
Intercalibration of ASCAT Scatterometer Winds from MetOp-A, -B, and -C, for a Stable Climate Data Record

Abstract
1. Introduction
2. Datasets
2.1. ASCAT L1B sigma0
2.2. Moored-Buoy Winds
2.3. MW Radiometer Winds
3. The C-2015 GMF
3.1. Ocean Vector Wind CDR Strategy
3.2. GMF Development
3.3. SST Impact on C-Band Backscatter
3.4. ASCAT-A, -B, and -C Wind Retrievals
4. Fine Calibration Adjustments for Climate-Quality Accuracy
5. Validation of ASCAT Wind Speed and Direction
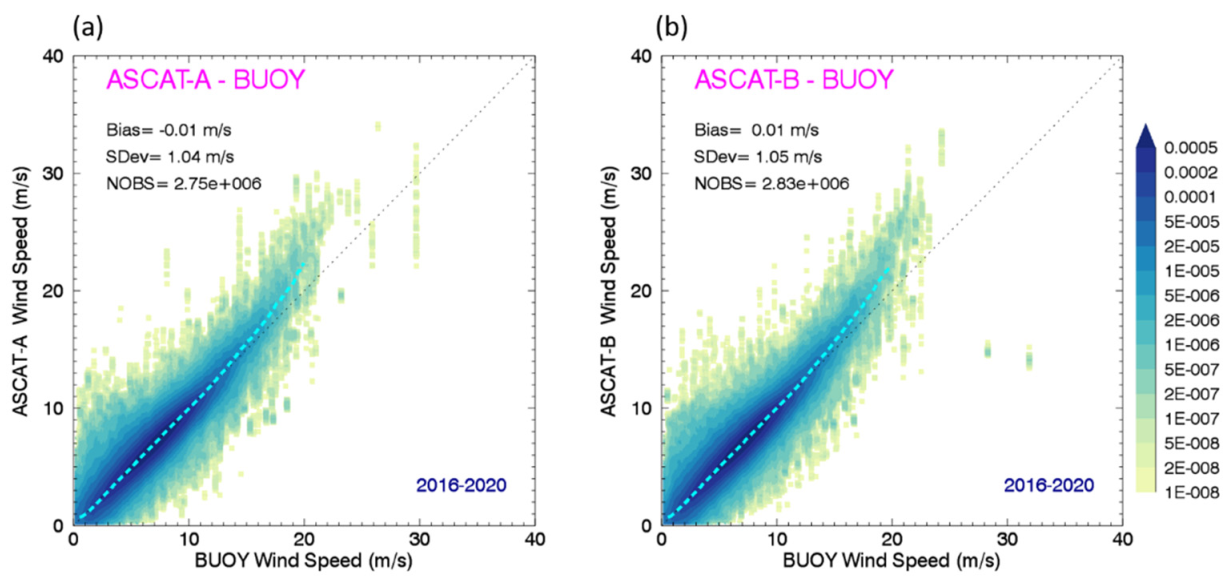
5.1. Validation of Low to Moderate Wind Speeds Using Buoys
5.2. Wind Direction
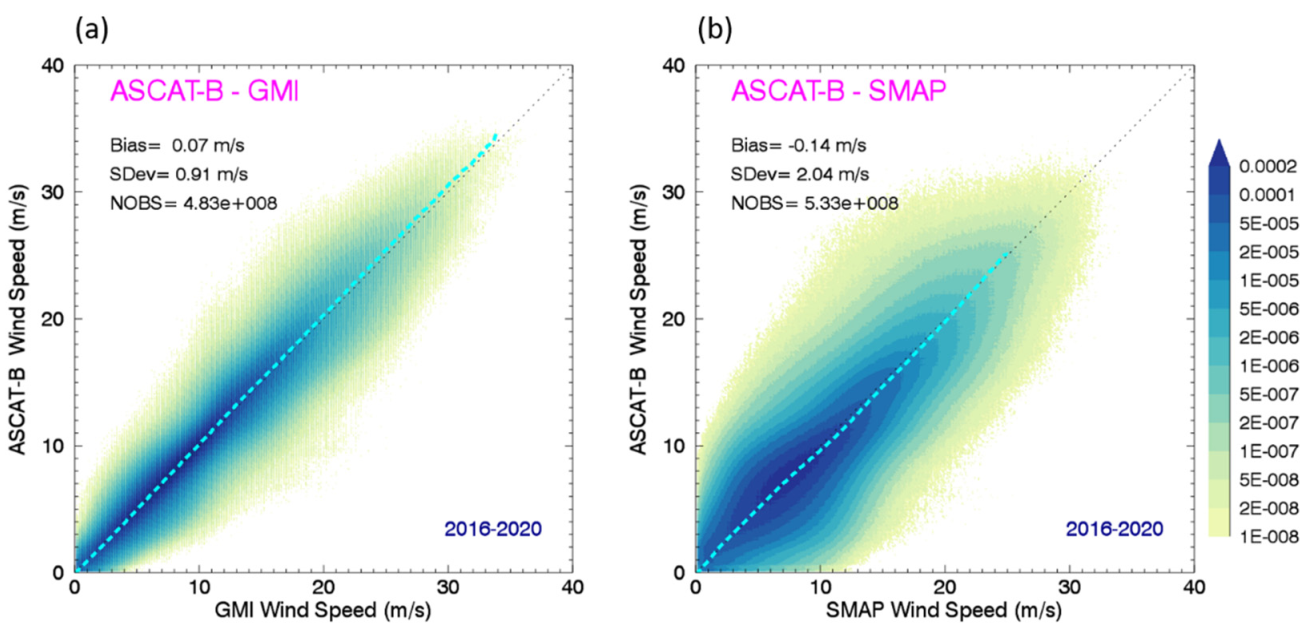
5.3. High Wind Speed Validation Using Radiometers
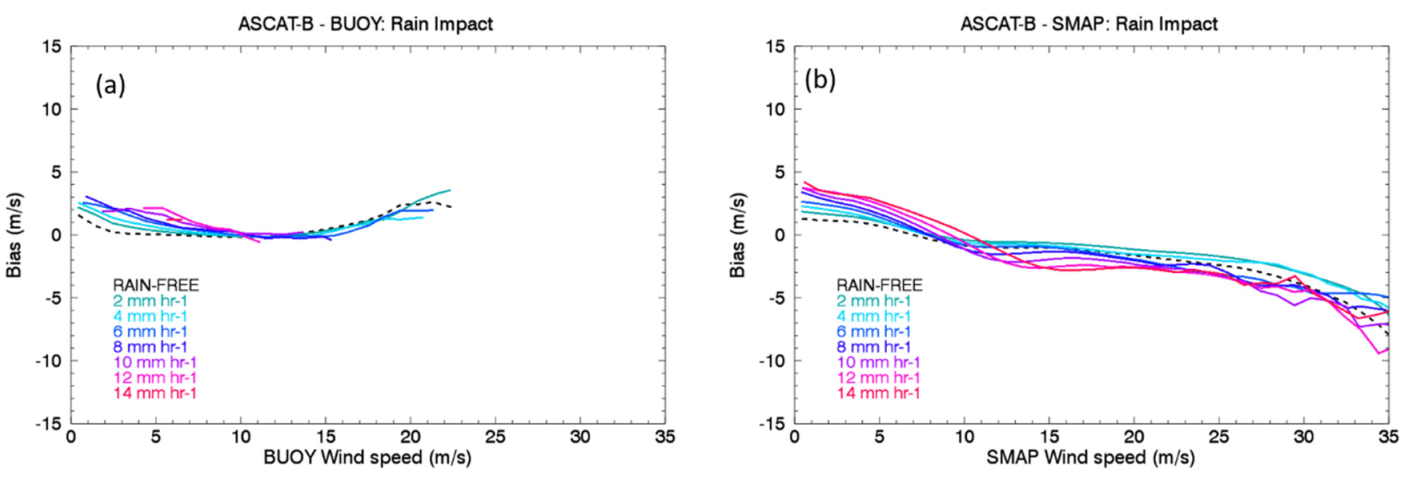
6. Rain Impact
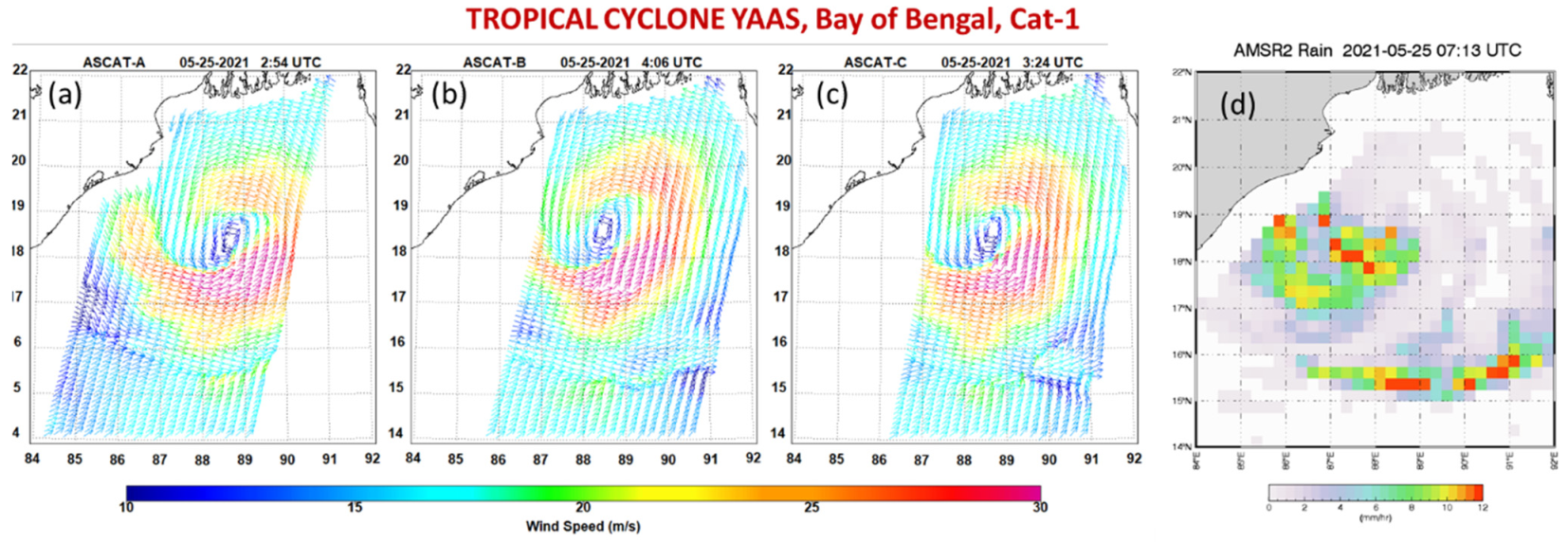
7. Example: ASCAT Wind Retrievals in Tropical Cyclones (TCs)
8. Summary and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Meteorological Organization. Systematic Observation Requirements for Satellite-Based Data Products for Climate; Tech. Rep. GCOS-154; WMO: Geneva, Switzerland, 2011. [Google Scholar]
