
Large Area High-Resolution 3D Mapping of Oxia Planum: The Landing Site for the ExoMars Rosalind Franklin Rover





Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of MADNet and Training Details
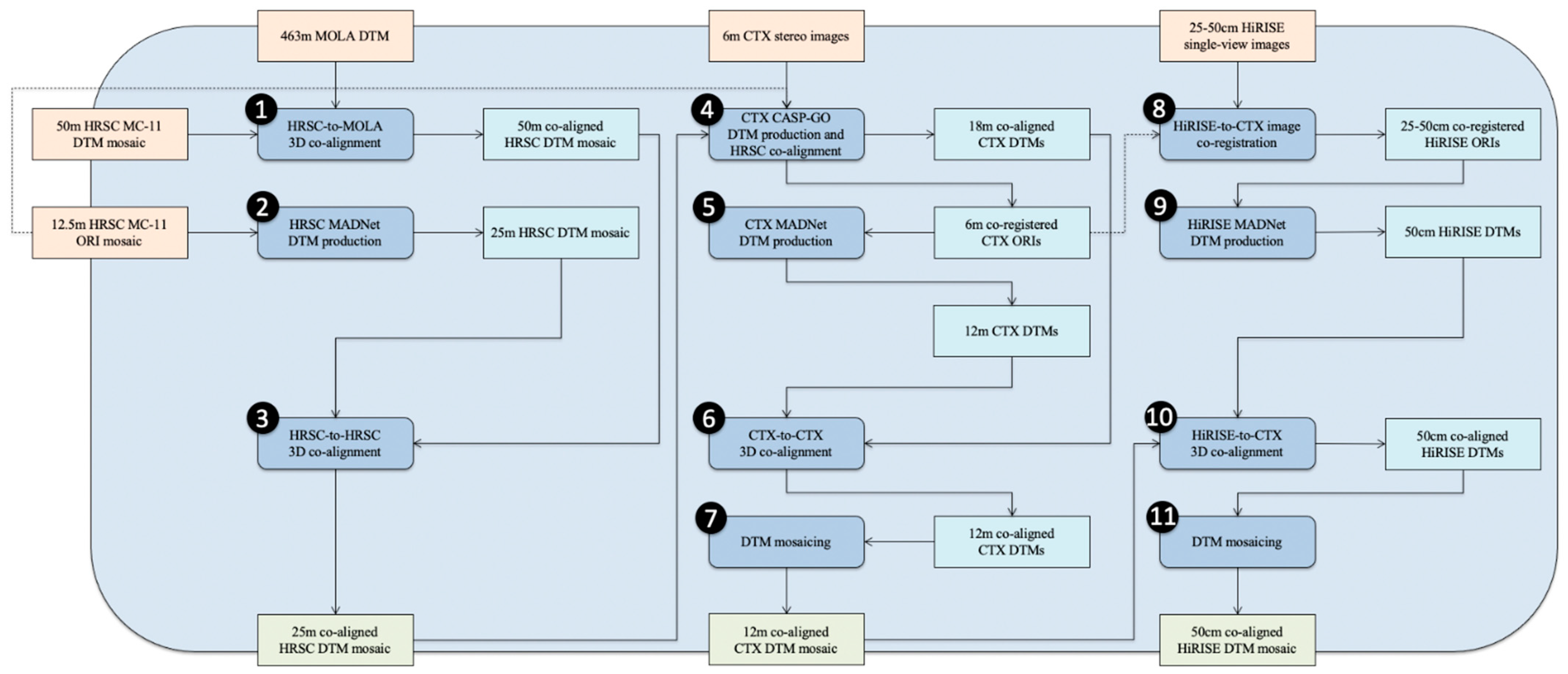
2.2. Overall Processing Chain
- (1)
- B-spline fitting based on 3D co-alignment of the input (cropped) HRSC MC-11W level 5 DTM mosaic with respect to the input MOLA DTM to obtain an intermediate 50 m/pixel MOLA corrected HRSC DTM mosaic.
- (2)
- MADNet DTM production, using the cropped HRSC MC-11W level 5 ORI mosaic as input to produce an intermediate 25 m/pixel HRSC DTM mosaic.
- (3)
- 3D co-alignment of the intermediate 25 m/pixel HRSC DTM mosaic from step (2) and the intermediate 50 m/pixel MOLA-co-aligned HRSC DTM mosaic from step (1), to produce the 25 m/pixel MOLA-co-aligned HRSC DTM mosaic, which is the first of the three final products of this work.
- (4)
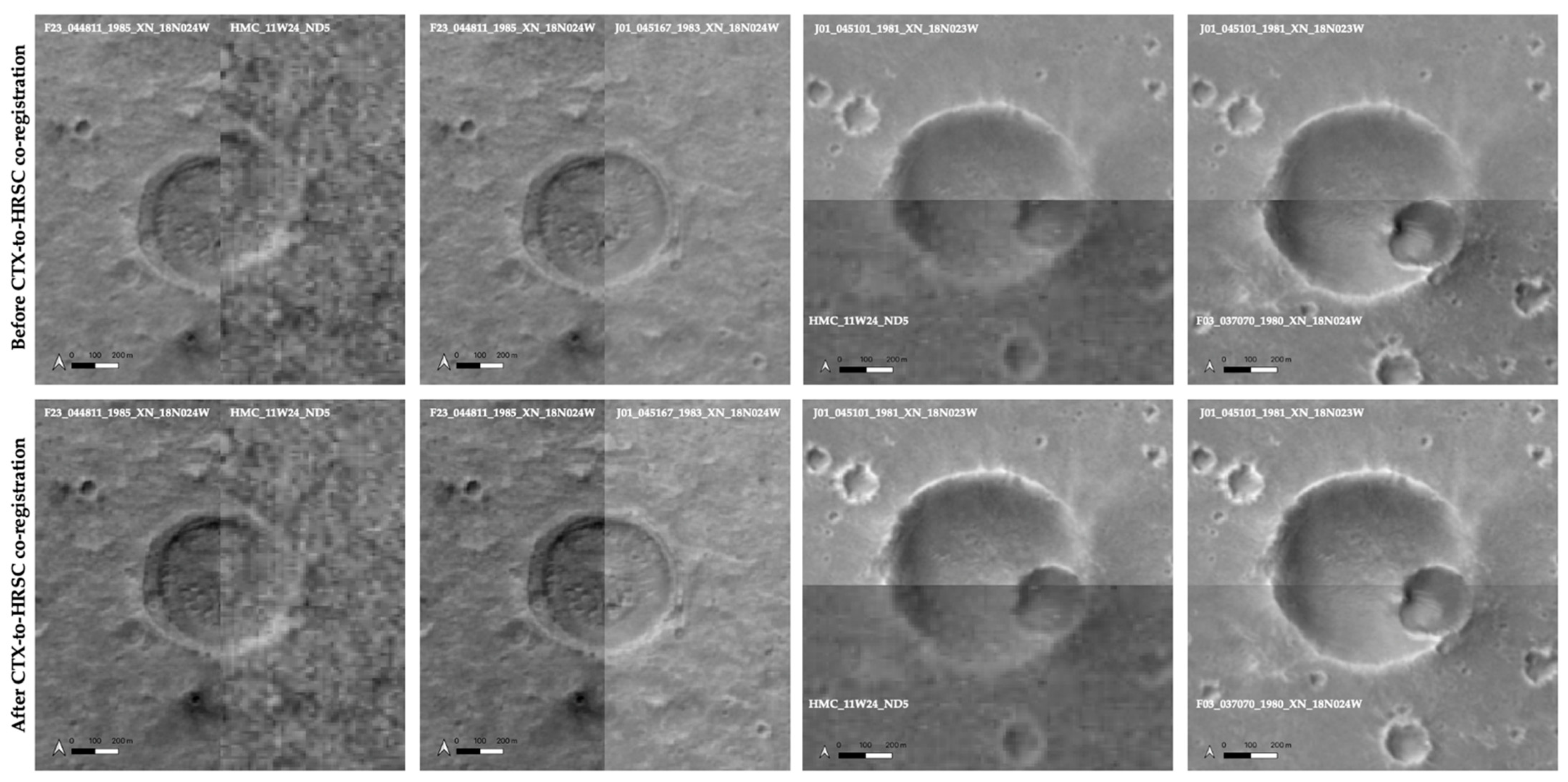
- CASP-GO [6,10,40] photogrammetric DTM production of CTX serendipitous “stereo” images to produce 18 m/pixel CTX DTMs, which are co-aligned with the 25 m/pixel MOLA-co-aligned HRSC DTM mosaic from step (3), as well as 6 m/pixel CTX ORIs, which are co-registered with the input 12.5 m/pixel HRSC MC-11W level 5 ORI mosaic.
