
Detecting Low-Intensity Fires in East Asia Using VIIRS Data: An Improved Contextual Algorithm



Abstract
:1. Introduction
2. Input Data
3. Fire Detection Algorithm
3.1. Contextual Concept
3.2. Combined Fire Weight Probability
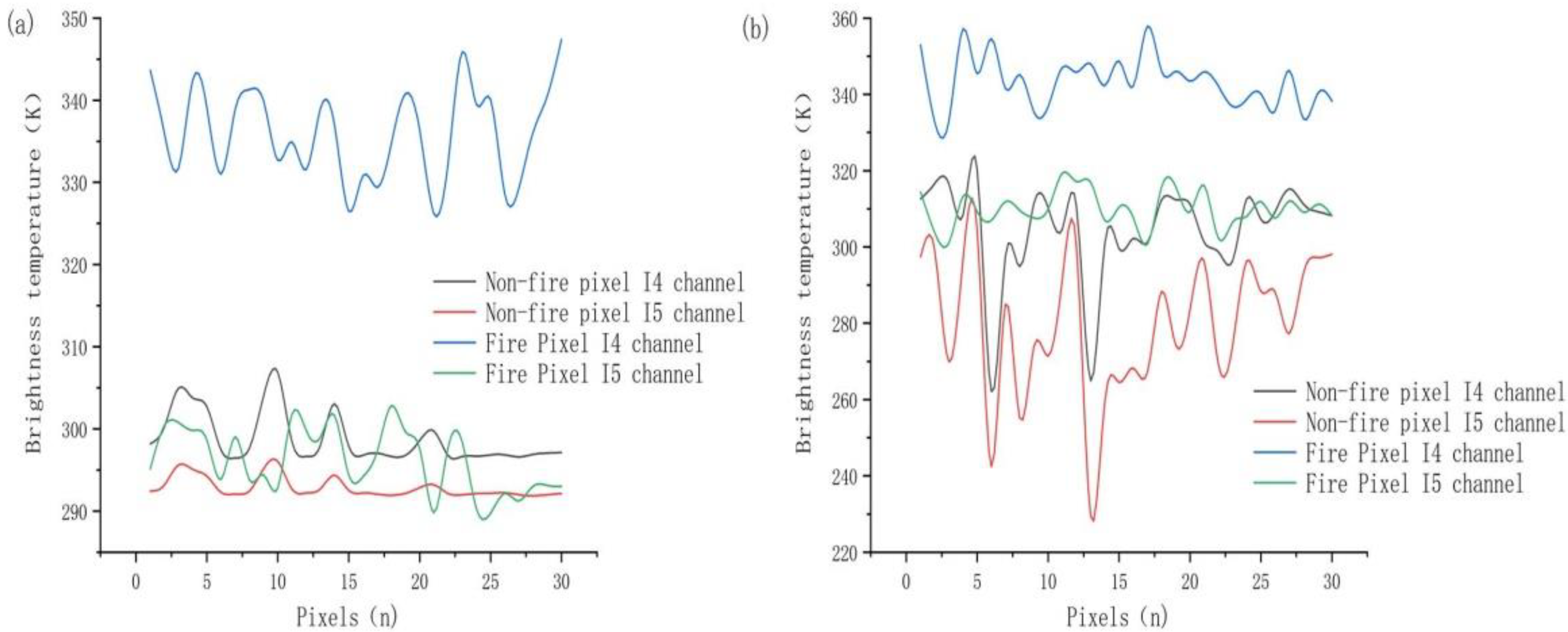
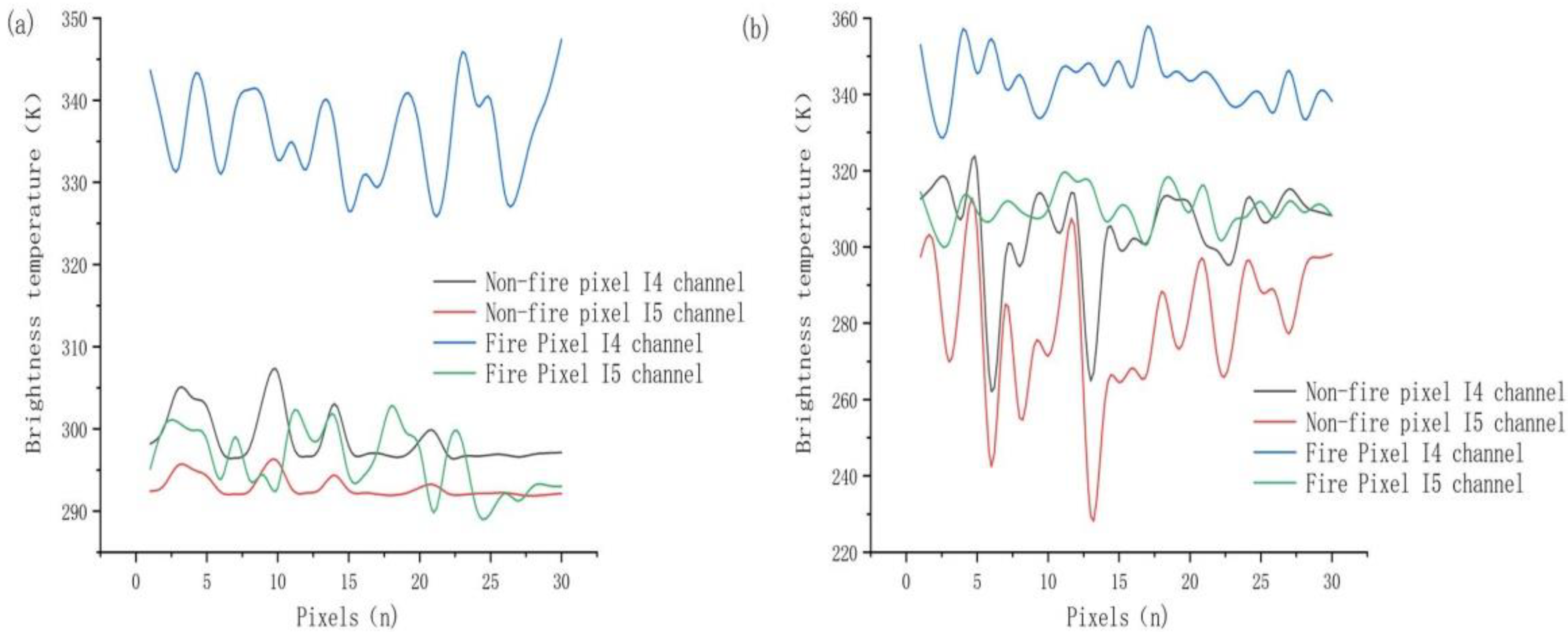
3.2.1. Spectral Test Weight
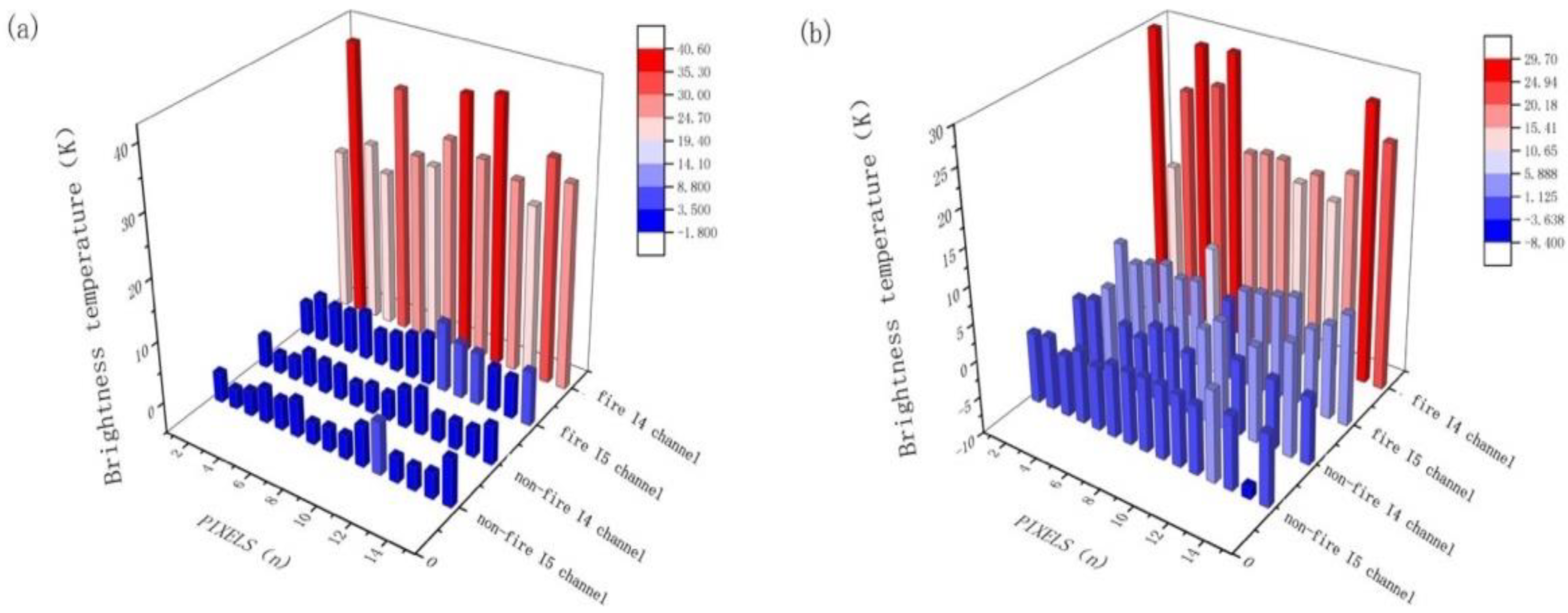
3.2.2. Contextual Test Weight
3.2.3. Weight Calculation
3.3. Optimal Threshold of New Fire
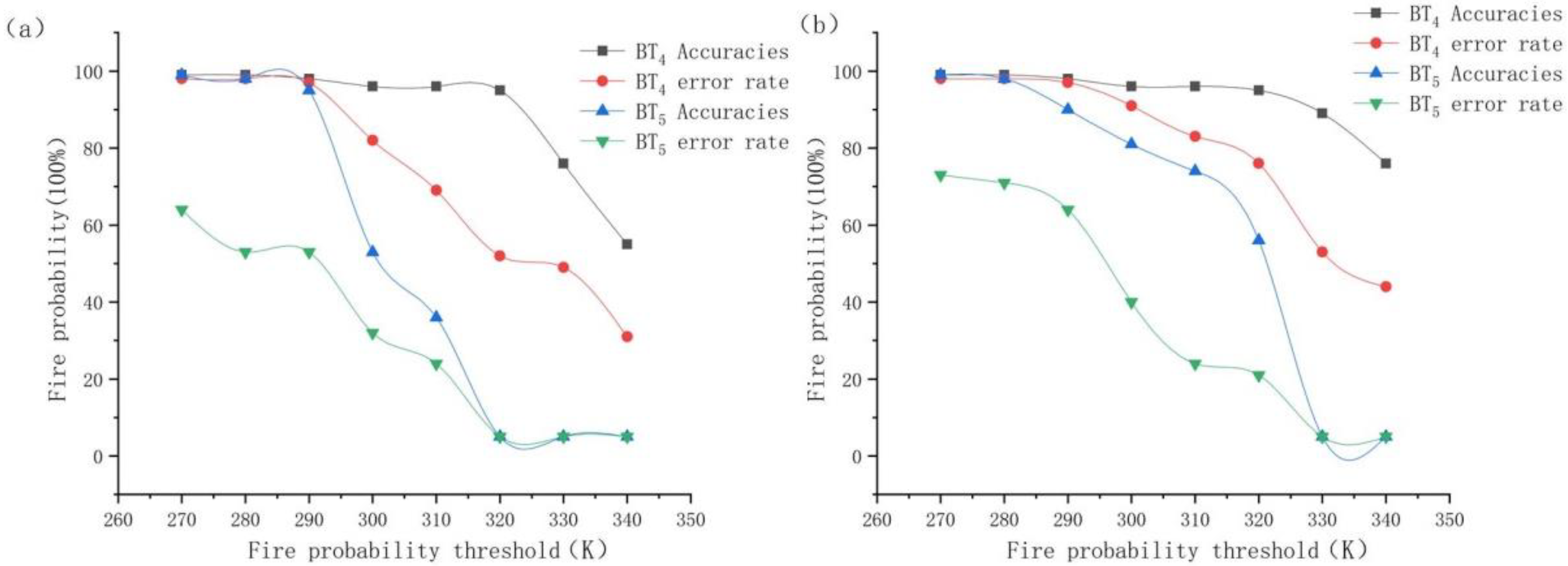
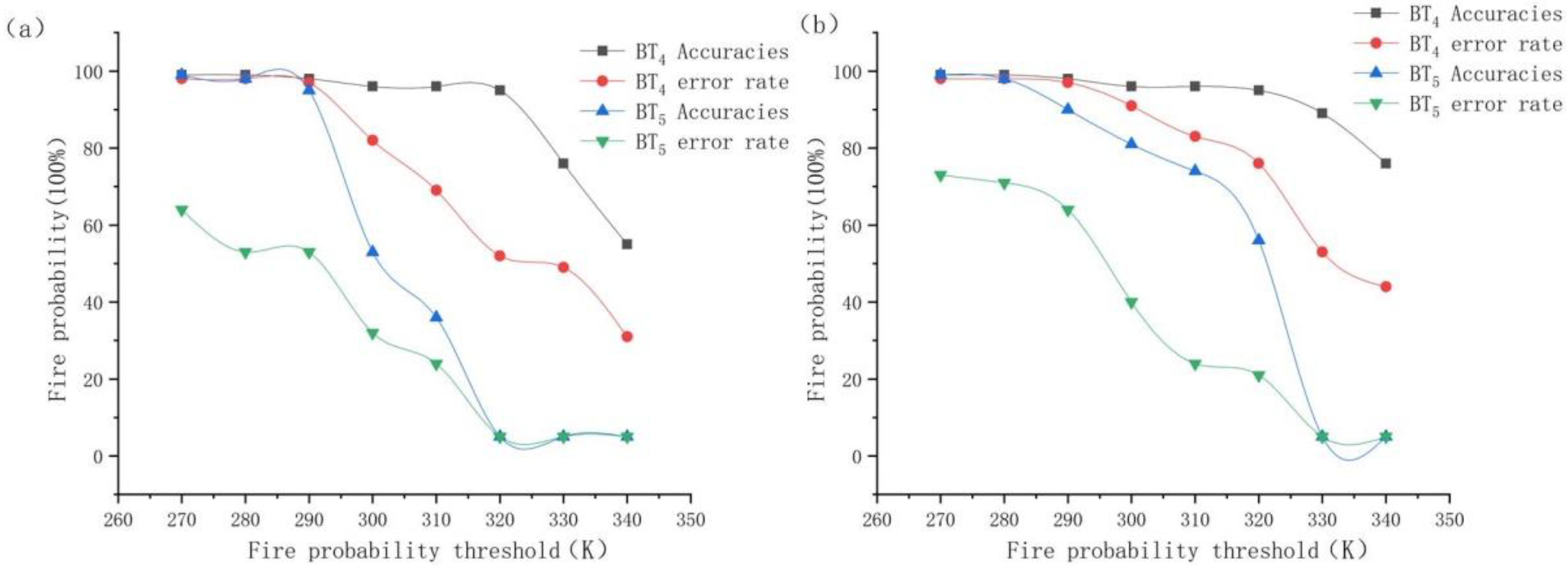
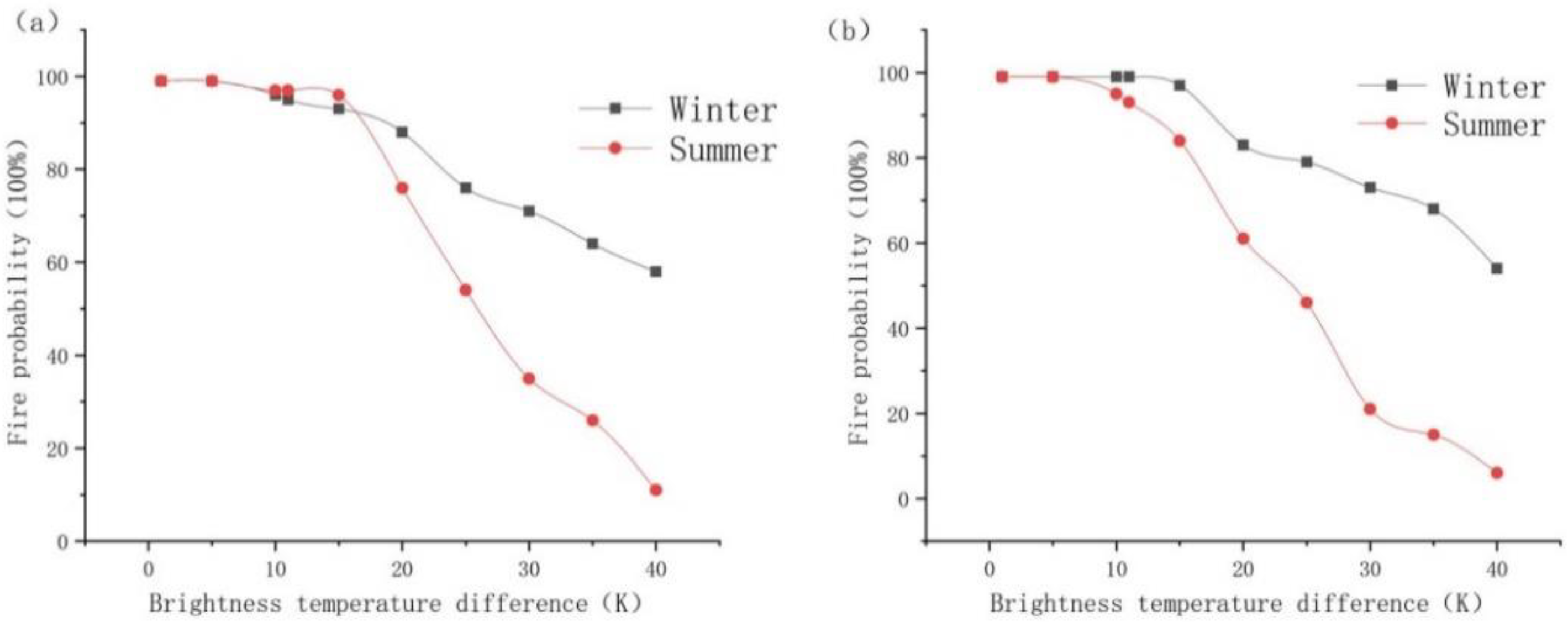
3.3.1. Optimum Spectral Threshold
3.3.2. Optimal Contextual Threshold
4. Results and Discussion
4.1. Comparison of Algorithms in Summer
4.2. Comparison of Algorithms in Winter
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Natarajan, M.; Pierce, R.B.; Schaack, T.K.; Lenzen, A.J.; Al-Saadi, J.A.; Soja, A.J.; Charlock, T.P.; Rose, F.G.; Winker, D.M.; Worden, J.R. Radiative forcing due to enhancements in tropospheric ozone and carbonaceous aerosols caused by Asian fires during spring. J. Geophys. Res. 2008, 117, D06307. [Google Scholar] [CrossRef] [Green Version]
