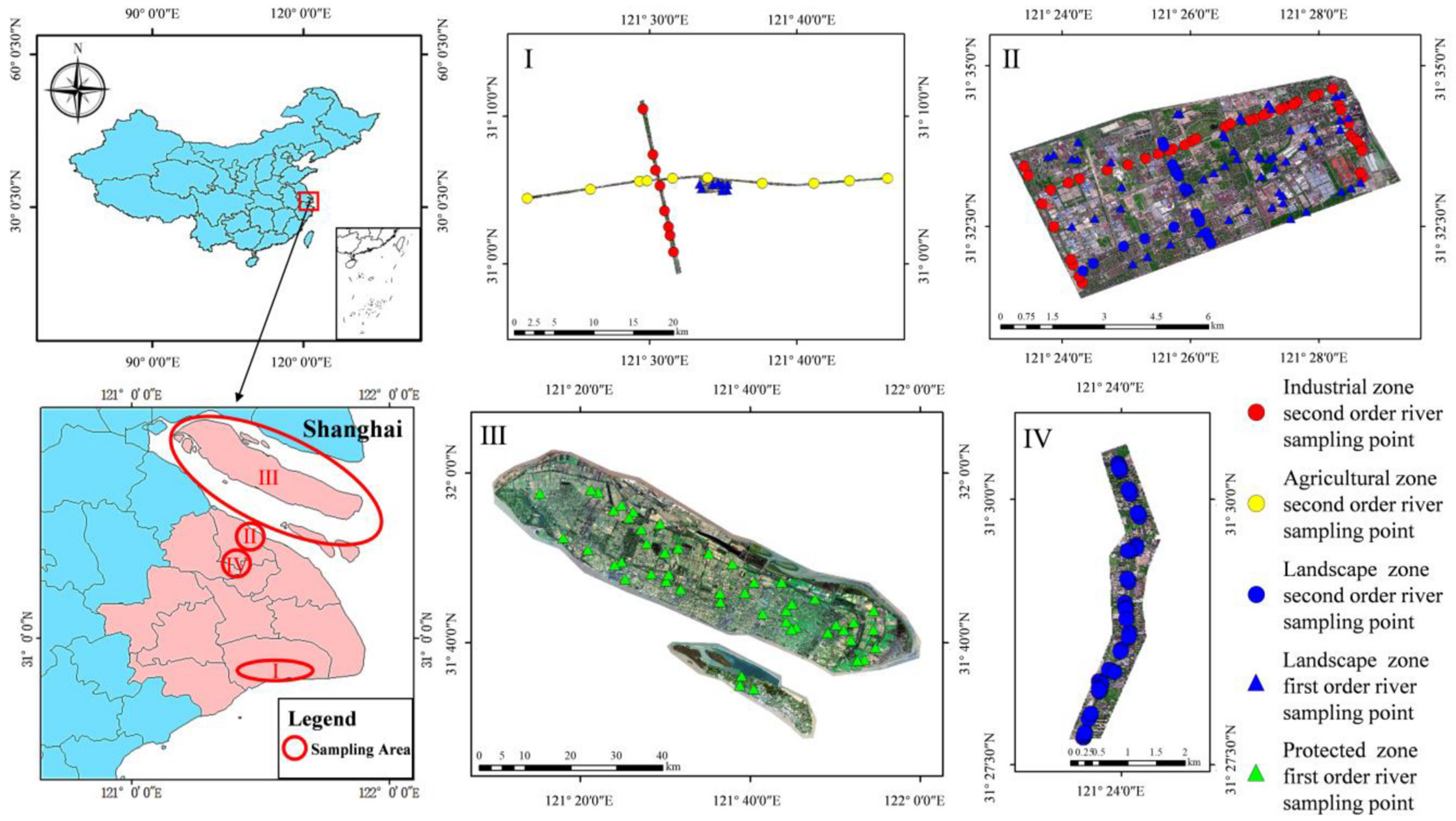
2.2.4. Study Site
2.3. Feature Analysis for Urban River Water Quality Remote Sensing
2.3.1. Spectral Features Analysis
2.3.2. Spatial Features Analysis
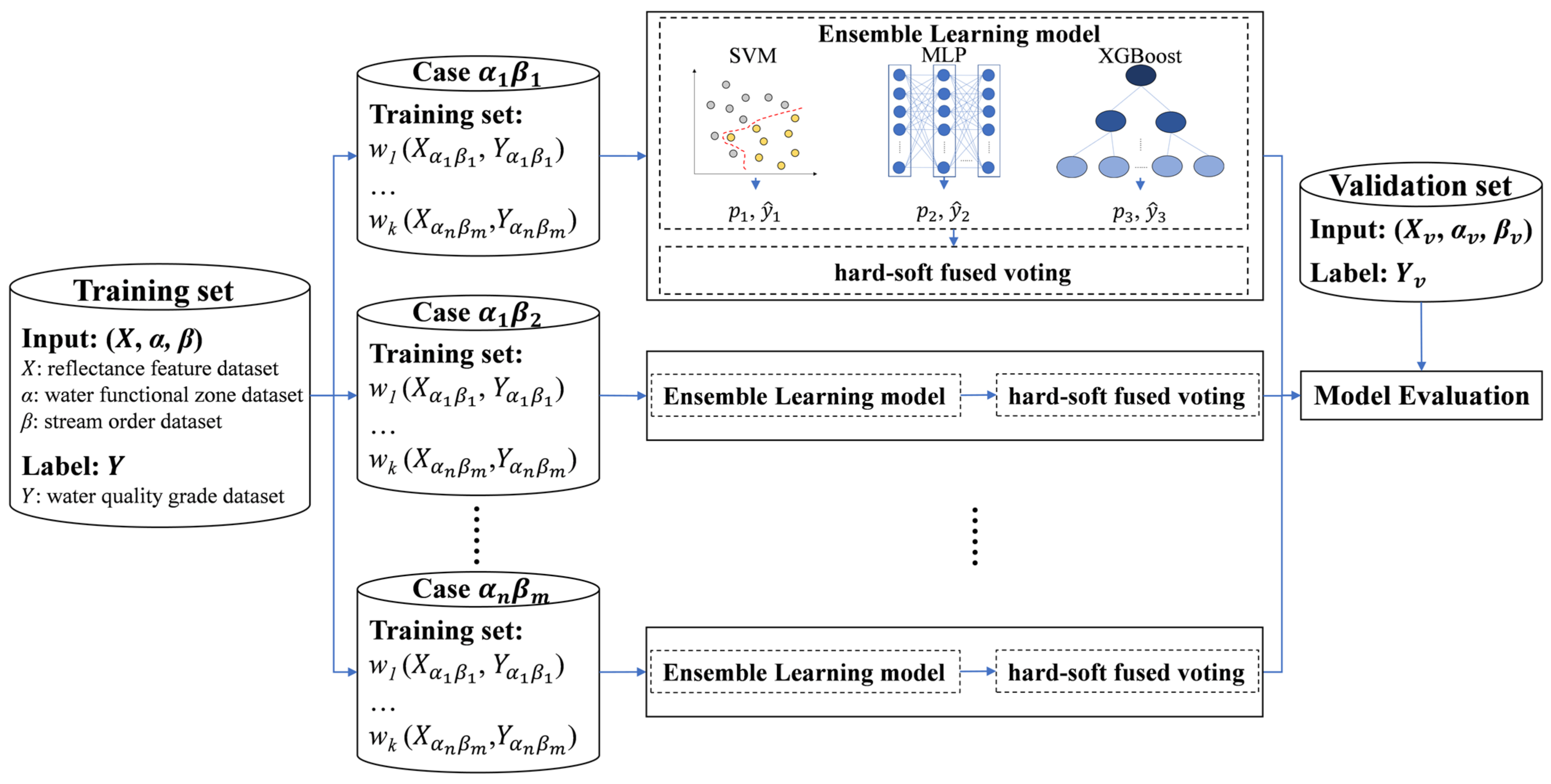
2.4. Spectral- and Spatial-Feature-Integrated Ensemble Learning
2.4.1. Ensemble Learning Model
2.4.2. Model Evaluation
3. Results
3.1. Feature Analysis Results for Urban River Water Quality Remote Sensing
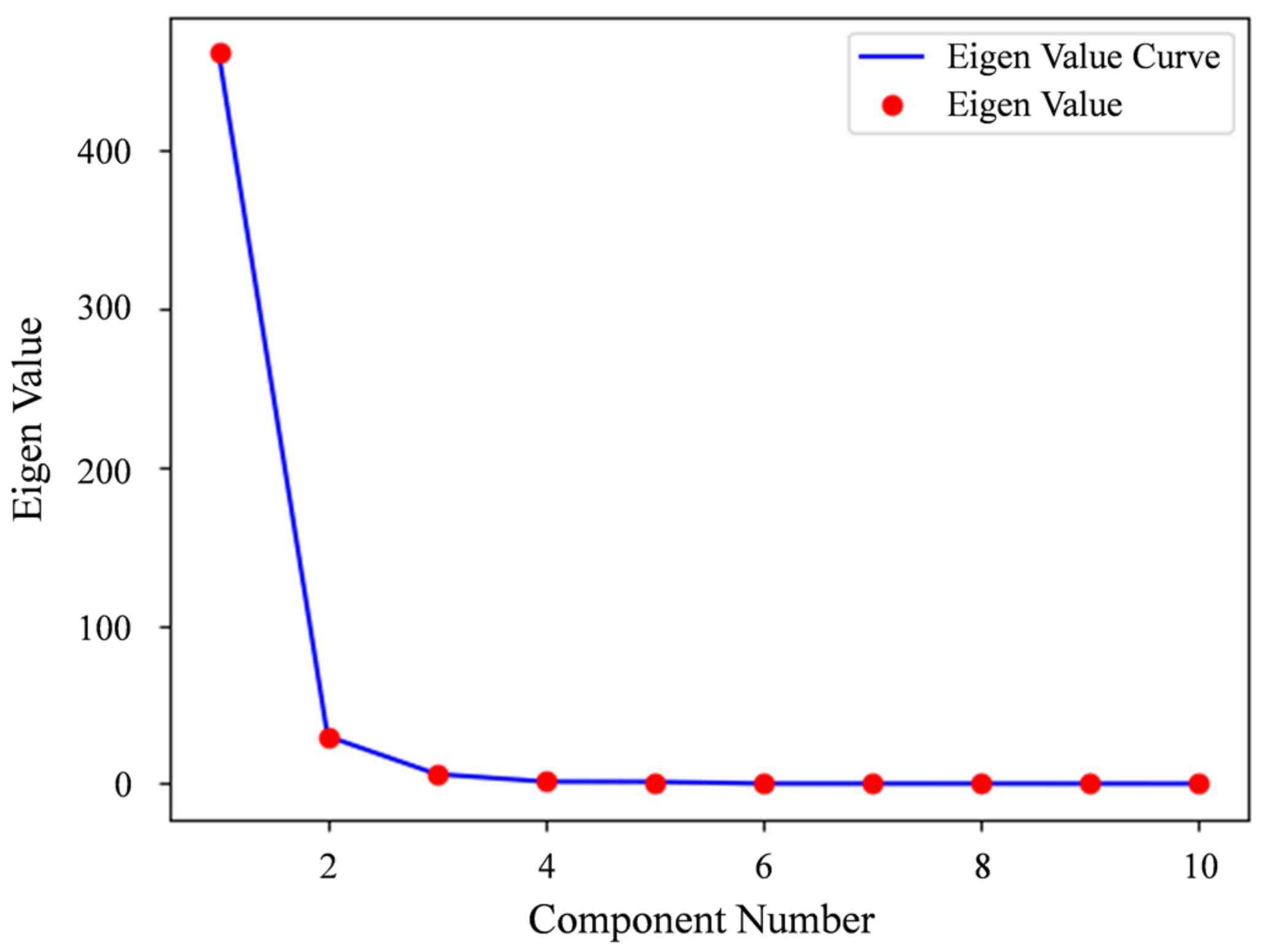
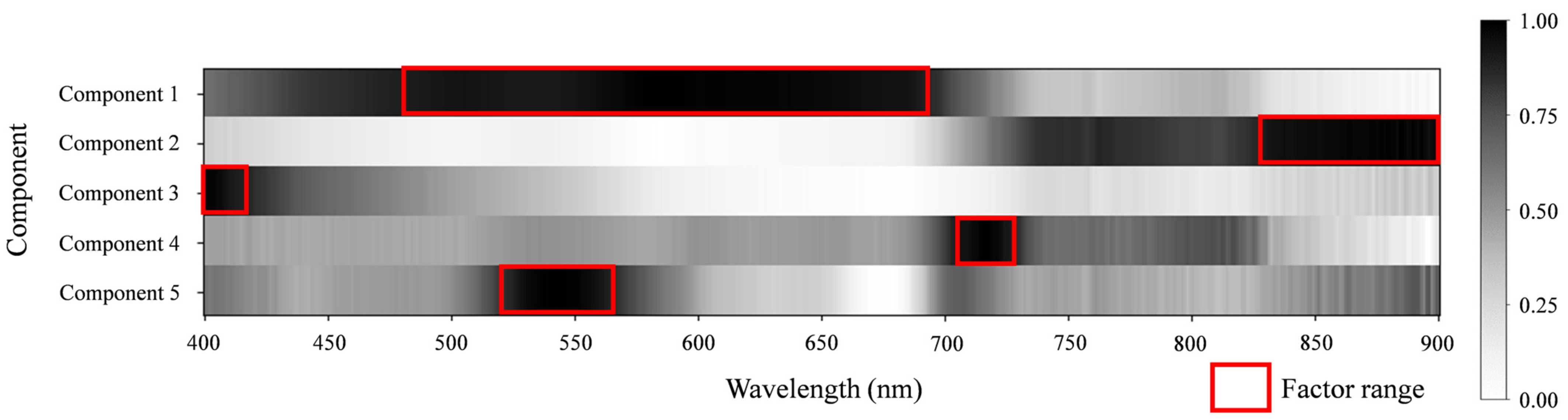
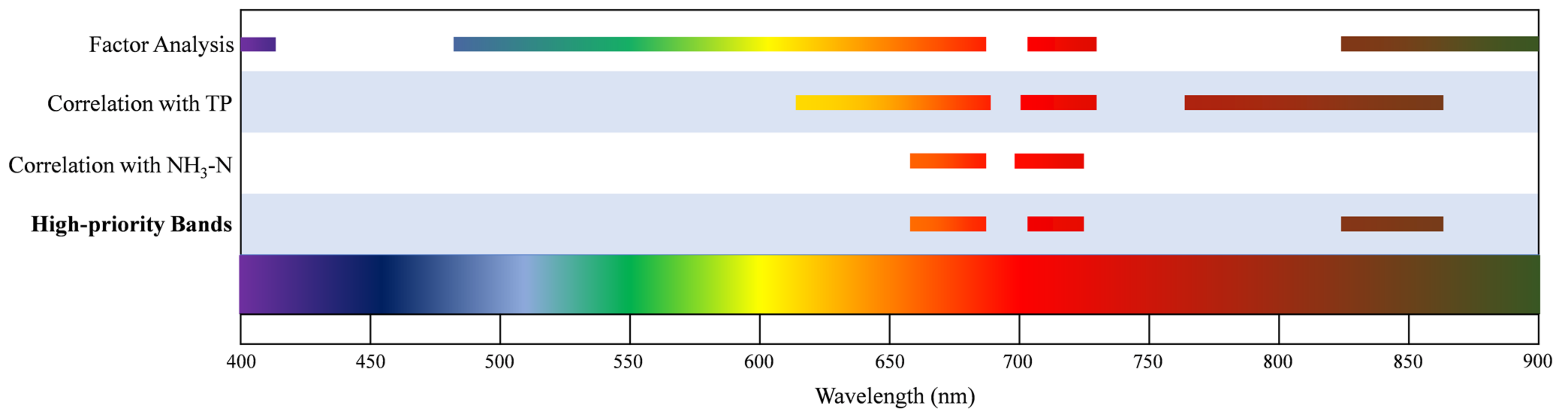
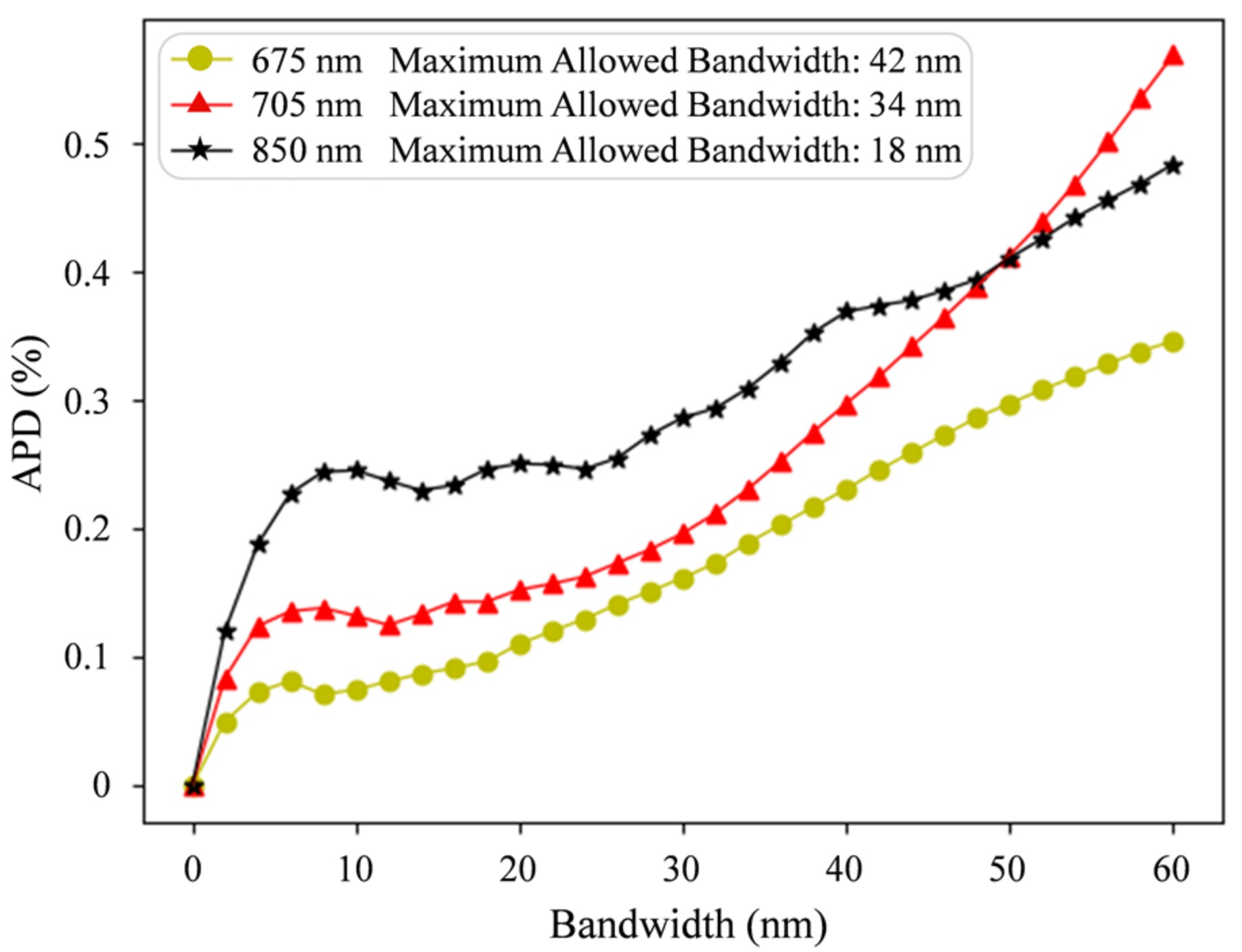
3.1.1. Spectral Feature Analysis
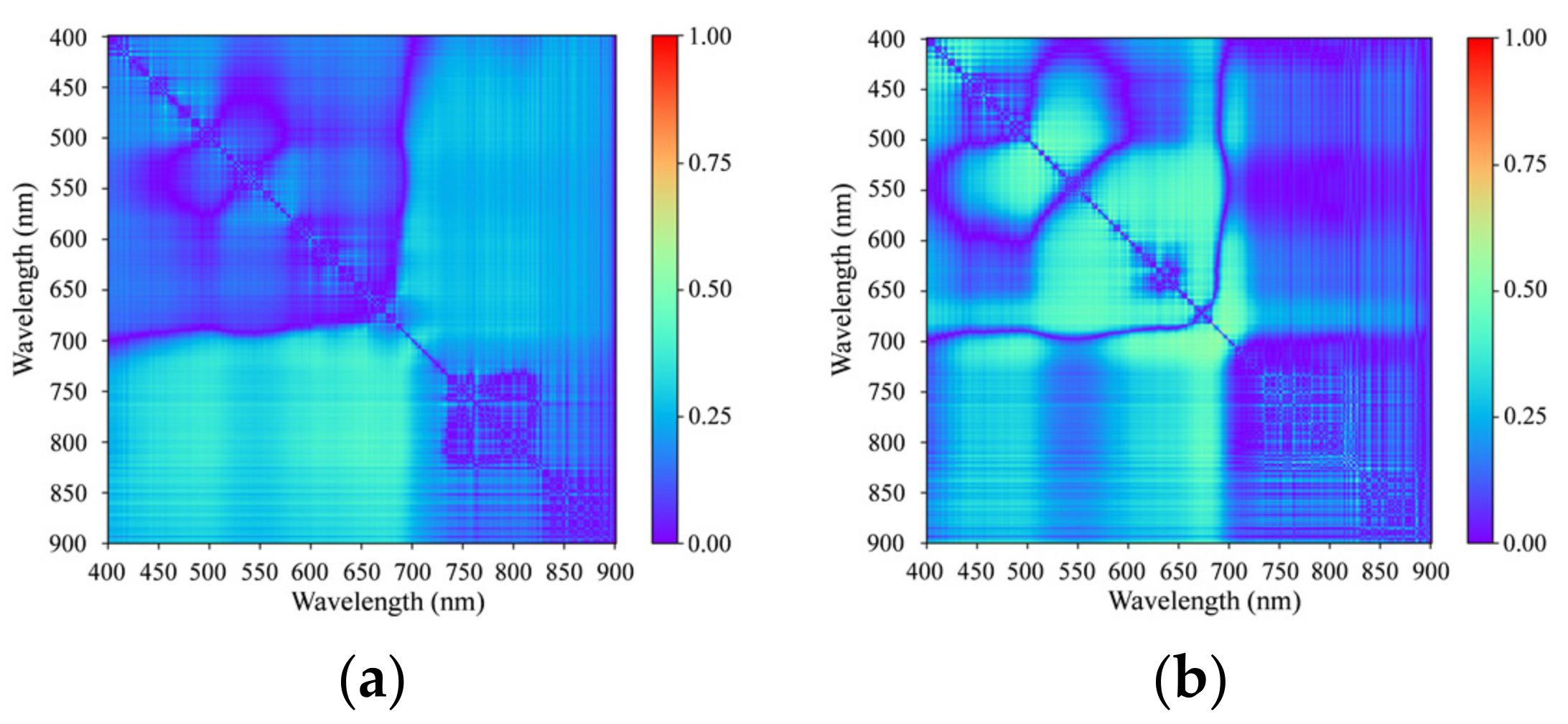
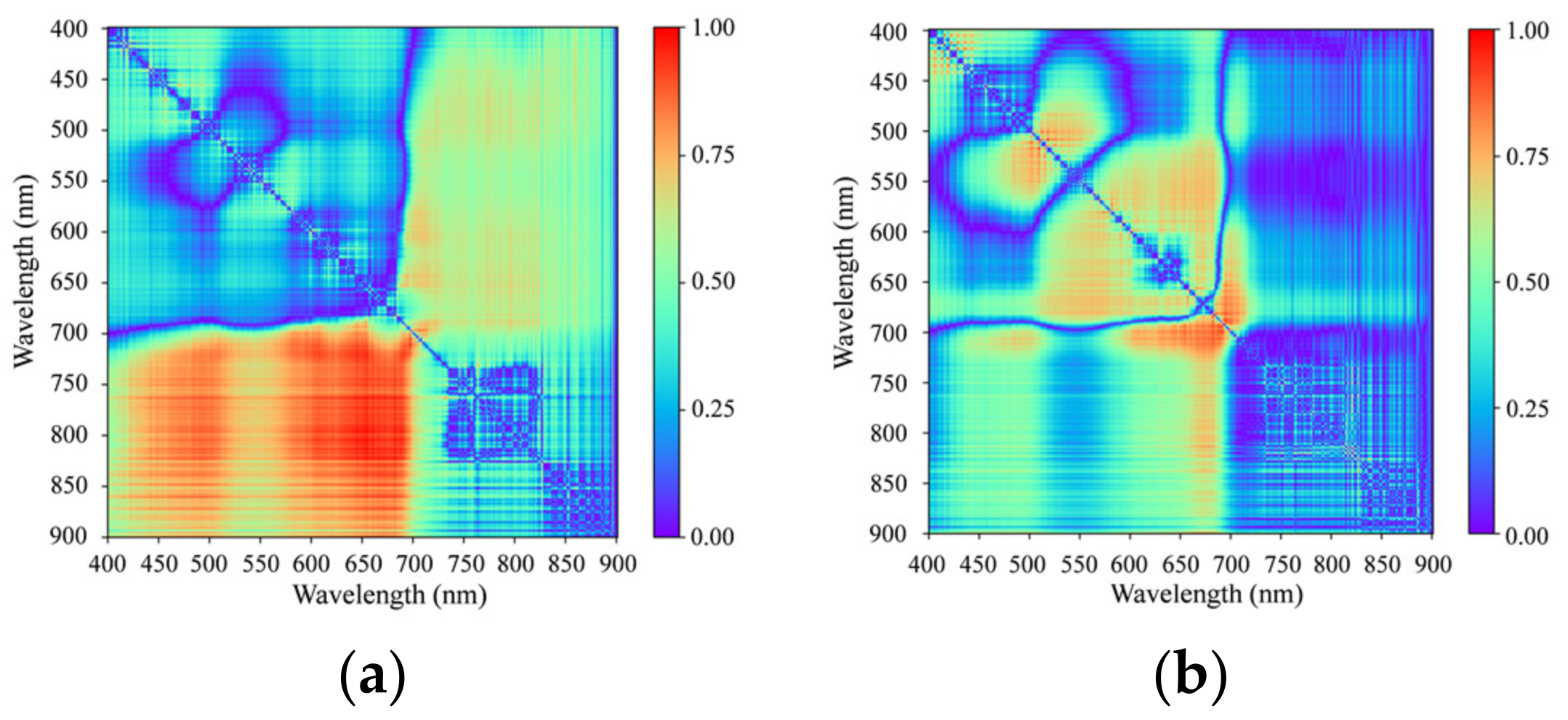
3.1.2. Spatial Feature Analysis
3.2. Modeling Results
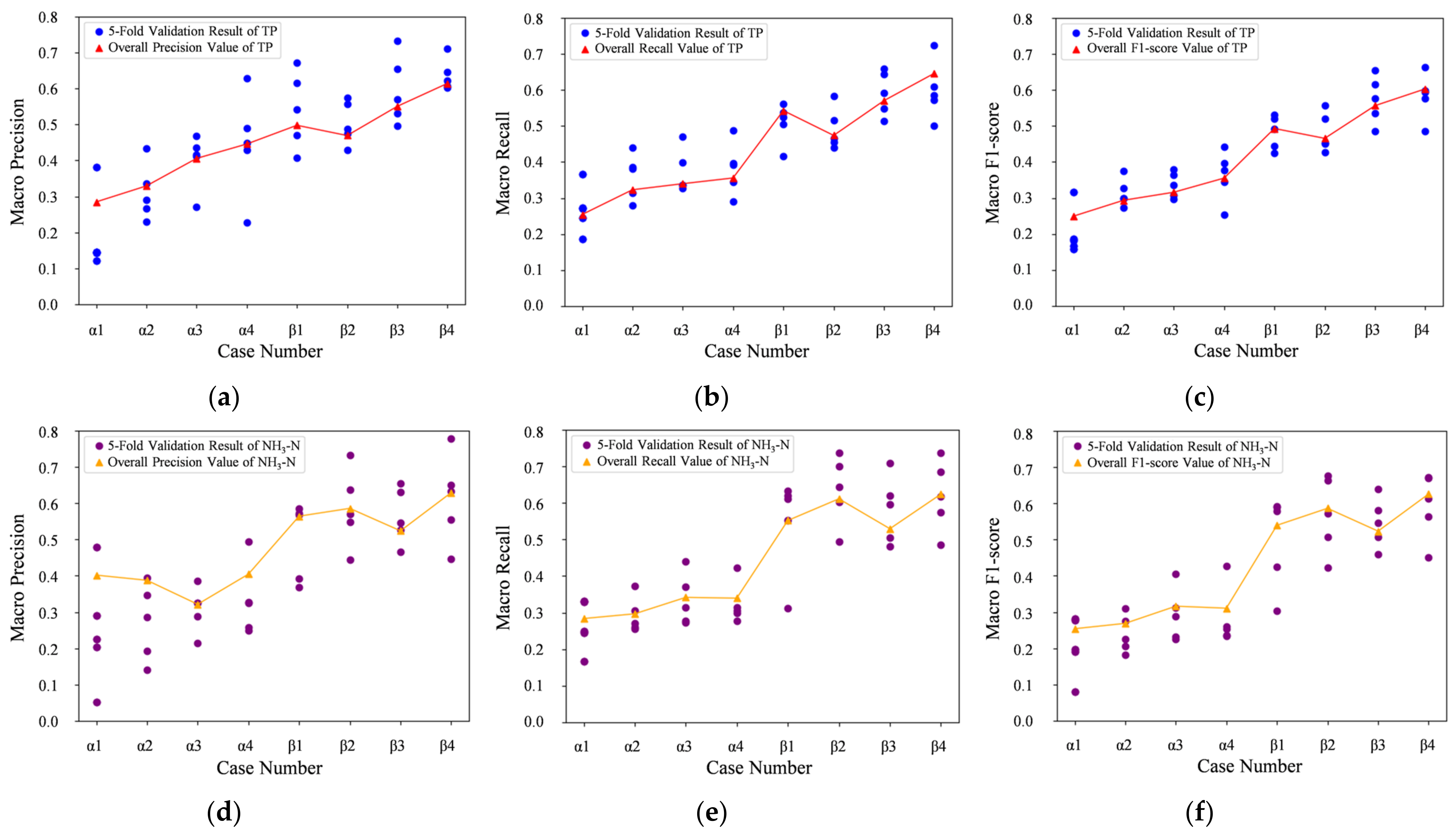
3.2.1. Results of Models Using Spectral Features
3.2.2. Results of Models Using Spectral and Spatial Features
3.3. Application Experiment Results
3.3.1. Image Data Preprocessing
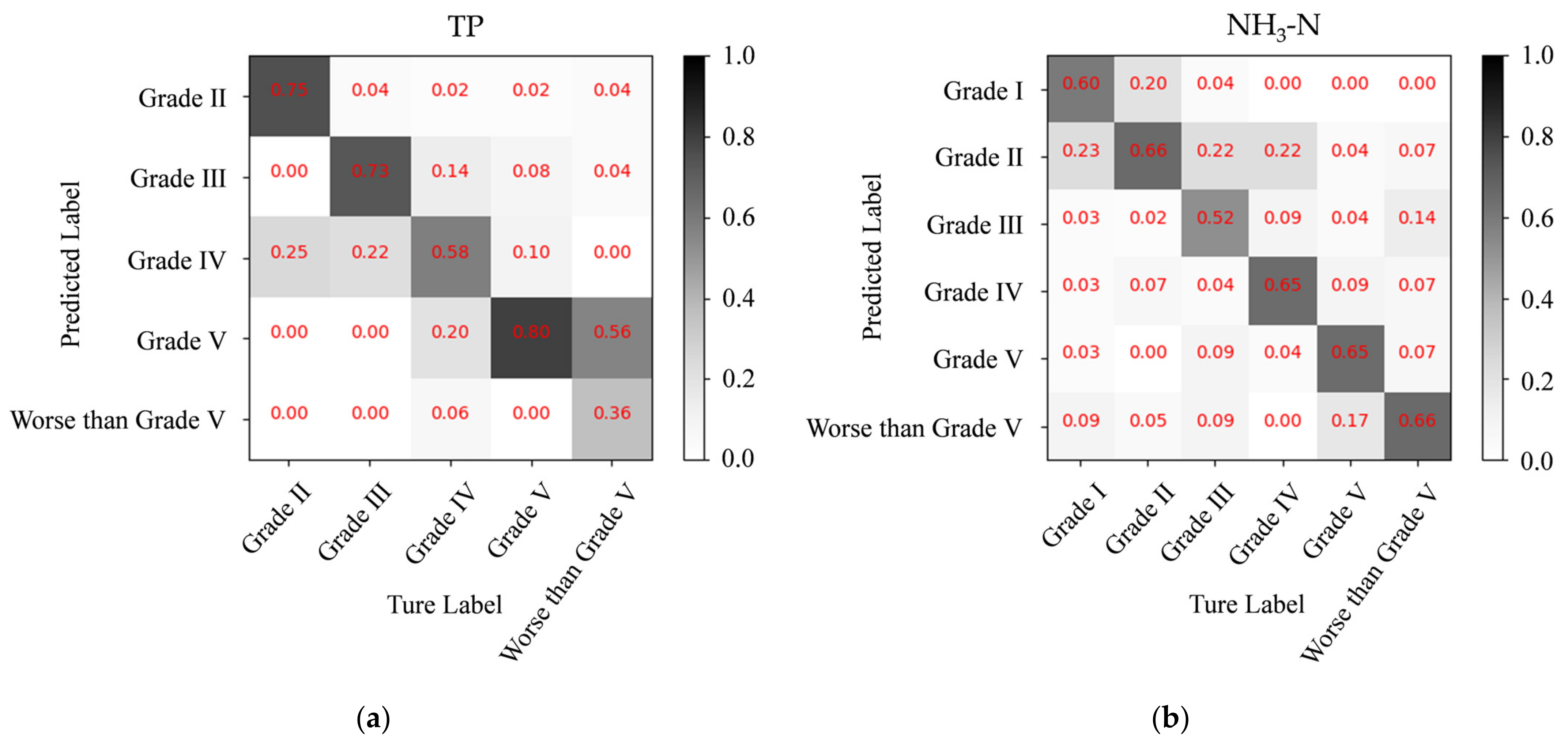
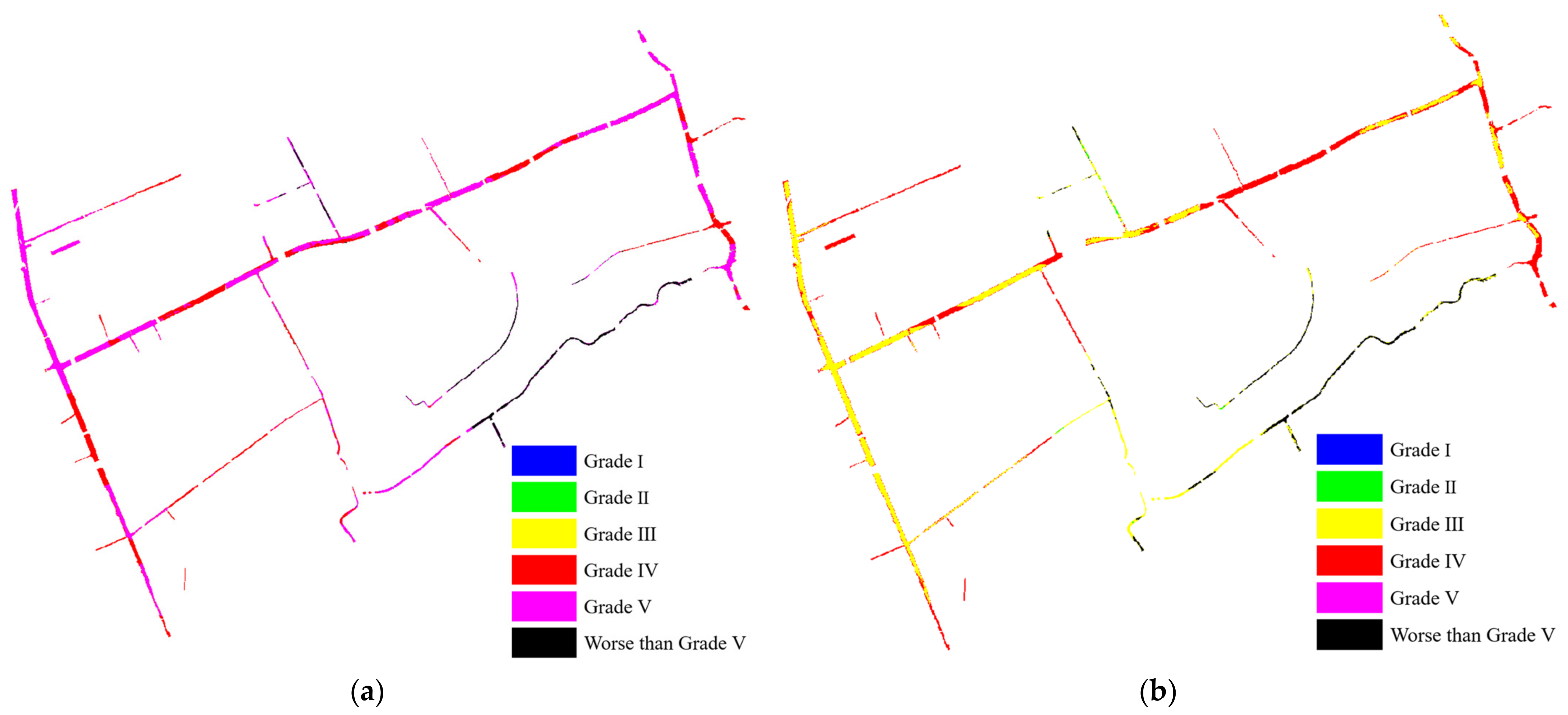
3.3.2. Water Quality Grading Results
4. Discussion
4.1. Dataset Construction
4.2. Feature Analysis
4.3. Water Quality Grading Model
4.4. Application Process
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Symbol | Unit |
|---|---|---|
| Water-leaving radiance | μW/(cm2·nm·sr) | |
| Sky radiance | μW/(cm2·nm·sr) | |
| Total radiance signal received by the spectrometer above the water surface | μW/(cm2·nm·sr) | |
| Downwelling incident irradiance | μW/(cm2·nm) | |
| Downward radiance measured with a standard reference panel | μW/(cm2·nm·sr) | |
| Remote sensing reflectance | Sr−1 |
References
- Wang, Y.; Xian, C.; Jiang, Y.; Pan, X.; Ouyang, Z. Anthropogenic reactive nitrogen releases and gray water footprints in urban water pollution evaluation: The case of Shenzhen City, China. Environ. Dev. Sustain. 2019, 22, 6343–6361. [Google Scholar] [CrossRef]
- Ye, Q. Quality evaluation of ecological restoration of urban water pollution based on analytic hierarchy process. J. Coastal Res. 2020, 104, 10–13. [Google Scholar] [CrossRef]
- Huang, B.C.; He, C.S.; Fan, N.S.; Jin, R.C.; Yu, H. Envisaging wastewater-to-energy practices for sustainable urban water pollution control: Current achievements and future prospects. Renew. Sustain. Energy Rev. 2020, 134, 110134. [Google Scholar] [CrossRef]
