
A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover

 , , , ,
, , , ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Geological Background, Data Collections, and Methodology
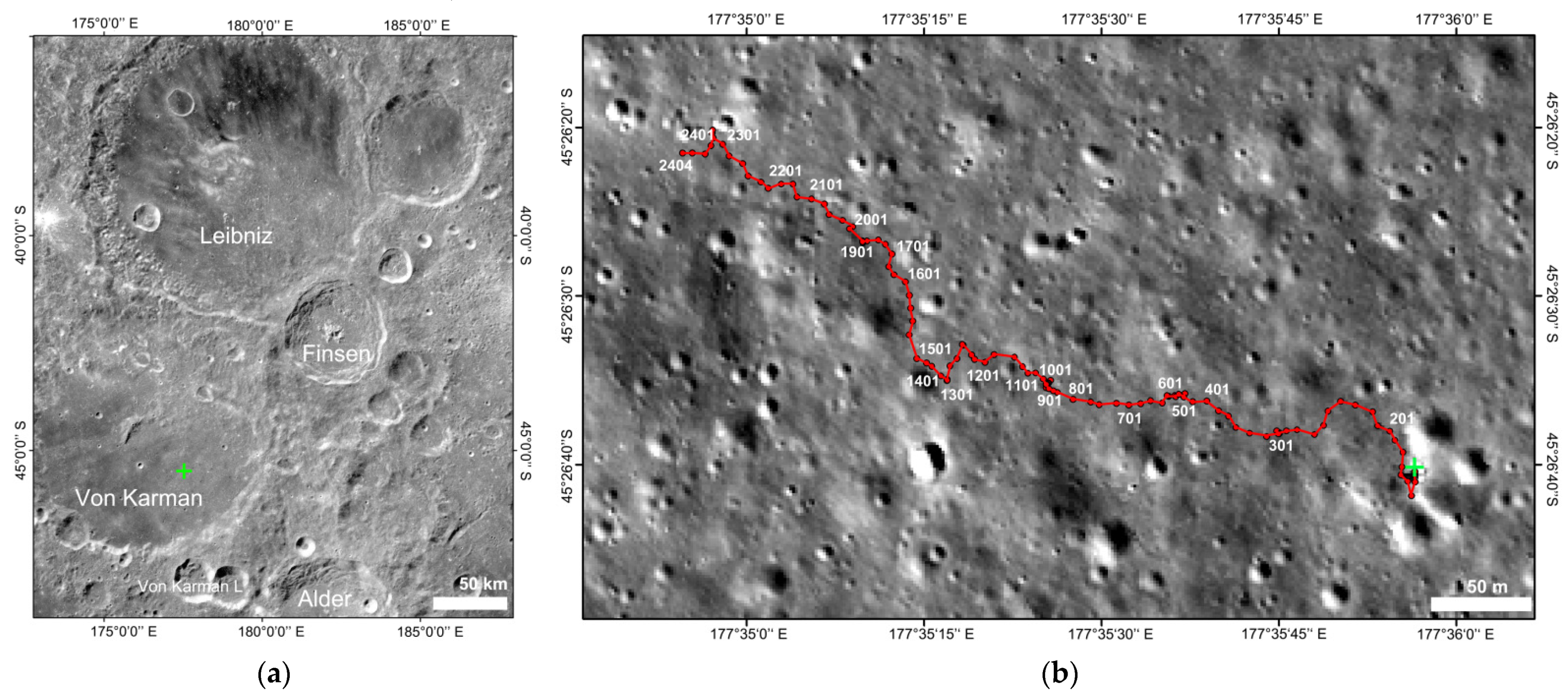
2.1. Geological Context of the CE-4 Landing Site
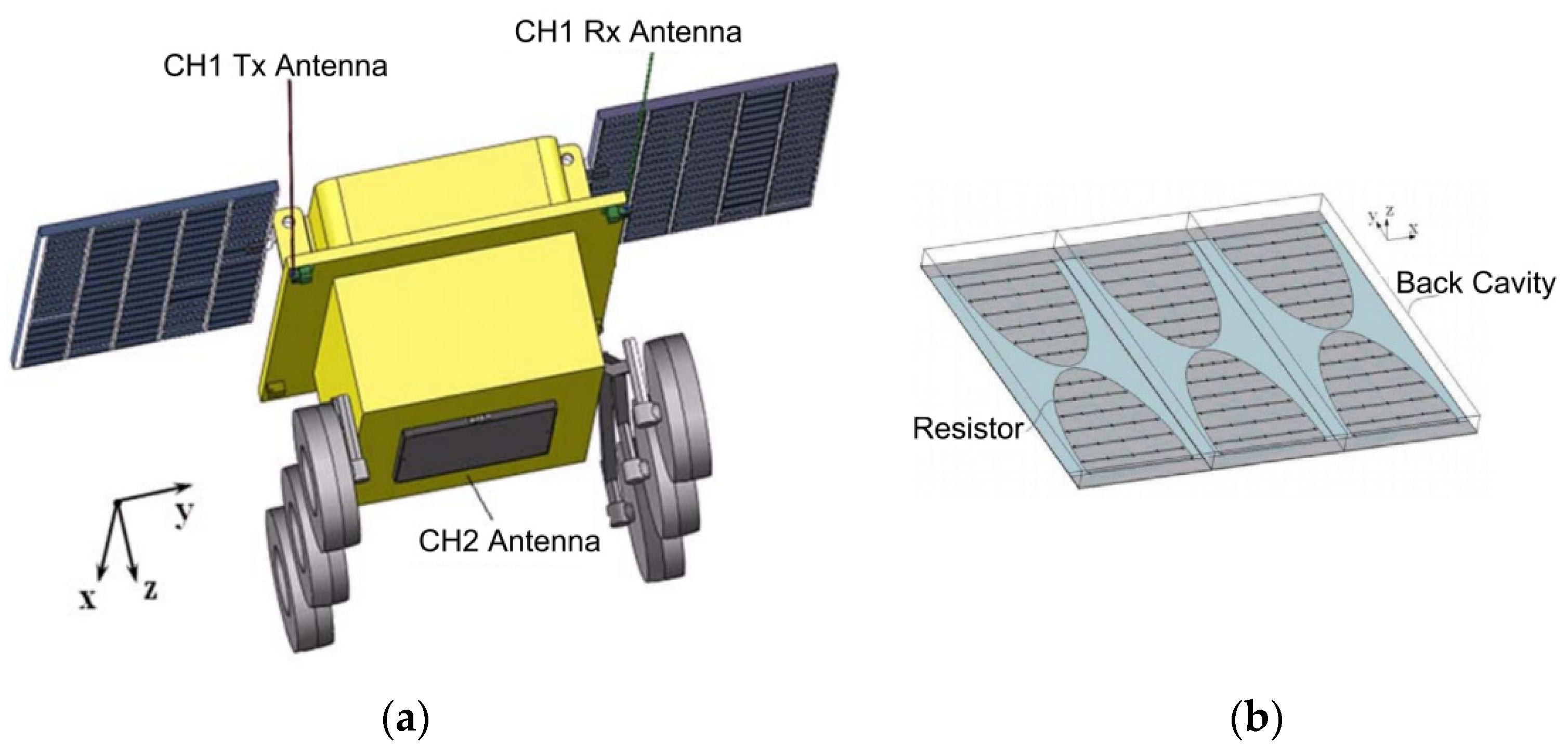
2.2. LPR Data Collections and Processing
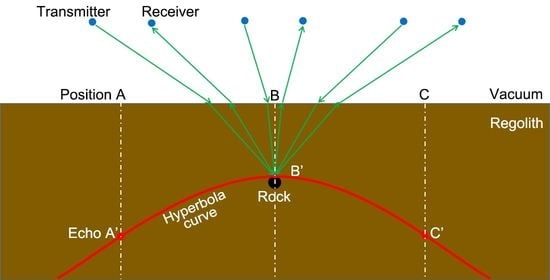
2.3. Traditional Hyperbolic Fitting Method
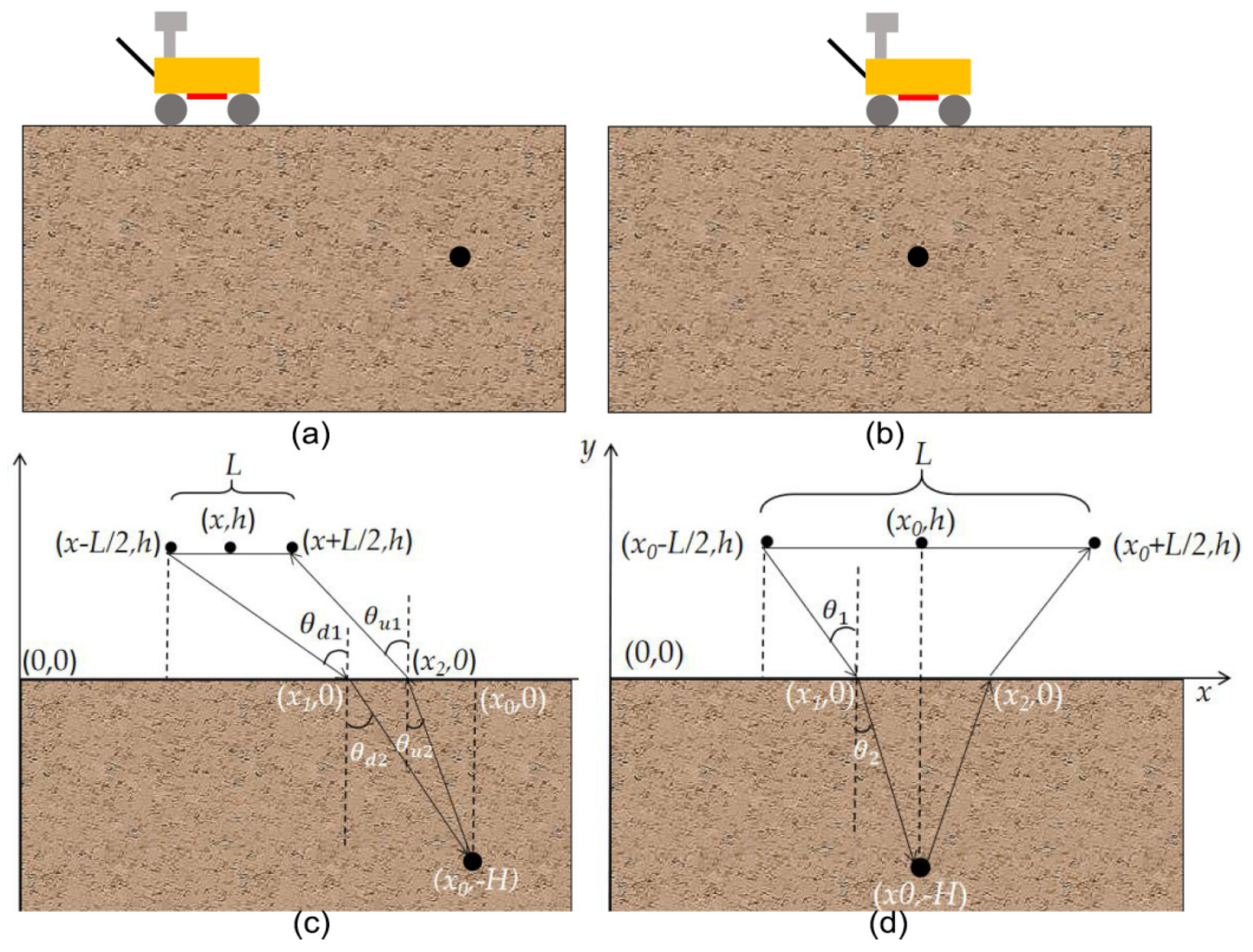
2.4. New Method
2.5. Regolith Modeling and Numerical Simulation
2.5.1. Simplified Modeling
2.5.2. Stochastic Modeling
2.5.3. FDTD Simulation
3. Results
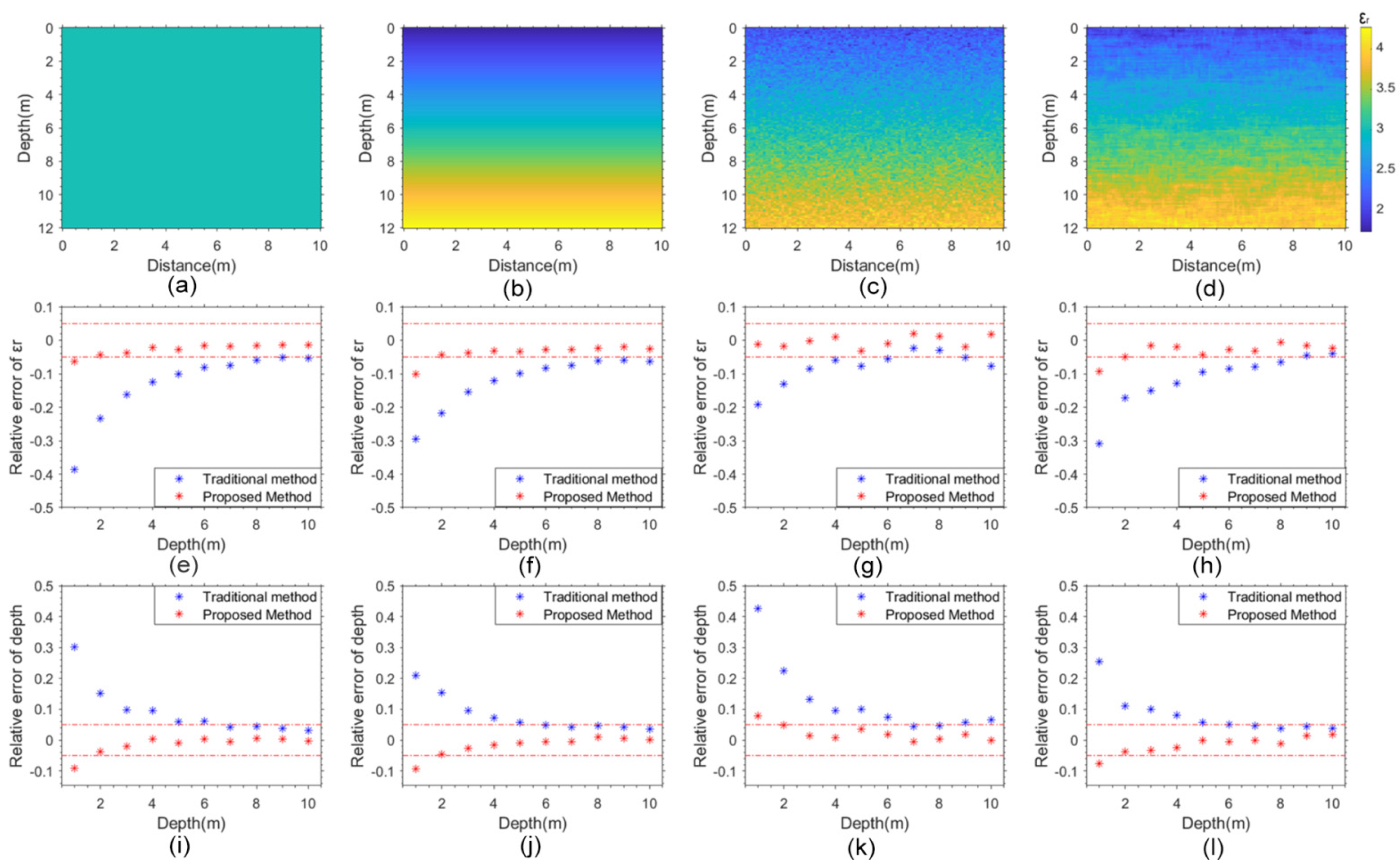
3.1. Numerical Simulation Result
3.1.1. Simulations for Different Models
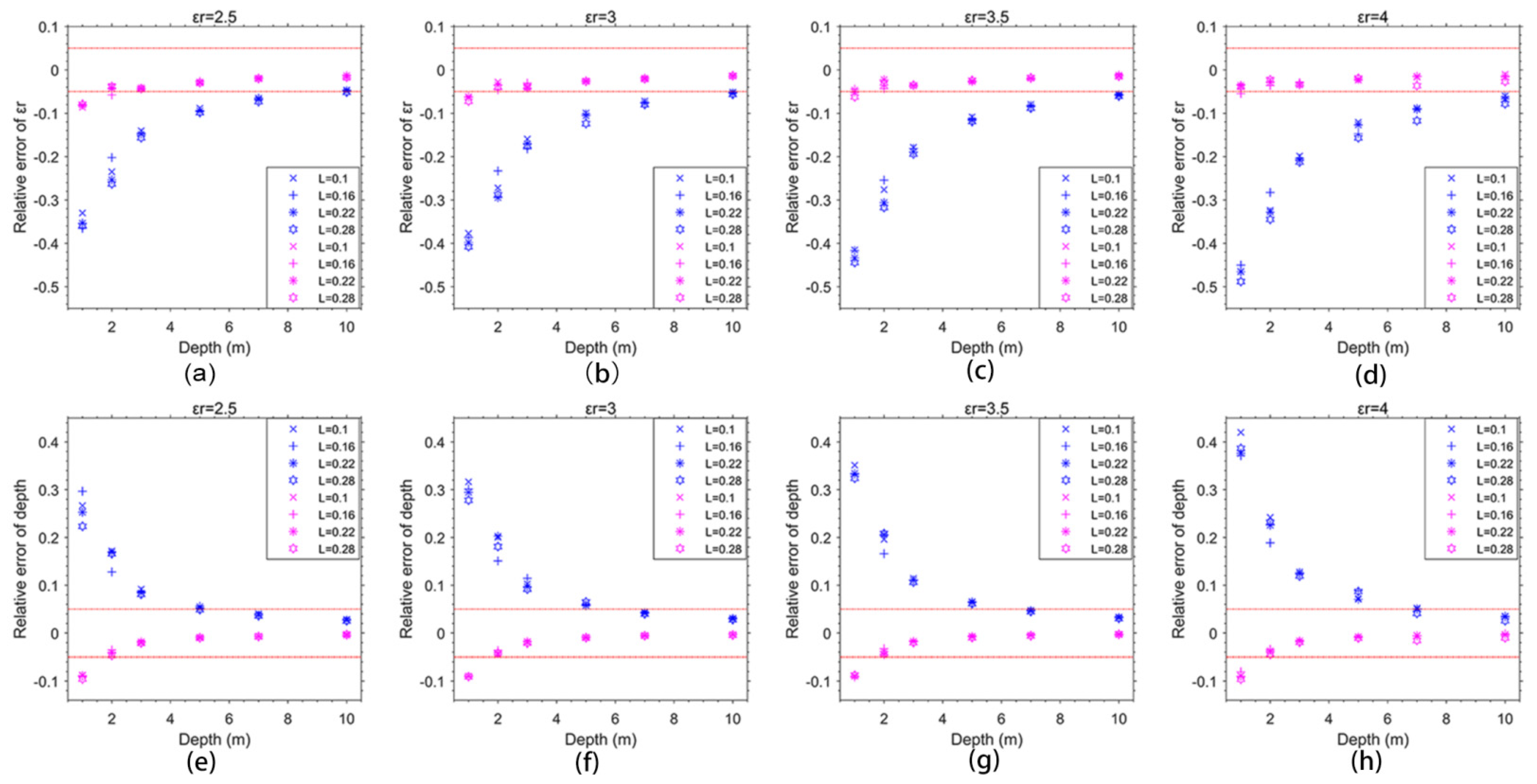
3.1.2. The Influence of Antenna Height and Spacing on Both Methods
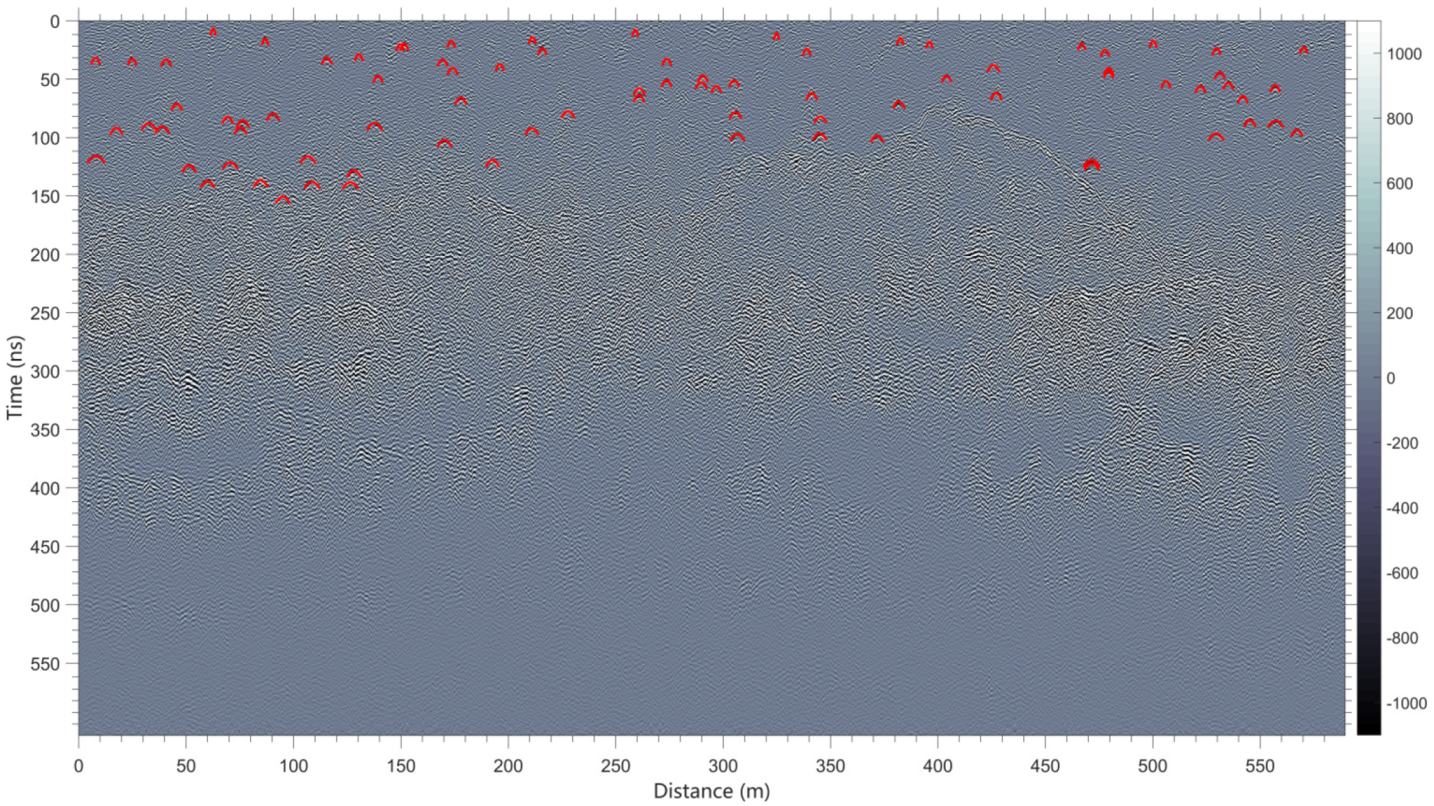
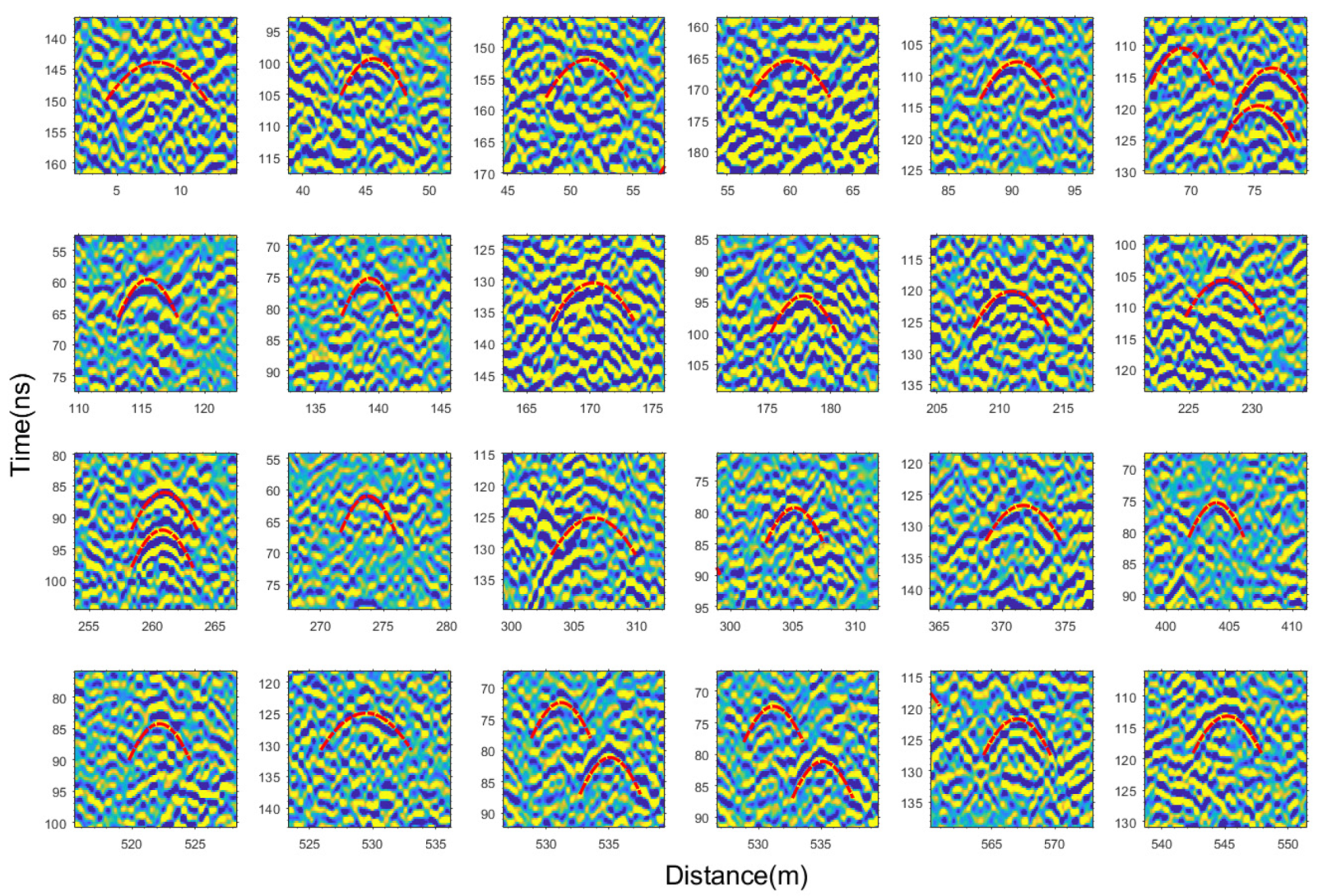
3.2. The high-Frequency LPR Radar Image within the First 24 Lunar Days
4. Discussion
4.1. The Comparison of the Traditional and Proposed Method
4.2. The Influence of Antenna Height and Antenna Spacing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ip, W.H.; Yan, J.; Li, C.; Ouyang, Z. Preface: The Chang’e-3 lander and rover mission to the Moon. Res. Astron. Astrophys. 2014, 14, 1511–1513. [Google Scholar] [CrossRef]
