
Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island


Abstract
:1. Introduction
2. Methods and Data Processing
2.1. GNSS Data Processing
2.2. Principal Component Analysis
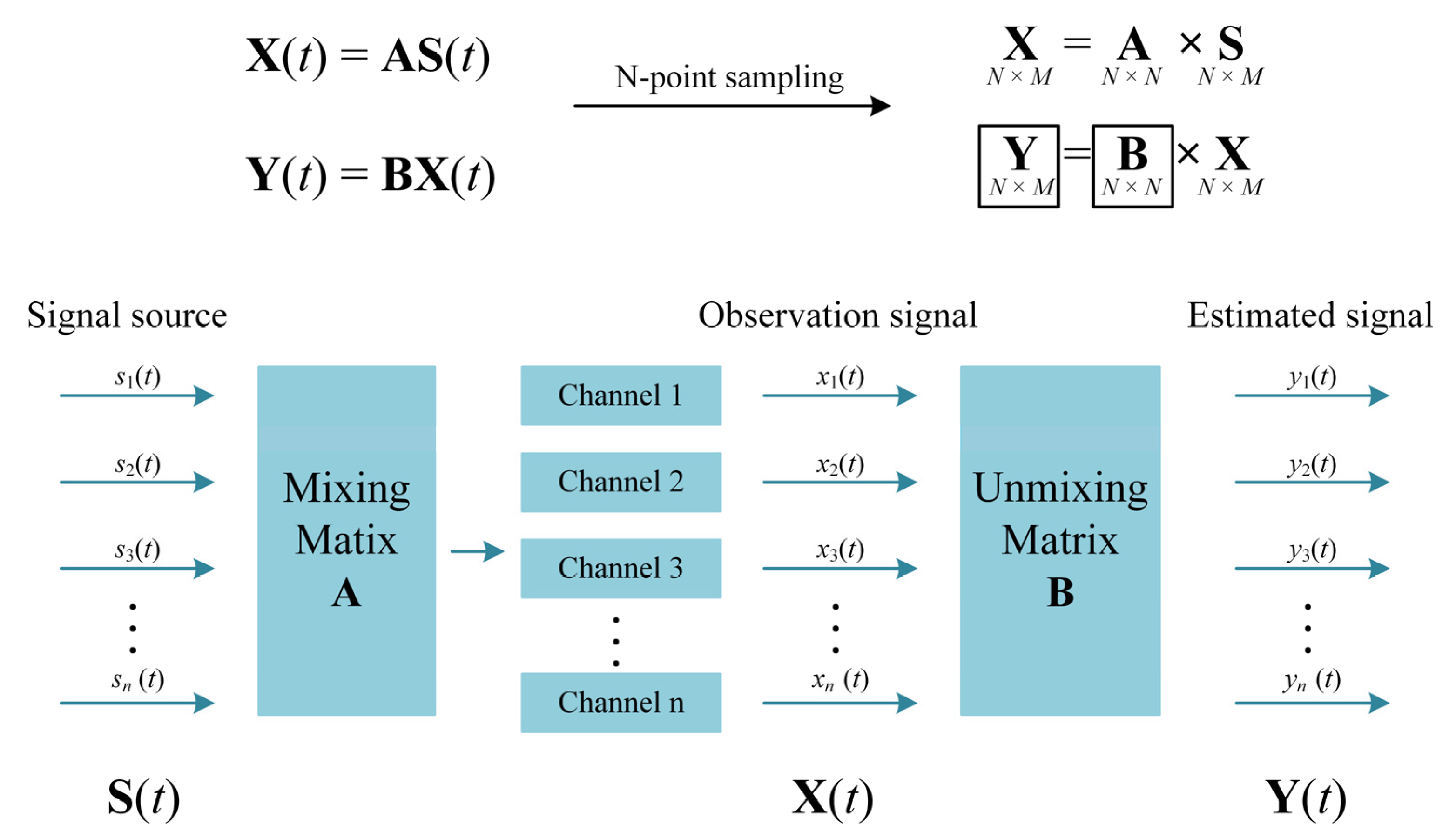
2.3. Independent Component Analysis
- Centralize and whiten the observed data.
- Choose an initial weight vector of unit norm .
- Update through .
- Normalize by .
- Return to step 3 if is not converged.
3. Results
3.1. Common Mode Error Extraction Using PCA/ICA
3.2. Noise Analysis of GNSS Coordinate Time Series
4. Discussion
4.1. Potential Geophysical Interpretation of the CME
4.2. Effect of Removing the CME