- Held, I.M.; Soden, B.J. Robust responses of the hydrological cycle to global warming. J. Clim. 2006, 19, 5686–5699. [Google Scholar] [CrossRef]
- Wentz, F.J.; Ricciardulli, L.; Hilburn, K.; Mears, C. How much more rain will global warming bring? Science 2007, 317, 233–235. [Google Scholar] [CrossRef]
- Wentz, F.J.; Ricciardulli, L.; Rodriguez, E.; Stiles, B.W.; Bourassa, M.A.; Long, D.G.; Hoffman, R.N.; Stoffelen, A.; Verhoef, A.; O’Neill, L.W.; et al. Evaluating and extending the ocean wind climate data record. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2165–2185. [Google Scholar] [CrossRef]
- Wentz, F.J.; Ricciardulli, L. Improvements to the Vector Wind Climate Record Using RapidScat as a Common Reference and Aquarius/SMAP for High. Winds in Rain; Remote Sens. Syst. Tech. Report 111313; Remote Sensing Systems: Santa Rosa, CA, USA, 2013; pp. 1–20. Available online: https://images.remss.com/papers/rsstech/2013_111313_Wentz_OVW_CDR.pdf (accessed on 2 August 2021).
- Stoffelen, A.; Verhoef, A.; de Kloe, J.; Verspeek, J.; Vogelzang, J.; Belmonte, M.; Trindade, A. Scatterometer stress-equivalent winds for ocean and climate applications. In Proceedings of the 2015 EUMETSAT Meteorological Satellite Conference, Toulouse, France, 21–25 September 2015. [Google Scholar]
- Ricciardulli, L.; Wentz, F.J. A scatterometer geophysical model function for climate-quality winds: QuikSCAT Ku-2011. J. Atmos. Ocean. Technol. 2015, 32, 1829–1846. [Google Scholar] [CrossRef]
- Ricciardulli, L.; Wentz, F. Bringing Consistency Among Scatterometer Winds Using Radiometer Observations. In Proceedings of the IOVWST Meeting, Portland, OR, USA, 19–21 May 2015; Available online: https://mdc.coaps.fsu.edu/scatterometry/meeting/docs/2015/ClimateDataRecordDevelopmentAndAnalysis/Ricciardulli_ovwst_2015.pdf (accessed on 2 August 2021).