- Qu, M.; Lefebvre, D.D.; Wang, Y.; Qu, Y.; Zhu, D.; Ren, W. Algal blooms: Proactive strategy. Science 2014, 346, 175–176. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Jin, X.; Liu, D.; Lang, C.; Shan, B. Temporal and spatial variation of nitrogen and phosphorus and eutrophication assessment for a typical arid river—Fuyang River in northern China. J. Environ. Sci. 2017, 55, 41–48. [Google Scholar] [CrossRef]
- Gobler, C.; Burkholder, J.; Davis, T.; Harke, M.J.; Johengen, T.; Stow, C.; Waal, D.B.V.d. The dual role of nitrogen supply in controlling the growth and toxicity of cyanobacterial blooms. Harmful Algae 2016, 54, 87–97. [Google Scholar] [PubMed]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. Novel spectra-derived features for empirical retrieval of water quality parameters: Demonstrations for OLI, MSI, and OLCI sensors. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10285–10300. [Google Scholar] [CrossRef]
- Wang, X.; Yang, W. Water quality monitoring and evaluation using remote sensing techniques in China: A systematic review. Ecosyst. Health Sustain. 2019, 5, 47–56. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring inland water quality using remote sensing: Potential and limitations of spectral indices, bio-optical simulations, machine learning, and cloud computing. Earth-Sci. Rev. 2020, 205. [Google Scholar] [CrossRef]
- Song, K.; Liu, G.; Wang, Q.; Wen, Z.; Lyu, L.; Du, Y.; Sha, L.; Fang, C. Quantification of lake clarity in China using Landsat OLI imagery data. Remote Sens. Environ. 2020, 243, 111800. [Google Scholar]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [PubMed]
- Spyrakos, E.; O’Donnell, R.; Hunter, P.D.; Miller, C.; Scott, M.; Simis, S.G.H.; Neil, C.; Barbosa, C.C.F.; Binding, C.E.; Bradt, S.; et al. Optical types of inland and coastal waters. Limnol. Oceanogr. 2018, 63, 846–870. [Google Scholar] [CrossRef]
- Long, Y.; Rivard, B.; Rogge, D.; Tian, M. Hyperspectral band selection using the N-dimensional Spectral Solid Angle method for the improved discrimination of spectrally similar targets. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 35–47. [Google Scholar]
- Wang, Q.; Zhang, F.; Li, X. Optimal clustering framework for hyperspectral band selection. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5910–5922. [Google Scholar] [CrossRef]
- Jia, S.; Tang, G.; Zhu, J.; Li, Q. A novel ranking-based clustering approach for hyperspectral band selection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 88–102. [Google Scholar] [CrossRef]
