
Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms

 ,
,  ,
, 
Abstract
:
1. Introduction
2. Materials and Methods
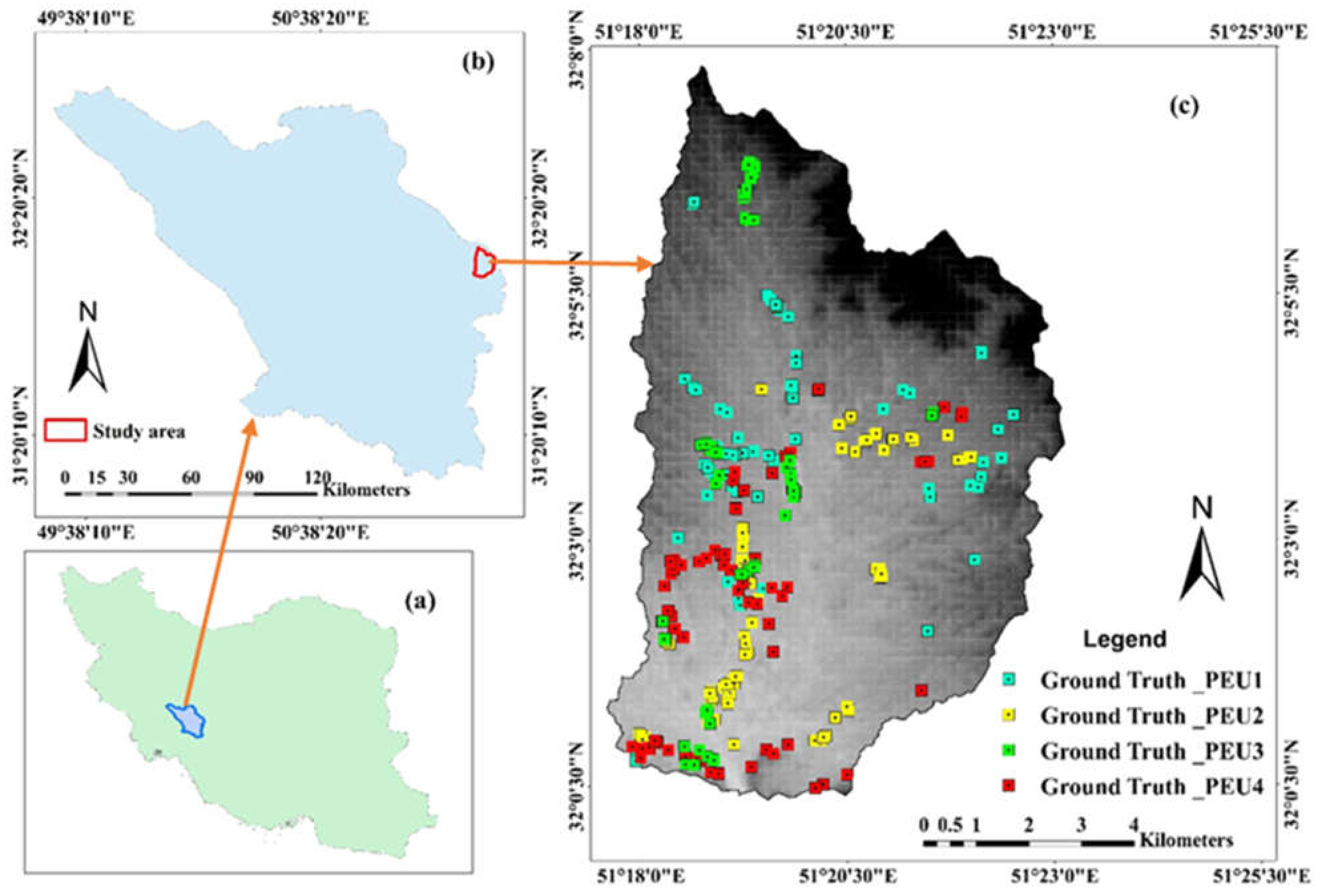
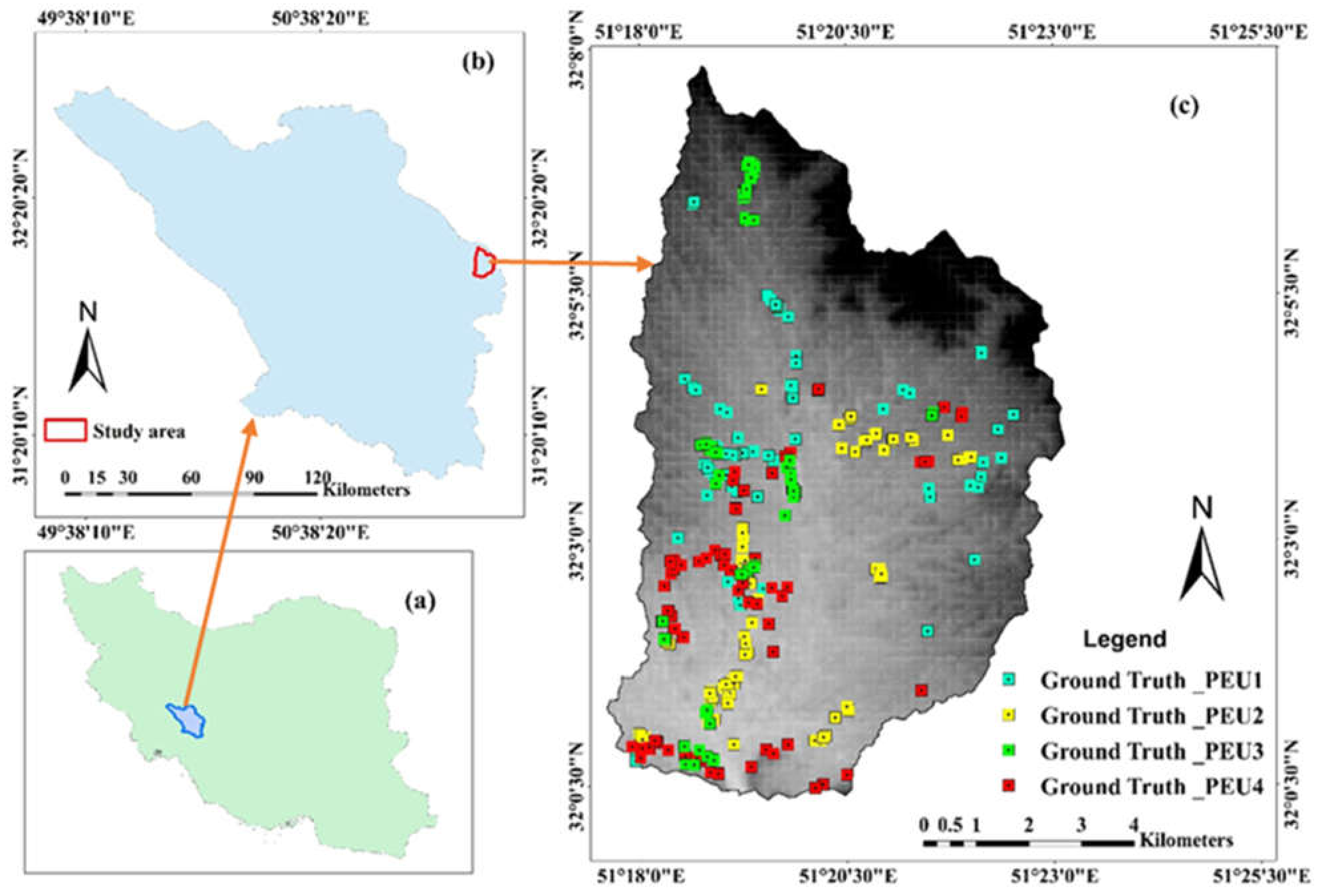
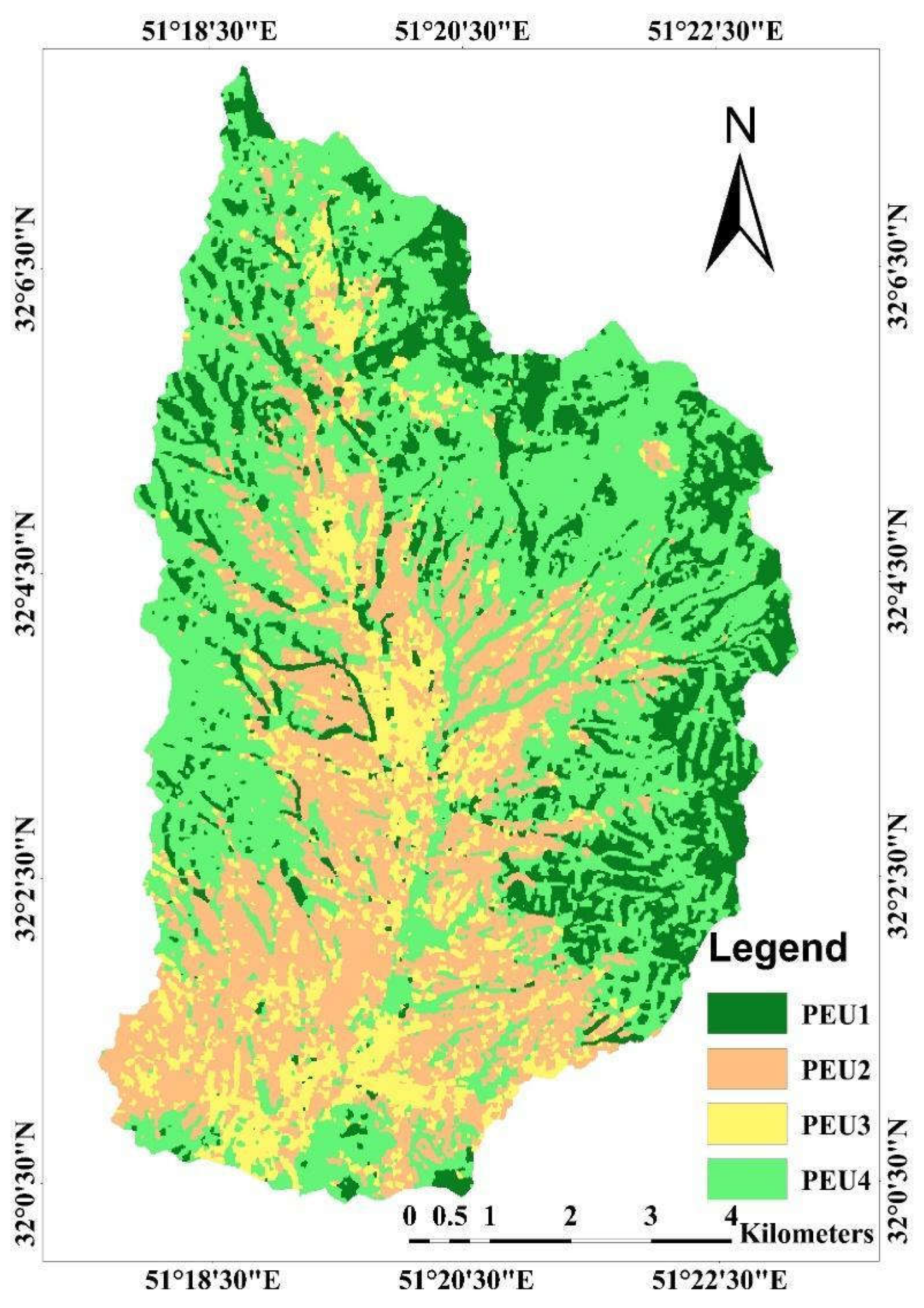
2.1. Study Area
2.2. Field Measurements of PEU
2.3. Remotely Sensed Data
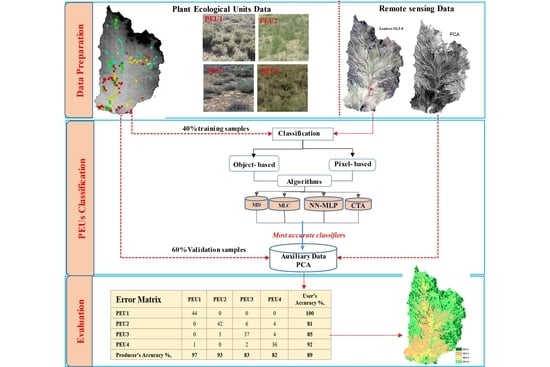
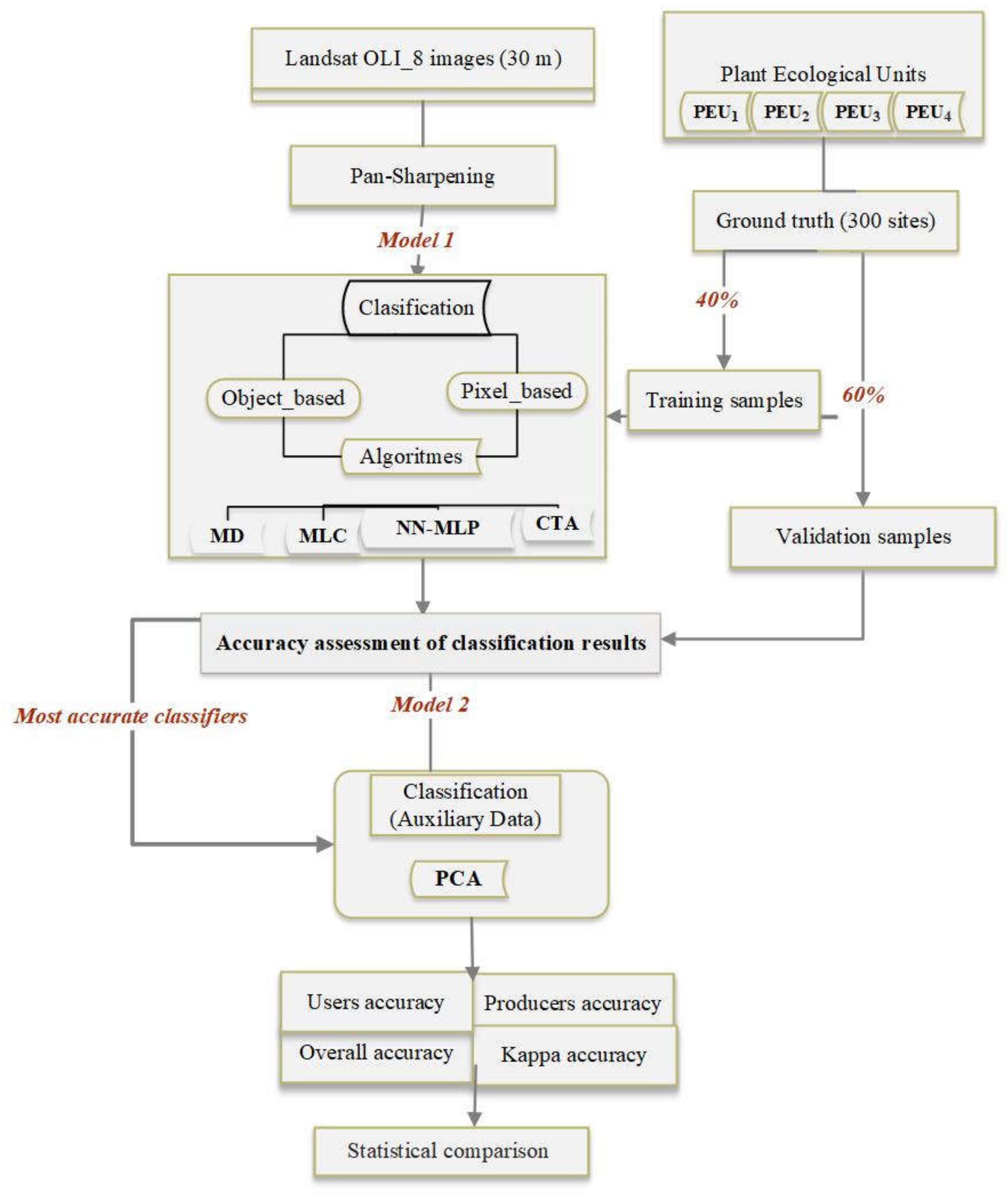
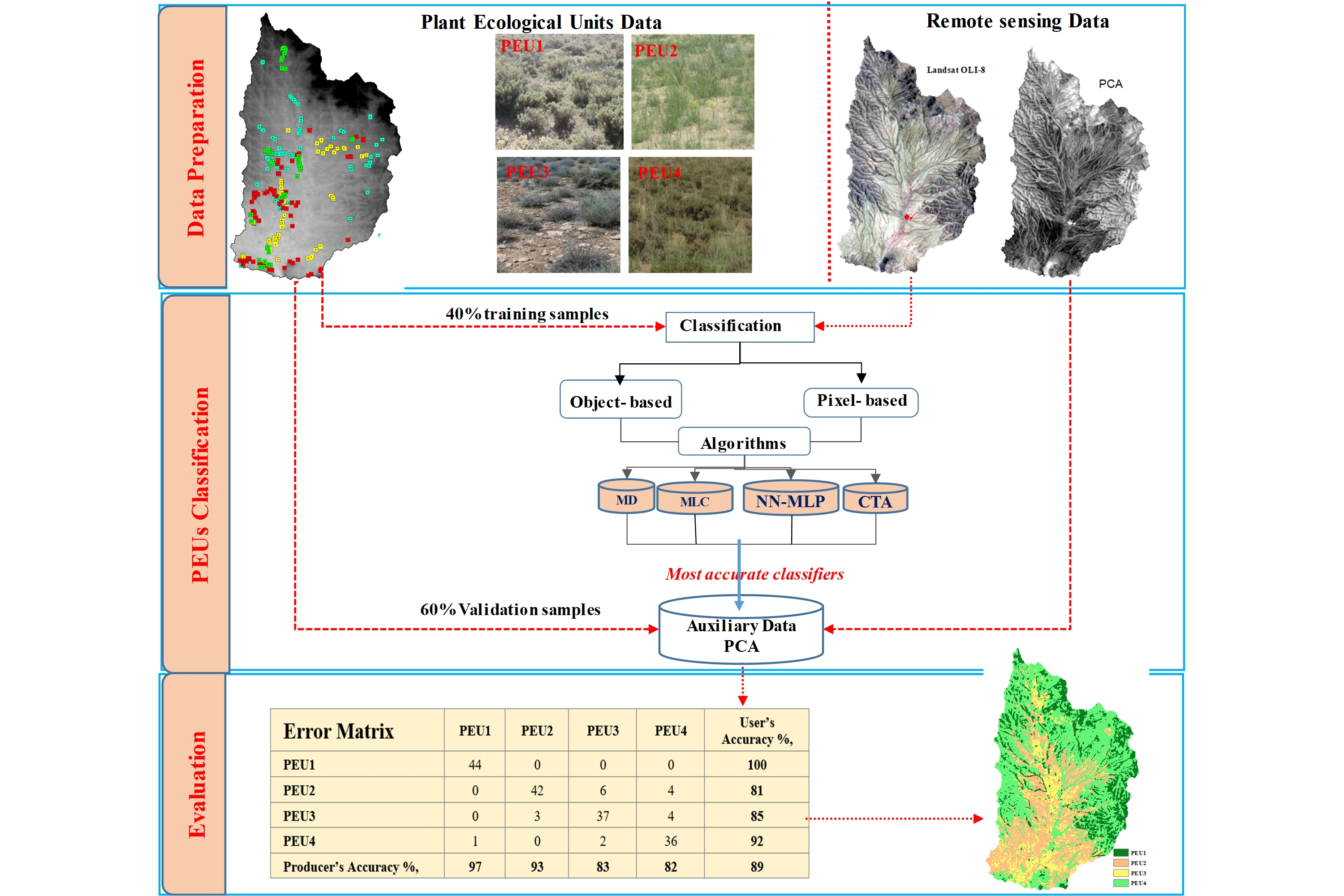
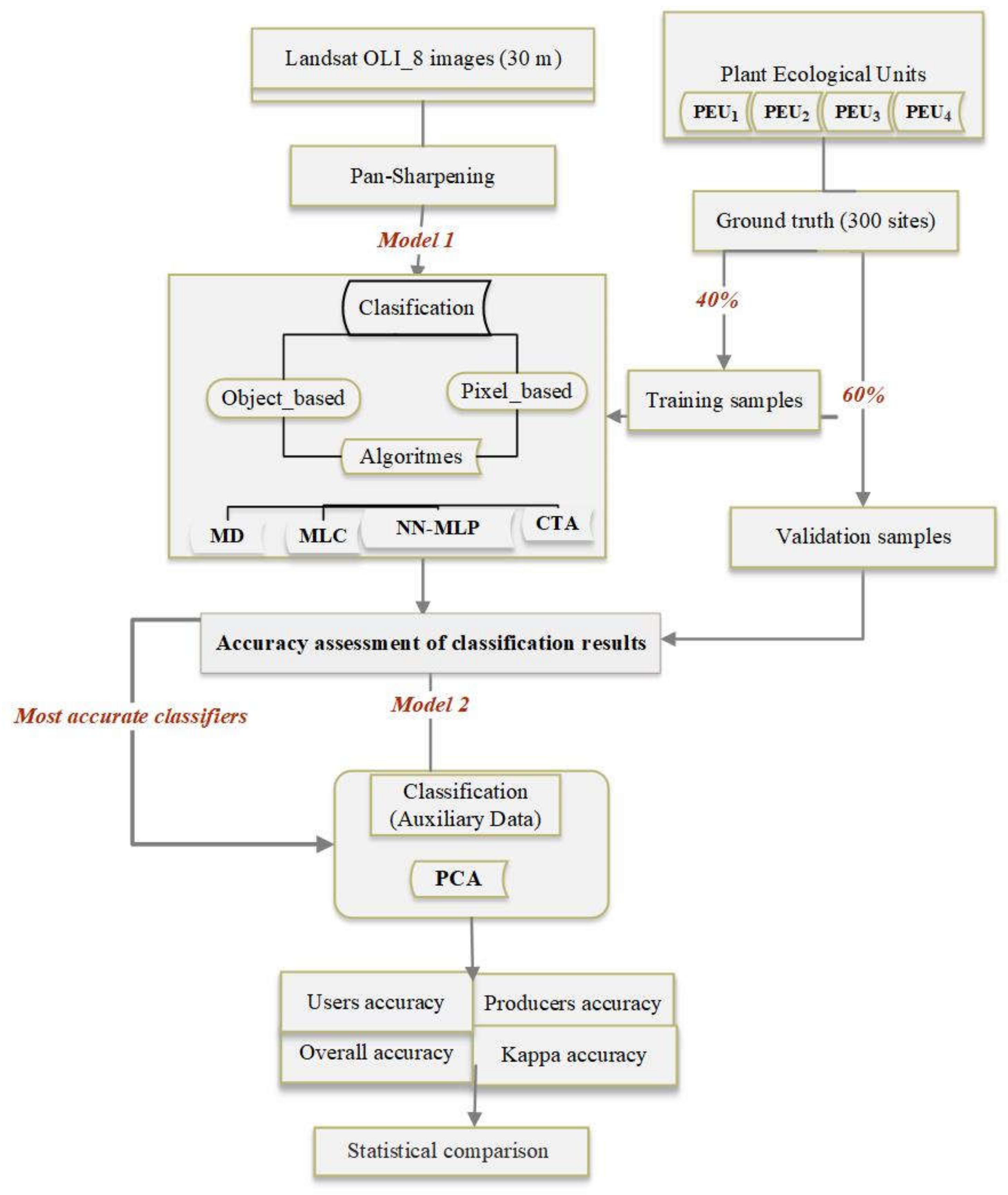
2.4. Methodology
2.4.1. Multispectral Image’s Pan Sharpening
2.4.2. Sampling PEUs and Classification System
