
Sentinel-1&2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data
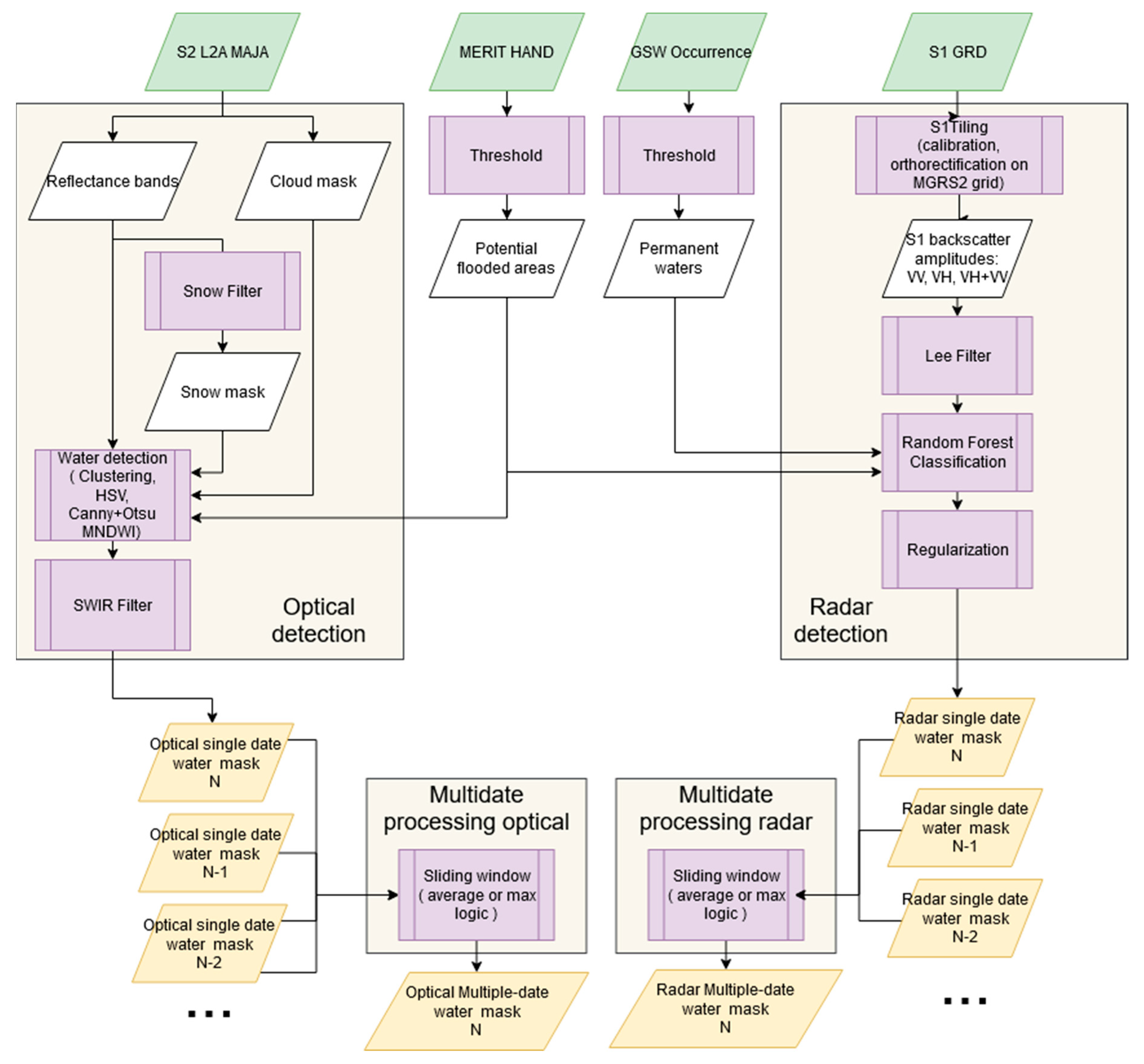
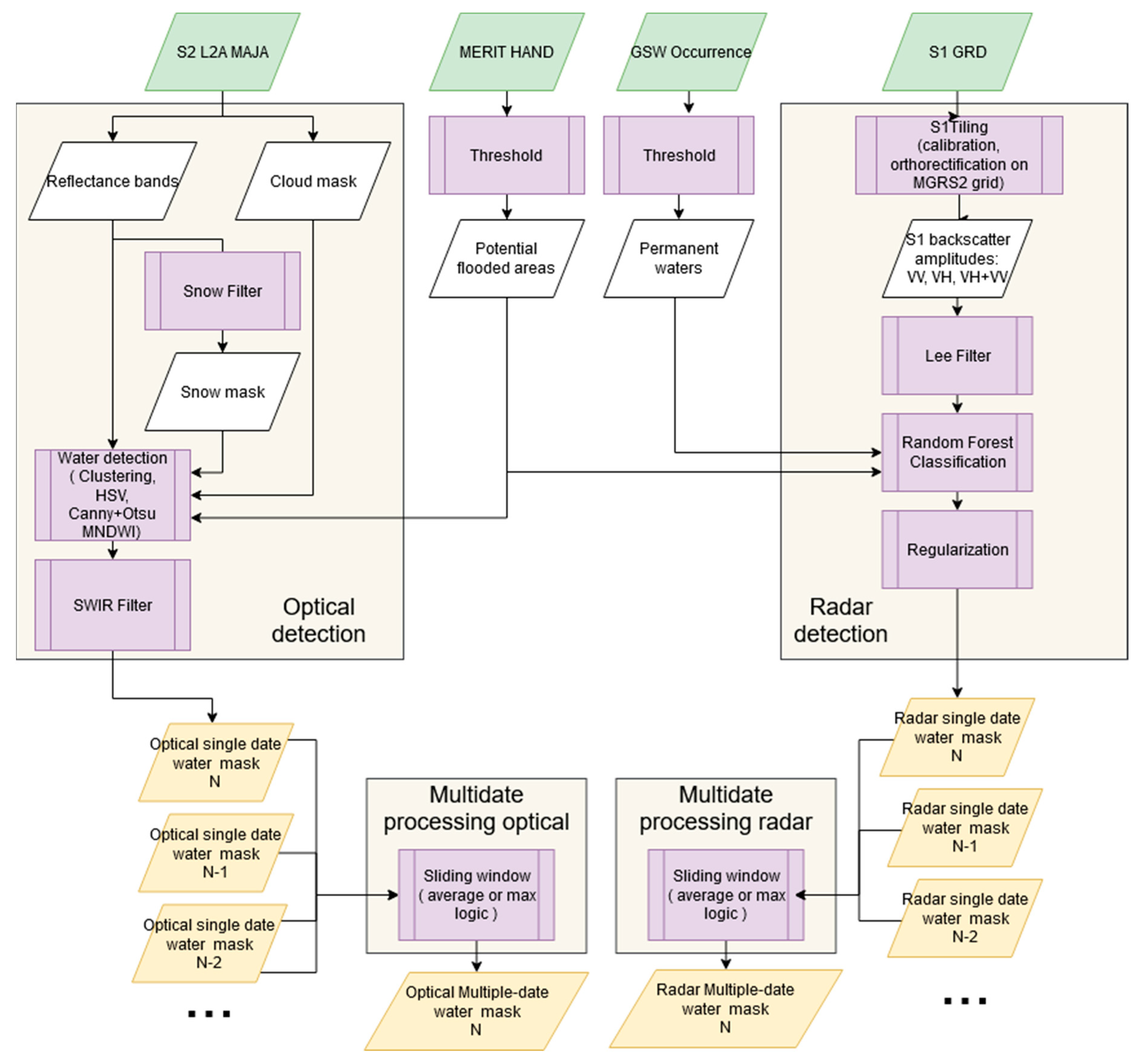
2.2. Water Detection Methods
2.3. Region of Interest Extraction Process and Surface Water Area Estimation
2.4. Reference Data-Large Scenes Water Masks
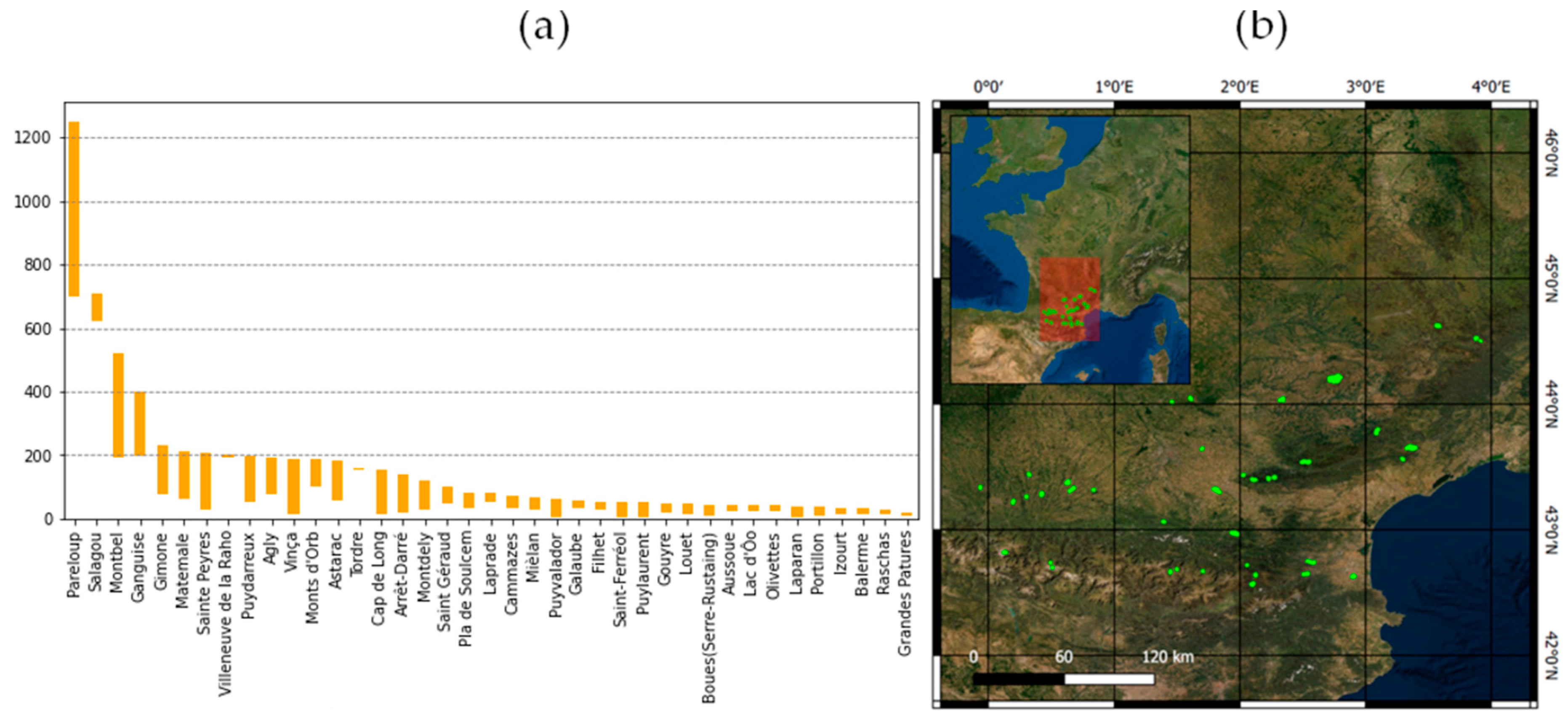
2.5. Reference Data-Reservoirs Area
2.6. Large Scene Water Masks Assessment
2.7. Reservoirs Area Assessment
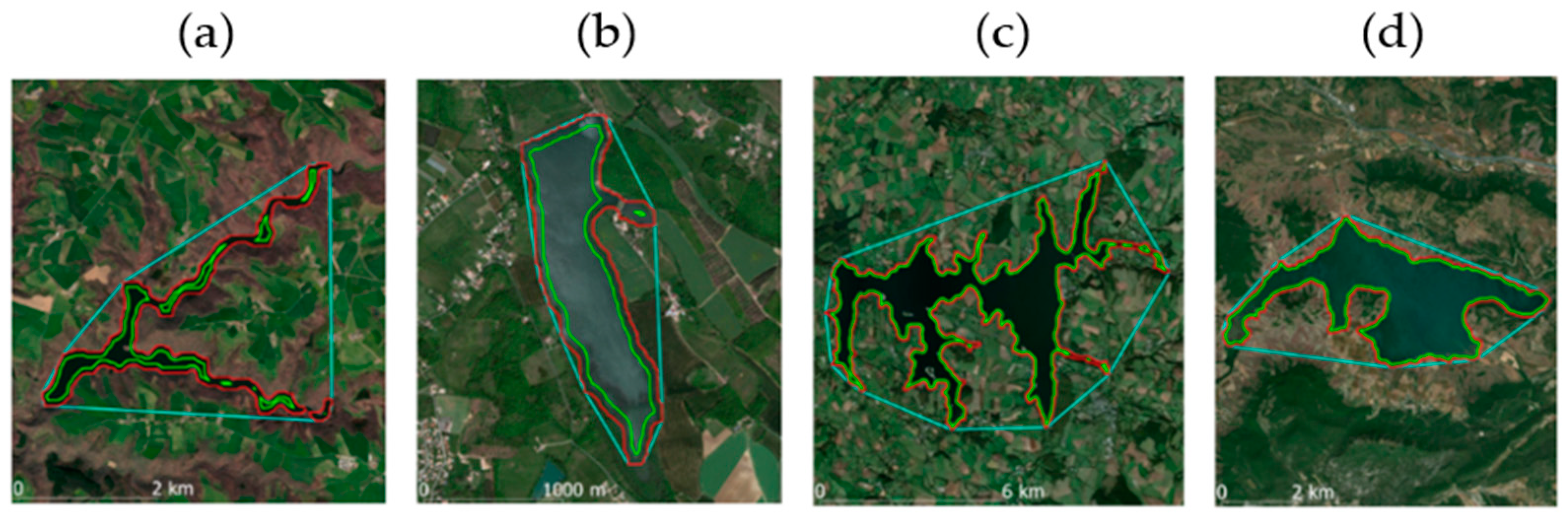
2.8. Reservoir Characteristics and Geomorphological Indicators
3. Results
3.1. Large Scene Water Masks Evaluation
3.1.1. Optical Water Masks Evaluation at Single-Date Observation
3.1.2. Radar Water Masks Evaluation at Single-Date Observation
3.1.3. Multiple-Date Water Masks Evaluation
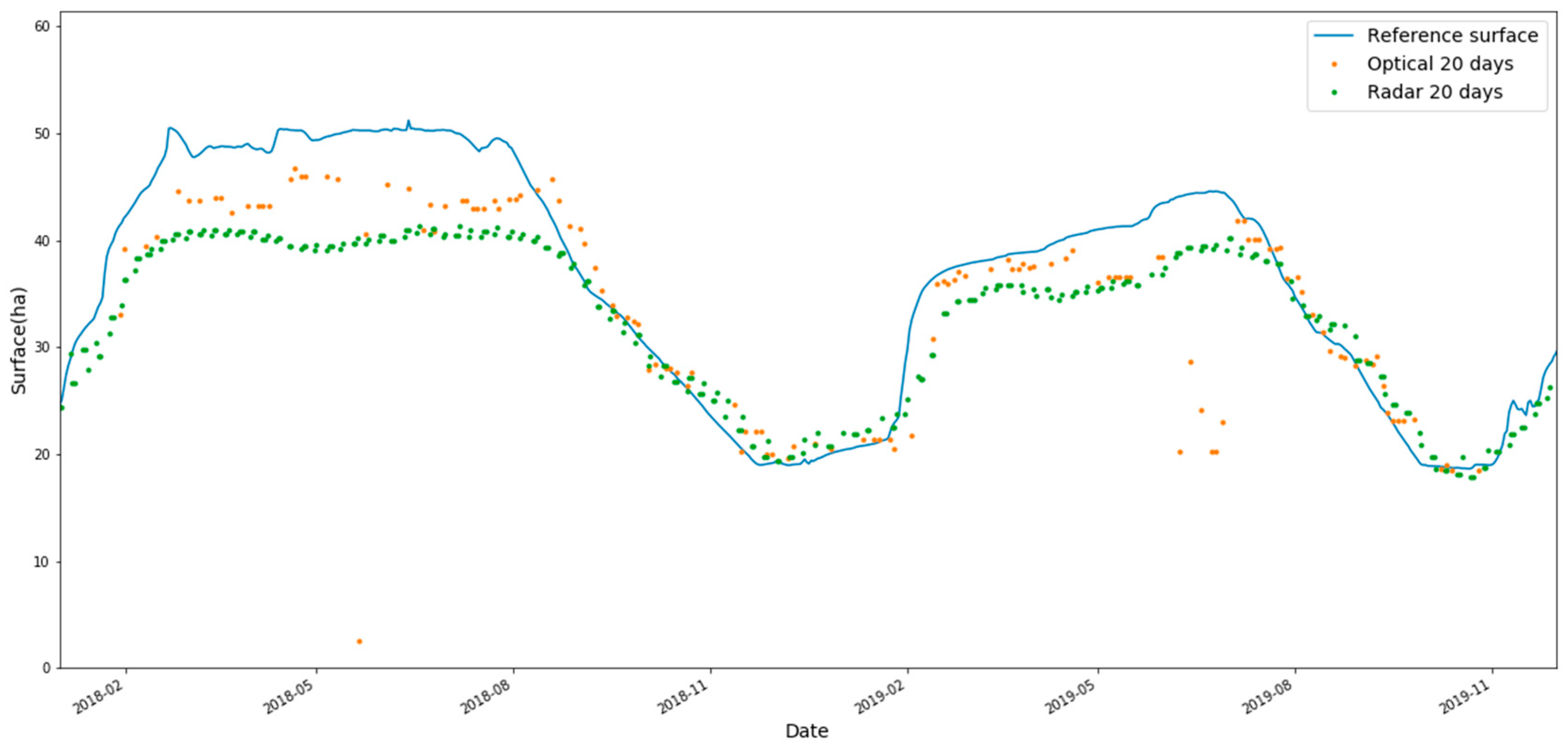
3.2. Area Monitoring Evaluation on Reservoirs
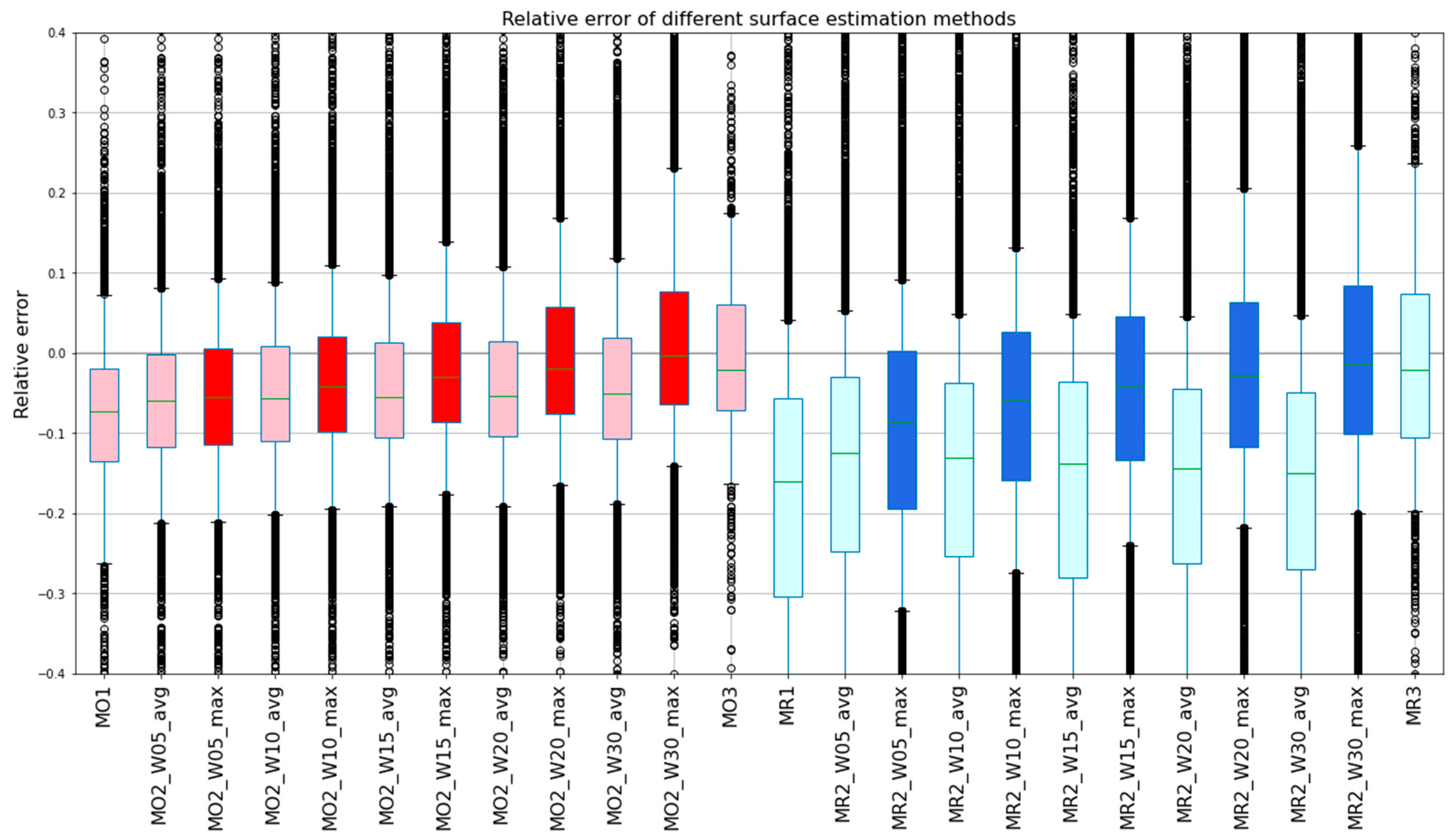
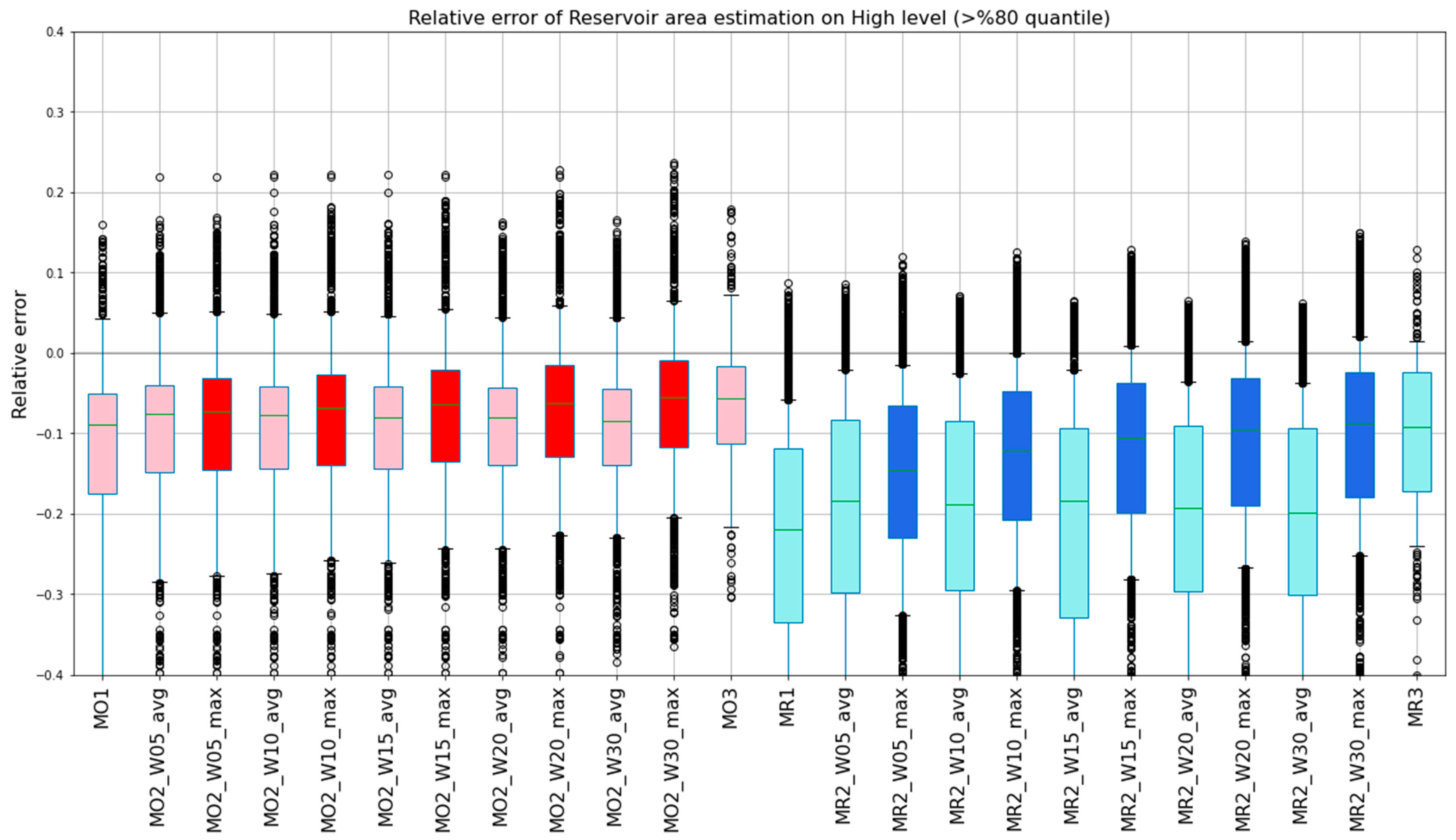
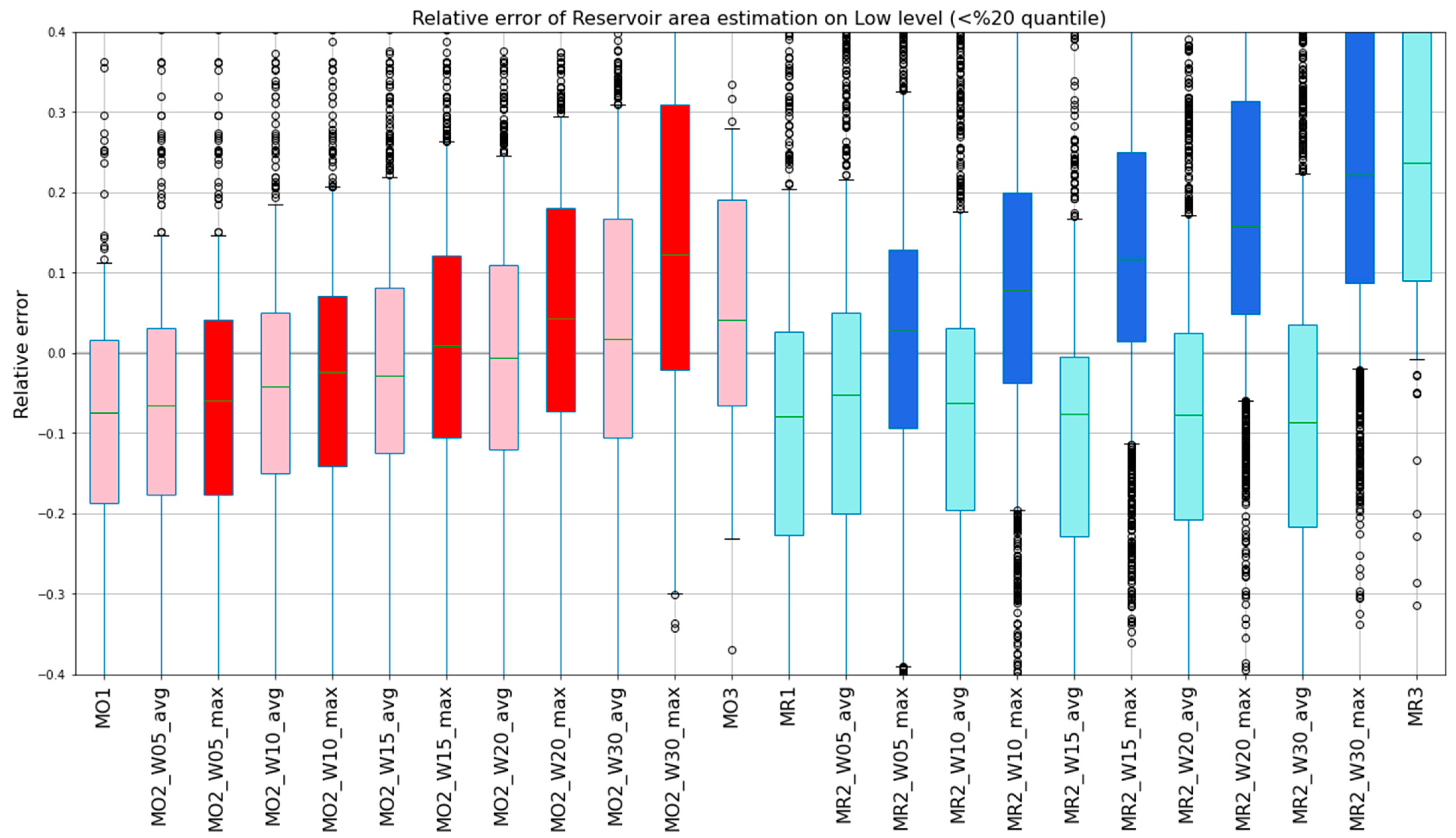
3.2.1. Error Assessment of Reservoirs Area Monitoring
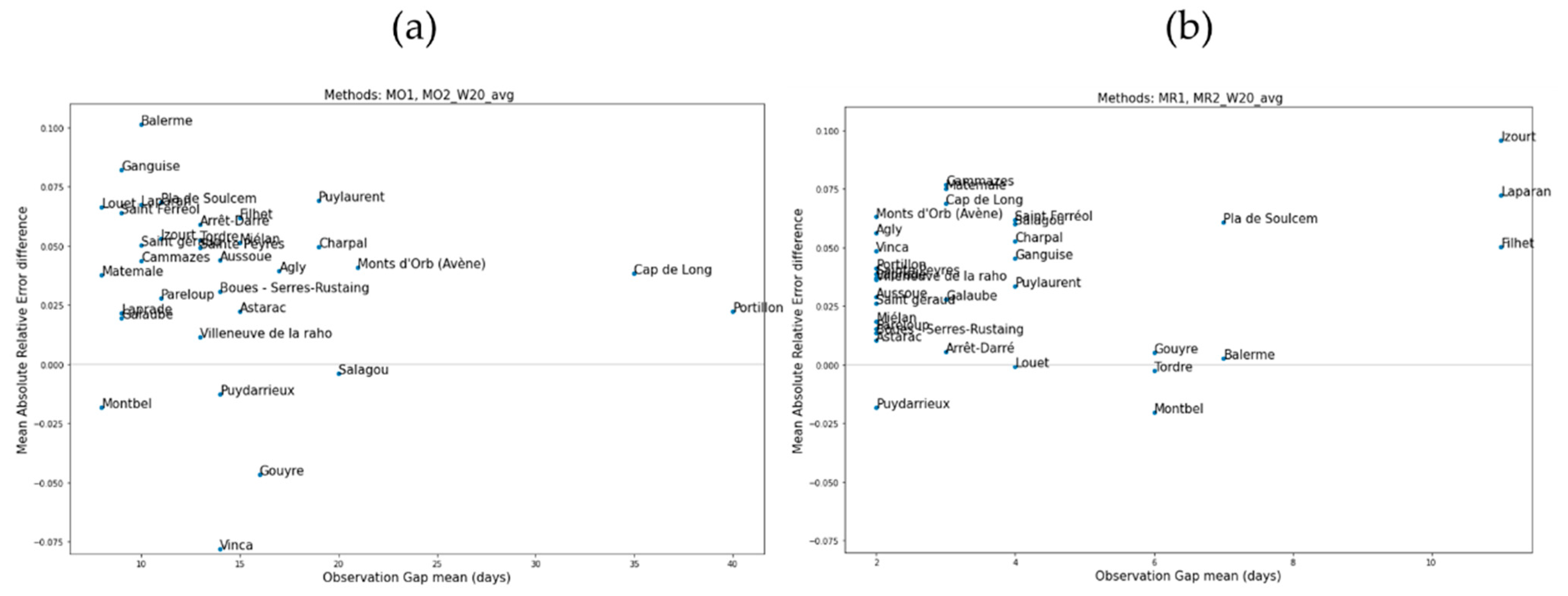
- Sensor: optical measurements (“MO”) and radar measurements (“MR”), based on the same water classification methods evaluated in Section 3.1.3.
- Single/Multi-date method: They are categorized in three classes: Single-date methods are based on just one satellite observation (“MO1”, “MR1”), multiple-date methods apply a backwards time-window (“MO2”, “MR2”) and the last methods calculate the sum of all the surfaces detected as water at least once during a natural month (“MO3”, “MR3”). Multiple-date methods (“MO2”, “MR2”) present two possible logics: average (“_avg”) and maximum pixel wise surface (“_max”), as described in Section 2.2. Also, multiple-date methods with time-windows have a suffix (“_WN”), where N is the time-window size in days.
3.2.2. Influence of Reservoir Filling Rate
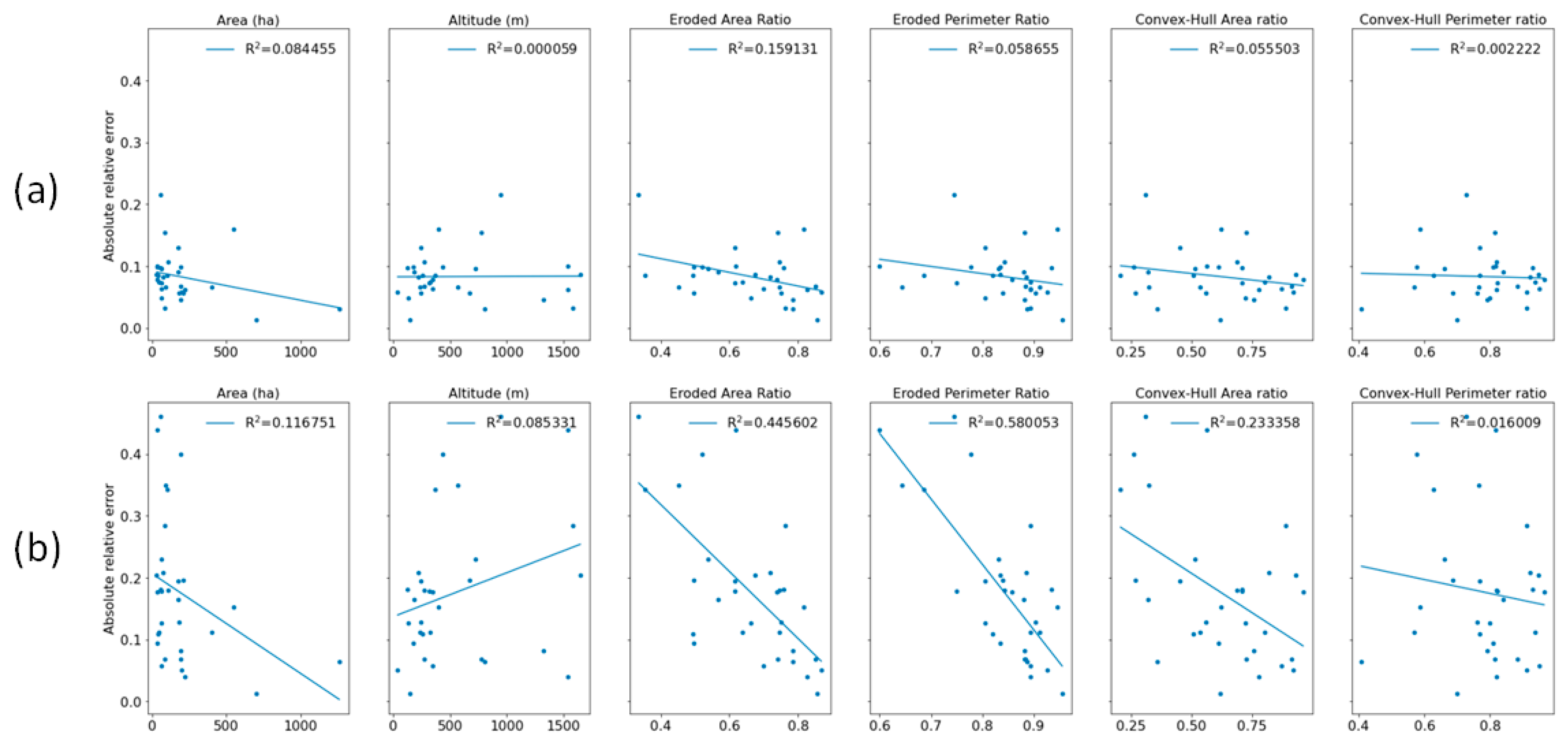
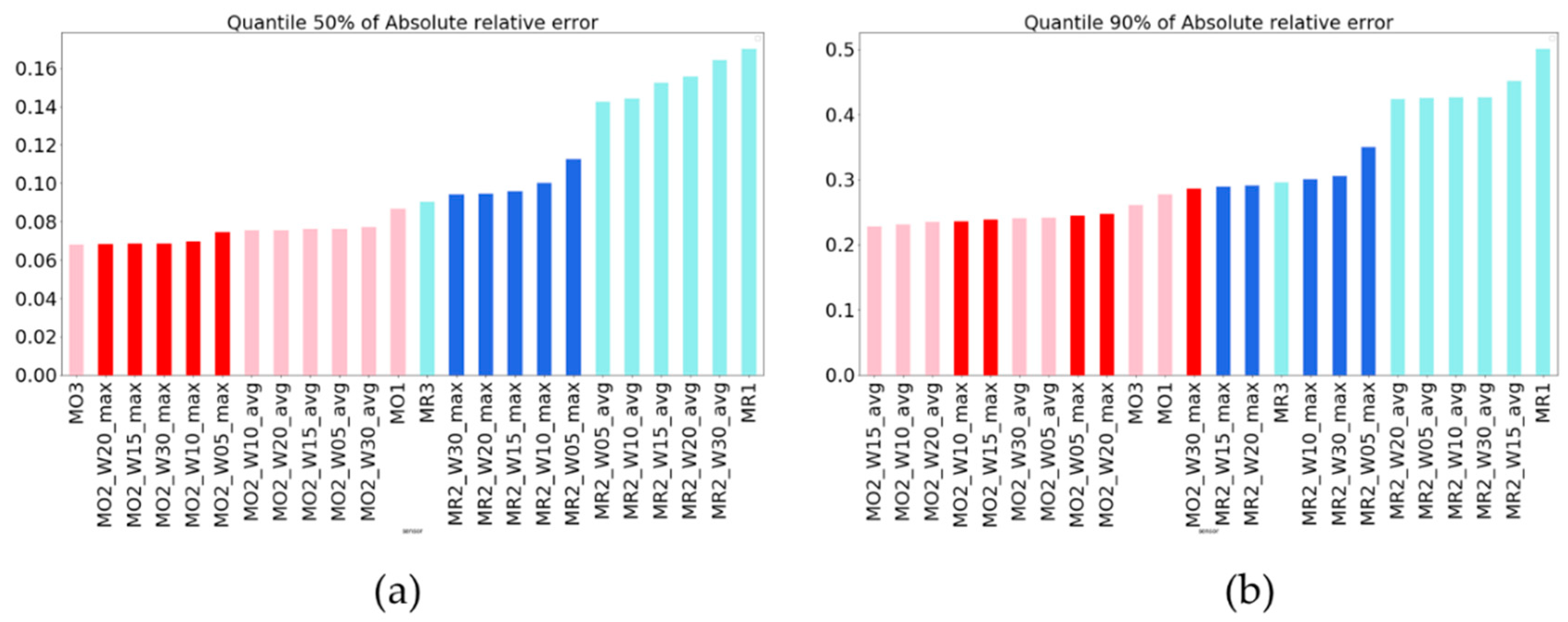
3.2.3. Analysis of Absolute of Relative Error on Reservoir Area Estimation
- On the optical methods, MO3 (maximum on natural month) provides the best results on quantile 50% (median value), but it performs worse on quantile 90% compared with other optical methods. Time-window methods based on “maximum” logic perform well on 50% quantiles, but they are not the best on 90%. Time-window methods based on “average” logic with 10-15-20 days perform well on quantile 90%. For example, the mean absolute relative error in MO1 is 16.9%, whereas MO2_W15_avg is 12.9%. In conclusion, “average” and “max” time-windows have similar positive results compared to single-date methods.
