
3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds




Abstract
:
1. Introduction
- (1)
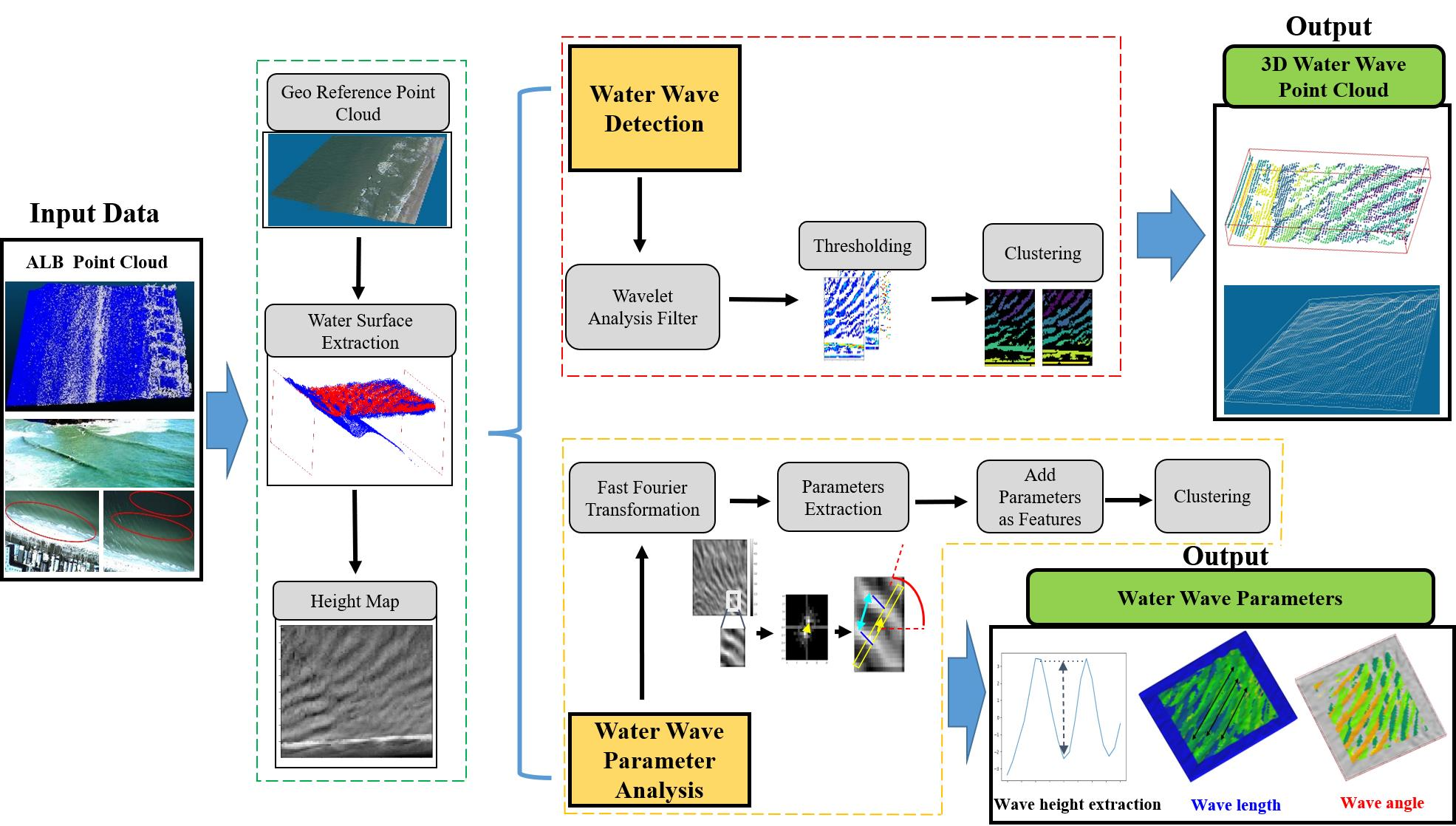
- Presenting a novel water wave detection pipeline—interpretable method—which can simultaneously target different types of water waves in Airborne LiDAR Bathymetry (ALB) point clouds.
- (2)
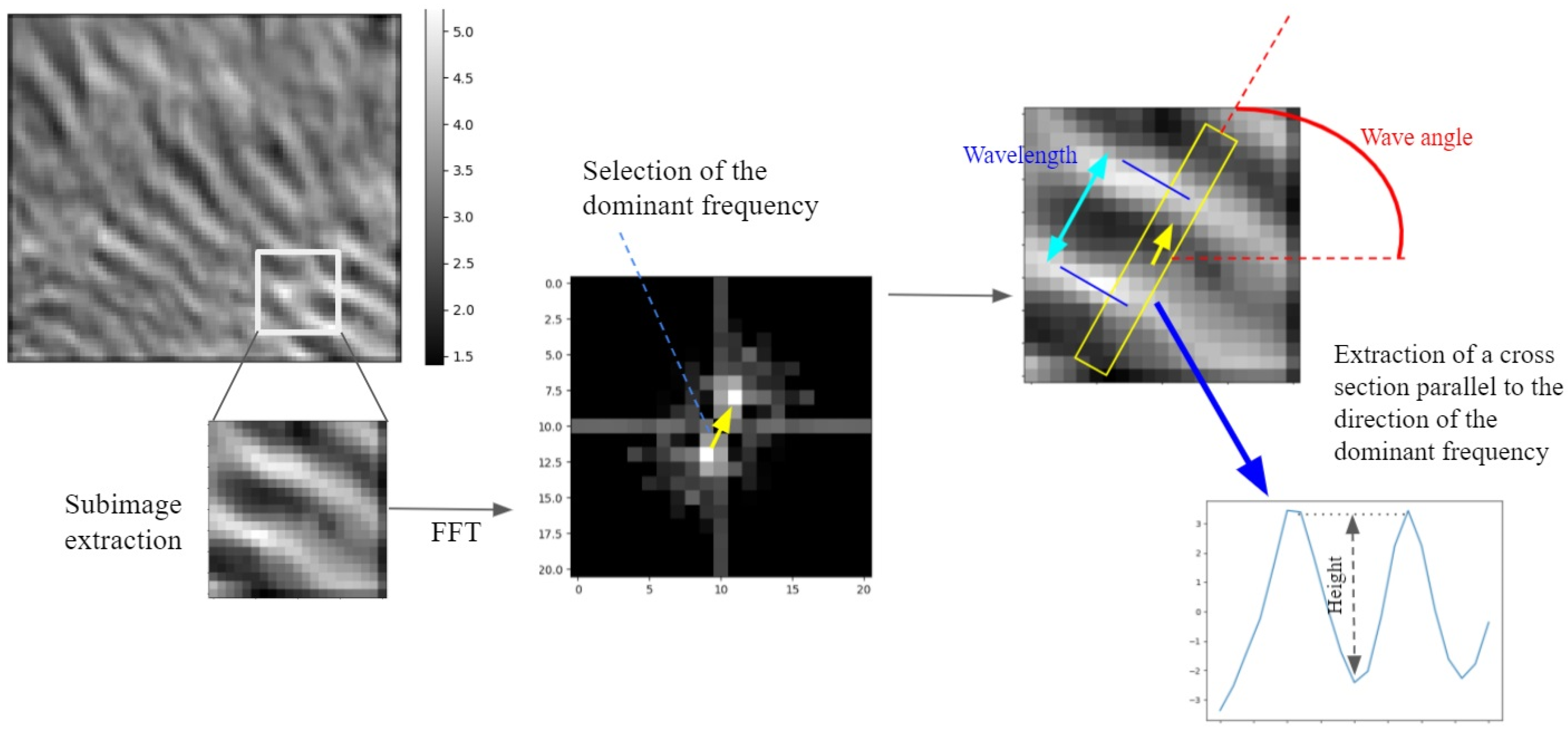
- Estimation of wave parameters such as wave height, wave length, and wave orientation.
- (3)
- Exploring a modified Density-Based Spatial Clustering of Applications with Noise (DBSCAN) method with a connectivity constraint and a multi-level 2.5D analysis of water surface. The paper continues below.
