
Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms

 , , , , , , ,
, , , , , , ,  and
and
Abstract
:1. Introduction
Conditioning Factors of Terrain Stability
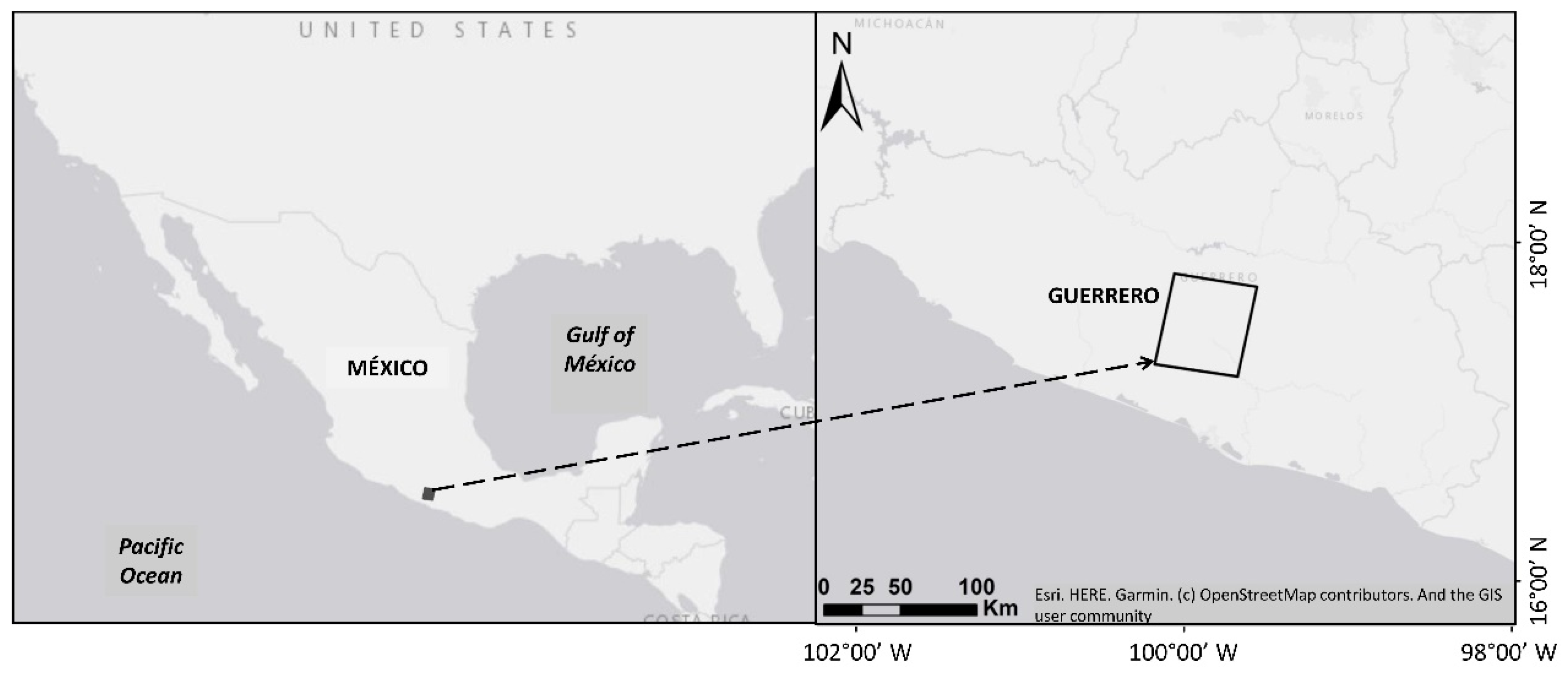
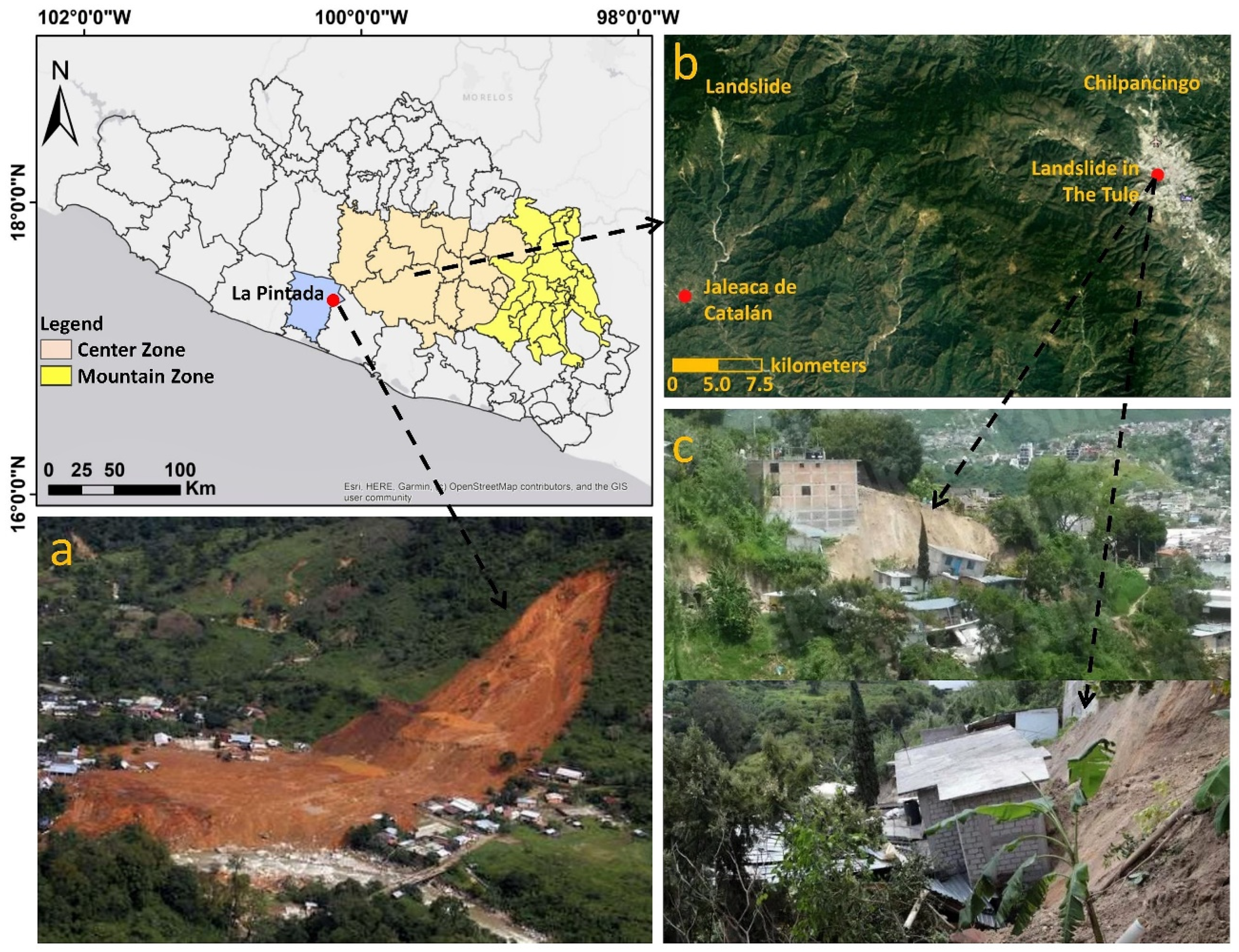
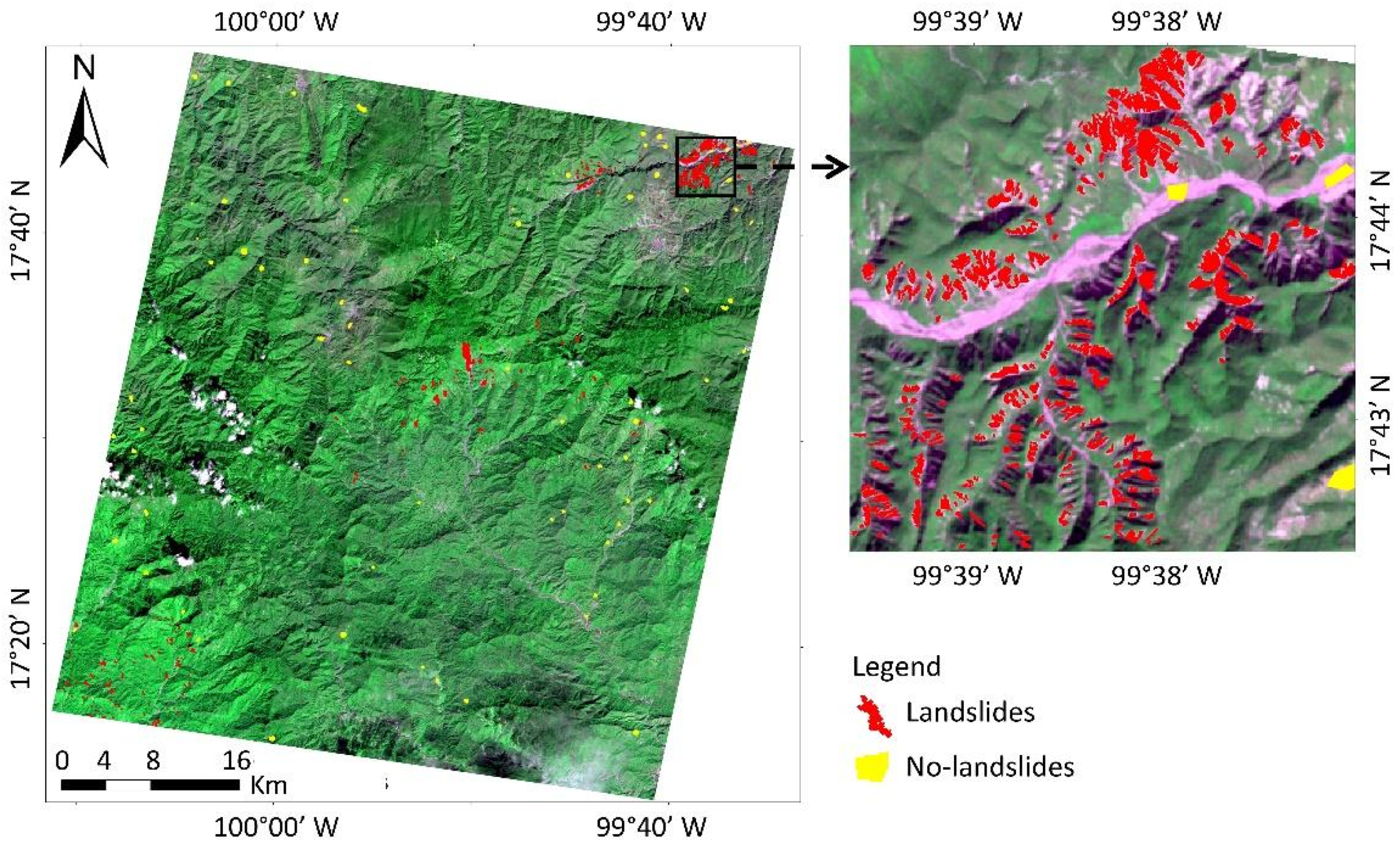
2. Study Area
3. Materials and Methods
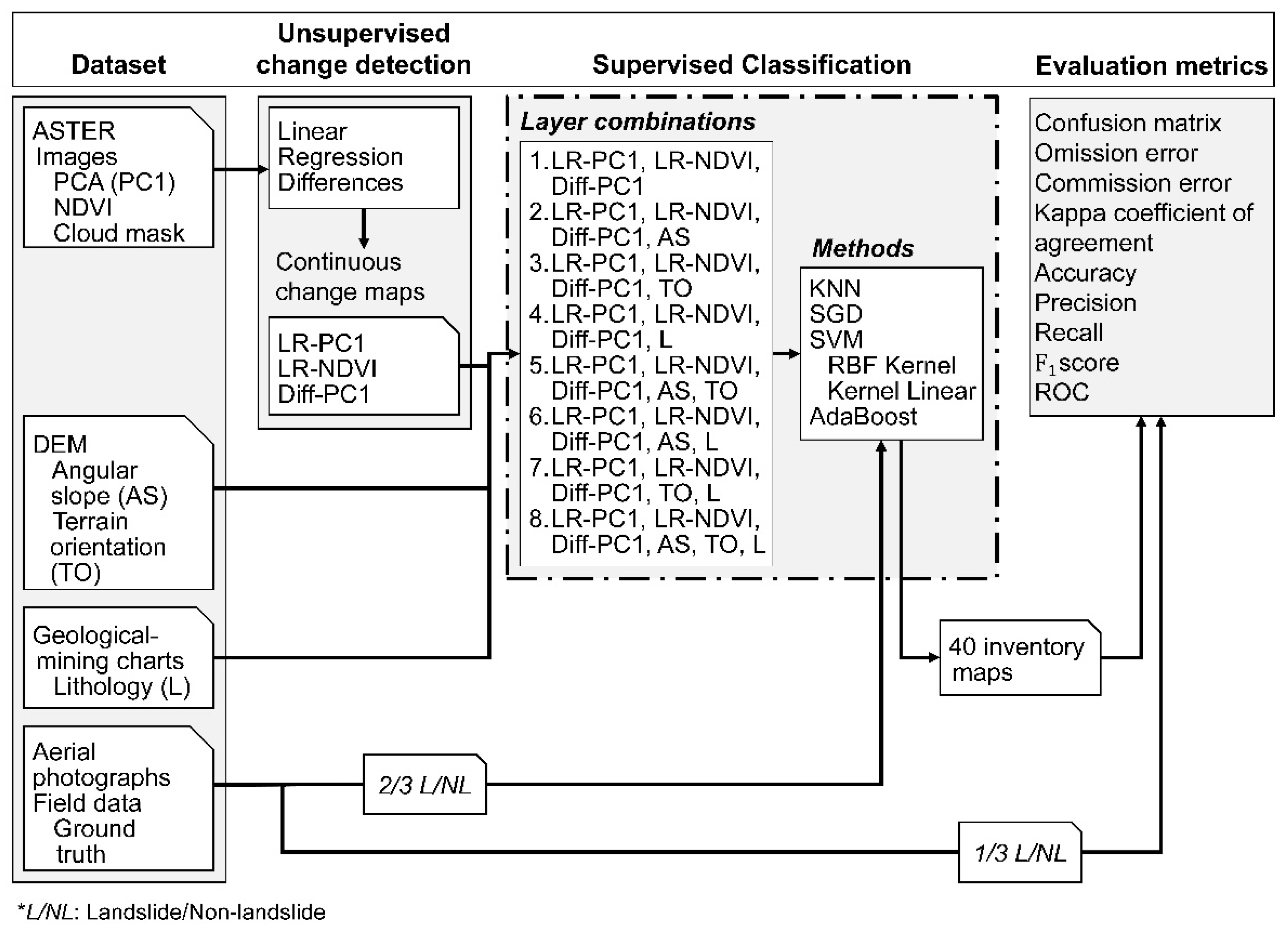
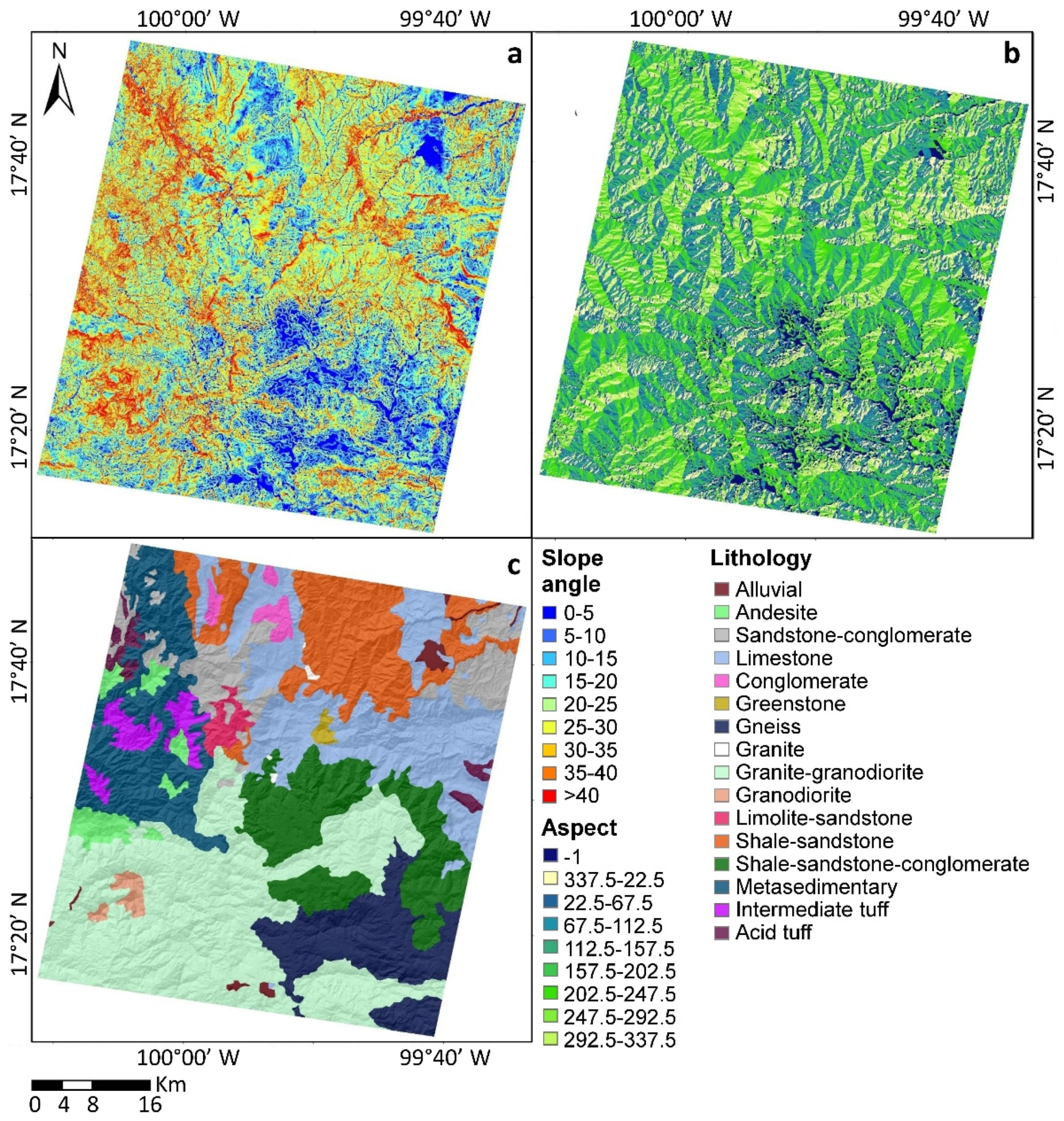
- Dataset. The first step consists of acquiring primary data: ASTER images, Digital Elevation Model (DEM), geological-mining charts, aerial photographs, and field data. Derived maps were generated from Principal Component 1 (PC1) in principal component analysis (PCA), normalized difference vegetation index (NDVI), cloud masks, slope angle (S), aspect (A), lithology (L), and ground truth (GT) samples. Dinamica EGO 5 was used to generate the NDVI images; the PCA images were obtained using ArcMap 10.3.