2.4.3. PEUs Classification Using Different Classification Algorithms
2.4.4. Segmentation
2.4.5. Auxiliary Data and Prediction Assessment
2.4.6. Statistical Comparison of Classification Algorithms
3. Results
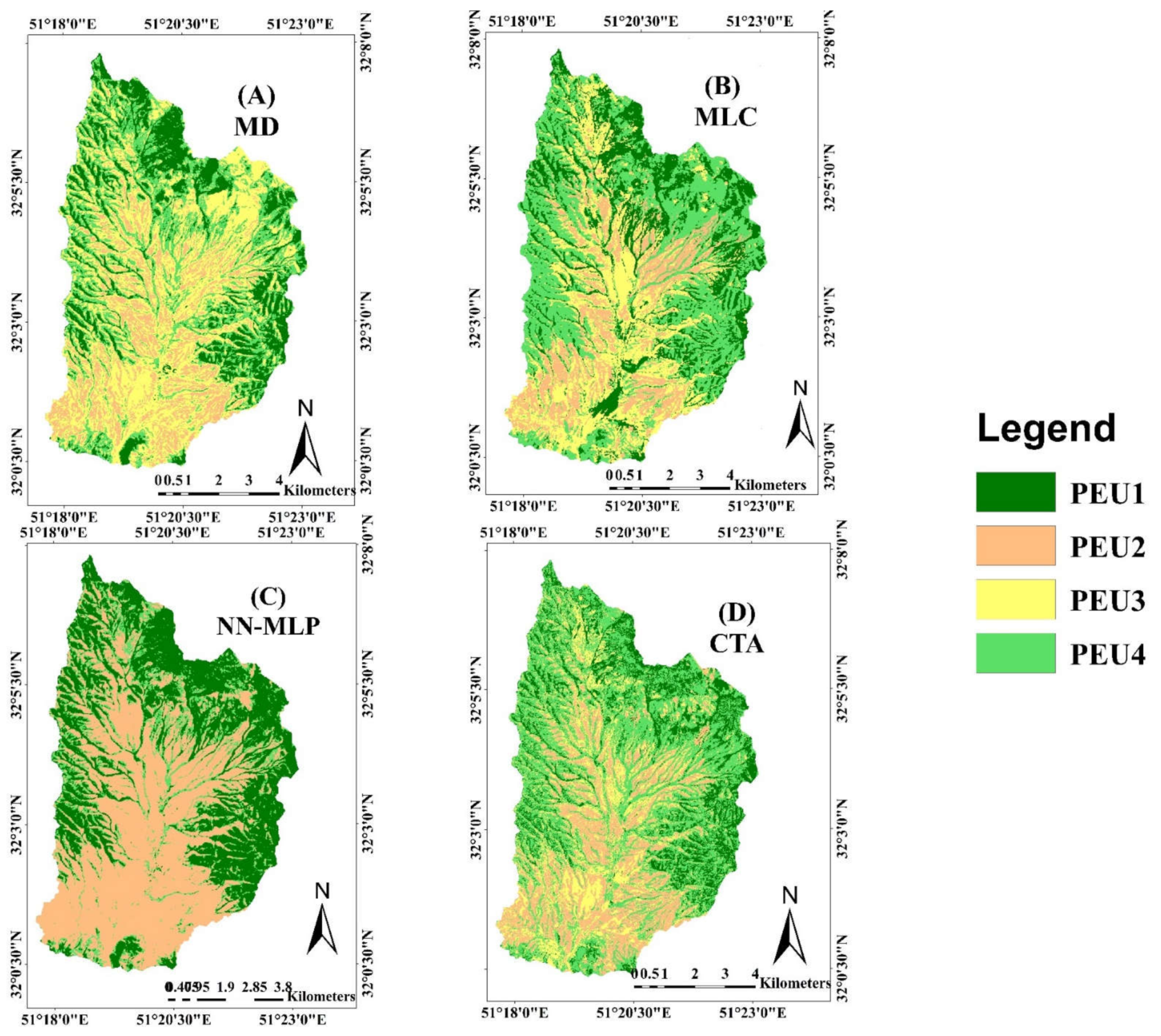
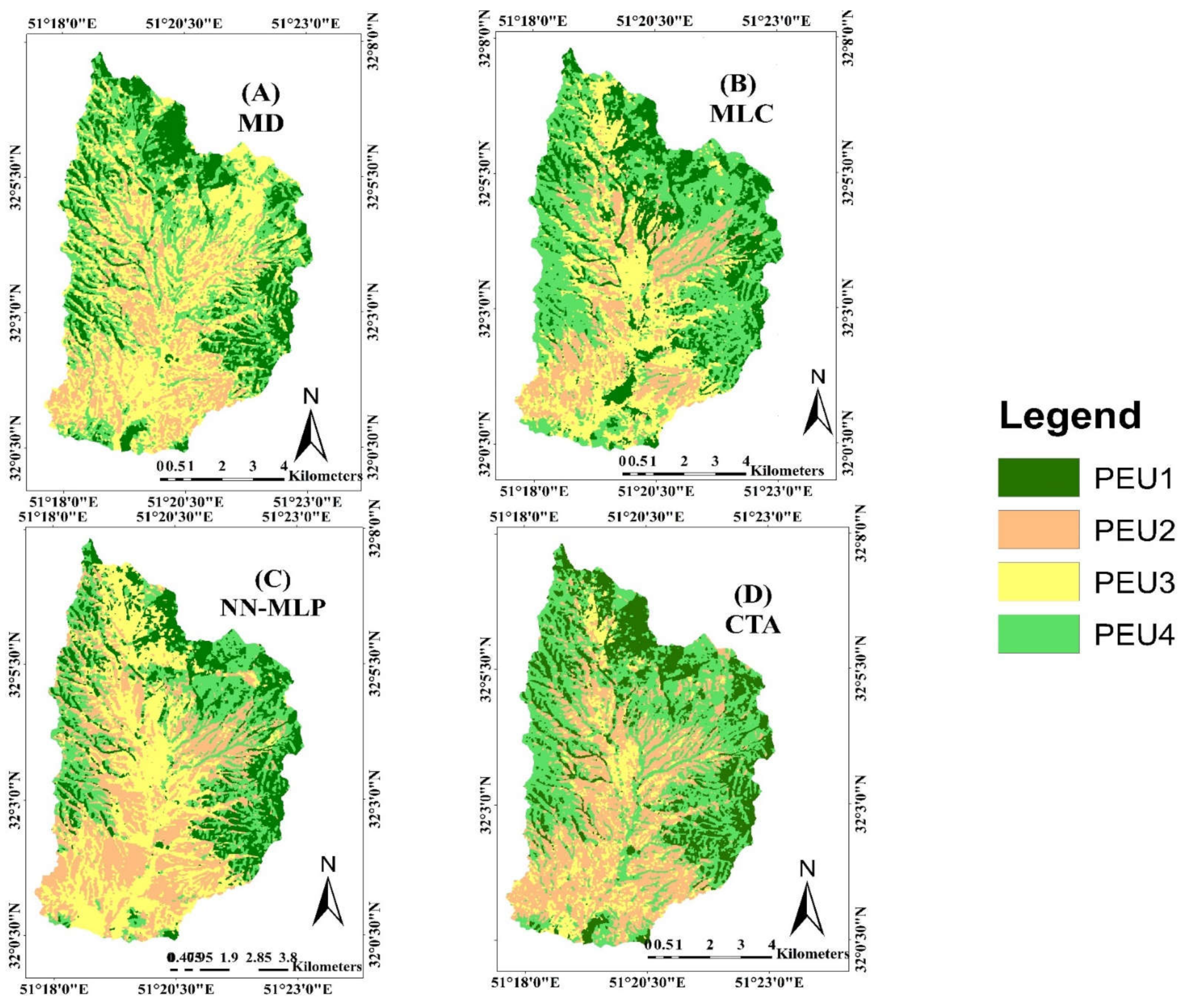
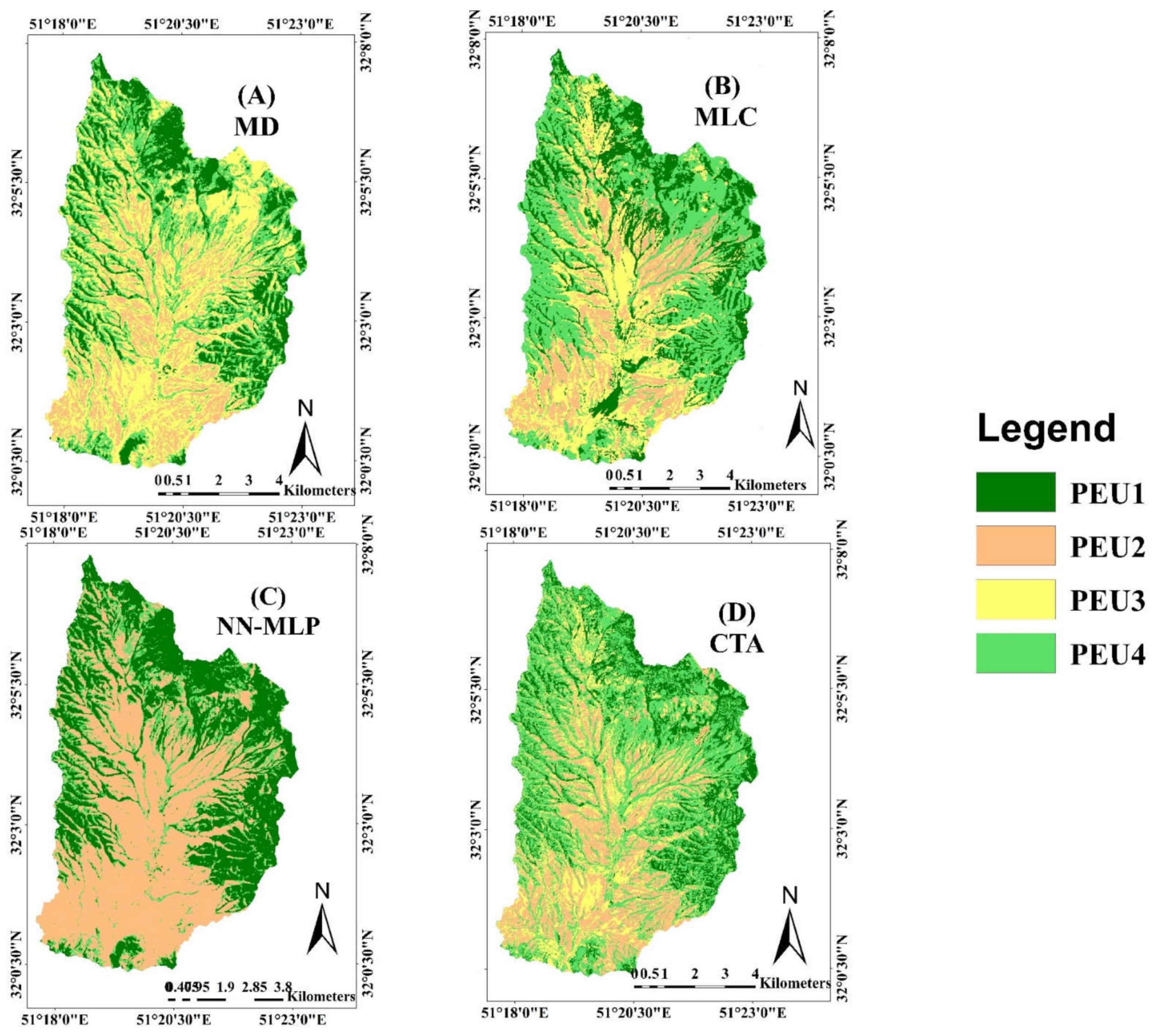
3.1. Pixel-Based Classification
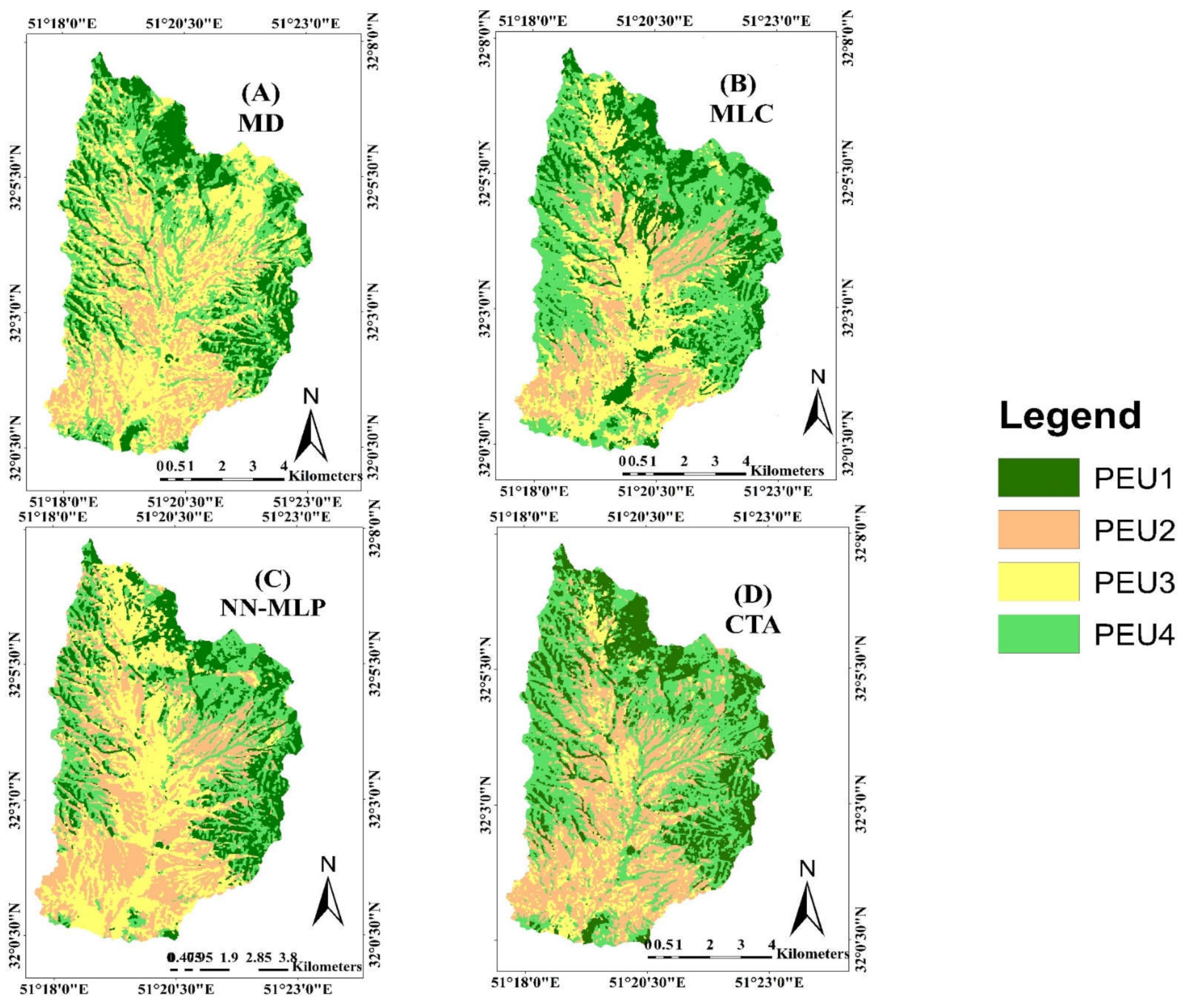
3.2. Object-Based Classification
3.3. Comparing Supervised Classification Methods
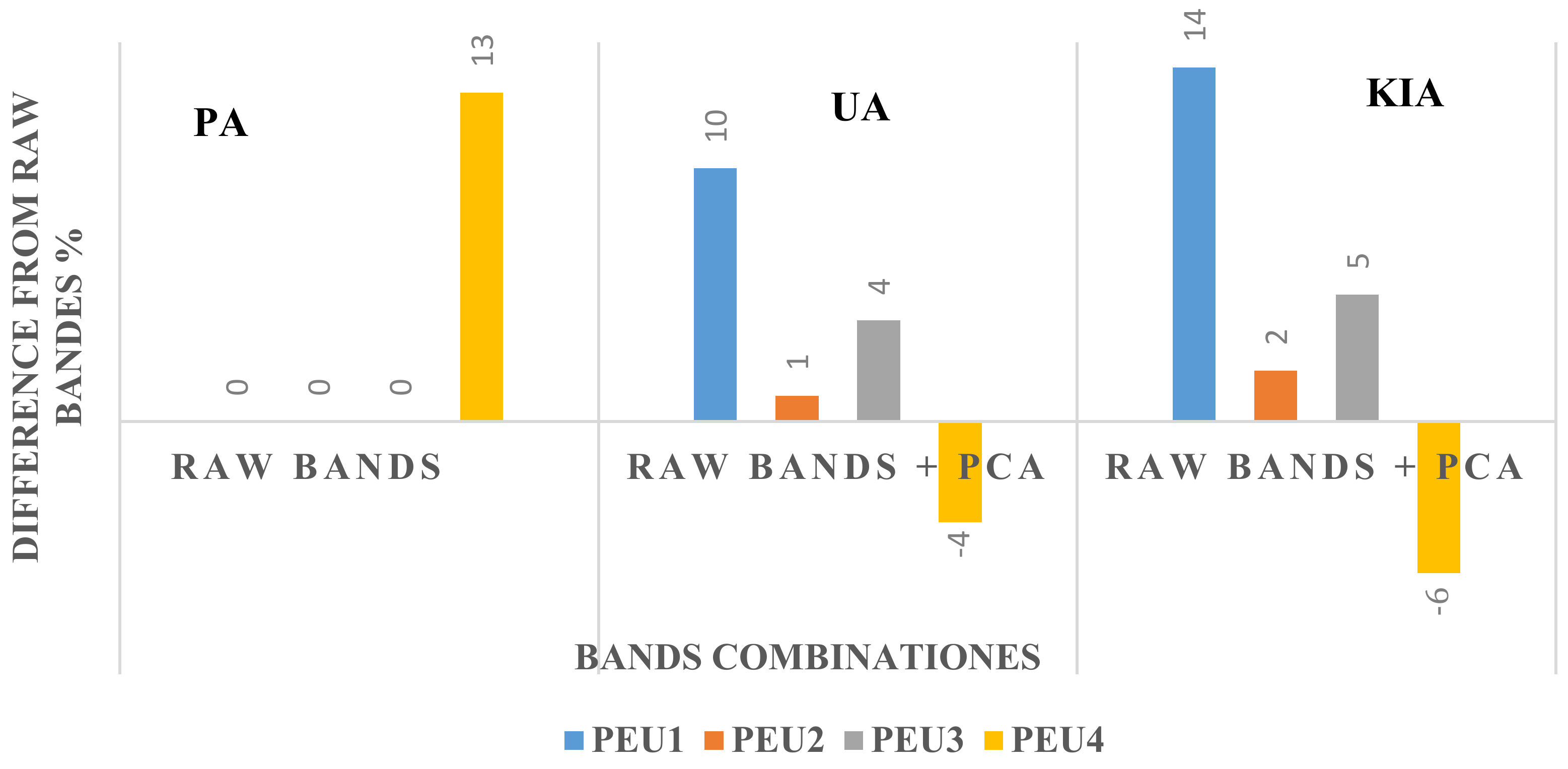
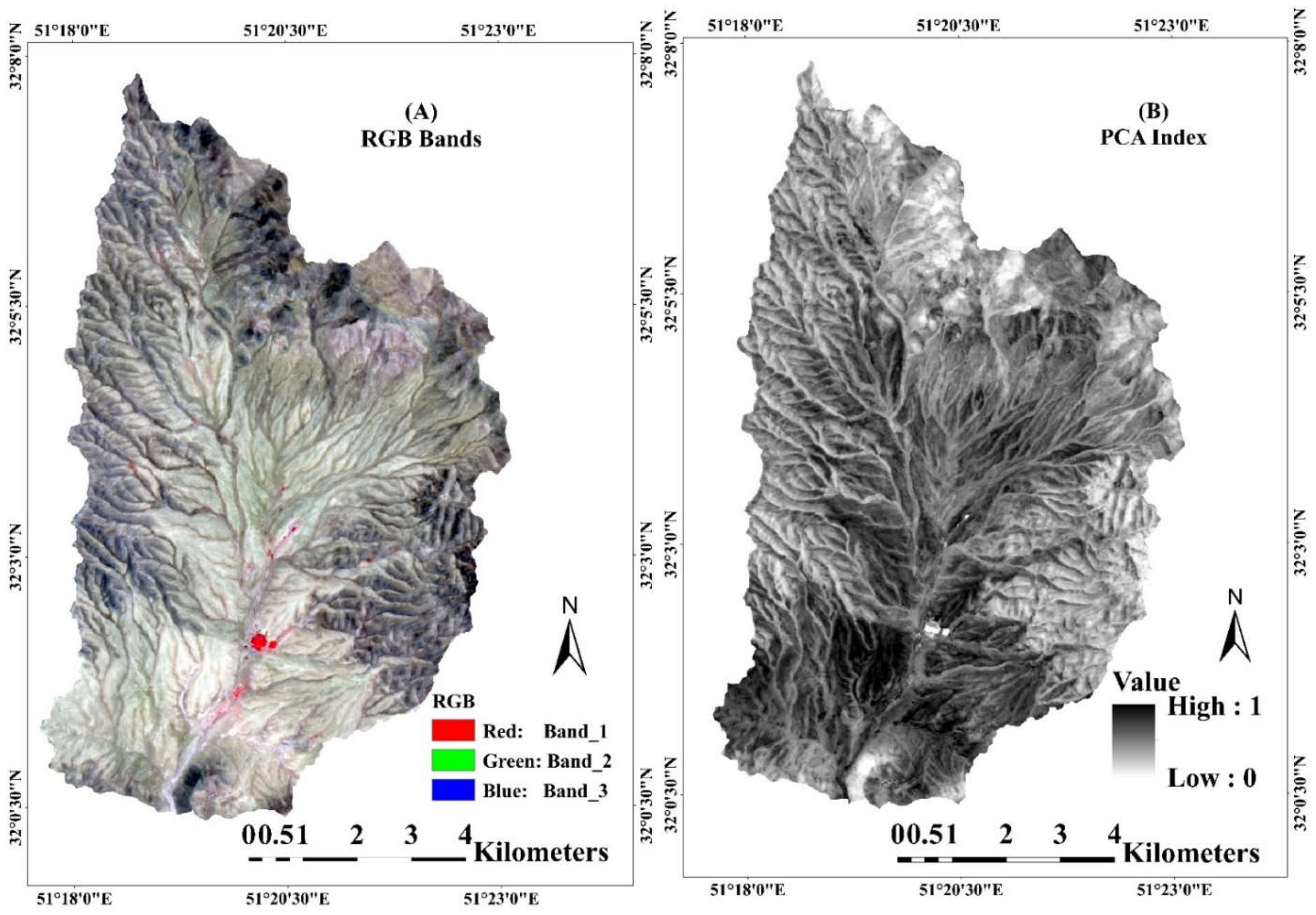
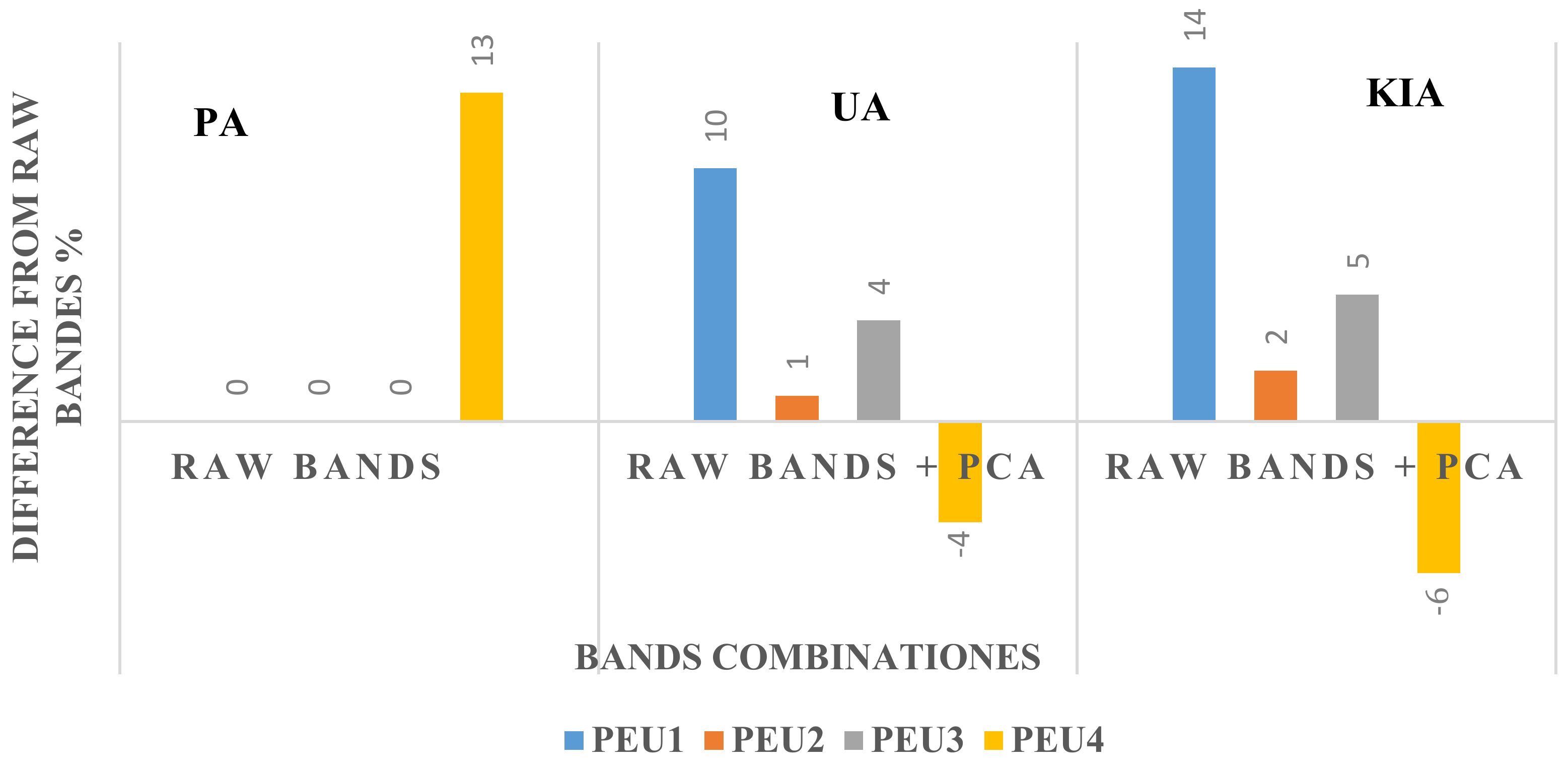