- (5)
- MADNet DTM production using the intermediate 6 m/pixel HRSC-co-registered CTX ORIs from step (4) to produce intermediate 12 m/pixel CTX DTMs.
- (6)
- 3D co-alignment of the intermediate 12 m/pixel CTX DTMs from step (5) and the 18 m/pixel HRSC-co-aligned CTX DTMs from step (4) to produce 12 m/pixel HRSC-co-aligned CTX DTMs.
- (7)
- DTM mosaicing (using the ASP [40] “dem_mosaic” function) of the 12 m/pixel HRSC-co-aligned CTX DTMs from step (6) to produce a 12 m/pixel HRSC-co-aligned CTX DTM mosaic, which is the second of the three final products of this work.
- (8)
- (9)
- MADNet DTM production using the CTX-co-registered HiRISE images from step (8) to produce intermediate 50 cm/pixel HiRISE DTMs.
- (10)
- 3D co-alignment of the intermediate 50 cm/pixel HiRISE DTMs from step (9) and the 12 m/pixel HRSC-co-aligned CTX DTM mosaic from step (7) to produce CTX-co-aligned 50 cm/pixel HiRISE DTMs.
- (11)
- DTM mosaicing of the 50 cm/pixel CTX-co-aligned HiRISE DTMs from step (10) to produce a 50 cm/pixel CTX-co-aligned HiRISE DTM mosaic, which is the third of the three final products of this work.