- On the radar methods, MR3 (maximum on natural month) provides the best performance on both quantiles 50% and 90%; on the time-window methods, methods based on “maximum” outperform the “average” methods for both quantiles. For example, the mean absolute relative error in MR1 is 22.7%, whereas MR2_W10_avg is 19.5% and MR2_W10_max is 15.1%. For “maximum” methods, relatively long windows (20, 30 days) perform better than short windows (5, 10 days). For “average” methods, quantiles 50% are better with short windows (5, 10 days) but quantiles 90% are better with middle (10, 20 days) windows.
- Any multi-temporal method (“MO2”, “MO3”, “MR2”, “MR3”) outperforms the other methods based on single observations (“MO1”, “MR1”) on quantile 50% and 90% of absolute of relative error on the area estimation.
- Any optical method (“MO”) outperforms the other methods based on radar observations (“MR”) on quantile 50% and 90% of absolute of relative error on the area estimation.
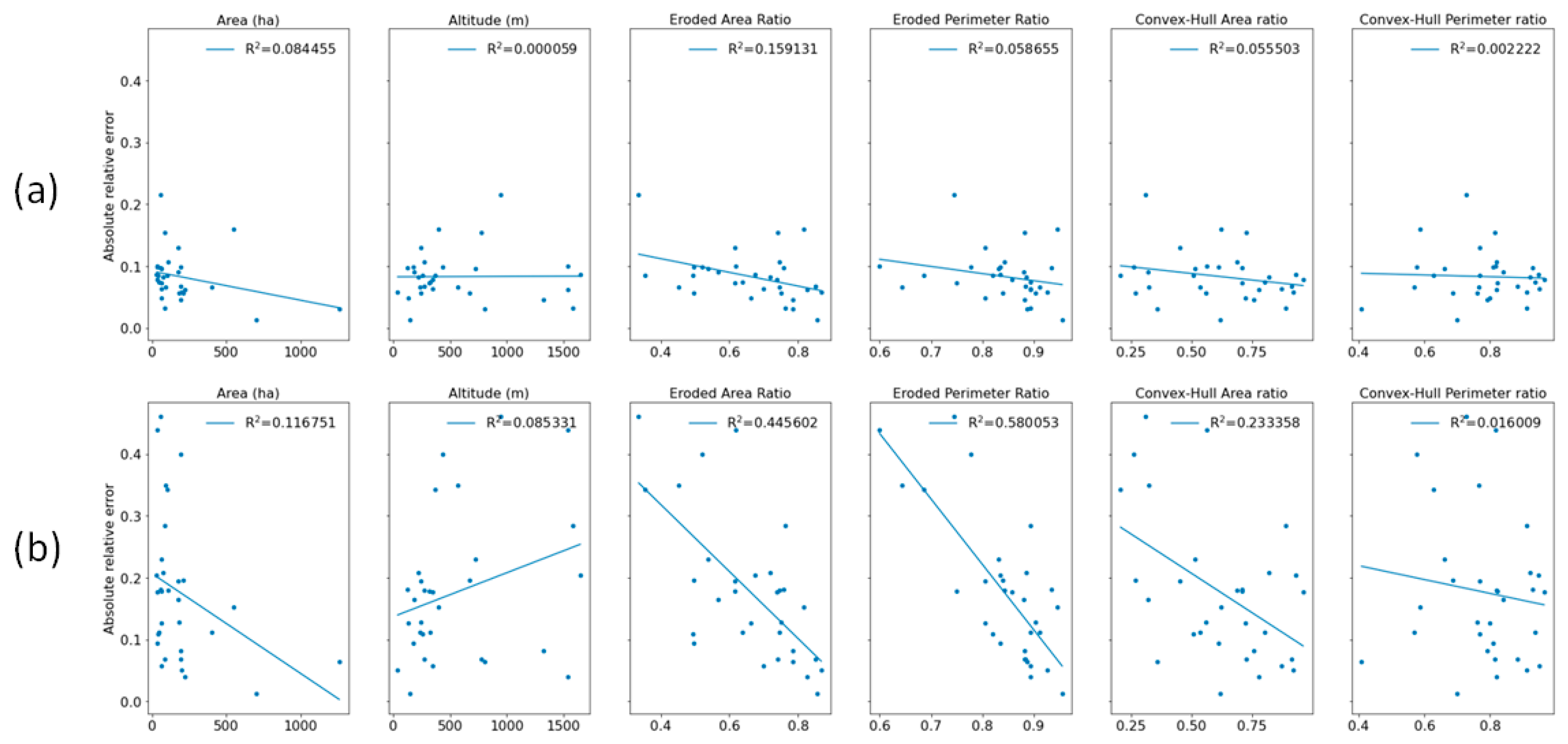
3.2.4. Geomorphological Influence on Area Estimation Quality
4. Discussion
4.1. Multitemporal Impact on Optical and Radar Detections
4.2. Observation Frequency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Biemans, H.; Haddeland, I.; Kabat, P.; Ludwig, F.; Hutjes, R.W.A.; Heinke, J.; Von Bloh, W.; Gerten, D. Impact of reservoirs on river discharge and irrigation water supply during the 20th century. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Nijssen, B.; Gao, H.; Lettenmaier, D.P. The Contribution of Reservoirs to Global Land Surface Water Storage Variations. J. Hydrometeorol. 2016, 17, 309–325. [Google Scholar] [CrossRef]
- Habets, F.; Molénat, J.; Carluer, N.; Douez, O.; Leenhardt, D. The cumulative impacts of small reservoirs on hydrology: A review. Sci. Total Environ. 2018, 643, 850–867. [Google Scholar] [CrossRef] [Green Version]
- Blanc, E.; Strobl, E. Is Small Better? A Comparison of the Effect of Large and Small Dams on Cropland Productivity in South Africa. World Bank Econ. Rev. 2013, 28, 545. Available online: https://ssrn.com/abstract=2309848 (accessed on 9 August 2021). [CrossRef] [Green Version]
