3.1. Related Recent Review Works
First approaches for collision avoidance between ships can be dated back to about the year 1957 and considered encounters between two ships. These approaches were based upon the triangle of velocities, which describes the relationship between the speed of an own ship, the speed of a target ship and the relative speed of a target ship in reference to an own ship. Examples of such methods were introduced by D. Sadler [
11], E. Calvert [
12,
13], J. Garcia-Frias [
14], F. Wylie [
15,
16] and S. Hollingdale [
17].
In the early 2000s, the first real-time path planning methods for vessels in collision situations at sea emerged [
18,
19]. Since that time interest in that topic has grown rapidly and this trend lasts until now. Due to that reason over the years different reviews dedicated to ships collision avoidance and path planning were presented. Among the most comprehensive and up-to-date studies, the following works should be noted [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31].
Vagale et al. in [
20] reports different recently carried out and ongoing research projects dedicated to the development of autonomous vessels, other review papers published in the years 2008–2020 and proposes a classification of the methods applied in path planning algorithms for ships. A continuation of this paper can be found in [
21], where methods introduced in 45 selected papers from the years 2010–2020 are compared in details, stating their main advantages and limitations. The following properties were compared: local or global path planning, compliance with the International Regulations for Preventing Collisions at Sea (COLREGs), type of traffic area (open waters, coastal area or congested waters), type of obstacles (static, single dynamic, multiple dynamic), type of verification (simulation, field test), consideration of environmental disturbance, consideration of vessel dynamics, safety domain (own ship, target ship).
Huang et al. in [
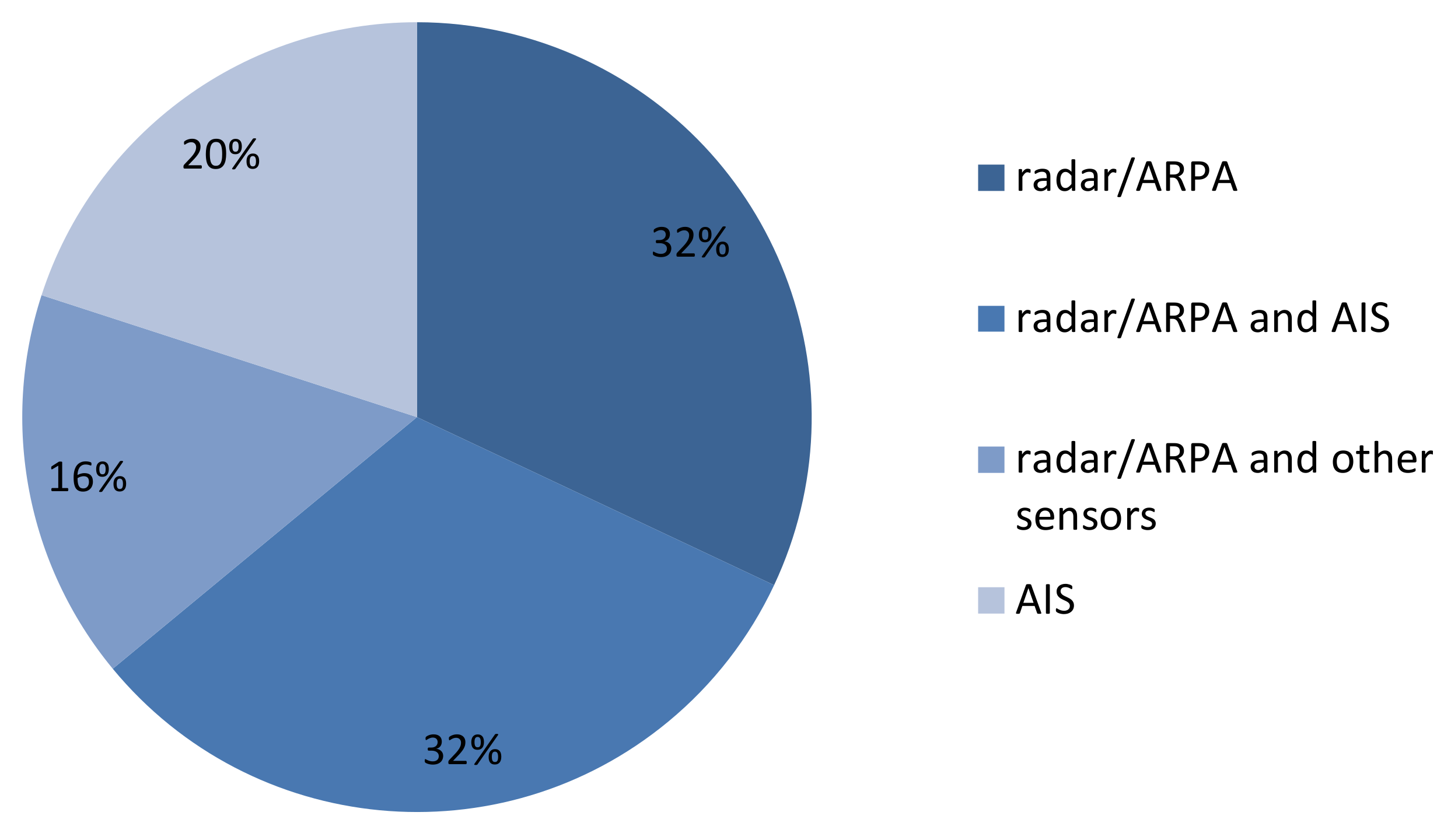
22] concentrated in their review on reactive collision avoidance, taking into account moving and unknown obstacles, for both manned and unmanned ships. Authors presented the differences and common features of the decision process in collision avoidance of both manned and unmanned vessels. Different methods concerning three aspects of the collision avoidance process: motion prediction, conflict detection and conflict resolution, are compared in this paper. In the process of collision avoidance, despite the modules mentioned above, the authors distinguished also the observer. This component contains various sensors in order to support other modules, but the overview of methods concerning the observer module was not included in the paper. This paper supplements these information, presenting a comparative analysis of different path planning methods for ships, with a special consideration of input data to the algorithms from a radar system and/or other sensors, such as AIS, the Electronic Chart Display and Information System (ECDIS), cameras.
A comparison of path planning methods for Unmanned Surface Vehicles (USVs) was presented by Singh et al. in [
23] and Campbell et al. in [
24]. Liu et al. in [
25] also concentrated on USVs in their survey. The authors compared different developed USVs starting from the year 1985. In [
26], Liu and Bucknall presented a literature review of approaches applied for formation path planning of USVs. In [
32], Naeem et al. introduced a collision avoidance method for USVs based upon a modified version of the A* algorithm. Zeng et al. in [
27] compared approaches for Autonomous Underwater Vehicles (AUVs). Szlapczynski and Szlapczynska in [
28] revised different approaches to ship domains. Tu et al. in [
29] presented a survey of AIS data sources and different path planning methods, which may utilize AIS data.
Tam et al. in [
30] compared selected studies on collision avoidance for ships, starting from the 1960s. Authors in their survey divide the methods into different groups, such as: collision risk assessment, collision avoidance, deterministic approaches for path planning and heuristic approaches for path planning. The state-of-the-art analysis was summarized by an indication with reasoning of the most practical, most efficient and most promising methods.
Among previous reviews is the work of Statheros et al. [
31], where the authors divided the collision avoidance methods into these based upon: mathematical models and algorithms and soft computing techniques (evolutionary algorithms (EA), neural networks, fuzzy logic).
The aim of this paper was to present a comparative analysis of recent collision avoidance and real-time path planning methods with particular emphasis on radar remote sensing.