- van der Werf, G.R.; Randerson, J.T.; Collatz, G.J.; Giglio, L.; Kasibhatla, P.S.; Arellano, A.F.; Olsen, S.C.; Kasischke, E.S. Continental-Scale Partitioning of Fire Emissions During the 1997 to 2001 El Niño/La Nina Period. Science 2004, 303, 73–76. [Google Scholar] [CrossRef] [Green Version]
- Voulgarakis, A.; Field, R.D. Fire Influences on Atmospheric Composition, Air Quality and Climate. Curr. Pollut. Rep. 2015, 1, 70–81. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zhao, J.; Xu, J.; Jia, M.; Li, H.; Wang, S. Influence of Straw Burning on Urban Air Pollutant Concentrations in Northeast China. Int. J. Environ. Res. Public Health 2019, 16, 1379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Davies, D.K.; Ilavajhala, S.; Wong, M.M.; Justice, C.O. Fire Information for Resource Management System: Archiving and Distributing MODIS Active Fire Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 72–79. [Google Scholar] [CrossRef]
- Yang, L.; Wang, J.; Gao, Y.H.; Zhang, Z.J.; Zhan, D.X. Application of remote sensing of FengYun-3 meteorological satellite in forestfire monitoring. Environ. Dev. 2019, 31, 129–131. [Google Scholar]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An Active-Fire Based Burned Area Mapping Algorithm for the MODIS Sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Jiang, Y.X.; Shen, Z.Q.; Li, S.; Zhao, X. Discussion on improving monitoring ability of forestfire in China using satellite system. Spacecr. Eng. 2019, 28, 96–100. [Google Scholar]