- Acheampong, E.N.; Ozor, N.; Sekyi-Annan, E. Development of small dams and their impact on livelihoods: Cases from northern Ghana. Afr. J. Agric. Res. 2014, 9, 1867–1877. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Busker, T.; De Roo, A.; Gelati, E.; Schwatke, C.; Adamovic, M.; Bisselink, B.; Pekel, J.-F.; Cottam, A. A global lake and reservoir volume analysis using a surface water dataset and satellite altimetry. Hydrol. Earth Syst. Sci. 2019, 23, 669–690. [Google Scholar] [CrossRef] [Green Version]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water Bodies’ Mapping from Sentinel-2 Imagery with Modified Normalized Difference Water Index at 10-m Spatial Resolution Produced by Sharpening the SWIR Band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef] [Green Version]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Acharya, T.D.; Subedi, A.; Lee, D.H. Evaluation of Water Indices for Surface Water Extraction in a Landsat 8 Scene of Nepal. Sensors 2018, 18, 2580. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fisher, A.; Flood, N.; Danaher, T. Comparing Landsat water index methods for automated water classification in eastern Australia. Remote Sens. Environ. 2016, 175, 167–182. [Google Scholar] [CrossRef]
- Yang, X.; Qin, Q.; Yésou, H.; Ledauphin, T.; Koehl, M.; Grussenmeyer, P.; Zhu, Z. Monthly estimation of the surface water extent in France at a 10-m resolution using Sentinel-2 data. Remote Sens. Environ. 2020, 244, 111803. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Vancutsem, C.; Bastin, L.; Clerici, M.; Vanbogaert, E.; Bartholomé, E.; Defourny, P. A near real-time water surface detection method based on HSV transformation of MODIS multi-spectral time series data. Remote Sens. Environ. 2014, 140, 704–716. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.F.; Belward, A.; Gorelick, N. Global Water Surface Dynamics: Toward a Near Real Time Monitoring Using Landsat and Sentinel Data. AGU Fall Meet. Abstr. 2017, 2017, GC11C-0742. [Google Scholar]
- Ngoc, D.D.; Loisel, H.; Jamet, C.; Vantrepotte, V.; Duforêt-Gaurier, L.; Minh, C.D.; Mangin, A. Coastal and inland water pixels extraction algorithm (WiPE) from spectral shape analysis and HSV transformation applied to Landsat 8 OLI and Sentinel-2 MSI. Remote Sens. Environ. 2019, 223, 208–228. [Google Scholar] [CrossRef]