5. Conclusions
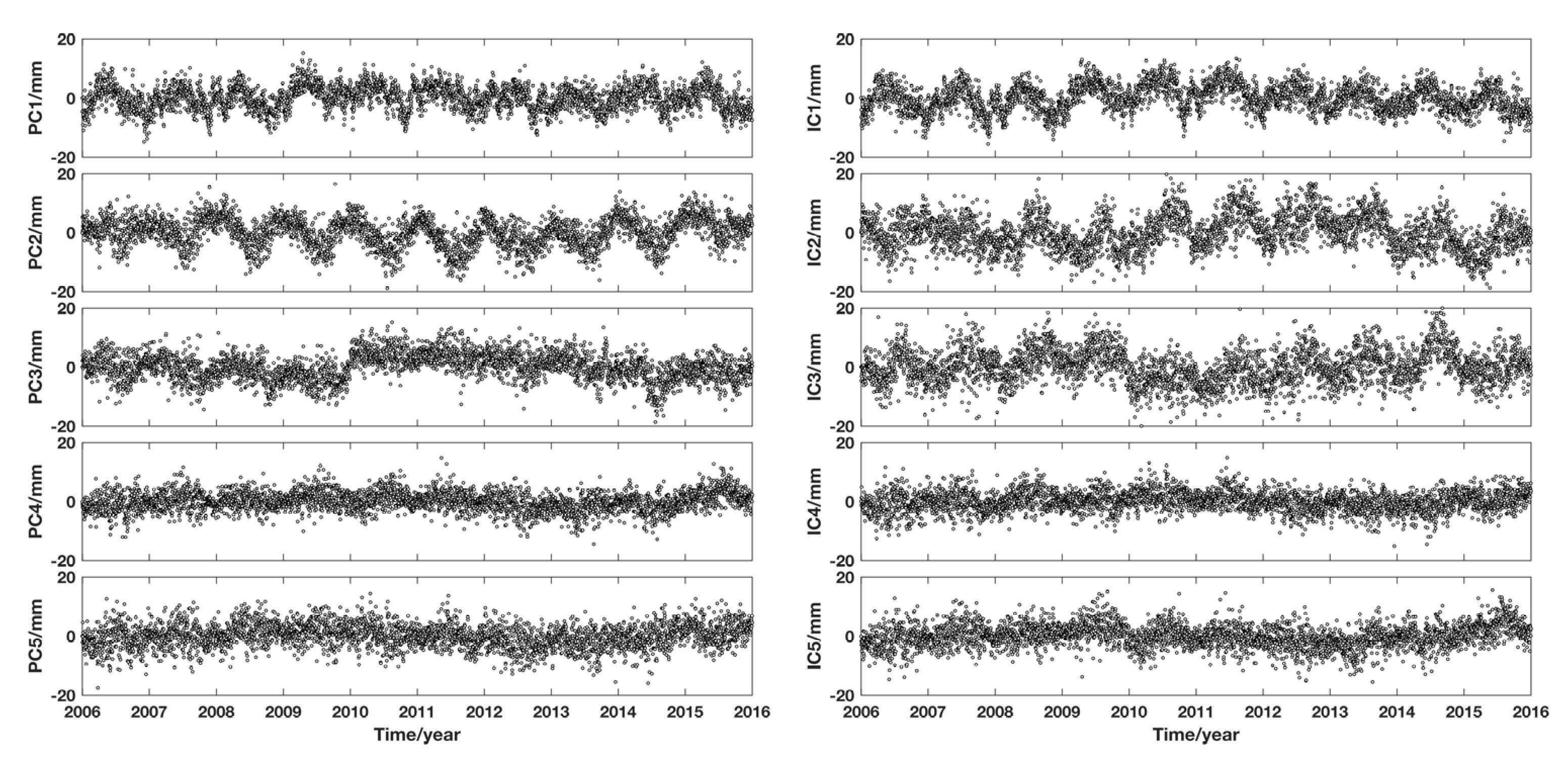
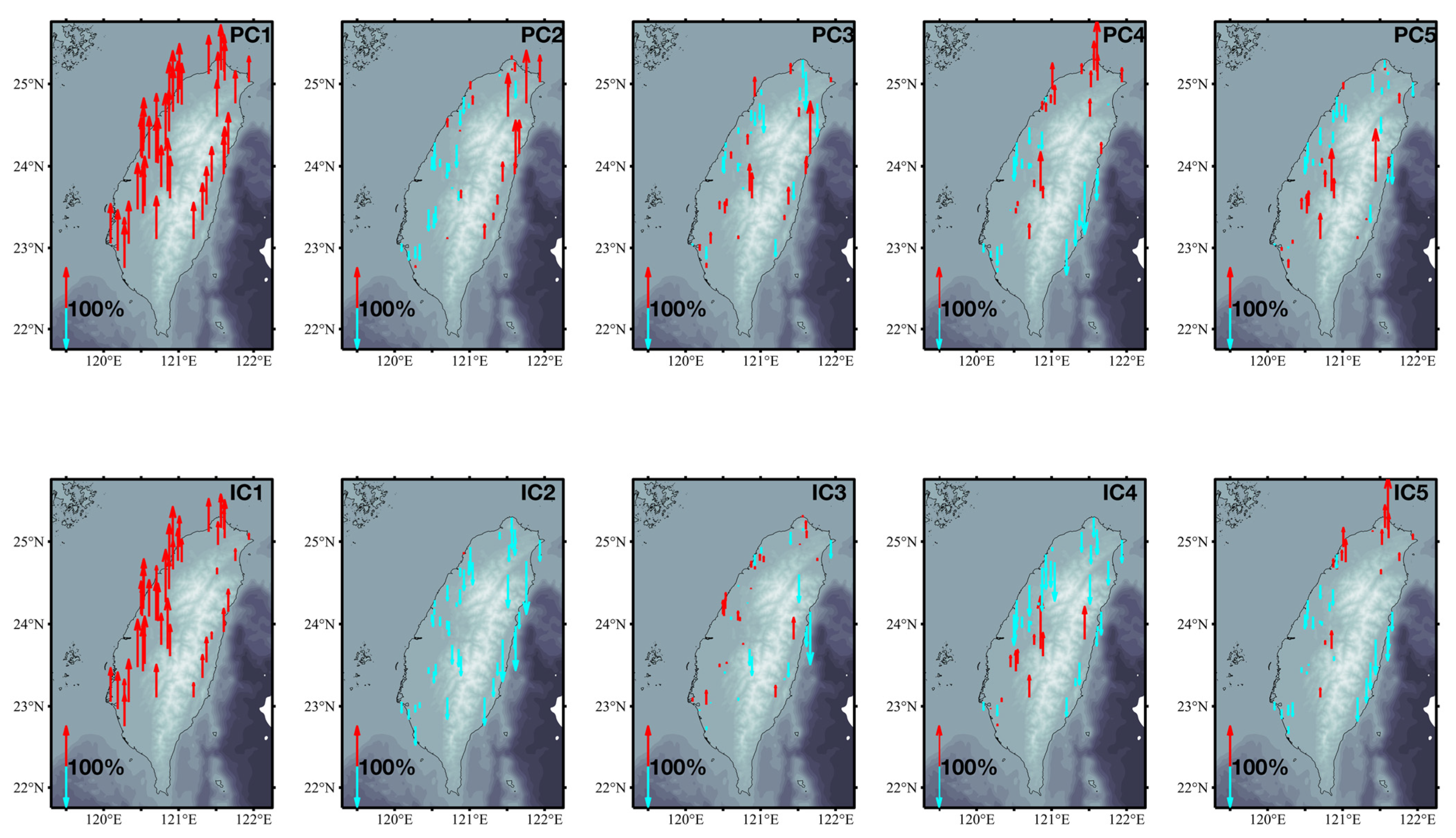
- Both PCA and ICA can effectively remove the CME. The average RMS of PCA and ICA in the U direction shifted from 6.47 mm to 5.58 mm and 5.40 mm, respectively, a decreased by approximately 14% and 17%. However, the CMEs of the two approaches reveal notable differences in their temporal and spatial characteristics. Figure 6 shows that the PCA separates only one CME and the ICA separates two CMEs. We therefore believe that PCA may eliminate the original site information, whereas ICA retains more original site information.