3.4. Impact of Auxiliary Data on PEUs Classification Accuracy
3.5. Statistical Comparison
4. Discussion
4.1. The Selection of Pixel-Based and Object-Based Approaches in PEUs Classification
4.2. Selection Best Classification Algorithm
4.3. Impact of Auxiliary Data on PEUs Classification Accuracy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Macintyre, P.; van Niekerk, A.; Mucina, L. Efficacy of multi-season Sentinel-2 imagery for compositional vegetation classification. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101980. [Google Scholar] [CrossRef]
- Phiri, D.; Morgenroth, J.; Xu, C.; Hermosilla, T. Effects of pre-processing methods on Landsat OLI-8 land cover classification using OBIA and random forests classifier. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 170–178. [Google Scholar] [CrossRef]
- Topaloğlu, R.H.; Sertel, E.; Musaoğlu, N. Assessment of Classification Accuracies of Sentinel-2 and Landsat-8 Data for Land Cover/Use Mapping. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 1055–1059. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Fu, H.; Wu, B.; Clinton, N.; Gong, P. Exploring the potential role of feature selection in global land-cover mapping. Int. J. Remote Sens. 2016, 37, 5491–5504. [Google Scholar] [CrossRef]
- Hurskainen, P.; Adhikari, H.; Siljander, M.; Pellikka, P.K.E.; Hemp, A. Auxiliary datasets improve accuracy of object-based land use/land cover classification in heterogeneous savanna landscapes. Remote Sens. Environ. 2019, 233, 111354. [Google Scholar] [CrossRef]
- Yuan, Q.; Wei, Y.; Meng, X.; Shen, H.; Zhang, L. A Multiscale and Multidepth Convolutional Neural Network for Remote Sensing Imagery Pan-Sharpening. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 978–989. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Okin, G.S.; Zhang, J. Leveraging Google Earth Engine (GEE) and machine learning algorithms to incorporate in situ measurement from different times for rangelands monitoring. Remote Sens. Environ. 2020, 236, 111521. [Google Scholar] [CrossRef]
- Spiegal, S.; Bartolome, J.W.; White, M.D. Applying ecological site concepts to adaptive conservation management on an iconic Californian landscape. Rangelands 2016, 38, 365–370. [Google Scholar] [CrossRef] [Green Version]
- Caudle, D.; DiBenedetto, J.; Karl, M. Interagency Ecological Site Handbook for Rangelands; US Department of the Interior, Bureau of Land Management: Grand Junction, CO, USA, 2013.