2.3. Practical Issues and Solutions
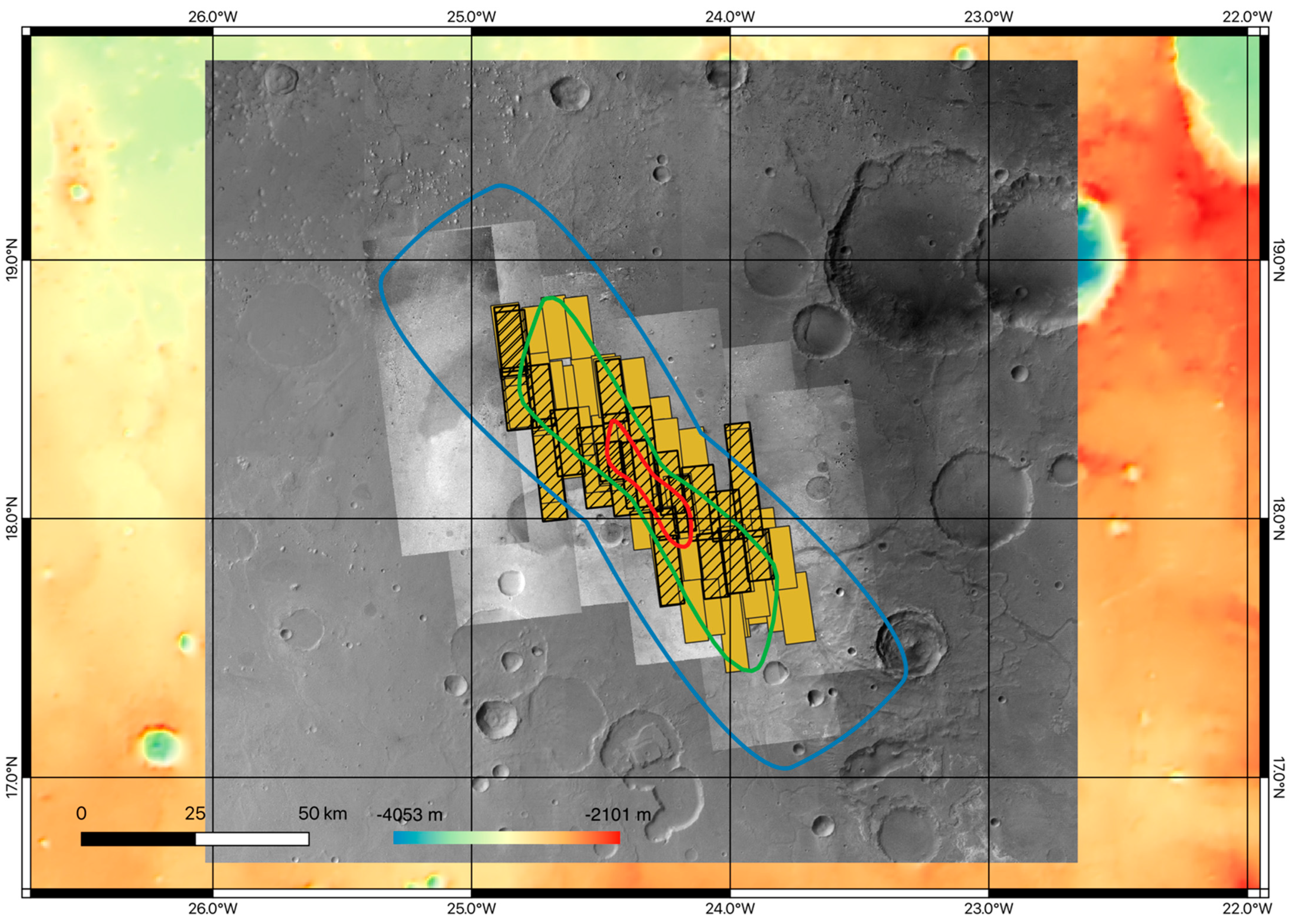
2.4. Study Site
3. Results
- (1)
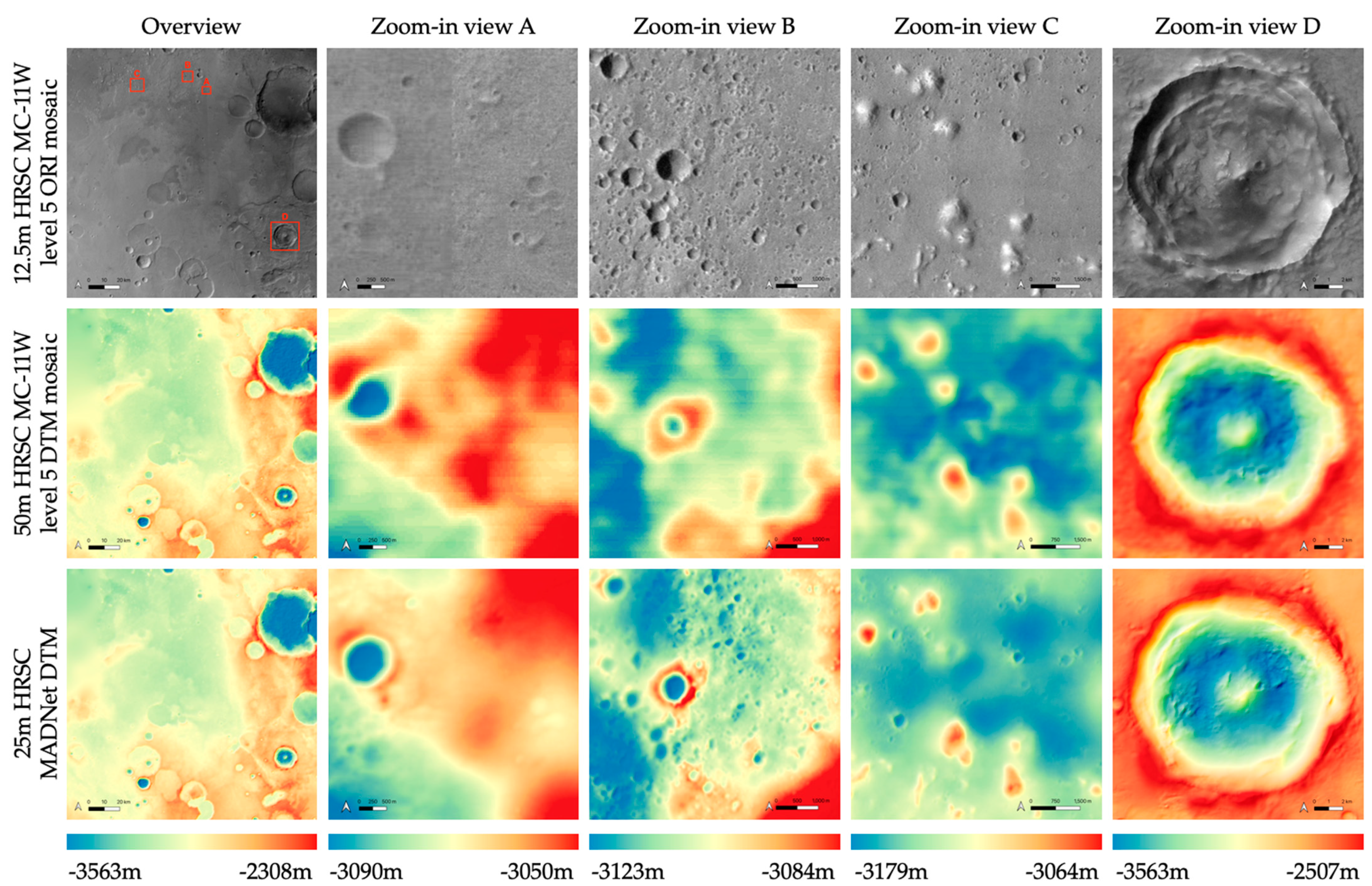
- The 25 m/pixel HRSC MADNet DTM mosaic (3D co-aligned with the 463 m/pixel MOLA DTM) covering an area of about 197 km × 182 km of the landing site.
- (2)
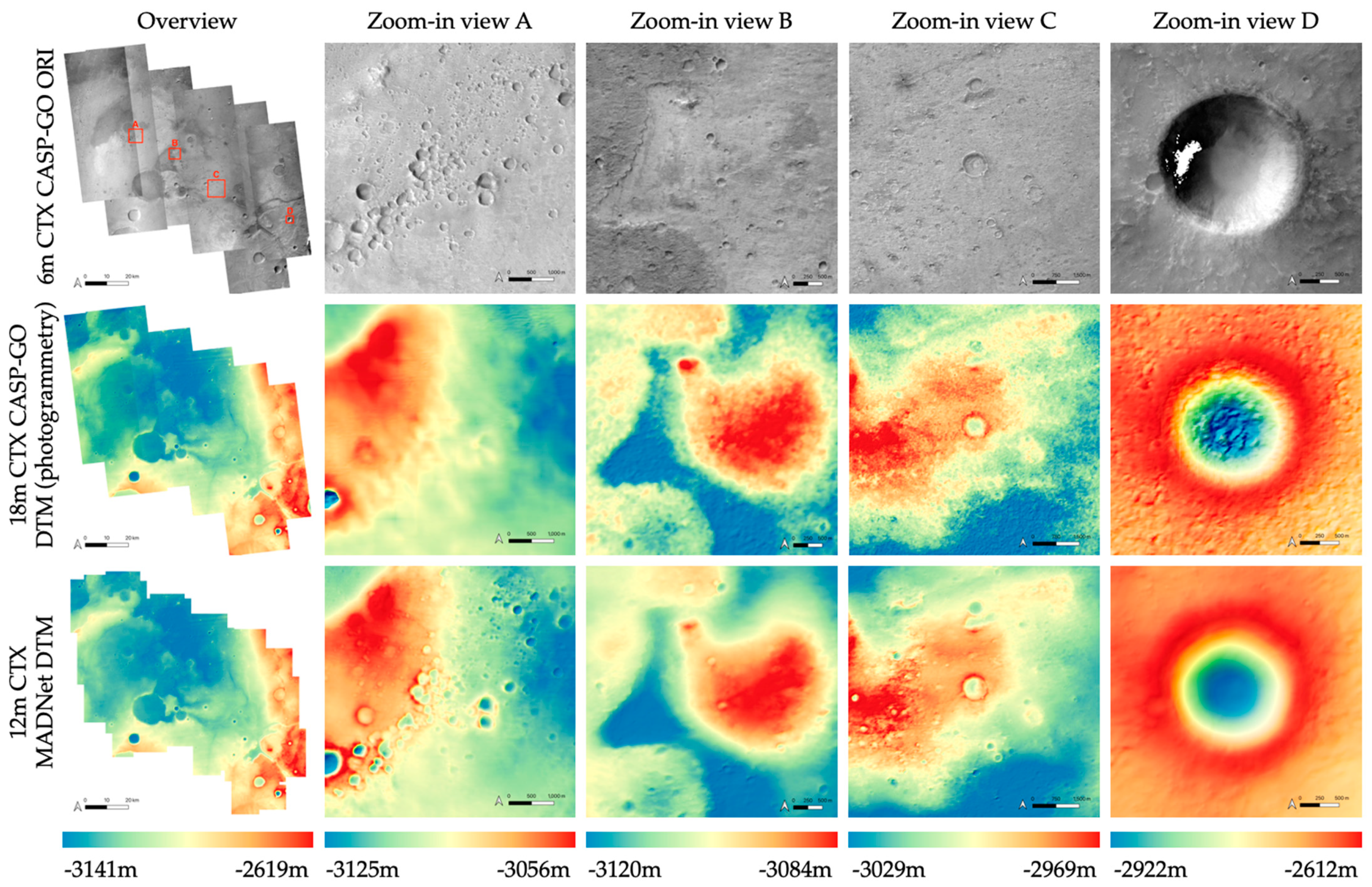
- The 12 m/pixel CTX MADNet DTM mosaic (3D co-aligned with the 25 m/pixel HRSC MADNet DTM mosaic) and 6 m/pixel CTX ORIs (co-registered with the 12.5 m/pixel HRSC MC-11W level 5 ORI mosaic — “HMC_11W24_nd5”), covering an area of about 114 km × 117 km of the landing site.
- (3)
- The 50 cm/pixel HiRISE MADNet DTM mosaic (3D co-aligned with the 12 m/pixel CTX MADNet DTM mosaic) and 25 cm/pixel HiRISE ORIs (co-registered with the 6 m/pixel CTX ORIs), covering about a 74.3 km × 86.3 km area of the 3-sigma landing ellipses and part of the ExoMars team’s geological characterisation area [33].