- Doña, C.; Morant, D.; Picazo, A.; Rochera, C.; Sánchez, J.; Camacho, A. Estimation of Water Coverage in Permanent and Temporary Shallow Lakes and Wetlands by Combining Remote Sensing Techniques and Genetic Programming. Application to the Mediterranean Basin of the Iberian Peninsula. Remote Sens. 2021, 13, 652. [Google Scholar] [CrossRef]
- Hollstein, A.; Segl, K.; Guanter, L.; Brell, M.; Enesco, M. Ready-to-Use Methods for the Detection of Clouds, Cirrus, Snow, Shadow, Water and Clear Sky Pixels in Sentinel-2 MSI Images. Remote Sens. 2016, 8, 666. [Google Scholar] [CrossRef] [Green Version]
- Yousefi, P.; Jalab, H.A.; Ibrahim, R.W.; Noor, N.F.M.; Ayub, M.N.; Gani, A. Water-Body Segmentation in Satellite Imagery Applying Modified Kernel Kmeans. Malays. J. Comput. Sci. 2018, 31, 143–154. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Object-based water body extraction model using Sentinel-2 satellite imagery. Eur. J. Remote Sens. 2017, 50, 137–143. [Google Scholar] [CrossRef] [Green Version]
- Wieland, M.; Martinis, S. A Modular Processing Chain for Automated Flood Monitoring from Multi-Spectral Satellite Data. Remote Sens. 2019, 11, 2330. [Google Scholar] [CrossRef] [Green Version]
- Bangira, T.; Alfieri, S.M.; Menenti, M.; Van Niekerk, A. Comparing Thresholding with Machine Learning Classifiers for Mapping Complex Water. Remote Sens. 2019, 11, 1351. [Google Scholar] [CrossRef] [Green Version]
- Cordeiro, M.C.; Martinez, J.-M.; Peña-Luque, S. Automatic water detection from multidimensional hierarchical clustering for Sentinel-2 images and a comparison with Level 2A processors. Remote Sens. Environ. 2021, 253, 112209. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel. In Proceedings of the Image and Signal Processing for Remote Sensing XXIII, Warsaw, Poland, 11–13 September 2017; Volume 10427. [Google Scholar]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A multi-temporal method for cloud detection, applied to FORMOSAT-2, VENµS, LANDSAT and SENTINEL-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Song, C.; Wang, J.; Ke, L.; Zhu, Y.; Zhu, J.; Ma, R.; Luo, Z. Remote Sensing-Based Modelling of the Bathymetry and Water Storage for Channel-Type Reservoirs Worldwide. Water Resour. Res. 2020, 56, 027147. [Google Scholar] [CrossRef]