- Kant, Y.; Prasad, V.K.; Badarinath, K.V.S. Algorithm for detection of active fire zones using NOAA AVHRR data. Infrared Phys. Technol. 2000, 41, 29–34. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Justice, C.O.; Flynn, L.P.; Kendall, J.D.; Prins, E.M.; Giglio, L. Potential global fire monitoring from EOS-MODIS. J. Geophys. Res. 1998, 103, 32215–32238. [Google Scholar] [CrossRef]
- Dozier, J. A Method for Satellite Identification of Surface Temperature Fields of Subpixel Resolution. Remote Sens. Environ. 1981, 11, 221–229. [Google Scholar] [CrossRef]
- Giglio, L.; Kendall, J.D.; Justice, C.O. Evaluation of Global Fire Detection Using Simulated AVHRR Infrared Data. Int. J. Remote Sens. 1999, 20, 1947–1985. [Google Scholar] [CrossRef]
- Boles, S.H.; Verbyla, D.L. Comparison of Three AVHRR-Based Fire Detection Algorithms for Interior Alaska. Remote Sens. Environ. 2000, 72, 1–16. [Google Scholar] [CrossRef]
- Justice, C.O.; Giglio, L.; Korontzi, S.; Owens, J.; Morisette, J.T.; Roy, D.; Descloitres, J.; Alleaume, S.; Petitcolin, F.; Kaufman, Y. The MODIS Fire Products. Remote Sens. Environ. 2002, 83, 244–262. [Google Scholar] [CrossRef]