- Kent, E.C.; Rayner, N.A.; Berry, D.I.; Eastman, R.; Grigorieva, V.G.; Huang, B.; Kennedy, J.J.; Smith, S.R.; Willett, K.M. Observing requirements for Long-Term Climate Records at the Ocean Surface. Front. Mar. Sci. 2019, 6, 441. [Google Scholar] [CrossRef]
- Verhoef, A.; Vogelzang, J.; Verspeek, J.; Stoffelen, A. Long-Term Scatterometer Wind Climate Data Records. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2186–2194. [Google Scholar] [CrossRef]
- Hristova-Veleva, S.; Bourassa, M.; Fore, A.; Kilpatrick, T.; Moroni, D.; O’Neill, L.; Rodriguez, E.; Stiles, B.; Turk, F.J.; Vandemark, D.; et al. Creating an extended and consistent ESDR of the ocean surface winds, stress and their dynamically-significant derivatives for the period 1999–2022: Step 1-Product Formulation. In Proceedings of the IOVWST meeting 2019, Portland, ME, USA, 29–31 May 2019; Available online: https://mdc.coaps.fsu.edu/scatterometry/meeting/docs/2019/IOVWST_20190529-1640-Hristova-Veleva.pdf (accessed on 2 August 2021).
- Young, I.R.; Zieger, S.; Babanin, A.V. Global trends in wind speed and wave height. Science 2011, 332, 451–455. [Google Scholar] [CrossRef]
- Wentz, F.; Ricciardulli, L. Comment on Global trends of wind speed and wave height. Science 2011, 334, 905. [Google Scholar] [CrossRef]
- Young, I.R.; Ribal, A. Multiplatform evaluation of global trends in wind speed and wave height. Science 2019, 364, 548–552. [Google Scholar] [CrossRef] [PubMed]
- Lungu, T.; Callahan, P.S. QuikSCAT Science Data Product User’s Manual: Overview and Geophysical Data Products; Version 3.0; JPL Tech. Rep. D-18053-Rev. A; JPL: Pasadena, CA, USA, 2006; p. 91. Available online: https://rda.ucar.edu/datasets/ds744.2/docs/QSUG_v3.pdf (accessed on 12 July 2021).
- Figa-Saldaña, J.; Wilson, J.J.W.; Attema, E.; Gelsthorpe, R.; Drinkwater, M.R.; Stoffelen, A. The Advanced scatterometer (ASCAT) on the meteorological operational (MetOp) platform: A follow on for the European wind scatterometers. Can. J. Remote Sens. 2002, 28, 404–412. [Google Scholar] [CrossRef]
- Linow, S.; Anderson, C.; Ticconi, F.; Wilson, J.J. Status of EUMETSAT scatterometer missions. In Proceedings of the IOVWST Meeting, Portland, ME, USA, 29–31 May 2019; Available online: https://mdc.coaps.fsu.edu/scatterometry/meeting/docs/2019/IOVWST_20190529-0935-Linow.pdf (accessed on 12 July 2021).
- EUMETSAT. MetOp-SG Program. 2021. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/m/metop-sg (accessed on 14 July 2021).
- Stoffelen, A.; Aaboe, S.; Calvet, J.; Cotton, J.; De Chiara, G.; Saldana, J.F.; Mouche, A.A.; Portabella, M.; Scipal, K.; Wagner, W. Scientific developments and the EPS-SG scatterometer. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2086–2097. [Google Scholar] [CrossRef]
- Martin, S. An Introduction to Ocean. Remote Sensing, 2nd ed.; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar] [CrossRef]
- Manaster, A.; Ricciardulli, L.; Meissner, T. Validation of High Ocean Surface Winds from Satellites Using Oil Platform Anemometers. J. Atmos. Ocean. Technol. 2019, 36, 803–818. [Google Scholar] [CrossRef]
- Tournadre, J.; Quilfen, Y. Impact of rain cell on scatterometer data: 1. Theory and modeling. J. Geophys. Res. 2003, 108, 3225. [Google Scholar] [CrossRef]
- Verhoef, A.; Portabella, M.; Stoffelen, A.; Hersbach, H. CMOD5.n℄The CMOD5 GMF for Neutral Winds. Tech. Note SAF/OSI/CDOP/KNMI/TEC/TN/165. 2008. Available online: https://digital.csic.es/bitstream/10261/156198/1/Verhoef_et_al_2008.pdf (accessed on 13 September 2021).
