
Performance of Camera-Based Vibration Monitoring Systems in Input-Output Modal Identification Using Shaker Excitation


Abstract
:1. Introduction
2. Materials and Methods
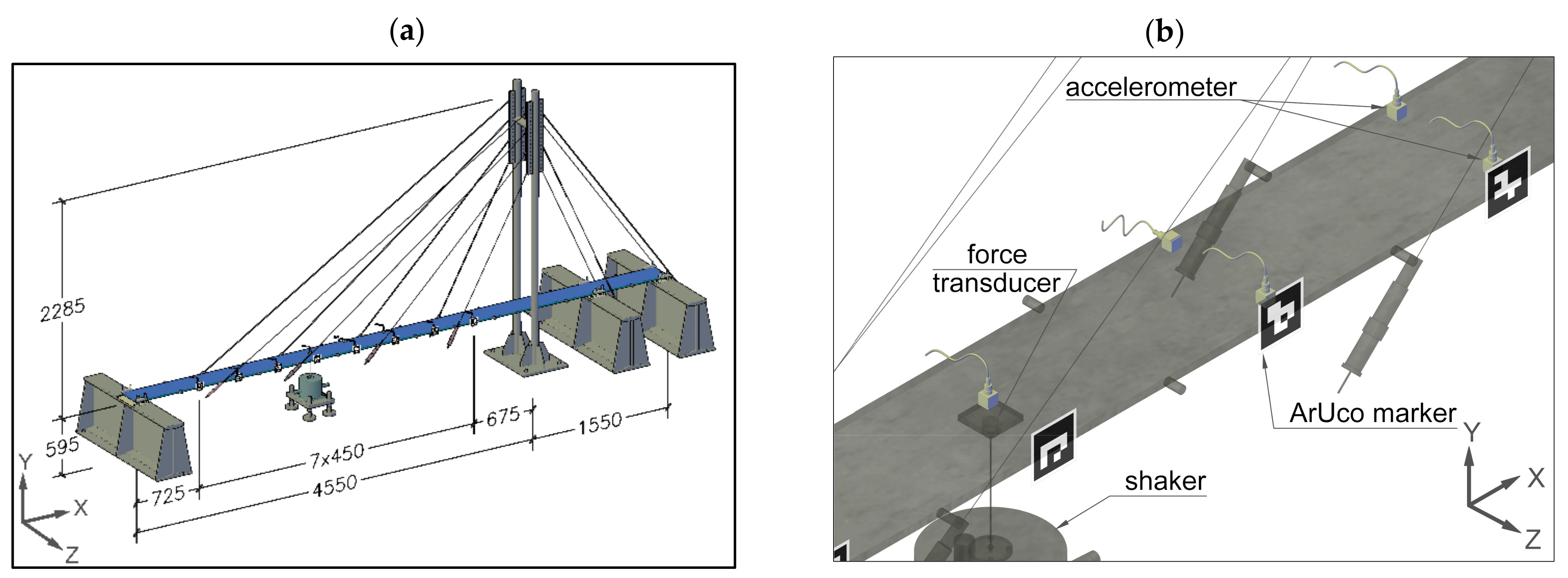
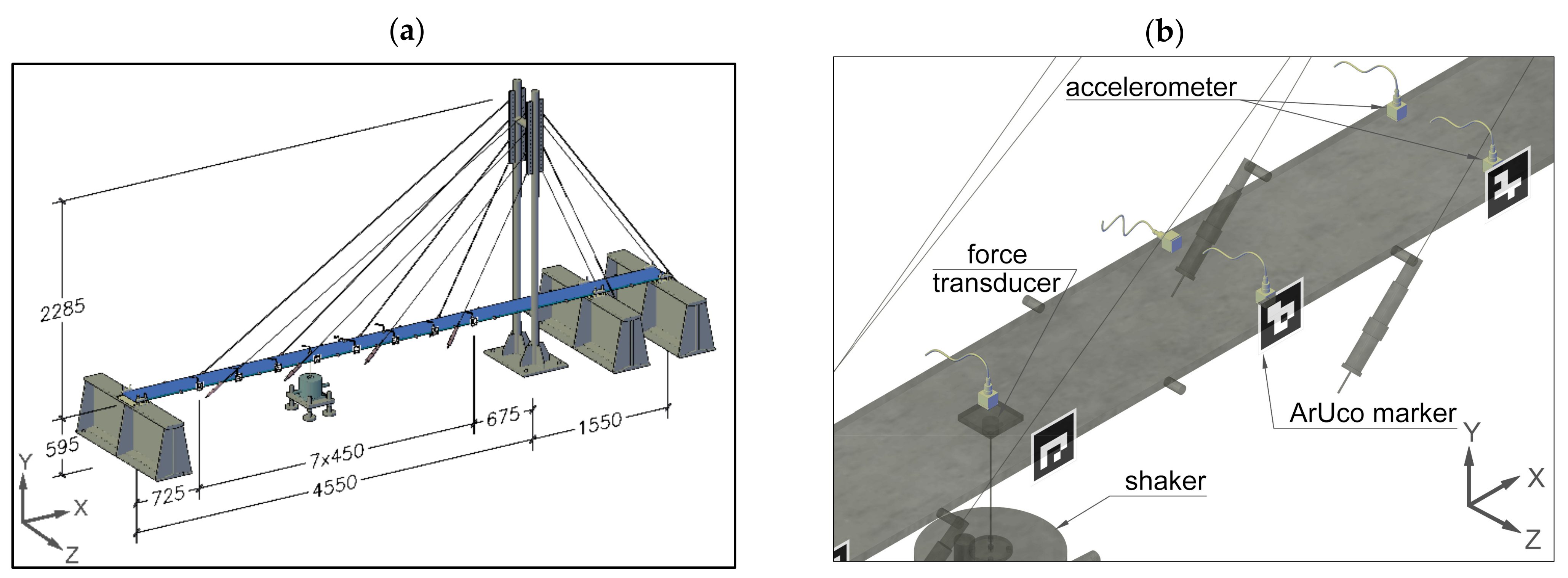