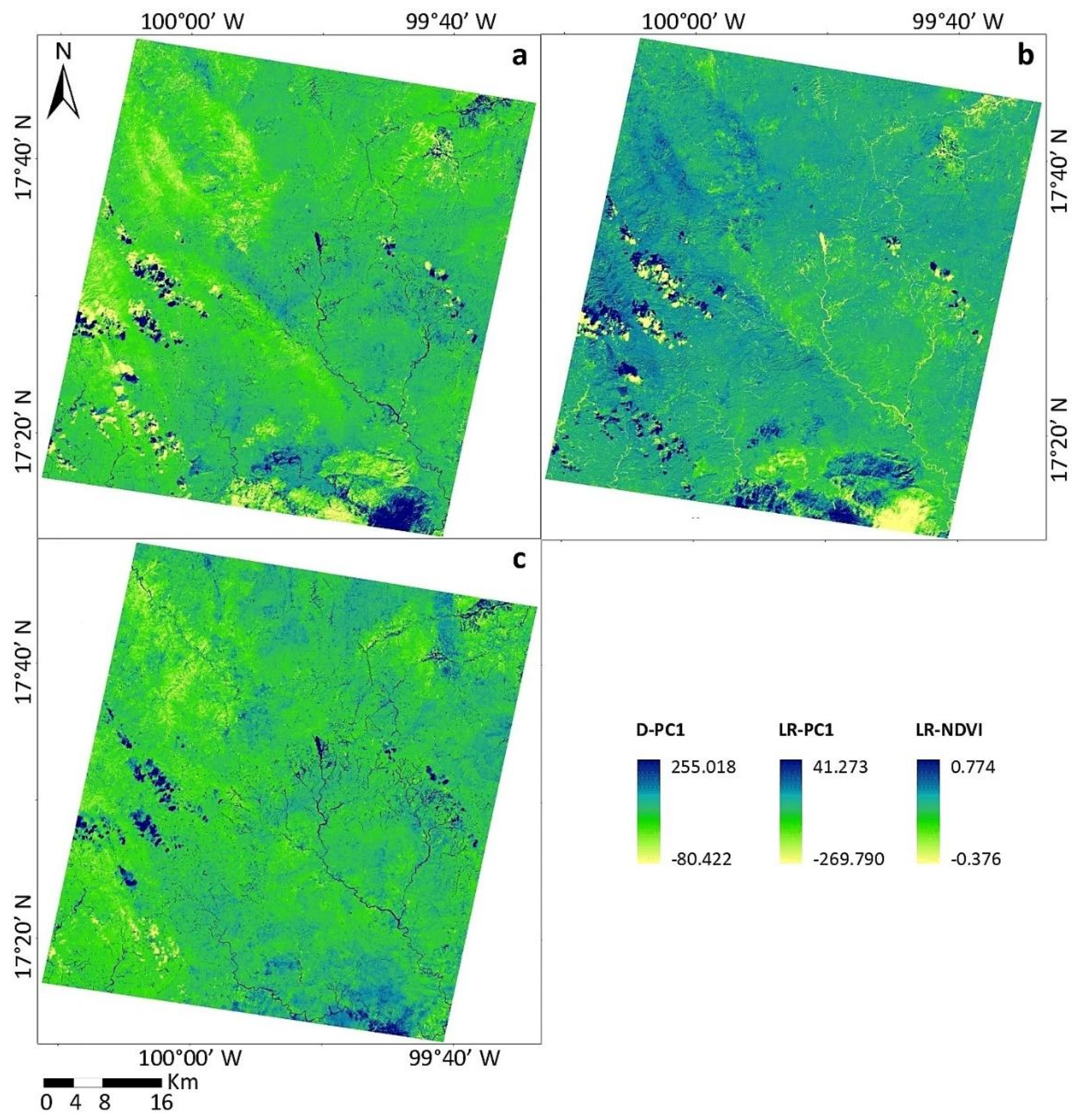
- Automatic change detection. At this stage, two change detection methods were applied, linear regression (LR) and image differencing (Diff), to the maps derived from the ASTER images. Three maps of continuous change were generated: LR applied to PC1 (LR-PC1), LR applied to NDVI (LR-NDVI), and Diff applied to PC1 (Diff-PC1). This process was performed with Dinamica EGO 5.
- Supervised classification. In this stage, the k-nearest-neighbor (KNN), stochastic gradient descent (SGD), support vector machine (SVM), and AdaBoost classifiers were applied using the previously obtained continuous change maps (LR-PC1, LR-NDVI, and Diff-PC1) and the factors of slope stability (S, A, and L) considered. The process was repeated and complemented by incorporating the factors into the classification, one by one, and combining them. All classification algorithms, so as the accuracy evaluation metrics, were run using the scikit-learn version 0.22.1 for Python 3.6.5 programming language.
- Accuracy assessment. In this stage, the inventory maps obtained by supervised classification were evaluated by confusion matrices, omission and commission errors, and metrics such as the Kappa concordance coefficient (k), accuracy (ACC), precision, recall, and F1 score. Python’s Georasters library version 0.5.20 was used to read the derived satellite images, including its metadata, and generate the maps after the classification stage.
3.1. Dataset
3.2. Ground Truth
- 2/3 of the GT samples (21,640 pixels) were used for the training stage of the classification models to identify landslides/non-landslides;