2. Materials and Methods
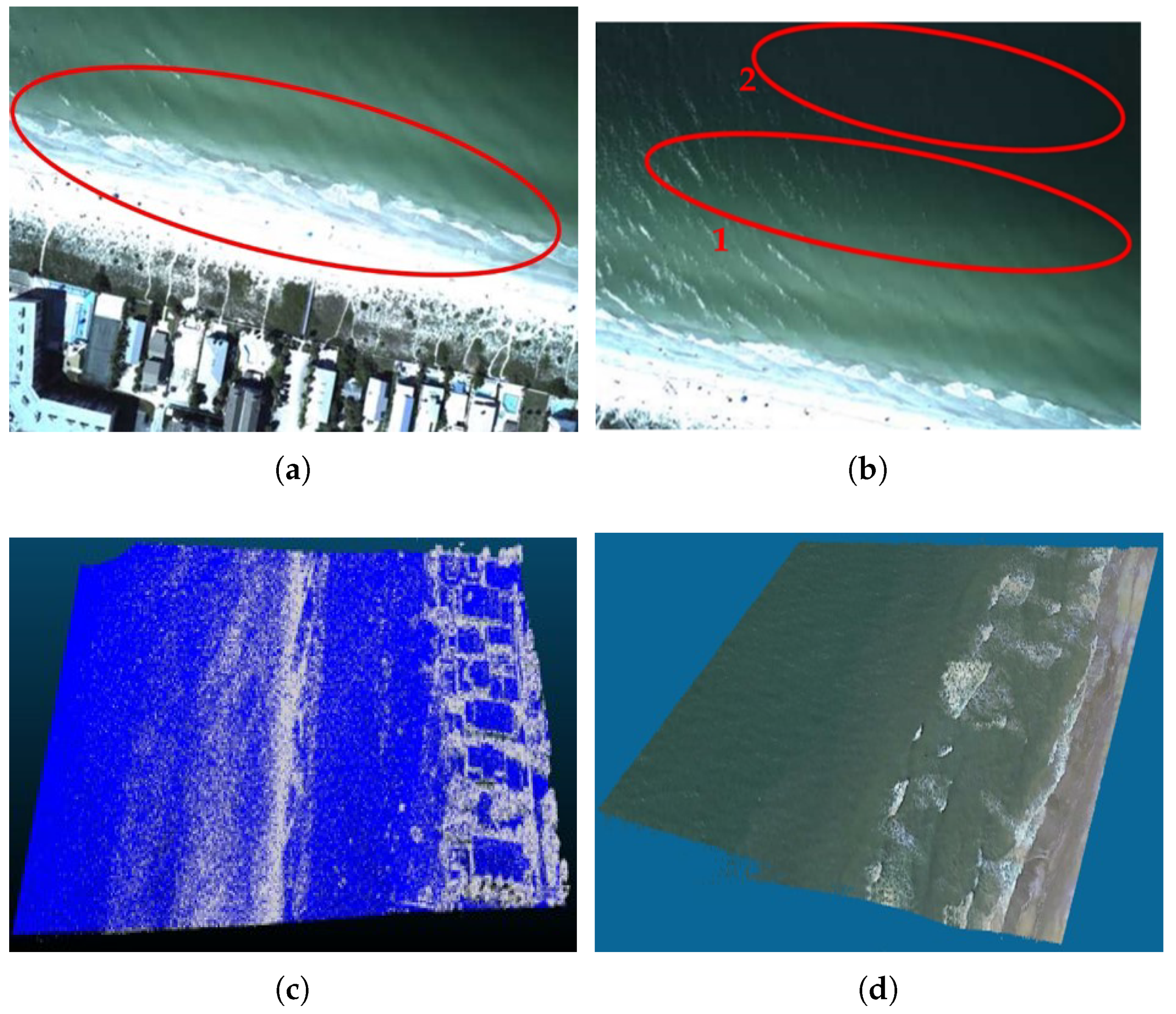
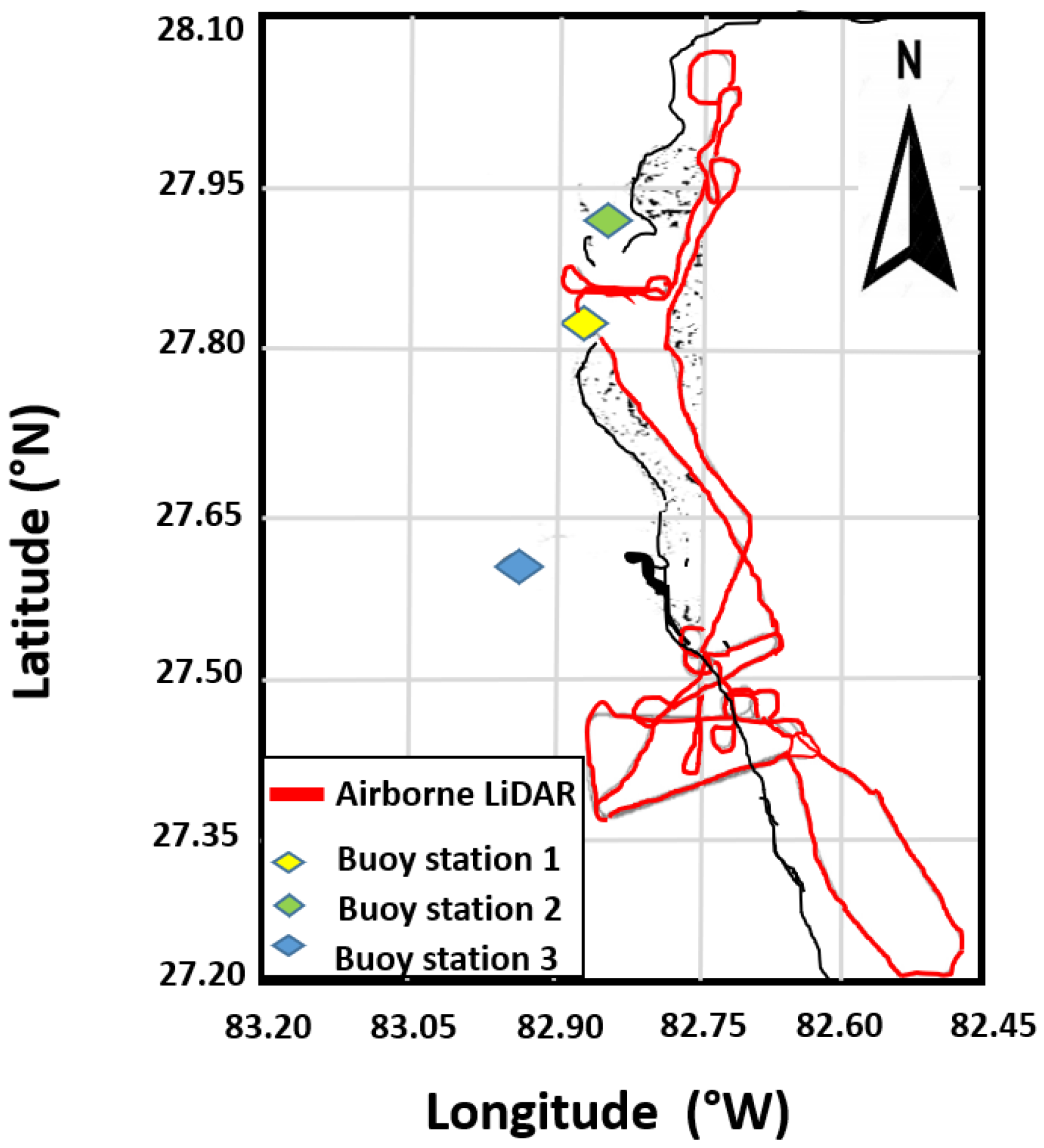
2.1. Data Description
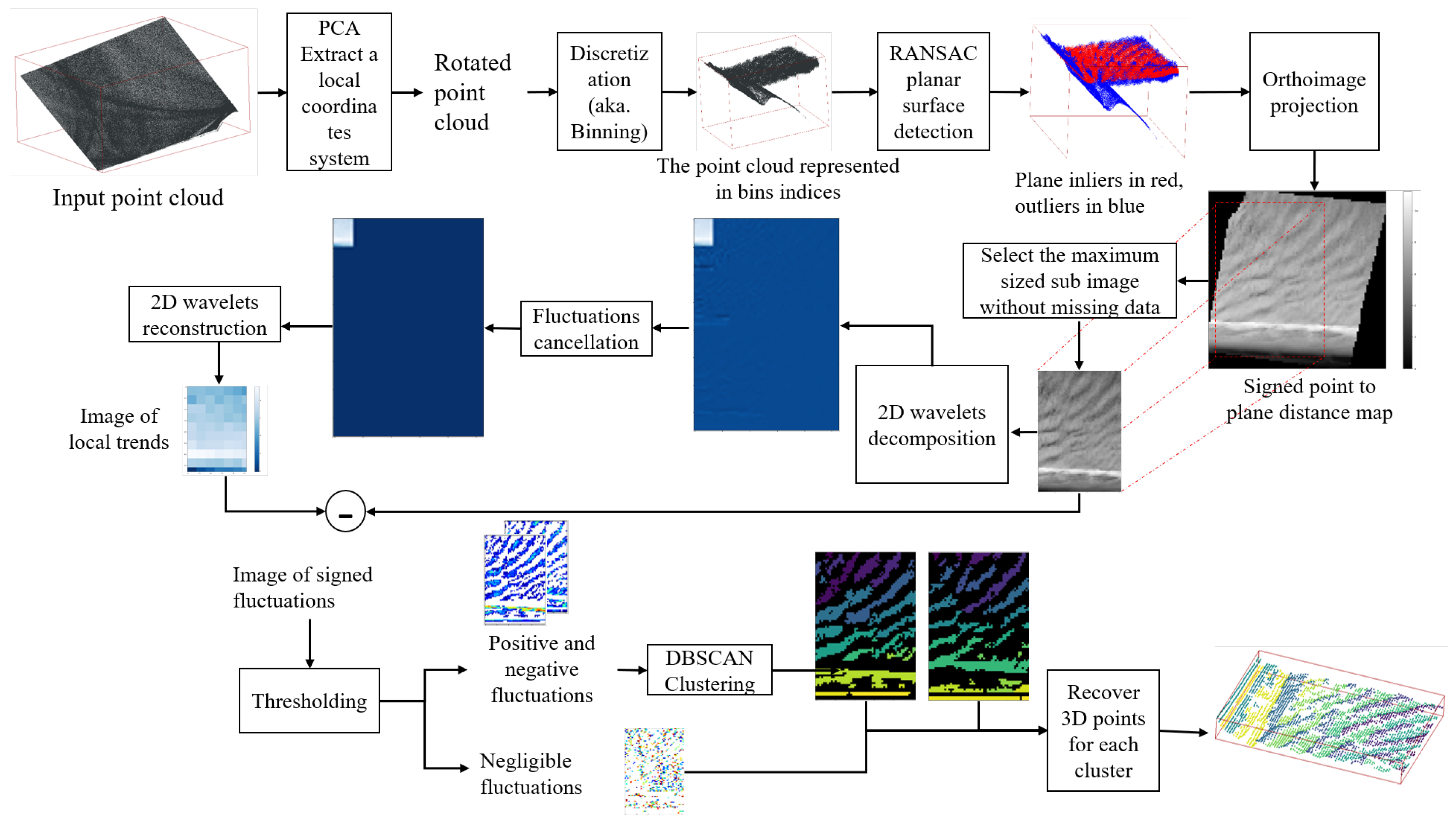
| Algorithm 1 waves detection from point clouds() |
| Input: A point cloud P |
| Input: the number of range subdivisions by axis |
| Input:, the standard deviation factor, used for plane inliers selection |
| Input:, the rotation angle step used for the minimum bounding box computation (typically 1 degree) |
| Input: The approximate size of the 2.5D height image: |
| Input: The threshold s.t. any fluctuation with a magnitude lower than is considered stationary |
| Result: A copy of P with and additional field label. The label is 0 for stationary points, ≥0 for waves clusters, and −1 otherwise (e.g., underwater points) |
| 1: , (LRF is LocalReferenceFrame) |
| 2: Compute the projection of the point cloud onto the local reference frame |
| 3: |
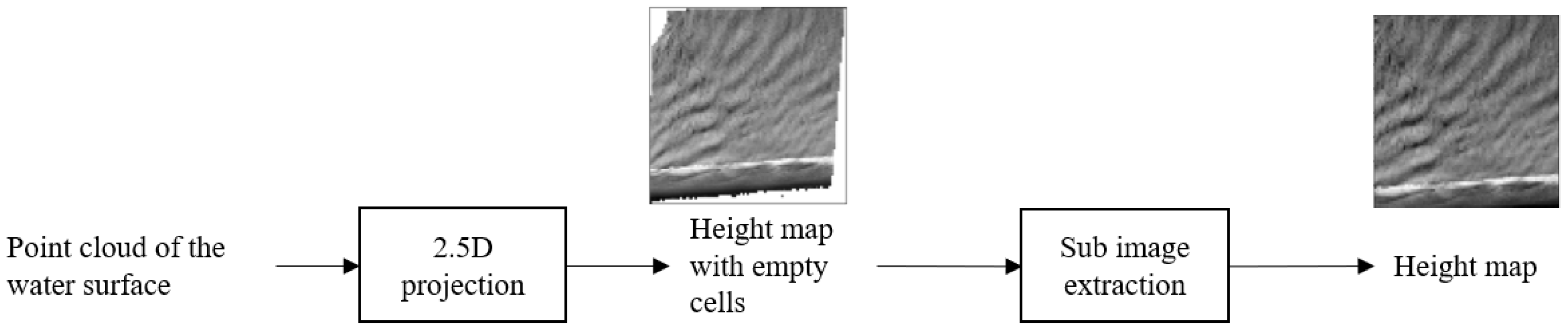
| 4: Compute the height map: |
| 5: Extract the sub-image of I without empty pixels |
| 6: Decompose in low frequency and high frequency coefficients using 2D wavelets analysis |
| 7: Compute the reconstruction of I using the low frequency components exclusively |
| 8: |
| 9: |
| 10: , we use as a growing radius to exclusively allow merging pixels within 1 pixel of distance the current cluster |
| 11: |
| 12: |
| return: |
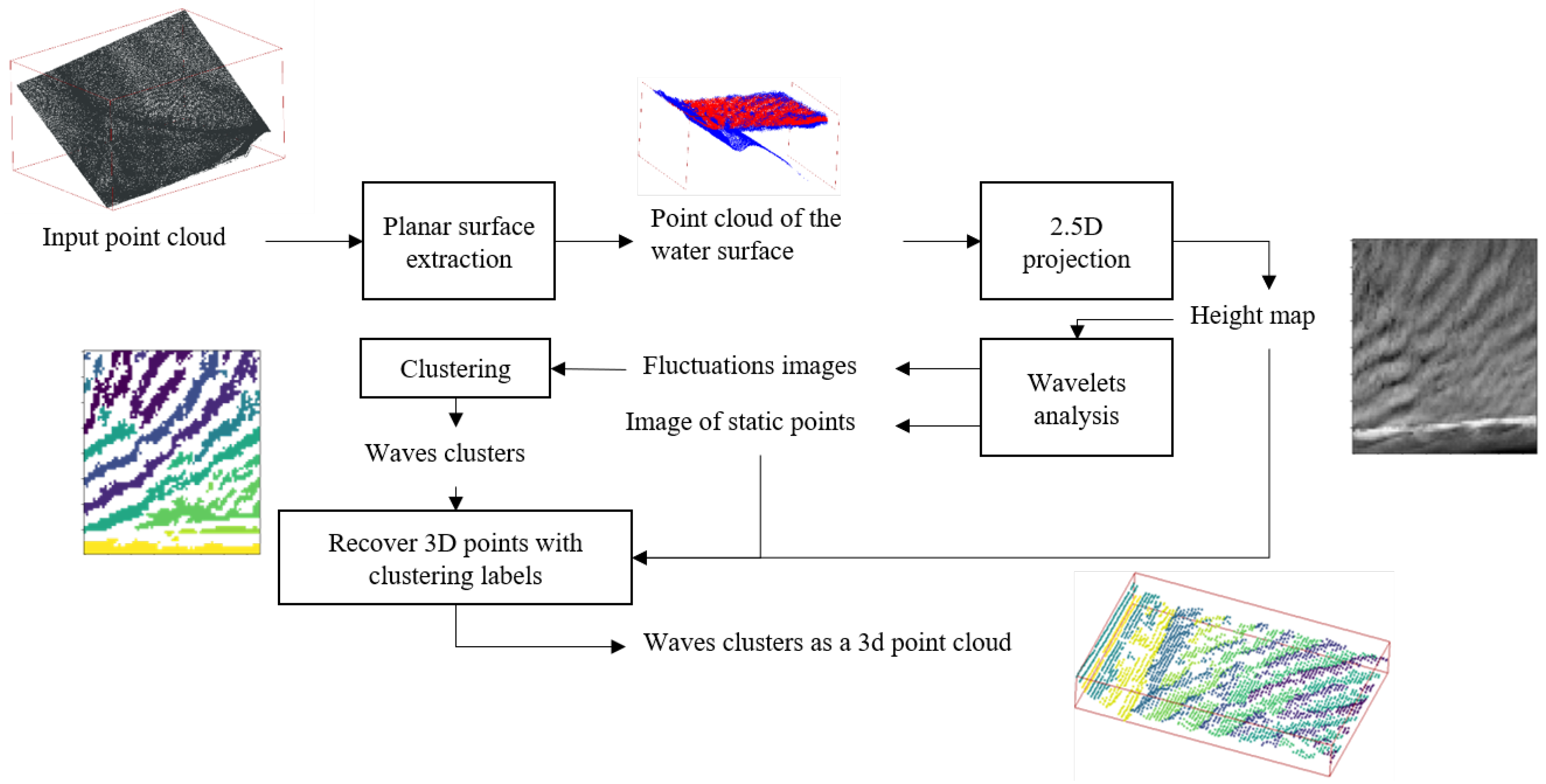
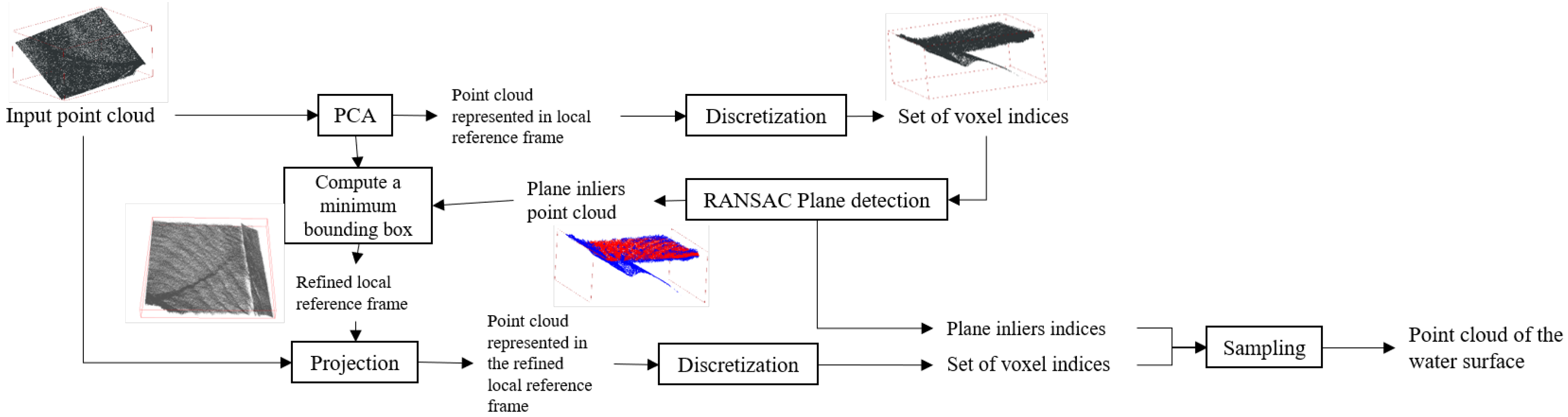
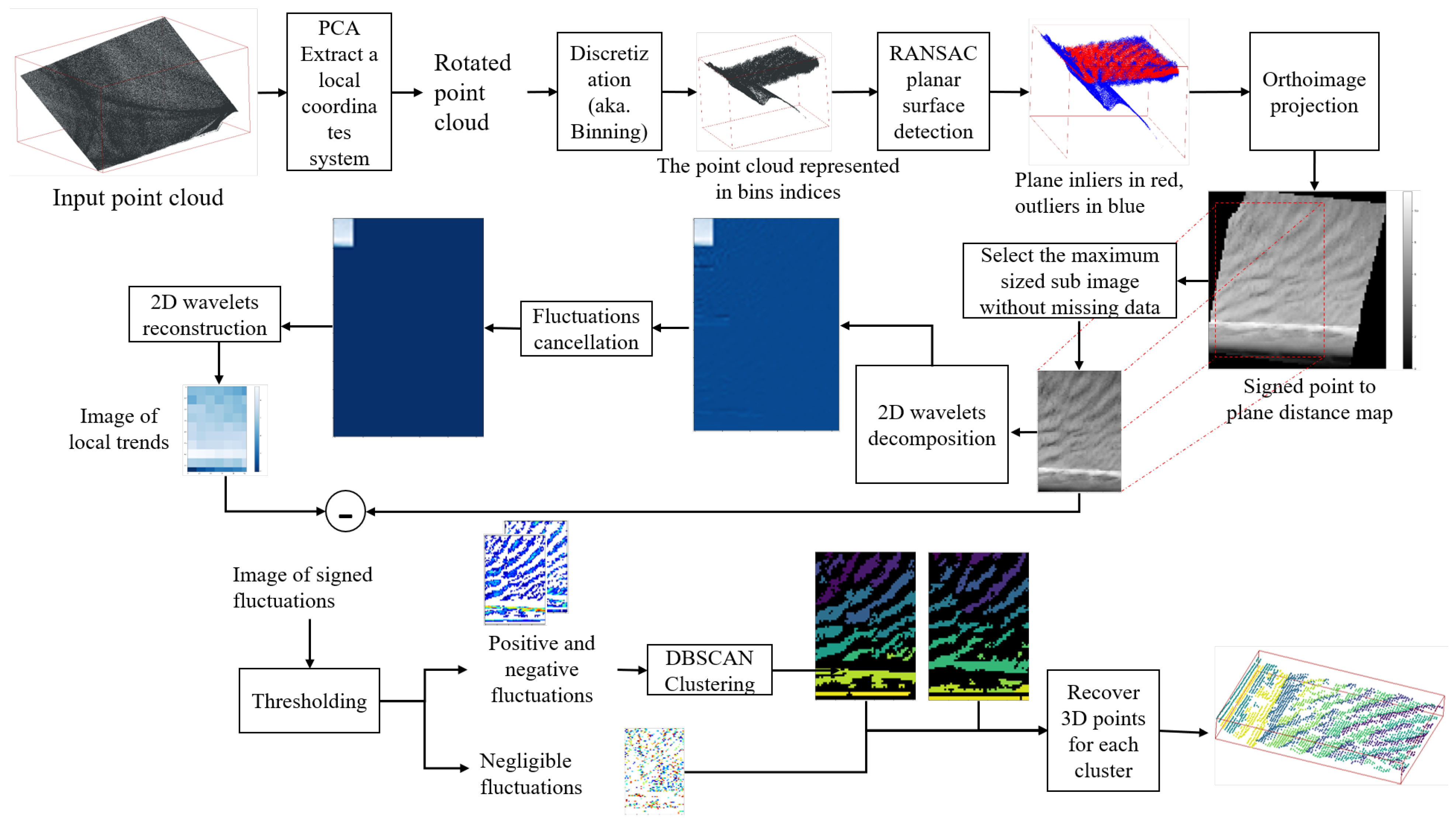
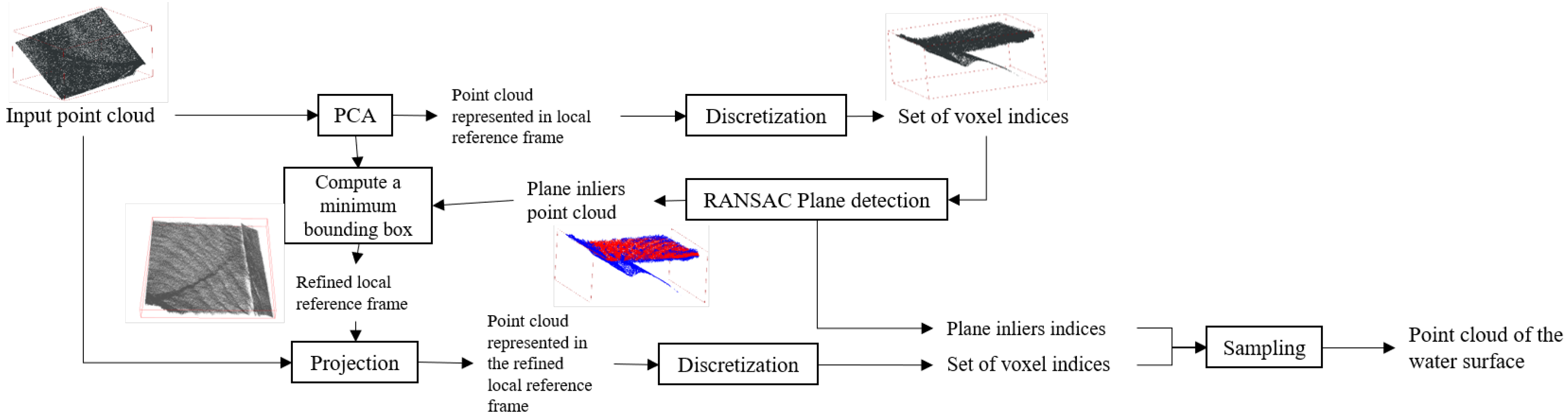
2.2. Planar Surface Extraction
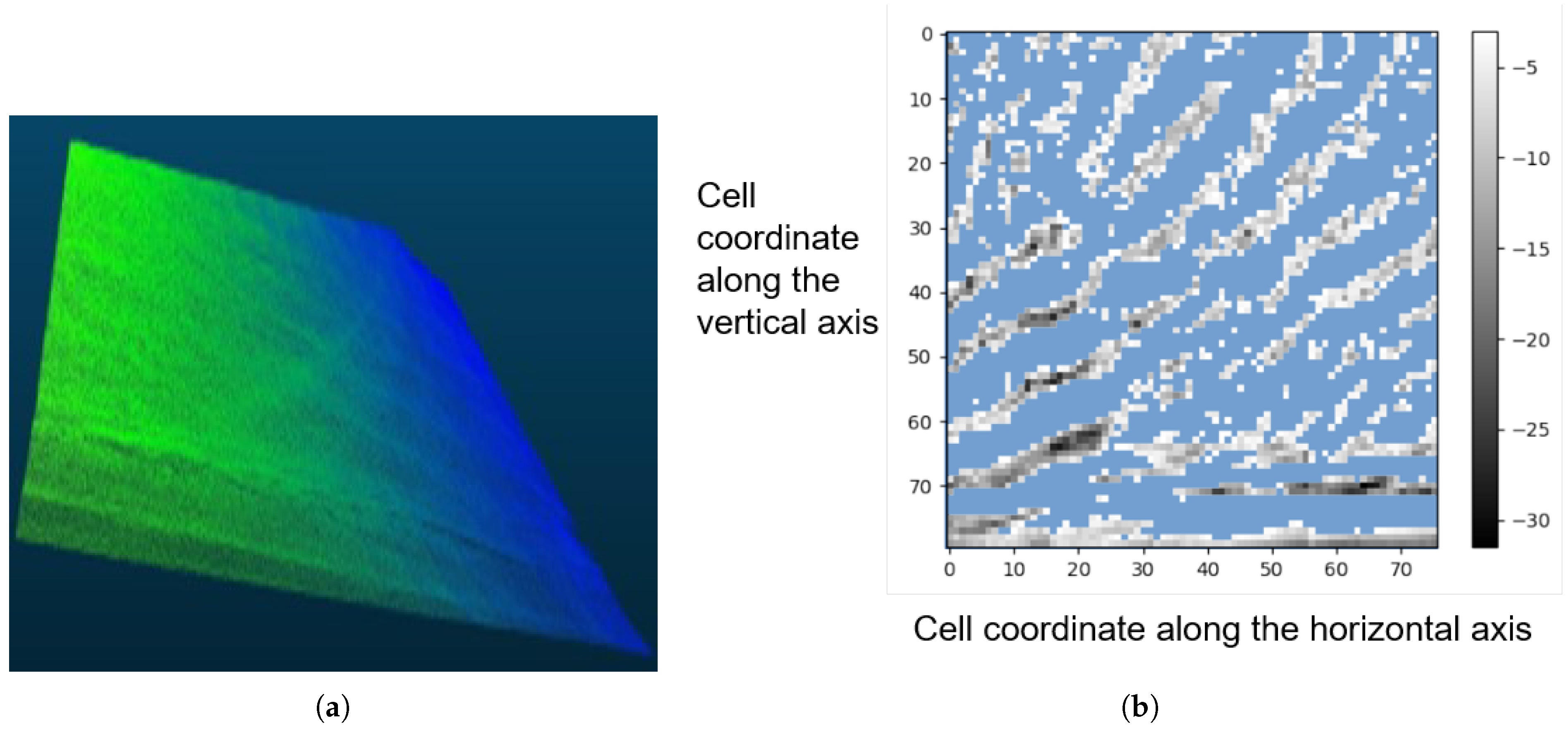
2.3. 2.5D Projection
2.4. Wavelets Analysis
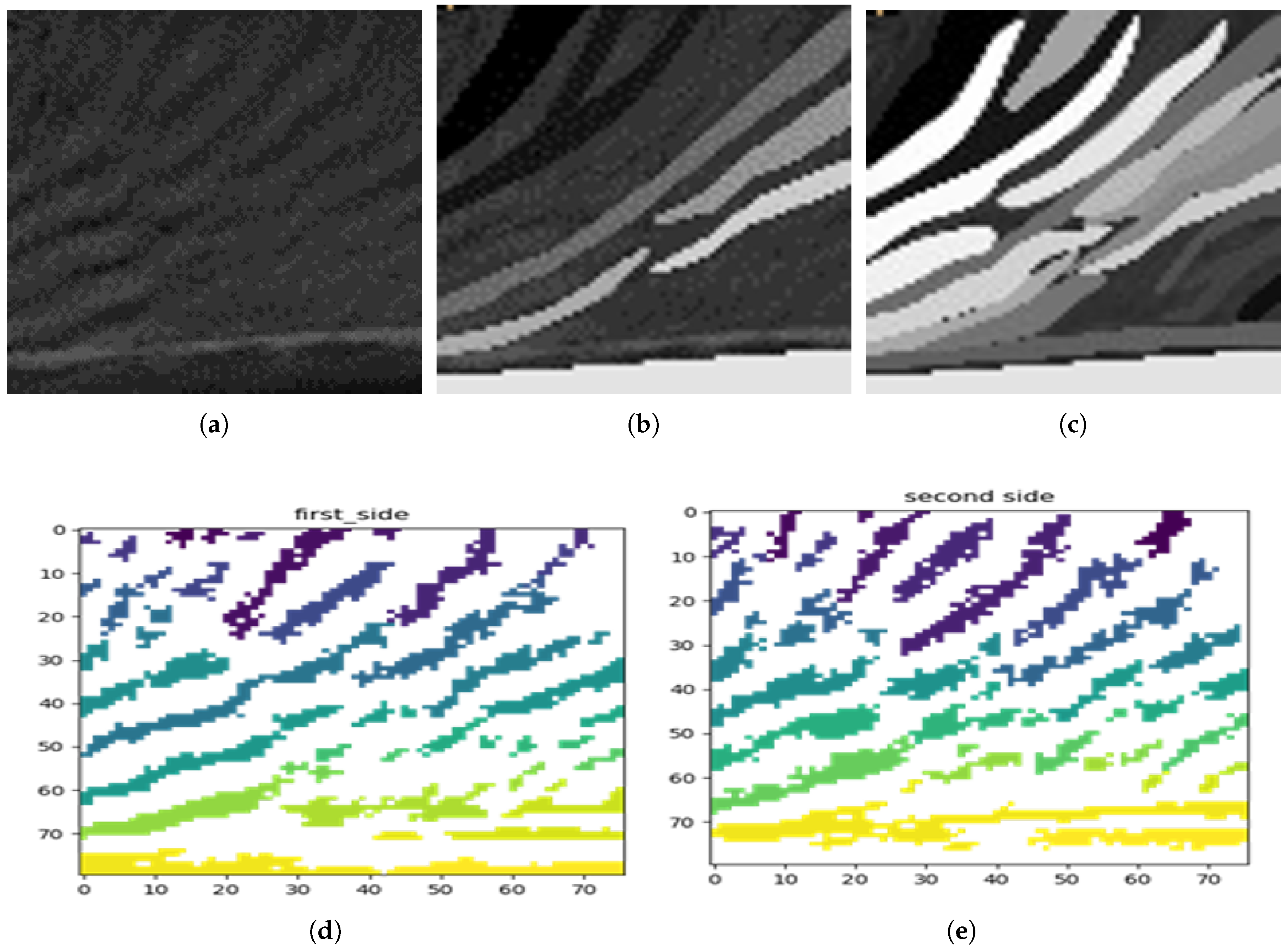
2.4.1. Wavelet Denoising
2.4.2. Signal Detrending Using Wavelets
- -
- gives the static pixels;
- -
- gives concave wave parts;
- -
- gives convex wave parts.
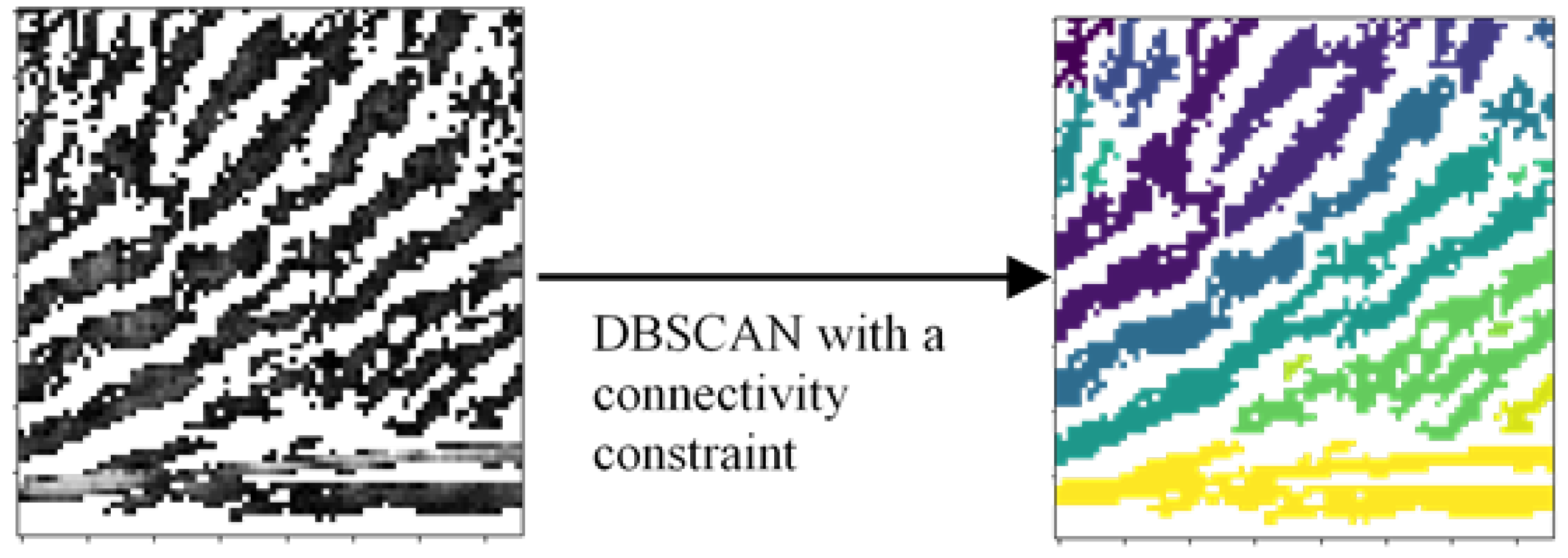
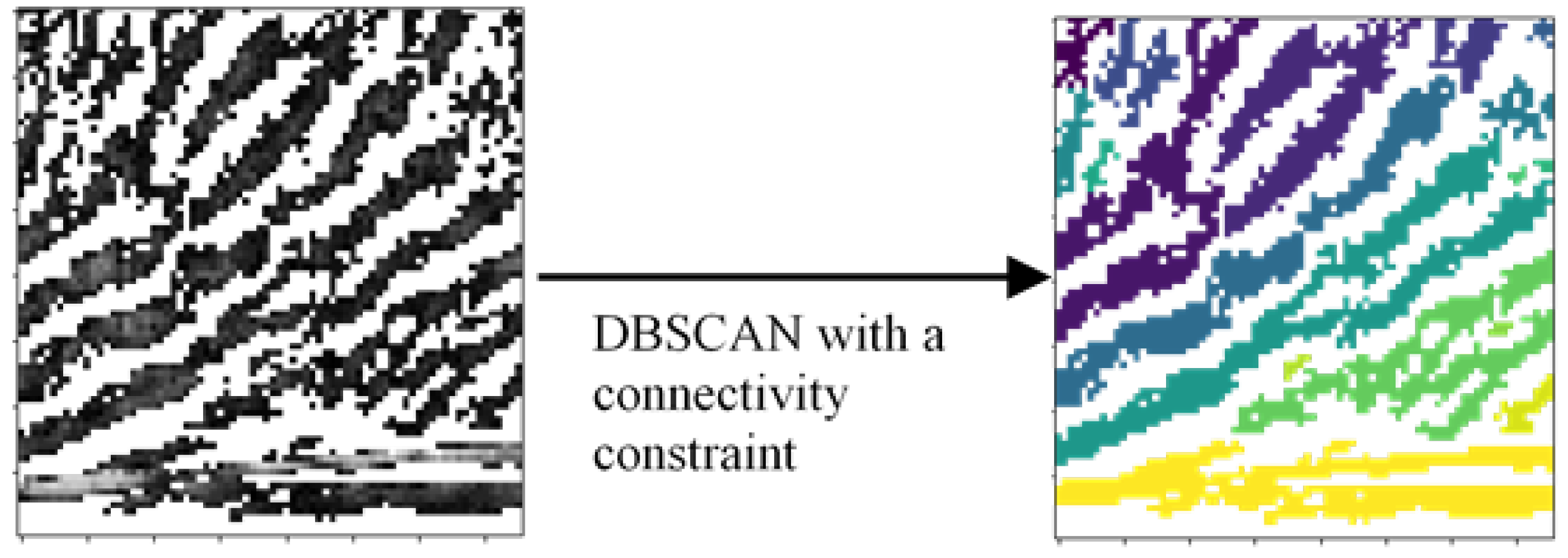
2.5. Clustering
- (1)
- Penalizes empty pixels (connectivity constraint) by returning and infinite as the distance between an empty pixel and a valid pixel.
- (2)
- Returns the Euclidean distance between the pixels’ indices otherwise. Note that we do not use pixel values for the clustering as the shape of convex and concave waves are already separated by finding a suitable threshold for static points, as shown in Figure 11.