- Yan, F.; Wang, S.; Zhou, Y.; Zhao, Q.; Zhou, W.; Zhu, L.; Du, X.; Chen, S.; Wang, L.; Zhang, P. Correlation analysis of spectral reflectance in determining preliminary algorithms for water quality monitoring in Taihu Lake, China. In Proceedings of the IGARSS 2004, IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 7, pp. 4889–4892. [Google Scholar]
- Lee, Z.; Weidemann, A.; Arnone, R. Combined effect of reduced band number and increased bandwidth on shallow water remote sensing: The case of WorldView 2. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2577–2586. [Google Scholar] [CrossRef]
- Cao, Z.; Ma, R.; Duan, H.; Xue, K. Effects of broad bandwidth on the remote sensing of inland waters: Implications for high spatial resolution satellite data applications. ISPRS J. Photogramm. Remote Sens. 2019, 153, 110–122. [Google Scholar] [CrossRef]
- Liu, C.; Zeng, D.; Wu, H.; Wang, Y.; Jia, S.; Xin, L. Urban land cover classification of high-resolution aerial imagery using a relation-enhanced multiscale convolutional network. Remote Sens. 2020, 12, 311. [Google Scholar] [CrossRef]
- He, X.; Li, P. Surface water pollution in the middle chinese loess plateau with special focus on hexavalent chromium (Cr6+): Occurrence, sources and health risks. Expo. Health 2020, 12, 385–401. [Google Scholar] [CrossRef]
- Ping, G.; Ya-Shan, S.; Chao, Y. Water function zoning and water environment capacity analysis on surface water in Jiamusi urban area. Procedia Eng. 2012, 28, 458–463. [Google Scholar] [CrossRef]
- Rong, W.; Tian-Yin, H.; Wei, W. Different factors on nitrogen and phosphorus self-purification ability from an urban Guandu-Huayuan river. J. Lake Sci. 2016, 28, 105–113. [Google Scholar] [CrossRef][Green Version]
- Zhou, H.; Chen, X.; Ying, T.; Xuan, Y.; Wangjin, Y.; Liu, X. Variations and behavior of wastewater-marking pharmaceuticals influenced under hydrodynamic conditions in urban river systems. Int. J. Environ. Sci. Technol. 2018, 16, 5669–5684. [Google Scholar] [CrossRef]
- Wu, C.; Wu, J.; Qi, J.; Zhang, L.; Huang, H.; Lou, L.; Chen, Y. Empirical estimation of total phosphorus concentration in the mainstream of the Qiantang River in China using Landsat TM data. Int. J. Remote Sens. 2010, 31, 2309–2324. [Google Scholar] [CrossRef]
- Du, C.; Wang, Q.; Li, Y.; Lyu, H.; Zhu, L.; Zheng, Z.; Wen, S.; Liu, G.; Guo, Y. Estimation of total phosphorus concentration using a water classification method in inland water. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 29–42. [Google Scholar] [CrossRef]