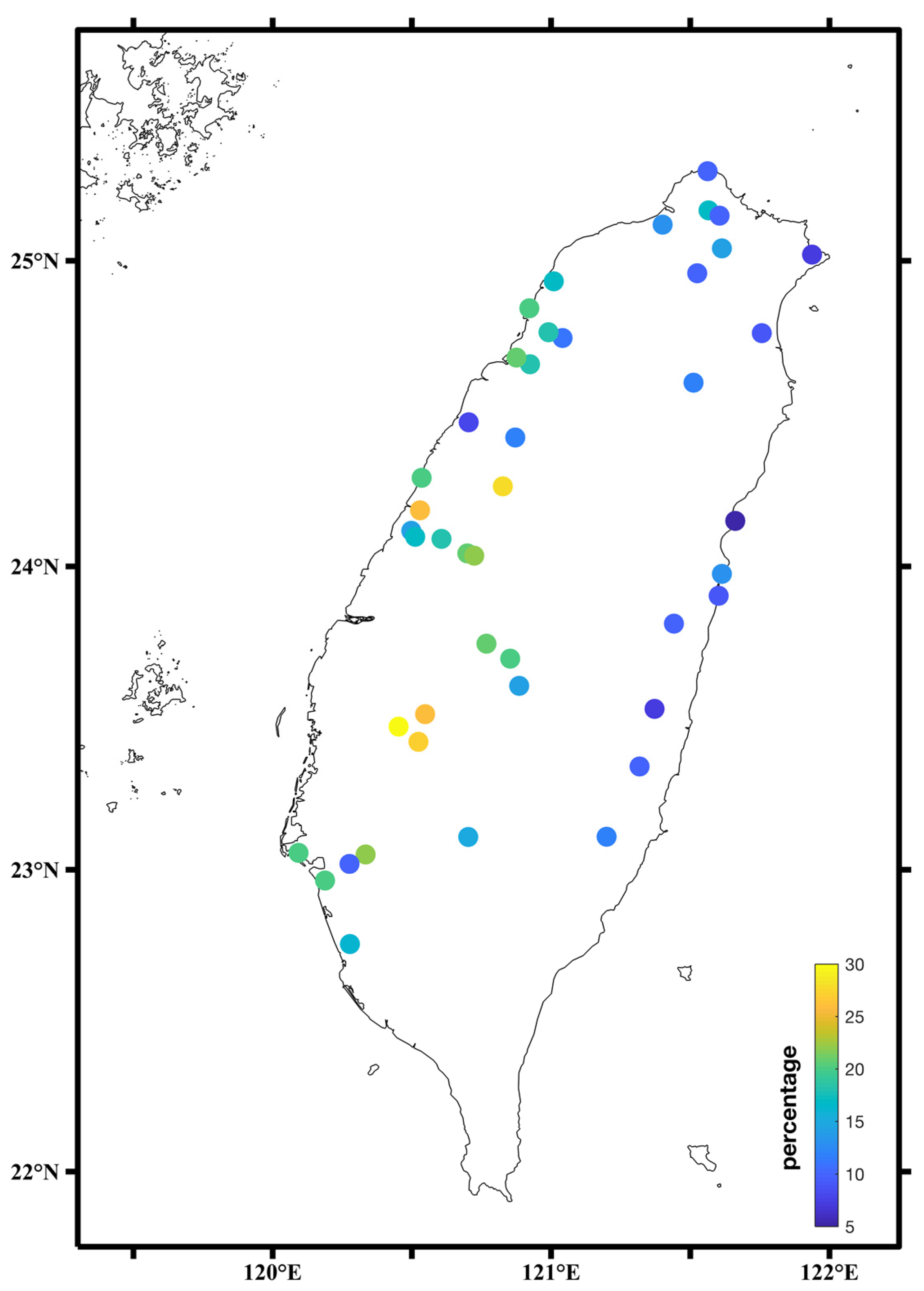
- There are notable differences in the ICA filtering effect between the east and west of Taiwan. The RMS reduction rate in the west is relatively large, whereas that in the east small, which is partially due to topography. There are many mountains on the eastern side of Taiwan and the stations are sparsely distributed, whereas the western side is relatively flat and the stations are relatively dense. Another explanation is the orogenic processes, as there is a topographic uplift in the eastern region and sinking in the southwest region due to groundwater extraction.
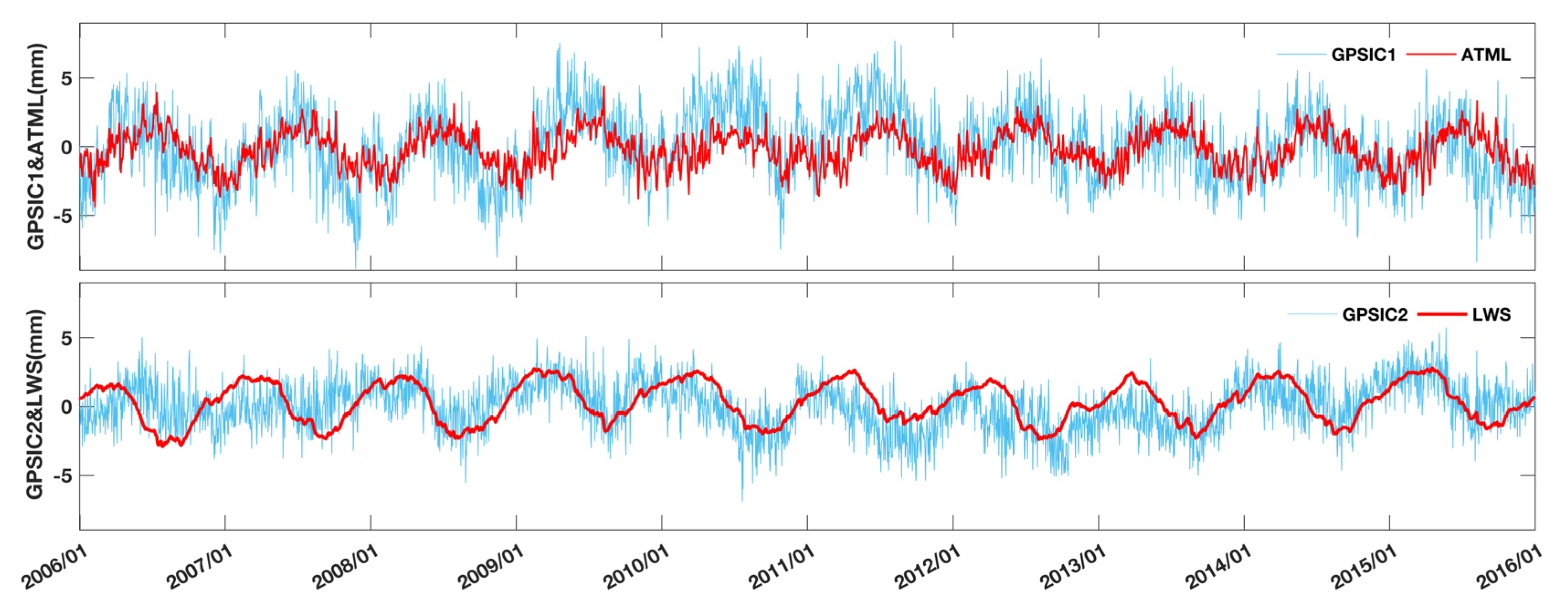
- To explore the possible geophysical sources of ICA’s CMEs, we compare the CMEs of ICA with the predicted average loading displacements caused by changes in the atmospheric and hydrological loadings. It is found that GPS_IC1 and ATML, and GPS_IC2 and LWS are consistent in terms of amplitude and characteristics. The correlation between GPS_IC1 and ATML is 0.55, and the correlation coefficient between GPS_IC2 and LWS is 0.40. This indicates that seasonal changes in Taiwan are related to the movement of water in addition to atmospheric pressure.