Algorithms can be categorized into the following types of methods:
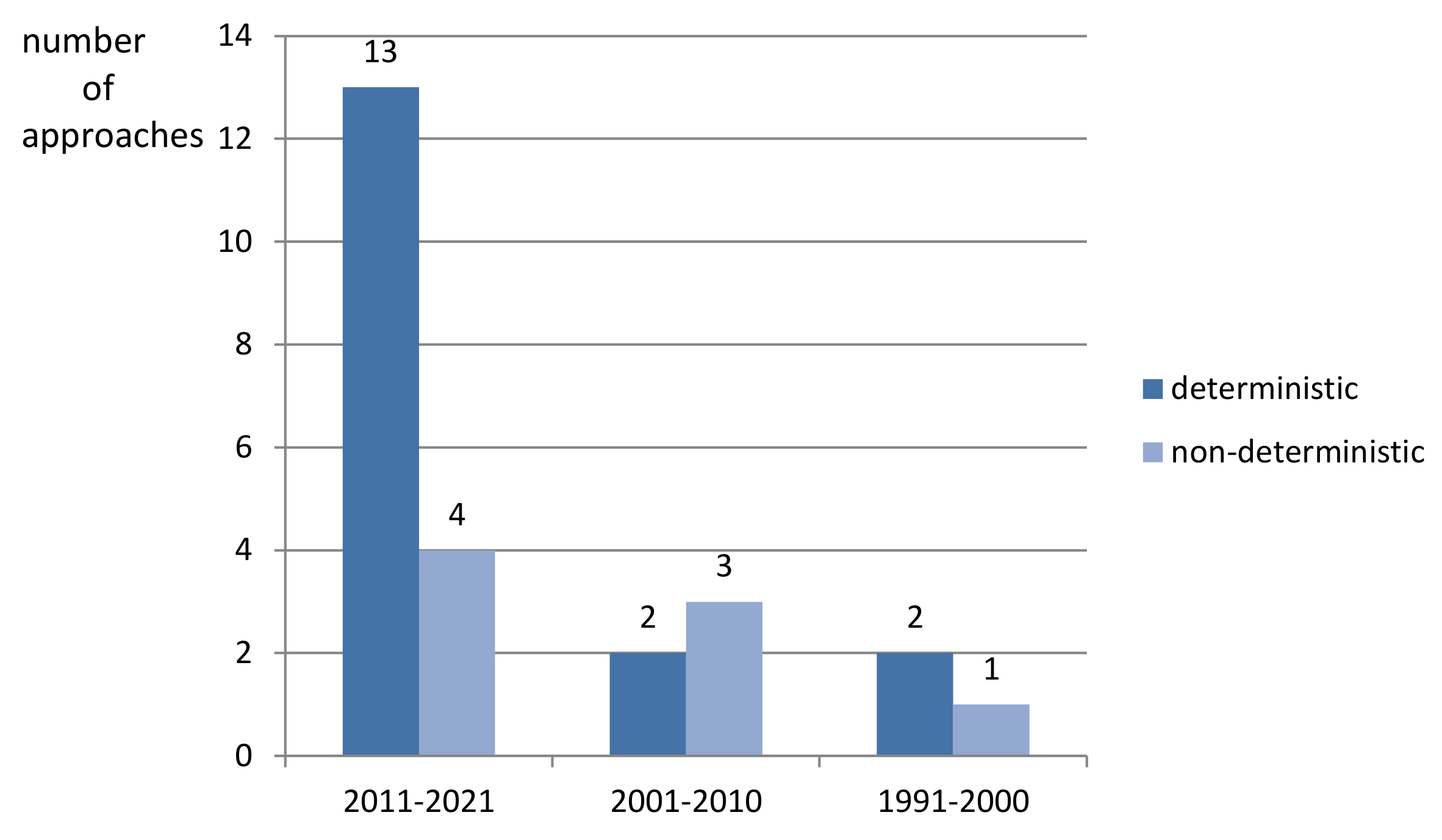
3.2. Deterministic Approaches
Deterministic algorithms are approaches which realize a set of precisely defined steps in order to find a solution to a defined problem. Therefore, they always return the same solution for every run of calculations with the same input data. In this subsection, recent collision avoidance and real time path planning deterministic methods for ships are briefly presented and compared.
In 2021 [
33], authors introduced an approach utilizing the velocity obstacles (VO) method. DCPA and TCPA measures are used in order to assess the collision risk. Certain conditions concerning COLREGs are defined in this approach for different encounter situations: head-on, crossing and overtaking. Radar and AIS data are assumed to be available. Results of simulation tests of encounters with up to four target vessels are given in the paper.