- Ogashawara, I.; Li, L. Removal of Chlorophyll-a Spectral Interference for Improved Phycocyanin Estimation from Remote Sensing Reflectance. Remote Sens. 2019, 11, 1764. [Google Scholar] [CrossRef]
- Liu, G.; Li, S.; Song, K.; Wang, X.; Wen, Z.; Kutser, T.; Jacinthe, P.-A.; Shang, Y.; Lyu, L.; Fang, C.; et al. Remote sensing of CDOM and DOC in alpine lakes across the Qinghai-Tibet Plateau using Sentinel-2A imagery data. J. Environ. Manag. 2021, 286, 112231. [Google Scholar] [CrossRef]
- Giardino, C.; Candiani, G.; Bresciani, M.; Lee, Z.; Gagliano, S.; Pepe, M. BOMBER: A tool for estimating water quality and bottom properties from remote sensing images. Comput. Geosci. 2012, 45, 313–318. [Google Scholar] [CrossRef]
- Albert, A.; Gege, P. Inversion of irradiance and remote sensing reflectance in shallow water between 400 and 800 nm for calculations of water and bottom properties. Appl. Opt. 2006, 45, 2331–2343. [Google Scholar] [CrossRef]
- Chang, N.; Imen, S.; Vannah, B. Remote sensing for monitoring surface water quality status and ecosystem state in relation to the nutrient cycle: A 40-year perspective. Crit. Rev. Environ. Sci. Technol. 2015, 45, 101–166. [Google Scholar] [CrossRef]
- Kutser, T.; Herlevi, A.; Kallio, K.; Arst, H. A hyperspectral model for interpretation of passive optical remote sensing data from turbid lakes. Sci. Total Environ. 2001, 268, 47–58. [Google Scholar] [CrossRef]
- Wang, P.; Boss, E.; Roesler, C. Uncertainties of inherent optical properties obtained from semianalytical inversions of ocean color. Appl. Opt. 2005, 44, 4074–4085. [Google Scholar] [CrossRef] [PubMed]
- Tung, T.M.; Yaseen, Z.M. A survey on river water quality modelling using artificial intelligence models: 2000–2020. J. Hydrol. 2020, 585, 124670. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, F.; Ding, J. Evaluation of water quality based on a machine learning algorithm and water quality index for the Ebinur Lake Watershed, China. Sci. Rep. 2017, 7, 12858. [Google Scholar] [CrossRef]
- Maier, P.; Keller, S. Machine Learning Regression on Hyperspectral Data to Estimate Multiple Water Parameters. In Proceedings of the 2018 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 23–26 September 2018; pp. 1–5. [Google Scholar]
- Wang, X.; Ma, L. Apply semi-supervised support vector regression for remote sensing water quality retrieving. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2757–2760. [Google Scholar]
