1. Introduction
Reliable detection of caves is required for both terrestrial and planetary speleological research. Improved cave detection on Earth will provide conservation biologists and resource managers with a tool to efficiently identify and prioritize caves for conservation and management [
1]. In North America, cave-roosting bats are in decline due to the westward advance of white-nose syndrome. This epizootic disease has resulted in the loss of millions of bats [
2] in 33 states and five Canadian provinces [
3,
4], and is affecting at least 11 cave-roosting hibernating bat species [
5]. At a global scale, we simply do not know where most cave-roosting bat species occur—further challenging effective conservation and management efforts.
Caves also represent important habitats for cave-restricted animals. These systems often support troglomorphic (subterranean-adapted) species with narrow geographic ranges (i.e., occurring within a single cave or watershed [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]) and are often represented by small populations [
16,
17]. Cave entrances have also been identified as important habitats for relict arthropod species from the last glaciation [
18,
19,
20,
21,
22] and extensive surface disturbance [
23,
24,
25]. While some areas have been identified as hotspots for endemism and diversity [
7,
26], cave communities in most regions globally remain largely unknown. The use of remote sensing techniques will improve our ability to reliably locate caves; these features can then be prioritized for biological inventories and subsequently managed in accordance with their conservation importance.
From a planetary perspective, detecting caves elsewhere in the solar system will factor prominently into how caves are targeted for future robotic exploration in the search for life [
27,
28,
29,
30,
31]. Advanced detection capabilities will also enable us to prioritize caves for human habitation on the Moon and Mars [
29,
32,
33,
34], and searching for evidence of life on Mars [
29,
34]. To date, over 1000 Martian [
35,
36] and more than 200 lunar cave-like features [
37,
38,
39,
40] have been confirmed. Additionally, vents and fissures associated with water ice plumes have been identified on several icy moons including Enceladus [
41,
42], Io [
43], Europa [
44], and Triton [
45]. In total, 2667 subterranean access points (SAP) have been identified across the solar system [
31,
46]. Additional SAPs and cave-bearing terrains on other planetary bodies including Mercury, Pluto, Titan, and several dwarf planets and comets will require further examination and scrutiny [
31,
46].
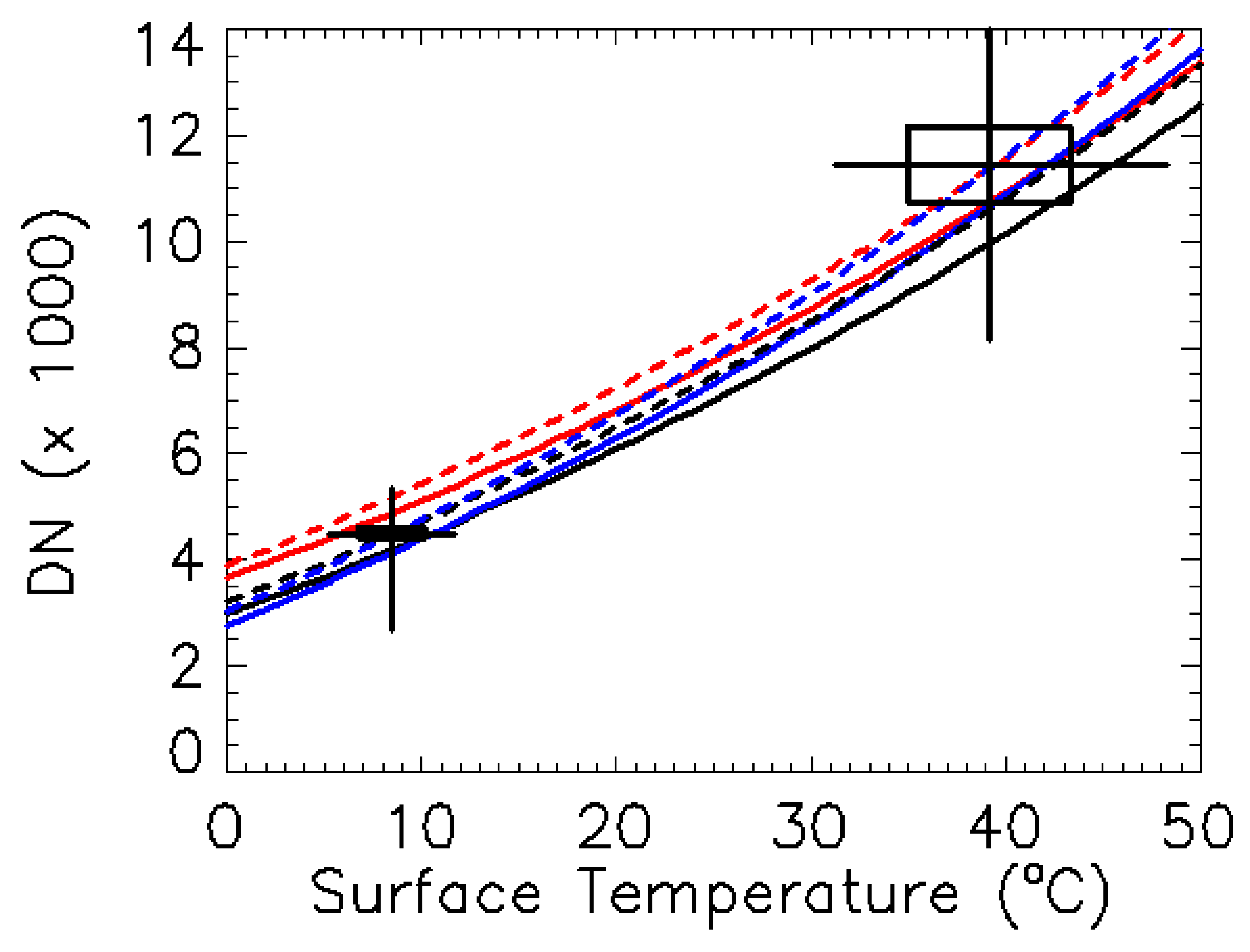
Cave entrances typically appear as warm features in thermal imagery acquired at night and cool features in midday imagery (e.g., [
1,
36,
47,
48]) because cave entrances are generally characterized by smaller diurnal temperature changes than the surrounding surface rock. Deep interior cave temperatures are typically stable (e.g., [
49,
50]) due to diurnal surface temperatures, which are dampened via thermal conduction of the geologic substrate [
51,
52]. As this occurs, the diurnal temperature variations of cave entrances may also be diminished. The resultant diurnal thermal profile may thus be similar to material with high thermal inertia (e.g., exposed bedrock; [
53]).
Thermal inertia, a measure of how much an object resists temperature changes and is inherent in all surfaces, is defined as
, where
k is thermal conductivity,
ρ is density, and
c is heat capacity (e.g., [
54,
55]). Rock surfaces often have higher thermal inertia and therefore exhibit smaller changes in temperature over a diurnal cycle, whereas dust is a common example of a low thermal inertia material.
Rinker [
56] was the first to attempt cave detection using thermal instrumentation. He found that caves would be detectable under certain conditions and cautioned that false positives would prove daunting when attempting to identify caves with thermal imagery. This hypothesis went untested for over 30 years. Over the last decade, researchers have re-examined cave detection in the thermal infrared and have made significant advances (e.g., [
1,
47,
57,
58,
59,
60]).
Contemporary work involved collecting and analyzing ground-based temperature measurements and thermal imagery [
1,
47,
57,
58,
59]. The leap in our ability to detect caves was largely attributed to higher instrument sensitivity, modern computing systems that make processor-intensive analytical techniques possible, and the availability of high accuracy and affordable ground-based meteorological instruments. Analyzing ground-based data from caves in the Atacama Desert of northern Chile, Wynne et al. [
1], estimated optimal detection times and demonstrated the utility of ground-based temperature measurements for identifying imagery acquisition times for aircraft-borne missions. Wynne et al. [
57] later improved our understanding of cave thermal behavior, proposing three endmembers of cave thermal behavior: Classic, pseudo-classic and ice cave.
Researchers conducted a series of experiments using several generations of QWIP (Quantum Well Infrared Photodetector) thermal instruments [
47,
61], finding a clear separation between cave, tunnel cave (i.e., a subterranean feature with entrances on either end, typically with frequent air flow), and random non-cave locations on the surface in thermal images captured at 10 min intervals over a 24 h period. Their results suggested how larger caves may be distinguishable from shallow alcoves and tunnel features. Using a similar dataset of thermal imagery, Titus et al. [
59] further examined multiple thermal images containing cave entrances over a 24 h period; they reported the detectability of caves was optimal when multiple thermal images were acquired at either the warmest (midday) or coolest times of day (predawn).