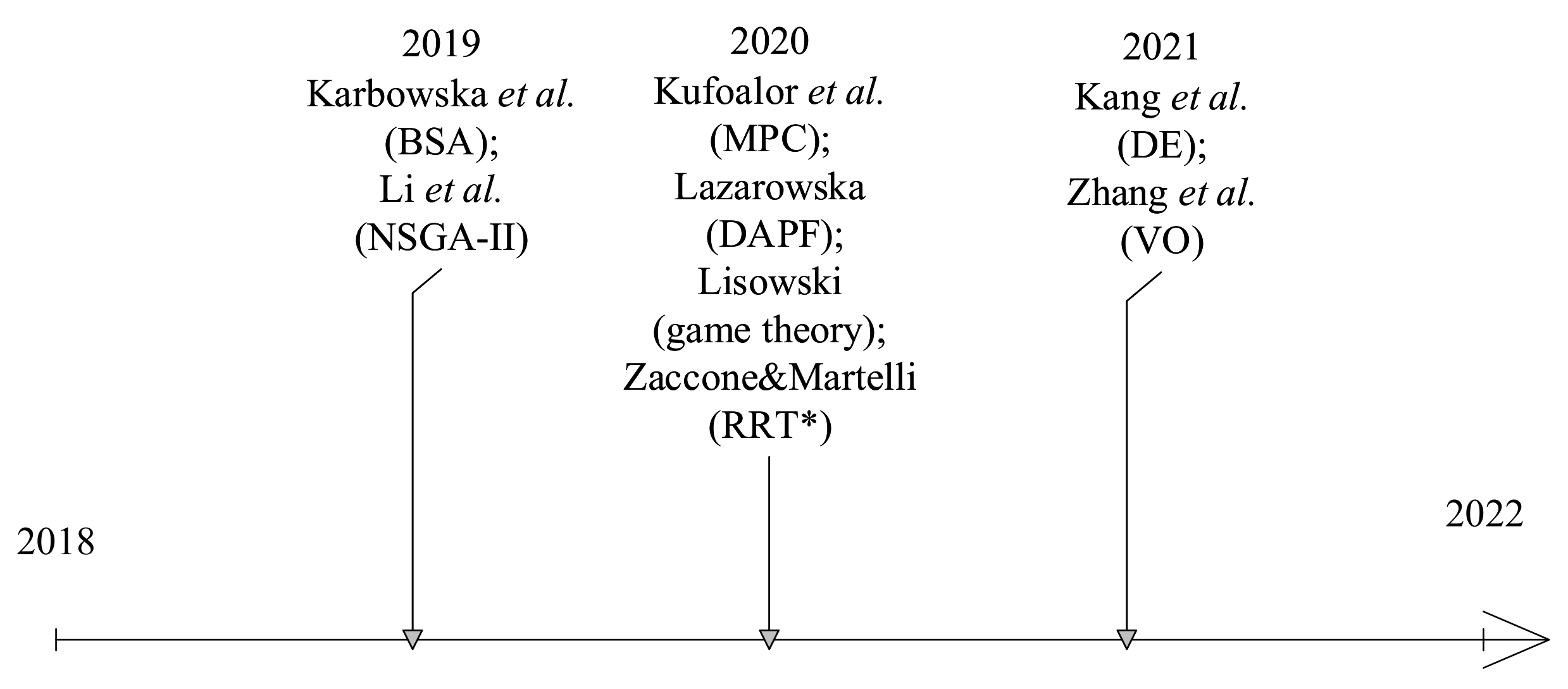
In 2020 [
34], authors presented results of Autonomous Surface Vehicle’s (ASV’s) field trails. Collision avoidance in this approach is based on model predictive control (MPC) [
35]. Data about target vessels were obtained using AIS. A circular safety region around target ships was assumed, similarly as in [
36]. Possible collision avoidance actions are chosen from a set of admissible control behaviors, which include course changes by 0, 15, 30, 45, 60, 75 and 90 degrees or one of the following speed changes: “keep speed”, “slow down” or “stop”. The cost function includes a grounding cost for penalizing control actions that lead to a collision with land. It also takes into account the COLREGs transitional cost, introduced in [
37]. It is used in order to prioritize COLREGs compliance maneuvers. Field tests were carried out in the North Sea in November 2017 and covered encounters with up to three target vessels.
In 2020 [
38], the author presented a game theory approach applied in order to solve the ships collision avoidance problem. Two types of differential games models are introduced: positional game and matrix game. A strategy characterized by a minimal deviation from the initial path is chosen as the best strategy out of acceptable strategies. COLREGs are taken into account with the use of a logical function resulting from the semantic interpretation of rules. Data concerning target ships are obtained from ARPA. Results of simulation tests carried out using MATLAB are presented in the paper. An encounter situation with 13 target ships is presented as an example. Real navigational data describing this situation received from the radar system with ARPA are used as input data for the algorithms.
