
Motion Phase Compensation Methods for Azimuth Ambiguity Suppression in HRWS SAR


 ,
,
Abstract
:
1. Introduction
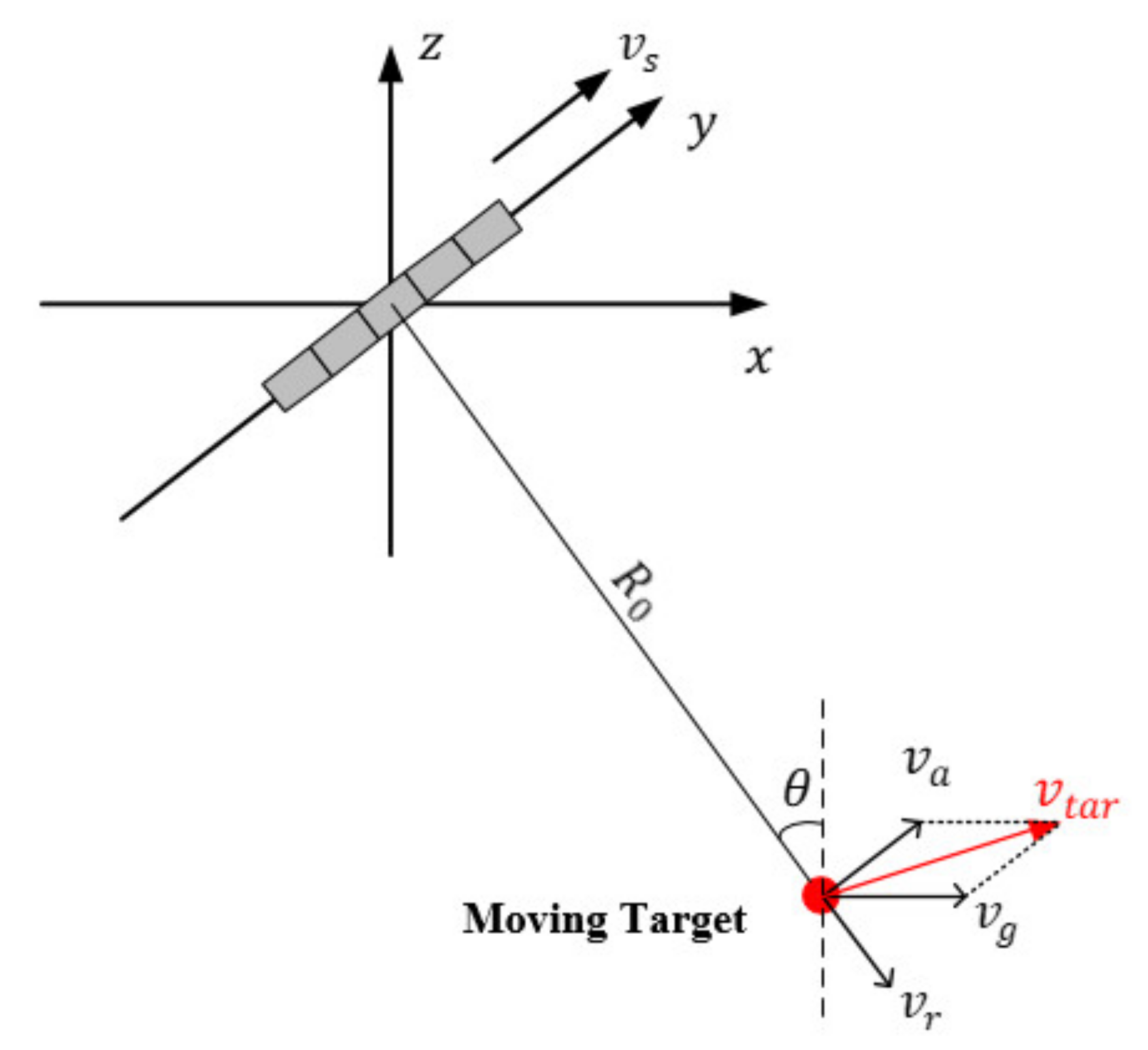
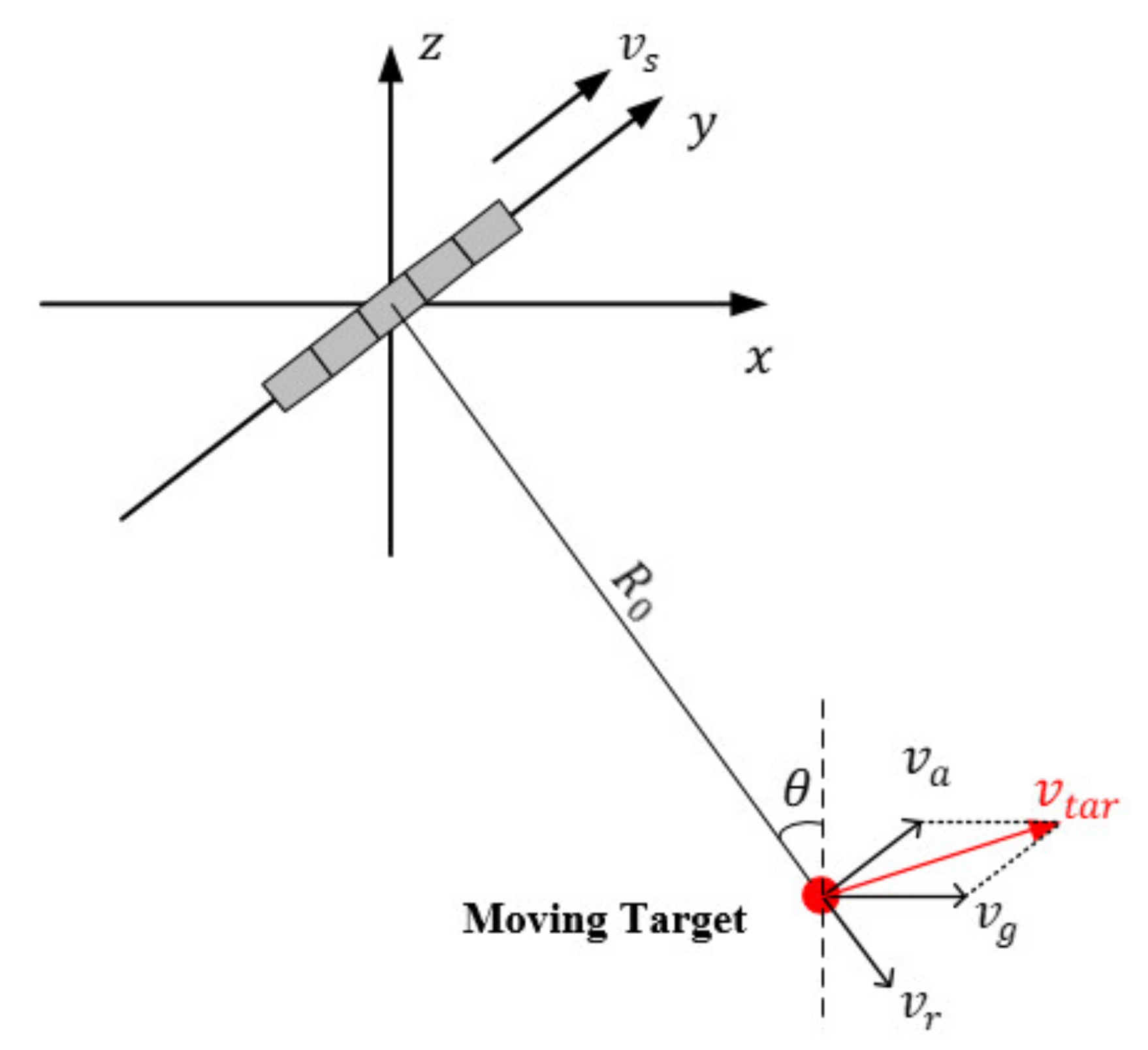
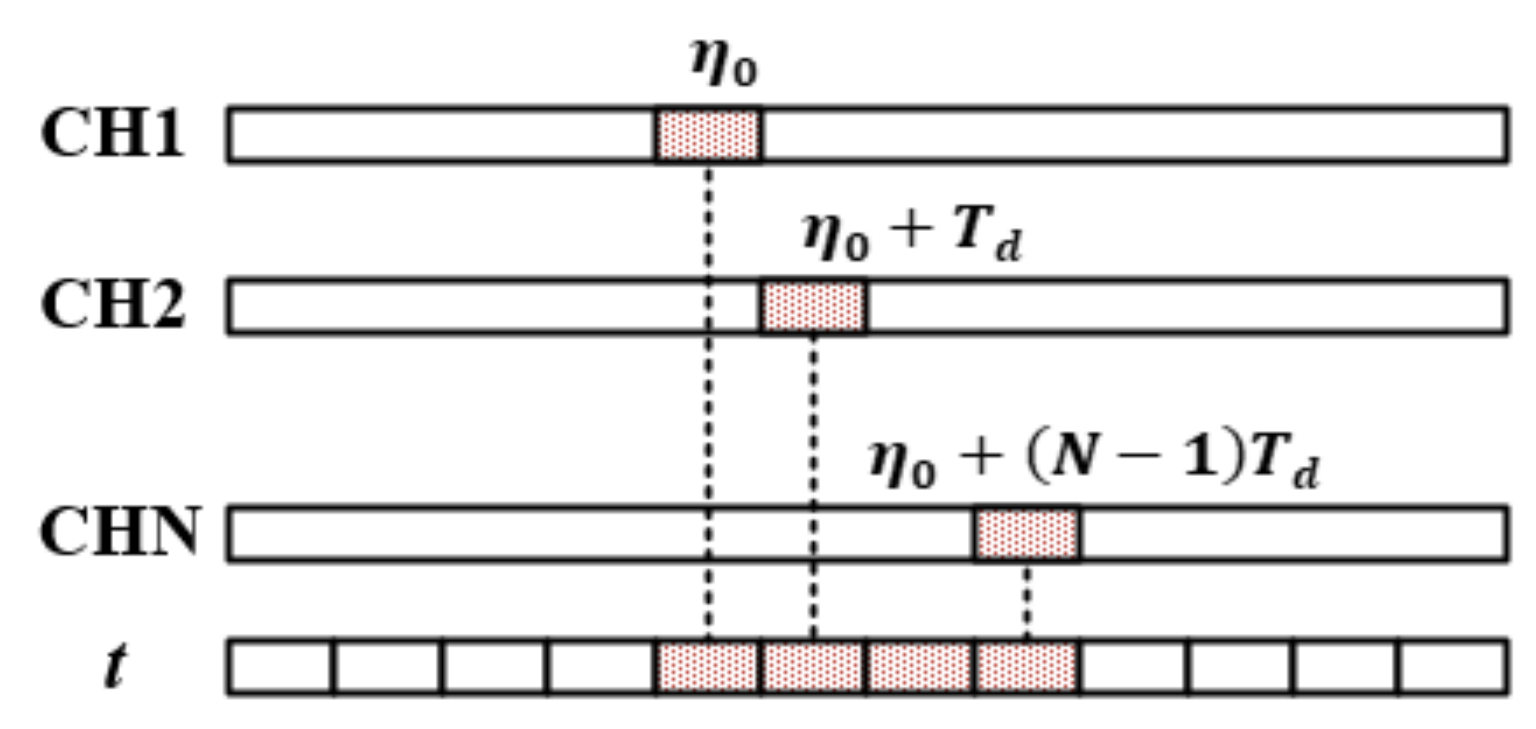
2. Signal Model
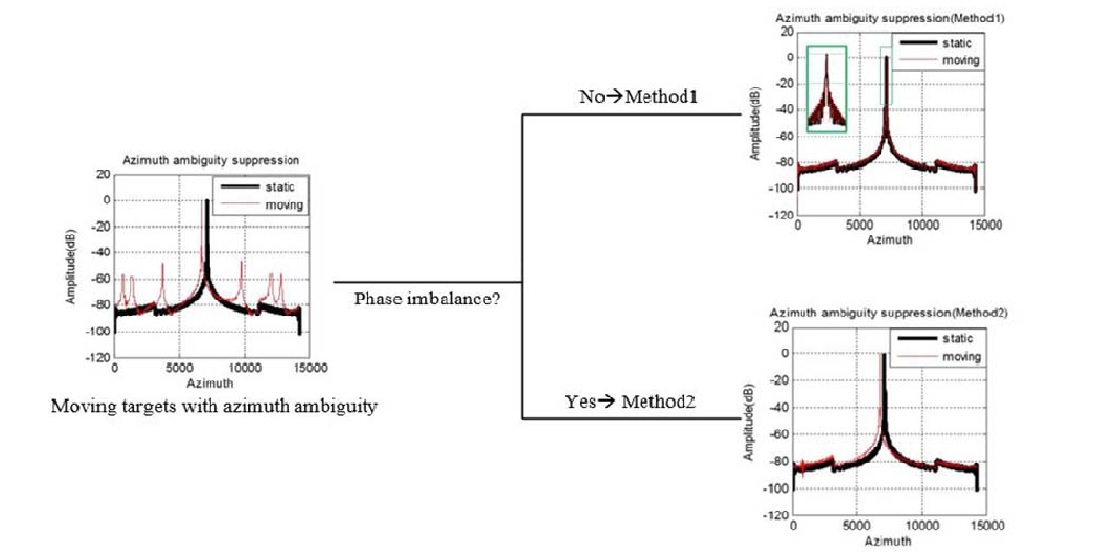
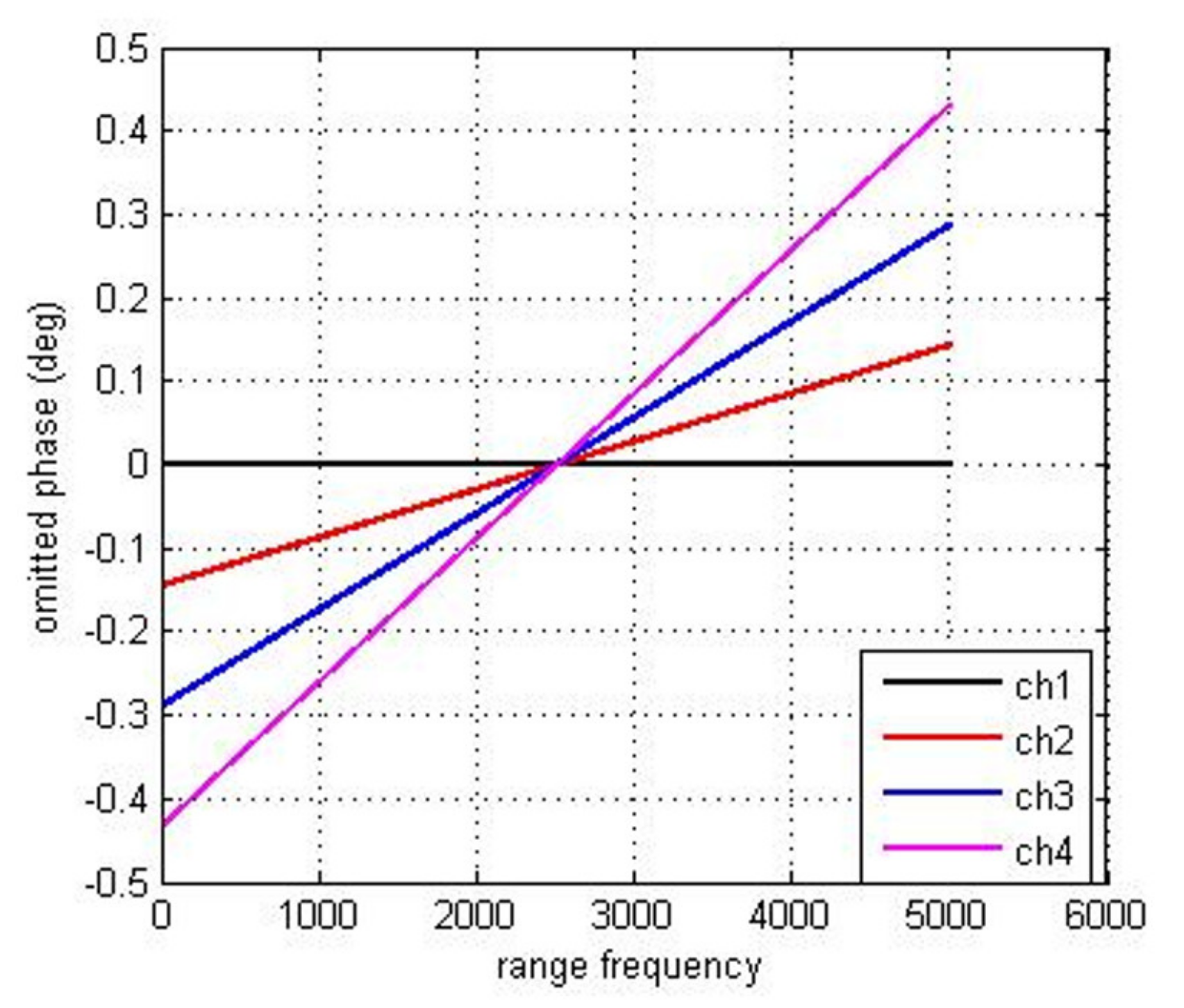
3. Methods
3.1. Method 1
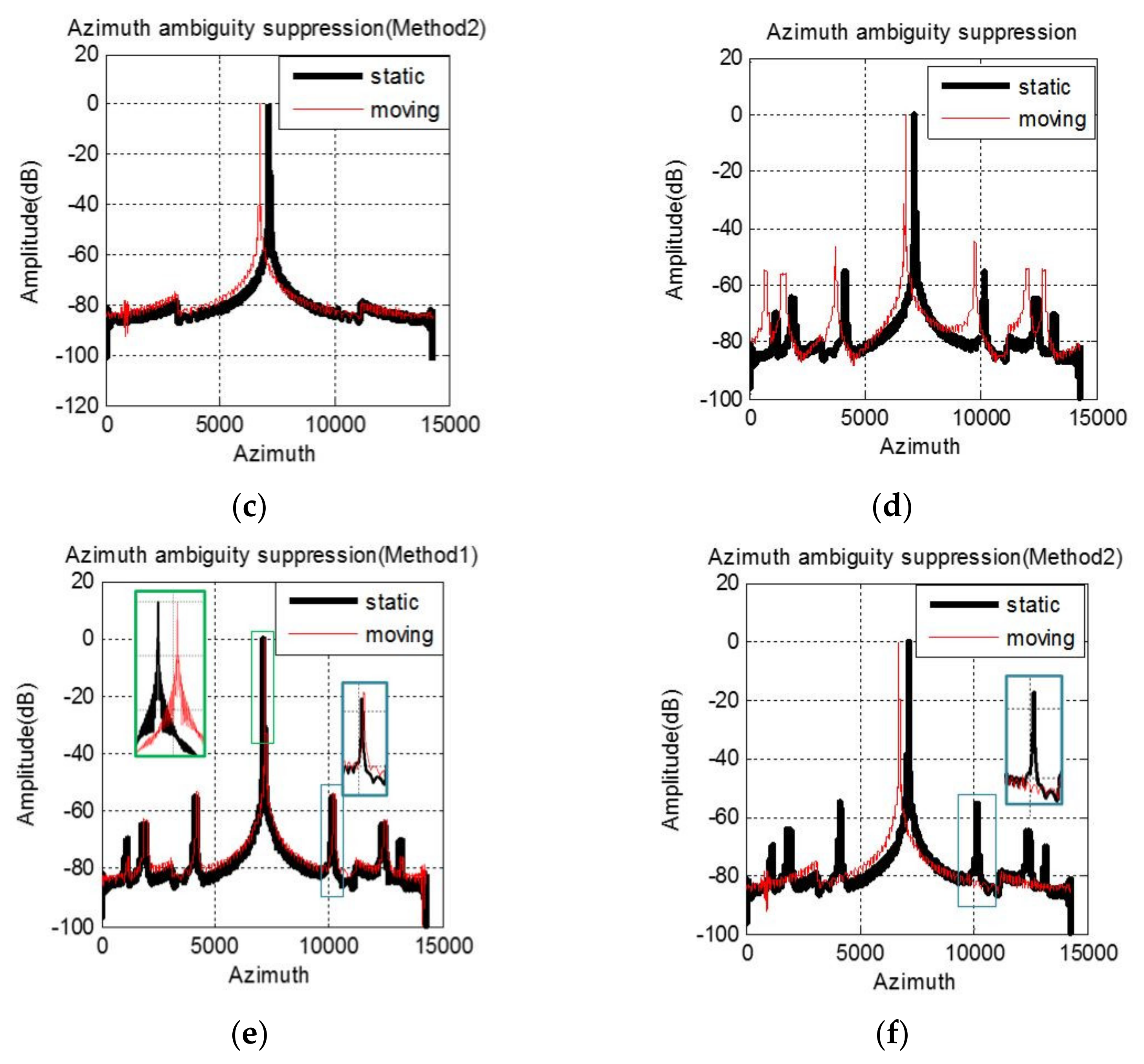
3.2. Method 2
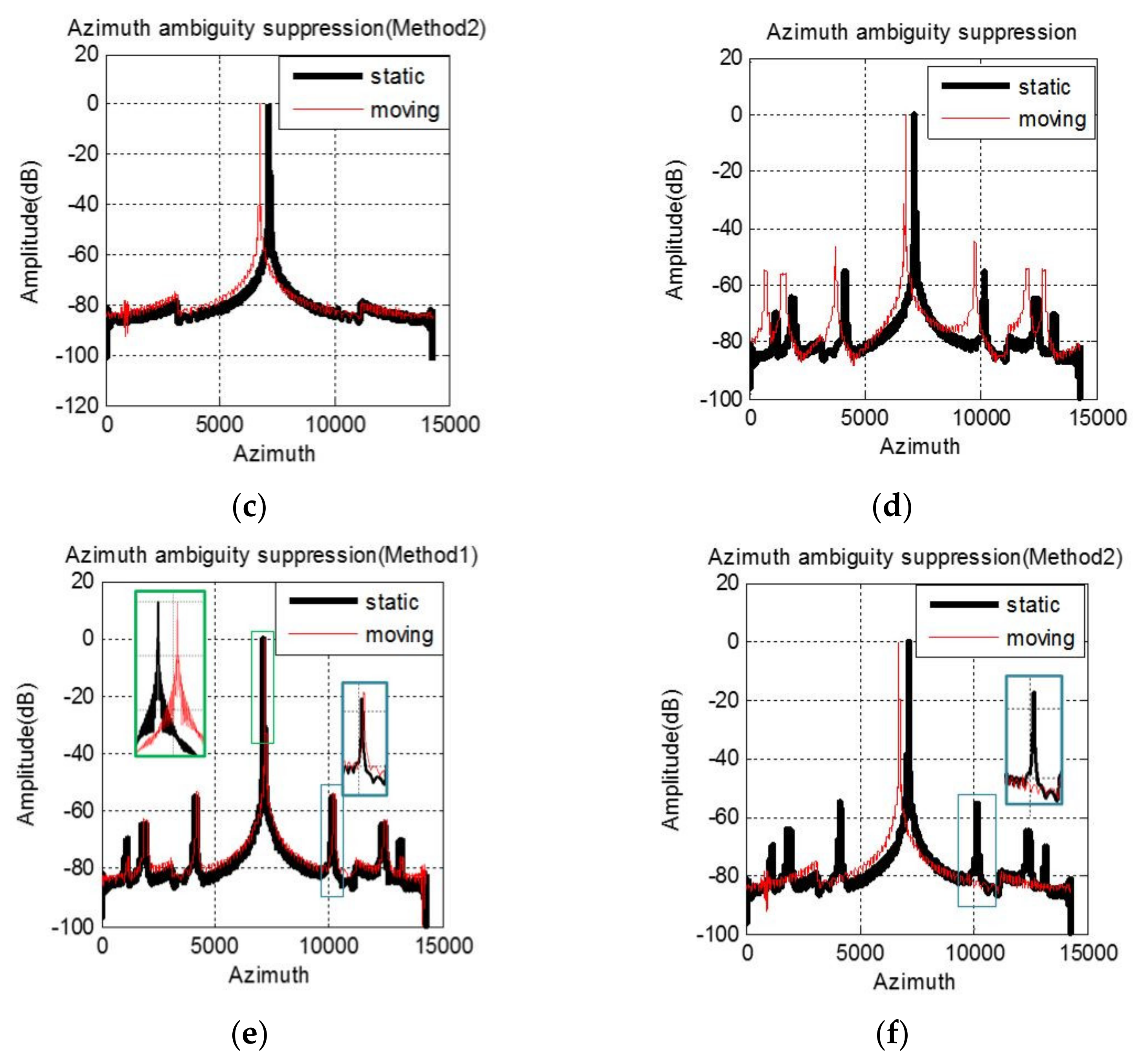
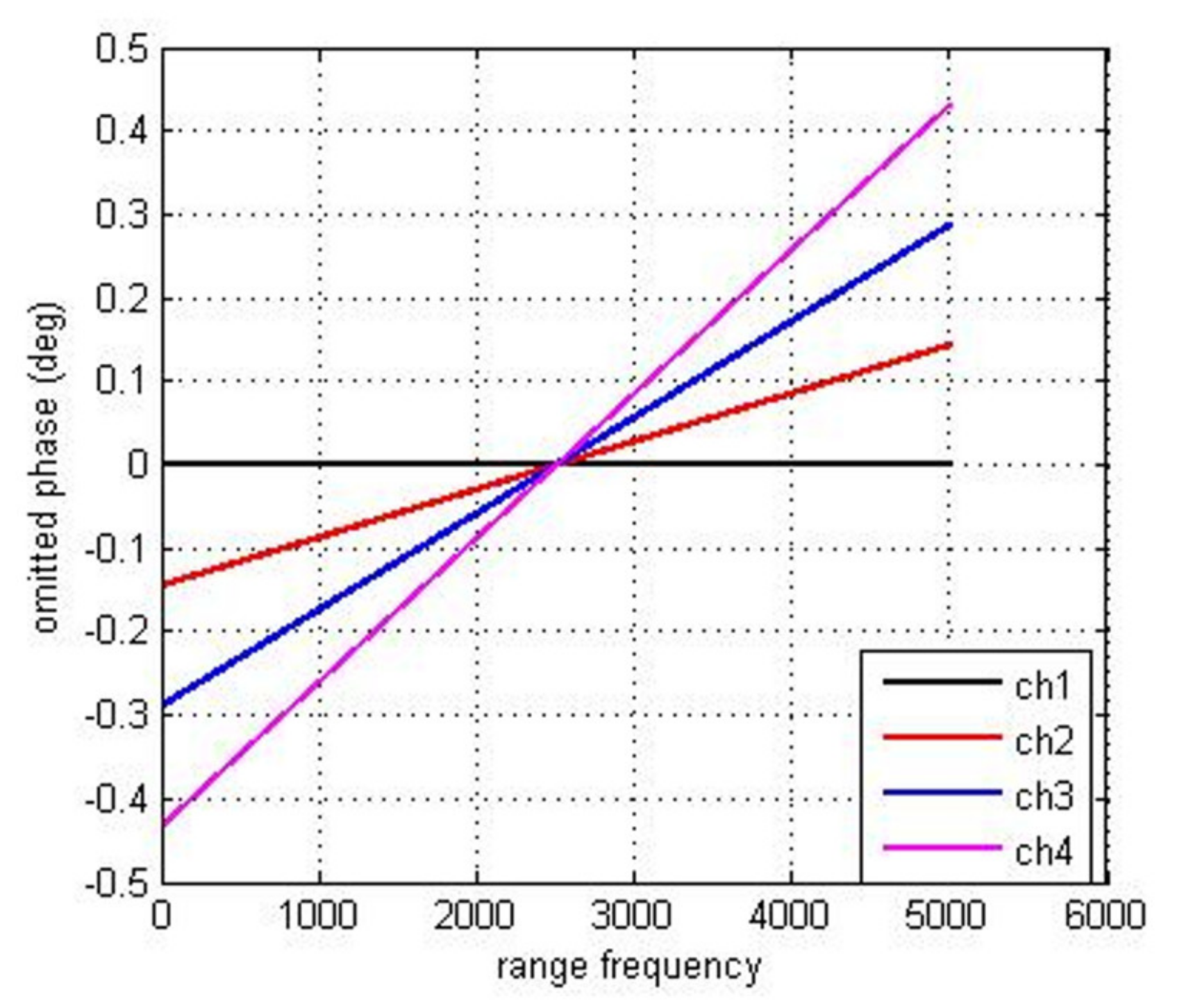
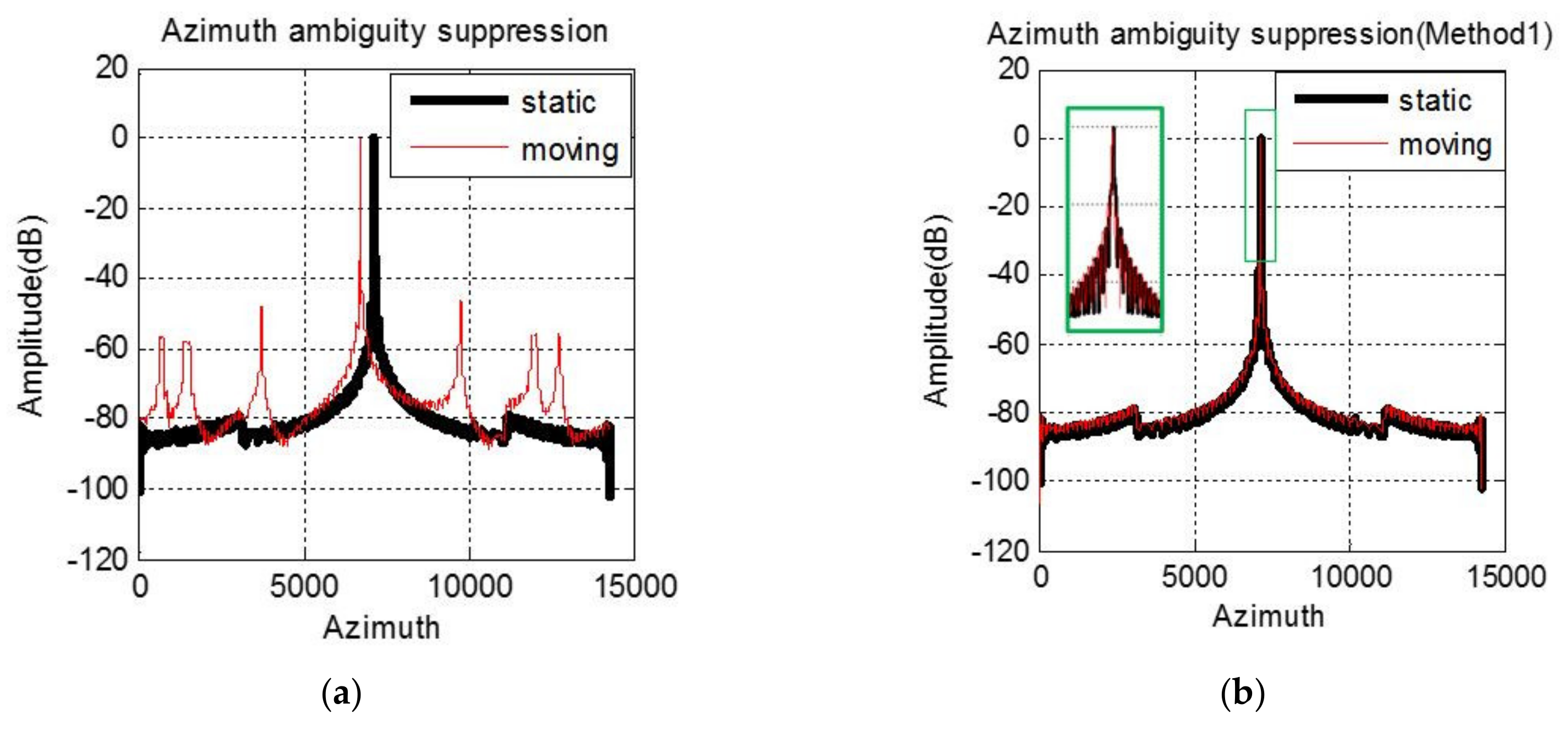