2.1. Bridge Model
2.2. Instrumentation
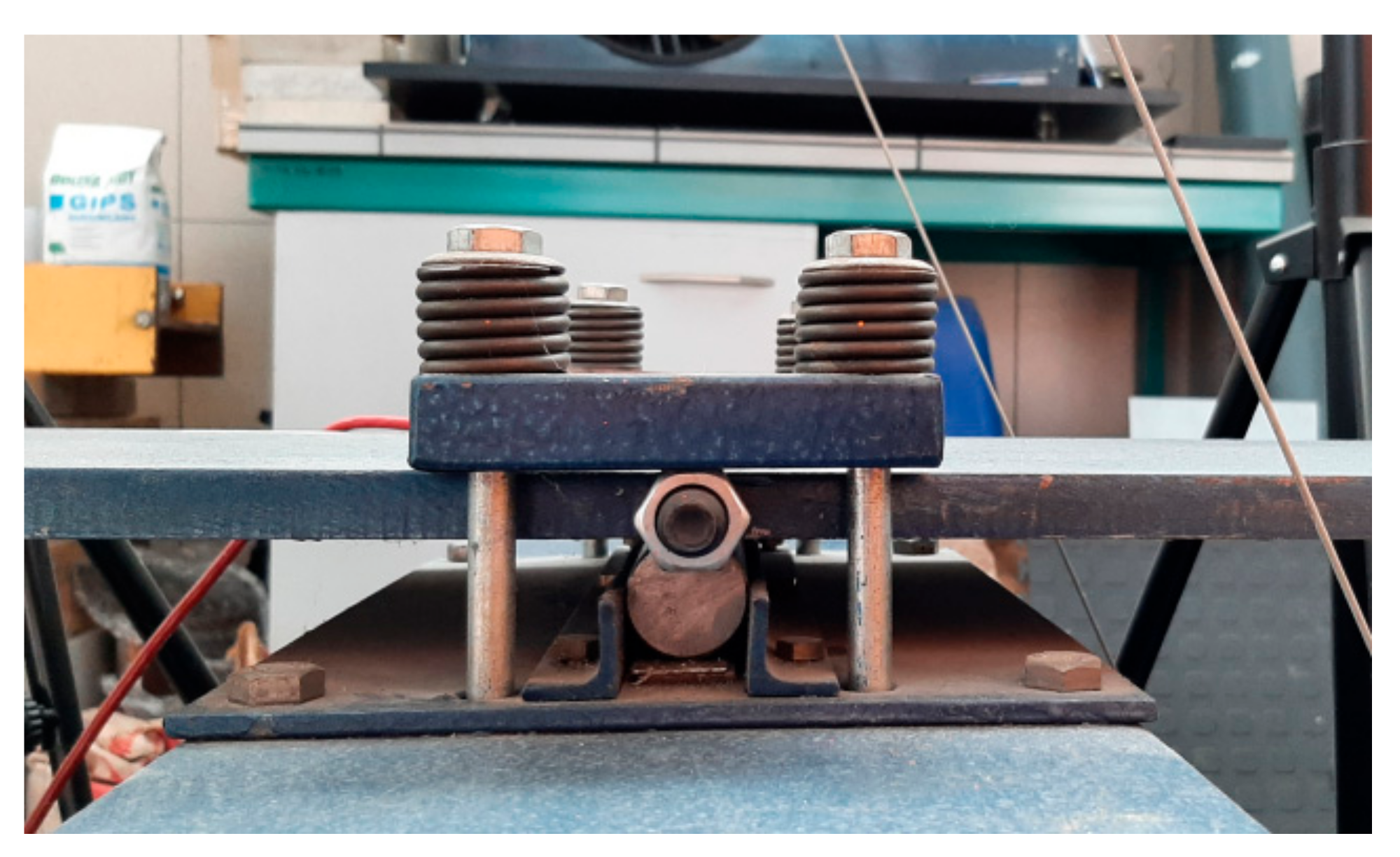
2.2.1. Vibration Exciter
2.2.2. Accelerometers
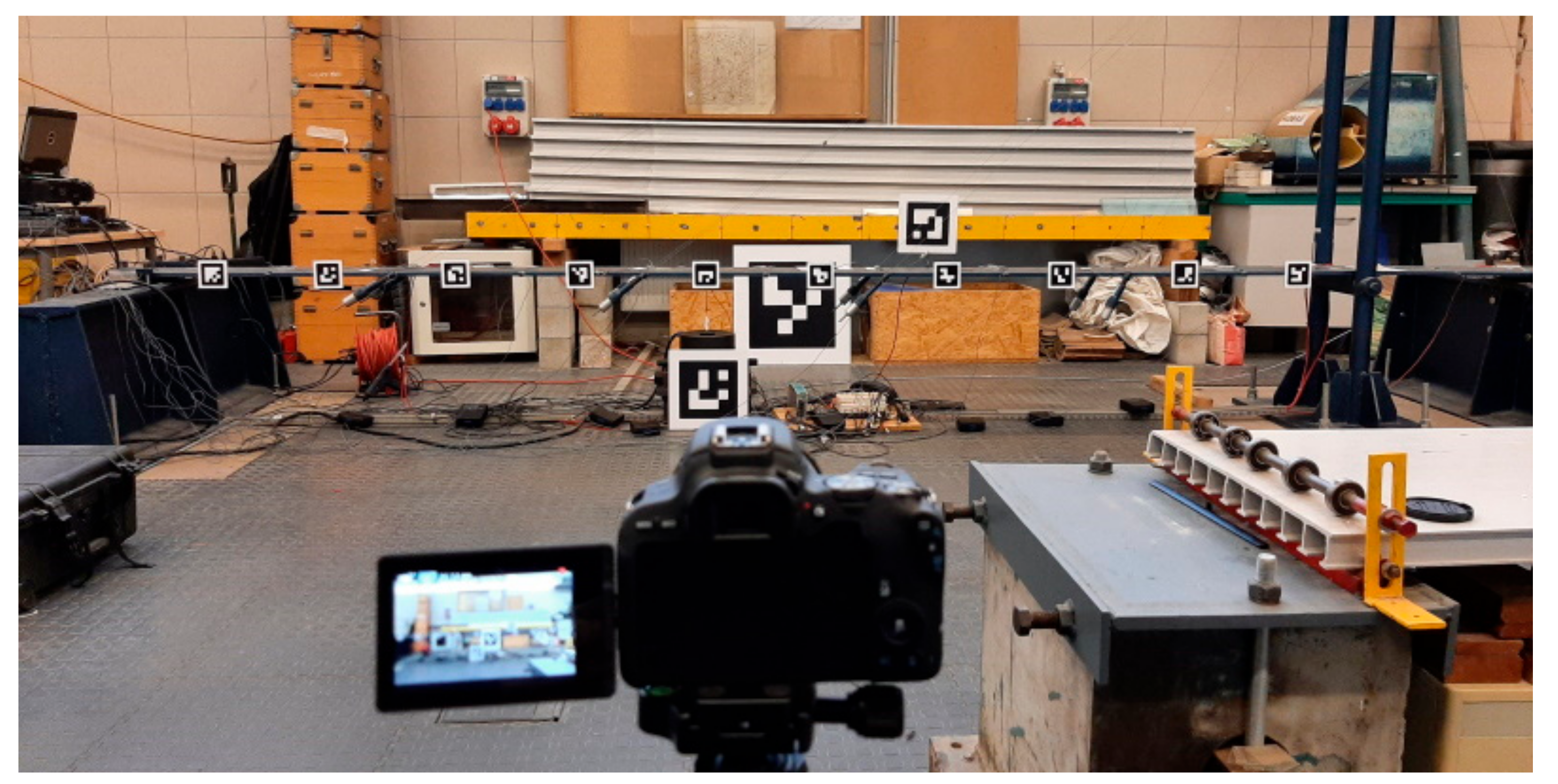
2.2.3. Optical Motion Capture System
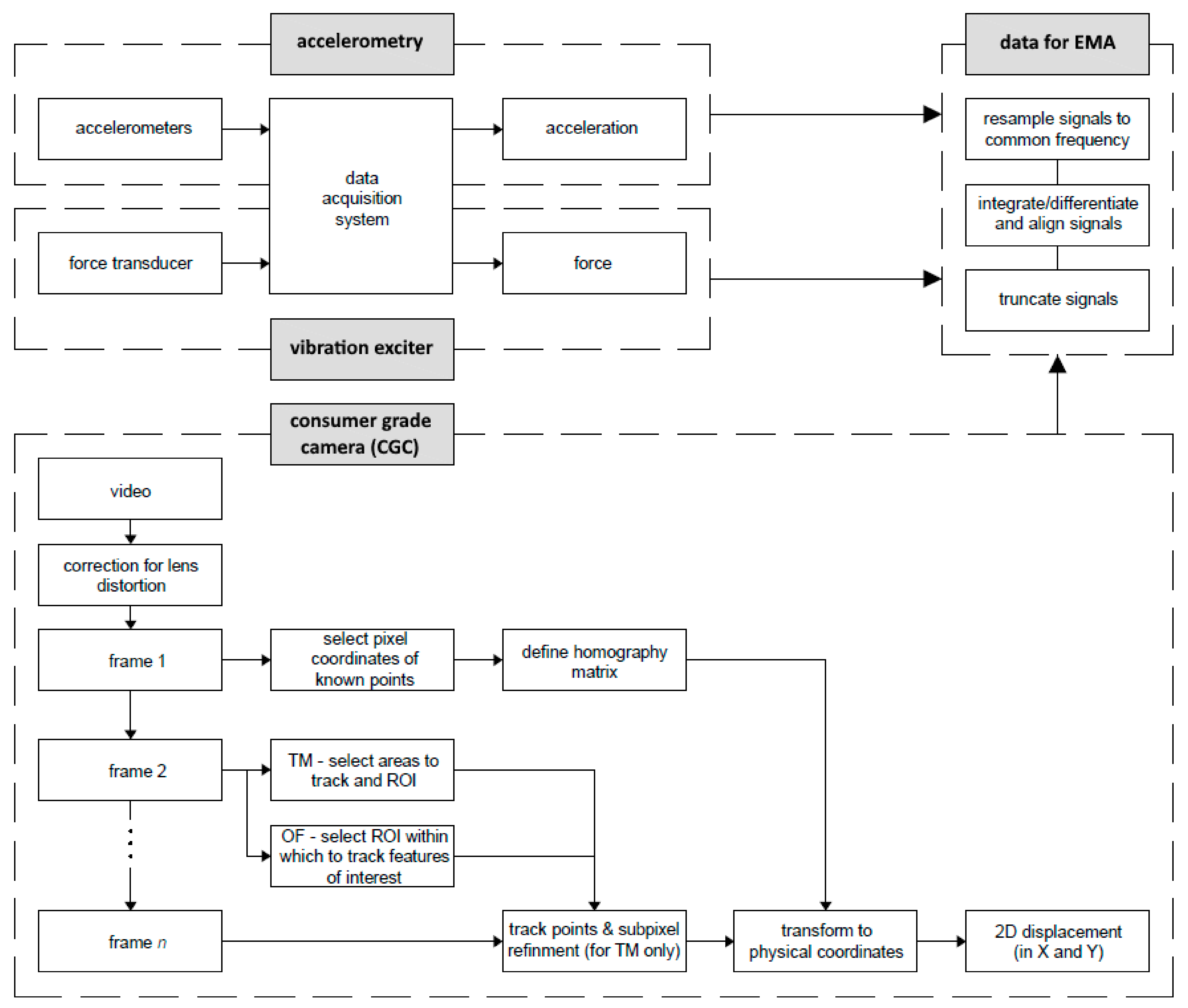