In 2019 [
39], a Beam Search Algorithm (BSA) was proposed, which was validated by simulations and field experiments on board m/f Wolin. Data from ARPA and/or AIS were assumed as a source of information concerning target ships. The approach is characterized by a very low run time of the algorithm (milliseconds), but it does not include a mechanism forcing the COLREGs compliance of solutions. In [
40], the an extension of this method for multi-ship encounters was presented.
In a research shown in 2018 [
36], a closed-loop collision avoidance system (COLAV) utilizing a dynamic window (DW) algorithm was applied for an autonomous surface vehicle (ASV). The method was tested in Trondheimsfjord, Norway in May 2017. Data concerning a target ship were obtained with the use of a Simrad Broadband 4G marine radar. Tests included a head-on encounter with one target vessel.
A fuzzy set theory approach for ship’s collision avoidance was introduced in 2017 [
41]. Collision risk is assessed using CPA and TCPA measures. Input data concerning target ships are assumed to be obtained from the radar with ARPA. Results presented in the paper cover encounters with up to twelve target vessels. The method, enhanced by an application of a neural network, was compared with an approach based upon the game theory in [
42].
In 2016 [
43], a deterministic approach—the Trajectory Base Algorithm (TBA)—was introduced and applied using the same framework as in [
44], mentioned below. This method is characterized by a low run time, which does not exceed 2 s for scenarios presented in the paper. In 2020 [
45], the author proposed another deterministic approach—the Discrete Artificial Potential Field (DAPF) algorithm—using similar assumptions as in the previous works. The algorithm was inspired by the Artificial Potential Field method, but applied on a grid.
In 2015 [
46], another deterministic method was proposed- a linear extension algorithm. Two types of maneuvers are possible in this approach: a course change maneuver within a predefined range and speed reduction. A collision avoidance action is calculated, when a Collision Risk Index (CRI) of a pair of ships exceeds a threshold. It is assumed that data concerning target ships are obtained from ARPA. Results of an encounter of four ships are presented and discussed in the paper. Further results, concerning different CRI thresholds are given in [
47].
In 2014 [
48], authors present results of their research on a collision avoidance method for Unmanned Surface Vehicles (USVs). Presented approach is based upon the Velocity Obstacles (VO) method, with modifications enabling for COLREGs implementation. The method was validated by real experiments with the use of four marine crafts and an autonomy suite called Control Architecture for Robotic Agent Command and Sensing (CARACaS) developed by the Jet Propulsion Laboratory’s (USA).
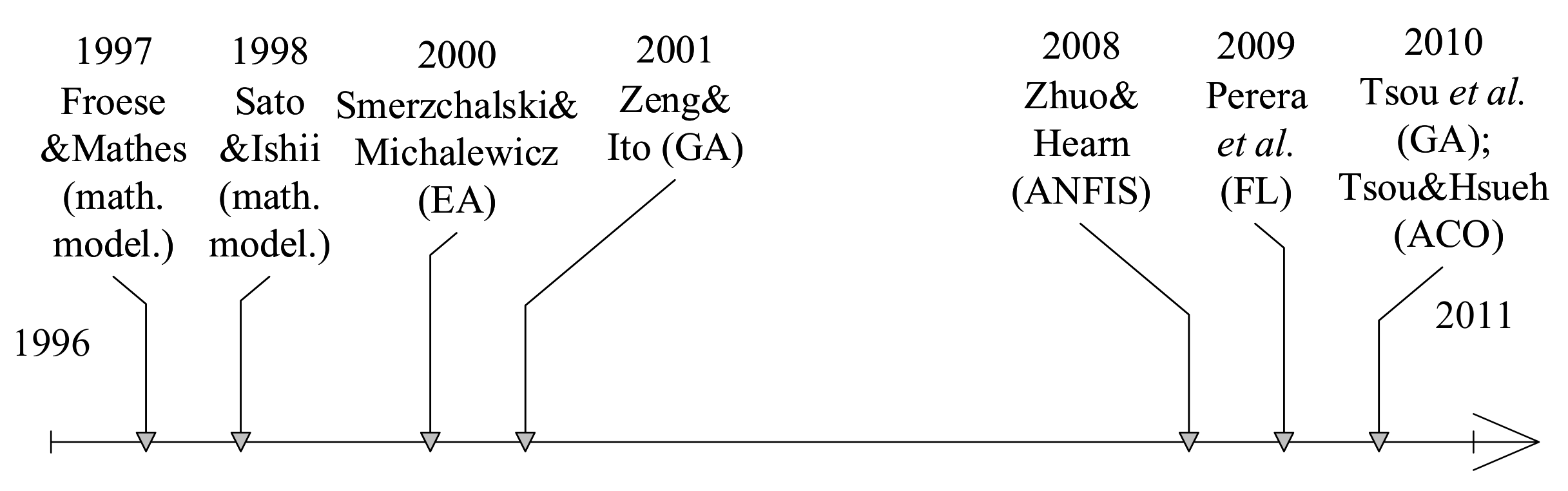
In 2009 [
49], a fuzzy logic-based decision making system was introduced. A radar system or a laser scanner is assumed to provide data concerning position and motion parameters of target ships. Presented results cover simulation tests with simple encounters defined by COLREGs, such as head-on, crossing and overtaking.