- Leh, M.D.K.; Matlock, M.D.; Cummings, E.C.; Nalley, L.L. Quantifying and mapping multiple ecosystem services change in West Africa. Agric. Ecosyst. Environ. 2013, 165, 6–18. [Google Scholar] [CrossRef]
- Ratcliff, F.; Bartolome, J.; Macaulay, L.; Spiegal, S.; White, M.D. Applying ecological site concepts and state-and-transition models to a grazed riparian rangeland. Ecol Evol. 2018, 8, 4907–4918. [Google Scholar] [CrossRef]
- Blanco, P.D.; del Valle, H.F.; Bouza, P.J.; Metternicht, G.I.; Hardtke, L.A. Ecological site classification of semiarid rangelands: Synergistic use of Landsat and Hyperion imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 29, 11–21. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.; Chica-Olmo, M. Land cover change analysis of a Mediterranean area in Spain using different sources of data: Multi-seasonal Landsat images, land surface temperature, digital terrain models and texture. Appl. Geogr. 2012, 35, 208–218. [Google Scholar] [CrossRef]
- Sluiter, R.; Pebesma, E.J. Comparing techniques for vegetation classification using multi- and hyperspectral images and ancillary environmental data. Int. J. Remote Sens. 2010, 31, 6143–6161. [Google Scholar] [CrossRef]
- Thakkar, A.K.; Desai, V.R.; Patel, A.; Potdar, M.B. Post-classification corrections in improving the classification of Land Use/Land Cover of arid region using RS and GIS: The case of Arjuni watershed, Gujarat, India. Egypt. J. Remote Sens. Space Sci. 2017, 20, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Xie, Z.; Chen, Y.; Lu, D.; Li, G.; Chen, E. Classification of Land Cover, Forest, and Tree Species Classes with ZiYuan-3 Multispectral and Stereo Data. Remote Sens. 2019, 11, 164. [Google Scholar] [CrossRef] [Green Version]
- Castillejo-González, I.L.; Angueira, C.; García-Ferrer, A.; Sánchez de la Orden, M. Combining Object-Based Image Analysis with Topographic Data for Landform Mapping: A Case Study in the Semi-Arid Chaco Ecosystem, Argentina. ISPRS Int. J. Geo-Inf. 2019, 8, 132. [Google Scholar] [CrossRef] [Green Version]
- Nath, S.S.; Mishra, G.; Kar, J.; Chakraborty, S.; Dey, N. A survey of image classification methods and techniques. In Proceedings of the 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari, India, 10–11 July 2014; pp. 604–607. [Google Scholar] [CrossRef]
- Novelli, A.; Aguilar, M.A.; Nemmaoui, A.; Aguilar, F.J.; Tarantino, E. Performance evaluation of object based greenhouse detection from Sentinel-2 MSI and Landsat 8 OLI data: A case study from Almería (Spain). Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 403–411. [Google Scholar] [CrossRef] [Green Version]
- Lebourgeois, V.; Dupuy, S.; Vintrou, É.; Ameline, M.; Butler, S.; Bégué, A. A Combined Random Forest and OBIA Classification Scheme for Mapping Smallholder Agriculture at Different Nomenclature Levels Using Multisource Data (Simulated Sentinel-2 Time Series, VHRS and DEM). Remote Sens. 2017, 9, 259. [Google Scholar] [CrossRef] [Green Version]
- Macintyre, P.D.; Van Niekerk, A.; Dobrowolski, M.P.; Tsakalos, J.L.; Mucina, L. Impact of ecological redundancy on the performance of machine learning classifiers in vegetation mapping. Ecol Evol. 2018, 8, 6728–6737. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Wan, B.; Qiu, P.; Su, Y.; Guo, Q.; Wu, X. Artificial Mangrove Species Mapping Using Pléiades-1: An Evaluation of Pixel-Based and Object-Based Classifications with Selected Machine Learning Algorithms. Remote Sens. 2018, 10, 294. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Yu, L.; Zhao, Y.; Cheng, Y.; Xu, Y.; Li, C.; Gong, P. A multiple dataset approach for 30-m resolution land cover mapping: A case study of continental Africa. Int. J. Remote Sens. 2018, 39, 3926–3938. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Rabe, A.; Peters, M.; Hostert, P. Mapping pan-European land cover using Landsat spectral-temporal metrics and the European LUCAS survey. Remote Sens. Environ. 2019, 221, 583–595. [Google Scholar] [CrossRef]
- Pat, S.; Chavez, J. An Improved Dark-Object Subtraction Technique for Atmospheric Scattering Correction of Multispectral Data. Remote Sens. Environ. 1988, 24, 459–479. [Google Scholar]
- Zhang, X.; Liu, L.; Wang, Y.; Hu, Y.; Zhang, B. A SPECLib-based operational classification approach: A preliminary test on China land cover mapping at 30 m. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 83–94. [Google Scholar] [CrossRef]
- Sirin, A.; Medvedeva, M.; Maslov, A.; Vozbrannaya, A. Assessing the Land and Vegetation Cover of Abandoned Fire Hazardous and Rewetted Peatlands: Comparing Different Multispectral Satellite Data. Land 2018, 7, 71. [Google Scholar] [CrossRef] [Green Version]
- Meher, S.K. Semisupervised self-learning granular neural networks for remote sensing image classification. Appl. Soft Comput. 2019, 83, 105655. [Google Scholar] [CrossRef]
- Zambon, M.; Lawrence, R.; Bunn, A.; Powell, S. Effect of Alternative Splitting Rules on Image Processing Using Classification Tree Analysis. Photogramm. Eng. Remote Sens. 2006, 72, 25–30. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, M.; Nemmaoui, A.; Novelli, A.; Aguilar, F.; García Lorca, A. Object-Based Greenhouse Mapping Using Very High Resolution Satellite Data and Landsat 8 Time Series. Remote Sens. 2016, 8, 513. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Xia, F. Assessing object-based classification: Advantages and limitations. Remote Sens. Lett. 2010, 1, 187–194. [Google Scholar] [CrossRef]
- Ouzemou, J.E.; El Harti, A.; Lhissou, R.; El Moujahid, A.; Bouch, N.; El Ouazzani, R.; Bachaoui, E.M.; El Ghmari, A. Crop type mapping from pansharpened Landsat 8 NDVI data: A case of a highly fragmented and intensive agricultural system. Remote Sens. Appl. Soc. Environ. 2018, 11, 94–103. [Google Scholar] [CrossRef]
- De Giglio, M.; Greggio, N.; Goffo, F.; Merloni, N.; Dubbini, M.; Barbarella, M. Comparison of Pixel- and Object-Based Classification Methods of Unmanned Aerial Vehicle Data Applied to Coastal Dune Vegetation Communities: Casal Borsetti Case Study. Remote Sens. 2019, 11, 1416. [Google Scholar] [CrossRef] [Green Version]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Segmentation optimization and stratified object-based analysis for semi-automated geomorphological mapping. Remote Sens. Environ. 2011, 115, 2976–2985. [Google Scholar] [CrossRef]