- 1/3 of the GT samples (10,822 pixels) were reserved for assessing the accuracy of the classifier methods in detecting landslides.
3.3. Automatic Change Detection
3.3.1. Linear Regression
3.3.2. Image Differencing
3.4. Supervised Classification
- First, the algorithm undergoes a learning process by generating knowledge from the association between known input and output data;
- Second, the corresponding output values are estimated based on new input data.
Classifiers
- A subset of training data is randomly generated from the original training dataset, each of which is assigned equal weights;
- The misclassified data are given greater weight, whereas correctly classified data still have the same weight;
3.5. Experimental Description
- The spectral images analyzed correspond to the best continuous change images produced by the change detection method in the previous stage, as described in Ramos-Bernal et al. (2015) [16] and Ramos-Bernal et al. (2018) [18], corresponding to LR for PC1 and NDVI images, and Diff for PC1 images. Those images were selected based on relevant differences in sites where landslides occurred during the analyzed period.
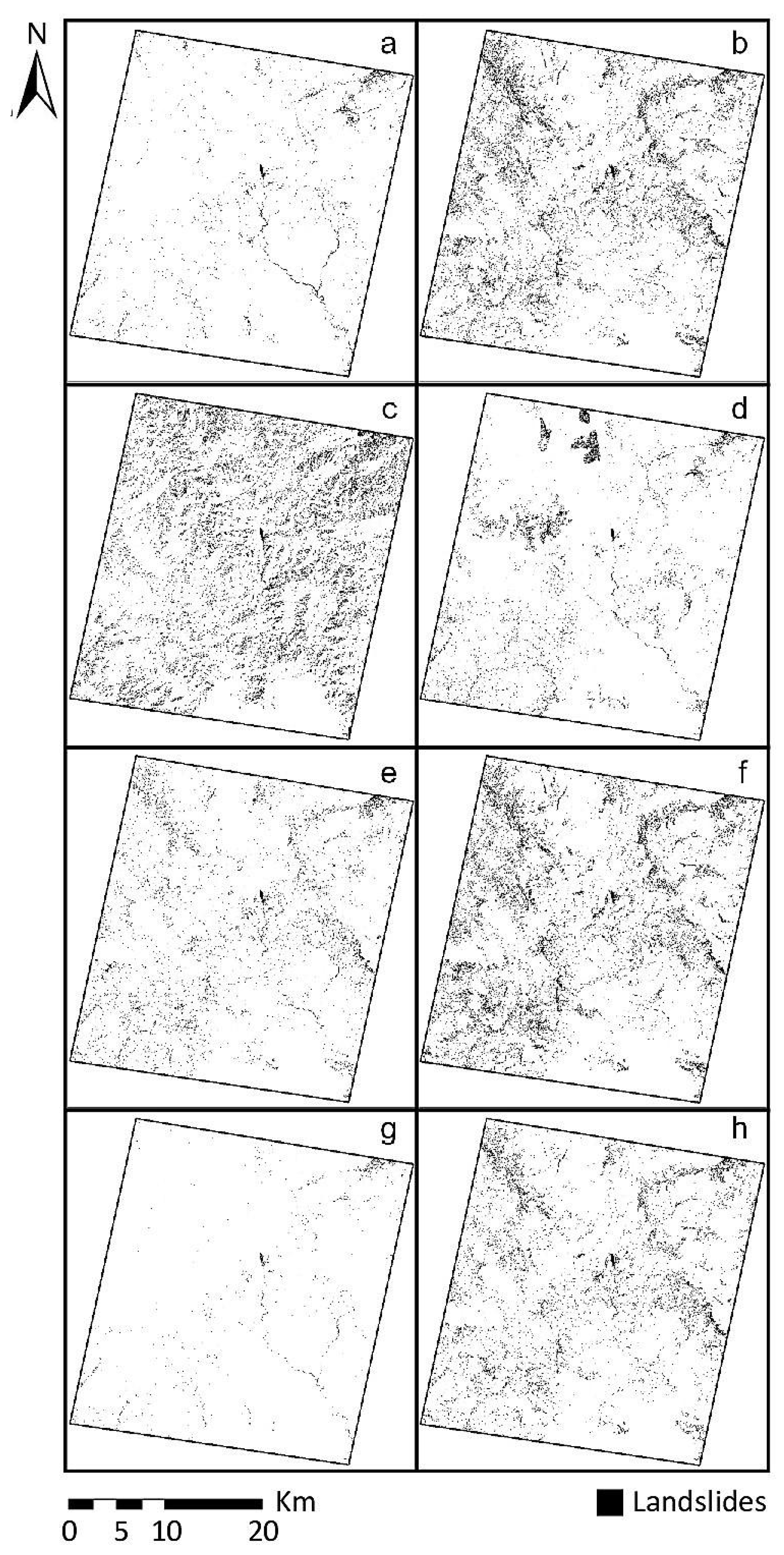
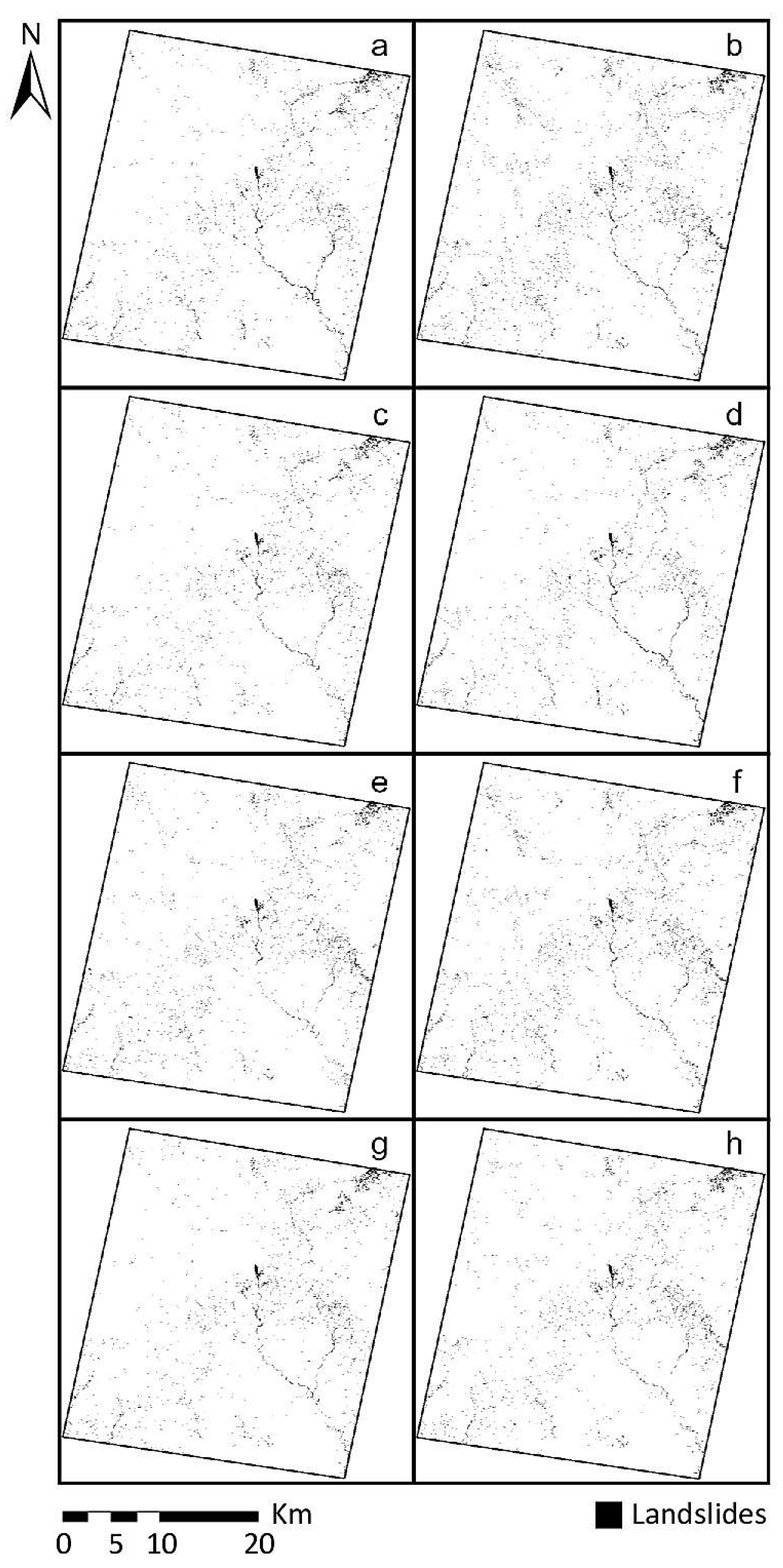
- The combinations of maps with the S, A and L factors were included in the landslide detection process, generating 40 landslide and non-landslide maps.
3.6. Accuracy Assessment
4. Results
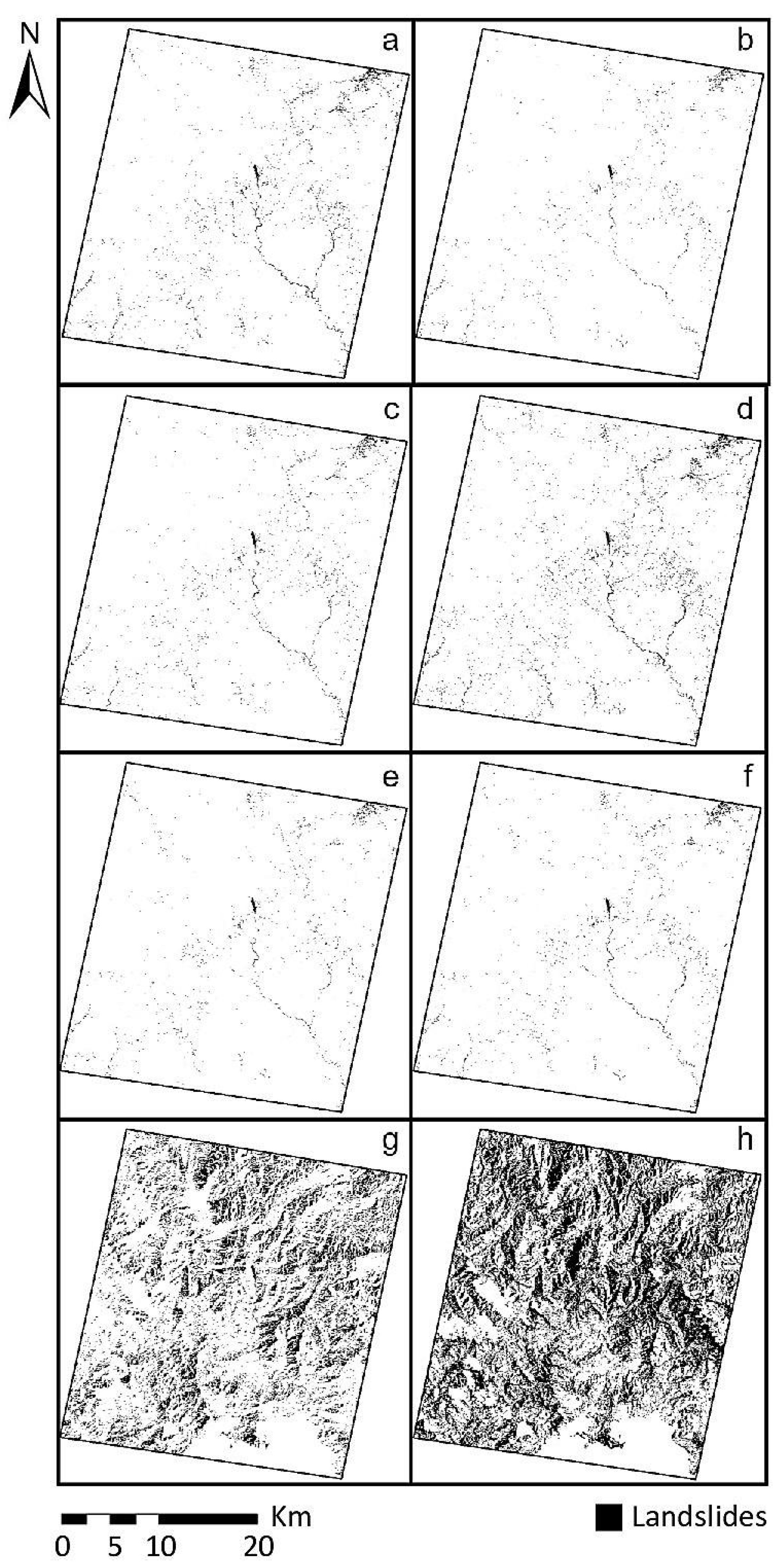
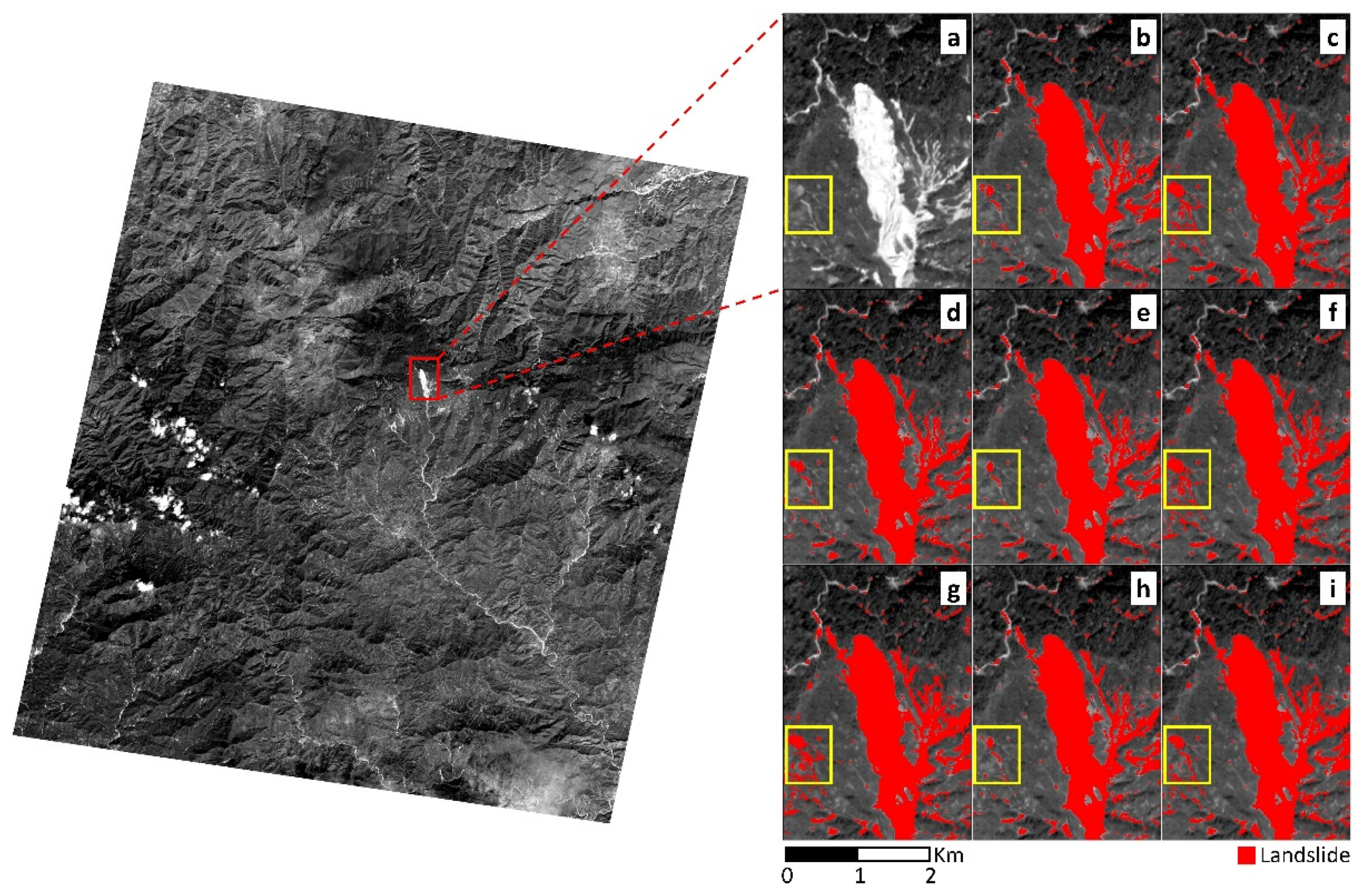
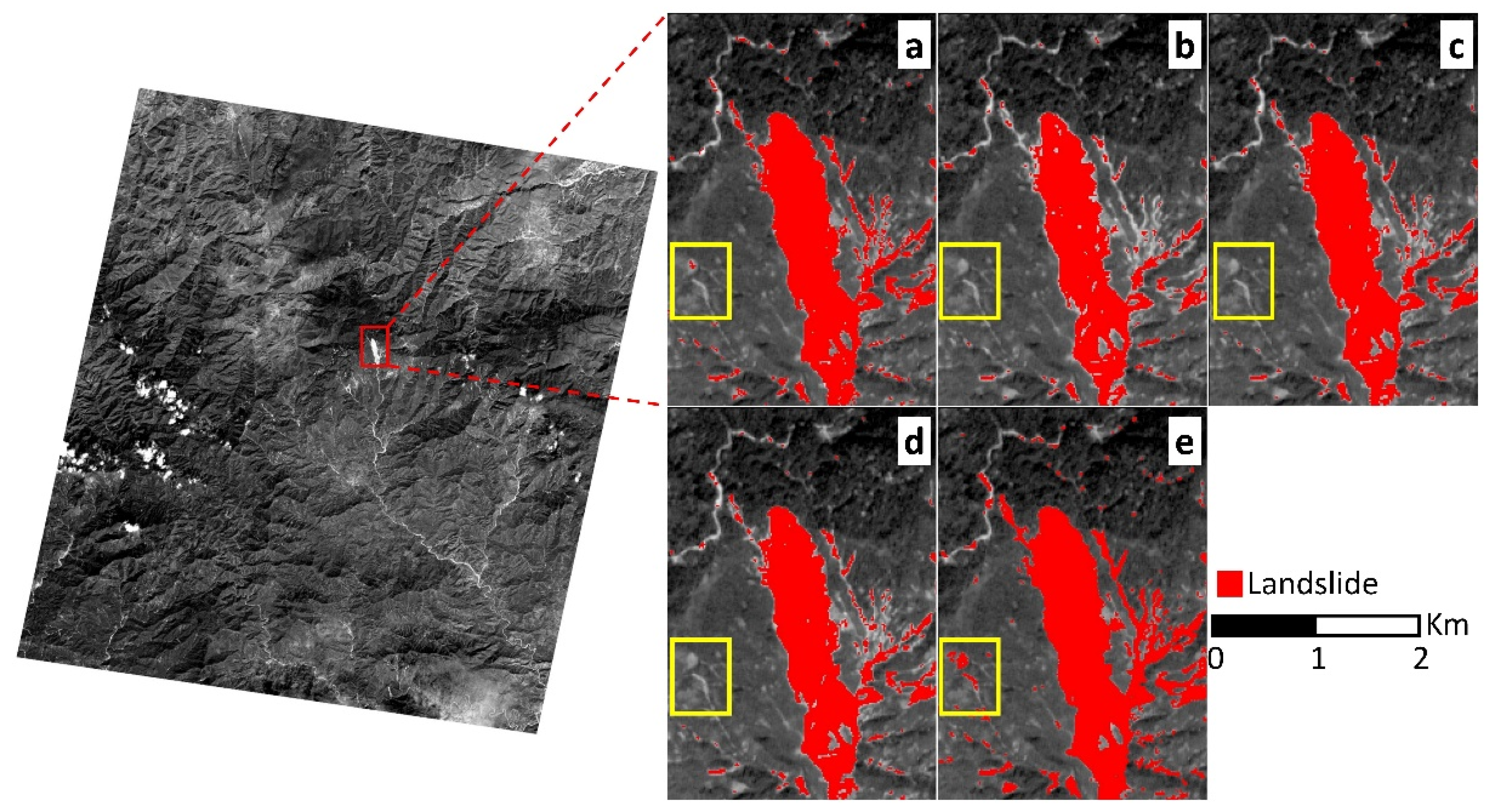
4.1. Supervised Classification
4.2. Accuracy Assessment