- Zhang, Y.; Wu, L.; Ren, H.; Liu, Y.; Zheng, Y.; Liu, Y.; Dong, J. Mapping water quality parameters in urban rivers from hyperspectral images using a new self-adapting selection of multiple artificial neural networks. Remote Sens. 2020, 12, 336. [Google Scholar] [CrossRef]
- Peterson, K.; Sagan, V.; Sidike, P.; Cox, A.L.; Martinez, M. Suspended Sediment Concentration Estimation from Landsat Imagery along the Lower Missouri and Middle Mississippi Rivers Using an Extreme Learning Machine. Remote Sens. 2018, 10, 1503. [Google Scholar] [CrossRef]
- Peterson, K.; Sagan, V.; Sloan, J. Deep learning-based water quality estimation and anomaly detection using Landsat-8/Sentinel-2 virtual constellation and cloud computing. GIScience Remote Sens. 2020, 57, 510–525. [Google Scholar]
- Dong, X.; Yu, Z.; Cao, W.; Shi, Y.; Ma, Q. A survey on ensemble learning. Front. Comput. Sci. 2019, 14, 241–258. [Google Scholar] [CrossRef]
- Peterson, K.T.; Sagan, V.; Sidike, P.; Hasenmueller, E.A.; Sloan, J.J.; Knouft, J.H. Machine learning-based ensemble prediction of water-quality variables using feature-level and decision-level fusion with proximal remote sensing. Photogramm. Eng. Remote Sens. 2019, 85, 269–280. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Liu, C.; Zhou, X.; Zhou, Y.; Akbar, A. Multi-temporal monitoring of urban river water quality using UAV-Borne multi-spectral remote sensing. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, XLIII-B3-2020, 1469–1475. [Google Scholar] [CrossRef]
- McEliece, R.; Hinz, S.; Guarini, J.M.; Coston-Guarini, J. Evaluation of nearshore and offshore water quality assessment using UAV multispectral imagery. Remote Sens. 2020, 12, 2258. [Google Scholar] [CrossRef]
- Su, T.-C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Wang, Z.; Wang, Z.; Zhou, X.; Cao, L. Monitoring of urban black-odor water based on nemerow index and gradient boosting decision tree regression using UAV-Borne hyperspectral imagery. Remote Sens. 2019, 11, 2402. [Google Scholar] [CrossRef]
- Ouillon, S.; Petrenko, A. Above-water measurements of reflectance and chlorophyll-a algorithms in the Gulf of Lions, NW Mediterranean Sea. Opt. Express 2005, 13, 2531–2548. [Google Scholar] [CrossRef] [PubMed]
- Mueller, J.L.; Fargion, G.; McClain, C.; Mueller, J.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Mobley, C.; McLean, S.; et al. Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4. Volume III: Radiometric Measurements and Data Analysis Protocols; National Aeronautical and Space Administration: Greenbelt, MD, USA, 2003. [Google Scholar]