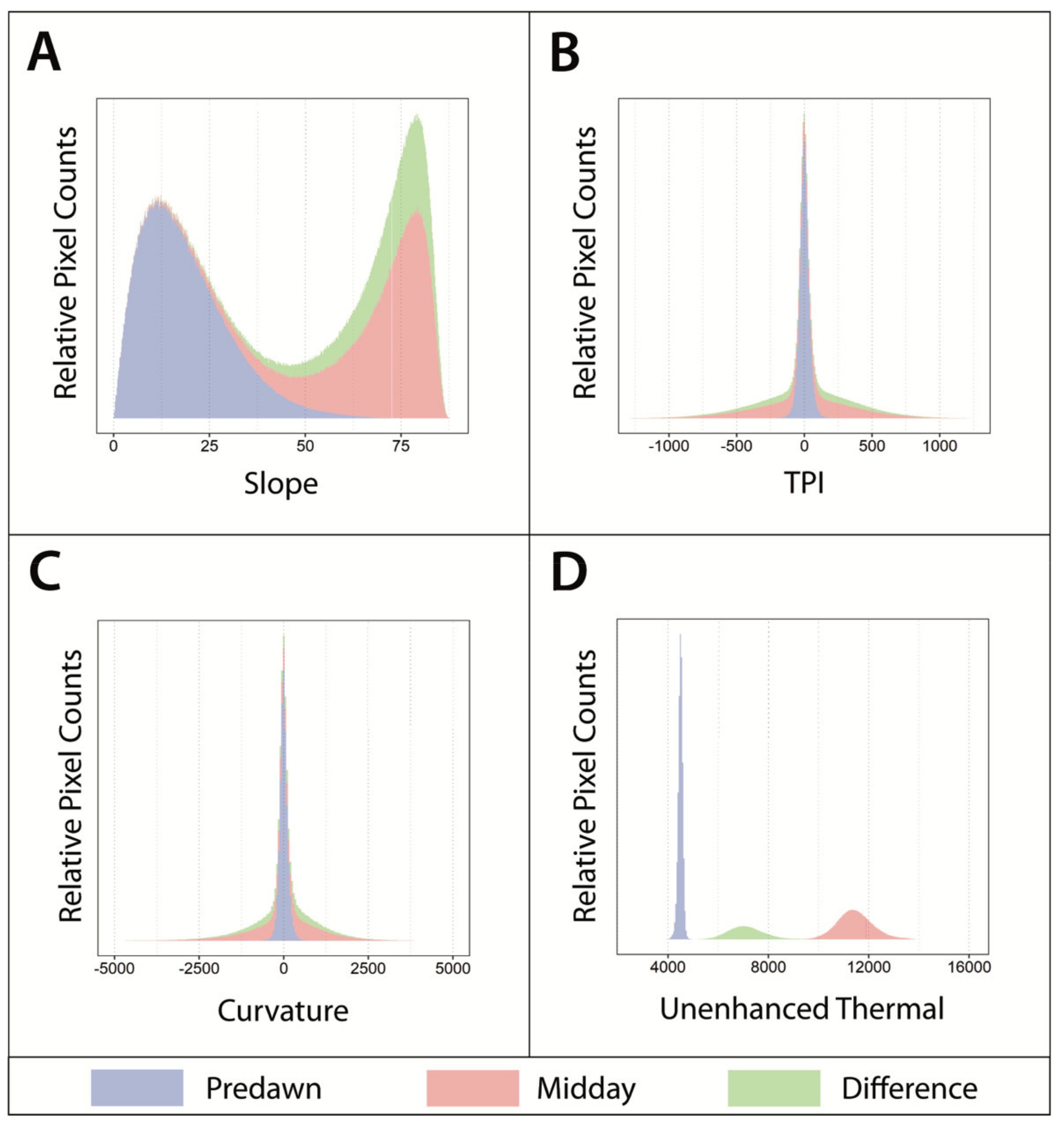
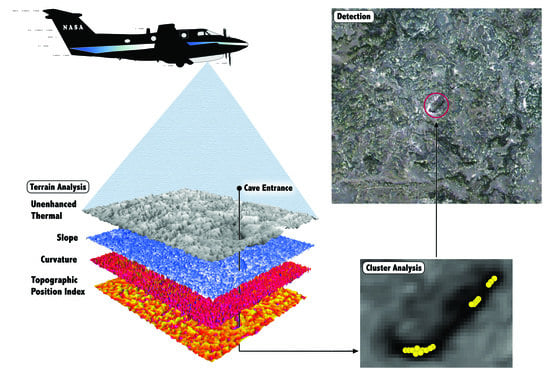
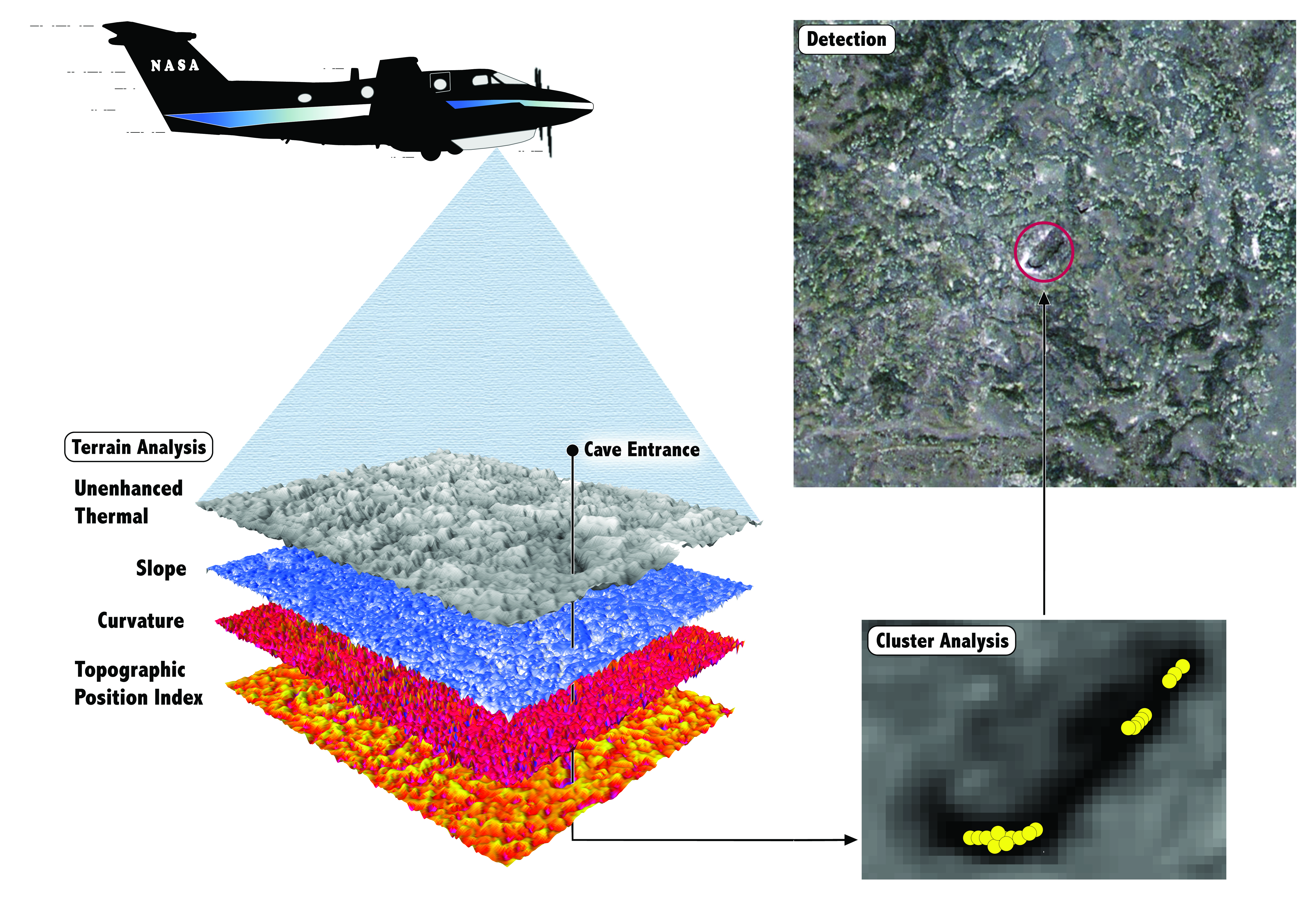
In this paper, we applied advanced image processing techniques to multiple time-of-day thermal imagery to reduce the frequency of false positives. Specifically, we: (1) Determined the efficacy of methods developed for investigating topographic surfaces for thermal imagery analysis; (2) evaluated the usefulness of predawn and midday imagery for detecting caves; and (3) ascertained whether thermal characteristics captured at one time of day (predawn or midday), or the difference in thermal value between those two times, was more informative than another. Specifically, we compared the thermal signatures of cave entrances to all non-cave surface locations using a multivariate framework involving terrain analysis methodology applied to the thermal surface (i.e., topographic position index, slope, and curvature of thermal values) and unenhanced thermal values derived from thermal imagery.