- Li, C.; Liu, D.; Liu, B.; Ren, X.; Liu, J.; He, Z.; Zuo, W.; Zeng, X.; Xu, R.; Tan, X.; et al. Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials. Nature 2019, 569, 378. [Google Scholar] [CrossRef]
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 lunar penetrating radar. Sci. Adv. 2020, 6, 6898. [Google Scholar] [CrossRef] [Green Version]
- Carrier, W.D.; Olhoeft, G.R.; Mendell, W. Physical properties of the lunar surface. In Lunar Source Book; Heiken, G.D., Vaniman, D.T., French, B.M., Eds.; Cambridge University Press: New York, NY, USA, 1991; pp. 475–594. [Google Scholar]
- Campbell, B.A.; Hawke, B.R.; Thompson, T.W. Regolith composition and structure in the lunar maria: Results of long-wavelength radar studies. J. Geophys. Res. 1997, 102, 19307–19320. [Google Scholar] [CrossRef]
- Olhoeft, G.R.; Strangeway, G.D. Dielectric properties of the first 100 meters of the Moon. Earth Planet. Sci. Lett. 1975, 24, 394–404. [Google Scholar] [CrossRef]
- Ono, T.; Kumamoto, A.; Nakagawa, H.; Yamaguchi, Y.; Oshigami, S.; Yamaji, A.; Kobayashi, T.; Kasahara, Y.; Oya, H. Lunar radar sounder observations of subsurface layers under the nearside maria of the Moon. Science 2009, 323, 909–912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phillips, R.J.; Adams, G.F.; Brown, W.E.; Eggleton, R.E.; Jackson, P.; Jordan, R.; Linlor, W.J.; Peeples, W.J.; Porcello, L.J.; Ryu, J. Apollo Lunar Sounder Experiment; Technical Report; NASA: Washington, DC, USA, 1973. [Google Scholar]