2.6. Recover 3D Points with Clustering Labels
- -
- Initialize a label counter = 0;
- -
- For each label in the cluster, use the height map to recover all the indices of 3D points belonging to the cluster;
- ·
- Replace the column label by the label counter value;
- ·
- Increase the label counter and continue;
- -
- Return the point cloud with clusters’ labels.
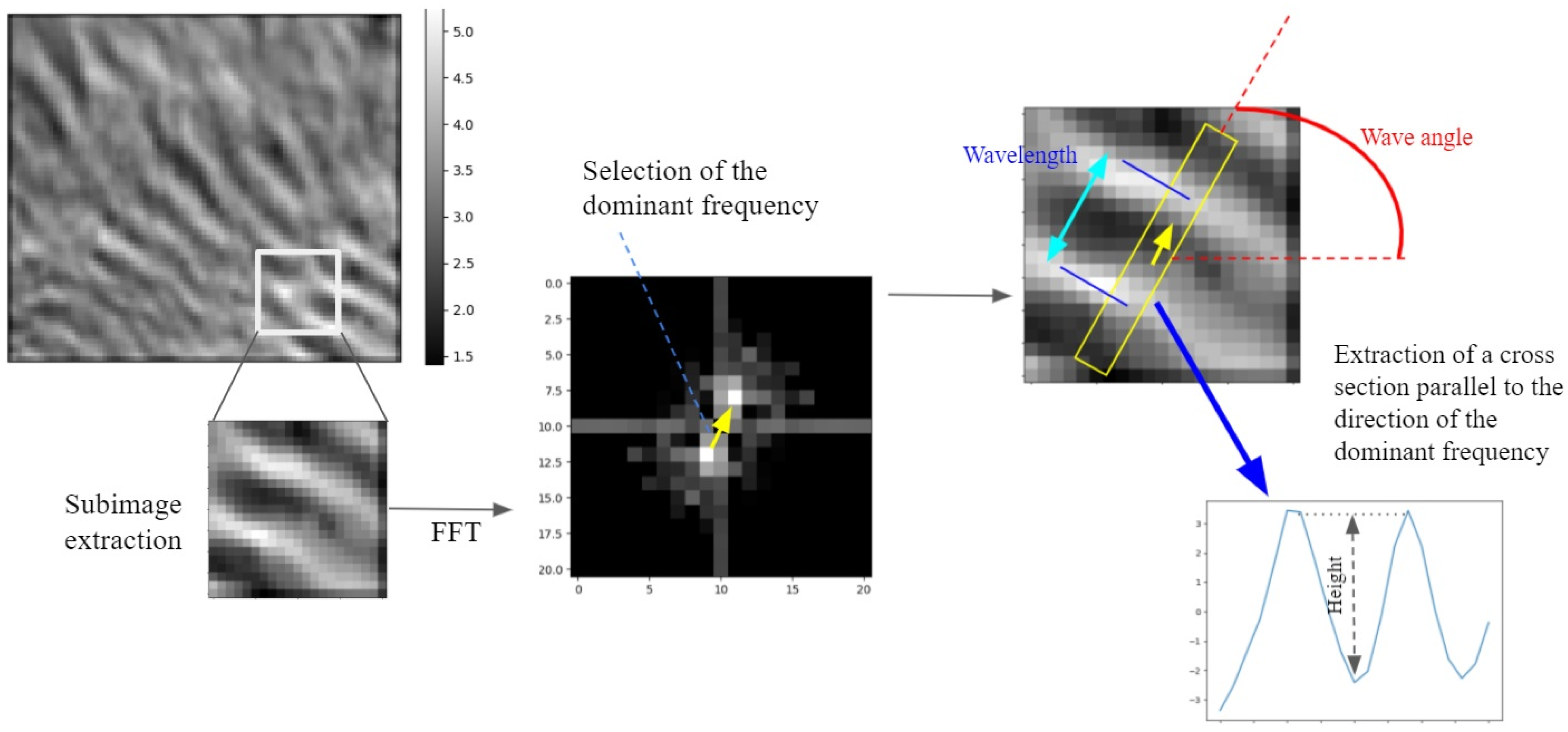
2.7. Wave Parameters Measurement
3. Results
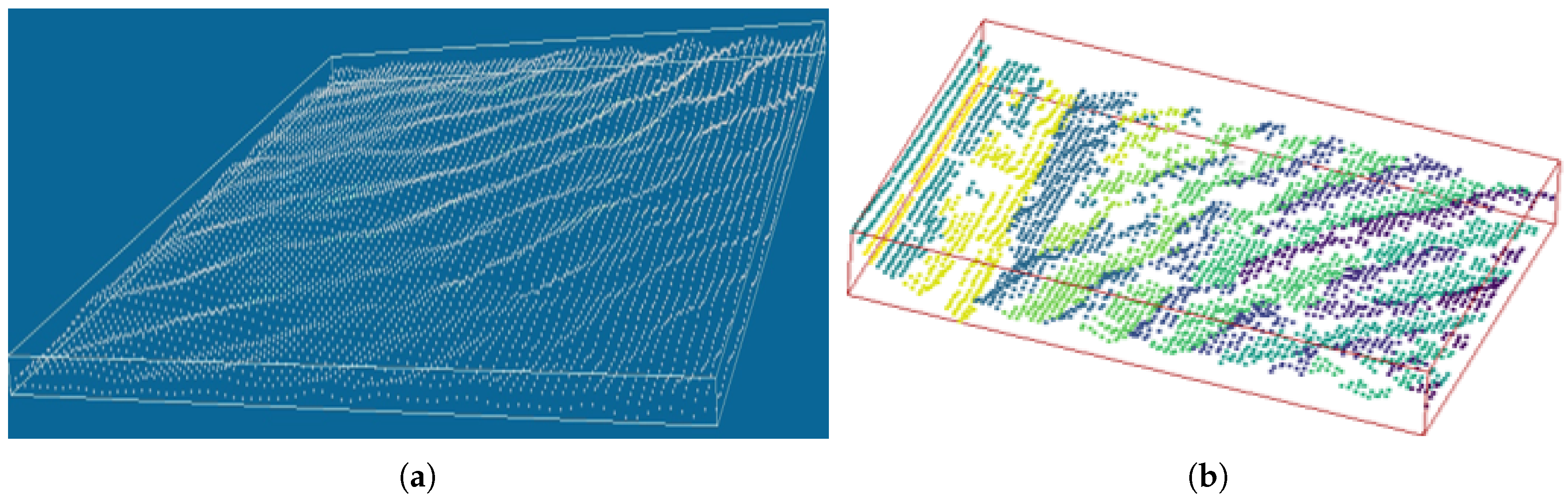
3.1. Water Wave Detection Result
3.2. Water Waves Analysis
3.3. Significant Wave Height Estimation
4. Discussion
4.1. In Situ Measurements
4.2. Satellite Observations
4.3. Quantitative Assessment Measures
4.4. Complexity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schulz-Stellenfleth, J. Ocean Wave Measurements Using Complex Synthetic Aperture Radar Data. Ph.D. Thesis, Staats-und Universitätsbibliothek Hamburg Carl von Ossietzky, Hamburg, Germany, 2003. [Google Scholar]
- Wang, H.; Zhu, J.; Yang, J.; Shi, C. A semiempirical algorithm for SAR wave height retrieval and its validation using Envisat ASAR wave mode data. Acta Oceanol. Sin. 2012, 31, 59–66. [Google Scholar] [CrossRef]
- Schulz-Stellenfleth, J.; Lehner, S.; Hoja, D. A parametric scheme for the retrieval of two-dimensional ocean wave spectra from synthetic aperture radar look cross spectra. J. Geophys. Res. Ocean. 2005, 110. [Google Scholar] [CrossRef] [Green Version]
- Shao, W.; Zhang, Z.; Li, X.; Li, H. Ocean wave parameters retrieval from Sentinel-1 SAR imagery. Remote Sens. 2016, 8, 707. [Google Scholar] [CrossRef] [Green Version]
- Ren, L.; Yang, J.; Zheng, G.; Wang, J. Significant wave height estimation using azimuth cutoff of C-band RADARSAT-2 single-polarization SAR images. Acta Oceanol. Sin. 2015, 34, 93–101. [Google Scholar] [CrossRef]
- Li, X.M.; Lehner, S.; Bruns, T. Ocean wave integral parameter measurements using Envisat ASAR wave mode data. IEEE Trans. Geosci. Remote Sens. 2010, 49, 155–174. [Google Scholar] [CrossRef] [Green Version]
- Smit, P.; Houghton, I.; Jordanova, K.; Portwood, T.; Shapiro, E.; Clark, D.; Sosa, M.; Janssen, T. Assimilation of significant wave height from distributed ocean wave sensors. Ocean Model. 2021, 159, 101738. [Google Scholar] [CrossRef]
- Collard, F.; Ardhuin, F.; Chapron, B. Extraction of coastal ocean wave fields from SAR images. IEEE J. Ocean. Eng. 2005, 30, 526–533. [Google Scholar] [CrossRef]