3. Results
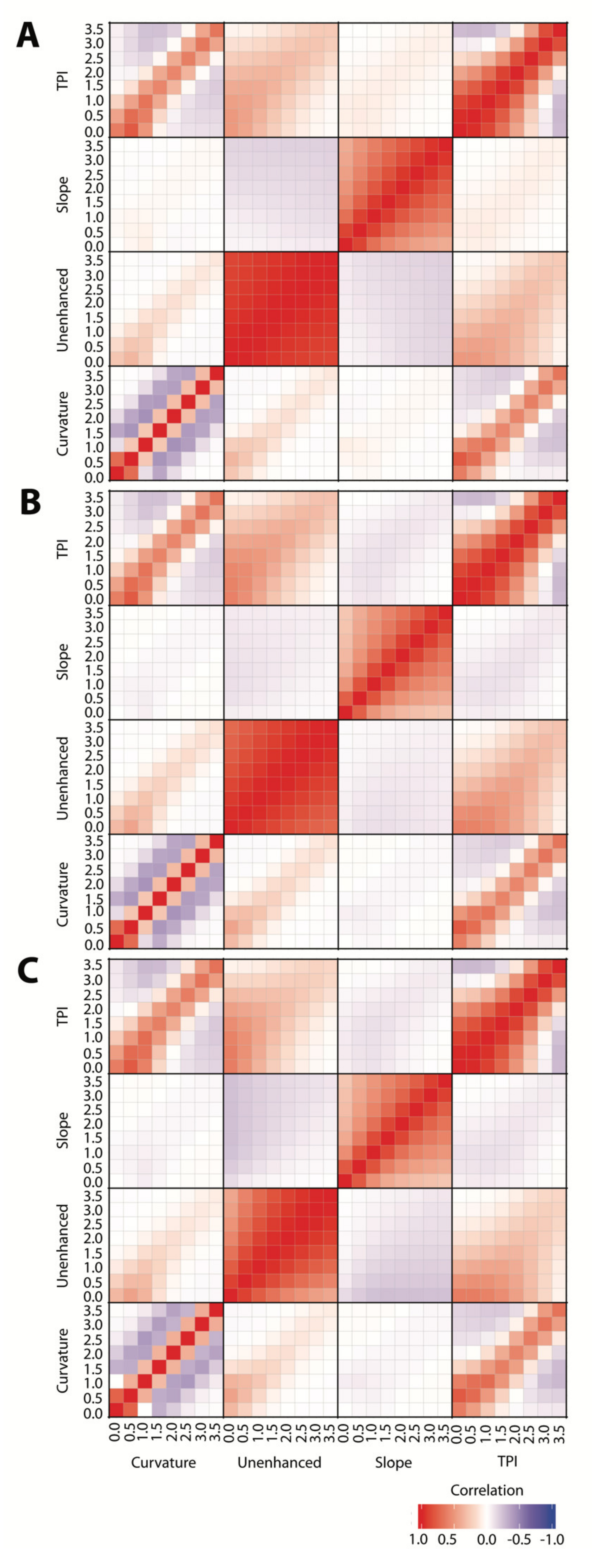
Pearson’s correlations revealed high correlations across most paired comparisons of covariates. Variables were correlated within and between different variables and distances from cave entrances (e.g., slope 1.0 m vs. 2.0 m, as well as slope 0 m vs. TPI 0 m;
Figure 5), as well as spatially (e.g., two surface locations within 3.5 m were highly spatially autocorrelated).
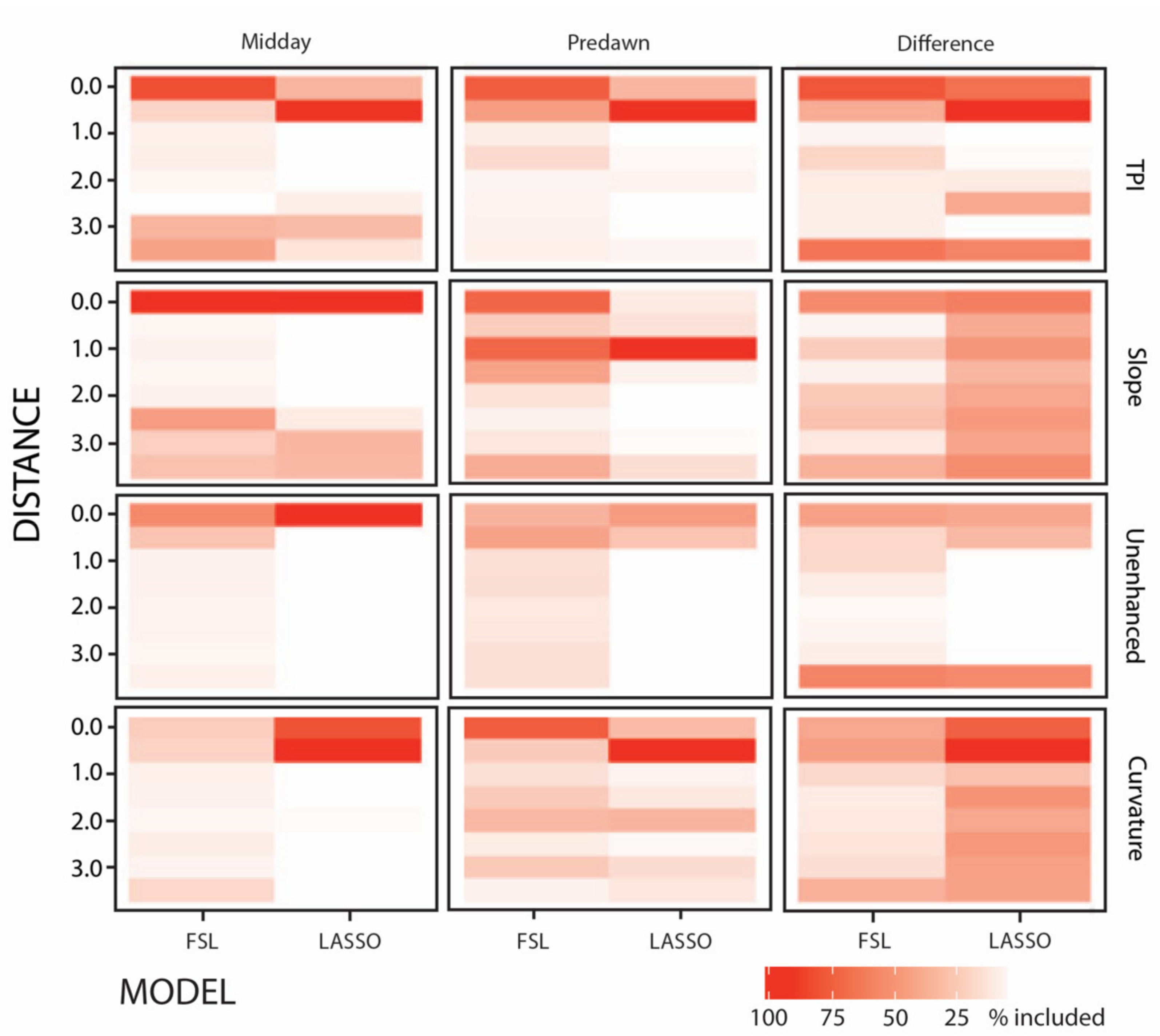
Given the large number of covariates used, and that developing a summary table of candidate models is both difficult to parse and interpret, we provide a graphical representation for discerning the most important covariates (
Figure 6,
Table 1). Overall, model selection procedures for both regression analyses produced a similar set of covariates. For predawn and midday imagery, covariates representing pixels at or near (0.5 m) each cave entrance were most useful for cave identification/prediction. Interestingly, LASSO often selected covariates describing conditions 0.5 m from the cave entrance, while FSL typically selected covariates describing conditions centered directly over the cave entrance (i.e., at 0 m). Analyses performed on the difference imagery covariates did not present a clear pattern for model selection. Our FSL models generated simpler, and thus more interpretable models, than LASSO. Subsequently, we developed a final predictive model based on the FSL results and included covariates that were selected in more than 50% of our simulations.