- Evans, T.L.; Costa, M.; Telmer, K.; Silva, T. Using ALOS/PALSAR and RADARSAT-2 to Map Land Cover and Seasonal Inundation in the Brazilian Pantanal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 560–575. [Google Scholar] [CrossRef]
- Chapman, B.; McDonald, K.; Shimada, M.; Rosenqvist, A.; Schroeder, R.; Hess, L. Mapping Regional Inundation with Spaceborne L-Band SAR. Remote Sens. 2015, 7, 5440. [Google Scholar] [CrossRef] [Green Version]
- Brisco, B.; Short, N.; van der Sanden, J.J.; Landry, R.; Raymond, D. A semi-automated tool for surface water mapping with RADARSAT. Can. J. Remote Sens. 2009, 35, 336–344. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth Parts A/B/C 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Pham-Duc, B.; Prigent, C.; Aires, F. Surface Water Monitoring within Cambodia and the Vietnamese Mekong Delta over a Year, with Sentinel-1 SAR Observations. Water 2017, 9, 366. [Google Scholar] [CrossRef] [Green Version]
- Clement, M.; Kilsby, C.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2018, 11, 152–168. [Google Scholar] [CrossRef]
- Huang, W.; De Vries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated Extraction of Surface Water Extent from Sentinel-1 Data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef] [Green Version]
- Bolanos, S.; Stiff, D.; Brisco, B.; Pietroniro, A. Operational Surface Water Detection and Monitoring Using Radarsat. Remote Sens. 2016, 8, 285. [Google Scholar] [CrossRef] [Green Version]
- Hardy, A.; Ettritch, G.; Cross, D.E.; Bunting, P.; Liywalii, F.; Sakala, J.; Silumesii, A.; Singini, D.; Smith, M.; Willis, T.; et al. Automatic Detection of Open and Vegetated Water Bodies Using Sentinel 1 to Map African Malaria Vector Mosquito Breeding Habitats. Remote Sens. 2019, 11, 593. [Google Scholar] [CrossRef] [Green Version]
- Huth, J.; Gessner, U.; Klein, I.; Yesou, H.; Lai, X.; Oppelt, N.; Kuenzer, C. Analyzing Water Dynamics Based on Sentinel-1 Time Series—a Study for Dongting Lake Wetlands in China. Remote Sens. 2020, 12, 1761. [Google Scholar] [CrossRef]
- O’Grady, D.; Leblanc, M.; Gillieson, D. Use of ENVISAT ASAR Global Monitoring Mode to complement optical data in the mapping of rapid broad-scale flooding in Pakistan. Hydrol. Earth Syst. Sci. 2011, 15, 3475–3494. [Google Scholar] [CrossRef] [Green Version]
- Manjusree, P.; Kumar, L.; Bhatt, C.M.; Rao, G.S.; Bhanumurthy, V. Optimization of threshold ranges for rapid flood inundation mapping by evaluating backscatter profiles of high incidence angle SAR images. Int. J. Disaster Risk Sci. 2012, 3, 113–122. [Google Scholar] [CrossRef] [Green Version]