- Romeiser, R.; Graber, H.C.; Caruso, M.J.; Jensen, R.E.; Walker, D.T.; Cox, A.T. A new approach to ocean wave parameter estimates from C-band ScanSAR images. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1320–1345. [Google Scholar] [CrossRef]
- Vesecky, J.F.; Stewart, R.H. The observation of ocean surface phenomena using imagery from the SEASAT synthetic aperture radar: An assessment. J. Geophys. Res. Ocean. 1982, 87, 3397–3430. [Google Scholar] [CrossRef]
- Bjerkaas, A.; Riedel, F. Proposed Model for the Elevation Spectrum of a Wind-Roughened Sea Surface; Technical Report; Johns Hopkins Univ Laurel Md Applied Physics Lab.: Laurel, MD, USA, 1979. [Google Scholar]
- Suchandt, S.; Runge, H. Ocean surface observations using the TanDEM-X satellite formation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5096–5105. [Google Scholar] [CrossRef] [Green Version]
- Kahle, R.; Runge, H.; Ardaens, J.S.; Suchandt, S.; Romeiser, R. Formation flying for along-track interferometric oceanography—First in-flight demonstration with TanDEM-X. Acta Astronaut. 2014, 99, 130–142. [Google Scholar] [CrossRef]
- Ardhuin, F.; Stopa, J.; Chapron, B.; Collard, F.; Smith, M.; Thomson, J.; Doble, M.; Blomquist, B.; Persson, O.; Collins, C.O., III; et al. Measuring ocean waves in sea ice using SAR imagery: A quasi-deterministic approach evaluated with Sentinel-1 and in situ data. Remote Sens. Environ. 2017, 189, 211–222. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Wang, Y.; Yang, J. Forecasting of Significant Wave Height Based on Gated Recurrent Unit Network in the Taiwan Strait and Its Adjacent Waters. Water 2021, 13, 86. [Google Scholar] [CrossRef]
- Stopa, J.E.; Mouche, A. Significant wave heights from S entinel-1 SAR: Validation and applications. J. Geophys. Res. Ocean. 2017, 122, 1827–1848. [Google Scholar] [CrossRef] [Green Version]
- Ardhuin, F.; Collard, F.; Chapron, B.; Girard-Ardhuin, F.; Guitton, G.; Mouche, A.; Stopa, J.E. Estimates of ocean wave heights and attenuation in sea ice using the SAR wave mode on Sentinel-1A. Geophys. Res. Lett. 2015, 42, 2317–2325. [Google Scholar] [CrossRef] [Green Version]
- Mastenbroek, C.; De Valk, C. A semiparametric algorithm to retrieve ocean wave spectra from synthetic aperture radar. J. Geophys. Res. Ocean. 2000, 105, 3497–3516. [Google Scholar] [CrossRef]