- Stoffelen, A.; Verspeek, J.A.; Vogelzang, J.; Verhoef, A. The CMOD7 geophysical model function for ASCAT and ERS wind retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2123–2134. [Google Scholar] [CrossRef]
- SAF; OSI; EARS Winds Team. ASCAT Wind Product USER Manual, Version 1.16. 2019. Available online: https://scatterometer.knmi.nl/publications/pdf/ASCAT_Product_Manual.pdf (accessed on 12 July 2021).
- Soisuvarn, S.; Jelenak, Z.; Chang, P.S.; Alsweiss, S.O.; Zhu, Q. CMOD5.H—A High Wind Geophysical Model Function for C-Band Vertically Polarized Satellite Scatterometer Measurements. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3744–3760. [Google Scholar] [CrossRef]
- Chang, P.S.; Jelenak, Z.; Soisuvarn, S.; Zhu, Q.; Legg, G.; Augenbaum, J. ASCAT NRT Data Processing and Distribution at NOAA/NESDIS. Available online: https://www-cdn.eumetsat.int/files/2020-04/pdf_conf_p50_s3_12_legg_p.pdf (accessed on 12 July 2021).
- EUMETSAT. ASCAT. Available online: https://www.eumetsat.int/ascat (accessed on 12 July 2021).
- EUMETSAT. ASCAT Product Guide V5B; Doc. No. EUM/OPS-EPS/MAN/04/0028; EUMETSAT: Darmstadt, Germany, 2017; 164p, Available online: http://www.eumetsat.int (accessed on 14 July 2021).
- Anderson, C.; Figa, J.; Bonekamp, H.; Wilson, J.J.W.; Verspeek, J.; Stoffelen, A.; Portabella, M. Validation of backscatter measurements from the advanced scatterometer on MetOp-A. J. Atmos. Ocean. Technol. 2011, 29, 77–88. [Google Scholar] [CrossRef]
- Wilson, J.J.W.; Anderson, C.; Baker, M.A.; Bonekamp, H.; Figa Saldaña, J.; Dyer, R.G.; Lerch, J.A.; Kayal, G.; Gelsthorpe, R.V.; Brown, M.A.; et al. Radiometric calibration of the advanced wind scatterometer radar ASCAT carried onboard the METOP-A satellite. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3236–3255. [Google Scholar] [CrossRef]
- Anderson, C.; Figa-Saldana, J.; Wilson, J.J.W.; Ticconi, F. Validation and cross-validation methods for ASCAT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2232–2239. [Google Scholar] [CrossRef]
- Ticconi, F.; Anderson, C.; Linow, S.; Wilson, J.J.W. ASCAT-C Commissioning: First Cross-Comparison and Validation Results. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 8777–8779. [Google Scholar]
- McPhaden, M.J.; Busalacchi, A.J.; Cheney, R.; Donguy, J.R.; Gage, K.S.; Halpern, D.; Ji, M.; Julian, P.; Meyers, G.; Mitchum, G.T.; et al. The Tropical Ocean-Global Atmosphere observing system: A decade of progress. J. Geophys. Res. Ocean. 1998, 103, 14169–14240. [Google Scholar] [CrossRef]
- Bourlès, B.; Lumpkin, R.; McPhaden, M.J.; Hernandez, F.; Nobre, P.; Campos, E.; Yu, L.; Planton, S.; Busalacchi, A.; Moura, A.D.; et al. The PIRATA program: History, accomplishments, and future directions. Bull. Am. Meteorol. Soc. 2008, 89, 1111–1126. [Google Scholar] [CrossRef]
- McPhaden, M.J.; Meyers, G.; Ando, K.; Masumoto, Y.; Murty, V.S.N.; Ravichandran, M.; Syamsudin, F.; Vialard, J.; Yu, L.; Yu, W. RAMA: The research moored array for African–Asian–Australian monsoon analysis and prediction. Bull. Am. Meteorol. Soc. 2009, 90, 459–480. [Google Scholar] [CrossRef]
- Liu, W.T.; Tang, W. Equivalent Neutral Wind; Jet Propul. Lab: Pasadena, CA, USA, 1996; pp. 1–22. [Google Scholar]
- Mears, C.A.; Smith, D.K.; Wentz, F.J. Comparison of Special Sensor Microwave Imager and Buoy-Measured Wind Speeds From 1987–1997. J. Geophys. Res. 2001, 106, 11719–11729. [Google Scholar] [CrossRef]
- Schlundt, M.; Farrar, J.T.; Bigorre, S.P.; Plueddemann, A.J.; Weller, R.A. Accuracy of wind observations from open-ocean buoys: Correction for flow distortion. J. Atmos. Ocean. Technol. 2020, 37, 687–703. [Google Scholar] [CrossRef]