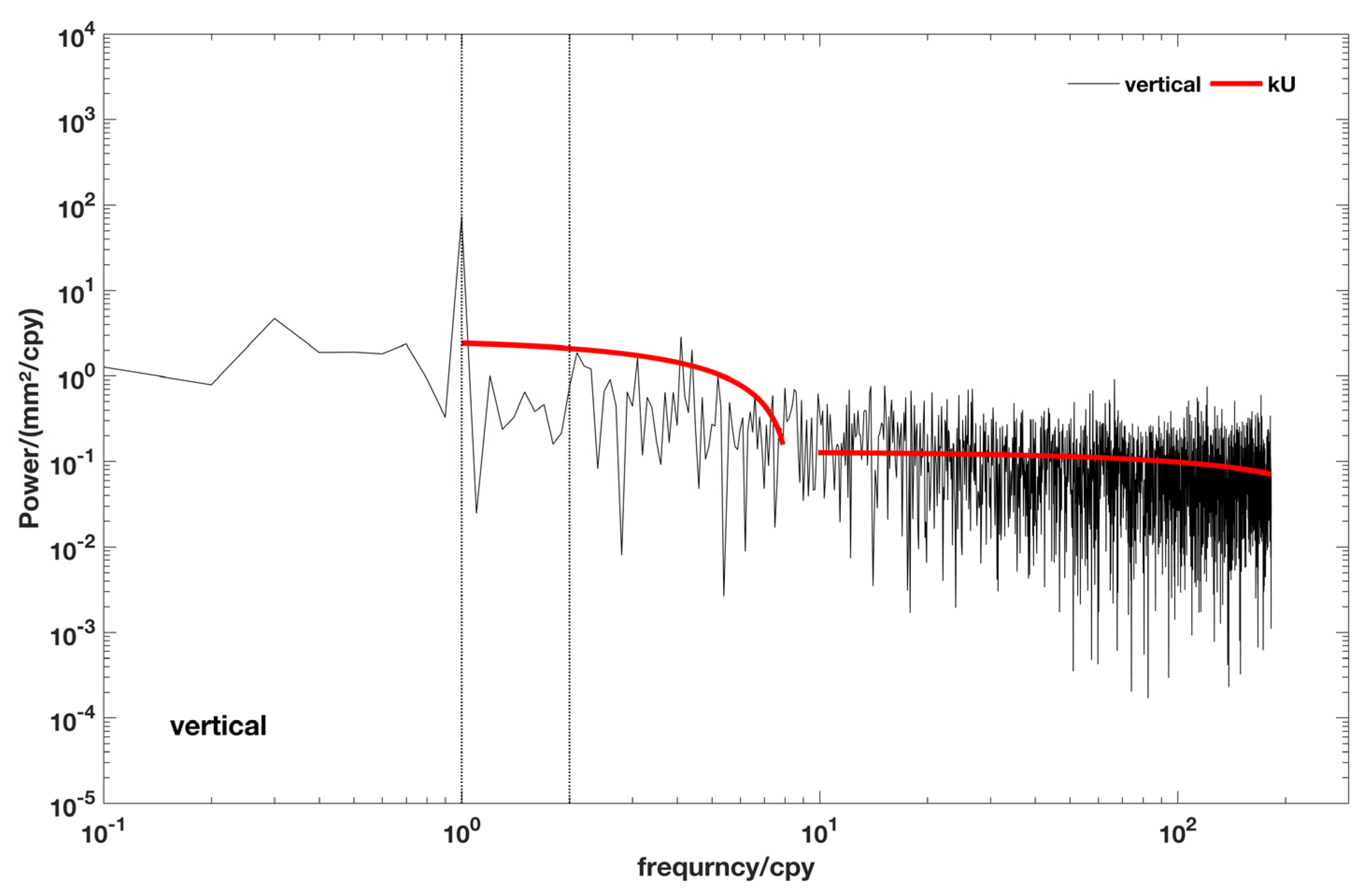
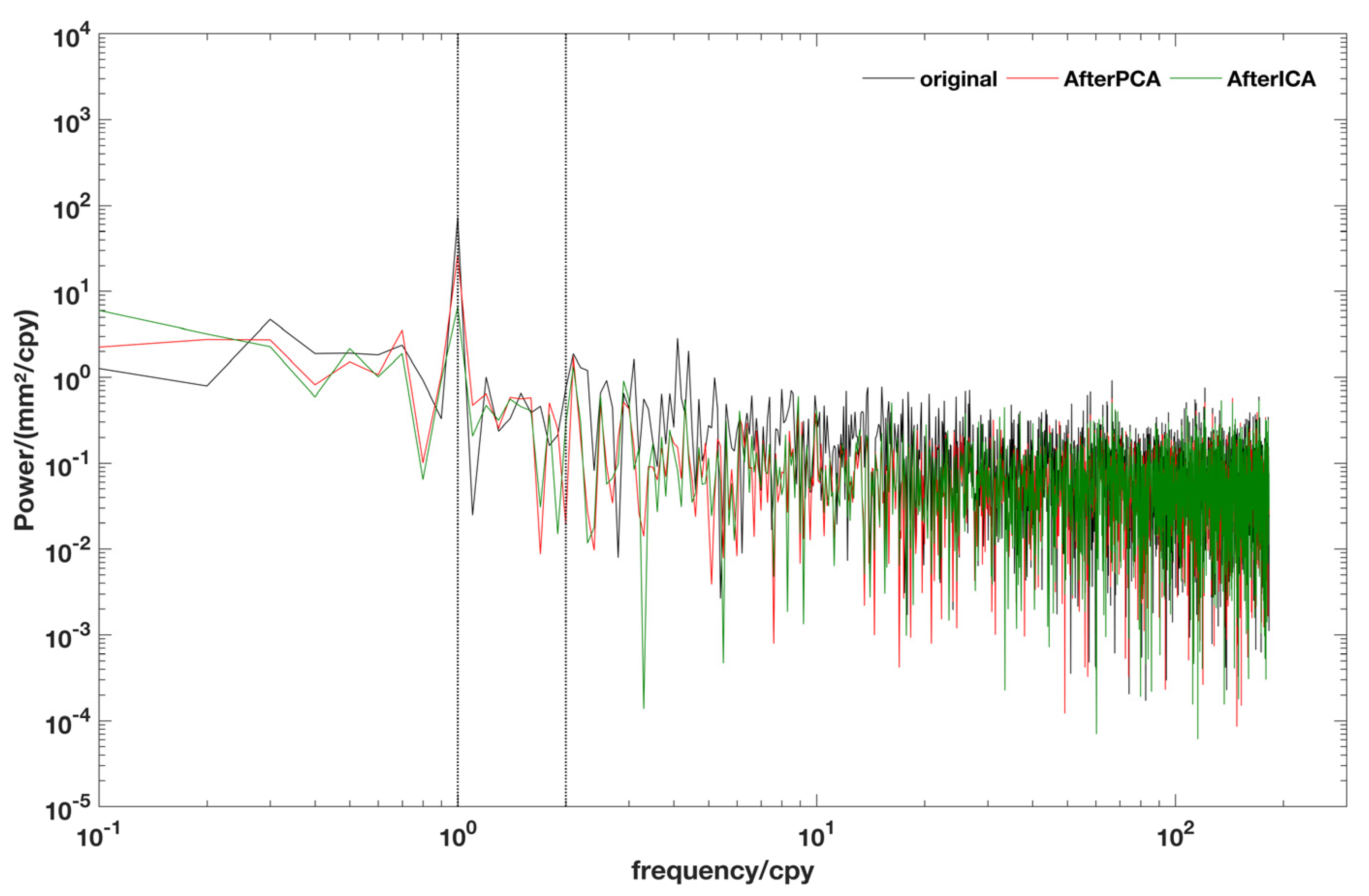
- We used Hector software to analyze the noise characteristics of the time series of all stations prior to filtering. The average spectral index shifted from -0.72 to -0.92, which indicates that the most suitable noise model in Taiwan is W + FN. Filtering can also effectively reduce PL noise. After filtering, PL noise is reduced by an average of approximately 28%. The average annual cycle item is also significantly reduced by approximately 60%. ICA filtration is more advantageous than PCA filtration. The noise sequence filtered by ICA and PCA at the GS39 station was analyzed to verify the above conclusions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bock, Y.; Melgar, D. Physical applications of GPS geodesy: A review. Rep. Prog. Phys. 2016, 79, 106801. [Google Scholar] [CrossRef]
- He, X.; Montillet, J.P.; Fernandes, R.; Bos, M.; Yu, K.; Hua, X.; Jiang, W. Review of current GPS methodologies for producing accurate time series and their error sources. J. Geodyn. 2017, 106, 12–29. [Google Scholar] [CrossRef]
- Li, Z.; Jiang, W.; Liu, H. Noise Model Establishment and Analysis of IGS Reference Station Coordinate Time Series inside China. Acta Geod. Cartogr. Sin. 2012, 41, 496–503. [Google Scholar]
- Huang, L. Noise properties in time series of coordinate component at gps fiducial stations. J. Geod. Geodyn. 2006, 26, 31–34. [Google Scholar]
- Mao, A.; Harrison, C.G.A.; Dixon, T.H. Noise in GPS coordinate time series. J. Geophys. Res. 1999, 104, 2797–2816. [Google Scholar] [CrossRef] [Green Version]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California permanent GPS geodetic array: Spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 Landers earthquake. J. Geophys. Res. Solid Earth 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111, B03405. [Google Scholar] [CrossRef] [Green Version]
- Gruszczynski, M.; Klos, A.; Bogusz, J. A Filtering of Incomplete GNSS Position Time Series with Probabilistic Principal Component Analysis. Pure. Appl. Geophys. 2018, 175, 1841–1867. [Google Scholar] [CrossRef]
- King, M.A.; Altamimi, Z.; Boehm, J.; Bos, M.; Dach, R.; Elosegui, P.; Fund, F.; Hernández-Pajares, M.; Lavallee, D.; Cerveira, P.J.M. Improved constraints on models of glacial isostatic adjustment: A review of the contribution of ground-based geodetic observations. Surv. Geophys. 2010, 31, 465–507. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhou, X.; Deng, L.; Wang, K.; Zhou, B. Quantitative analysis of geophysical sources of common mode component in CMONOC GPS coordinate time series. Adv. Space Res. 2017, 60, 2896–2909. [Google Scholar] [CrossRef]
- Bogusz, J.; Gruszczynski, M.; Figurski, M.; Klos, A. Spatio-temporal filtering for determination of common mode error in regional GNSS networks. Open Geosci. 2015, 7, 140–148. [Google Scholar] [CrossRef] [Green Version]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System. Ph.D. Thesis, University of California, San Diego, CA, USA, 2002. [Google Scholar]
- Márquez-Azúa, B.; DeMets, C. Crustal velocity field of Mexico from continuous GPS measurements, 1993 to June 2001: Implications for the neotectonics of Mexico. J. Geophys. Res. Solid Earth 2003, 108, 2450. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109, B03412. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Shen, Z.-K. Extracting the regional common-mode component of GPS station position time series from dense continuous network. J. Geophys. Res. Solid Earth 2016, 121, 1080–1096. [Google Scholar] [CrossRef]
- Serpelloni, E.; Faccenna, C.; Spada, G.; Dong, D.; Williams, S.D.P. Vertical GPS ground motion rates in the Euro-Mediterranean region: New evidence of velocity gradients at different spatial scales along the Nubia-Eurasia plate boundary. J. Geophys. Res. Solid Earth 2013, 118, 6003–6024. [Google Scholar] [CrossRef] [Green Version]
- He, X.; Hua, X.; Yu, K.; Xuan, W.; Lu, T.; Zhang, W.; Chen, X. Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering. Adv. Space Res. 2015, 55, 1316–1327. [Google Scholar] [CrossRef]
- Liu, B.; Dai, W.; Peng, W.; Meng, X. Spatiotemporal analysis of GPS time series in vertical direction using independent component analysis. Earth Planets Space 2015, 67, 189. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Dai, W.; Liu, N. Extracting seasonal deformations of the Nepal Himalaya region from vertical GPS position time series using Independent Component Analysis. Adv. Space Res. 2017, 60, 2910–2917. [Google Scholar] [CrossRef]
- Li, W.; Shen, Y. The Consideration of Formal Errors in Spatiotemporal Filtering Using Principal Component Analysis for Regional GNSS Position Time Series. Remote Sens. 2018, 10, 534. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.; Chen, J.; Dong, D.; Qu, W.; Xu, X. Analysis of the Potential Contributors to Common Mode Error in Chuandian Region of China. Remote. Sens. 2020, 12, 751. [Google Scholar] [CrossRef] [Green Version]