5. Discussion
5.1. Visual Analysis
5.2. Accuracy Assessment
5.3. Conditioning Factor Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- CRED-UNISDR. 2015 Disasters in Numbers. 2016. Available online: https://www.unisdr.org/files/47804_2015disastertrendsinfographic.pdf (accessed on 7 January 2021).
- Pereira, S.; Zêzere, J.L.; Quaresma, I.D.; Bateira, C. Landslide incidence in the North of Portugal: Analysis of a historical landslide database based on press releases and technical reports. Geomorphology 2014, 214, 514–525. [Google Scholar] [CrossRef]
- Ciampalini, A.; Raspini, F.; Bianchini, S.; Frodella, W.; Bardi, F.; Lagomarsino, D.; Di Traglia, F.; Moretti, S.; Proietti, C.; Pagliara, P.; et al. Remote sensing as tool for development of landslide databases: The case of the Messina Province (Italy) geodatabase. Geomorphology 2015, 249, 103–118. [Google Scholar] [CrossRef]
- Harp, E.L.; Jibson, R.W. Landslides triggered by the 1994 Northridge, California, earthquake. Bull. Seismol. Soc. Am. 1996, 86, S319–S332. [Google Scholar]
- Cardinali, M.; Ardizzone, F.; Galli, M.; Guzzetti, F.; Reichenbach, P. Landslides triggered by rapid snow melting: The December 1996–January 1997 event in Central Italy. In Proceedings of the 1st Plinius Conference, Siena, Italy, 16–18 October 2000; pp. 439–448. [Google Scholar]
- Bucknam, R.C.; Coe, J.A.; Chavarría, M.M.; Godt, J.W.; Tarr, A.C.; Bradley, L.-A.; Rafferty, S.; Hancock, D.; Dart, R.L.; Johnson, M.L. Landslides Triggered by Hurricane Mitch in Guatemala—Inventory and Discussion; U.S. Department of the Interior, U.S. Geological Survey: Washingtone, DC, USA, 2001.