- Freeborn, P.H.; Wooster, M.J.; Roberts, G.; Malamud, B.D.; Xu, W. Development of a Virtual Active Fire Product for Africa Through a Synthesis of Geostationary and Polar Orbiting Satellite Data. Remote Sens. Environ. 2009, 113, 1700–1711. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, J.; Jian, H.; Fan, X.; Yan, F. Fire Diurnal Cycle Derived from a Combination of the Himawari-8 and VIIRS Satellites to Improve Fire Emission Assessments in Southeast Australia. Remote Sens. 2021, 13, 2852. [Google Scholar] [CrossRef]
- Li, F.; Zhang, X.; Kondragunta, S. Biomass Burning in Africa: An Investigation of Fire Radiative Power Missed by MODIS Using the 375 m VIIRS Active Fire Product. Remote Sens. 2020, 12, 1561. [Google Scholar] [CrossRef]
- Lasaponara, R.; Cuomo, V.; Macchiato, M.F.; Simoniello, T. A Self-Adaptive Algorithm Based on a VHRR Multitemporal Data Analysis for Small Active Fire Detection. Int. J. Remote Sens. 2003, 24, 1723–1749. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375m Active Fire Detection Data Product: Algorithm Description and Initial Assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Wang, W.; Qu, J.J.; Hao, X.; Liu, Y.; Sommers, W. An Improved Algorithm for Small and Cool Fire Detection Using MODIS Data: A Preliminary Study in the Southeastern United States. Remote Sens. Environ. 