- Yuan, L.G.; Dong, X.; Chen, W.; Guo, Z.; Chen, S.; Hong, B.; Zhou, J. Characteristics of daily position time series from the Hong Kong GPS fiducial network. Chin. J. Geophys. 2008, 51, 1372–1384. [Google Scholar] [CrossRef]
- Shen, Y.; Li, W.; Xu, G.; Li, B. Spatiotemporal filtering of regional GNSS network’s position time series with missing data using principle component analysis. J. Geod. 2014, 88, 1–12. [Google Scholar] [CrossRef]
- Li, W.; Shen, Y.; Li, B. Weighted spatiotemporal filtering using principal component analysis for analyzing regional GNSS position time series. Acta Geod. Geophys. 2015, 50, 419–436. [Google Scholar] [CrossRef] [Green Version]
- Kreemer, C.; Blewitt, G. Robust estimation of spatially varying common-mode components in GPS time-series. J. Geod. 2021, 95, 1–19. [Google Scholar] [CrossRef]
- Liu, B.; King, M.; Dai, W. Common mode error in Antarctic GPS coordinate time-series on its effect on bedrock-uplift estimates. Geophys. J. Int. 2018, 214, 1652–1664. [Google Scholar] [CrossRef]
- Zhou, M.; Guo, J.; Liu, X.; Shen, Y.; Zhao, C. Crustal movement derived by GNSS technique considering common mode error with MSSA. Adv. Space Res. 2020, 66, 1819–1828. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, R.; Ding, H.; Xu, X.; Zheng, G.; Shen, W.; Xiao, Y.; Li, S. Common Mode Component and Its Potential Effect on GPS-Inferred Three-Dimensional Crustal Deformations in the Eastern Tibetan Plateau. Remote. Sens. 2019, 11, 1975. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.; Dong, D.; Burgmann, R.; Materna, K.; Tan, W.; Peng, Y.; Chen, J. Separation of Sources of Seasonal Uplift in China Using Independent Component Analysis of GNSS Time Series. J. Geophys. Res. Solid Earth 2019, 124, 11951–11971. [Google Scholar] [CrossRef]
- Gualandi, A.; Serpelloni, E.; Belardinelli, M.E. Blind source separation problem in GPS time series. J. Geod. 2016, 90, 323–341. [Google Scholar] [CrossRef]
- Gualandi, A.; Avouac, J.P.; Galetzka, J.; Genrich, J.F.; Blewitt, G.; Adhikari, L.B.; Koirala, B.P.; Gupta, R.; Upreti, B.N.; Pratt-Sitaula, B.J.T. Pre-and post-seismic deformation related to the 2015, Mw7. 8 Gorkha earthquake, Nepal. Tectonophysics 2017, 714, 90–106. [Google Scholar] [CrossRef]
- Bian, Y.; Yue, J.; Ferreira, V.G.; Cong, K.; Cai, D. Common Mode Component and Its Potential Effect on GPS-Inferred Crustal Deformations in Greenland. Pure. Appl. Geophys. 2021, 178, 1805–1823. [Google Scholar] [CrossRef]
- Deng, L.; Chen, H.; Ren, J.; Liao, Y. Long-term and seasonal displacements inferred from the regional GPS coordinate time series: Case study in Central China Hefei City. Earth Sci. Inform. 2020, 13, 71–81. [Google Scholar] [CrossRef]
- An, J.; Zhang, B.; Ai, S.; Wang, Z.; Feng, Y. Evaluation of vertical crustal movements and sea level changes around Greenland from GPS and tide gauge observations. Acta Oceanol. Sin. 2021, 40, 4–12. [Google Scholar] [CrossRef]
- Zhang, T.; Shen, W.; Pan, Y.; Luan, W. Study of seasonal and long-term vertical deformation in Nepal based on GPS and GRACE observations. Adv. Space Res. 2018, 61, 1005–1016. [Google Scholar] [CrossRef]
- Ma, C.; Li, F.; Zhang, S.; Lei, J.; Dong-Chen, E.; Hao, W.; Zhang, Q. The coordinate time series analysis of continuous GPS stations in the Antarctic Peninsula with consideration of common mode error. Chin. J. Geophys. 2016, 59, 2783–2795. [Google Scholar]
- Zhang, K.; Wang, Y.; Gan, W.; Liang, S. Impacts of Local Effects and Surface Loads on the Common Mode Error Filtering in Continuous GPS Measurements in the Northwest of Yunnan Province, China. Sensors 2020, 20, 5408. [Google Scholar] [CrossRef]
- Ming, F.; Yang, Y.; Zeng, A.; Zhao, B. Spatiotemporal filtering for regional GPS network in China using independent component analysis. J. Geod. 2017, 91, 419–440. [Google Scholar] [CrossRef]
- Kumar, U.; Chao, B.F.; Chang, E.T.Y. What Causes the Common-Mode Error in Array GPS Displacement Fields: Case Study for Taiwan in Relation to Atmospheric Mass Loading. Earth Space Sci. 2020, 7, e2020EA001159. [Google Scholar] [CrossRef]
- Yu, S.; Chen, H.; Kuo, L. Velocity field of GPS stations in the Taiwan area. Tectonophysics 1997, 274, 41–59. [Google Scholar] [CrossRef]
- Yu, S.; Hsu, Y.; Kuo, L.; Chen, H.; Liu, C. GPS measurement of postseismic deformation following the 1999 Chi-Chi, Taiwan, earthquake. J. Geophys. Res. 2003, 108, 2520–2539. [Google Scholar] [CrossRef] [Green Version]
- Yi-Ben, T. Seismotectonics of Taiwan. Tectonophysics 1986, 125, 17–37. [Google Scholar] [CrossRef]
- Comon, P. Independent component analysis, a new concept? Signal. Process. 1994, 36, 287–314. [Google Scholar] [CrossRef]
- Comon, P.; Jutten, C.; Herault, J. Blind separation of sources, Part II: Problems statement. Signal. Process. 1991, 24, 11–20. [Google Scholar] [CrossRef]
- Herault, J.; Jutten, C. Space or time adaptive signal processing by neural network models. Am. Inst. Phys. 1986, 151, 206–211. [Google Scholar]