- Wentz, F.J. A well-calibrated ocean algorithm for special sensor microwave/imager. J. Geophys. Res. 1997, 102, 8703–8718. [Google Scholar] [CrossRef]
- Kummerow, C.; Barnes, W.; Kozu, T.; Shiue, J.; Simpson, J. The tropical rainfall measuring mission (TRMM) sensor package. J. Atmos. Ocean. Technol. 1998, 15, 809–817. [Google Scholar] [CrossRef]
- Wentz, F.J. A 17-yr climate record of environmental parameters derived from the Tropical Rainfall Measuring Mission (TRMM) Microwave Imager. J. Clim. 2015, 28, 6882–6902. [Google Scholar] [CrossRef]
- Draper, D.W.; Newell, D.A.; Wentz, F.J.; Krimchansky, S.; Skofronick-Jackson, G.M. The global precipitation measurement (GPM) microwave imager (GMI): Instrument overview and early on-orbit performance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3452–3462. [Google Scholar] [CrossRef]
- Wentz, F.J.; Draper, D. On-orbit absolute calibration of the global precipitation measurement microwave imager. J. Atmos. Ocean. Technol. 2016, 33, 1393–1412. [Google Scholar] [CrossRef]
- Wentz, F.J. SSM/I version-7 calibration report. Remote Sens. Syst. Tech. Rep. 2013, 11012, 1613–1627. [Google Scholar]
- Meissner, T.; Wentz, F.J. The emissivity of the ocean surface between 6 and 90 GHz over a large range of wind speeds and earth incidence angles. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3004–3026. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J. Wind-vector retrievals under rain with passive satellite microwave radiometers. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3065–3083. [Google Scholar] [CrossRef]
- Meissner, T.; Ricciardulli, L.; Wentz, F.J. Capability of the SMAP Mission to Measure Ocean Surface Winds in Storms. Bull. Am. Meteorol. Soc. 2017, 98, 1660–1677. [Google Scholar] [CrossRef]
- Meissner, T.; Ricciardulli, L.; Manaster, A. Tropical Cyclone Wind Speeds from AMSR and WindSat: Algorithm Development and Testing. Remote Sens. 2021, 13, 1641. [Google Scholar] [CrossRef]
- Manaster, A.; Ricciardulli, L.; Meissner, T. Tropical Cyclone Winds from WindSat, AMSR2, and SMAP: Comparison with the HWRF Model. Remote Sens. 2021, 13, 2347. [Google Scholar] [CrossRef]
- Wentz, F.J.; Smith, D.K. A model function for the ocean-normalized radar cross section at 14 GHz derived from NSCAT observations. J. Geophys. Res. Ocean. 1999, 104, 11499–11514. [Google Scholar] [CrossRef]
- Ricciardulli, L. ASCAT on Metop-A Data Product Update Notes: V2.1 Data Release; Tech. Rep. 040416; Remote Sensing Systems: Santa Rosa, CA, USA, 2016. [Google Scholar]
- Bentamy, A.; Grodsky, S.A.; Chapron, B.; Carton, J.A. Compatibility of C-and Ku-band scatterometer winds: ERS-2 and QuikSCAT. J. Mar. Syst. 2013, 117, 72–80. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Fois, F.; Verhoef, A.; Zhao, C.; Lin, M.; Chen, G. SST dependence of Ku-and C-band backscatter measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2135–2146. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zhao, C.; Vogelzang, J.; Verhoef, A.; Verspeek, J.; Lin, M.; Chen, G. An SST-dependent Ku-band geophysical model function for RapidScat. J. Geophys. Res. Ocean. 2017, 122, 3461–3480. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zhang, B.; He, Y.; Lin, W.; Li, X. Inconsistencies in scatterometer wind products based on ASCAT and OSCAT-2 collocations. Remote Sens. Environ. 2019, 225, 207–216. [Google Scholar] [CrossRef]
- Ricciardulli, L.; Wentz, F. SST Impact on RapidScat and QuikSCAT Measurements. In Proceedings of the International Ocean Vector Wind Science Team Meeting, La Jolla, CA, USA, 2–4 May 2017; Available online: https://mdc.coaps.fsu.edu/scatterometry/meeting/docs/2017/docs/Tuesday/afternoon/SecondSession/400_Ricciardulli_KuSST_ovwst_2017_posted.pdf (accessed on 12 July 2021).