The following covariates were selected per imagery type:
Predawn—slope, TPI, curvature at 0 m from cave entrance, as well as slope at 1 m from cave entrance;
midday—slope, TPI, unenhanced thermal at 0 m from cave entrance; and
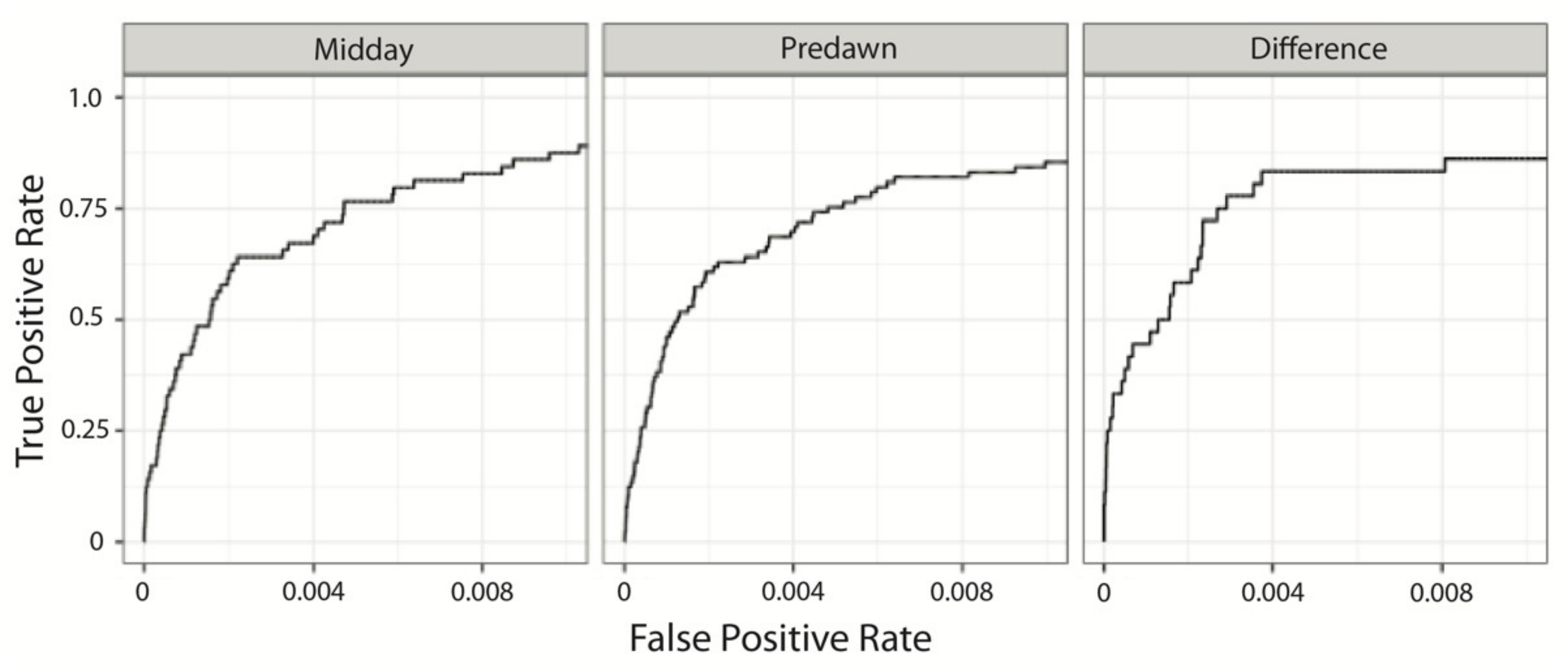
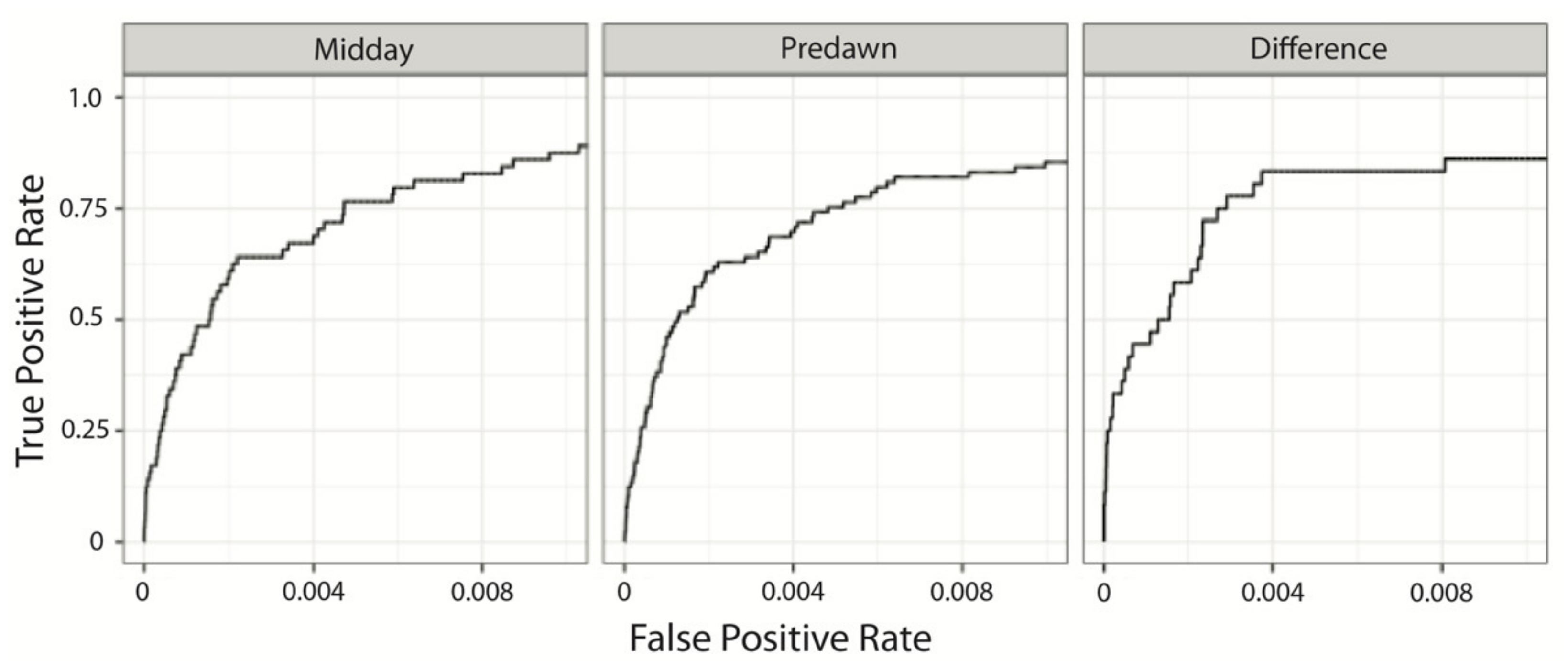
difference—TPI and slope at 0 m from cave entrance, as well as unenhanced thermal and TPI at 3.5 m from cave entrance. ROC curves for our final model had area under curve (AUC) values with 95% confidence intervals centered near 99% (predawn: (0.974, 0.998); midday: (0.994, 0.998); difference: (0.994, 0.999)). To examine the sensitivity of the variables included in our models, we varied the inclusion threshold between 30% and 70% and observed no practical difference in AUC values (
Figure 7).