- Malamud, B.D.; Turcotte, D.L.; Guzzetti, F.; Reichenbach, P. Landslide inventories and their statistical properties. Earth Surf. Process. Landf. 2004, 29, 687–711. [Google Scholar] [CrossRef]
- Chung, C.F.; Fabbri, A.G. Systematic procedures of landslide hazard mapping for risk assessment using spatial prediction models. In Landslide Hazard and Risk; Glade, T., Anderson, M., Crozier, M.J., Eds.; Wiley: Hoboken, NJ, USA, 2005; pp. 139–174. [Google Scholar]
- Guzzetti, F.; Galli, M.; Reichenbach, P.; Ardizzone, F.; Cardinali, M.J.N.H. Landslide hazard assessment in the Collazzone area, Umbria, Central Italy. Nat. Hazards Earth Syst. Sci. 2006, 6, 115–131. [Google Scholar] [CrossRef]
- Guzzetti, F.; Cardinali, M.; Reichenbach, P.; Carrara, A. Comparing Landslide Maps: A Case Study in the Upper Tiber River Basin, Central Italy. Environ. Manag. 2000, 25, 247–263. [Google Scholar] [CrossRef]
- Van Westen, C.J.; Castellanos, E.; Kuriakose, S.L. Spatial data for landslide susceptibility, hazard, and vulnerability assessment: An overview. Eng. Geol. 2008, 102, 112–131. [Google Scholar] [CrossRef]
- Poiraud, A. Landslide susceptibility–certainty mapping by a multi-method approach: A case study in the Tertiary basin of Puy-en-Velay (Massif central, France). Geomorphology 2014, 216, 208–224. [Google Scholar] [CrossRef]
- Vázquez-Jiménez, R.; Romero-Calcerrada, R.; Ramos-Bernal, R.N.; Arrogante-Funes, P.; Novillo, C.J. An Alternative Method for the Generation of Consistent Mapping to Monitoring Land Cover Change: A Case Study of Guerrero State in Mexico. Land 2021, 10, 731. [Google Scholar] [CrossRef]
- Martha, T.; Westen, C.J.; Kerle, N.; Jetten, V.G.; vinod Kumar, K. Landslide hazard and risk assessment using semi-automatically created landslide inventories. Geomorphology 2013, 184, 139–150. [Google Scholar] [CrossRef]
- Harp, E.L.; Keefer, D.K.; Sato, H.P.; Yagi, H. Landslide inventories: The essential part of seismic landslide hazard analyses. Eng. Geol. 2011, 122, 9–21. [Google Scholar] [CrossRef]
- Ramos-Bernal, R.N.; Vázquez-Jiménez, R.; Romero-Calcerrada, R.; Novillo, C.J.; Arrogante-Funes, P.; Sánchez-Tizapa, S. Identificación de deslizamientos de laderas aplicando técnicas de detección de cambios a imágenes Landsat en la zona costera del Estado de Guerrero, México. In Análisis Espacial y Representación Geográfica: Innovación y Aplicación; de la Riva, J., Ibarra, P., Montorio, R., Rodrigues, M., Eds.; Universidad de Zaragoza: Zaragoza, Spain, 2015; pp. 827–834. [Google Scholar]
- Nichol, J.; Wong, M.S. Satellite remote sensing for detailed landslide inventories using change detection and image fusion. Int. J. Remote Sens. 2005, 26, 1913–1926. [Google Scholar] [CrossRef]
- Ramos-Bernal, R.N.; Vázquez-Jiménez, R.; Romero-Calcerrada, R.; Arrogante-Funes, P.; Novillo, C.J. Evaluation of unsupervised change detection methods applied to landslide inventory mapping using ASTER imagery. Remote Sens. 2018, 10, 1987. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zhang, Y.; Ouyang, C.; Zhang, F.; Ma, J. Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors 2018, 18, 821. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hacıefendioğlu, K.; Demir, G.; Başağa, H.B. Landslide detection using visualization techniques for deep convolutional neural network models. Nat. Hazards 2021, 2021, 1–22. [Google Scholar]
- Hong, H.; Naghibi, S.A.; Pourghasemi, H.R.; Pradhan, B. GIS-based landslide spatial modeling in Ganzhou City, China. Arab. J. Geosci. 2016, 9, 1–26. [Google Scholar] [CrossRef]
- Chen, W.; Pourghasemi, H.R.; Kornejady, A.; Zhang, N. Landslide spatial modeling: Introducing new ensembles of ANN, MaxEnt, and SVM machine learning techniques. Geoderma 2017, 305, 314–327. [Google Scholar] [CrossRef]
- Wang, F.; Xu, P.; Wang, C.; Wang, N.; Jiang, N. Application of a GIS-Based Slope Unit Method for Landslide Susceptibility Mapping along the Longzi River, Southeastern Tibetan Plateau, China. ISPRS Int. J. Geoinf. 2017, 6, 172. [Google Scholar] [CrossRef] [Green Version]
- Mancini, F.; Ceppi, C.; Ritrovato, G. GIS and statistical analysis for landslide susceptibility mapping in the Daunia area (Italy). Nat. Hazards Earth Syst. Sci. 2010, 10, 1851–1864. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, B.; Lee, S. Landslide susceptibility assessment and factor effect analysis: Backpropagation artificial neural networks and their comparison with frequency ratio and bivariate logistic regression modelling. Environ. Model. Softw. 2010, 25, 747–759. [Google Scholar] [CrossRef]
- Yilmaz, C.; Topal, T.; Süzen, M.L. GIS-based landslide susceptibility mapping using bivariate statistical analysis in Devrek (Zonguldak-Turkey). Environ. Earth Sci. 2012, 65, 2161–2178. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Moradi, H.R.; Aghda, S.M.F. Landslide susceptibility mapping by binary logistic regression, analytical hierarchy process, and statistical index models and assessment of their performances. Nat. Hazards 2013, 69, 749–779. [Google Scholar] [CrossRef]
- Conforti, M.; Pascale, S.; Robustelli, G.; Sdao, F. Evaluation of prediction capability of the artificial neural networks for mapping landslide susceptibility in the Turbolo River catchment (northern Calabria, Italy). Catena 2014, 113, 236–250. [Google Scholar] [CrossRef]
- Dou, J.; Tien Bui, D.; Yunus, A.P.; Jia, K.; Song, X.; Revhaug, I.; Xia, H.; Zhu, Z. Optimization of causative factors for landslide susceptibility evaluation using remote sensing and GIS data in parts of Niigata, Japan. PLoS ONE 2015, 10, e0133262. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rawat, M.S.; Uniyal, D.P.; Dobhal, R.; Joshi, V.; Rawat, B.S.; Bartwal, A.; Singh, D.; Aswal, A. Study of landslide hazard zonation in Mandakini Valley, Rudraprayag district, Uttarakhand using remote sensing and GIS. Curr. Sci. 2015, 109, 158–170. [Google Scholar]
- Chen, T.; Niu, R.; Du, B.; Wang, Y. Landslide spatial susceptibility mapping by using GIS and remote sensing techniques: A case study in Zigui County, the Three Georges reservoir, China. Environ. Earth Sci. 2015, 73, 5571–5583. [Google Scholar] [CrossRef]
- Ramos-Bernal, R.N. Estudio de la Susceptibilidad al Deslizamiento de Laderas en el Estado de Guerrero, México, Aplicando Tecnologías de Información Geográfica. Ph.D. Thesis, Universidad Rey Juan Carlos, Madrid, Spain, 2018. Available online: https://burjcdigital.urjc.es/bitstream/handle/10115/15869/Tesis_Doctoral_Rocio_Nayelly_Ramos_Bernal.pdf?sequence=1&isAllowed=y (accessed on 25 May 2021).
- Cooke, R.V.; Doornkamp, J.C. Geomorphology in Environmental Management: A New Introduction; Oxford University Press: Oxford, UK, 1990. [Google Scholar]
- McDermid, G.; Franklin, S. Remote sensing and geomorphometric discrimination of slope processes. Z. Geomorphol. 1995, (Suppl. 101), 165–185. Available online: http://pascal-francis.inist.fr/vibad/index.php?action=getRecordDetail&idt=6286112 (accessed on 13 September 2021).
- Park, S.; Choi, C.; Kim, B.; Kim, J. Landslide susceptibility mapping using frequency ratio, analytic hierarchy process, logistic regression, and artificial neural network methods at the Inje area, Korea. Environ. Earth Sci. 2013, 68, 1443–1464. [Google Scholar] [CrossRef]
- Alcántara-Ayala, I. Índice de susceptibilidad a movimientos del terreno y su aplicación en una región semiárida. Rev. Mex. Cienc. Geológ. 2000, 17, 66–75. [Google Scholar]
- Guzzetti, F.; Carrara, A.; Cardinali, M.; Reichenbach, P. Landslide hazard evaluation: A review of current techniques and their application in a multi-scale study, Central Italy. Geomorphology 1999, 31, 181–216. [Google Scholar] [CrossRef]
- Cevik, E.; Topal, T. GIS-based landslide susceptibility mapping for a problematic segment of the natural gas pipeline, Hendek (Turkey). Environ. Geol. 2003, 44, 949–962. [Google Scholar] [CrossRef]
- Lee, S.; Choi, J.; Min, K. Probabilistic landslide hazard mapping using GIS and remote sensing data at Boun, Korea. Int. J. Remote Sens. 2004, 25, 2037–2052. [Google Scholar] [CrossRef]
- DeGraff, J.V.; Romesburg, H.C. Regional Landslide Susceptibility Assessment for Wildland Management: A Matrix Approach. In Thresholds in Geomorphology; Coats, C.R., Vitek, J., Eds.; Allen and Unwin: London, UK, 1980; pp. 401–414. [Google Scholar]
- Marston, R.A.; Miller, M.M.; Devkota, L.P. Geoecology and mass movement in the Manaslu-Ganesh and Langtang-Jugal himals, Nepal. Geomorphology 1998, 26, 139–150. [Google Scholar] [CrossRef]
- Dai, F.C.; Lee, C.F. Landslide characteristics and slope instability modeling using GIS, Lantau Island, Hong Kong. Geomorphology 2002, 42, 213–228. [Google Scholar] [CrossRef]
- Ayalew, L.; Yamagishi, H. The application of GIS-based logistic regression for landslide susceptibility mapping in the Kakuda-Yahiko Mountains, Central Japan. Geomorphology 2005, 65, 15–31. [Google Scholar] [CrossRef]
- Yesilnacar, E.; Topal, T. Landslide susceptibility mapping: A comparison of logistic regression and neural networks methods in a medium scale study, Hendek region (Turkey). Eng. Geol. 2005, 79, 251–266. [Google Scholar] [CrossRef]
- Nefeslioglu, H.A.; Duman, T.Y.; Durmaz, S. Landslide susceptibility mapping for a part of tectonic Kelkit Valley (Eastern Black Sea region of Turkey). Geomorphology 2008, 94, 401–418. [Google Scholar] [CrossRef]
- INEGI. Guía Para la Interpretación de Cartografía. Uso del Suelo y Vegetación; Escala 1:250,000. Serie IV; Instituto Nacional de Estadística y Geografía: Aguascalientes, AG, Mexico, 2012; p. 126. [Google Scholar]
- Raisz, E. Landforms of Mexico, 2nd ed.; United States, Office of naval research, Geographical Branch: Cambridge, MA, USA, 1987.