- White, L.; Brisco, B.; Pregitzer, M.; Tedford, B.; Boychuk, L. RADARSAT-2 Beam Mode Selection for Surface Water and Flooded Vegetation Mapping. Can. J. Remote Sens. 2014, 40, 135–151. [Google Scholar] [CrossRef]
- Li, J.; Wang, S. An automatic method for mapping inland surface waterbodies with Radarsat-2 imagery. Int. J. Remote Sens. 2015, 36, 1367–1384. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Unsupervised Extraction of Flood-Induced Backscatter Changes in SAR Data Using Markov Image Modeling on Irregular Graphs. IEEE Trans. Geosci. Remote Sens. 2011, 49, 251–263. [Google Scholar] [CrossRef]
- Martinis, S.; Plank, S.; Ćwik, K. The Use of Sentinel-1 Time-Series Data to Improve Flood Monitoring in Arid Areas. Remote Sens. 2018, 10, 583. [Google Scholar] [CrossRef] [Green Version]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.-P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sens. 2018, 10, 217. [Google Scholar] [CrossRef] [Green Version]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A Hierarchical Split-Based Approach for Parametric Thresholding of SAR Images: Flood Inundation as a Test Case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Senthilnath, J.; Shenoy, H.V.; Rajendra, R.; Omkar, S.N.; Mani, V.; Diwakar, P.G. Integration of speckle de-noising and image segmentation using Synthetic Aperture Radar image for flood extent extraction. J. Earth Syst. Sci. 2013, 122, 559–572. [Google Scholar] [CrossRef] [Green Version]
- Hornacek, M.; Wagner, W.; Sabel, D.; Truong, H.-L.; Snoeij, P.; Hahmann, T.; Diedrich, E.; Doubkova, M. Potential for High Resolution Systematic Global Surface Soil Moisture Retrieval via Change Detection Using Sentinel. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1303–1311. [Google Scholar] [CrossRef]
- Martinez, J.-M.; Le Toan, T. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Dedieu, G. Assessing the robustness of Random Forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Masse, A. Product User Manual: Water Bodies Sentinel-2 100M v1, Copernicus Global Land Operations—Cryosphere and Water, CGLOPS-2. Available online: https://land.copernicus.eu/global/sites/cgls.vito.be/files/products/CGLOPS2_PUM_WB100m_V1_I1.10.pdf (accessed on 9 August 2021).