2007, 108, 163–170. [Google Scholar] [CrossRef]
- Martin, W.H.; Boyce, S.G. Introduction: The Southern Setting. In Biodiversity of the Southeastern United States Upland Terrestrial Commu-Nities; Martin, I.W.H., Boyce, S.G., Echternacht, A.C., Eds.; John Wiley: New York, NY, USA, 1993; pp. 1–46. [Google Scholar]
- Stanturf, J.A.; Wade, D.D.; Waldrop, T.A.; Kennard, D.K.; Achtemeier, G.L. Fire in Southern Forest Landscape. In Southern Forest Resource Assessment; Wear, D.N., Greis, J.G., Eds.; Gen. Tech. Rep. SRS-53; United States Department of Agriculture, Forest Service, Southern Research Station: Asheville, NC, USA, 2002; p. 635. [Google Scholar]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Wind, B.; Vadrevu, K.P. Active Fires from the Suomi NPP Visible Infrared Radiometer Suite: Product Status and First Evaluation Results. J. Geophys. Res. 2013, in press. [Google Scholar] [CrossRef]
- Goldberg, M.D.; Kilcoyne, H.; Cikanek, H.; Mehta, A. Joint Polar Satellite System: The United States next generation civilian polar-orbiting environmental satellite system. J. Geophys. Res. Atmos. 2013, 118, 13463–13475. [Google Scholar] [CrossRef]