- Jutten, C.; Herault, J. Blind separation of sources, part I: An adaptive algorithm based on neuromimetic architecture. Signal. Process. 1991, 24, 1–10. [Google Scholar] [CrossRef]
- Gazeaux, J.; Williams, S.; King, M.; Bos, M.; Dach, R.; Deo, M.; Moore, A.; Ostini, L.; Petrie, E.; Roggero, M.; et al. Detecting offsets in GPS time series: First results from the detection of offsets in GPS experiment. J. Geophys. Res. Solid Earth 2013, 118, 2397–2407. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Qiao, X.; Wang, D.; Chen, Z.; Yu, P.; Lin, M.; Chen, W. Spatiotemporal noise in GPS position time-series from Crustal Movement Observation Network of China. Geophys. J. Int. 2019, 216, 1560–1577. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, P.; Sun, Z.; Zhang, Q.; Liu, J. Analysis the Influence of Modulated Amplitude on Common Mode Error Based on GPS Data. ISPRS-Int. Arch. Photogramm. Remote. Sesing Spat. Inf. Sci. 2021, 43, 153–158. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhou, X.; Liu, J. Noise analysis of common mode error in CMONOC GPS coordinate time series. In Proceedings of the 2017 Forum on Cooperative Positioning and Service (CPGPS), Harbin, China, 19–21 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 190–193. [Google Scholar]
- Klos, A.; Olivares, G.; Teferle, F.N.; Hunegnaw, A.; Bogusz, J. On the combined effect of periodic signals and colored noise on velocity uncertainties. Gps Solut. 2017, 22, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Ma, J.; Li, Z.; Zhou, X.; Zhou, B. Effect of removing the common mode errors on linear regression analysis of noise amplitudes in position time series of a regional GPS network & a case study of GPS stations in Southern California. Adv. Space Res. 2018, 61, 2521–2530. [Google Scholar]
- He, X.; Bos, M.S.; Montillet, J.P.; Fernandes, R.M.S. Investigation of the noise properties at low frequencies in long GNSS time series. J. Geod. 2019, 93, 1271–1282. [Google Scholar] [CrossRef]
- Santamaría-Gómez, A.; Ray, J. Chameleonic Noise in GPS Position Time Series. J. Geophys. Res. Solid Earth 2021, 126, e2020JB019541. [Google Scholar] [CrossRef]
- Dong, D.; Chen, J.; Wang, J. The GNSS High. Precision Positioning Principle; Science Press: Beijing, China, 2018; pp. 253–260. [Google Scholar]
- Hyvärinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hyvärinen, A.; Oja, E. A fast fixed-point algorithm for independent component analysis. Neural Comput. 1997, 9, 1483–1492. [Google Scholar] [CrossRef]
- Bell, A.; Sejnowski, T. An information-maximization approach to blind separation and blind deconvolution. Neural Comput. 1995, 7, 1129–1159. [Google Scholar] [CrossRef]
- Yang, F.; Hong, B. Theory and Application of Independent Component Analysis; Tsinghua University Press: Beijing, China, 2006. [Google Scholar]
- Hyvärinen, A.; Oja, E. Independent component analysis: Algorithms and applications. Neural Comput. 2000, 13, 411–430. [Google Scholar] [CrossRef] [Green Version]
- Barnie, T.; Oppenheimer, C. Extracting high temperature event radiance from satellite images and correcting for saturation using independent component analysis. Remote. Sens. Env. 2015, 158, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Milliner, C.; Materna, K.; Burgmann, R.; Fu, Y.; Moore, A.; Bekaert, D.; Adhikari, S.; Argus, D. Tracking the weight of Hurricane Harvey’s stormwater using GPS data. Sci. Adv. 2018, 4, eaau2477. [Google Scholar] [CrossRef] [Green Version]
- Hsu, Y.; Lai, Y.; You, R.; Chen, H.; Teng, L.; Tsai, Y.; Tang, C.; Su, H. Detecting rock uplift across southern Taiwan mountain belt by integrated GPS and leveling data. Tectonophysics 2018, 744, 275–284. [Google Scholar] [CrossRef]
- Hu, J.; Chu, H.; Hou, C.; Lai, T.; Chen, R.; Nien, P. The contribution to tectonic subsidence by groundwater abstraction in the Pingtung area, southwestern Taiwan as determined by GPS measurements. Quat. Int. 2006, 147, 62–69. [Google Scholar] [CrossRef]
- Dobslaw, H.; Bergmann-Wolf, I.; Dill, R.; Poropat, L.; Thomas, M.; Dahle, C.; Esselborn, S.; Koenig, R.; Flechtner, F. A new high-resolution model of non-tidal atmosphere and ocean mass variability for de-aliasing of satellite gravity observations: AOD1B RL06. Geophys. J. Int. 2017, 211, 263–269. [Google Scholar] [CrossRef] [Green Version]
- Petrov, L. The International Mass Loading Service. In REFAG 2014; Springer: Cham, Switzerland, 2015; pp. 79–83. [Google Scholar]
- Petrov, L.; Boy, J. Study of the atmospheric pressure loading signal in very long baseline interferometry observations. J. Geophys. Res. 2004, 109, 409. [Google Scholar] [CrossRef] [Green Version]
- Rienecker, M.; Suarez, M.; Todling, R.; Bacmeister, J.; Takacs, L.; Liu, H.; Gu, W.; Sienkiewicz, M.; Koster, R.; Gelaro, R. The GEOS-5 Data Assimilation System: Documentation of Versions 5.0. 1, 5.1. 0, and 5.2. 0; Technical Report Series on Global Modeling and Data Assimilation Volume 27; NASA: Washington, DC, USA, December 2008.