- The Ministry of Environmental Protection of the People’s Republic of China. Environmental Quality Standards for Surface Water (GB 3838–2002); The Ministry of Environmental Protection of the People’s Republic of China: Beijing, China, 2002. [Google Scholar]
- Shanghai Water Authority. Functional Zoning of Water Environment in Shanghai; Shanghai Water Authority: Shanghai, China, 2004. [Google Scholar]
- Scheidegger, A.E. Horton’s law of stream numbers. Water Resour. Res. 1968, 4, 655–658. [Google Scholar] [CrossRef]
- Ma, X.; Wang, L.; Yang, H.; Li, N.; Gong, C. Spatiotemporal Analysis of Water Quality Using Multivariate Statistical Techniques and the Water Quality Identification Index for the Qinhuai River Basin, East China. Water 2020, 12, 2764. [Google Scholar] [CrossRef]
- Wang, J.; Fu, Z.; Qiao, H.; Liu, F. Assessment of eutrophication and water quality in the estuarine area of Lake Wuli, Lake Taihu, China. Sci. Total Environ. 2019, 650 Pt 1, 1392–1402. [Google Scholar] [CrossRef] [PubMed]
- Wang, M. Effects of ocean surface reflectance variation with solar elevation on normalized water-leaving radiance. Appl. Opt. 2006, 45, 4122–4128. [Google Scholar] [CrossRef]
- Schramm, S.; Rangel, J.; Salazar, D.A.; Schmoll, R.; Kroll, A. Target analysis for the multispectral geometric calibration of cameras in visual and infrared spectral range. IEEE Sens. J. 2021, 21, 2159–2168. [Google Scholar] [CrossRef]
- Oniga, V.E.; Pfeifer, N.; Loghin, A.M. 3D calibration test-field for digital cameras mounted on unmanned aerial systems (UAS). Remote Sens. 2018, 10, 2017. [Google Scholar] [CrossRef]
- Jiang, Y.H.; Zhang, G.; Tang, X.; Li, D.; Huang, W.; Pan, H.B. Geometric calibration and accuracy assessment of ZiYuan-3 multispectral images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4161–4172. [Google Scholar] [CrossRef]
- Cao, S.; Danielson, B.; Clare, S.; Koenig, S.; Campos-Vargas, C.; Sanchez-Azofeifa, A. Radiometric calibration assessments for UAS-borne multispectral cameras: Laboratory and field protocols. ISPRS J. Photogramm. Remote Sens. 2019, 149, 132–145. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor correction of a 6-band multispectral imaging sensor for UAV remote sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Dinguirard, M.; Slater, P.N. Calibration of space-multispectral imaging sensors. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Sekrecka, A.; Wierzbicki, D.; Kedzierski, M. Influence of the sun position and platform orientation on the quality of imagery obtained from unmanned aerial vehicles. Remote Sens. 2020, 12, 1040. [Google Scholar] [CrossRef]