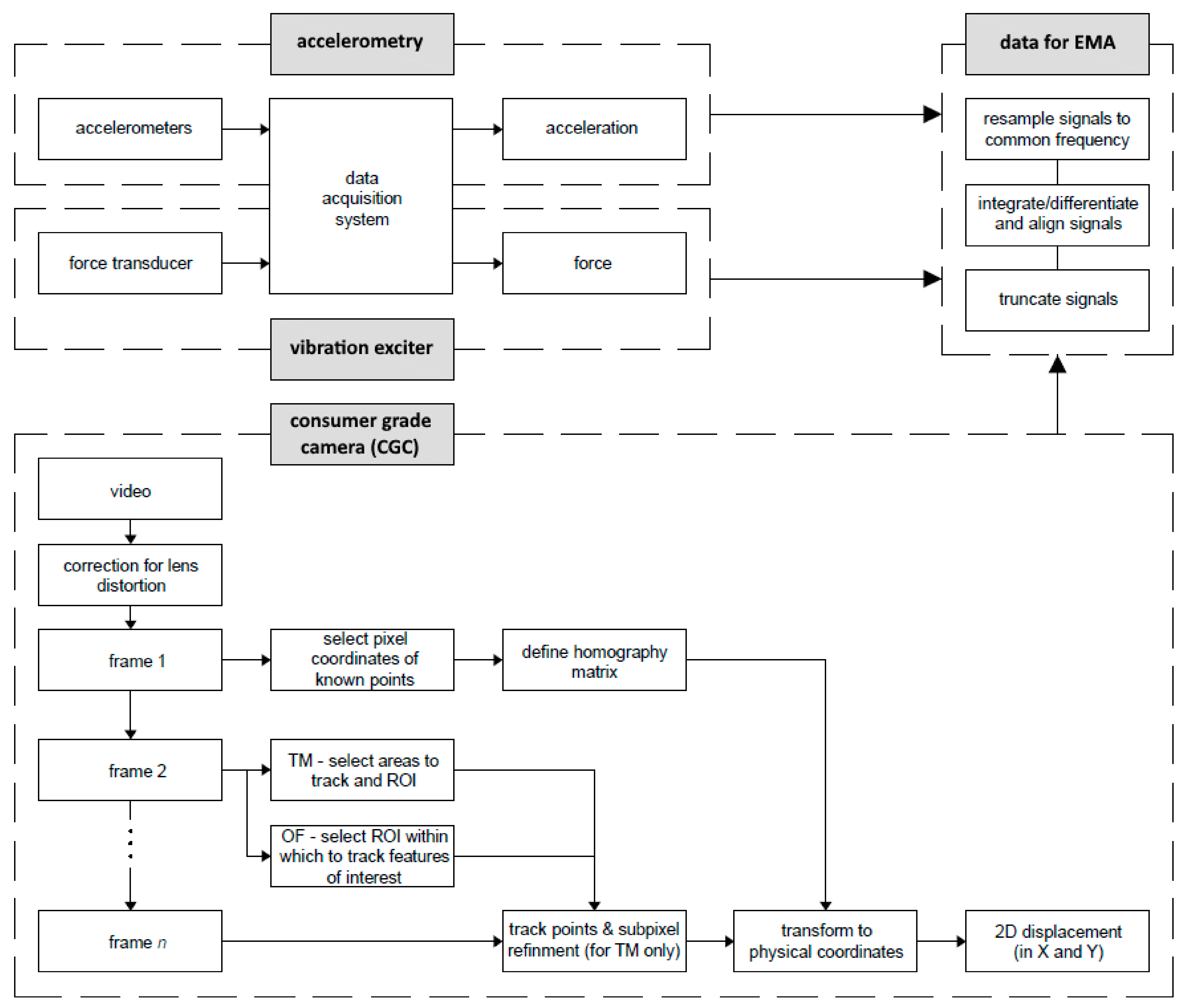
2.3. Data Processing
2.3.1. Signal Resampling and Time Alignment
2.3.2. Modal Analysis
3. Results
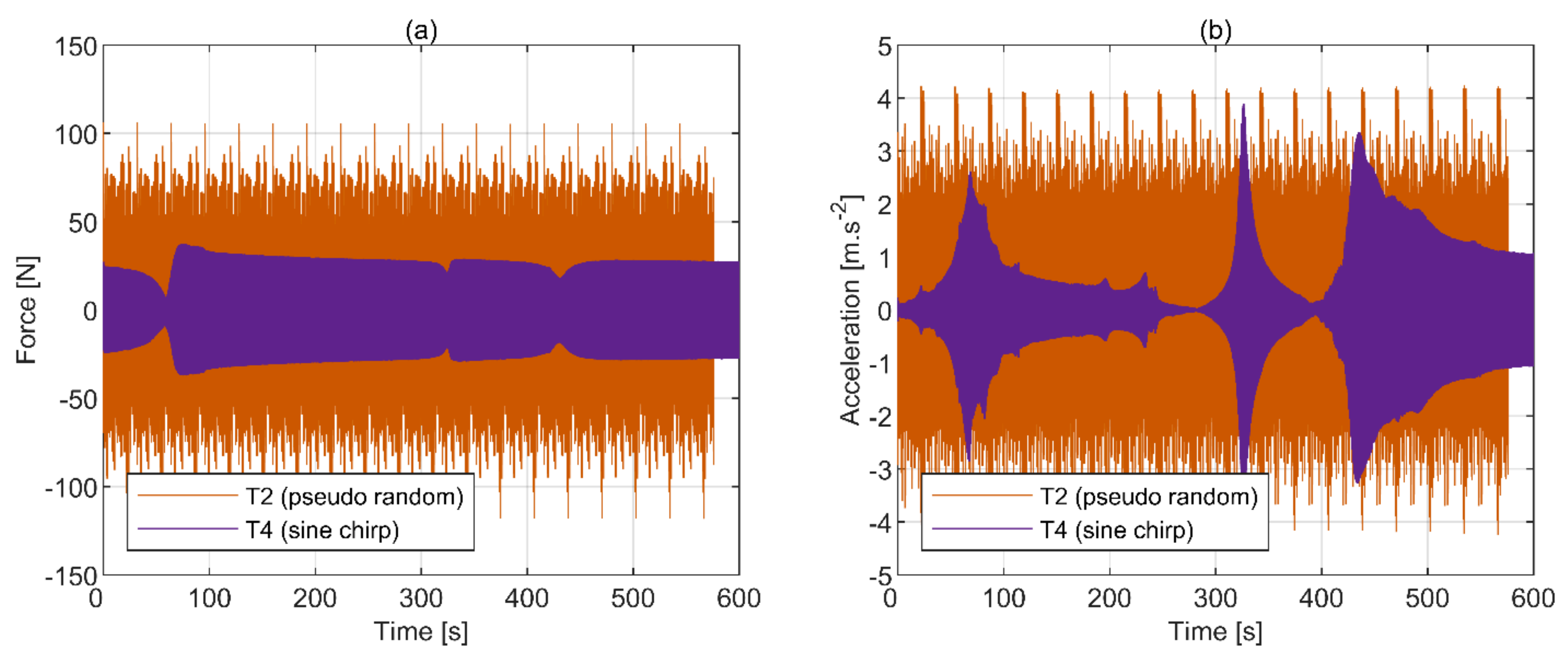
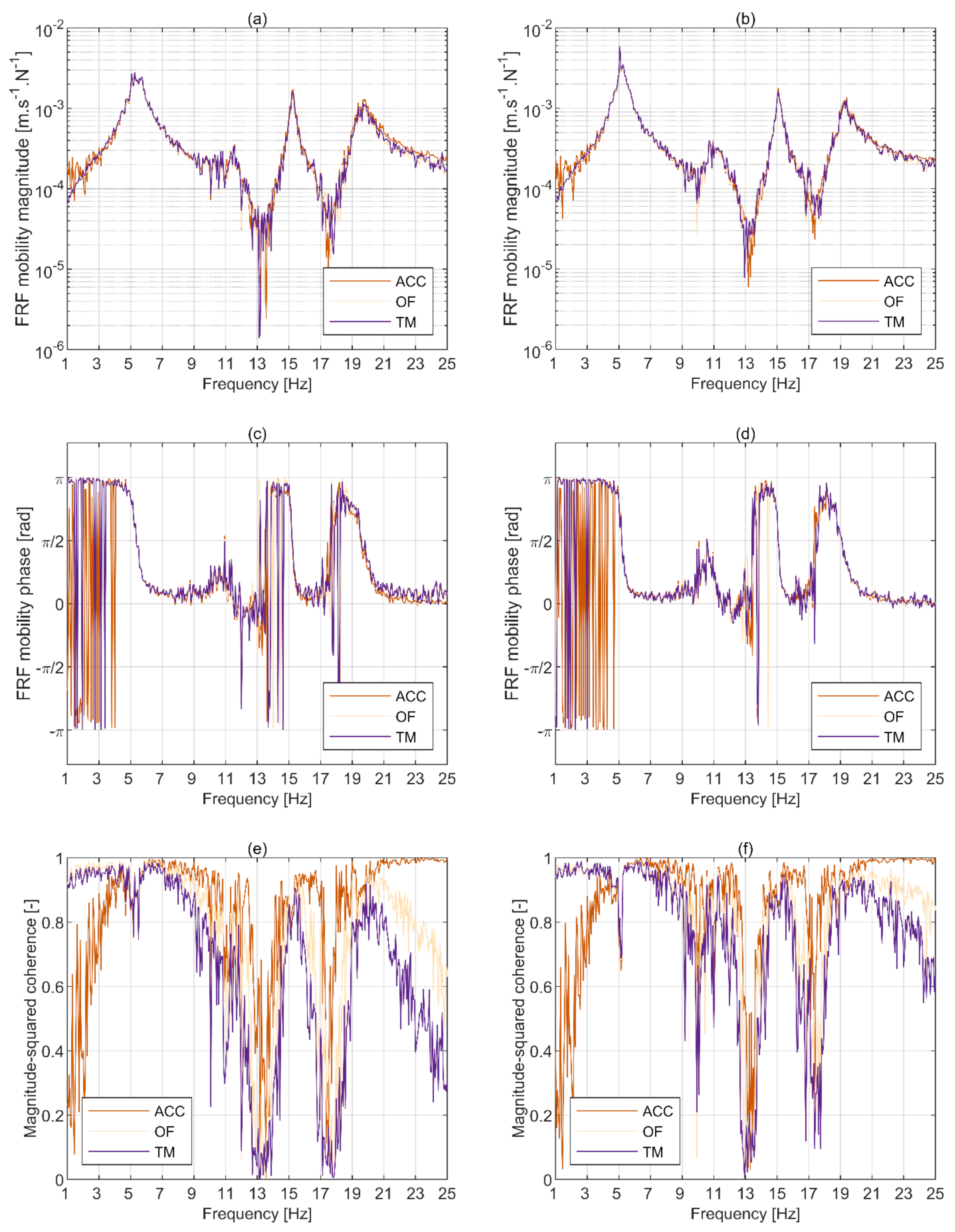
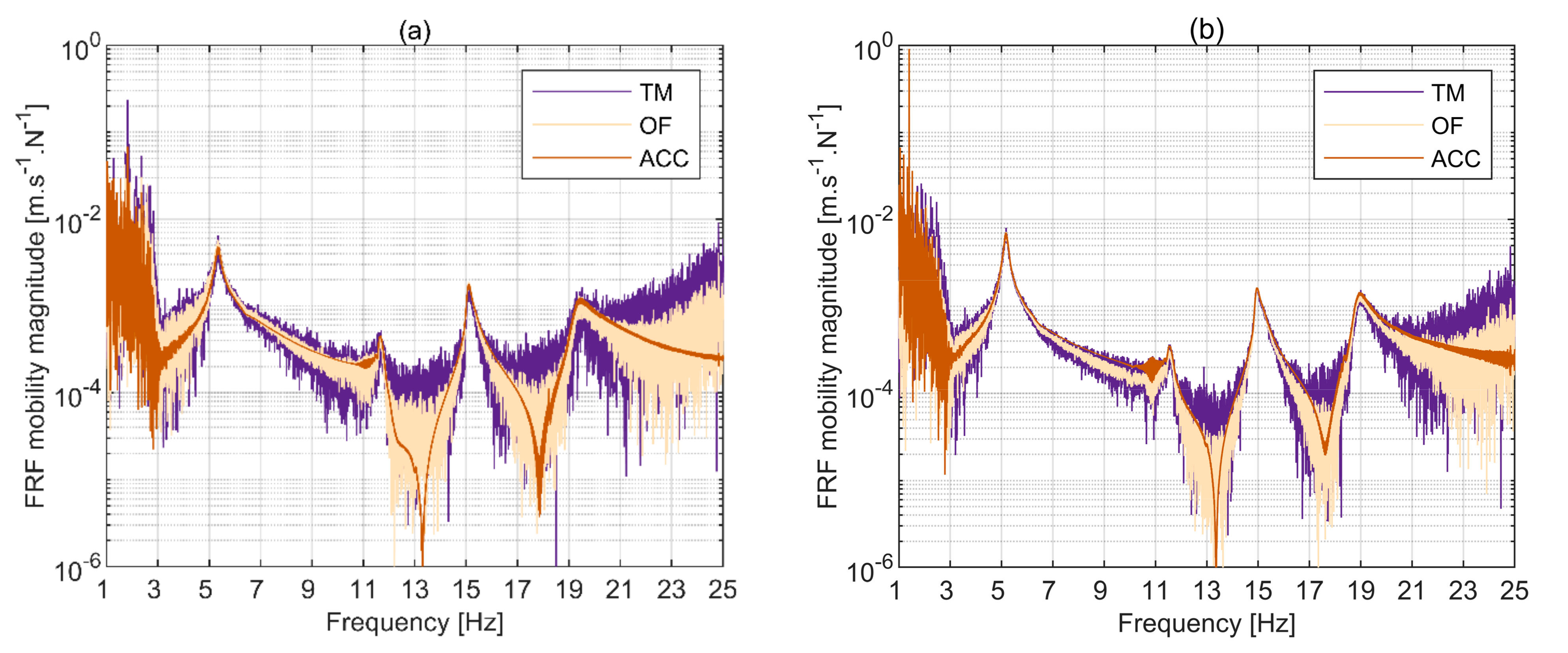