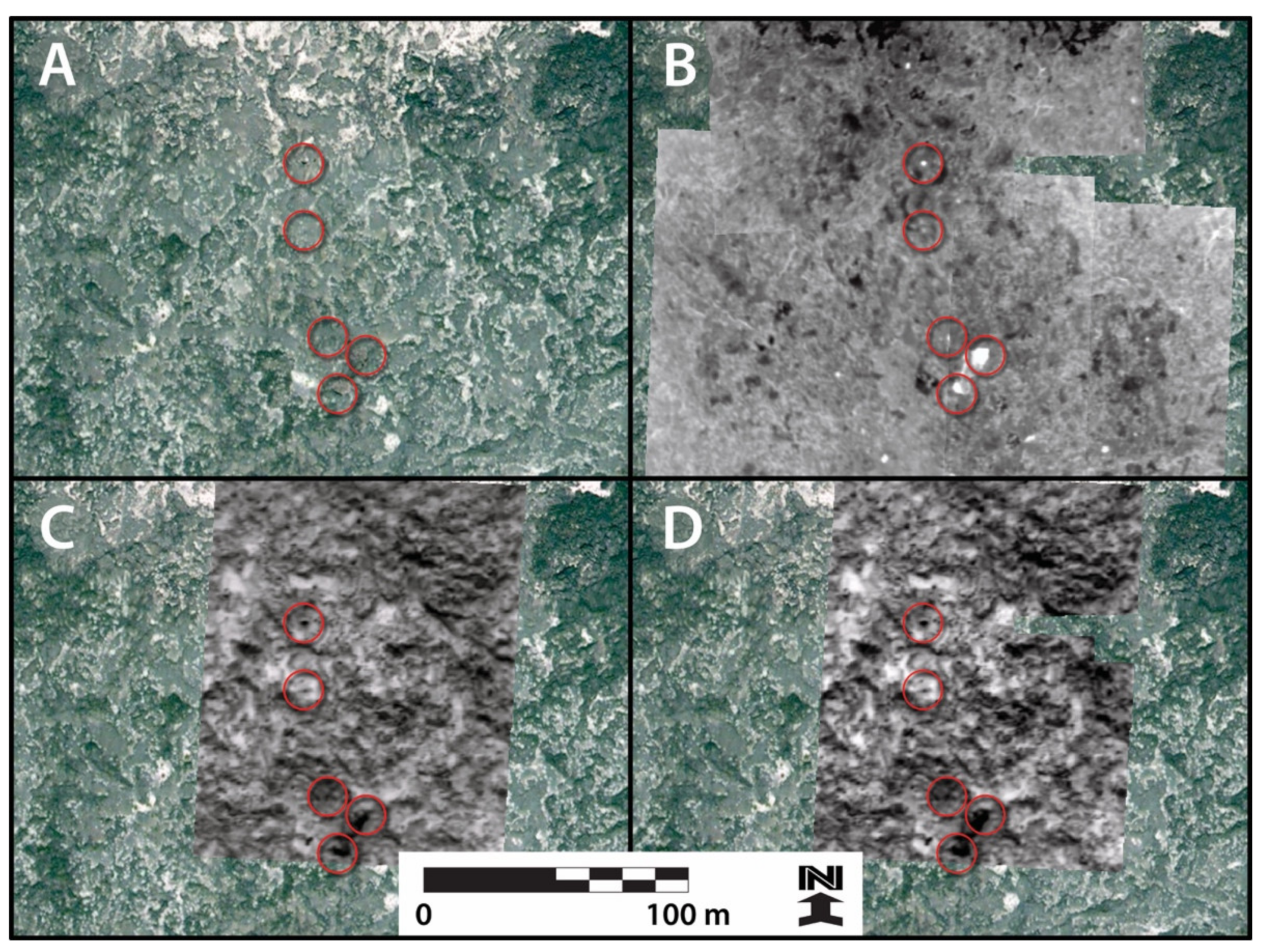
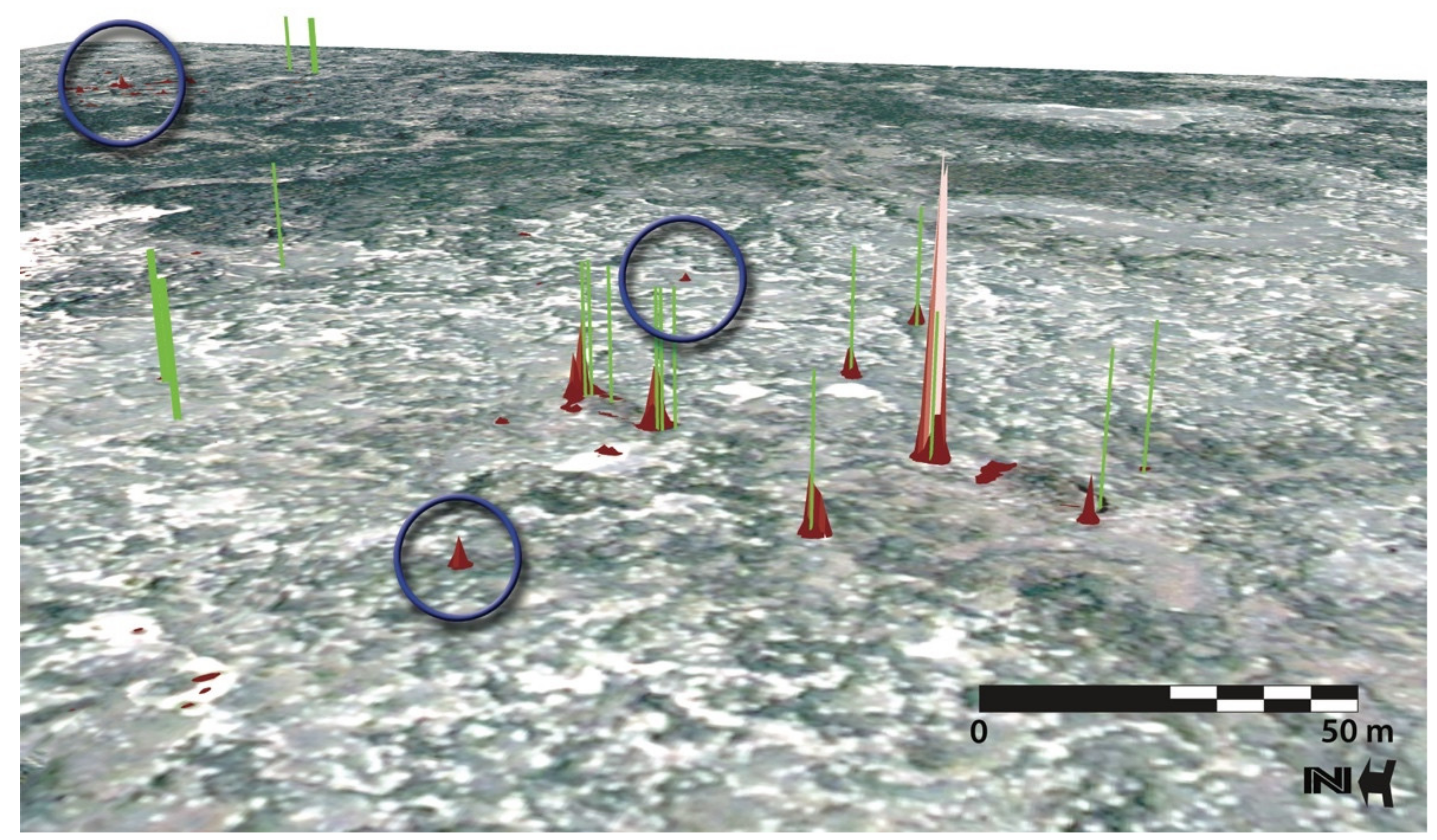
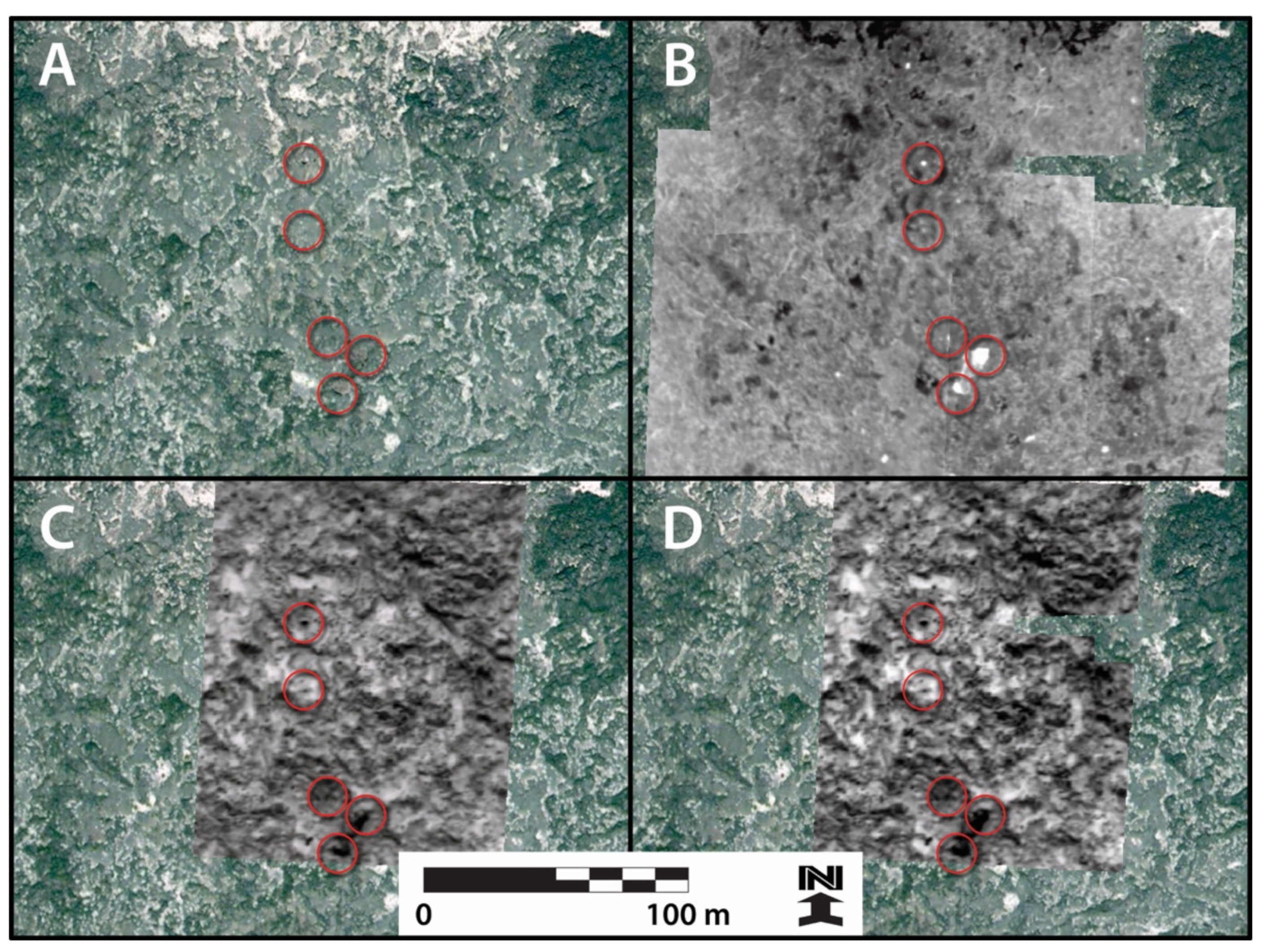
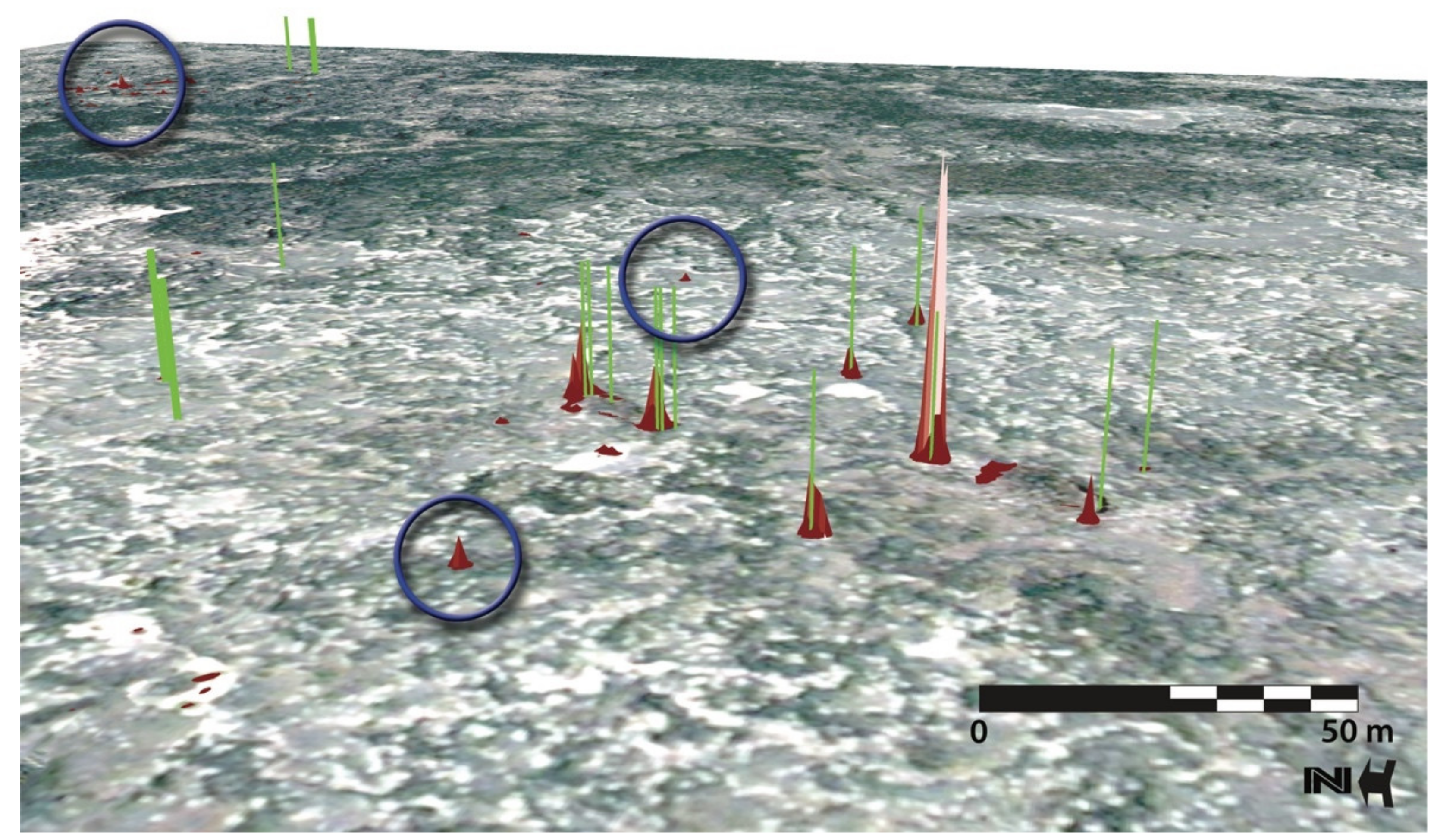
Our cluster analysis revealed that predawn and difference imagery resulted in the highest proportions of pixels representing known caves (both at 79%), while 55% of the pixels within the midday imagery represented known caves (
Table 2). The total number of pixel clusters representing known caves were 47, 43, and 17 for predawn, midday, and difference imagery, respectively. Additionally, we identified 26, 29, and 8 clusters as either false positives or potential new cave entrances for the predawn, midday, and difference imagery, respectively. Examples of both known cave entrances and features with cave-like thermal behavior are provided in
Figure 8.