- Ding, C.; Li, C.; Xiao, Z.; Su, Y.; Xing, S.; Wang, Y.; Feng, J.; Dai, S.; Xiao, Y.; Yao, M. Layering Structures in the Porous Material Beneath the Chang’e-3 Landing Site. Earth Space Sci. 2020, 7, e2019EA000862. [Google Scholar] [CrossRef]
- Fa, W.; Zhu, M.; Liu, T.; Jeffrey, B.P. Regolith stratigraphy at the Chang’E-3 landing site as seen by lunar penetrating radar. Geophys. Res. Lett. 2015, 42, 10179–10187. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Wu, C.; Zhang, X. Parameters and structure of lunar regolith in Chang ’ E-3 landing area from lunar penetrating radar ( LPR ) data. Icarus 2017, 282, 40–46. [Google Scholar] [CrossRef]
- McKay, D.; Heiken, G.; Basu, A.; Blanford, G.; Simon, S.; Reedy, R.; French, B.; Papike, J. The lunar regolith. In Lunar Source-Book; Heiken, G.D., Vaniman, D.T., French, B.M., Eds.; Cambridge University Press: New York, NY, USA, 1991; pp. 285–356. [Google Scholar]
- Hagfor, T. Backscattering from an undulating surface with application to radar returns from the Moon. Geophys. Res 1964, 97, 13319–13346. [Google Scholar] [CrossRef]
- Fa, W.; Wieczorek, M.A. Regolith thickness over the lunar nearside: Results from earth-based 70-cm Arecibo radar observations. Icarus 2012, 218, 771–787. [Google Scholar] [CrossRef]
- Watters, T.R.; Campbell, B.; Carter, L.; Leuschen, C.; Plaut, J.; Picardi, G.; Orosei, R.; Safaeinili, A.; Clifford, S.; Farrell, W.; et al. Radar sounding of the Medusae fossae formation mars: Equatorial ice or dry, low-density deposits? Science 2007, 