- Cerca-Martínez, M. Deformación y Magmatismo Cretácico Tardío-Terciario Temprano en la Zona de la Plataforma Guerrero-Morelos. Master’s Thesis, Universidad Nacional Autonoma de Mexico, Mexico City, Mexico, May 2004. [Google Scholar]
- Pérez-Gutiérrez, R. Geología y Evolución Estructural del Complejo Xolapa, Entre los Ríos Papagayo y La Sábana, Noreste de Acapulco: Guerrero, Mexico. Master’s Thesis, Universidad Nacional Autónoma de México, Mexico City, Mexico, September 2005. [Google Scholar]
- CENAPRED. Impacto Socioeconómico de los Desastres en México Durante 2013. 2014. Available online: http://www.cenapred.unam.mx/es/Publicaciones/archivos/21072014Resumen_Ejecutivo_Impacto.pdf (accessed on 29 June 2021).
- Reyes, L. A 2 años de ‘Ingrid’ y ‘Manuel’, los Damnificados en Guerrero aún Esperan. 2015. CNN. Available online: https://expansion.mx/nacional/2015/09/15/a-2-anos-de-ingrid-y-manuel-los-damnificados-en-guerrero-aun-esperan (accessed on 13 September 2021).
- Noticieros Televisa. Derrumbe de Ladera Afecta 10 Casas en Chilpacingo, Guerrero—Noticieros Televisa. 2017. Available online: https://noticieros.televisa.com/ultimas-noticias/derrumbe-ladera-afecta-10-casas-chilpacingo-guerrero/ (accessed on 18 December 2020).
- INEGI. Censo de Población y Vivienda 2010. 2011. Available online: https://www.inegi.org.mx/programas/ccpv/2010/ (accessed on 20 October 2020).
- Vázquez-Jiménez, R.; Romero-Calcerrada, R.; Ramos-Bernal, R.N.; Arrogante-Funes, P.; Novillo, C.J. Topographic Correction to Landsat Imagery through Slope Classification by Applying the SCS+C Method in Mountainous Forest Areas. ISPRS Int. J. Geoinf. 2017, 6, 287. [Google Scholar] [CrossRef]
- Soenen, S.A.; Peddle, D.R.; Coburn, C.A. A Modified Sun-Canopy-Sensor Topographic Correction in Forested Terrain. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2148–2159. [Google Scholar] [CrossRef]
- Chuvieco, E. Teledetección Ambiental: La Observación de la Tierra Desde el Espacio, 1st ed.; Ariel: Madrid, Spain, 2010. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Tucker, C.J.; Sellers, P.J. Satellite remote sensing of primary production. Int. J. Remote Sens. 1986, 7, 1395–1416. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Ridd, M.K.; Liu, J. A comparison of four algorithms for change detection in an urban environment. Remote Sens. Environ. 1998, 63, 95–100. [Google Scholar] [CrossRef]
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef] [Green Version]
- Youssef, A.M.; Pourghasemi, H.R. Landslide susceptibility mapping using machine learning algorithms and comparison of their performance at Abha Basin, Asir Region, Saudi Arabia. Geosci. Front. 2021, 12, 639–655. [Google Scholar] [CrossRef]
- Zhang, Z. Introduction to machine learning: K-nearest neighbors. Ann. Transl. Med. 2016, 4, 11. [Google Scholar] [CrossRef] [Green Version]
- Amari, S.-i. Backpropagation and stochastic gradient descent method. Neurocomputing 1993, 5, 185–196. [Google Scholar] [CrossRef]
- Mezaal, M.; Pradhan, B.; Rizeei, H. Improving Landslide Detection from Airborne Laser Scanning Data Using Optimized Dempster–Shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Hong, S.-M.; Jung, H.-S. A Support Vector Machine for Landslide Susceptibility Mapping in Gangwon Province, Korea. Sustainability 2017, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Adnan, M.S.G.; Rahman, M.S.; Ahmed, N.; Ahmed, B.; Rabbi, M.F.; Rahman, R.M. Improving spatial agreement in machine learning-based landslide susceptibility mapping. Remote Sens. 2020, 12, 3347. [Google Scholar] [CrossRef]
- Al-Najjar, H.A.H.; Pradhan, B. Spatial landslide susceptibility assessment using machine learning techniques assisted by additional data created with generative adversarial networks. Geosci. Front. 2021, 12, 625–637. [Google Scholar] [CrossRef]
- Bui, D.T.; Tsangaratos, P.; Nguyen, V.T.; Van Liem, N.; Trinh, P.T. Comparing the prediction performance of a Deep Learning Neural Network model with conventional machine learning models in landslide susceptibility assessment. Catena 2020, 188, 104426. [Google Scholar] [CrossRef]
- Peethambaran, B.; Anbalagan, R.; Kanungo, D.P.; Goswami, A.; Shihabudheen, K.V. A comparative evaluation of supervised machine learning algorithms for township level landslide susceptibility zonation in parts of Indian Himalayas. Catena 2020, 195, 104751. [Google Scholar] [CrossRef]
- Heleno, S.; Matias, M.; Pina, P.; Sousa, A.J. Semiautomated object-based classification of rain-induced landslides with VHR multispectral images on Madeira Island. Nat. Hazards Earth Syst. Sci. 2016, 16, 1035–1048. [Google Scholar] [CrossRef] [Green Version]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Tran, Q.C.; Do Minh, D.; Jaafari, A.; Al-Ansari, N.; Minh, D.D.; Van, D.T.; Nguyen, D.A.; Tran, T.H.; Ho, L.S.; Nguyen, D.H.; et al. Novel ensemble landslide predictive models based on the hyperpipes algorithm: A case study in the Nam Dam Commune, Vietnam. Appl. Sci. 2020, 10, 3710. [Google Scholar] [CrossRef]
- Bui, D.T.; Tsangaratos, P.; Ngo, P.T.T.; Pham, T.D.; Pham, B.T. Flash flood susceptibility modeling using an optimized fuzzy rule based feature selection technique and tree based ensemble methods. Sci. Total. Environ. 2019, 668, 1038–1054. [Google Scholar] [CrossRef]
- He, Q.; Jiang, Z.; Wang, M.; Liu, K. Landslide and wildfire susceptibility assessment in southeast asia using ensemble machine learning methods. Remote Sens. 2021, 13, 1–25. [Google Scholar]
- Wu, Y.; Ke, Y.; Chen, Z.; Liang, S.; Zhao, H.; Hong, H. Application of alternating decision tree with AdaBoost and bagging ensembles for landslide susceptibility mapping. Catena 2020, 187, 104396. [Google Scholar] [CrossRef]
- Pham, B.T.; Bui, D.T.; Indra, P.; Dholakia, M.B. Landslide Susceptibility Assessment at a Part of Uttarakhand Himalaya, India using GIS-based Statistical Approach of Frequency Ratio Method. Int. J. Eng. Res. Technol. 2015, 4, 338–344. [Google Scholar]
- Tien Bui, D.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, V. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2015, 13, 361–378. [Google Scholar] [CrossRef]
- Pham, B.T.; Tien Bui, D.; Prakash, I.; Dholakia, M.B. Hybrid integration of Multilayer Perceptron Neural Networks and machine learning ensembles for landslide susceptibility assessment at Himalayan area (India) using GIS. Catena 2017, 149, 52–63. [Google Scholar] [CrossRef]
- Nhu, V.H.; Mohammadi, A.; Shahabi, H.; Ahmad, B.B.; Al-Ansari, N.; Shirzadi, A.; Clague, J.J.; Jaafari, A.; Chen, W.; Nguyen, H. Landslide susceptibility mapping using machine learning algorithms and remote sensing data in a tropical environment. Int. J. Environ. Res. Public Health 2020, 17, 4933. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–40. [Google Scholar] [CrossRef]
- Couto, P. Assessing the accuracy of spatial simulation models. Ecol. Model. 2003, 167, 181–198. [Google Scholar] [CrossRef]
- Lu, H.; Ma, L.; Fu, X.; Liu, C.; Wang, Z.; Tang, M.; Li, N. Landslides Information Extraction Using Object-Oriented Image Analysis Paradigm Based on Deep Learning and Transfer Learning. Remote Sens. 2020, 12, 752. [Google Scholar] [CrossRef] [Green Version]