- Fu, L.L.; Holt, B. Internal waves in the Gulf of California: Observations from a spaceborne radar. J. Geophys. Res. Ocean. 1984, 89, 2053–2060. [Google Scholar] [CrossRef]
- Kropfli, R.; Ostrovski, L.; Stanton, T.; Skirta, E.; Keane, A.; Irisov, V. Relationships between strong internal waves in the coastal zone and their radar and radiometric signatures. J. Geophys. Res. Ocean. 1999, 104, 3133–3148. [Google Scholar] [CrossRef]
- Hwang, P.A.; Reul, N.; Meissner, T.; Yueh, S.H. Ocean surface foam and microwave emission: Dependence on frequency and incidence angle. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8223–8234. [Google Scholar] [CrossRef]
- Roggenbuck, O.; Reinking, J.; Lambertus, T. Determination of significant wave heights using damping coefficients of attenuated GNSS SNR data from static and kinematic observations. Remote Sens. 2019, 11, 409. [Google Scholar] [CrossRef] [Green Version]
- Löfgren, J. Local Sea Level Observations Using Reflected GNSS Signals; Chalmers Tekniska Hogskola: Göteborg, Sweden, 2014. [Google Scholar]
- Roggenbuck, O.; Reinking, J. Sea surface heights retrieval from ship-based measurements assisted by GNSS signal reflections. Mar. Geod. 2019, 42, 1–24. [Google Scholar] [CrossRef]
- Fagundes, M.; Mendonça-Tinti, I.; Iescheck, A.; Akos, D.; Geremia-Nievinski, F. An open-source low-cost sensor for SNR-based GNSS reflectometry: Design and long-term validation towards sea-level altimetry. GPS Solut. 2021, 25, 1–11. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. Ocean. 1997, 102, 15781–15796. [Google Scholar] [CrossRef]
- Pierson, W.J., Jr.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of SA Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Almeida, L.P.; Almar, R.; Blenkinsopp, C.; Senechal, N.; Bergsma, E.; Floc’h, F.; Caulet, C.; Biausque, M.; Marchesiello, P.; Grandjean, P.; et al. Lidar observations of the swash zone of a low-tide terraced tropical beach under variable wave conditions: The nha trang (vietnam) coastvar experiment. J. Mar. Sci. Eng. 2020, 8, 302. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Power, H.E.; Bruder, B.; Puleo, J.A.; Bergsma, E.W. High-resolution monitoring of wave transformation in the surf zone using a LiDAR scanner array. Coast. Eng. 2017, 128, 37–43. [Google Scholar] [CrossRef]