- Cao, C.; de Luccia, F.J.; Xiong, X.; Wolfe, R.; Weng, F. Early on-orbit performance of the visible infrared imaging radiometer suite onboard the Suomi national polar-orbiting partnership (S-NPP) satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef] [Green Version]
- Wolfe, R.E.; Lin, G.; Nishihama, M.; Tewari, K.P.; Tilton, J.C.; Isaacman, A.R. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. Atmos. 2013, 118, 508–511. [Google Scholar] [CrossRef] [Green Version]
- Hutchison, K.D.; Iisager, B.D.; Mahoney, R.L. Enhanced Snow and Ice identificationwiththeVIIRScloudmaskalgorithm. Remote Sens. Lett. 2013, 4, 929–936. [Google Scholar] [CrossRef]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Iisager, B.D.; Brueske, K.; Reed, B. The VIIRS Cloud Mask: Progress in the First Year of S-NPP toward a Common Cloud Detection Scheme. J. Geophys. Res. Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]
- Stroppiana, D.; Pinnock, S.; Grégoire, J.-M. The Global Fire Product: Daily Fire Occurrence From April 1992 to December 1993 Derived From NOAA AVHRR Data. Int. J. Remote Sens. 2000, 21, 1279–1288. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel No. | Band Range (μm) | Dynamic Range (ρ OR K) |