318, 1125–1128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Orosei, P.; Rossi, A.; Cantini, F.; Graziella. Radar sounding of Lucus Planum, Mars, by MARSIS. Geophys. Res. 2017, 122, 1405–1418. [Google Scholar] [CrossRef] [Green Version]
- Carter, L.M.; Campbell, B.A.; Holt, J.W.; Phillips, R.; Putzing, N.; Mattei, S.; Seu, R.; Okubo, C.; Egan, A. Dielectric properties of lava flows west of Ascraeus Mons, Mars. Geophys. Res. Lett. 2009, 36, L23204. [Google Scholar] [CrossRef] [Green Version]
- Porcello, L.J.; Zelenka, J.S.; Adams, G.F.; Jackson, P.L.; Jordan, R.L.; Phillips, R.J.; Brown, W.E.; Ward, S.H. The Apollo lunar sounder radar system. Proc. IEEE 2017, 62, 769–788. [Google Scholar] [CrossRef]
- Su, Y.; Fang, G.; Feng, J.; Xing, S.; Ji, Y.; Zhou, B.; Gao, Y.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623–1632. [Google Scholar] [CrossRef]
- Jia, Y.; Zou, Y.; Ping, J.; Xue, C.; Yan, J.; Ning, Y. The scientific objectives and payloads of Chang’E-4 mission. Planet. Space Sci. 2018, 162, 207–215. [Google Scholar] [CrossRef]
- Fang, G.; Zhou, B.; Ji, Y.; Zhang, Q.; Shen, S.; Li, Y.; Guan, H.; Tang, C.; Gao, Y.; Ye, S.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607–1622. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Lin, J.; Hu, Y.; Wang, X.; Sun, X. Simulation of the Lunar Regolith and Lunar-Penetrating Radar Data Processing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Zhang, X.; Tang, Z. Structural analysis of lunar subsurface with ChangE-3 lunar penetrating radar. Planet. Space Sci. 2016, 120, 96–102. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Ding, C.; Xing, S.; Dai, S.; Zou, Y. Dielectric properties estimation of the lunar regolith at CE-3 landing site using lunar penetrating radar data. Icarus Int. J. Sol. Syst. Stud. 2017, 284, 424–430. [Google Scholar] [CrossRef]
- Fa, W. Bulk Density of the Lunar Regolith at the Chang’E-3 Landing Site as Estimated from Lunar Penetrating Radar. Earth Space Sci. 2020, 7, e2019EA000801. [Google Scholar] [CrossRef] [Green Version]
- Ding, C.; Xiao, Z.; Su, Y.; Cui, J. Hyperbolic reflectors determined from peak echoes of ground penetrating radar. Icarus 2021, 358, 114280. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Zhou, B.; Di, Z.; Gao, Y.; Ji, Y. Properties of Lunar Regolith on the Moon’s Farside unveiled by Chang’E Lunar Penetrating Radar. J. Geophys. Res. Planets 2021, 126, e2020JE006564. [Google Scholar] [CrossRef]
- Ding, C.; Cai, Y.; Xiao, Z.; Su, Y. A rocky hill on the continuous ejecta of Ziwei crater revealed by the Chang’e-3 mission. Earth Planet. Phys. 2020, 4, 1–6. [Google Scholar] [CrossRef]
- Dong, Z.; Feng, X.; Zhou, H.; Liu, C.; Zeng, Z.; Li, J.; Liang, W. Properties Analysis of Lunar Regolith at Chang’E-4 Landing Site Based on 3D Velocity Spectrum of Lunar Penetrating Radar. Remote Sens. 2020, 12, 629. [Google Scholar] [CrossRef] [Green Version]