- Bryan, O.; Bayle, P.M.; Blenkinsopp, C.E.; Hunter, A.J. Breaking wave imaging using lidar and sonar. IEEE J. Ocean. Eng. 2019, 45, 887–897. [Google Scholar] [CrossRef] [Green Version]
- Buscombe, D.; Carini, R.J. A data-driven approach to classifying wave breaking in infrared imagery. Remote Sens. 2019, 11, 859. [Google Scholar] [CrossRef] [Green Version]
- Stringari, C.; Harris, D.; Power, H. A novel machine learning algorithm for tracking remotely sensed waves in the surf zone. Coast. Eng. 2019, 147, 149–158. [Google Scholar] [CrossRef]
- Buscombe, D.; Carini, R.J.; Harrison, S.R.; Chickadel, C.C.; Warrick, J.A. Optical wave gauging using deep neural networks. Coast. Eng. 2020, 155, 103593. [Google Scholar] [CrossRef]
- den Bieman, J.P.; de Ridder, M.P.; van Gent, M.R. Deep learning video analysis as measurement technique in physical models. Coast. Eng. 2020, 158, 103689. [Google Scholar] [CrossRef]
- Bärfuss, K.; Djath, B.; Lampert, A.; Schulz-Stellenfleth, J. Airborne LiDAR Measurements of Sea Surface Properties in the German Bight. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4608–4617. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Kim, T.; Huh, D.; Caires, S. Wave-tracking in the surf zone using coastal video imagery with deep neural networks. Atmosphere 2020, 11, 304. [Google Scholar] [CrossRef] [Green Version]
- Hwang, P.A. A note on the ocean surface roughness spectrum. J. Atmos. Ocean. Technol. 2011, 28, 436–443. [Google Scholar] [CrossRef]
- Vrbancich, J.; Lieff, W.; Hacker, J. Demonstration of two portable scanning LiDAR systems flown at low-altitude for investigating coastal sea surface topography. Remote Sens. 2011, 3, 1983–2001. [Google Scholar] [CrossRef] [Green Version]
- Bärfuss, K.; Schulz-Stellenfleth, J.; Lampert, A. The Impact of Offshore Wind Farms on Sea State Demonstrated by Airborne LiDAR Measurements. J. Mar. Sci. Eng. 2021, 9, 644. [Google Scholar] [CrossRef]
- Lampert, A.; Bärfuss, K.; Platis, A.; Siedersleben, S.; Djath, B.; Cañadillas, B.; Hunger, R.; Hankers, R.; Bitter, M.; Feuerle, T.; et al. In situ airborne measurements of atmospheric and sea surface parameters related to offshore wind parks in the German Bight. Earth Syst. Sci. Data 2020, 12, 935–946. [Google Scholar] [CrossRef]
- Churnside, J.H.; Marchbanks, R.D.; Lee, J.H.; Shaw, J.A.; Weidemann, A.; Donaghay, P.L. Airborne lidar detection and characterization of internal waves in a shallow fjord. J. Appl. Remote Sens. 2012, 6, 063611. [Google Scholar] [CrossRef] [Green Version]