3.1. HRSC Results
3.2. CTX Results
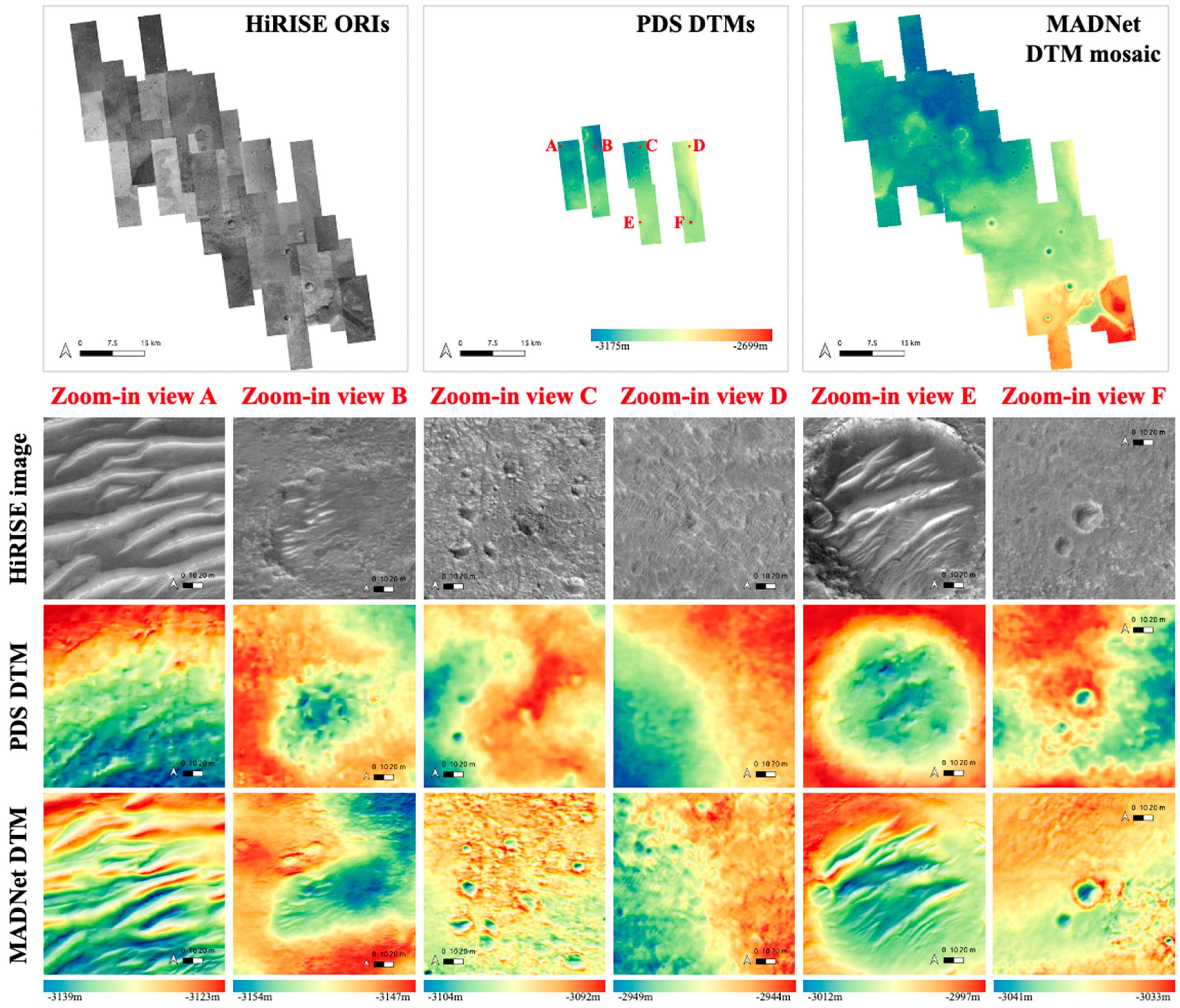
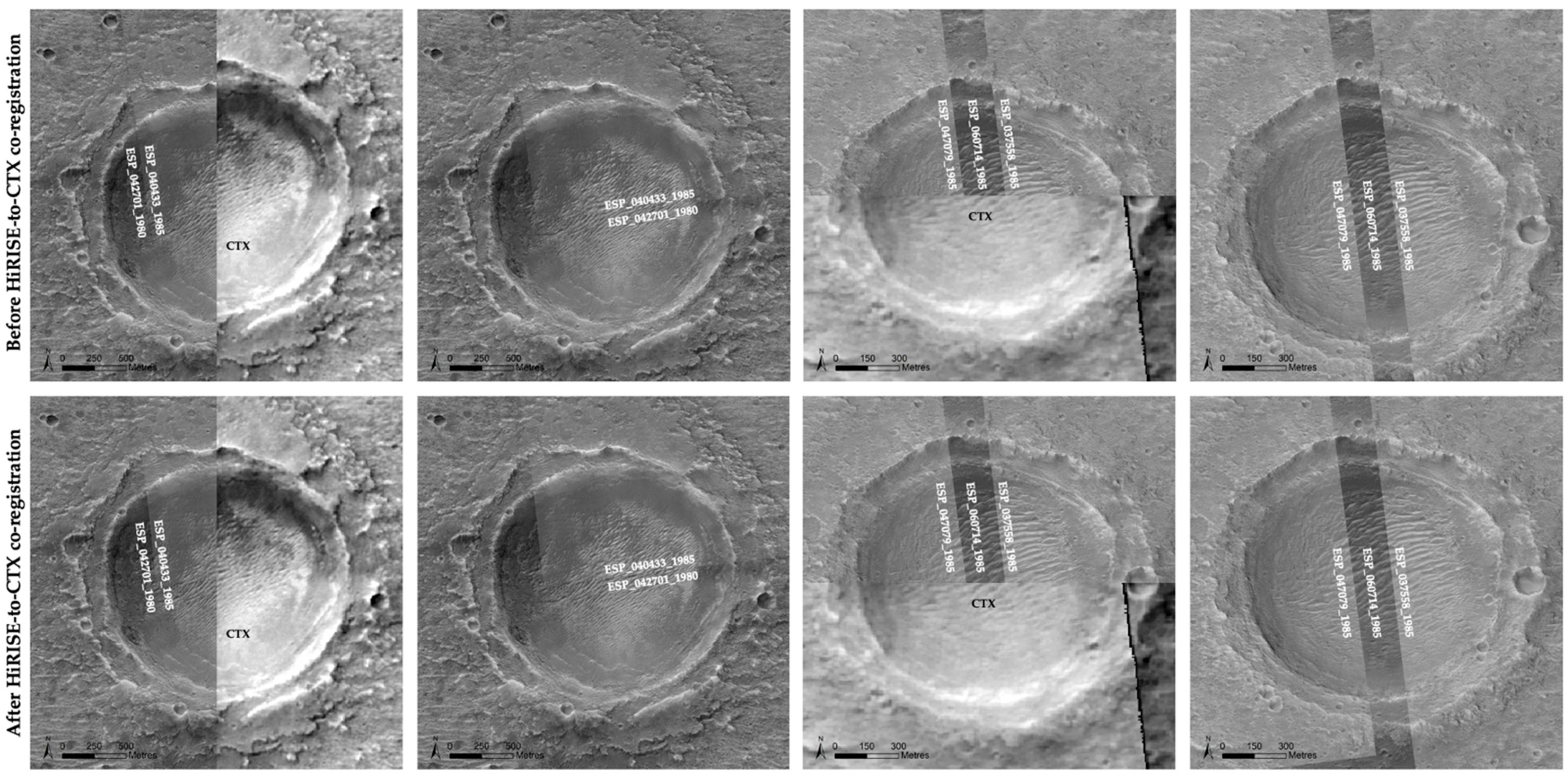
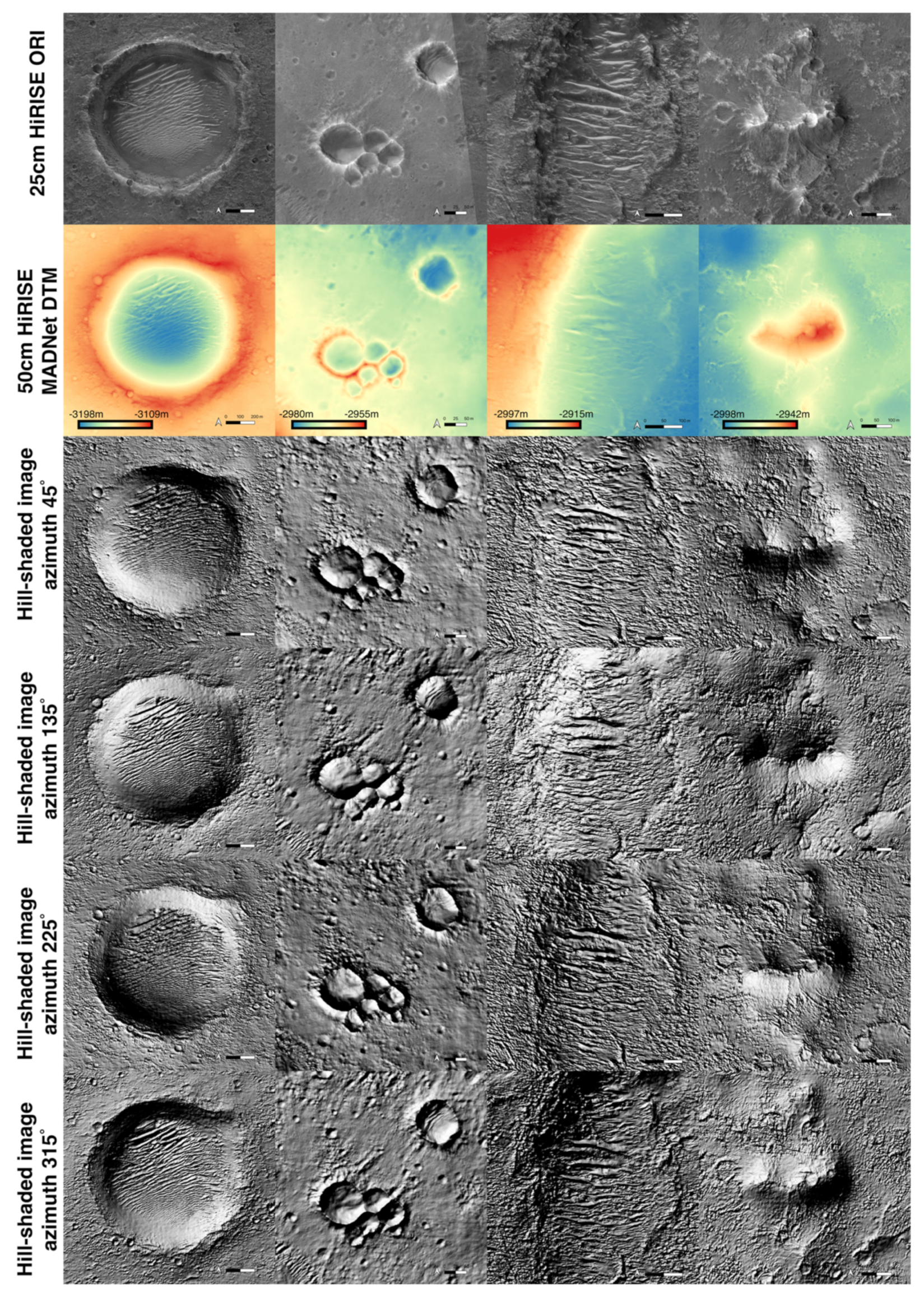
3.3. HiRISE Results
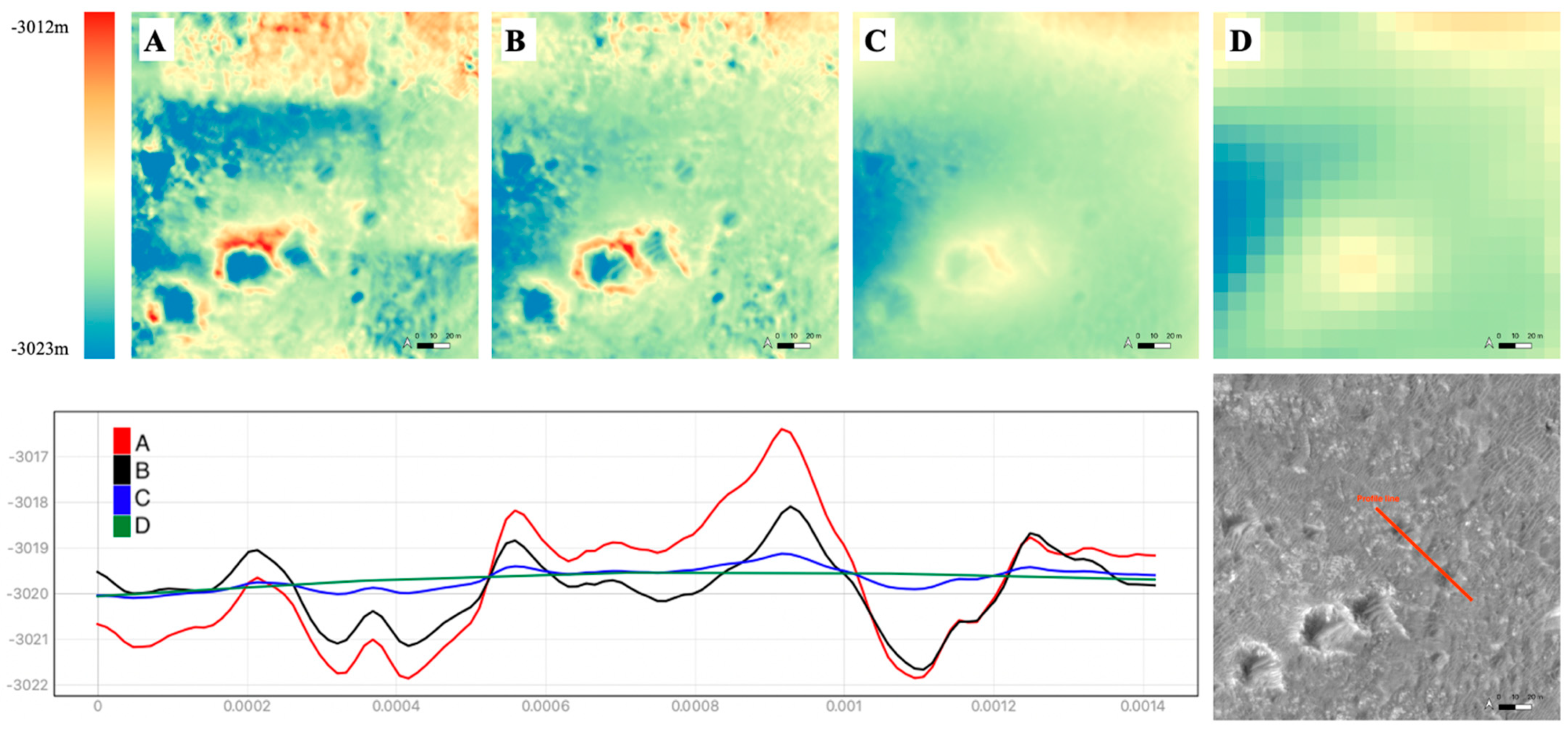
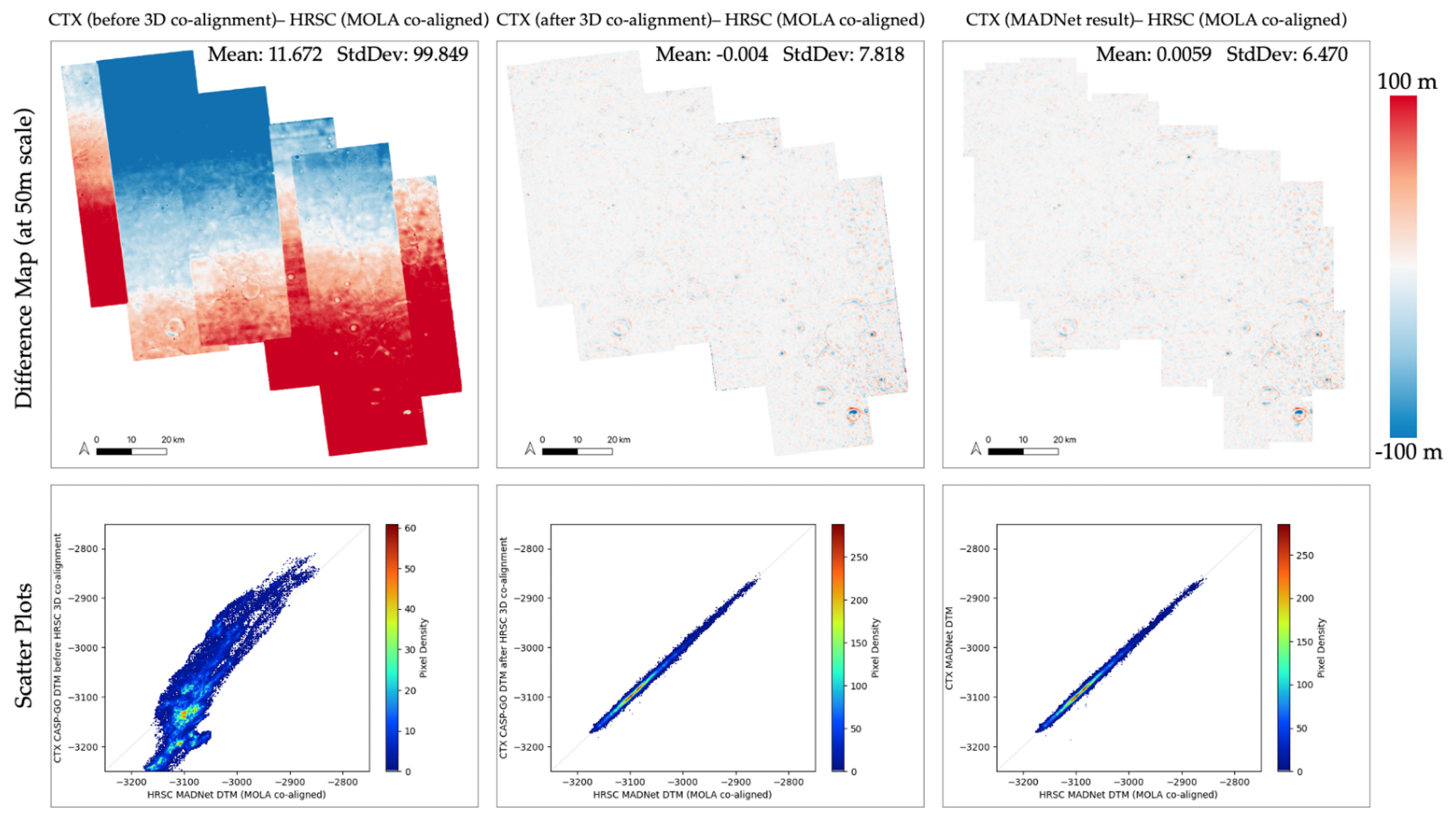
3.4. Additional Assessments for the Resultant HiRISE and CTX MADNet DTM Mosaics
4. Discussion
4.1. Product Access
4.2. Extensibility with Other Satasets or Area
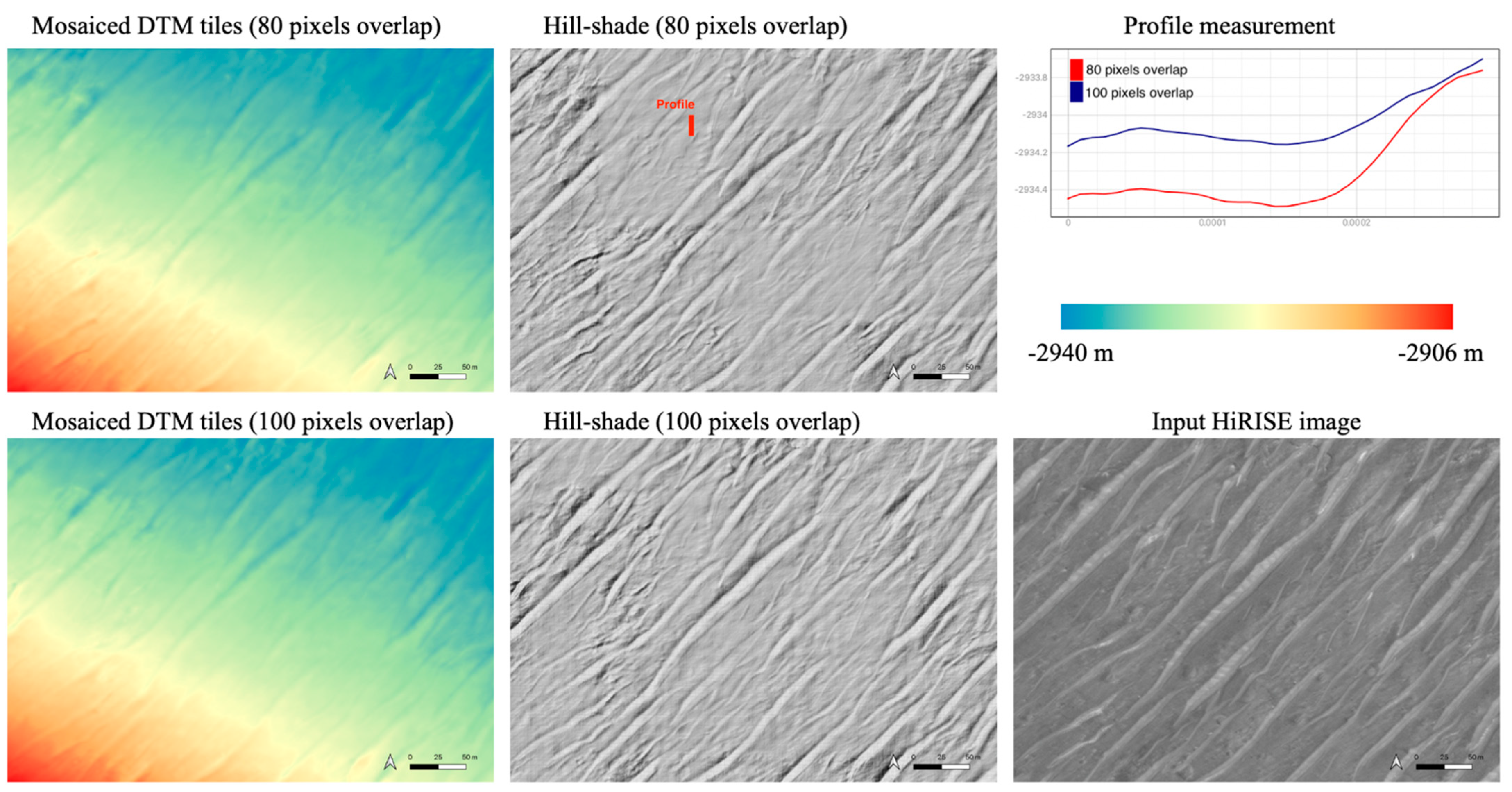
4.3. Known Artefact
4.4. Limitations and Future Work
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Neukum, G.; Jaumann, R. HRSC: The high resolution stereo camera of Mars Express. Sci. Payload 2004, 1240, 17–35. [Google Scholar]
- Gwinner, K.; Scholten, F.; Preusker, F.; Elgner, S.; Roatsch, T.; Spiegel, M.; Schmidt, R.; Oberst, J.; Jaumann, R.; Heipke, C. Topography of Mars from global mapping by HRSC high-resolution digital terrain models and orthoimages: Characteristics and performance. Earth Planet. Sci. Lett. 2010, 294, 506–519. [Google Scholar] [CrossRef]
- Gwinner, K.; Jaumann, R.; Hauber, E.; Hoffmann, H.; Heipke, C.; Oberst, J.; Neukum, G.; Ansan, V.; Bostelmann, J.; Dumke, A.; et al. The High Resolution Stereo Camera (HRSC) of Mars Express and its approach to science analysis and mapping for Mars and its satellites. Planet. Space Sci. 2016, 126, 93–138. [Google Scholar] [CrossRef]
- Gwinner, K.; Scholten, F.; Spiegel, M.; Schmidt, R.; Giese, B.; Oberst, J.; Heipke, C.; Jaumann, R.; Neukum, G. Derivation and validation of high-resolution digital terrain models from Mars Express HRSC data. Photogramm. Eng. Remote. Sens. 2009, 75, 1127–1142. [Google Scholar] [CrossRef] [Green Version]
- O’Hara, R.; Barnes, D. A new shape from shading technique with application to Mars Express HRSC images. ISPRS J. Photogramm. Remote. Sens. 2012, 67, 27–34. [Google Scholar] [CrossRef]
- Tao, Y.; Michael, G.; Muller, J.P.; Conway, S.J.; Putri, A.R. Seamless 3 D Image Mapping and Mosaicing of Valles Marineris on Mars Using Orbital HRSC Stereo and Panchromatic Images. Remote. Sens. 2021, 13, 1385. [Google Scholar] [CrossRef]
- Putri, A.R.D.; Sidiropoulos, P.; Muller, J.P.; Walter, S.H.; Michael, G.G. A new south polar digital terrain model of Mars from the High-Resolution Stereo Camera (HRSC) onboard the ESA Mars Express. Planet. Space Sci. 2019, 174, 43–55. [Google Scholar] [CrossRef]
- Malin, M.C.; Bell, J.F.; Cantor, B.A.; Caplinger, M.A.; Calvin, W.M.; Clancy, R.T.; Edgett, K.S.; Edwards, L.; Haberle, R.M.; James, P.B.; et al. Context camera investigation on board the Mars Reconnaissance Orbiter. J. Geophys. Res. Space Phys. 2007, 112, 112. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wu, B. Investigation of boresight offsets and co-registration of HiRISE and CTX imagery for precision Mars topographic mapping. Planet. Space Sci. 2017, 139, 18–30. [Google Scholar] [CrossRef]