- Minařík, R.; Langhammer, J.; Hanuš, J. Radiometric and atmospheric corrections of multispectral μMCA camera for UAV spectroscopy. Remote Sens. 2019, 11, 2428. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious radiometric calibration of a multispectral camera on board an unmanned aerial system. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef]
- Woods, C.M.; Edwards, M.C. 12 factor analysis and related methods. In Epidemiology and Medical Statistics; Rao, C.R., Miller, J.P., Rao, D.C., Eds.; Handbook of Statistics; Elsevier: Amsterdam, The Netherlands, 2007; pp. 367–394. [Google Scholar]
- Koo, T.K.; Li, M.Y. A guideline of selecting and reporting intraclass correlation coefficients for reliability research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef]
- Akaho, S. A kernel method for canonical correlation analysis. arXiv 2006, arXiv:cs/0609071. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Cheng, S.; Zhang, S.; Li, L.; Zhang, D. Water quality monitoring method based on TLD 3D fish tracking and XGBoost. Math. Probl. Eng. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Leitner, F.; Mardis, S.A.; Krallinger, M.; Cesareni, G.; Hirschman, L.; Valencia, A. An Overview of BioCreative II.5. IEEE/ACM Trans. Comput. Biol. Bioinform. 2010, 7, 385–399. [Google Scholar] [CrossRef]
- Wang, X.; Chen, S.; Su, J. Real Network Traffic Collection and Deep Learning for Mobile App Identification. Wirel. Commun. Mob. Comput. 2020, 2020, 4707909:4707901–4707909:4707914. [Google Scholar] [CrossRef]
- Morgan, B.J.; Stocker, M.D.; Valdes-Abellan, J.; Kim, M.S.; Pachepsky, Y. Drone-based imaging to assess the microbial water quality in an irrigation pond: A pilot study. Sci. Total Environ. 2020, 716, 135757. [Google Scholar] [CrossRef]
- Keith, D.J.; Schaeffer, B.A.; Lunetta, R.S.; Gould, R.W.; Rocha, K.; Cobb, D.J. Remote sensing of selected water-quality indicators with the hyperspectral imager for the coastal ocean (HICO) sensor. Int. J. Remote Sens. 2014, 35, 2927–2962. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Airborne hyperspectral remote sensing to assess spatial distribution of water quality characteristics in large rivers: The Mississippi River and its tributaries in Minnesota. Remote Sens. Environ. 2013, 130, 254–265. [Google Scholar] [CrossRef]