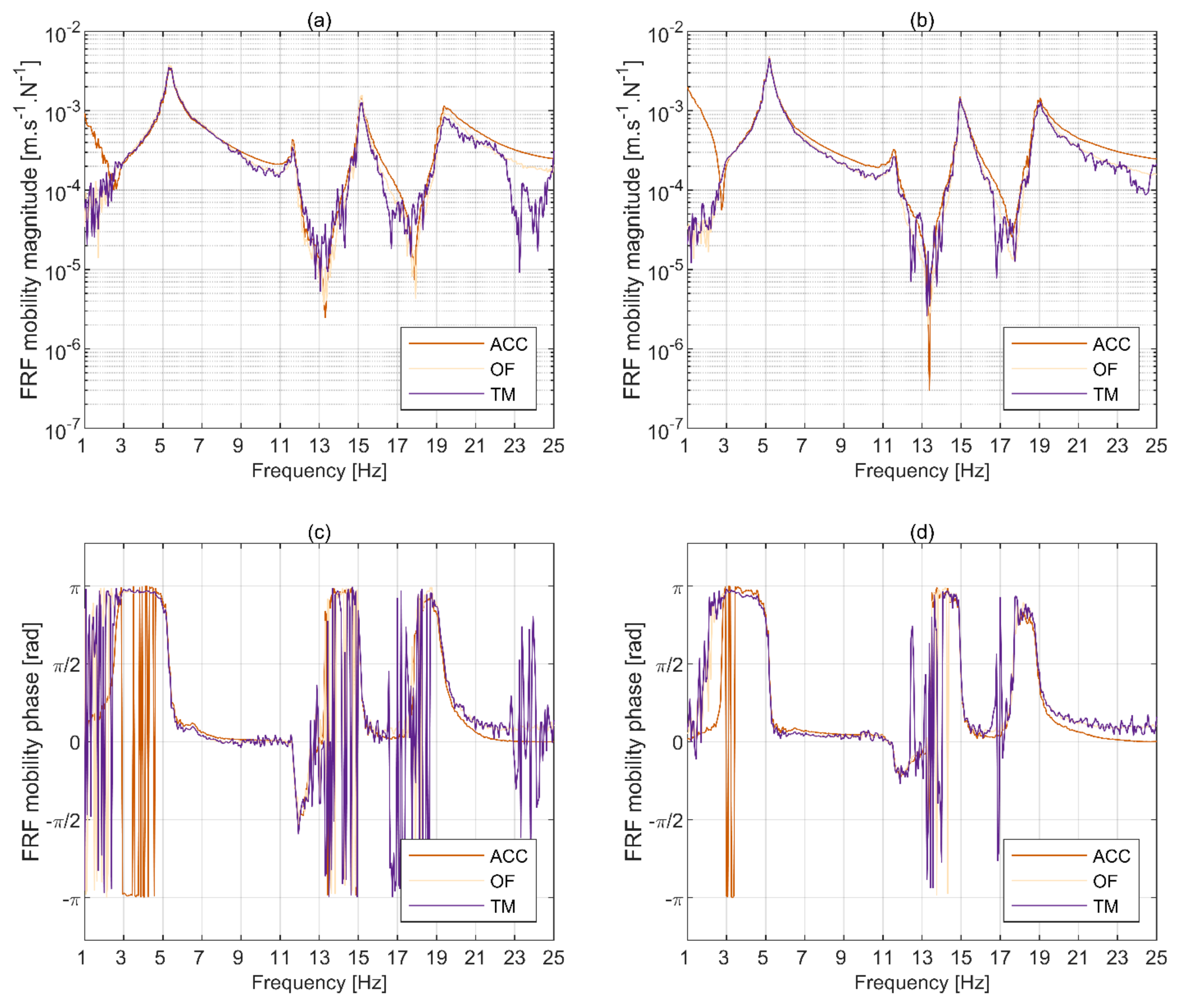
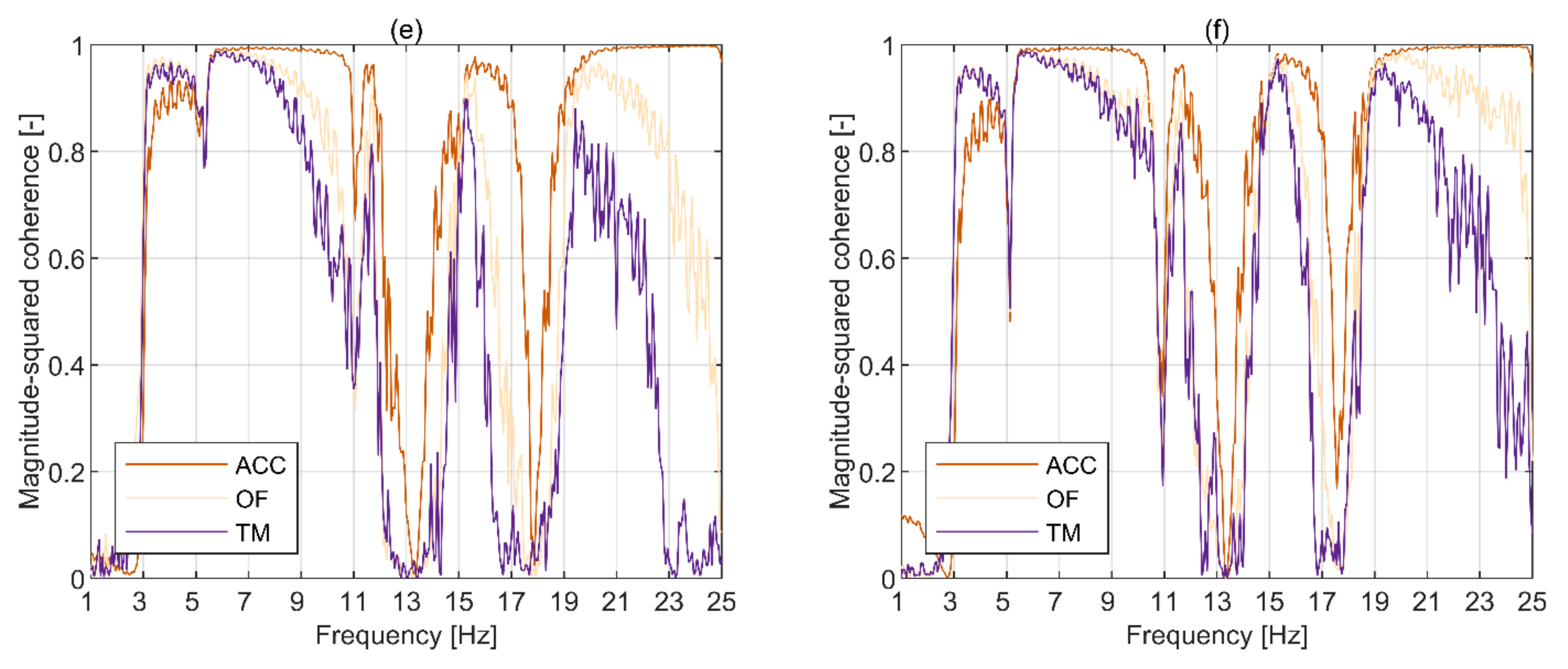
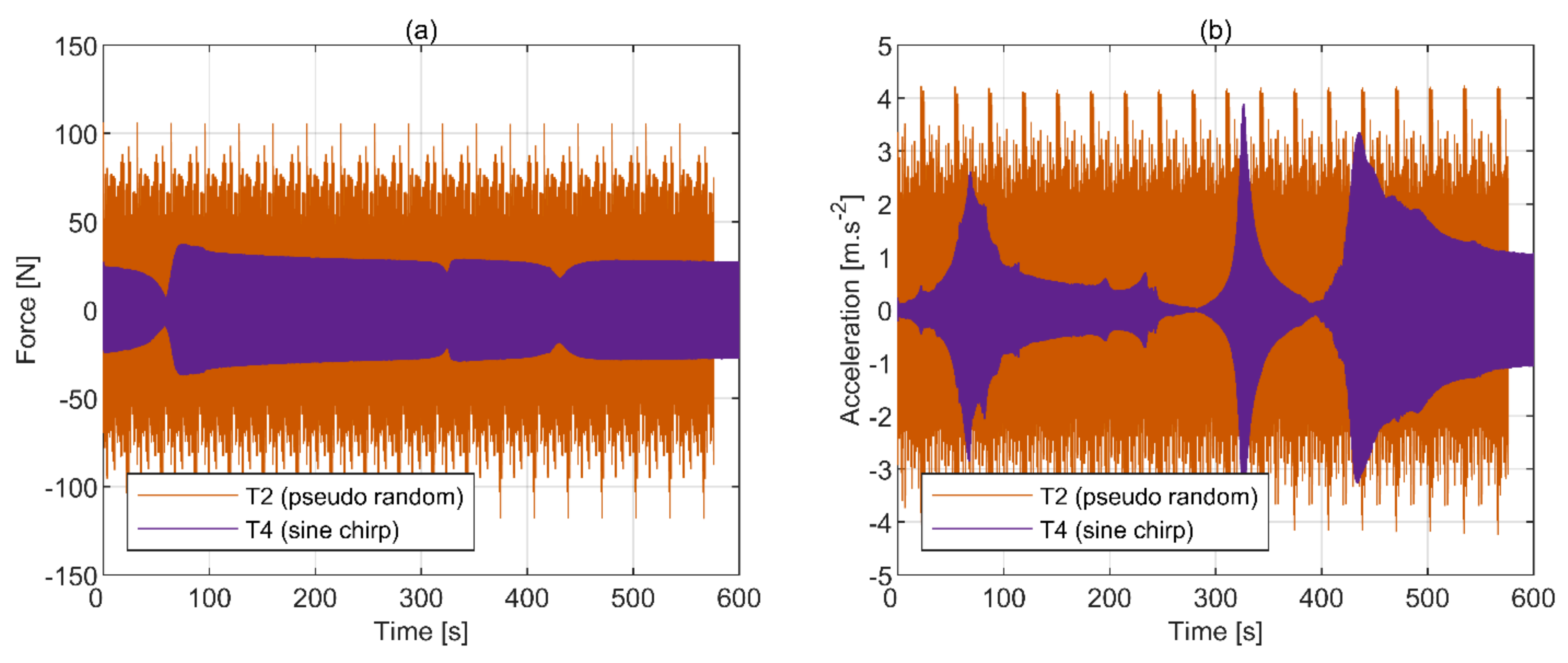
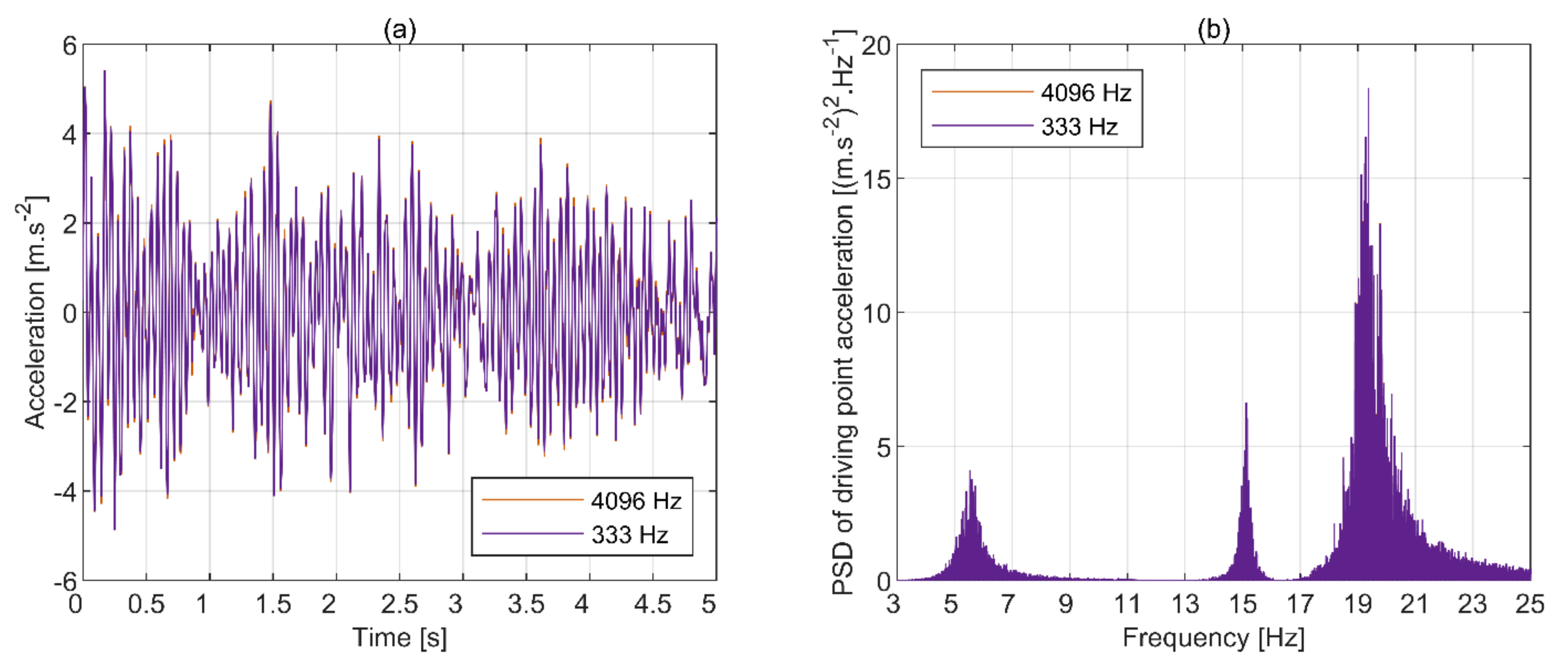
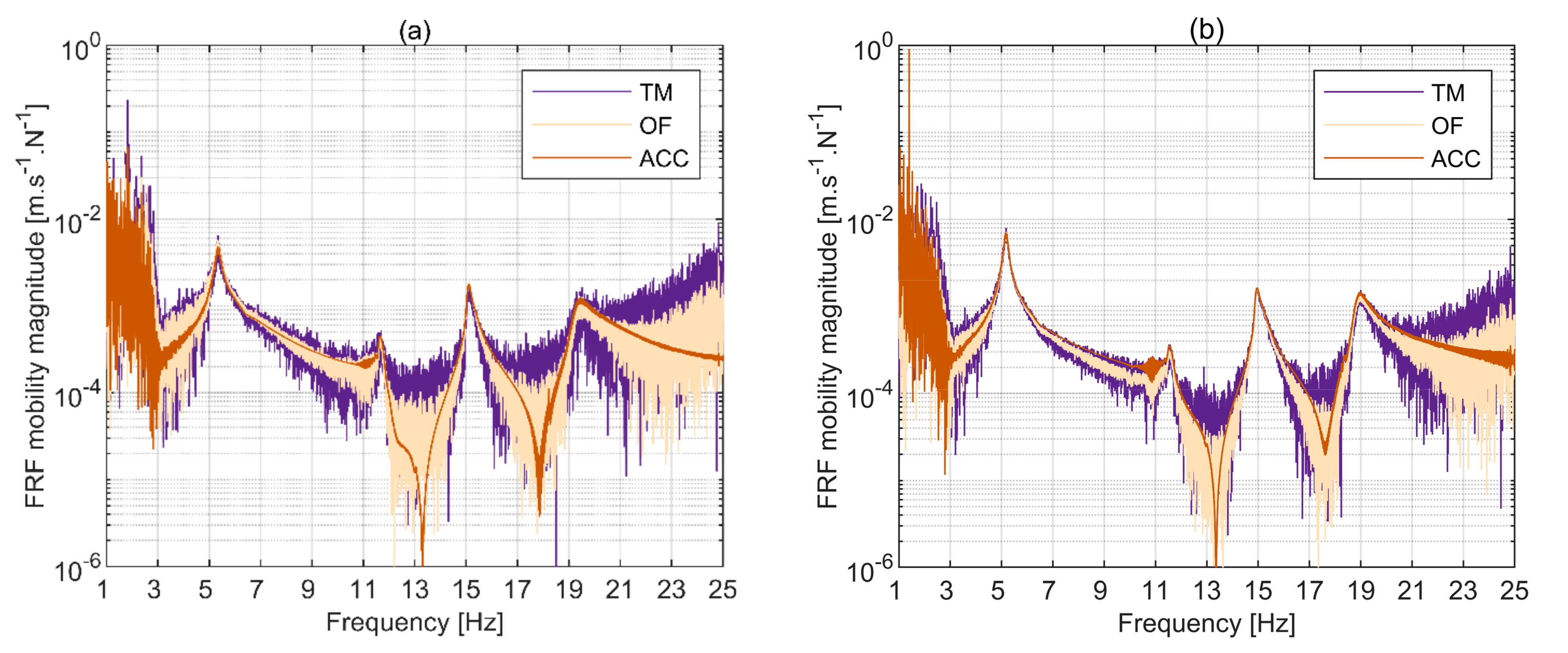
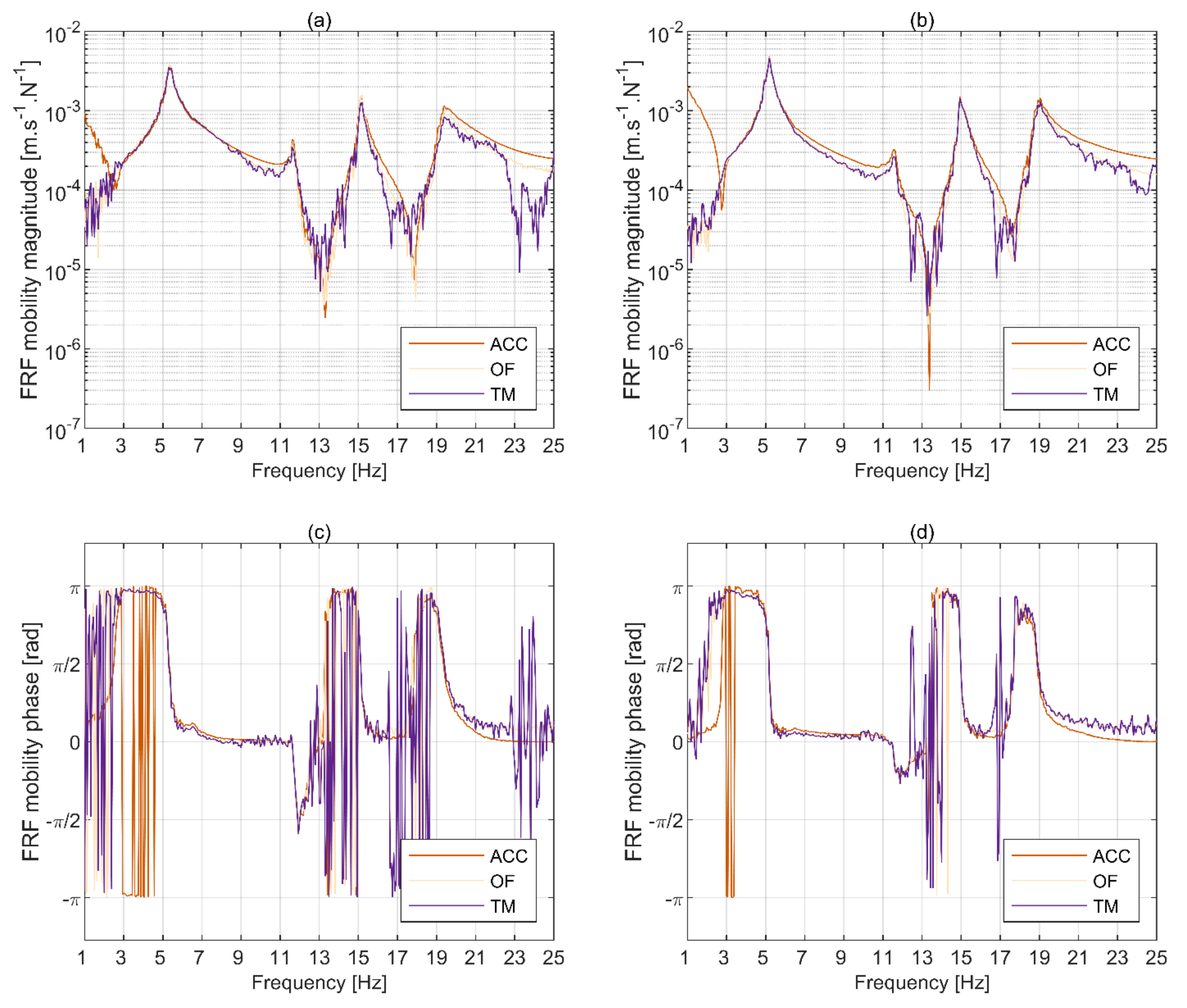
3.1. Quality of Data