- Rogan, J.; Franklin, J.; Stow, D.; Miller, J.; Woodcock, C.; Roberts, D. Mapping land-cover modifications over large areas: A comparison of machine learning algorithms. Remote Sens. Environ. 2008, 112, 2272–2283. [Google Scholar] [CrossRef]
- Teffera, Z.L.; Li, J.; Debsu, T.M.; Menegesha, B.Y. Assessing land use and land cover dynamics using composites of spectral indices and principal component analysis: A case study in middle Awash subbasin, Ethiopia. Appl. Geogr. 2018, 96, 109–129. [Google Scholar] [CrossRef]
- Ge, G.; Shi, Z.; Zhu, Y.; Yang, X.; Hao, Y. Land use/cover classification in an arid desert-oasis mosaic landscape of China using remote sensed imagery: Performance assessment of four machine learning algorithms. Glob. Ecol. Conserv. 2020, 88, e00971. [Google Scholar] [CrossRef]
- Stumpf, F.; Schneider, M.K.; Keller, A.; Mayr, A.; Rentschler, T.; Meuli, R.G.; Schaepman, M.; Liebisch, F. Spatial monitoring of grassland management using multi-temporal satellite imagery. Ecol. Indic. 2020, 113, 106201. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Dominant Species * | Field Photos | Abbreviation | Structure | Accompanied Species * | Dominant Soil Type |
|---|---|---|---|---|---|---|
| PEU1 | Astragalus verus Olivier. (23.4%) |  | As ve | Scrubby | Alyssum linifolium Steph. ex Wild. (2.5%) Echinophora platyloba DC. (2.5%) Scariola orientalis (Boiss)Sojak. (2.5%) Eurotia ceratoides (L.) C.A. Mey. (2%) Heteranthelium piliferum Hochst. ex Jaub. (1.8%) Cousinia bachtiarica Boiss. & Hausskn. (1.8%) Bromus tectorum L. (1.6%) Astragalus macropelmatus Bunge. (1.3%) Taeniatherum crinitum (Schreb.) Nevski. (1%) Acanthophyllum spinosum (Desf.) C.A.Mey. (0.8%) | Sandy loamy to loamy clay |
| PEU2 | Bromus tomentellus Boiss. (8.9%) |  | Br to | Grassland | Phlomis olivieri Benth. (3%) Bromus danthoniae Trin. (3%) Stipa hohenackeriana Trin & Rupr. (2.6%) Alyssum marginatum Steud. (2.5%) Bromus tectorum L. (2.4%) Achillea wilhelmsii C. Koch, L. (1.8%) Astragalus microcephalus Willd. (1.5%) Centaurea aucheri (DC.) Wagenitz. (1.2%) Gypsophila struthium. (1%) Ajuga chamaecistus Ging. (0.5%) | loamy and Silty Loamy |
| PEU3 | Scariola orientalis (Boiss.) Sojak. (9.25%) |  | Sc or | Semi-scrub | Noaea mucronata (Forsk.) Aschers et. Sch. (2.5%) Onobrychis cornuta (L.) Desv. (1.6%) Astragalus microcephalus Willd. (1.5%) Polygonum aridum Boiss. & Hausskn. (1.5%) Taeniatherum crinitum (Schreb.) Nevski. (1.5%) Cousinia crispa, Jaub & Spach. (1.2%) Stachys inflata Benth. (1.2%) Tragopogon longirostris Bischoff ex Sch.Bip. (1%) Acanthophyllum spinosum (Desf.) C.A.Mey. (0.5%) Chardinia orientalis (L.) Kuntze. (0.5%) | Clay loam |
| PEU4 | Astragalus verus Olivier (8.6%)—Bromus tomentellus Boiss (5.4) |  | As ve-Br to | Scrubby-grassland | Noaea mucronata (Forsk.) Aschers et. Sch. (2%) Alyssum marginatum Steud. (1.5%) Euphorbia azerbadjhanica Bordz. (1.5%) Phlomis persica Boiss. (1.5%) Turginia latifolia (L.) Hoffm. (1.5%) Astragalus effusus Bunge. (1.3%) Bromus danthoniae Trin. (1.2%) Stachys lavandulifolia Vahl. (1%) Cichorium intybus L. (0.5%) Achillea wilhelmsii C. Koch, L. (0.5%) | loamy and Silty Loamy |
| MD | MLC | NN-MLP | CTA | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | PA | UA | KIA | PA | UA | KIA | PA | UA | KIA | PA | UA | KIA | |
| PBCM | PEU1 | 89 | 80 | 73 | 89 | 91 | 87 | 97 | 67 | 55 | 80 | 86 | 80 |
| PEU2 | 49 | 67 | 55 | 72 | 79 | 70 | 97 | 49 | 31 | 63 | 64 | 51 | |
| PEU3 | 45 | 36 | 13 | 85 | 67 | 55 | 5 | 100 | 100 | 67 | 58 | 43 | |
| PEU4 | 41 | 47 | 28 | 71 | 84 | 78 | 23 | 5 | 33 | 57 | 61 | 48 | |
| OK = 42% OA = 57% | OK = 70% OA = 78% | OK = 39% OA = 55% | OK = 55% OA = 67% | ||||||||||
| OBCM | PEU1 | 89 | 84 | 77 | 89 | 93 | 90 | 93 | 91 | 88 | 97 | 90 | 86 |
| PEU2 | 63 | 61 | 47 | 72 | 75 | 65 | 69 | 58 | 43 | 93 | 80 | 72 | |
| PEU3 | 32 | 34 | 100 | 83 | 64 | 51 | 65 | 50 | 32 | 83 | 81 | 73 | |
| PEU4 | 50 | 52 | 35 | 69 | 86 | 81 | 41 | 90 | 86 | 69 | 96 | 95 | |
| OK = 44% OA = 59% | OK = 71% OA = 78% | OK = 61% OA = 72% | OK = 80% OA = 86% | ||||||||||
| Accuracy Assessment Results Based on Raw Bands Using Classification Tree Analysis | |||||||
| Type | PEU1 | PEU2 | PEU3 | PEU4 | PA | UA | KIA |
| PEU1 | 44 | 0 | 0 | 5 | 97 | 90 | 86 |
| PEU2 | 0 | 42 | 8 | 3 | 93 | 80 | 72 |
| PEU3 | 0 | 3 | 37 | 6 | 83 | 81 | 73 |
| PEU4 | 1 | 0 | 0 | 30 | 69 | 96 | 95 |
| Overall Kappa: 80% | Overall Accuracy: 86% | ||||||
| Accuracy Assessment Results Based on Raw Bands + PCA Using Classification Tree Analysis | |||||||
| Type | PEU1 | PEU2 | PEU3 | PEU4 | PA | UA | KIA |
| PEU1 | 44 | 0 | 0 | 0 | 97 | 100 | 100 |
| PEU2 | 0 | 42 | 6 | 4 | 93 | 81 | 74 |
| PEU3 | 0 | 3 | 37 | 4 | 83 | 85 | 78 |
| PEU4 | 1 | 0 | 2 | 36 | 82 | 92 | 89 |
| Overall Kappa: 85% | Overall Accuracy: 89% | ||||||
| PEUs Accuracy | Sig | |||
|---|---|---|---|---|
| Classification Algorithms | PBCM-Sig | OBCM-Sig | ||
| User’s Accuracy (UA) | 0.021 * | MLC-MD | 0.036 | 0.03 |
| MLC-NN | 0.071 | 0.34 | ||
| MLC-CTA | 0.22 | 0.66 | ||
| MD-NN | 0.77 | 0.22 | ||
| MD-CTA | 0.38 | 0.009 | ||
| NN-CTA | 0.56 | 0.17 | ||
| Kappa Index of Agreement (KIA) | 0.039 * | MLC-MD | 0.043 | 0.030 |
| MLC-NN | 0.083 | 0.38 | ||
| MLC-CTA | 0.24 | 0.66 | ||
| MD-NN | 0.77 | 0.19 | ||
| MD-CTA | 0.38 | 0.009 | ||
| NN-CTA | 0.56 | 0.19 | ||
| Producer’s Accuracy (PA) | 0.095 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghababaei, M.; Ebrahimi, A.; Naghipour, A.A.; Asadi, E.; Verrelst, J. Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms. Remote Sens. 2021, 13, 3433. https://doi.org/10.3390/rs13173433
Aghababaei M, Ebrahimi A, Naghipour AA, Asadi E, Verrelst J. Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms. Remote Sensing. 2021; 13(17):3433. https://doi.org/10.3390/rs13173433
Chicago/Turabian StyleAghababaei, Masoumeh, Ataollah Ebrahimi, Ali Asghar Naghipour, Esmaeil Asadi, and Jochem Verrelst. 2021. "Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms" Remote Sensing 13, no. 17: 3433. https://doi.org/10.3390/rs13173433
APA StyleAghababaei, M., Ebrahimi, A., Naghipour, A. A., Asadi, E., & Verrelst, J. (2021). Classification of Plant Ecological Units in Heterogeneous Semi-Steppe Rangelands: Performance Assessment of Four Classification Algorithms. Remote Sensing, 13(17), 3433. https://doi.org/10.3390/rs13173433