4. Discussion
Through this work, we have demonstrated that applying techniques adapted from terrain analysis to thermal imagery holds significant promise for detecting caves. Across the three imagery types, combinations of slope, TPI, and curvature at 0 m from the cave entrance (i.e., the pixel at the approximate center of the cave’s entrance) were the variables included in the most parsimonious regression models. This suggests the use of terrain analysis algorithms is a robust tool to enhance detection capabilities with thermal imagery.
Overall, the models generated for predawn, midday, and difference performed similarly. We observed no quantitative differences in cave detection rates. ROC area under curves were 0.998, 0.997, and 0.996 for predawn, midday, and difference imagery datasets, respectively (refer to
Figure 7). We also achieved an acceptable false positive rate (percent of non-cave pixels incorrectly identified as a cave) of approximately 0.02% when the true positive rate (percent of cave entrance pixels correctly identified as a cave) was between 20 and 50%. In other words, a 0.02% false positive rate implies that when examining a given region of one million pixels, we would have approximately 200 false positives while correctly identifying between 20 and 50% of the actual caves present.
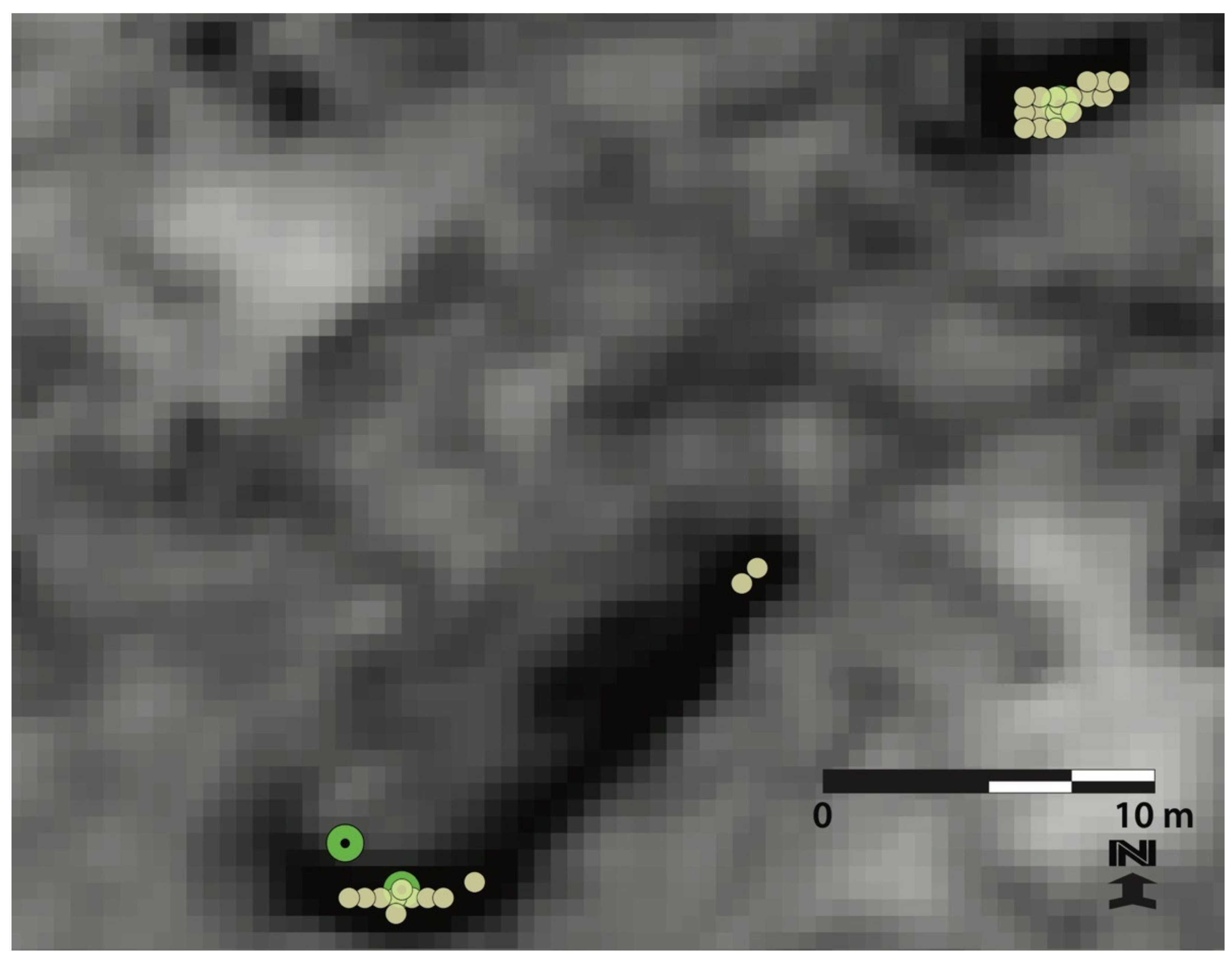
We observed a high degree of pixel aggregation centered on and around known cave locations. This phenomenon is influenced by imagery resolution, which affected the shape of the ROC curves. From our analysis,
Figure 9 is an example of pixel aggregation where two of three clusters represented known caves. Given that our thermal imagery resolution was 0.5 m, and most cave entrances were meters in diameter (and thus represent multiple pixels), cluster analysis is a necessary step in imagery interpretation. Thus, identifying clusters of a small number of the highest-scoring pixels (i.e., those with the highest
values) and then subsequently examining the visible imagery would be a good strategy for identifying potential false positives or small cave entrances or skylights. For terrestrial applications, a small number of aggregated pixels may represent a cave with a small entrance. This feature would likely become a high priority target for groundtruthing. For Mars, a small number of aggregated pixels representing a potential cave may be a low priority target for further examination as a human shelter or storage depot, but potentially a higher priority target for robotic exploration—as it may be more buffered from the surface environment (e.g., [
96,
97]). Thus, the grouping of pixels with cave-like thermal signatures into clusters will enable workers to prioritize which potential cave localities require further examination (i.e., physical groundtruthing of terrestrial caves or additional imagery interpretation for planetary caves).
As the difference imagery data layer performed similarly to predawn and midday imagery for the regression analysis, inclusion of this imagery type as part of the analytical framework may be considered unnecessary. However, analysis of the top-scoring 0.01% of the difference imagery identified the same high proportion of known caves as the predawn imagery (79%), although the lower max values suggest that the difference imagery in general performed poorly in capturing unique cave signatures.
However, we are hesitant to discount the utility of the difference imagery. Logically, this combined data layer had great potential. Its relatively unimpressive performance may have been due to smaller sample sizes (37 caves in the difference imagery compared to 64 and 89 caves in the midday and predawn imagery, respectively), and smaller analysis area (the overlap of midday and predawn imagery was 46% of the midday imagery and 36% of the predawn imagery). Furthermore, the warping and geometric transformations techniques employed to georeference the original images to the landscape almost certainly had some error. This error would have been compounded when we mosaicked multiple images into single midday and predawn images, and then the final difference image layer would have represented these compounded spatial errors. Subsequently, we suggest this introduced additionally noise into the analysis. With more accurately georeferenced images, we suspect the difference analysis would have performed much more favorably.
Our models show several distinct locations that exhibit thermal characteristics comparable to known cave entrances (
Figure 8). The red peaks rising above the landscape correspond with cave-like thermal signatures. There are several other examples across the landscape with similar cave-like behavior but are not near any known caves; these features are either false positives, fissures, permanently shaded features, or undiscovered cave locations. These areas should ultimately be groundtruthed. A corresponding benefit of isolating the higher-probability sites is our ability to exclude large portions of the landscape as unlikely to be caves. Thus, we would be able to focus our examination of potential features of interest more efficiently.