4. Experimental Results
4.1. Simulation Data
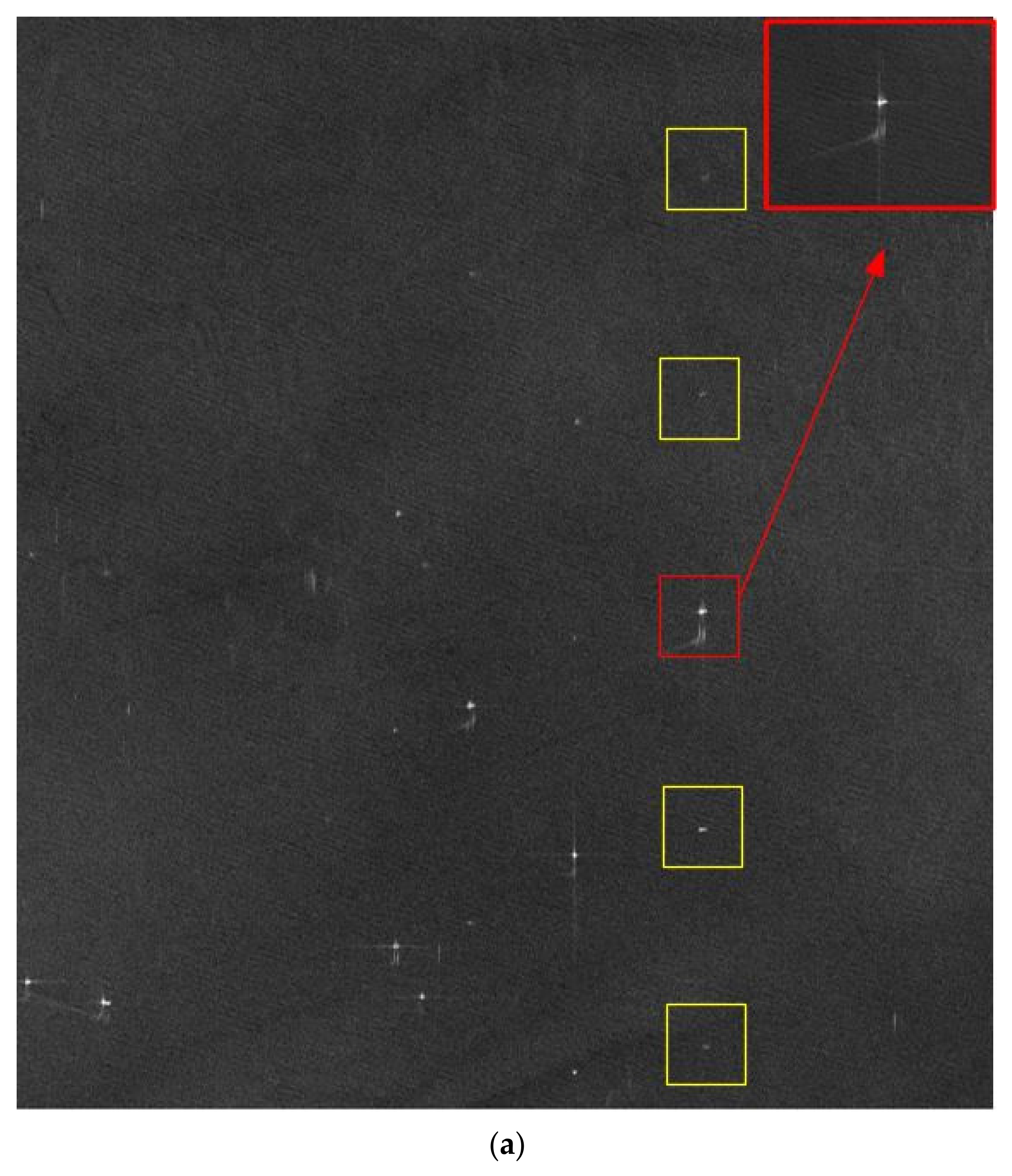
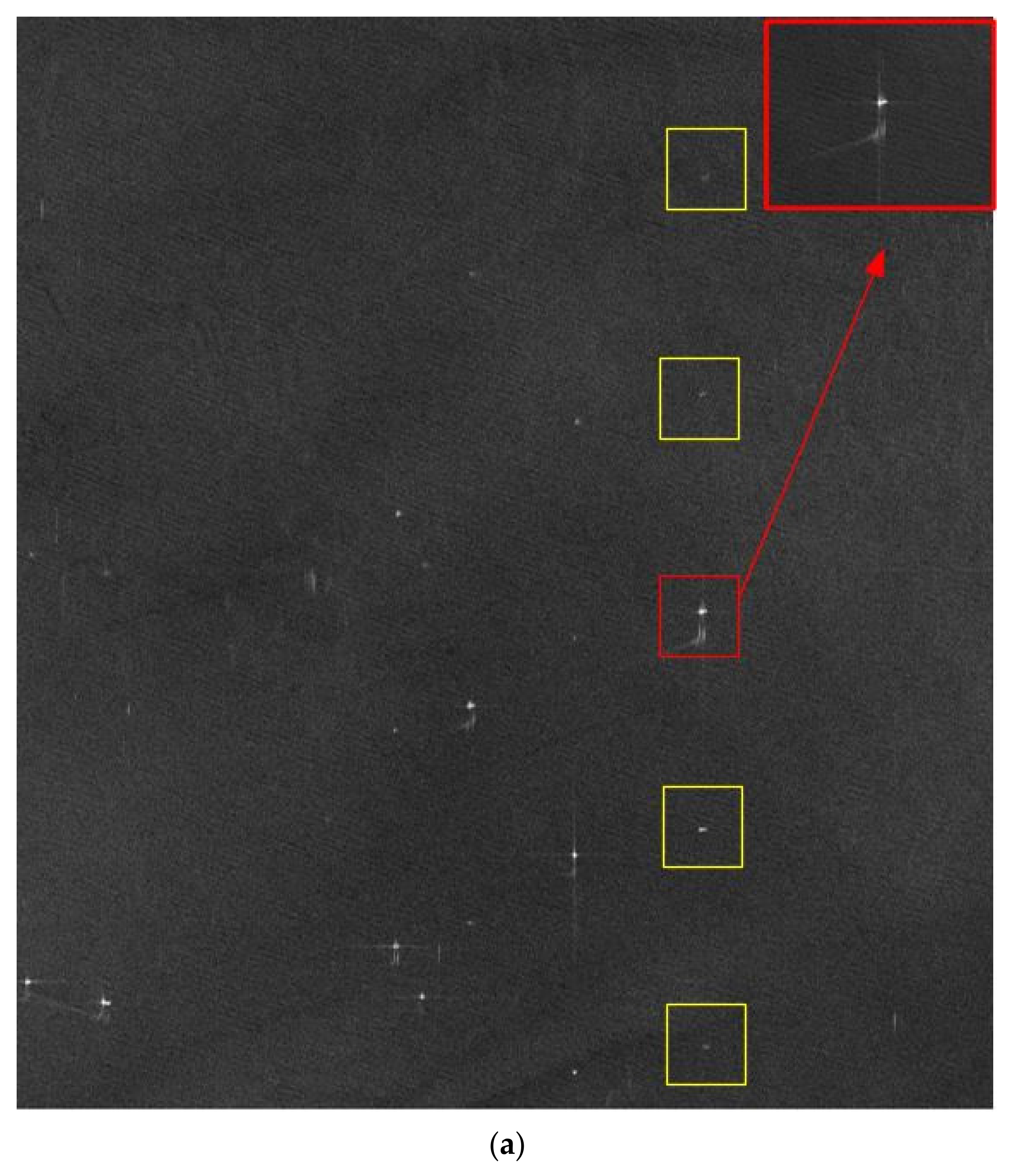
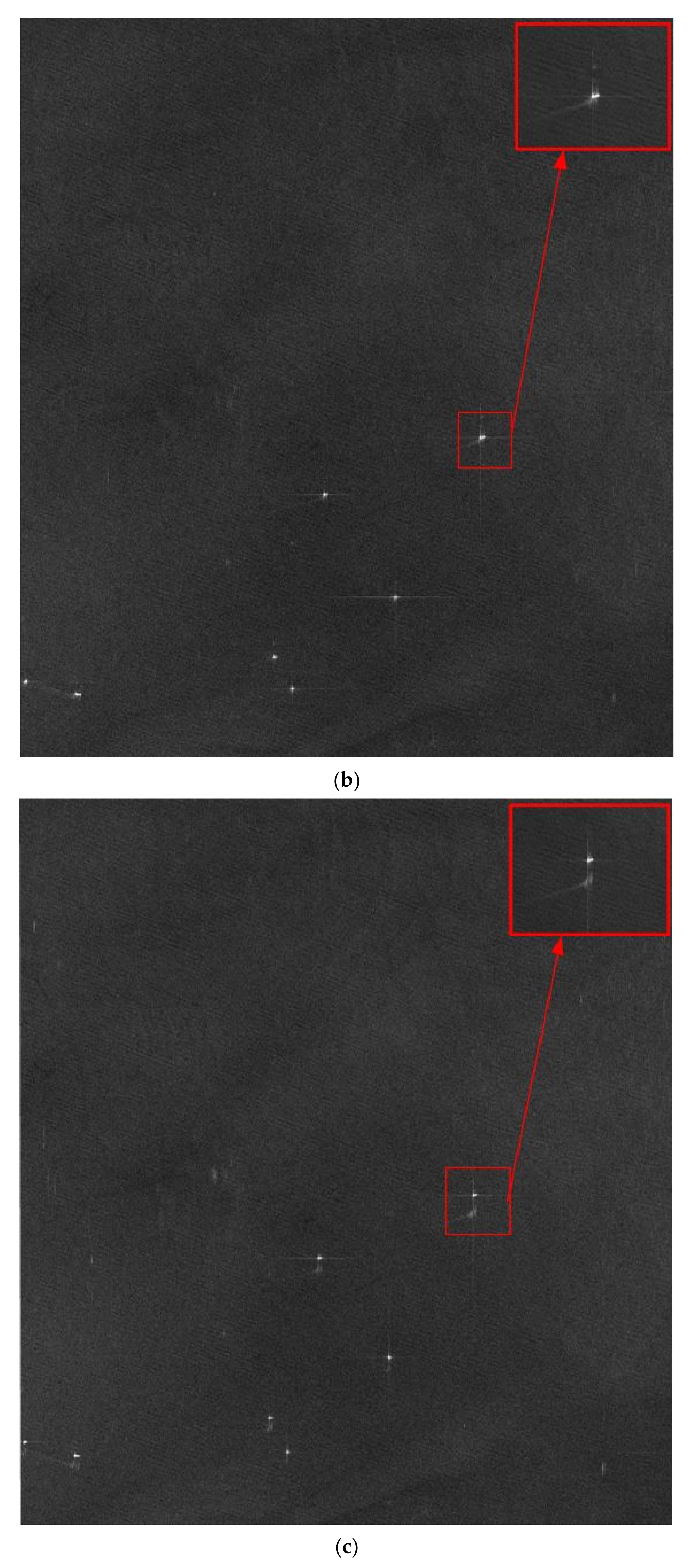
4.2. GF-3 UFS Mode Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.; Hensley, S.; Siqueira, P.; Curlander, J. The “Myth” of the minimum SAR antenna area constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef] [Green Version]
- Gebert, N.; Almeida, D.; Krieger, G. Airborne Demonstration of Multichannel SAR Imaging. IEEE Geosci Remote Sens. Lett. 2011, 8, 963–967. [Google Scholar] [CrossRef]