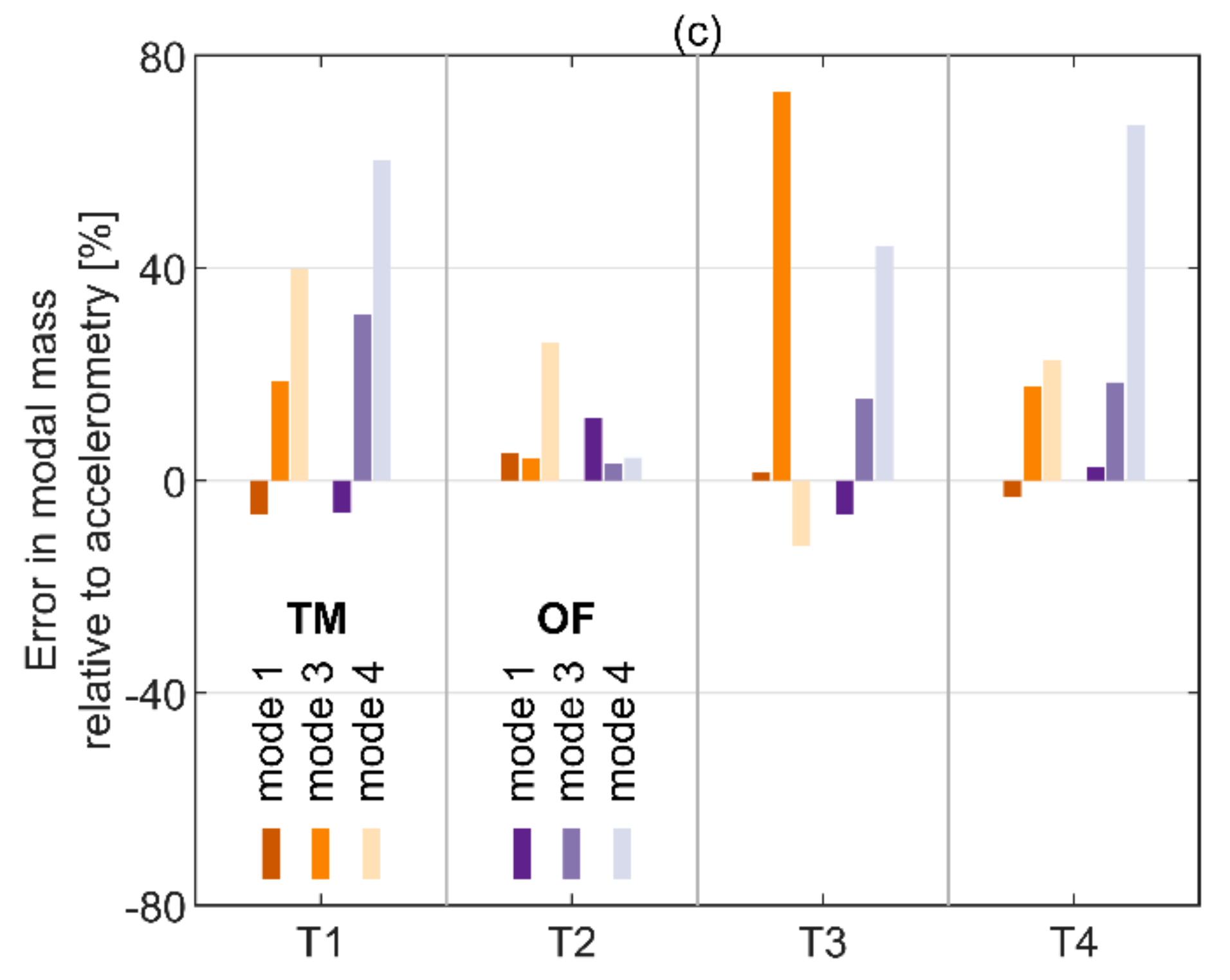
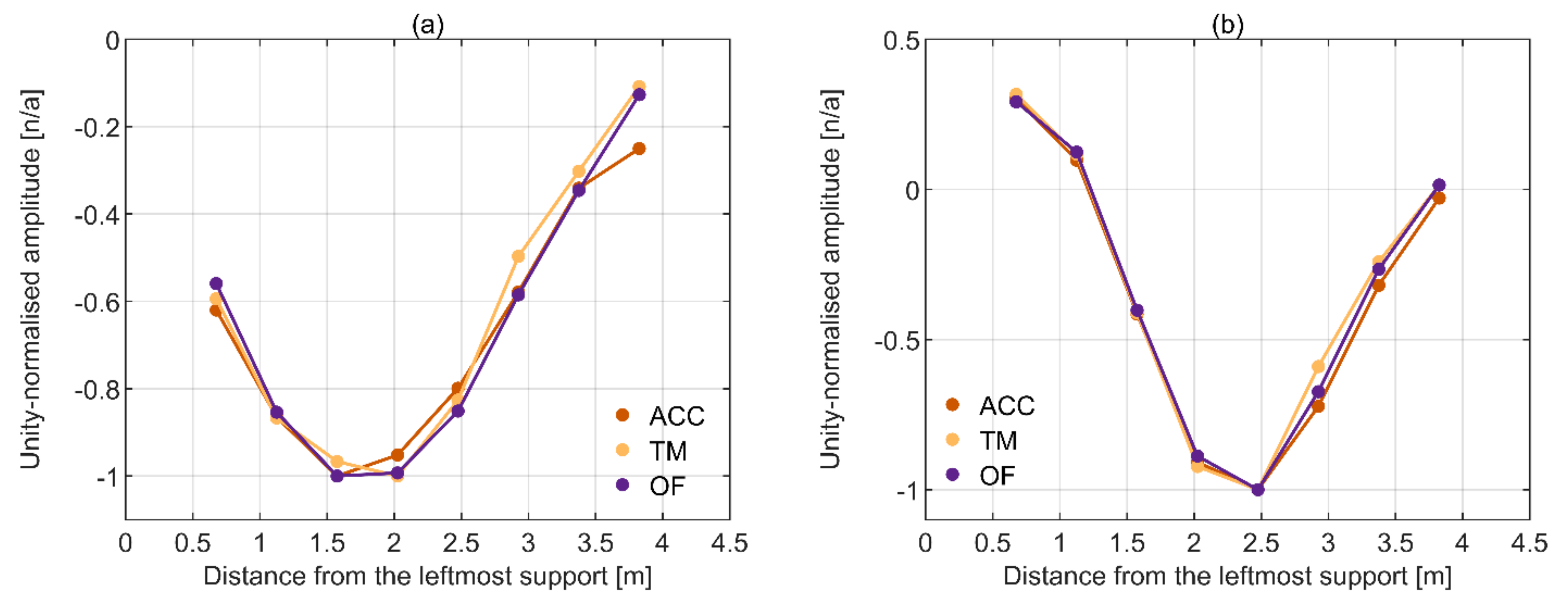
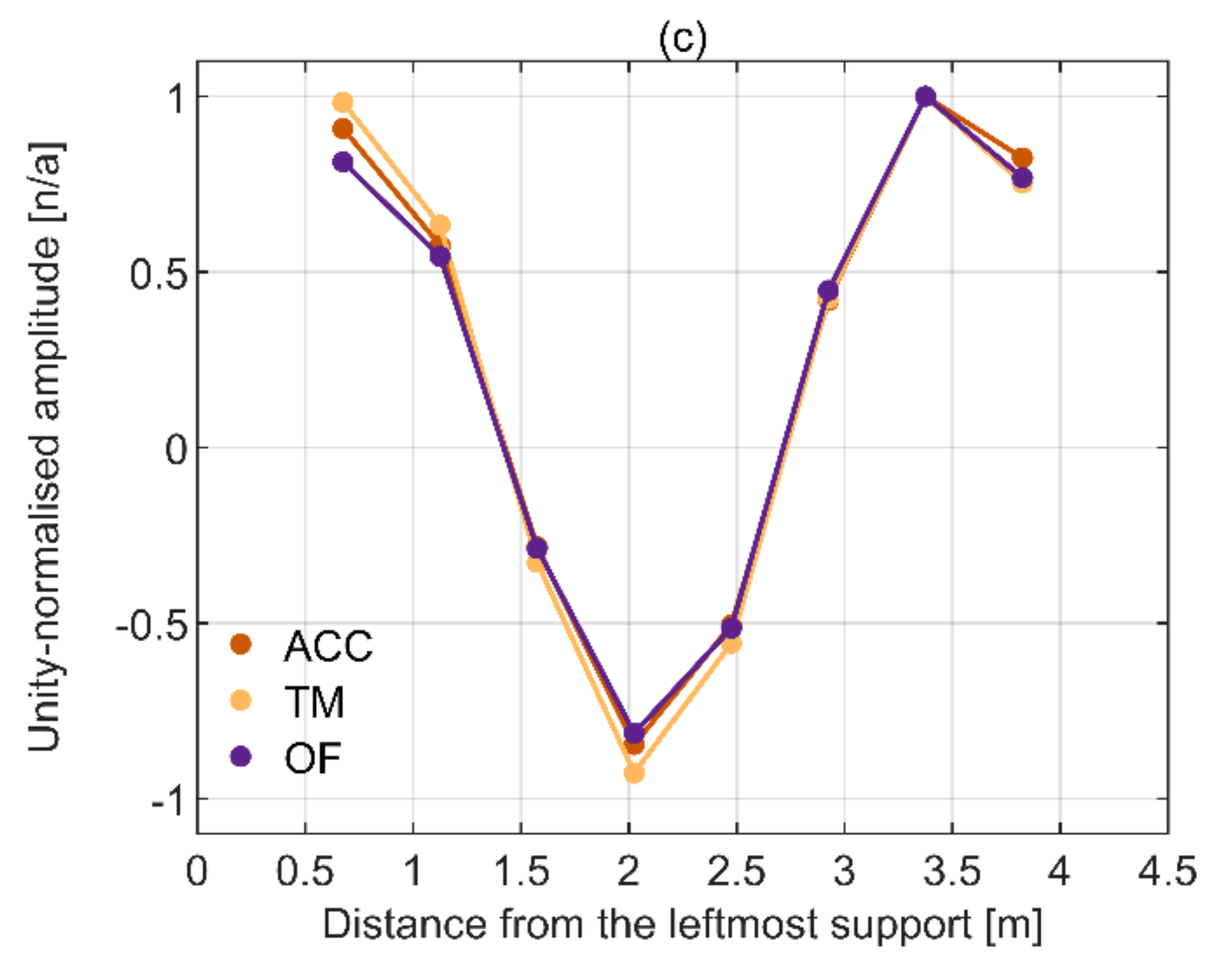
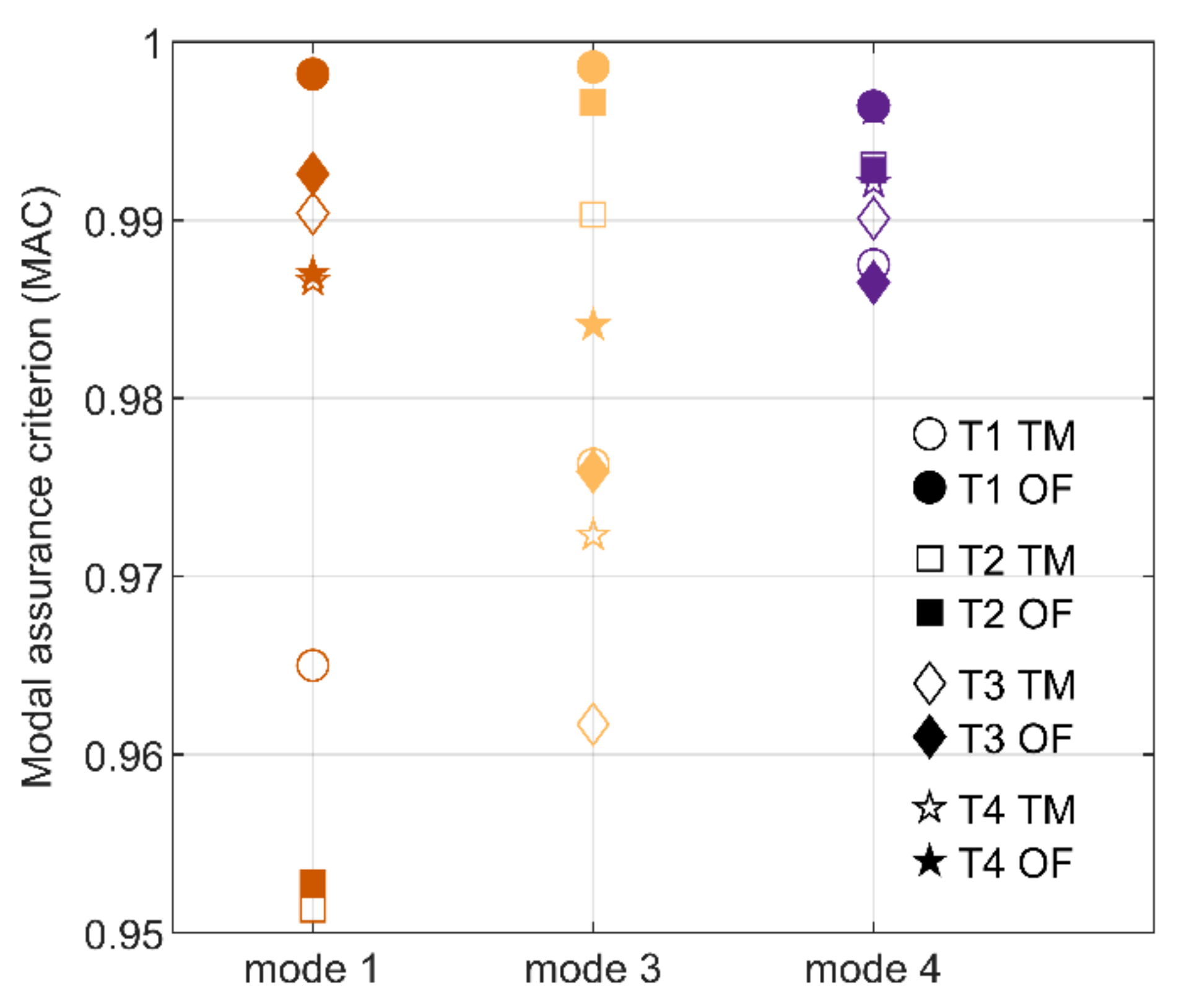
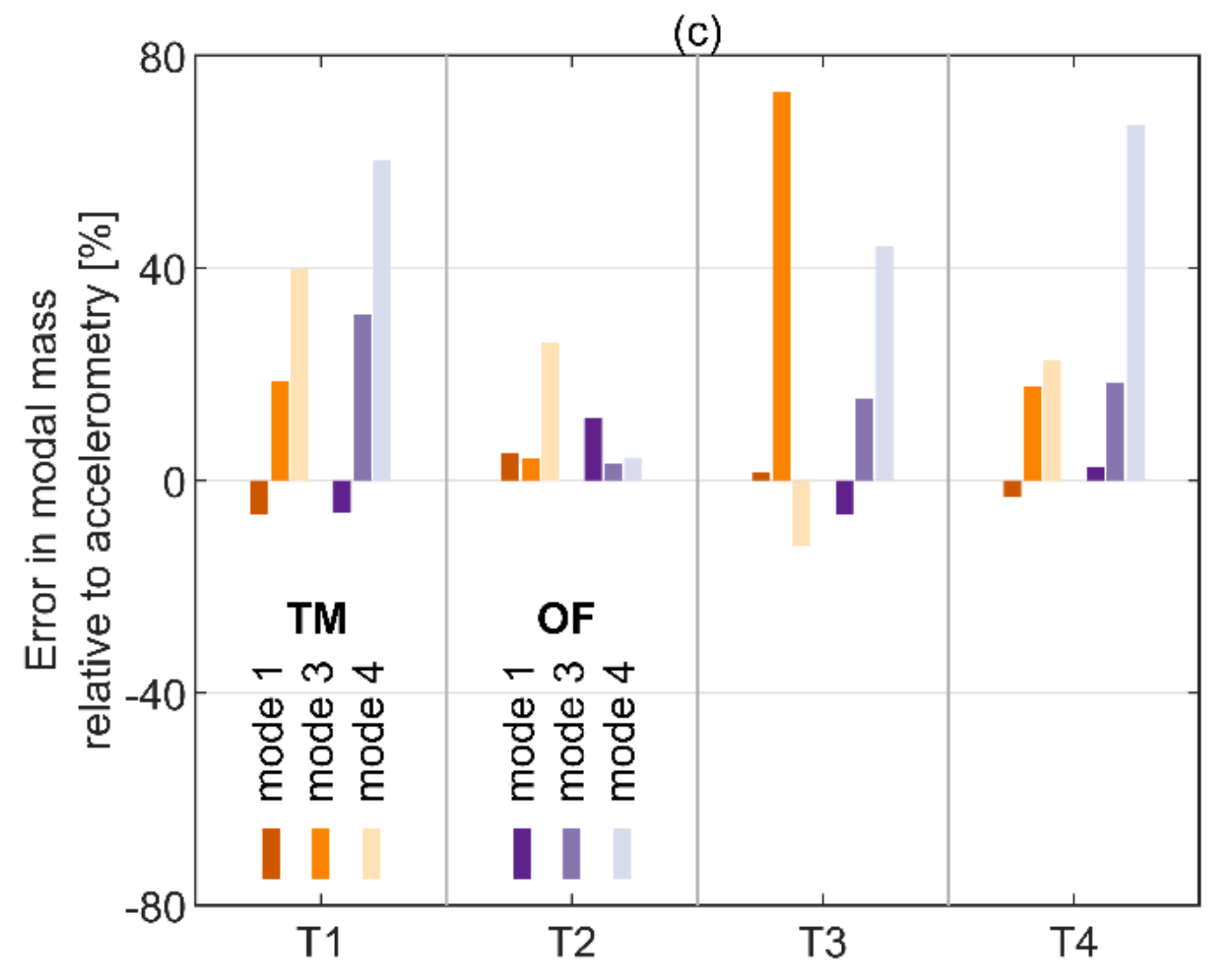
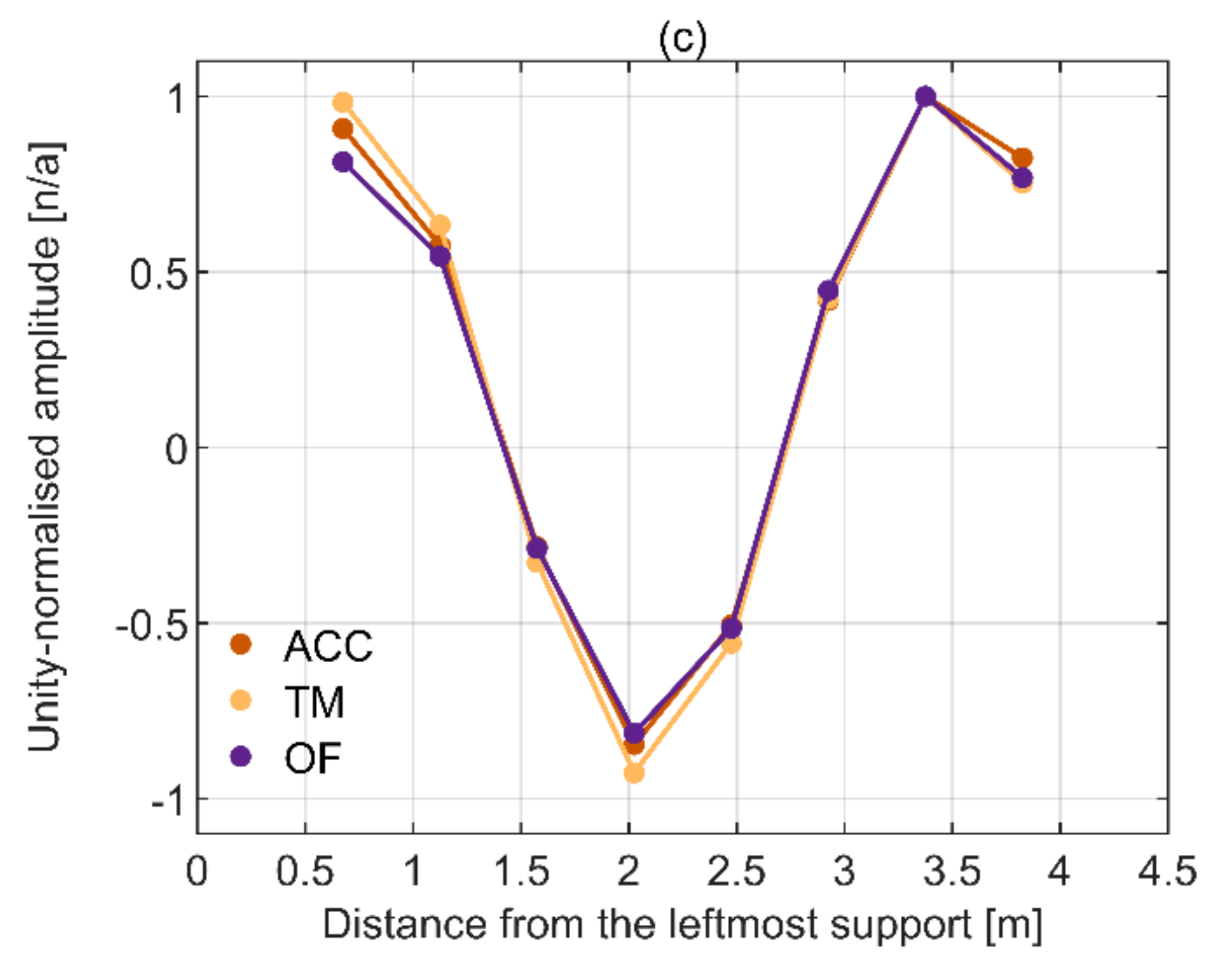