In 2008 [
50], the authors proposed an Adaptive Neuro-Fuzzy Inference system (ANFIS), which determines a proper Time to Take Action (TTA) for the assessed Safety Distance to Approach (SDA) and different course changes. Simulations of encounters with one target vessel are presented in the paper. Data concerning target ships are assumed to be available from AIS.
In 1998 [
51], a collision risk assessment method based upon data from a radar and an IR camera was introduced. Obtained information is then used in order to calculate a course alteration required for collision avoidance. The developed system was verified in Nagasaki Prefecture, Japan with one target vessel.
In 1997 [
52], the authors presented results of a research on computer-assisted collision avoidance. The aim of the project was to integrate information from ARPA and ECDIS and utilize obtained for determining avoidance maneuvers. A collision avoidance route is calculated with the use of a set of rules, taking COLREGs into account. The approach was validated by simulator tests at the Ship Handling and Simulation Facility (SUSAN) in Hamburg, Germany.
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8 contain a list of analyzed approaches with different evaluated features. The main aspect, on which this review was concentrated, is the application of radar remote sensing for target detection and tracking. Therefore, works which did not consider a source of input data concerning encountered ships were not included in this survey. The main focus was put on the application of a marine radar or a radar with ARPA. The usage of AIS or both ARPA and AIS was also taken into account. Another very important issue, evaluated in this state-of-the-art analysis, was the verification of proposed approaches in real experiments. The number of target ships taking part in such evaluations was also analyzed.
In
Table 3 and
Table 6 the key general features were compared, such as: applied objective function, consideration of static (lands, shallows) and dynamic (target ships) obstacles.
Table 4 and
Table 7 continue a comparative analysis with the concentration on: a method applied to assure the COLREGs fulfillment, an application of radar remote sensing and/or AIS data reception, and the usage of other sensors such cameras.
In the third part of an analysis, presented in
Table 5 and
Table 8, a way of methods’ verification is considered. The evaluation covers simulation tests, real experiments, number of target vessels considered in the tests and the run time of an algorithm.
3.3. Non-Deterministic Approaches
Non-deterministic algorithms can return different solutions for every run of calculations with the same input data due to their stochastic nature. These types of approaches use some probabilistic operations during the solution construction process. Many methods classified to this group are population-based algorithms, which apply probabilistic operations to a population of individuals in order to find the best solution for a considered problem. Population-based algorithms inspired by the behavior of animals or other biological organisms are called nature-inspired approaches. Examples of such methods are Evolutionary Algorithms (EA), Genetic Algorithms (GA), ACO (Ant Colony Optimization) or Particle Swarm Optimization (PSO). In this subsection recent collision avoidance and real time path planning methods for ships, classified to the non-deterministic group, are briefly presented and compared.
In 2021 [
53], a path planning method based upon a differential evolution (DE) algorithm was proposed, assuming that data concerning target ships are available from navigational aids such as ARPA and AIS. COLREGs are considered by adapting the shape of target ships’ domains. The approach was validated by simulations with up to four target ships.