- Hiesinger, H.; Bogert, C.; Pasckert, J.H.; Schmedemann, N.; Robinson, M.S.; Jolliff, B.L.; Petro, N. New Crater Size-Frequency Distribution Measurements of the South Pole-Aitken Basin. In Proceedings of the Lunar and Planetary Science Conference, The Woodlands, TX, USA, 19–23 March 2012. [Google Scholar]
- Melosh, H.J.; Kendall, J.; Horgan, B.; Johnson, C.B.; Bowling, T. South Pole–Aitken basin ejecta reveal the Moon’s upper mantle. Geology 2017, 45, 1063–1066. [Google Scholar] [CrossRef]
- Huang, J.; Xiao, Z.; Flahaut, J.; Martinot, M.; Head, J.; Xiao, X.; Xie, M.; Xiao, L. Geological Characteristics of Von Kármán Crater, Northwestern South Pole-Aitken Basin: Chang’E-4 Landing Site Region. J. Geophys. Res. Planets 2018, 123, 1684–1700. [Google Scholar] [CrossRef] [Green Version]
- Pike, R.J. Depth/diameter relations of fresh lunar craters: Revision from spacecraft data. Geophys. Res. Lett. 1974, 1, 291–294. [Google Scholar] [CrossRef]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X.; et al. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Zhang, X.; Yan, L.; Qi, Y.; Xu, M.; Zhou, B.; Dong, Z.; Di, Z. Comparison of Dielectric Properties and Structure of Lunar Regolith at Chang’e-3 and Chang’e-4 Landing Sites Revealed by Ground-Penetrating Radar. Geophys. Res. Lett. 2019, 46, 12783–12793. [Google Scholar] [CrossRef]