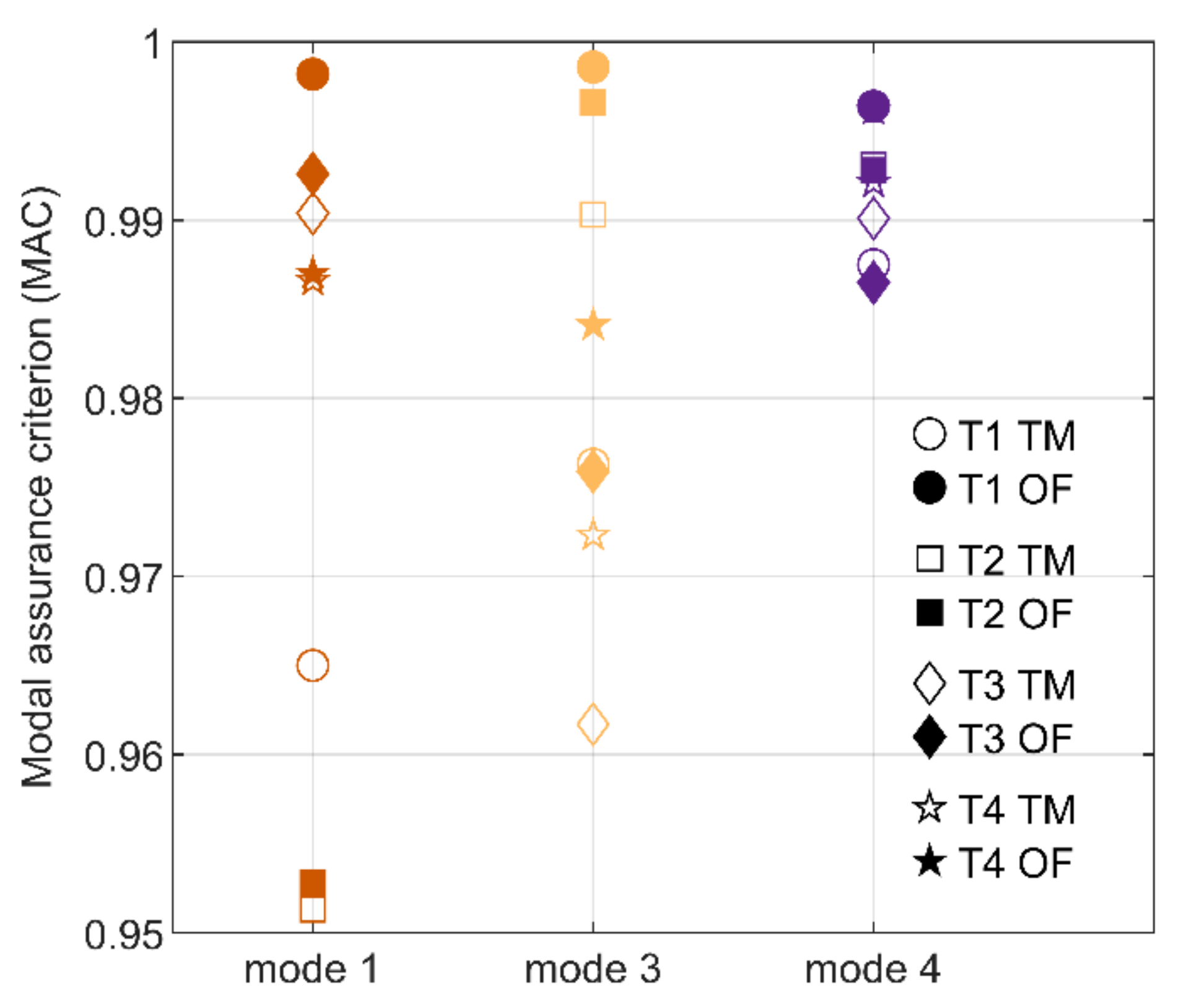
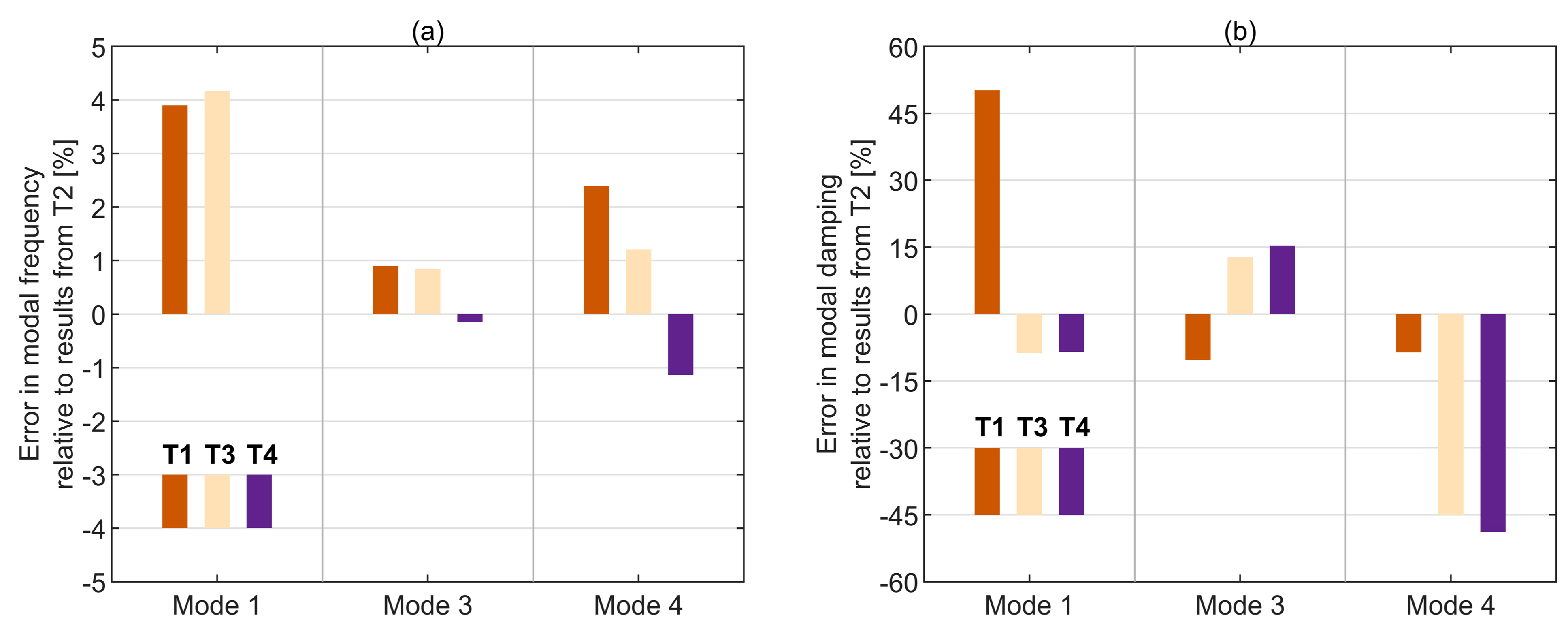
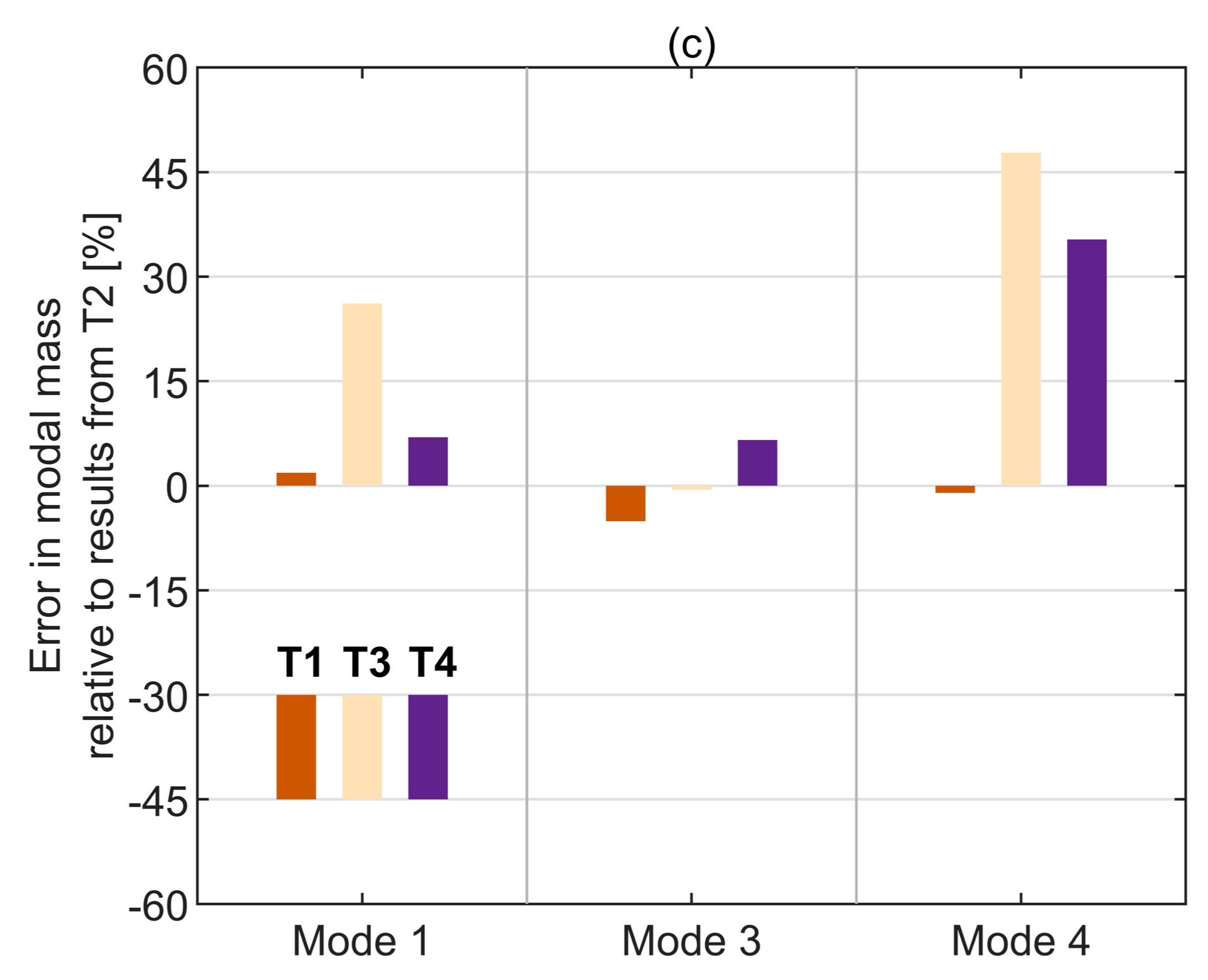
3.2. Modal Parameters
4. Discussion
5. Conclusions
- Optic flow algorithm consistently gives better results than template matching.