|---|---|---|
| I4 | 3.55–3.93 | 180–367 |
| I5 | 10.5–12.4 | 180–380 |
| Algorithm | Season | Accuracy 1 | Omission Rate 2 | Error Rate 3 |
|---|---|---|---|---|
| Improved algorithm | summer | 53.85% | 46.15% | 36.36% |
| VIIRS fire products | 33.33% | 66.66% | 96.55% | |
| Improved algorithm | winter | 73.53% | 26.47% | 67.11% |
| VIIRS fire products | 56.71% | 43.28% | 64.48% |
| Point | Time | Position | Area (m2) | BT4 (K) | BT5 (K) | ΔBT45 (K) | ΔBT4 (K) | ΔBT5 (K) | ΔBT45’ (K) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2021.06.19 (04:42) | 117.03, 37.10 | 6500 | 345.12 | 309.59 | 35.52 | 17.04 | 7.41 | 9.62 |
| 2 | 2021.06.19 (05:36) | 118.49, 37.30 | 6400 | 336.82 | 306.51 | 30.30 | 21.67 | 1.41 | 20.25 |
| 3 | 116.22, 37.09 | 10,000 | 342.23 | 302.29 | 39.94 | 27.16 | 1.67 | 25.48 | |
| 4 | 116.11, 36.63 | 19,000 | 343.49 | 309.19 | 34.29 | 23.95 | 3.19 | 20.75 | |
| 5 | 2021.06.20 (05:18) | 118.15, 35.23 | 10,000 | 357.88 | 300.83 | 57.05 | 35.21 | 2.91 | 32.29 |
| 6 | 2021.06.19 (04:42) | 118.65, 35.28 | 7000 | 357.88 | 300.83 | 57.05 | 35.21 | 2.91 | 32.29 |
| Point | Time | Position | Area (m2) | BT4 (K) | BT5 (K) | ΔBT45 (K) | ΔBT4 (K) | ΔBT5 (K) | ΔBT45’ (K) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2020.10.07 (04:24) | 117.32, 36.95 | 13,000 | 342.46 | 299.83 | 42.63 | 35.13 | 2.93 | 32.19 |