- Sentinel-2 User Handbook. Available online: https://sentinels.copernicus.eu/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 9 August 2021).
- Sentinel-2 ESA Special Publication. Available online: https://sentinel.esa.int/documents/247904/349490/S2_SP-1322_2.pdf (accessed on 9 August 2021).
- Sentinel-2 ESA—Revisit and Coverage. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/sentinel-2-msi/revisit-coverage (accessed on 9 August 2021).
- Rouquié, B.; Hagolle, O.; Bréon, F.-M.; Boucher, O.; Desjardins, C.; Rémy, S. Using Copernicus Atmosphere Monitoring Service Products to Constrain the Aerosol Type in the Atmospheric Correction Processor MAJA. Remote Sens. 2017, 9, 1230. [Google Scholar] [CrossRef] [Green Version]
- Baetens, L.; Desjardins, C.; Hagolle, O. Validation of Copernicus Sentinel-2 Cloud Masks Obtained from MAJA, Sen2Cor, and FMask Processors Using Reference Cloud Masks Generated with a Supervised Active Learning Procedure. Remote Sens. 2019, 11, 433. [Google Scholar] [CrossRef] [Green Version]
- The Theia Data Center. Available online: https://theia.cnes.fr/atdistrib/rocket/#/search?collection=VENUS (accessed on 21 September 2020).
- Sentinel-1 ESA Special Publication. Available online: https://sentinel.esa.int/documents/247904/349449/S1_SP-1322_1.pdf (accessed on 9 August 2021).
- Nobre, A.; Cuartas, L.; Hodnett, M.; Rennó, C.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Yamazaki, D.; Ikeshima, D.; Sosa, J.; Bates, P.D.; Allen, G.H.; Pavelsky, T.M. MERIT Hydro: A High-Resolution Global Hydrography Map Based on Latest Topography Dataset. Water Resour. Res. 2019, 55, 5053–5073. [Google Scholar] [CrossRef] [Green Version]
- Dozier, J. Spectral signature of alpine snow cover from the Landsat thematic mapper. Remote Sens. Environ. 1989, 28, 9–22. [Google Scholar] [CrossRef]
- Khan, J.U.; Ansary, N.; Durand, F.; Testut, L.; Ishaque, M.; Calmant, S.; Krien, Y.; Islam, A.S.; Papa, F. High-Resolution Intertidal Topography from Sentinel-2 Multi-Spectral Imagery: Synergy between Remote Sensing and Numerical Modeling. Remote Sens. 2019, 11, 2888. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Xie, S.; Zhang, X.; Chen, C.; Guo, H.; Du, J.; Duan, Z. A robust Multi-Band Water Index (MBWI) for automated extraction of surface water from Landsat 8 OLI imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 68, 73–91. [Google Scholar] [CrossRef]
- Koleck, T. S1Tiling Chain—Ortho-Rectification of Sentinel-1 Data on Sentinel-2 Grid. Available online: https://gitlab.orfeo-toolbox.org/s1-tiling/s1tiling (accessed on 9 August 2021).
- Grizonnet, M.; Michel, J.; Poughon, V.; Inglada, J.; Savinaud, M.; Cresson, R. Orfeo ToolBox: Open-source processing of remote sensing images. Open Geospat. Data Softw. Stand. 2017, 2, 15. [Google Scholar] [CrossRef] [Green Version]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- NASA Shuttle Radar Topography Mission. Available online: http://www2.jpl.nasa.gov/srtm/ (accessed on 9 August 2021).
- Pena Luque Santiago, 2019. CNES ALCD Open Water Masks (Version 1.1): Zenodo. Available online: https://zenodo.org/record/3675333#.YR4dmd8RWUk (accessed on 9 August 2021).
- Wessel, P.; Smith, W.H.F. A global, self-consistent, hierarchical, high-resolution shoreline database. J. Geophys. Res. Space Phys. 1996, 101, 8741–8743. [Google Scholar] [CrossRef] [Green Version]
- Sandre; OFB; IGN. BD Topage: French Hydrographic Database. Available online: https://geo.data.gouv.fr/en/datasets/237d2617f3377a6b74187a17adc83ee948619b9e (accessed on 9 August 2021).
- Catry, T.; Li, Z.; Roux, E.; Herbreteau, V.; Gurgel, H.; Mangeas, M.; Seyler, F.; Dessay, N. Wetlands and Malaria in the Amazon: Guidelines for the Use of Synthetic Aperture Radar Remote-Sensing. Int. J. Environ. Res. Public Health 2018, 15, 468. [Google Scholar] [CrossRef] [Green Version]
- Biswas, N.K.; Hossain, F.; Bonnema, M.; Lee, H.; Chishtie, F. Towards a global Reservoir Assessment Tool for predicting hydrologic impacts and operating patterns of existing and planned reservoirs. Environ. Model. Softw. 2021, 140, 105043. [Google Scholar] [CrossRef]
- Rättich, M.; Martinis, S.; Wieland, M. Automatic Flood Duration Estimation Based on Multi-Sensor Satellite Data. Remote Sens. 2020, 12, 643. [Google Scholar] [CrossRef] [Green Version]
- Eyler, B. Mekong Dam Monitor: Methods and Processes. Available online: https://www.stimson.org/2020/mekong-dam-monitor-methods-and-processes/ (accessed on 9 August 2021).
- Yang, X.; Qin, Q.; Grussenmeyer, P.; Koehl, M. Urban surface water body detection with suppressed built-up noise based on water indices from Sentinel-2 MSI imagery. Remote Sens. Environ. 2018, 219, 259–270. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M. Estimation of the sunglint radiance field from optical satellite imagery over open ocean: Multidirectional approach and polarization aspects. J. Geophys. Res. Ocean. 2013, 118, 76–90. [Google Scholar] [CrossRef] [Green Version]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Slagter, B.; Tsendbazar, N.-E.; Vollrath, A.; Reiche, J. Mapping wetland characteristics using temporally dense Sentinel-1 and Sentinel-2 data: A case study in the St. Lucia wetlands, South Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102009. [Google Scholar] [CrossRef]
- Alaska Satellite Facility. Sentinel-1 Data Coverage Heat Maps. Available online: https://asf.alaska.edu/data-sets/sar-data-sets/sentinel-1/sentinel-1-acquisition-maps/ (accessed on 9 August 2021).
- Cooley, S.W.; Ryan, J.C.; Smith, L.C. Human alteration of global surface water storage variability. Nat. Cell Biol. 2021, 591, 78–81. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT Mission and Its Capabilities for Land Hydrology. Surv. Geophys. 2016, 37, 307–337. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