- Reynolds, R.W.; Rayner, N.A.; Smith, T.M.; Stokes, D.C.; Wang, W. An Improved In Situ and Satellite SST Analysis for Climate. J. Clim. 2002, 15, 1609–1625. [Google Scholar] [CrossRef]
- Verspeek, J.; Stoffelen, A. ASCAT-A Anomalies in September and October 2014; EUMETSAT Ocean and Sea Ice SAF Report: SAF/OSI/CDOP2/KNMI/TEC/RP/236; EUMETSAT: Darmstadt, Germany, 2015. [Google Scholar]
- Belmonte-Rivas, M.; Stoffelen, A.; Verspeek, J.; Verhoef, A.; Neyt, X.; Anderson, C. Cone metrics: A new tool for the intercalibration of scatterometer records. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2. [Google Scholar] [CrossRef][Green Version]
- Stoffelen, A. Toward the true near-surface wind speed: Error modeling and calibration using triple collocation. J. Geophys. Res. 1998, 103, 7755–7766. [Google Scholar] [CrossRef]
- McColl, K.A.; Vogelzang, J.; Konings, A.G.; Entekhabi, D.; Piles, M.; Stoffelen, A. Extended triple collocation: Estimating errors and correlation coefficients with respect to an unknown target. Geophys. Res. Lett. 2014, 41, 6229–6236. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J.; Ricciardulli, L. 2014: The emission and scattering of L-band microwave radiation from rough ocean surfaces and wind speed measurements from the Aquarius sensor. J. Geophys. Res. Ocean. 2014, 119, 6499–6522. [Google Scholar] [CrossRef]
- Fernandez, D.; Chang, P.; Carswell, J.; Contreras, R.; Chu, T. Spectral Behavior of the Ocean Surface Backscatter and the Atmospheric Boundary Layer at C- and Ku-band under High wind and Rain Conditions. In Proceedings of the 2006 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Denver, CO, USA, 31 July–4 August 2006; pp. 1871–1874. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A.; Lin, W.; Turiel, A.; Verhoef, A.; Verspeek, J.; Ballabrera-Poy, J. Rain effects on ASCAT-retrieved winds: Toward an improved quality control. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2495–2506. [Google Scholar] [CrossRef]
- Lin, W.; Portabella, M.; Stoffelen, A.; Verhoef, A.; Turiel, A. ASCAT wind quality control near rain. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4165–4177. [Google Scholar] [CrossRef]
- Owen, M.P.; Long, D.G. Towards an improved wind and rain backscatter model for ASCAT. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 2531–2534. [Google Scholar] [CrossRef]
- Stiles, B.W.; Yueh, S.H. Impact of rain on spaceborne Ku-band wind scatterometer data. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1973–1983. [Google Scholar] [CrossRef]
- Draper, D.W.; Long, D.G. Evaluating the effect of rain on SeaWinds scatterometer measurements. J. Geophys. Res. Ocean. 2004, 109. [Google Scholar] [CrossRef]
- Lin, W.; Portabella, M.; Stoffelen, A.; Vogelzang, J.; Verhoef, A. ASCAT wind quality under high subcell wind variability conditions. J. Geophys. Res. Ocean. 2015, 120, 5804–5819. [Google Scholar] [CrossRef]
- King, G.P.; Portabella, M.; Lin, W.; Stoffelen, A. Correlating Extremes in Wind and Stress Divergence with Extremes in Rain over the Tropical Atlantic, Ocean. and Sea Ice SAF Scientific Report OSI_AVS_15_02 (v1.0). 2017. Available online: https://digital.csic.es/bitstream/10261/158566/1/King_et_al_2017.pdf (accessed on 14 July 2021).