- Xiao, Z.; Ding, C.; Xie, M.; Cai, Y.; Cui, J.; Zhang, K.; Wang, J. Ejecta from the Orientale basin at the Chang’Elanding site. Geophys. Res. Lett. 2021, 48, e2020GL090935. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Wu, B.; Li, Y.; Prieur, N.; Cai, Y.; Su, Y.; Cui, J. Fragments Delivered by Secondary Craters at the Chang’E-4 Landing Site. Geophys. Res. Lett. 2020, 47, e2020GL087361. [Google Scholar] [CrossRef]
- Daniels, D. Ground Penetrating Radar; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Wilcox, B.B.; Robinson, M.S.; Thomas, P.C.; Hawke, B.R. Constraints on the depth and variability of the lunar regolith. Meteorit. Planet. Sci. 2005, 40, 695–710. [Google Scholar] [CrossRef]
- Dai, S.; Su, Y.; Xiao, Y.; Feng, J.; Xing, S.; Ding, C. Echo simulation of lunar penetrating radar: Based on a model of inhomogeneous multilayer lunar regolith structure. Res. Astron. Astrophys. 2014, 12, 1642–1653. [Google Scholar] [CrossRef]
- Ding, C.; Su, Y.; Xing, S.; Dai, S.; Xiao, Y.; Feng, J.; Liu, J.; Li, C. Numerical Simulations of the Lunar Penetrating Radar and Investigations of the Geological Structures of the Lunar Regolith Layer at the CE-3 Landing Site. Int. J. Antennas Propag. 2017, 2017, 3013249. [Google Scholar] [CrossRef]
- Hu, Y.S.; Zeng, Z.F.; Li, J.; Liu, F. Simulation and processing of LPR onboard the rover of Chang’E-3 mission: Based on multilayer lunar regolith structure stochastic media model. In Proceedings of the International Conference on Ground Penetrating Radar, Hong Kong, China, 13–16 June 2016. [Google Scholar]