- Tao, Y.; Muller, J.P.; Sidiropoulos, P.; Xiong, S.T.; Putri, A.R.D.; Walter, S.H.G.; Veitch-Michaelis, J.; Yershov, V. Massive stereo-based DTM production for Mars on cloud computers. Planet. Space Sci. 2018, 154, 30–58. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, B.; Liu, W.C. Mars3DNet: CNN-Based High-Resolution 3D Reconstruction of the Martian Surface from Single Images. Remote. Sens. 2021, 13, 839. [Google Scholar] [CrossRef]
- McEwen, A.S.; Eliason, E.M.; Bergstrom, J.W.; Bridges, N.T.; Hansen, C.J.; Delamere, W.A.; Grant, J.A.; Gulick, V.C.; Herkenhoff, K.E.; Keszthelyi, L.; et al. Mars reconnaissance orbiter’s high resolution imaging science experiment (HiRISE). J. Geophys. Res. Space Phys. 2007, 112, E05S02. [Google Scholar] [CrossRef] [Green Version]
- Kirk, R.L.; Howington-Kraus, E.; Rosiek, M.R.; Cook, D.; Anderson, J.; Becker, K.; Archinal, B.A.; Keszthelyi, L.; King, R.; McEwen, A.S.; et al. Ultrahigh resolution topographic mapping of Mars with HiRISE stereo images: Methods and first results. In Proceedings of the Seventh International Conference on Mars, Moscow, Russia, 9 July 2007; p. 3381. [Google Scholar]
- Kim, J.R.; Muller, J.P. Very high resolution stereo DTM extraction and its application to surface roughness estimation over Martian surface. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2008, 37, 993–998. [Google Scholar]
- Kim, J.R.; Muller, J.P. Multi-resolution topographic data extraction from Martian stereo imagery. Planet. Space Sci. 2009, 57, 2095–2112. [Google Scholar] [CrossRef]
- Beyer, R.A.; McEwen, A.S.; Kirk, R.L. Meter-scale slopes of candidate MER landing sites from point photoclinometry. J. Geophys. Res. Planets 2003, 108, E12. [Google Scholar] [CrossRef]
- Douté, S.; Jiang, C. Small-Scale Topographical Characterization of the Martian Surface With In-Orbit Imagery. IEEE Trans. Geosci. Remote. Sens. 2019, 58, 447–460. [Google Scholar] [CrossRef]
- Jiang, C.; Douté, S.; Luo, B.; Zhang, L. Fusion of photogrammetric and photoclinometric information for high-resolution DEMs from Mars in-orbit imagery. ISPRS J. Photogramm. Remote. Sens. 2017, 130, 418–430. [Google Scholar] [CrossRef]
- Hess, M.; Wohlfarth, K.; Grumpe, A.; Wöhler, C.; Ruesch, O.; Wu, B. Atmospherically compensated shape from shading on the martian surface: Towards the perfect digital terrain model of mars. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 1405–1411. [Google Scholar] [CrossRef] [Green Version]