- Lyzenga, D.R.; Bennett, J.R. Full-spectrum modeling of synthetic aperture radar internal wave signatures. J. Geophys. Res. Ocean. 1988, 93, 12345–12354. [Google Scholar] [CrossRef]
- Thompson, D. Calculation of radar backscatter modulations from internal waves. J. Geophys. Res. Ocean. 1988, 93, 12371–12380. [Google Scholar] [CrossRef]
- Hwang, P.A.; Krabill, W.B.; Wright, W.; Swift, R.N.; Walsh, E.J. Airborne scanning lidar measurement of ocean waves. Remote Sens. Environ. 2000, 73, 236–246. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Friedman, J.; Hastie, T.; Tibshirani, R. The Elements of Statistical Learning; Springer: New York, NY, USA, 2001; Volume 1. [Google Scholar]
- Tuckcr, M. Waves in Ocean Engineering: Measurement Analysis and Interpretation; Ellis Horwood: London, UK, 1991. [Google Scholar]
- Brigham, E.O. The Fast Fourier Transform and Its Applications; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1988. [Google Scholar]
- Battjes, J. A review of methods to establish the wave climate for breakwater design. Coast. Eng. 1984, 8, 141–160. [Google Scholar] [CrossRef]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Number | Date | Time | Wind Speed and Direction | |
|---|---|---|---|---|
| WSPD (m/s) | Direction (deg) | |||
| 1 | 2015/10/15 | Evening | 4.4 | 339 |
| Flight Number | SWH During measurement (m) | |||
| LiDAR | Station 3 | Station 2 | Station 1 | |
| 1 | 0.49 | 0.55 | N/A | N/A |
| Wave Numbers | Label | Average Wave Height (m) | Average Wave Length (m) | Average Wave Angle (Orientation) (Degree) |
|---|---|---|---|---|
| 0 | −1 | 0.432 | 10.150 | 160.793 |
| 1 | 0 | 0.410 | 8.088 | 153.434 |
| 2 | 1 | 0.551 | 10.901 | 135 |
| 3 | 2 | 0.433 | 9.117 | 116.565 |
| 4 | 3 | 0.395 | 5.450 | 135 |
| 5 | 4 | 0.301 | 9.117 | 116.565 |
| 6 | 5 | 0.169 | 5.450 | 45 |
| 7 | 6 | 0.322 | 11.177 | 161.565 |
| 8 | 7 | 0.318 | 8.088 | 153.434 |
| 9 | 8 | 0.225 | 8.439 | 90 |
| 10 | 9 | 0.351 | 5.450 | 45 |
| 11 | 10 | 0.214 | 8.439 | 90 |
| 12 | 11 | 0.541 | 5.450 | 135 |
| 13 | 12 | 0.400 | 11.177 | 161.565 |
| 14 | 13 | 0.283 | 8.439 | 90 |
| 15 | 14 | 0.189 | 4.219 | 90 |
| 16 | 15 | 0.215 | 8.088 | 26.565 |
| 17 | 16 | 0.269 | 4.219 | 90 |
| 18 | 17 | 0.379 | 16.176 | 153.434 |
| 19 | 18 | 0.438 | 10.901 | 135 |
| 20 | 19 | 0.375 | 4.219 | 90 |