- Jiang, Z.; Zeng, Z.; Liu, F.; Li, W. Simulation and analysis of GPR signal based on stochastic media model with an ellipsoidal autocorrelation function. J. Appl. Geophys. 2013, 99, 91–97. [Google Scholar] [CrossRef]
- Giannopoulos, A. Modelling ground penetrating radar by GprMax. Constr. Build. Mater 2005, 19, 755–762. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. GprMax: Open source software to simulate electromagnetic wave propagation for ground penetrating radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Su, Y.; Ding, C.; Dai, S.; Liu, C.; Zhang, Z.; Hong, T.; Zhang, Q.; Li, C. A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover. Remote Sens. 2021, 13, 3679. https://doi.org/10.3390/rs13183679
Wang R, Su Y, Ding C, Dai S, Liu C, Zhang Z, Hong T, Zhang Q, Li C. A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover. Remote Sensing. 2021; 13(18):3679. https://doi.org/10.3390/rs13183679
Chicago/Turabian StyleWang, Ruigang, Yan Su, Chunyu Ding, Shun Dai, Chendi Liu, Zongyu Zhang, Tiansheng Hong, Qing Zhang, and Chunlai Li. 2021. "A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover" Remote Sensing 13, no. 18: 3679. https://doi.org/10.3390/rs13183679
APA StyleWang, R., Su, Y., Ding, C., Dai, S., Liu, C., Zhang, Z., Hong, T., Zhang, Q., & Li, C. (2021). A Novel Approach for Permittivity Estimation of Lunar Regolith Using the Lunar Penetrating Radar Onboard Chang’E-4 Rover. Remote Sensing, 13(18), 3679. https://doi.org/10.3390/rs13183679