- Defang, L.; Li, J.; Fan, F. Classification of landslides on the southeastern Tibet Plateau based on transfer learning and limited labelled datasets. Remote Sens. Lett. 2021, 12, 286–295. [Google Scholar] [CrossRef]
- Qin, S.; Guo, X.; Sun, J.; Qiao, S.; Zhang, L.; Yao, J.; Cheng, Q.; Zhang, Y. Landslide Detection from Open Satellite Imagery Using Distant Domain Transfer Learning. Remote Sens. 2021, 13, 3383. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Input Classification | |||||||
|---|---|---|---|---|---|---|---|---|
| LR-PC1 | * | * | * | * | * | * | * | * |
| LR-NDVI | * | * | * | * | * | * | * | * |
| Diff-PC1 | * | * | * | * | * | * | * | * |
| Slope angle (S) | * | * | * | * | ||||
| Aspect (A) | * | * | * | * | ||||
| Lithology (L) | * | * | * | * | ||||
| Combination | C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 |
| Classifiers | Parameters |
|---|---|
| KNN | N_neighbors = 5, weights = “uniform”, algorithm = “auto”, leaf_size = 30, p = 2, metric = “minkowski”, mertric_params = None, n_jobs = None, Kwargs |
| SGD | Loss = “hinge”, penalty = ”l2”, alpha = 0.0001, l1_ratio = 0.15, fit_intercept = True, max_iter = 1000, tol = 0.001, shuffle = True, verbose = 0, epsilon = 0.1, n_jobs = _None, random_state = 0, learning_rate = “optimal”, eta0 = 0.0, power_t = 0.5, early_stopping = False, validation_fraction = 0.1, n_iter_no_changes = 5, class_weight = None, warm_start = False, average = False |
| SVM RBF kernel | C = 10, kernel = “rbf”, degree = 3, gamma = “auto_deprecate”, coef0 = 0.0, shrinking = True, probability = False, tol = 0.001, cache_size = 200, class_weight = None, verbose = False, max_iter = −1, decision_fuction_shape = “ovr”, random_state = 0. |
| SVM linear kernel | Penalty = “l2”, loss = “squared_hinge”, dual = True, tol = 0.0001, C = 1.0, multi_class = ”ovr”, fit_intercept = True, intercept_scaling = 1, class_weight = None, verbose = 0, random_state = None, max_iter = 1000 |
| AdaBoost | Base_estimator = None, n_estimators = 50, learning_rate = 1.0, algorithm = “SAMME.R”, random_state = 0 |
| Method | Equations |
|---|---|
| Kappa concordance coefficient | is the Kappa coefficient of agreement, is the sample size, is the observed agreement, and is the expected agreement in each category . |
| Accuracy | corresponds to true-negative pixels; FP represents False-Positive pixels; TP represents true-positive pixels, and FN represents False-Negative pixels. |
| Precision | represents False-Positive pixels, and TP represents True-Positive pixels. |
| Recall | represents True-Positive pixels, and represents false-negative pixels. |
| F1 score |
| Method | Combination | Precision | Recall | F1 Score | Accuracy | Kappa | Omission Error | Commission Error |
|---|---|---|---|---|---|---|---|---|
| KNN | C1 | 0.94 | 0.90 | 0.92 | 0.93 | 0.850 | 7.324 | 7.569 |
| C2 | 0.97 | 0.93 | 0.95 | 0.96 | 0.911 | 4.274 | 4.527 | |
| C3 | 0.97 | 0.92 | 0.94 | 0.94 | 0.888 | 5.372 | 5.700 | |
| C4 | 0.96 | 0.93 | 0.95 | 0.95 | 0.899 | 4.927 | 5.092 | |
| C5 | 0.98 | 0.94 | 0.96 | 0.96 | 0.927 | 3.480 | 3.714 | |
| C6 | 0.98 | 0.95 | 0.97 | 0.97 | 0.937 | 3.043 | 3.252 | |
| C7 | 0.97 | 0.93 | 0.95 | 0.95 | 0.907 | 4.479 | 4.718 | |
| C8 | 0.99 | 0.95 | 0.97 | 0.97 | 0.944 | 2.658 | 2.860 | |
| SGD | C1 | 0.91 | 0.82 | 0.86 | 0.88 | 0.751 | 11.884 | 12.657 |
| C2 | 0.93 | 0.92 | 0.92 | 0.93 | 0.857 | 7.083 | 7.165 | |
| C3 | 0.85 | 0.87 | 0.86 | 0.87 | 0.732 | 13.414 | 13.366 | |
| C4 | 0.89 | 0.84 | 0.87 | 0.88 | 0.751 | 12.253 | 12.567 | |
| C5 | 0.96 | 0.9 | 0.93 | 0.94 | 0.873 | 6.075 | 6.470 | |
| C6 | 0.93 | 0.91 | 0.92 | 0.92 | 0.846 | 7.650 | 7.712 | |
| C7 | 0.96 | 0.62 | 0.75 | 0.81 | 0.606 | 15.232 | 20.211 | |
| C8 | 0.95 | 0.91 | 0.93 | 0.94 | 0.875 | 6.083 | 6.324 | |
| SVM RBF kernel | C1 | 0.93 | 0.87 | 0.9 | 0.91 | 0.818 | 8.823 | 9.232 |
| C2 | 0.96 | 0.9 | 0.93 | 0.94 | 0.870 | 6.268 | 6.628 | |
| C3 | 0.95 | 0.88 | 0.91 | 0.92 | 0.839 | 7.708 | 8.193 | |
| C4 | 0.93 | 0.87 | 0.9 | 0.91 | 0.817 | 8.853 | 9.272 | |
| C5 | 0.96 | 0.9 | 0.93 | 0.94 | 0.876 | 5.891 | 6.322 | |
| C6 | 0.96 | 0.9 | 0.93 | 0.93 | 0.867 | 6.411 | 6.791 | |
| C7 | 0.95 | 0.88 | 0.91 | 0.92 | 0.840 | 7.684 | 8.164 | |
| C8 | 0.96 | 0.9 | 0.93 | 0.94 | 0.872 | 6.077 | 6.532 | |
| SVM linear kernel | C1 | 0.93 | 0.87 | 0.9 | 0.91 | 0.817 | 8.830 | 9.268 |
| C2 | 0.98 | 0.78 | 0.87 | 0.88 | 0.767 | 9.718 | 12.020 | |
| C3 | 0.95 | 0.82 | 0.88 | 0.9 | 0.789 | 9.539 | 10.803 | |
| C4 | 0.90 | 0.91 | 0.91 | 0.91 | 0.821 | 8.952 | 8.912 | |
| C5 | 0.97 | 0.76 | 0.85 | 0.88 | 0.750 | 10.412 | 12.890 | |
| C6 | 0.97 | 0.85 | 0.9 | 0.91 | 0.825 | 7.944 | 9.010 | |
| C7 | 0.84 | 0.86 | 0.85 | 0.85 | 0.709 | 14.550 | 14.472 | |
| C8 | 0.73 | 0.97 | 0.83 | 0.81 | 0.627 | 15.866 | 18.157 | |
| AdaBoost | C1 | 0.93 | 0.93 | 0.93 | 0.93 | 0.861 | 6.934 | 6.945 |
| C2 | 0.98 | 0.97 | 0.98 | 0.98 | 0.956 | 2.163 | 2.208 | |
| C3 | 0.97 | 0.94 | 0.96 | 0.96 | 0.922 | 3.806 | 3.969 | |
| C4 | 0.95 | 0.96 | 0.95 | 0.96 | 0.914 | 4.317 | 4.294 | |
| C5 | 0.98 | 0.97 | 0.98 | 0.98 | 0.956 | 2.162 | 2.208 | |
| C6 | 0.98 | 0.98 | 0.98 | 0.98 | 0.965 | 1.767 | 1.772 | |
| C7 | 0.98 | 0.97 | 0.97 | 0.97 | 0.947 | 2.609 | 2.651 | |
| C8 | 0.98 | 0.98 | 0.98 | 0.98 | 0.962 | 1.920 | 1.894 |
| Method | C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | Std. Dev. | Mean |
|---|---|---|---|---|---|---|---|---|---|---|
| KNN | 1.14 | 2.83 | 2.68 | 2.73 | 3.46 | 4.39 | 3.40 | 4.81 | 1.13 | 3.18 |
| SGD | 0.78 | 4.47 | 5.81 | 1.87 | 1.81 | 4.99 | 0.29 | 2.85 | 2.03 | 2.86 |
| SVM RBF kernel | 0.82 | 1.04 | 0.73 | 0.81 | 0.82 | 0.97 | 0.73 | 0.79 | 0.11 | 0.84 |
| SVM linear kernel | 0.80 | 0.38 | 0.63 | 1.2 | 0.44 | 0.56 | 11.76 | 25.09 | 8.96 | 5.11 |
| AdaBoost | 1.56 | 2.00 | 1.59 | 1.60 | 2.12 | 2.13 | 1.38 | 2.14 | 0.31 | 1.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos-Bernal, R.N.; Vázquez-Jiménez, R.; Cantú-Ramírez, C.A.; Alarcón-Paredes, A.; Alonso-Silverio, G.A.; G. Bruzón, A.; Arrogante-Funes, F.; Martín-González, F.; Novillo, C.J.; Arrogante-Funes, P. Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms. Remote Sens. 2021, 13, 4515. https://doi.org/10.3390/rs13224515
Ramos-Bernal RN, Vázquez-Jiménez R, Cantú-Ramírez CA, Alarcón-Paredes A, Alonso-Silverio GA, G. Bruzón A, Arrogante-Funes F, Martín-González F, Novillo CJ, Arrogante-Funes P. Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms. Remote Sensing. 2021; 13(22):4515. https://doi.org/10.3390/rs13224515
Chicago/Turabian StyleRamos-Bernal, Rocío N., René Vázquez-Jiménez, Claudia A. Cantú-Ramírez, Antonio Alarcón-Paredes, Gustavo A. Alonso-Silverio, Adrián G. Bruzón, Fátima Arrogante-Funes, Fidel Martín-González, Carlos J. Novillo, and Patricia Arrogante-Funes. 2021. "Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms" Remote Sensing 13, no. 22: 4515. https://doi.org/10.3390/rs13224515
APA StyleRamos-Bernal, R. N., Vázquez-Jiménez, R., Cantú-Ramírez, C. A., Alarcón-Paredes, A., Alonso-Silverio, G. A., G. Bruzón, A., Arrogante-Funes, F., Martín-González, F., Novillo, C. J., & Arrogante-Funes, P. (2021). Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms. Remote Sensing, 13(22), 4515. https://doi.org/10.3390/rs13224515