Interestingly, a few known cave locations do not correspond with peaks on the probability surface, which raises the possibility that these caves may have some morphological or geometrical difference that changes their thermal signature. These features may be shallow caves with different thermal characteristics than actual cave entrances—the latter guided the development of our models. Alternatively, these thermally atypical features may occur in areas with different geologic material (i.e., loosely consolidated rock or soil), which is differentially influencing the thermal behavior within the immediate vicinity of the cave entrance. Further examination will be required to understand what sets them apart, as well as possibly developing models to capture their unique thermal signatures. These possibilities underscore the need to further examine these thermal signatures to potentially develop a method for organizing these features into categories. Once done, a groundtruthing effort may be undertaken, so that data may be collected to develop and test models that describe their thermal signatures.
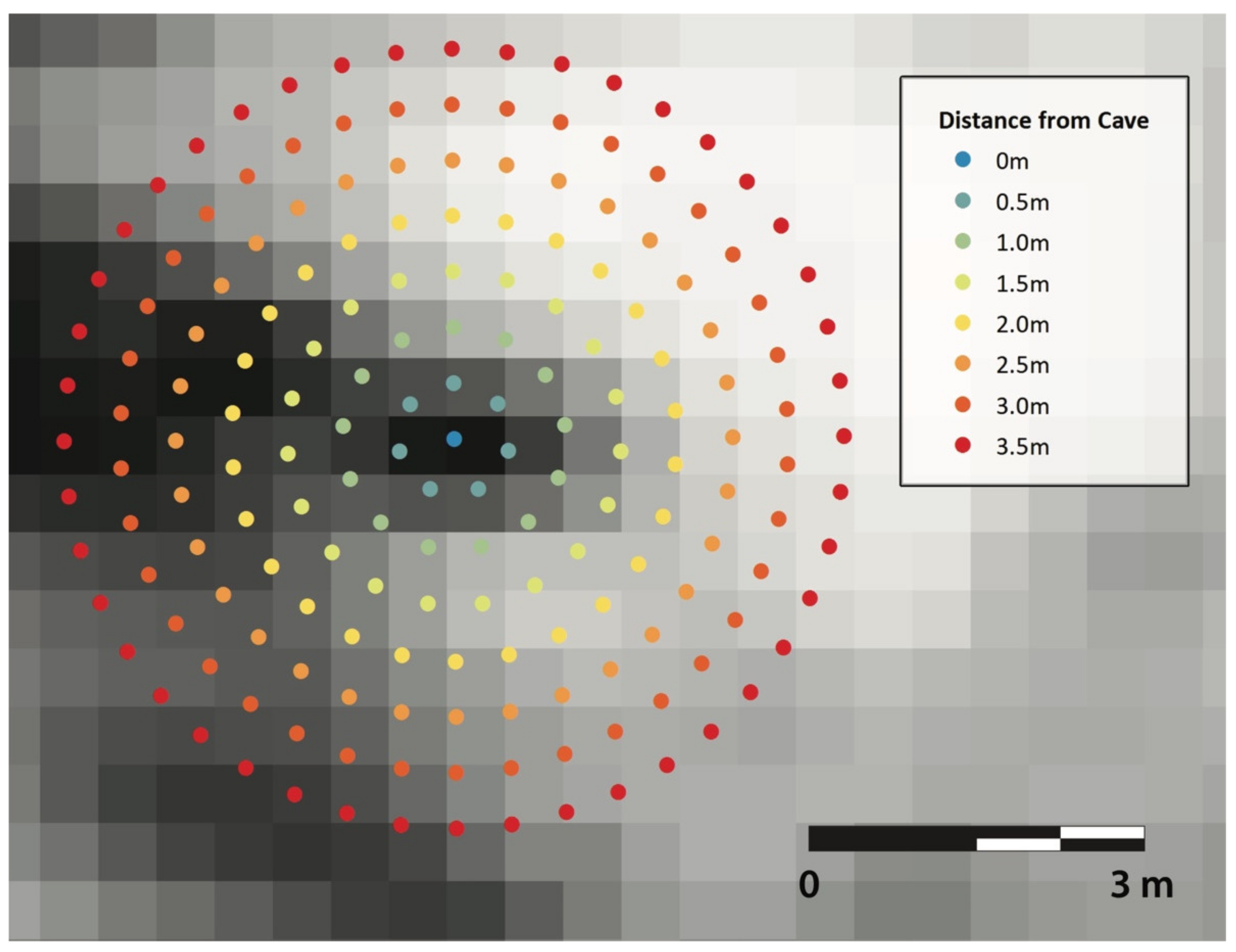
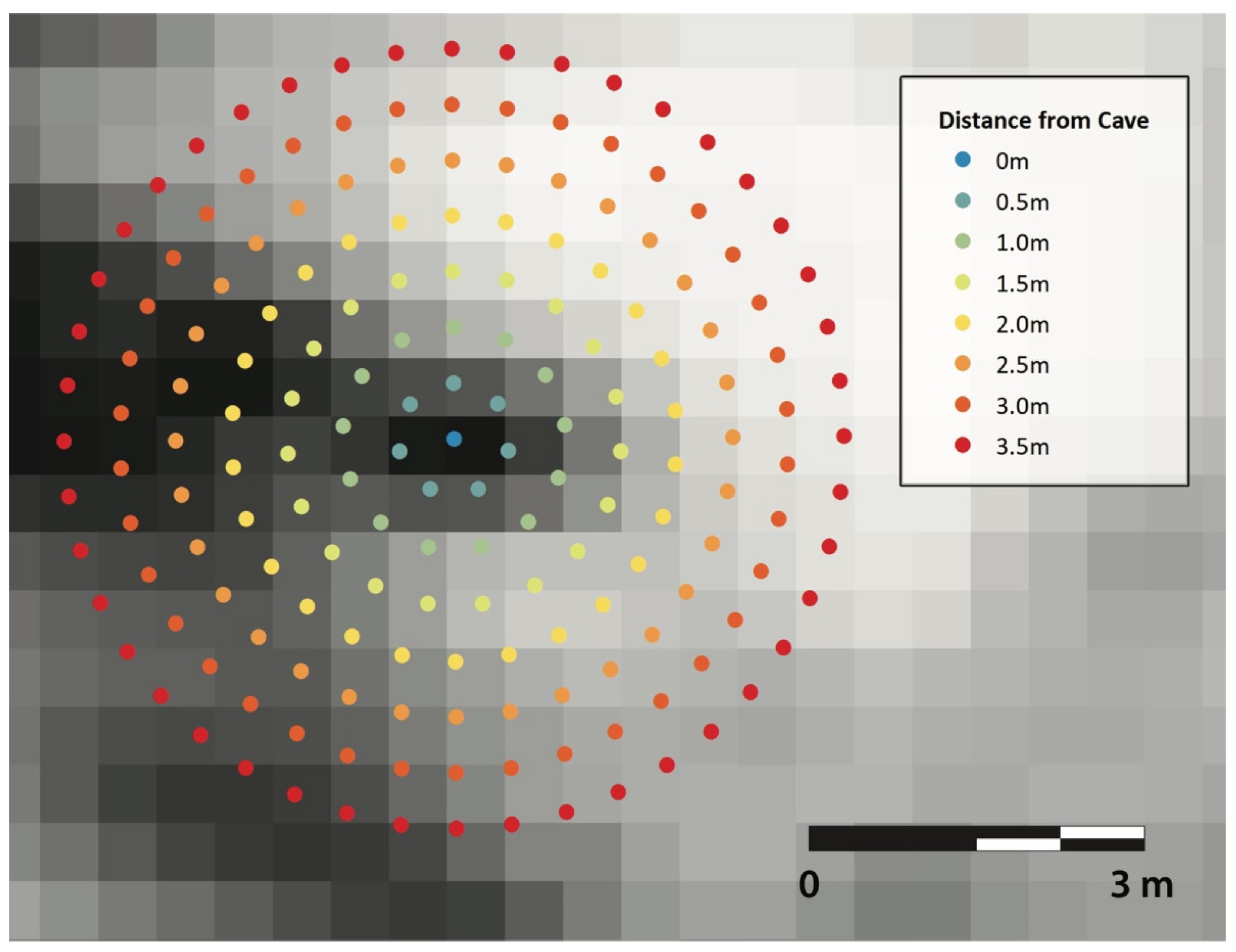
Because cave entrances are rarely perfectly circular, entrance configurations (often oval, oblong, crescent shaped or elongated cracks) may have skewed our values for most cave entrances. While our radial sampling method from the cave entrance (
Figure 4) was both statistically and methodologically defensible and successful overall, in some cases we may have included pixels which are neither part of the cave entrance nor represent an area influenced by the cave entrance when we averaged values for a given feature. Selecting points in a radius from entrance may be extracting DN values in locations where surface temperatures are disproportionally influencing pixel values, which may have resulted in subpixel mixing [
98]. It is also possible that we are extracting pixel values from surface locations where the thermal effects of the cave entrance were not influencing surface temperature. If this occurred, this would have skewed the average values for a given cave entrance. While the reality of imperfectly shaped cave entrances may have affected our results, we still differentiated known cave entrances from surface pixels regardless of cave entrance shape. However, a further refinement would be to visually examine each entrance (or suspected entrance) and then manually modify the pixel value extraction configuration to best fit the shape of the entrance of known or suspected cave entrances.
Generally, there are landscape conditions where caves may be either undetectable and/or the false positive rate may be high. Cave entrances occurring on north-facing slopes may be indistinguishable and lost due to topographic shadowing—as the DN values between these two features may be similar. Detection is also constrained by pixel resolution, such that cave entrances smaller than the pixel resolution may not be resolvable. Relying on one imagery type (e.g., predawn) could also increase the false positive rate as higher thermal inertia features, such as rock or bedrock outcrops, may be confused with cave entrances. Thus, acquiring imagery at two or more times over the 24-h cycle will be required to optimally improve detection capabilities under these conditions. Furthermore, poorly georeferenced thermal imagery may cause the cave locations to be shifted, or in particularly bad cases, may cause the predictive model to be based on skewed or warped data.