- Urbanski, J.A.; Wochna, A.; Bubak, I.; Grzybowski, W.; Lukawska-Matuszewska, K.; Łącka, M.; Śliwińska, S.; Wojtasiewicz, B.; Zajączkowski, M. Application of Landsat 8 imagery to regional-scale assessment of lake water quality. Int. J. Appl. Earth Obs. Geoinf. 2016, 51, 28–36. [Google Scholar] [CrossRef]
- Liu, D.; Yu, S.; Cao, Z.; Qi, T.; Duan, H. Process-oriented estimation of column-integrated algal biomass in eutrophic lakes by MODIS/Aqua. Int. J. Appl. Earth Obs. Geoinf. 2021, 99, 102321. [Google Scholar] [CrossRef]













| Grade | TP (mg/L) | NH3-N (mg/L) |
|---|---|---|
| Grade I≤ | 0.02 | 0.15 |
| Grade II≤ | 0.1 | 0.5 |
| Grade III≤ | 0.2 | 1.0 |
| Grade IV≤ | 0.3 | 1.5 |
| Grade V≤ | 0.4 | 2.0 |
| Worse than Grade V> | 0.4 | 2.0 |
| Evaluation Index | Calculation Formula |
|---|---|
| Precision | |
| Recall | |
| F1 score | |
| Macro Precision | |
| Macro Recall | |
| Macro F1 score |
| Case | TP | NH3-N |
|---|---|---|
| Original dataset | 0.66 | 0.68 |
| First-order stream of protected zone | 0.71 | 0.75 |
| First-order stream of landscape zone | 0.68 | 0.85 |
| Second-order stream of industrial and agricultural zone | 0.76 | 0.83 |
| Second-order stream of landscape zone | 0.68 | 0.79 |
| Checkpoint Number | TP | NH3-N |
|---|---|---|
| 1 | 0 | 0 |
| 2 | 0 | 0 |
| 3 | 0 | 0 |
| 4 | +1 | 0 |
| 5 | 0 | +1 |
| 6 | 0 | −1 |
| 7 | 0 | 0 |
| 8 | −1 | 0 |
| 9 | 0 | −1 |
| 10 | 0 | 0 |
| 11 | +1 | +2 |
| 12 | 0 | 0 |
| 13 | +1 | 0 |
| 14 | +2 | 0 |
| 15 | 0 | +1 |
| Grading Results | TP | NH3-N |
|---|---|---|
| Correct grading | 10 | 10 |
| Overestimate 1 grade | 3 | 2 |
| Underestimate 1 grade | 1 | 2 |
| Overestimate 2 grades | 1 | 1 |
| Grading precision | 0.67 | 0.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Liu, C.; Akbar, A.; Xue, Y.; Zhou, Y. Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality. Remote Sens. 2021, 13, 4591. https://doi.org/10.3390/rs13224591
Zhou X, Liu C, Akbar A, Xue Y, Zhou Y. Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality. Remote Sensing. 2021; 13(22):4591. https://doi.org/10.3390/rs13224591
Chicago/Turabian StyleZhou, Xiaoteng, Chun Liu, Akram Akbar, Yun Xue, and Yuan Zhou. 2021. "Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality" Remote Sensing 13, no. 22: 4591. https://doi.org/10.3390/rs13224591
APA StyleZhou, X., Liu, C., Akbar, A., Xue, Y., & Zhou, Y. (2021). Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality. Remote Sensing, 13(22), 4591. https://doi.org/10.3390/rs13224591