- Hess, M. High Resolution Digital Terrain Model for the Landing Site of the Rosalind Franklin (ExoMars) Rover. Adv. Space Res. 2019, 53, 1735–1767. [Google Scholar]
- Thomas, N.; Cremonese, G.; Ziethe, R.; Gerber, M.; Brändli, M.; Bruno, G.; Erismann, M.; Gambicorti, L.; Gerber, T.; Ghose, K.; et al. The colour and stereo surface imaging system (CaSSIS) for the ExoMars trace gas orbiter. Space Sci. Rev. 2017, 212, 1897–1944. [Google Scholar] [CrossRef] [Green Version]
- Simioni, E.; Re, C.; Mudric, T.; Cremonese, G.; Tulyakov, S.; Petrella, A.; Pommerol, A.; Thomas, N. 3DPD: A photogrammetric pipeline for a PUSH frame stereo cameras. Planet. Space Sci. 2021, 198, 105165. [Google Scholar] [CrossRef]
- Tao, Y.; Douté, S.; Muller, J.P.; Conway, S.J.; Thomas, N.; Cremonese, G. Ultra-High-Resolution 1 m/pixel CaSSIS DTM Using Super-Resolution Restoration and Shape-from-Shading: Demonstration over Oxia Planum on Mars. Remote. Sens. 2021, 13, 2185. [Google Scholar] [CrossRef]
- Tao, Y.; Xiong, S.; Conway, S.J.; Muller, J.-P.; Guimpier, A.; Fawdon, P.; Thomas, N.; Cremonese, G. Rapid Single Image-Based DTM Estimation from ExoMars TGO CaSSIS Images Using Generative Adversarial U-Nets. Remote. Sens. 2021, 13, 2877. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Frey, H.V.; Garvin, J.B.; Head, J.W.; Muhleman, D.O.; Pettengill, G.H.; Phillips, R.J.; Solomon, S.C.; Zwally, H.J.; et al. Mars Orbiter Laser Altimeter—Experiment summary after the first year of global mapping of Mars. J. Geophys. Res. 2001, 106, 23689–23722. [Google Scholar] [CrossRef]
- Neumann, G.A.; Rowlands, D.D.; Lemoine, F.G.; Smith, D.E.; Zuber, M.T. Crossover analysis of Mars Orbiter Laser Altimeter data. J. Geophys. Res. 2001, 106, 23753–23768. [Google Scholar] [CrossRef] [Green Version]
- Albee, A.L.; Arvidson, R.E.; Palluconi, F.; Thorpe, T. Overview of the Mars Global Surveyor mission. J. Geophys. Res. 2001, 106, 23291–23316. [Google Scholar] [CrossRef] [Green Version]
- Quantin-Nataf, C.; Carter, J.; Mandon, L.; Thollot, P.; Balme, M.; Volat, M.; Pan, L.; Loizeau, D.; Millot, C.; Breton, S.; et al. Oxia Planum: The Landing Site for the ExoMars “Rosalind Franklin” Rover Mission: Geological Context and Prelanding Interpretation. Astrobiology 2021, 21, 345–366. [Google Scholar] [CrossRef] [PubMed]
- Favaro, E.A.; Balme, M.R.; Davis, J.M.; Grindrod, P.M.; Fawdon, P.; Barrett, A.M.; Lewis, S.R. The Aeolian Environment of the Landing Site for the ExoMars Rosalind Franklin Rover in Oxia Planum, Mars. J. Geophys. Res. Planets 2021, 126, 2020JE006723. [Google Scholar] [CrossRef]
- Ivanov, M.A.; Slyuta, E.N.; Grishakina, E.A.; Dmitrovskii, A.A. Geomorphological analysis of ExoMars candidate landing site Oxia Planum. Sol. Syst. Res. 2020, 54, 1–14. [Google Scholar] [CrossRef]