| 2 | 116.02, 35.71 | 1300 | 339.1492 | 298.66 | 40.48 | 25.25 | 0.64 | 24.61 | |
| 3 | 117.27, 35.84 | 10,000 | 331.0194 | 293.86 | 37.15 | 24.38 | 1.19 | 23.19 | |
| 4 | 2020.12.15 (06:12) | 116.93, 37.81 | 1400 | 329.0843 | 277.27 | 51.81 | 39.46 | 5.09 | 37.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Sun, L.; Sun, Z.; Qu, Y. Detecting Low-Intensity Fires in East Asia Using VIIRS Data: An Improved Contextual Algorithm. Remote Sens. 2021, 13, 4226. https://doi.org/10.3390/rs13214226
Zhang N, Sun L, Sun Z, Qu Y. Detecting Low-Intensity Fires in East Asia Using VIIRS Data: An Improved Contextual Algorithm. Remote Sensing. 2021; 13(21):4226. https://doi.org/10.3390/rs13214226
Chicago/Turabian StyleZhang, Ning, Lin Sun, Zhendong Sun, and Yu Qu. 2021. "Detecting Low-Intensity Fires in East Asia Using VIIRS Data: An Improved Contextual Algorithm" Remote Sensing 13, no. 21: 4226. https://doi.org/10.3390/rs13214226
APA StyleZhang, N., Sun, L., Sun, Z., & Qu, Y. (2021). Detecting Low-Intensity Fires in East Asia Using VIIRS Data: An Improved Contextual Algorithm. Remote Sensing, 13(21), 4226. https://doi.org/10.3390/rs13214226