- Yang, T.; Li, Z.; Liu, Y.; Bao, Z. Channel error estimation methods for multichannel SAR systems in azimuth. IEEE Geosci Remote Sens. Lett. 2013, 10, 548–552. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Digital beamforming on receive: Techniques and optimization strategies or high-resolution wideswath SAR imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef] [Green Version]
- Baumgartner, S.V.; Krieger, G. Simultaneous high-resolution wide-swath SAR imaging and ground moving target indication: Processing approaches and system concepts. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5015–5029. [Google Scholar] [CrossRef]
- Zhang, S.; Xing, M.; Xia, X.; Guo, R.; Liu, Y.; Bao, Z. A Novel Moving Target Imaging Algorithm for HRWS SAR Based on Local Maximum-Likelihood Minimum Entropy. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5333–5348. [Google Scholar] [CrossRef]
- Yang, T.; Wang, Y.; Li, W. A Moving Target Imaging Algorithm for HRWS SAR/GMTI Systems. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1147–1157. [Google Scholar] [CrossRef]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous imaging of static scenes and moving targets with the first Chinese dual-channel spaceborne SAR sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Qiu, X.; Shang, M.; Lv, S.; Zhong, L.; Ding, C. Radial Velocity Estimation of Ships on Open Sea in the Azimuth Multichannel SAR System. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3787–3798. [Google Scholar] [CrossRef]