- Bos, M.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Rao, R. Noise in GPS coordinate time series II. Compilation by the Central Weather Bureau of the Ministry of Communications. 2014; Volume 64, pp. 281–327. Available online: https://scweb.cwb.gov.tw/Uploads/Reports/MOTC-CWB-103-E-04.pdf (accessed on 2 August 2021). (In Chinese)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of PCs | Individual Contribution Rate (%) | Cumulative Contribution Rate (%) |
|---|---|---|
| 1 | 24.7 | 24.7 |
| 2 | 6.5 | 31.2 |
| 3 | 4.6 | 35.8 |
| 4 | 3.7 | 39.5 |
| 5 | 3.6 | 43.1 |
| 6 | 3.0 | 46.1 |
| 7 | 2.7 | 48.8 |
| 8 | 2.5 | 51.3 |
| 9 | 2.4 | 53.7 |
| 10 | 2.3 | 56.0 |
| Method | RMS/mm | |
|---|---|---|
| Before | 6.47 | |
| After | PCA | 5.58 |
| ICA | 5.40 |
| Sites | Annual Amplitude (mm) | Semi-Annual (mm) | PL Amplitude | WN Amplitude | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Before | After | Before | After | Before | After | Before | After | Before | After | |
| ‘ANKN’ | 1.23 ± 0.33 | 0.70 ± 0.25 | 0.55 ± 0.25 | 0.50 ± 0.21 | 10.32 | 8.07 | 4.08 | 4.13 | −0.47 | −0.37 |
| ‘CHKU’ | 2.41 ± 0.31 | 0.40 ± 0.19 | 0.60 ± 0.23 | 0.39 ± 0.15 | 8.63 | 4.94 | 3.50 | 4.00 | −0.67 | −0.93 |
| ‘CHNT’ | 3.80 ± 0.83 | 2.80 ± 0.80 | 0.88 ± 0.45 | 0.77 ± 0.40 | 20.32 | 19.12 | 6.17 | 6.40 | −0.98 | −1.05 |
| ‘CLAN’ | 4.30 ± 1.00 | 2.39 ± 0.94 | 1.58 ± 0.65 | 1.35 ± 0.60 | 24.21 | 23.04 | 6.09 | 6.23 | −1.01 | −1.10 |
| ‘CTOU’ | 2.54 ± 0.45 | 0.67 ± 0.31 | 0.53 ± 0.26 | 0.59 ± 0.24 | 11.60 | 8.14 | 4.90 | 5.24 | −0.85 | −1.02 |
| ‘CWEN’ | 3.41 ± 0.37 | 0.69 ± 0.20 | 0.55 ± 0.25 | 0.44 ± 0.16 | 9.99 | 5.37 | 3.88 | 3.75 | −0.73 | −0.65 |
| ‘DAHU’ | 2.63 ± 0.45 | 1.58 ± 0.38 | 0.48 ± 0.25 | 0.50 ± 0.24 | 12.19 | 9.52 | 4.24 | 4.73 | −0.75 | −0.89 |
| ‘DOSH’ | 3.90 ± 0.38 | 0.36 ± 0.18 | 0.40 ± 0.21 | 0.35 ± 0.15 | 10.94 | 5.36 | 3.80 | 4.52 | −0.64 | −0.68 |
| ‘FLON’ | 2.76 ± 0.46 | 1.64 ± 0.42 | 1.58 ± 0.39 | 1.33 ± 0.36 | 15.33 | 14.31 | 0.00 | 0.01 | −0.45 | −0.43 |
| ‘FNGU’ | 2.76 ± 0.37 | 0.44 ± 0.21 | 0.85 ± 0.27 | 0.64 ± 0.17 | 9.52 | 4.60 | 4.26 | 4.40 | −0.82 | −1.25 |
| ‘GS15’ | 2.90 ± 0.29 | 0.91 ± 0.20 | 0.40 ± 0.19 | 0.31 ± 0.13 | 8.37 | 3.90 | 3.54 | 4.32 | −0.60 | −1.19 |
| ‘GS16’ | 2.18 ± 0.45 | 0.67 ± 0.31 | 0.63 ± 0.30 | 0.42 ± 0.21 | 12.38 | 9.58 | 5.43 | 5.57 | −0.73 | −0.70 |
| ‘GS21’ | 2.03 ± 0.36 | 0.82 ± 0.25 | 0.58 ± 0.24 | 0.37 ± 0.15 | 8.48 | 4.36 | 3.95 | 3.84 | −0.94 | −1.47 |
| ‘GS22’ | 2.63 ± 0.43 | 1.72 ± 0.33 | 0.49 ± 0.25 | 0.43 ± 0.20 | 10.89 | 7.58 | 3.73 | 4.00 | −0.85 | −0.99 |
| ‘GS31’ | 1.80 ± 0.40 | 2.04 ± 0.33 | 0.45 ± 0.23 | 0.30 ± 0.16 | 9.54 | 6.58 | 3.82 | 3.78 | −0.99 | −1.24 |
| ‘GS33’ | 2.86 ± 0.36 | 0.49 ± 0.23 | 0.58 ± 0.24 | 0.50 ± 0.17 | 8.59 | 4.68 | 4.44 | 4.42 | −0.93 | −1.37 |
| ‘GS39’ | 3.94 ± 0.33 | 1.32 ± 0.24 | 0.58 ± 0.24 | 0.42 ± 0.16 | 9.13 | 4.81 | 3.02 | 3.75 | −0.67 | −1.17 |
| ‘HUAL’ | 4.06 ± 0.57 | 1.38 ± 0.45 | 0.89 ± 0.38 | 0.51 ± 0.25 | 14.22 | 10.14 | 5.96 | 5.68 | −0.89 | −1.11 |
| ‘ILAN’ | 4.10 ± 0.70 | 2.35 ± 0.43 | 0.92 ± 0.41 | 0.47 ± 0.23 | 14.38 | 9.43 | 6.60 | 5.59 | −1.27 | −1.09 |
| ‘JHCI’ | 3.72 ± 0.32 | 0.63 ± 0.18 | 0.56 ± 0.24 | 0.57 ± 0.16 | 10.23 | 5.50 | 2.79 | 3.83 | −0.45 | −0.37 |
| ‘JONP’ | 3.17 ± 0.34 | 0.58 ± 0.18 | 0.51 ± 0.23 | 0.28 ± 0.13 | 9.75 | 4.45 | 3.83 | 4.26 | −0.63 | −0.76 |
| ‘JPEI’ | 3.05 ± 0.46 | 1.70 ± 0.43 | 0.60 ± 0.29 | 0.68 ± 0.29 | 12.07 | 10.31 | 6.14 | 6.43 | −0.78 | −0.94 |