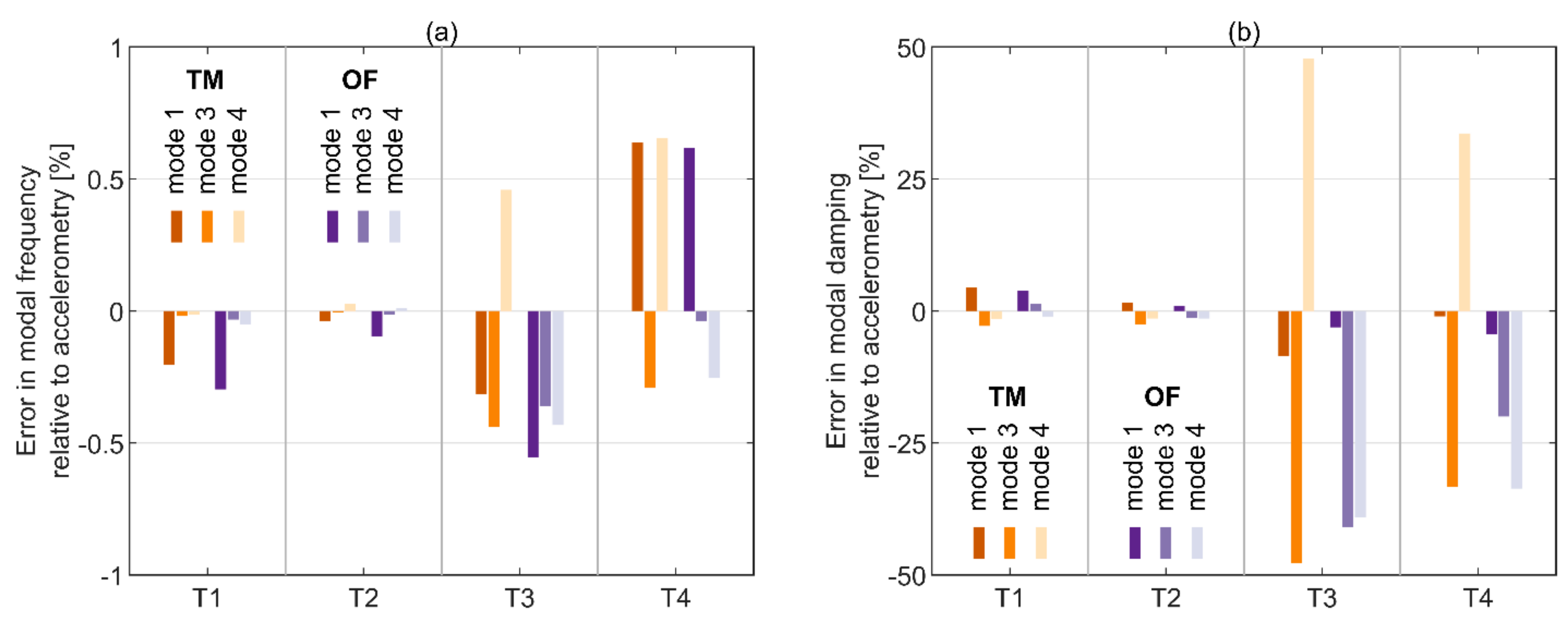
- Relative to the benchmark results obtained with accelerometry, the pseudo random excitation gives superior results to sine chirp excitation regardless of the excitation intensity.
- The error in modal parameters derived from optical MCS relative to accelerometry is within the uncertainty bounds imposed by the excitation type and intensity when considering the identification results from accelerometry only.
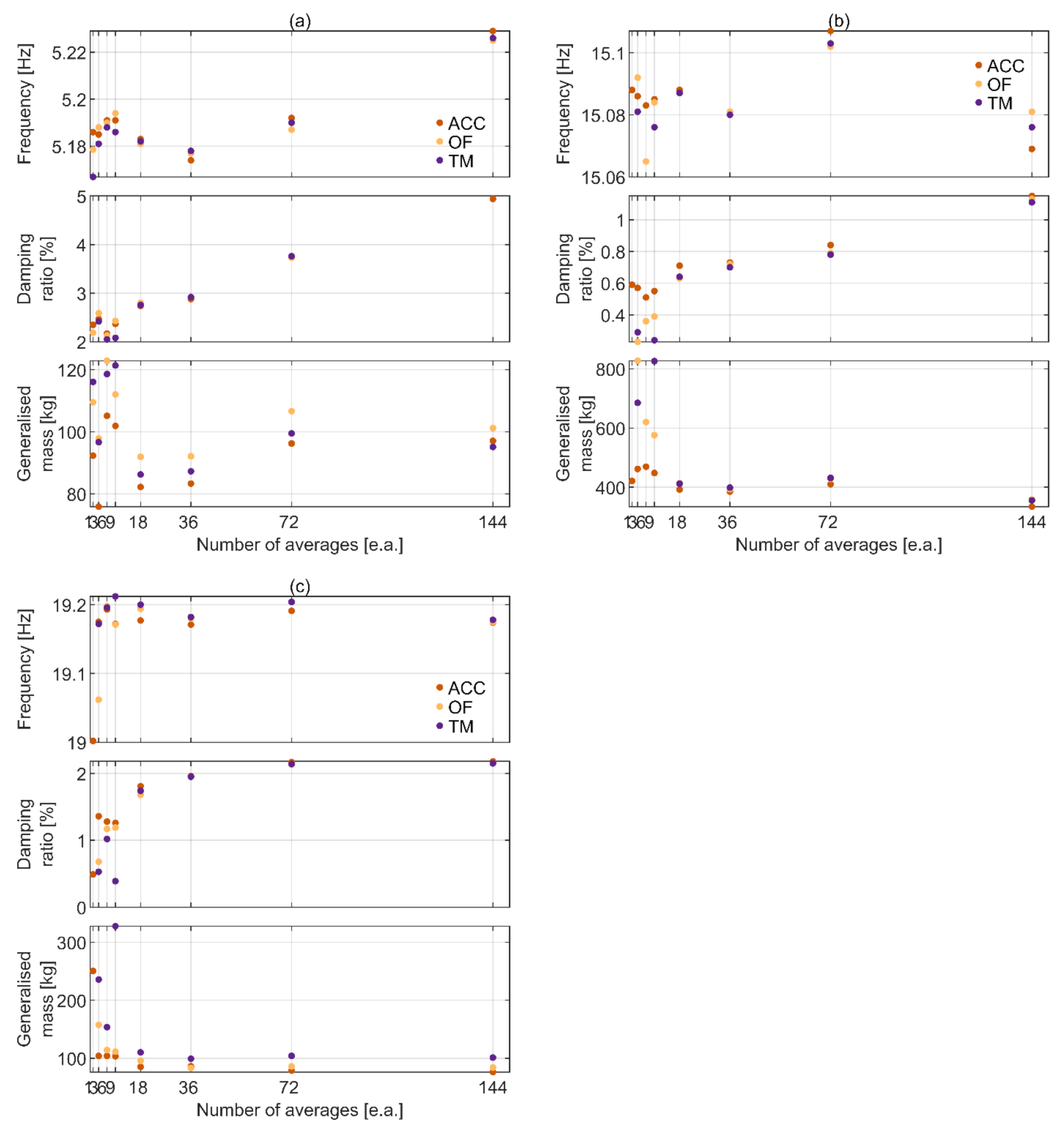
- The necessary processing of images by the motion extraction algorithms unavoidably generates noise, the nature of which appears to be random. To alleviate this effect, the duration of the test should be long enough to be able to average out the noise while preserving sufficient frequency resolution. This also applies in the case of sine chirp excitation, which, in theory, should not require windowing and averaging due to the periodicity of the excitation signal.
- Although in the case of shaker excitation, a H2 estimator is sometimes preferred to define resonances [62] (p. 288), the noise associated with the extraction of motion data from images overwrites this casualty making a H1 estimator more suitable for obtaining FRFs.
- As is often the case in modal analysis, the modal parameters are sensitive to the data processing method, e.g., the length of blocks of data. This is also the case when using optical MCS, and suitable stabilisation diagrams can be used to gain confidence in the reliability of the results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, D.; Feng, M.Q. Computer Vision for Structural Dynamics and Health Monitoring; John Wiley & Sons and ASME Press: Hoboken, NJ, USA, 2020. [Google Scholar]
- Ye, X.W.; Dong, C.Z.; Liu, T. A Review of Machine Vision-Based Structural Health Monitoring: Methodologies and Applications. J. Sens. 2016, 2016, 7103039. [Google Scholar] [CrossRef] [Green Version]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection—A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Spencer, B.F.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222. [Google Scholar] [CrossRef]
- Dong, C.-Z.; Catbas, F.N. A review of computer vision–based structural health monitoring at local and global levels. Struct. Health Monit. 2020, 1475921720935585. [Google Scholar] [CrossRef]
- Zona, A. Vision-based vibration monitoring of structures and infrastructures: An overview of recent applications. Infrastructures 2021, 6, 4. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M.W. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef] [Green Version]
- Lydon, D.; Lydon, M.; Taylor, S.; Del Rincon, J.M.; Hester, D.; Brownjohn, J. Development and field testing of a vision-based displacement system using a low cost wireless action camera. Mech. Syst. Signal Process. 2019, 121, 343–358. [Google Scholar] [CrossRef] [Green Version]
- Brownjohn, J.M.W.; Hester, D.; Xu, Y.; Bassitt, J.; Koo, K. Viability of optical tracking systems for monitoring deformations of a long span bridge. In Proceedings of the 6th European Conference on structural Control, Sheffield, UK, 11–13 July 2016; pp. 11–13. [Google Scholar] [CrossRef]
- Zhao, X.; Ri, K.; Wang, N. Experimental Verification for Cable Force Estimation Using Handheld Shooting of Smartphones. J. Sens. 2017, 5625396. [Google Scholar] [CrossRef] [Green Version]
- Khuc, T.; Catbas, F.N. Completely contactless structural health monitoring of real-life structures using cameras and computer vision. Struct. Control Health Monit. 2017, 24, e1852. [Google Scholar] [CrossRef]
- Dong, C.Z.; Bas, S.; Catbas, F.N. Investigation of vibration serviceability of a footbridge using computer vision-based methods. Eng. Struct. 2020, 224, 111224. [Google Scholar] [CrossRef]
- Luo, L.; Feng, M.Q.; Wu, Z.Y. Robust vision sensor for multi-point displacement monitoring of bridges in the field. Eng. Struct. 2018, 163, 255–266. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.; Kong, D. A non-contact vision-based system for multipoint displacement monitoring in a cable-stayed footbridge. Struct. Control Health Monit. 2018, 25, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Kromanis, R.; Xu, Y.; Lydon, D.; Martinez del Rincon, J.; Al-Habaibeh, A. Measuring structural deformations in the laboratory environment using smartphones. Front. Built Environ. 2019, 5, 44. [Google Scholar] [CrossRef] [Green Version]
- Kohut, P.; Holak, K.; Uhl, T.; Ortyl, Ł.; Owerko, T.; Kuras, P.; Kocierz, R. Monitoring of a civil structure’s state based on noncontact measurements. Struct. Health Monit. 2013, 12, 411–429. [Google Scholar] [CrossRef]
- Yang, Y.; Dorn, C.; Mancini, T.; Talken, Z.; Kenyon, G.; Farrar, C.; Mascareñas, D. Blind identification of full-field vibration modes from video measurements with phase-based video motion magnification. Mech. Syst. Signal Process. 2017, 85, 567–590. [Google Scholar] [CrossRef]
- Park, S.W.; Park, H.S.; Kim, J.H.; Adeli, H. 3D displacement measurement model for health monitoring of structures using a motion capture system. Meas. J. Int. Meas. Confed. 2015, 59, 352–362. [Google Scholar] [CrossRef]
- Park, H.S.; Young Kim, J.; Gi Kim, J.; Woon Choi, S.; Kim, Y. A new position measurement system using a motion-capture camera for wind tunnel tests. Sensors 2013, 13, 12329–12344. [Google Scholar] [CrossRef] [Green Version]
- Oh, B.K.; Hwang, J.W.; Kim, Y.; Cho, T.; Park, H.S. Vision-based system identification technique for building structures using a motion capture system. J. Sound Vib. 2015, 356, 72–85. [Google Scholar] [CrossRef]
- Dong, C.Z.; Celik, O.; Catbas, F.N. Marker-free monitoring of the grandstand structures and modal identification using computer vision methods. Struct. Health Monit. 2019, 18, 1491–1509. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.W.; Yoon, H.; Spencer, B.F. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 1–14. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N.; Kersten, J.; Taraben, J.; Debus, P.; Helmrich, M.; Rodehorst, V. Framework for automated UAS-based structural condition assessment of bridges. Autom. Constr. 2019, 97, 77–95. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Vision-based multipoint displacement measurement for structural health monitoring. Struct. Control Health Monit. 2016. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Experimental validation of cost-effective vision-based structural health monitoring. Mech. Syst. Signal Process. 2017, 88, 199–211. [Google Scholar] [CrossRef]
- Jamali, S.; Chan, T.H.T.; Nguyen, A.; Thambiratnam, D.P. Reliability-based load-carrying capacity assessment of bridges using structural health monitoring and nonlinear analysis. Struct. Health Monit. 2019, 18, 20–34. [Google Scholar] [CrossRef] [Green Version]
- Celik, O.; Dong, C.-Z.; Catbas, F.N. Computer Vision–Based Human Comfort Assessment of Stadiums. J. Perform. Constr. Facil. 2020, 34, 04020005. [Google Scholar] [CrossRef]
- Cha, Y.J.; Chen, J.G.; Büyüköztürk, O. Output-only computer vision based damage detection using phase-based optical flow and unscented Kalman filters. Eng. Struct. 2017, 132, 300–313. [Google Scholar] [CrossRef]
- Celik, O.; Dong, C.; Catbas, F.N. A computer vision approach for the load time history estimation of lively individuals and crowds. Comput. Struct. 2018, 200, 32–52. [Google Scholar] [CrossRef]
- Dan, D.; Ge, L.; Yan, X. Identification of moving loads based on the information fusion of weigh-in-motion system and multiple camera machine vision. Measurement 2019, 144, 155–166. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Yu, S. Rapid Impact Testing and System Identification of Footbridges Using Particle Image Velocimetry. Comput. Civ. Infrastruct. Eng. 2019, 34, 130–145. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Yu, S. Vision-based structural scaling factor and flexibility identification through mobile impact testing. Mech. Syst. Signal Process. 2019, 122, 387–402. [Google Scholar] [CrossRef]
- Wang, Y.; Brownjohn, J.; Dai, K.; Patel, M. An Estimation of Pedestrian Action on Footbridges Using Computer Vision Approaches. Front. Built Environ. 2019, 5, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Brownjohn, J.M.W.; Huseynov, F. Accurate Deformation Monitoring on Bridge Structures Using a Cost-Effective Sensing System Combined with a Camera and Accelerometers: Case Study. J. Bridg. Eng. 2019, 24, 05018014. [Google Scholar] [CrossRef] [Green Version]
- Ozer, E.; Feng, D.; Feng, M.Q. Hybrid motion sensing and experimental modal analysis using collocated smartphone camera and accelerometers. Meas. Sci. Technol. 2017, 28, 105903. [Google Scholar] [CrossRef]