- Yang, J.; Qiu, X.; Zhong, L.; Shang, M.; Ding, C. A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor. Remote Sens. 2019, 11, 2275. [Google Scholar] [CrossRef] [Green Version]
- Cumming, I.; Dettwiler, M.; Wong, F. Digital Signal Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Shang, M.; Qiu, X.; Han, B.; Ding, C.; Hu, Y. Channel imbalances and along-track baseline estimation for the GF-3 azimuth multichannel mode. Remote Sens. 2019, 11, 1297. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radial Velocity | SCR (Range Compression Domain) | |
|---|---|---|
| Ship 1 | 3.28 m/s | 18.25 dB |
| Ship 2 | 2.89 m/s | 17.03 dB |
| Ship 3 | 3.40 m/s | 24.45 dB |
| Ship 4 | 2.46 m/s | 24.07 dB |
| Ship 5 | 3.38 m/s | 17.11 dB |
| Ship 6 | 4.12 m/s | 21.65 dB |
| Ship 7 | 5.98 m/s | 20.87 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Qiu, X.; Shang, M.; Zhong, L.; Ding, C. Motion Phase Compensation Methods for Azimuth Ambiguity Suppression in HRWS SAR. Remote Sens. 2021, 13, 3543. https://doi.org/10.3390/rs13173543
Yang J, Qiu X, Shang M, Zhong L, Ding C. Motion Phase Compensation Methods for Azimuth Ambiguity Suppression in HRWS SAR. Remote Sensing. 2021; 13(17):3543. https://doi.org/10.3390/rs13173543
Chicago/Turabian StyleYang, Junying, Xiaolan Qiu, Mingyang Shang, Lihua Zhong, and Chibiao Ding. 2021. "Motion Phase Compensation Methods for Azimuth Ambiguity Suppression in HRWS SAR" Remote Sensing 13, no. 17: 3543. https://doi.org/10.3390/rs13173543
APA StyleYang, J., Qiu, X., Shang, M., Zhong, L., & Ding, C. (2021). Motion Phase Compensation Methods for Azimuth Ambiguity Suppression in HRWS SAR. Remote Sensing, 13(17), 3543. https://doi.org/10.3390/rs13173543