- Knaff, J.A.; Sampson, C.R.; Kuchas, M.; Slocum, C.J.; Brennan, M.J.; Meissner, T.; Ricciardulli, L.; Mouche, A.; Reul, N.; Morris, M.; et al. A practical guide to estimating tropical cyclone surface winds: History, current status, emerging technologies, and a look to the future. Trop. Cyclone Res. Rev. 2021. in Press. [Google Scholar]
- Velden, C.S.; Herndon, D. A consensus approach for estimating tropical cyclone intensity from meteorological satellites: Satcon. Weather Forecast. 2020, 35, 1645–1662. [Google Scholar] [CrossRef]
- Lin, C.-C.; Lengert, W.; Attema, E. Three generations of C-band wind scatterometer systems from ERS-1/2 to MetOp/ASCAT, and MetOp second generation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 10, 2098–2122. [Google Scholar] [CrossRef]
- Attema, E.P. The Active Microwave Instrument on-board the ERS-1 satellite. Proc. IEEE 1991, 79, 791–799. [Google Scholar] [CrossRef]
- Portabella, M.; Stoffelen, A.; Verspeek, J.; Verhoef, A.; Vogelzang, J. ASCAT scatterometer ocean calibration. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 2539–2542. [Google Scholar]
- Verspeek, J.; Stoffelen, A.; Verhoef, A.; Portabella, M. Improved ASCAT wind retrieval using NWP ocean calibration. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2488–2494. [Google Scholar] [CrossRef][Green Version]
- Soisuvarn, S.; Jelenak, Z.; Chang, P.S.; Zhu, Q.; Sindic-Rancic, G. Validation of NOAA’s near real-time ASCAT ocean vector winds. In Proceedings of the IGARSS 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 1. [Google Scholar]
- Stoffelen, A.; Mouche, A.A.; Polverari, F.; van Zadelhoff, G.J.; Sapp, J.; Portabella, M.; Chang, P.; Lin, W.; Jelenak, Z. C-Band High and Extreme-Force Speeds (CHEFS)-Final Report; EUMETSAT: Darmstadt, Germany, 2020. [Google Scholar]
- Polverari, F.; Portabella, M.; Lin, W.; Sapp, J.W.; Stoffelen, A.; Jelenak, Z.; Chang, P.S. On High and Extreme Wind Calibration Using ASCAT. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zou, J.; Lin, W.; Verhoef, A.; Zhang, Y.; He, Y.; Lin, M. Validation of new sea surface wind products from Scatterometers Onboard the HY-2B and MetOp-C satellites. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4387–4394. [Google Scholar] [CrossRef]
- Azorin-Molina, C.; Dunn, R.J.H.; Ricciardulli, L.; Mears, C.A.; McVicar, T.R.; Nicolas, J.P. Land and ocean surface winds. Bull. Am. Meteorol. Soc. 2021, 102, S63–S67. [Google Scholar] [CrossRef]
- Hristova-Veleva, S.M.; Rodriguez, E.; Haddad, Z.; Stiles, B.; Turk, F.J. Hadley cell trends and variability as determined from scatterometer observations: How Rapidscat will help establishing reliable long-term record. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1211–1214. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Year 2016 74,036 Collocations | Bias (m/s) | St Dev (m/s) |
| ASCAT-A—Buoys | 0.00 | 1.02 |
| ASCAT-B—Buoys | 0.03 | 0.89 |
| ASCAT-A—NCEP | 0.37 | 1.09 |
| ASCAT-B—NCEP | 0.40 | 1.10 |
| NCEP—Buoys | −0.37 | 1.26 |
| (b) Year 2020 2681 Collocations | Bias (m/s) | St Dev (m/s) |
| ASCAT-A—Buoys | 0.15 | 0.98 |
| ASCAT-B—Buoys | 0.18 | 0.92 |
| ASCAT-C—Buoys | 0.16 | 1.00 |
| ASCAT-A—NCEP | 0.72 | 1.22 |
| ASCAT-B—NCEP | 0.75 | 1.17 |
| ASCAT-C—NCEP | 0.73 | 1.20 |
| NCEP—Buoys | −0.57 | 1.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ricciardulli, L.; Manaster, A. Intercalibration of ASCAT Scatterometer Winds from MetOp-A, -B, and -C, for a Stable Climate Data Record. Remote Sens. 2021, 13, 3678. https://doi.org/10.3390/rs13183678
Ricciardulli L, Manaster A. Intercalibration of ASCAT Scatterometer Winds from MetOp-A, -B, and -C, for a Stable Climate Data Record. Remote Sensing. 2021; 13(18):3678. https://doi.org/10.3390/rs13183678
Chicago/Turabian StyleRicciardulli, Lucrezia, and Andrew Manaster. 2021. "Intercalibration of ASCAT Scatterometer Winds from MetOp-A, -B, and -C, for a Stable Climate Data Record" Remote Sensing 13, no. 18: 3678. https://doi.org/10.3390/rs13183678
APA StyleRicciardulli, L., & Manaster, A. (2021). Intercalibration of ASCAT Scatterometer Winds from MetOp-A, -B, and -C, for a Stable Climate Data Record. Remote Sensing, 13(18), 3678. https://doi.org/10.3390/rs13183678