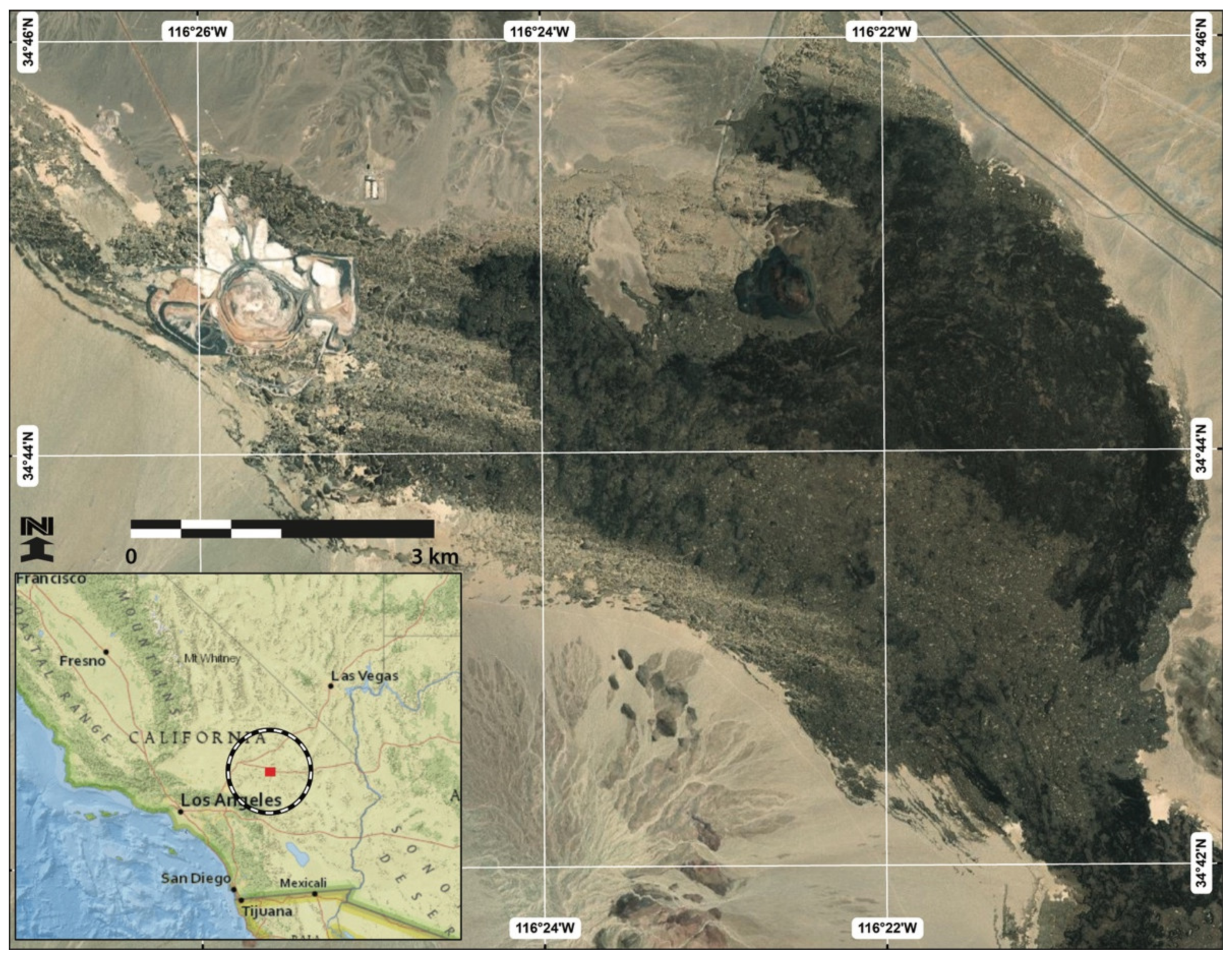
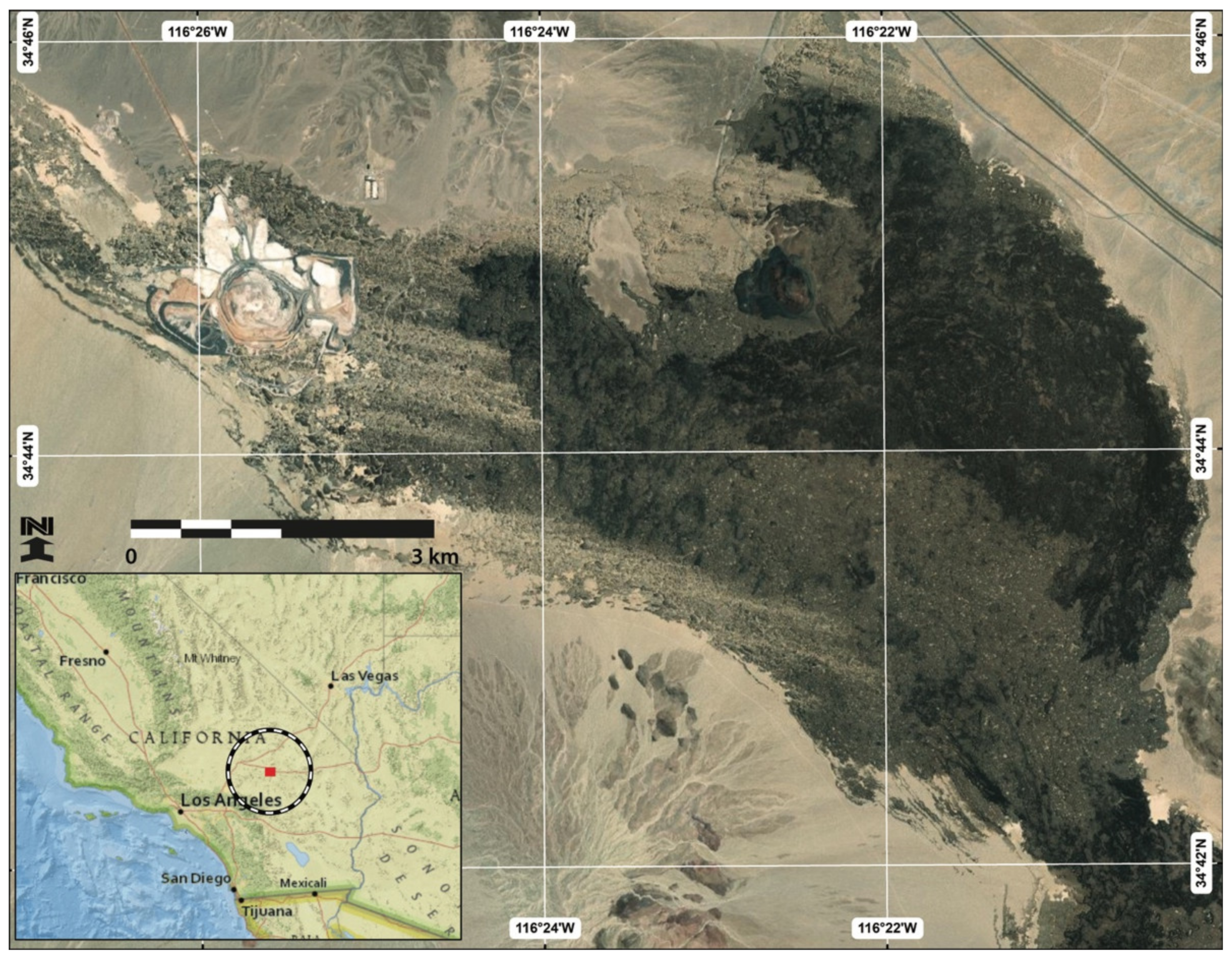
Overall, the identification and classification of non-cave landscape features that may be confused with cave entrances will be an important step towards further reducing the false positive rate. This becomes particularly relevant when examining possible cave features using only spacecraft-borne imagery of planetary bodies where a boots-on-the-ground groundtruthing effort is currently not possible. In the Pisgah dataset, we observed linear features (likely fissures), large collapse trenches, and areas of topographic shadowing. These features should be thoroughly examined. To further the science from both a terrestrial and planetary perspective, we could use this dataset as a feature class library. A first step would be to perform a supervised or unsupervised classification [
99], or an object-based classification method to capture odd shapes on the landscape (e.g., [
100,
101,
102]) within the thermal imagery. This would result in the development of feature categories, which then could be grouped based upon their likeness to one another; however, it is uncertain how these methods would perform in classifying the local thermal “shape” of the cave neighborhood. These procedures may require an intermediate step of describing shape metrics in a standard raster format before applying the classification methods. Thereafter, a field effort could be conducted to characterize and potentially reorganize these identified features into more specific categories. Once done, visible spectrum and thermal images of these features could be entered into a feature class library. These features could then be compared to similar features in both terrestrial and planetary imagery datasets. As this work progresses and more non-cave features with similar cave thermal signatures are identified, these data would be added to the feature class library.
Through applying the recommended methodological and field improvements elucidated above, this will enable us to further examine and hopefully quantify differences between deep and shallow caves, as well as identify and quantify those surface features, which may be confused with cave entrances. Through such an effort, we will further improve our ability to detect terrestrial and planetary caves—with the long-term goals of furthering cave conservation and management on Earth and identifying the best candidate cave sites for robotic exploration and human habitation on the moon, Mars and beyond.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}