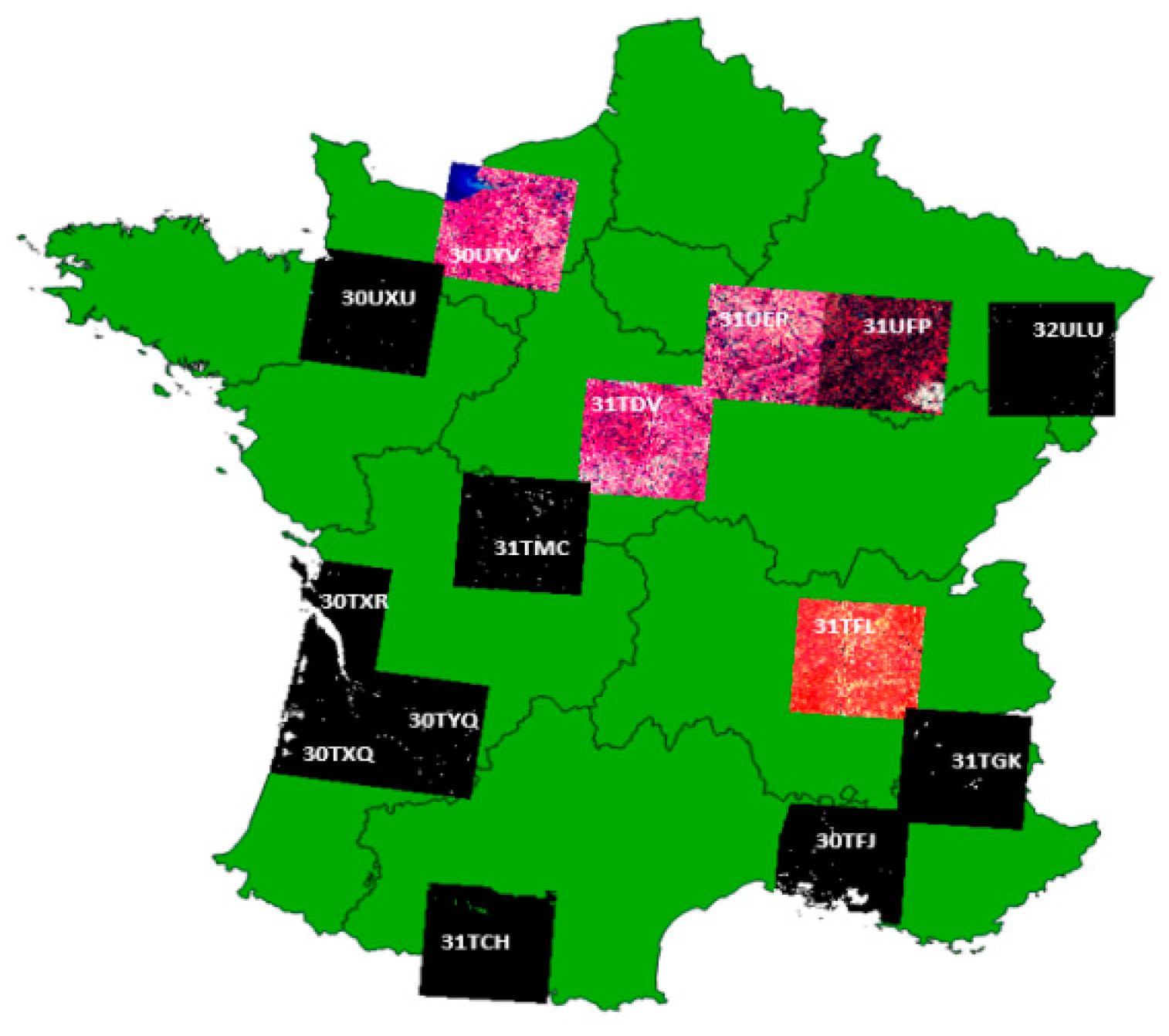
| Region | Tile | Dates | Water Area Km2 (%) | Scene Content |
|---|---|---|---|---|
| Alpes 1 | 31TGK | 24 February 2019 | 37.85 (0.31%) | Snow, Mountain |
| Alpes 2 | 31TGL | 28 August 2018 | 125.04 (1.03%) | Mountain |
| Alsace | 32ULU | 12 September 2018 | 83.78 (0.69%) | Lowlands, Slopes |
| 21 Mars 2019 | 100.14 (0.83%) | Snow, Lowlands, Slopes | ||
| Ardèche | 31TFL | 17 February 2019 | 122.75 (1.01%) | Snow, Lowland, Slopes |
| 24 Mars 2019 | 119.75 (0.98%) | Lowlands, Slopes | ||
| 20 September 2019 | 109.15 (0.90%) | - 1 | ||
| Ariège | 30TCH | 23 October 2018 | 39.94 (0.34%) | Mountains |
| 22 Mars 2019 | 31.42 (0.26%) | Snow, Mountains | ||
| Bordeaux | 30TXQ | 11 September 2018 | 187.36 (2.51%) | Coast, turbid/clear water |
| 23 February 2019 | 184.40 (2.47%) | - | ||
| Bretagne | 30UXU | 23 February 2019 | 54.93 (0.46%) | Wetlands, small bodies |
| 08 July 2018 | 39.94 (0.34%) | - | ||
| Camargue | 31TFJ | 27 September 2018 | 415.6 (4.14%) | Coast, large water bodies |
| 31 Mars 2019 | 489.11 (4.71%) | - | ||
| Chateauroux | 31TCM | 19 August 2018 | 133.5 (1.1%) | Lowlands |
| 25 February 2019 | 121.24 (1.0%) | - | ||
| Gironde | 30TXR | 23 February 2019 | 92.63 (1.37%) | Delta, turbid/clear water |
| Havre | 30UYV | 24 Mars 2020 | 85.91 (8.17%) | Delta, lowlands |
| Marmande | 30TYQ | 22 February 2019 | 95.33 (0.79%) | Wetlands, small bodies |
| Der Lake region | 31UFP | 10 July 2019 | 173.5 (0.85%) | Lowlands/gentle slopes |
| 04 December 2019 | 45.38 (0.37%) | - | ||
| 29 December 2019 | 121.86 (1.01%) | Flood | ||
| Orient Lake region | 31UEP | 17 July 2019 | 106.47 (0.88%) | Lowlands/gentle slopes |
| 04 December 2019 | 41.27 (0.37%) | - | ||
| 29 December 2019 | 81.65 (0.67%) | Flood | ||
| Total | 3239.90 (1.36%)—238,126 total surface |
| Geomorphological Index | Saint Géraud | Tordre | Pareloup | Salagou |
|---|---|---|---|---|
| Eroded Area Index | 0.35 | 0.66 | 0.78 | 0.85 |
| Eroded Perimeter Index | 0.68 | 0.81 | 0.88 | 0.95 |
| Convex Area Index | 0.21 | 0.72 | 0.35 | 0.619 |
| Convex Perimeter Index | 0.62 | 0.79 | 0.40 | 0.69 |
| Optical Method | SWIR Filter | F1_Score | Precision | Recall | Accuracy | Failures |
|---|---|---|---|---|---|---|
| Canny-Otsu MNDWI | - | 0.814496 | 0.916422 | 0.826836 | 0.99697 | 7 |
| Canny-Otsu MNDWI | Yes | 0.832646 | 0.92836 | 0.826021 | 0.997206 | 5 |
| HSV | - | 0.7884 | 0.91694 | 0.875777 | 0.996111 | 12 |
| HSV | Yes | 0.810096 | 0.941263 | 0.856648 | 0.996487 | 7 |
| Clustering 2 channels | Yes | 0.888889 | 0.944292 | 0.888526 | 0.997996 | 6 |
| Clustering 3 channels | - | 0.868414 | 0.864012 | 0.933613 | 0.997416 | 7 |
| Clustering 3 channels | Yes | 0.890239 | 0.893692 | 0.917815 | 0.997814 | 4 |
| Clustering 4 channels | Yes | 0.886854 | 0.925346 | 0.886162 | 0.997939 | 6 |
| Radar Method | Lee Filter -Size | Regularization -Ball Radius | F1_Score | Precision | Recall | Accuracy | Failures |
|---|---|---|---|---|---|---|---|
| Random Forest | No | 1 | 0.681 | 0.667 | 0.716 | 0.995 | 14 |
| Random Forest | 3 × 3 | 1 | 0.689 | 0.674 | 0.723 | 0.995 | 20 |
| Random Forest | No | 2 | 0.727 | 0.787 | 0.710 | 0.996 | 8 |
| Average | Max | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Method | F1_Score | Precision | Recall | Accuracy | Failures | F1_Score | Precision | Recall | Accuracy | Failures |
| Radar 1 day | 0.727 | 0.787 | 0.710 | 0.9962 | 8 | 0.727 | 0.787 | 0.710 | 0.996 | 8 |
| Radar 5 days | 0.744 | 0.789 | 0.756 | 0.996 | 1 | 0.705 | 0.669 | 0.784 | 0.995 | 3 |
| Radar 10 days | 0.795 | 0.887 | 0.754 | 0.9970 | 3 | 0.672 | 0.584 | 0.810 | 0.994 | 9 |
| Radar 15 days | 0.793 | 0.890 | 0.755 | 0.9970 | 3 | 0.588 | 0.492 | 0.844 | 0.993 | 23 |
| Radar 20 days | 0.797 | 0.894 | 0.752 | 0.9972 | 2 | 0.565 | 0.424 | 0.862 | 0.992 | 33 |
| Radar 30 days | 0.802 | 0.907 | 0.746 | 0.9973 | 2 | 0.508 | 0.386 | 0.869 | 0.990 | 46 |
| Optical 1 day | 0.890 | 0.893 | 0.917 | 0.9978 | 4 | 0.890 | 0.893 | 0.917 | 0.9978 | 4 |
| Optical 5 days | 0.896 | 0.906 | 0.895 | 0.9979 | 9 | 0.894 | 0.870 | 0.930 | 0.9978 | 7 |
| Optical 10 days | 0.899 | 0.889 | 0.903 | 0.9980 | 10 | 0.883 | 0.834 | 0.936 | 0.9975 | 9 |
| Optical 15 days | 0.901 | 0.903 | 0.904 | 0.9978 | 10 | 0.857 | 0.786 | 0.942 | 0.9966 | 10 |
| Optical 20 days | 0.886 | 0.885 | 0.915 | 0.9977 | 7 | 0.846 | 0.767 | 0.960 | 0.9963 | 18 |
| Optical 30 days | 0.889 | 0.899 | 0.894 | 0.9981 | 7 | 0.824 | 0.740 | 0.953 | 0.9964 | 14 |
| Large Scene Evaluation | Reservoir Area Evaluation | ||||
|---|---|---|---|---|---|
| Optical | Radar | Optical | Radar | ||
| Multiple-dates Method Effect | “Average” logic | Neutral | Very Positive | Positive | Positive |
| “Maximum” logic | Negative | Negative | Positive | Very Positive | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peña-Luque, S.; Ferrant, S.; Cordeiro, M.C.R.; Ledauphin, T.; Maxant, J.; Martinez, J.-M. Sentinel-1&2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level. Remote Sens. 2021, 13, 3279. https://doi.org/10.3390/rs13163279
Peña-Luque S, Ferrant S, Cordeiro MCR, Ledauphin T, Maxant J, Martinez J-M. Sentinel-1&2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level. Remote Sensing. 2021; 13(16):3279. https://doi.org/10.3390/rs13163279
Chicago/Turabian StylePeña-Luque, Santiago, Sylvain Ferrant, Mauricio C. R. Cordeiro, Thomas Ledauphin, Jerome Maxant, and Jean-Michel Martinez. 2021. "Sentinel-1&2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level" Remote Sensing 13, no. 16: 3279. https://doi.org/10.3390/rs13163279
APA StylePeña-Luque, S., Ferrant, S., Cordeiro, M. C. R., Ledauphin, T., Maxant, J., & Martinez, J.-M. (2021). Sentinel-1&2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level. Remote Sensing, 13(16), 3279. https://doi.org/10.3390/rs13163279