- Mandon, L.; Parkes Bowen, A.; Quantin-Nataf, C.; Bridges, J.C.; Carter, J.; Pan, L.; Beck, P.; Dehouck, E.; Volat, M.; Thomas, N.; et al. Morphological and Spectral Diversity of the Clay-Bearing Unit at the ExoMars Landing Site Oxia Planum. Astrobiology 2021, 21, 464–480. [Google Scholar] [CrossRef]
- Calef, F.J., III; Gengl, H.E.; Soliman, T.; Abercrombie, S.P.; Powell, M.W. MMGIS: A Multi-Mission Geographic Information System for in situ Mars Operations. In Proceedings of the Liquid Propulsion Systems Centre 2017, The Woodlands, TX, USA, 20–24 March 2017; Volume XLVIII, p. 2541. [Google Scholar]
- Sefton-Nash, E.; Fawdon, P.; Orgel, C.; Balme, M.; Quantin-Nataf, C.; Volat, M.; Hauber, E.; Adeli, S.; Davis, J.; Grindrod, P.; et al. Exomars RSOWG. Team Mapping of Oxia Planum for The Exomars 2022 Rover-Surface Platform Mission. In Proceedings of the Liquid Propulsion Systems Centre 2021, 19–30 April 2021; Volume 52, p. 1947. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. arXiv 2014, arXiv:1406.2661. [Google Scholar]
- Jolicoeur-Martineau, A. The relativistic discriminator: A key element missing from standard GAN. arXiv 2018, arXiv:1807.00734. [Google Scholar]
- Tao, Y.; Conway, S.J.; Muller, J.-P.; Putri, A.R.D.; Thomas, N.; Cremonese, G. Single Image Super-Resolution Restoration of TGO CaSSIS Colour Images: Demonstration with Perseverance Rover Landing Site and Mars Science Targets. Remote. Sens. 2021, 13, 1777. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 18 May 2015; pp. 234–241. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Donostia, Spain, 5–8 June 2017; pp. 4700–4708. [Google Scholar]
- Laina, I.; Rupprecht, C.; Belagiannis, V.; Tombari, F.; Navab, N. Deeper depth prediction with fully convolutional residual networks. In Proceedings of the 2016 IEEE Fourth international Conference on 3D Vision (3DV), Stanford, CA, USA, 25 October 2016; pp. 239–248. [Google Scholar]
- Beyer, R.; Alexandrov, O.; McMichael, S. The Ames Stereo Pipeline: NASA’s Opensource Software for Deriving and Processing Terrain Data. Earth Space Sci. 2018, 5, 537–548. [Google Scholar] [CrossRef]
- Tao, Y.; Muller, J.-P.; Poole, W.D. Automated localisation of Mars rovers using co-registered HiRISE-CTX-HRSC orthorectified images and DTMs. Icarus 2016, 280, 139–157. [Google Scholar] [CrossRef] [Green Version]
- Cai, G.R.; Jodoin, P.M.; Li, S.Z.; Wu, Y.D.; Su, S.Z.; Huang, Z.K. Perspective-SIFT: An efficient tool for low-altitude remote sensing image registration. Signal. Process. 2013, 93, 3088–3110. [Google Scholar] [CrossRef]
- Meng, Q.; Wang, D.; Wang, X.; Li, W.; Yang, X.; Yan, D.; Li, Y.; Cao, Z.; Ji, Q.; Sun, T.; et al. High Resolution Imaging Camera (HiRIC) on China’s First Mars Exploration Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 1–29. [Google Scholar] [CrossRef]