- Javh, J.; Slavič, J.; Boltežar, M. High frequency modal identification on noisy high-speed camera data. Mech. Syst. Signal Process. 2018, 98, 344–351. [Google Scholar] [CrossRef]
- Javh, J.; Slavič, J.; Boltežar, M. Experimental modal analysis on full-field DSLR camera footage using spectral optical flow imaging. J. Sound Vib. 2018, 434, 213–220. [Google Scholar] [CrossRef]
- Orlowitz, E.; Brandt, A. Comparison of experimental and operational modal analysis on a laboratory test plate. Measurement 2017, 102, 121–130. [Google Scholar] [CrossRef]
- Brincker, R.; Ventura, C.E. Introduction to Operational Modal Analysis; John Wiley & Sons: Chichester, UK, 2015; ISBN 9781118535141. [Google Scholar]
- Brandt, A.; Berardengo, M.; Manzoni, S.; Cigada, A. Scaling of mode shapes from operational modal analysis using harmonic forces. J. Sound Vib. 2017, 407, 128–143. [Google Scholar] [CrossRef]
- Aenlle, M.; Juul, M.; Brincker, R. Modal Mass and Length of Mode Shapes in Structural Dynamics. Shock Vib. 2020, 2020. [Google Scholar] [CrossRef]
- Scruton, C. Wind-excited oscillations of tall stacks. Engineering 1955, 199, 806–808. [Google Scholar]
- McRobie, A.; Morgenthal, G. Risk Management for Pedestrian-Induced Dynamics of Footbridges. In Proceedings of the Footbridge 2002—First International Conference, Paris, France, 20–22 November 2002; pp. 1–10. [Google Scholar]
- Bocian, M.; Macdonald, J.H.G.; Burn, J.F. Probabilistic criteria for lateral dynamic stability of bridges under crowd loading. Comput. Struct. 2014, 136, 108–119. [Google Scholar] [CrossRef]
- Kalybek, M.; Bocian, M.; Nikitas, N. Performance of optical structural vibration monitoring systems in experimental modal analysis. Sensors 2021, 21, 1239. [Google Scholar] [CrossRef] [PubMed]
- Brandt, A. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures; John Wiley and Sons: Hoboken, NJ, USA, 2011; ISBN 9780470746448. [Google Scholar]
- Cao, M.S.; Sha, G.G.; Gao, Y.F.; Ostachowicz, W. Structural damage identification using damping: A compendium of uses and features. Smart Mater. Struct. 2017, 26, 043001. [Google Scholar] [CrossRef]
- Balmes, E. GARTEUR group on ground vibration testing. Results from the test of a single structure by 12 laboratories in Europe. Proc. Int. Modal Anal. Conf. IMAC 1997, 2, 1346–1352. [Google Scholar]
- Reu, P.L.; Rohe, D.P.; Jacobs, L.D. Comparison of DIC and LDV for practical vibration and modal measurements. Mech. Syst. Signal Process. 2017, 86, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.Z.; Bas, S.; Necati Catbas, F. A completely non-contact recognition system for bridge unit influence line using portable cameras and computer vision. Smart Struct. Syst. 2019, 24, 617–630. [Google Scholar] [CrossRef]
- Pakos, W.; Wójcicki, Z.; Grosel, J.; Majcher, K.; Sawicki, W. Experimental research of cable tension tuning of a scaled model of cable stayed bridge. Arch. Civ. Mech. Eng. 2016, 16, 41–52. [Google Scholar] [CrossRef]
- Avitabile, P. Modal Testing: A Practitioner’s Guide; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Evangelidis, G.D.; Psarakis, E.Z. Parametric image alignment using enhanced correlation coefficient maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1858–1865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition;IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. Int. Jt. Conf. Artif. Intell. 1981, 2, 674–679. [Google Scholar]
- MATLAB. Available online: https://uk.mathworks.com/products/matlab.html (accessed on 31 August 2021).
- Ewins, D.J. Modal Testing: Theory, Practice and Application; Research Studies Press Ltd.: Baldock, Hertfordshire, UK, 2000. [Google Scholar]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 4th ed.; John Wiley & Sons: New York, NY, USA, 2012; ISBN 9781118032428. [Google Scholar]
- Hester, D.; Koo, K.; Xu, Y.; Brownjohn, J.; Bocian, M. Boundary condition focused finite element model updating for bridges. Eng. Struct. 2019, 198, 109514. [Google Scholar] [CrossRef]
- Poozesh, P.; Sabato, A.; Sarrafi, A.; Niezrecki, C.; Avitabile, P.; Yarala, R. Multicamera measurement system to evaluate the dynamic response of utility-scale wind turbine blades. Wind Energy 2020, 23, 1619–1639. [Google Scholar] [CrossRef]
- Warren, C.; Niezrecki, C.; Avitabile, P.; Pingle, P. Comparison of FRF measurements and mode shapes determined using optically image based, laser, and accelerometer measurements. Mech. Syst. Signal Process. 2011, 25, 2191–2202. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test ID | Excitation Type | Rate [Hz/s] | Intensity [RMS *, N] | Approximate Test Duration [s] | Frequency Range [Hz] |
|---|---|---|---|---|---|
| T1 | pseudo-random | n/a | 13.35 | 600 | 3–25 |
| T2 | pseudo-random | n/a | 28.95 | 600 | 3–25 |
| T3 | sine chirp | 0.037 | 9.69 | 600 | 3–25 |
| T4 | sine chirp | 0.037 | 19.8 | 600 | 3–25 |
| System | Sensor | Quantity | Operational Frequency and Resolution/Range/Sensitivity |
|---|---|---|---|
| Accelerometry | Brüel & Kjær miniature DeltaTron® 4507 B005 | 10 | 0.4 Hz–6 kHz 150 µg & 100 mV/(m·s−2) |
| Vibration exciter | Brüel & Kjær Type 4808 | 1 | 5 Hz–10 kHz * 112 N |
| Force transducer | Brüel & Kjær DeltaTron® 8230-003 | 1 | 22000 N (compression) & 2200 N (tension) 0.22 mV/N |
| Data acquisition system | Brüel & Kjær PULSE | 1 | 4096 Hz 24 bit |
| Consumer-grade camera (CGC) | Canon EOS 200D with DIGIC 7 processor and 20 mm Canon lens with maximum aperture f/2.8 | 1 | 59.94 fps 24.2 MP |
| Frequency (Hz) | Damping Ratio (%) | Generalised Mass (kg) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Test | Mode | Accelerometry | TM | OF | Accelerometry | TM | OF | Accelerometry | TM | OF |
| T1 | 1 | 5.384 | 5.373 (−0.2) | 5.368 (−0.3) | 4.79 | 5.00 (4.38) | 4.97 (3.76) | 89.5 | 83.7 (−6.45) | 84.1 (−6.01) |
| T1 | 3 | 15.218 | 15.215 (−0.02) | 15.213 (−0.03) | 0.70 | 0.68 (−2.86) | 0.71 (1.43) | 353.0 | 418.9 (18.67) | 463.3 (31.24) |
| T1 | 4 | 19.637 | 19.634 (−0.02) | 19.627 (−0.05) | 1.91 | 1.88 (−1.57) | 1.89 (−1.05) | 79.8 | 111.7 (39.91) | 127.9 (60.24) |
| T2 | 1 | 5.182 | 5.180 (−0.04) | 5.177 (−0.1) | 3.19 | 3.24 (1.57) | 3.22 (0.94) | 87.8 | 92.4 (5.2) | 98.3 (11.85) |
| T2 | 3 | 15.082 | 15.081 (−0.01) | 15.08 (−0.01) | 0.78 | 0.76 (−2.56) | 0.77 (−1.28) | 371.9 | 387.3 (4.14) | 383.3 (3.06) |
| T2 | 4 | 19.178 | 19.183 (0.03) | 19.18 (0.01) | 2.09 | 2.06 (−1.44) | 2.06 (−1.44) | 80.7 | 101.6 (25.97) | 84.13 (4.3) |
| T3 | 1 | 5.398 | 5.381 (−0.31) | 5.368 (−0.56) | 2.91 | 2.66 (−8.59) | 2.82 (−3.09) | 110.8 | 112.5 (1.51) | 103.8 (−6.34) |
| T3 | 3 | 15.210 | 15.143 (−0.44) | 15.155 (−0.36) | 0.88 | 0.46 (−47.73) | 0.52 (−40.91) | 369.7 | 640.5 (73.22) | 426.5 (15.35) |
| T3 | 4 | 19.410 | 19.499 (0.46) | 19.326 (0.43) | 1.15 | 1.70 (47.83) | 0.70 (−39.13) | 119.2 | 104.5 (−12.36) | 171.9 (44.2) |
| T4 | 1 | 5.182 | 5.215 (0.64) | 5.214 (0.62) | 2.92 | 2.89 (−1.03) | 2.79 (−4.45) | 94.0 | 90.9 (−3.21) | 96.2 (2.4) |
| T4 | 3 | 15.059 | 15.015 (−0.29) | 15.053 (−0.04) | 0.90 | 0.60 (−33.33) | 0.72 (−20) | 396.3 | 466.2 (17.63) | 469.6 (18.47) |
| T4 | 4 | 18.960 | 19.084 (0.65) | 18.912 (−0.25) | 1.07 | 1.43 (33.64) | 0.71 (−33.64) | 109.2 | 134.0 (22.71) | 182.2 (66.85) |
| Test | Optical MCS | Mode 1 | Mode 3 | Mode 4 |
|---|---|---|---|---|
| T1 | Template matching (TM) | 0.9650 | 0.9763 | 0.9875 |
| T1 | Optic flow (OF) | 0.9982 | 0.9986 | 0.9964 |
| T2 | Template matching (TM) | 0.9513 | 0.9903 | 0.9931 |
| T2 | Optic flow (OF) | 0.9528 | 0.9966 | 0.9928 |
| T3 | Template matching (TM) | 0.9904 | 0.9617 | 0.9901 |
| T3 | Optic flow (OF) | 0.9926 | 0.9759 | 0.9865 |
| T4 | Template matching (TM) | 0.9866 | 0.9723 | 0.9921 |
| T4 | Optic flow (OF) | 0.9870 | 0.9841 | 0.9962 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalybek, M.; Bocian, M.; Pakos, W.; Grosel, J.; Nikitas, N. Performance of Camera-Based Vibration Monitoring Systems in Input-Output Modal Identification Using Shaker Excitation. Remote Sens. 2021, 13, 3471. https://doi.org/10.3390/rs13173471
Kalybek M, Bocian M, Pakos W, Grosel J, Nikitas N. Performance of Camera-Based Vibration Monitoring Systems in Input-Output Modal Identification Using Shaker Excitation. Remote Sensing. 2021; 13(17):3471. https://doi.org/10.3390/rs13173471
Chicago/Turabian StyleKalybek, Maksat, Mateusz Bocian, Wojciech Pakos, Jacek Grosel, and Nikolaos Nikitas. 2021. "Performance of Camera-Based Vibration Monitoring Systems in Input-Output Modal Identification Using Shaker Excitation" Remote Sensing 13, no. 17: 3471. https://doi.org/10.3390/rs13173471
APA StyleKalybek, M., Bocian, M., Pakos, W., Grosel, J., & Nikitas, N. (2021). Performance of Camera-Based Vibration Monitoring Systems in Input-Output Modal Identification Using Shaker Excitation. Remote Sensing, 13(17), 3471. https://doi.org/10.3390/rs13173471