| ‘JULI’ | 2.20 ± 0.32 | 0.83 ± 0.26 | 0.63 ± 0.25 | 0.57 ± 0.20 | 9.33 | 5.70 | 4.98 | 6.01 | −0.51 | −0.95 |
| ‘JUNA’ | 3.16 ± 0.41 | 0.83 ± 0.27 | 0.46 ± 0.23 | 0.32 ± 0.16 | 10.38 | 5.75 | 4.56 | 4.66 | −0.89 | −1.19 |
| ‘PAOL’ | 2.84 ± 0.47 | 0.65 ± 0.31 | 0.52 ± 0.27 | 0.50 ± 0.24 | 12.30 | 9.80 | 5.68 | 5.58 | −0.80 | −0.78 |
| ‘S101’ | 3.50 ± 0.37 | 1.78 ± 0.29 | 0.72 ± 0.28 | 0.57 ± 0.23 | 11.76 | 8.98 | 2.63 | 3.96 | −0.50 | −0.51 |
| ‘S106’ | 2.90 ± 0.36 | 0.50 ± 0.22 | 0.35 ± 0.18 | 0.29 ± 0.14 | 9.21 | 5.70 | 4.42 | 4.36 | −0.82 | −0.87 |
| ‘S170’ | 2.14 ± 0.33 | 0.43 ± 0.20 | 0.96 ± 0.26 | 0.66 ± 0.17 | 9.22 | 5.00 | 3.94 | 4.27 | −0.71 | −1.00 |
| ‘SFON’ | 3.58 ± 0.48 | 1.19 ± 0.38 | 0.52 ± 0.26 | 0.42 ± 0.21 | 11.43 | 8.74 | 5.12 | 5.10 | −0.92 | −1.00 |
| ‘SHAN’ | 0.79 ± 0.40 | 1.87 ± 0.44 | 0.84 ± 0.37 | 0.63 ± 0.29 | 14.82 | 11.21 | 4.70 | 5.28 | −0.75 | −0.85 |
| ‘SHJU’ | 2.97 ± 0.45 | 1.20 ± 0.30 | 0.84 ± 0.31 | 0.76 ± 0.21 | 11.27 | 6.04 | 4.56 | 4.80 | −0.92 | −1.26 |
| ‘SHMN’ | 1.67 ± 0.34 | 0.36 ± 0.19 | 0.85 ± 0.28 | 0.71 ± 0.24 | 11.85 | 10.08 | 0.03 | 0.02 | −0.36 | −0.28 |
| ‘SINY’ | 3.82 ± 0.49 | 0.50 ± 0.26 | 1.01 ± 0.36 | 0.76 ± 0.27 | 13.29 | 9.31 | 5.64 | 5.57 | −0.73 | −0.73 |
| ‘TACH’ | 2.85 ± 0.49 | 0.68 ± 0.33 | 0.44 ± 0.23 | 0.36 ± 0.19 | 11.92 | 8.04 | 4.06 | 4.15 | −0.98 | −1.34 |
| ‘TOFN’ | 2.51 ± 0.46 | 0.5 ± 0.26 | 0.59 ± 0.28 | 0.62 ± 0.24 | 11.58 | 8.50 | 4.07 | 4.15 | −0.91 | −0.98 |
| ‘TSIO’ | 1.85 ± 0.45 | 0.96 ± 0.39 | 1.11 ± 0.33 | 0.96 ± 0.29 | 11.60 | 9.61 | 4.26 | 4.60 | −0.86 | −1.04 |
| ‘VR01’ | 1.60 ± 0.42 | 0.86 ± 0.33 | 0.46 ± 0.23 | 0.31 ± 0.16 | 10.31 | 6.85 | 4.46 | 4.40 | −0.97 | −1.33 |
| ‘WANS’ | 3.33 ± 0.49 | 2.05 ± 0.40 | 0.77 ± 0.32 | 0.83 ± 0.29 | 11.98 | 9.71 | 5.33 | 5.12 | −0.95 | −0.96 |
| ‘WARO’ | 2.01 ± 0.44 | 0.96 ± 0.32 | 0.81 ± 0.33 | 0.38 ± 0.20 | 13.44 | 10.57 | 5.08 | 4.06 | −0.55 | −0.47 |
| ‘WUFN’ | 2.61 ± 0.28 | 0.95 ± 0.18 | 0.51 ± 0.21 | 0.25 ± 0.12 | 9.00 | 4.00 | 2.43 | 4.46 | −0.42 | −0.82 |
| ‘WUKU’ | 2.71 ± 1.07 | 2.65 ± 1.05 | 1.99 ± 0.78 | 1.95 ± 0.76 | 29.23 | 28.39 | 0.05 | 1.59 | −0.92 | −0.95 |
| ‘YENL’ | 2.31 ± 0.36 | 0.73 ± 0.29 | 0.42 ± 0.21 | 0.31 ± 0.16 | 9.71 | 6.73 | 5.21 | 5.62 | −0.70 | −1.05 |
| ‘YM03’ | 1.61 ± 0.51 | 1.80 ± 0.40 | 0.78 ± 0.35 | 0.94 ± 0.32 | 13.74 | 11.38 | 5.84 | 5.23 | −0.80 | −0.64 |
| ‘YM05’ | 2.68 ± 0.47 | 0.77 ± 0.34 | 0.85 ± 0.34 | 0.59 ± 0.26 | 12.98 | 9.91 | 3.95 | 4.51 | −0.72 | −0.83 |
| Mean | 2.77 ± 0.45 | 1.12 ± 0.34 | 0.72 ± 0.30 | 0.59 ± 0.23 | 12.08 | 8.72 | 4.21 | 4.46 | −0.77 | −0.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Liu, B.; Dai, W.; Kuang, C.; Xing, X. Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island. Remote Sens. 2021, 13, 4221. https://doi.org/10.3390/rs13214221
Ma X, Liu B, Dai W, Kuang C, Xing X. Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island. Remote Sensing. 2021; 13(21):4221. https://doi.org/10.3390/rs13214221
Chicago/Turabian StyleMa, Xiaojun, Bin Liu, Wujiao Dai, Cuilin Kuang, and Xuemin Xing. 2021. "Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island" Remote Sensing 13, no. 21: 4221. https://doi.org/10.3390/rs13214221
APA StyleMa, X., Liu, B., Dai, W., Kuang, C., & Xing, X. (2021). Potential Contributors to Common Mode Error in Array GPS Displacement Fields in Taiwan Island. Remote Sensing, 13(21), 4221. https://doi.org/10.3390/rs13214221