| 21 | 20 | 0.280 | 8.439 | 90 |
| 22 | 21 | 0.236 | 8.439 | 90 |
| 23 | 22 | 0.273 | 5.450 | 45 |
| 24 | 23 | 0.249 | 13.354 | 146.309 |
| 25 | 24 | 0.279 | 11.177 | 161.565 |
| 26 | 25 | 0.231 | 8.439 | 90 |
| 27 | 26 | 0.245 | 5.450 | 135 |
| 28 | 27 | 0.429 | 5.450 | 135 |
| Wave Numbers | Label | Average Wave Height (m) | Average Wave Length (m) | Average Wave Angle (Orientation) (Degree) |
|---|---|---|---|---|
| 29 | 28 | 0.322 | 4.219 | 90 |
| 30 | 29 | 0.235 | 8.439 | 90 |
| 31 | 30 | 0.277 | 8.439 | 90 |
| 32 | 31 | 0.301 | 4.219 | 90 |
| 33 | 32 | 0.475 | 11.177 | 161.565 |
| 34 | 33 | 0.357 | 8.439 | 90 |
| 35 | 34 | 0.387 | 13.097 | 107.489 |
| 36 | 35 | 0.371 | 8.439 | 90 |
| 37 | 36 | 0.361 | 8.439 | 90 |
| 38 | 37 | 0.350 | 8.439 | 90 |
| 39 | 38 | 0.602 | 8.439 | 90 |
| 40 | 39 | 0.393 | 16.176 | 153.434 |
| 41 | 40 | 0.362 | 13.354 | 146.309 |
| 42 | 41 | 0.764 | 8.439 | 90 |
| 43 | 42 | 0.356 | 4.219 | 90 |
| 44 | 43 | 0.283 | 18.726 | 143.130 |
| 45 | 44 | 0.379 | 5.450 | 135 |
| 46 | 45 | 0.342 | 4.219 | 90 |
| 47 | 46 | 0.275 | 13.120 | 108.434 |
| 48 | 47 | 0.403 | 8.439 | 90 |
| 49 | 48 | 0.469 | 8.439 | 90 |
| 50 | 49 | 0.287 | 14.417 | 123.690 |
| 51 | 50 | 0.336 | 12.658 | 90 |
| 52 | 51 | 0.300 | 12.658 | 90 |
| 53 | 52 | 0.790 | 13.120 | 108.434 |
| 54 | 53 | 0.275 | 18.726 | 143.130 |
| 55 | 54 | 0.278 | 16.351 | 135 |
| 56 | 55 | 0.257 | 8.439 | 90 |
| 57 | 56 | 0.310 | 4.219 | 90 |
| Waves Type | Precision (%) | Recall (%) | F1-Measure (%) |
|---|---|---|---|
| Negative wave (−1) | 0.22 | 0.52 | 0.31 |
| Positive wave (+1) | 0.87 | 0.64 | 0.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roshandel, S.; Liu, W.; Wang, C.; Li, J. 3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds. Remote Sens. 2021, 13, 3918. https://doi.org/10.3390/rs13193918
Roshandel S, Liu W, Wang C, Li J. 3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds. Remote Sensing. 2021; 13(19):3918. https://doi.org/10.3390/rs13193918
Chicago/Turabian StyleRoshandel, Sajjad, Weiquan Liu, Cheng Wang, and Jonathan Li. 2021. "3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds" Remote Sensing 13, no. 19: 3918. https://doi.org/10.3390/rs13193918
APA StyleRoshandel, S., Liu, W., Wang, C., & Li, J. (2021). 3D Ocean Water Wave Surface Analysis on Airborne LiDAR Bathymetric Point Clouds. Remote Sensing, 13(19), 3918. https://doi.org/10.3390/rs13193918