- Robinson, M.S.; Brylow, S.M.; Tschimmel, M.; Humm, D.; Lawrence, S.J.; Thomas, P.C.; Denevi, B.W.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.A.; et al. Lunar reconnaissance orbiter camera (LROC) instrument overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| F03_037070_1980_XN_18N024W | J01_045101_1981_XN_18N023W | J05_046934_1985_XN_18N025W |
| F03_037136_1977_XN_17N023W | J02_045378_1981_XN_18N023W | F17_042622_1981_XN_18N024W |
| F23_044811_1985_XN_18N024W | J01_045167_1983_XN_18N024W | J14_050138_1986_XN_18N025W |
| F23_044956_1984_XN_18N024W | J03_045800_1983_XN_18N024W | K05_055518_1986_XN_18N025W |
| ESP_037558_1985_RED | ESP_037703_1980_RED | ESP_039154_1985_RED | ESP_039721_1980_RED |
| ESP_039932_1980_RED | ESP_040433_1985_RED | ESP_040921_1985_RED | ESP_042134_1985_RED |
| ESP_042701_1980_RED | ESP_044178_1985_RED | ESP_044257_1980_RED | ESP_044679_1985_RED |
| ESP_047079_1985_RED | ESP_047435_1985_RED | ESP_047501_1985_RED | ESP_049927_1980_RED |
| ESP_051272_1985_RED | ESP_052828_1980_RED | ESP_055175_1980_RED | ESP_055241_1980_RED |
| ESP_057747_1985_RED | ESP_058090_1985_RED | ESP_058169_1985_RED | ESP_059659_1980_RED |
| ESP_059725_1985_RED | ESP_060714_1985_RED | ESP_066833_1980_RED | ESP_067044_1990_RED |
| ESP_067585_1990_RED | ESP_068258_1980_RED | ESP_068456_1985_RED | PSP_003195_1985_RED |
| PSP_007019_1980_RED | PSP_009735_1985_RED | ESP_037070_1985_RED | ESP_046512_1980_RED |
| ESP_051206_1985_RED | ESP_019084_1980_RED | ESP_043268_1980_RED | ESP_062402_1985_RED |
| ESP_065448_1985_RED | ESP_067717_1985_RED | PSP_002694_1985_RED | ESP_045167_1980_RED |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Muller, J.-P.; Conway, S.J.; Xiong, S. Large Area High-Resolution 3D Mapping of Oxia Planum: The Landing Site for the ExoMars Rosalind Franklin Rover. Remote Sens. 2021, 13, 3270. https://doi.org/10.3390/rs13163270
Tao Y, Muller J-P, Conway SJ, Xiong S. Large Area High-Resolution 3D Mapping of Oxia Planum: The Landing Site for the ExoMars Rosalind Franklin Rover. Remote Sensing. 2021; 13(16):3270. https://doi.org/10.3390/rs13163270
Chicago/Turabian StyleTao, Yu, Jan-Peter Muller, Susan J. Conway, and Siting Xiong. 2021. "Large Area High-Resolution 3D Mapping of Oxia Planum: The Landing Site for the ExoMars Rosalind Franklin Rover" Remote Sensing 13, no. 16: 3270. https://doi.org/10.3390/rs13163270
APA StyleTao, Y., Muller, J.-P., Conway, S. J., & Xiong, S. (2021). Large Area High-Resolution 3D Mapping of Oxia Planum: The Landing Site for the ExoMars Rosalind Franklin Rover. Remote Sensing, 13(16), 3270. https://doi.org/10.3390/rs13163270