In 2021, a random sampling approach, based upon a modified version of the Rapidly-exploring Random Tree algorithm (RRT*), for ship collision avoidance was introduced in [
54]. The approach takes both static and dynamic obstacles into account. Data concerning obstacles are assumed to be obtained form AIS and nautical charts. In a developed version of the method, presented in [
55], the authors also assumed a radar as a source of input data. The cost function considers the path length, the path smoothness and the distance from obstacles. An approach for including COLREGs in the proposed method was presented in [
55,
56]. The method was verified by simulations with two static obstacles (islands) and two target ships. The run time of the algorithm was not given, but it was assumed that the path is re-planned every 30 s. Presented results also covered situations with a changing strategy of a target ship.
In 2019 [
57], a multi-objective optimization algorithm was introduced. Non-dominated sorting genetic algorithm (NSGA-II) is applied in this approach in order to optimize the collision avoidance parameters. Data concerning target ships are assumed to be obtained from the ARPA, but real data were not used in simulations. Tests covered two-ship encounters defined by COLREGs (head-on, crossing and overtaking).
In 2017 [
58], authors introduced a heuristic approach for selecting a safe maneuver based upon the determination of the Collision Threat Parameters Area (CTPA). Authors proposed a CTPA-based radar display and a method of automatically selecting a safe maneuver using such a display. The presented results cover an overtaking scenario and a crossing scenario with two target ships. It also takes into account shallows and lands when choosing a safe maneuver.
In a research presented in 2015 [
59], a grid-based path search algorithm for the calculation of a ship’s evasive maneuvers was applied. Authors underline the need to consider uncertainties of target tracks in collision avoidance systems. A probabilistic method of target ships handling in the algorithm is applied, which is based upon current positions and motion parameters of target ships along with associated uncertainties. The path search algorithm uses an A* algorithm with a specific cell-neighborhood applied, called the T-neighborhood. This name comes from the T-shaped geometry formed by the adjacent cells. In the paper, an example with three target ships is presented.
In [
60], the authors’ approach based upon the A* algorithm, introduced in [
61], was tested with the use of a recreational craft “Korona”. The vessel was equipped with a low cost Navico BR24 FMCW radar system. Tests were carried out on the Lake Constance and the Rhine river in Germany. There was one target vessel used in the tests. An example of a collision avoidance trajectory executed by the vessel was presented in the paper. The authors stated that the method enables for real-time path planning.
In 2015, a description of the Hyundai intelligent Collision Avoidance Support System (HiCASS) was presented in [
62]. Data concerning target ships are obtained from a radar with ARPA and AIS. The Electronic Navigational Chart (ENC) is applied to obtain data about the coastline. The method applied the A* algorithm in order to determine a collision avoidance action. The system was tested on a 13100 TEU container ship Hyundai Hope on a route from Busan, South Korea to Hamburg, Germany. Presented results include a description of solutions compared with the officer’s actions.
In 2015 [
44], a ship’s safe trajectory planning approach utilizing Ant Colony Optimization (ACO) was also proposed. Minimum path length was applied as an objective function. COLREGs are enforced by a proper shape and size of a target ship hexagon domain. Static obstacles are taken into account and are modeled as polygons. ARPA data are assumed to provide target ships’ position and motion parameters. In simulation tests, AIS data from Marine Traffic were used. Further validation of this method with the use of radar system data was presented in [
63].
In 2010 [
64], a different algorithm based upon the Ant Colony Optimization (ACO) was introduced. Target ship’s data were assumed to be obtained from AIS. Radar data were not considered in this approach. A knowledge base was utilized in order to achieve COLREGs-compliant solutions. The method was verified by simulations with up to four target vessels.
In [
65], the authors presented an approach similar to that introduced in [
64]. Here, a different optimization method was applied—a genetic algorithm (GA). Other assumptions were similar. AIS was assumed to be utilized in order to obtain information concerning target ships. A fuzzy domain, estimated with the use of ship’s length, speed and sea state, introduced in [
66], was applied in this research. Results of simulation tests with one target ship were presented in the paper.
In 2001 [
18], an approach utilizing a genetic algorithm and data from the ARPA system was introduced. The method was tested on a vessel “Shioji Maru”. In the paper, a situation with 18 target ships is presented.
In 2000 [
19], an Evolutionary Algorithm-based approach to safe trajectory planning was presented. Presented solutions covered simulation tests with up to three target ships and with static obstacles (lands, canals, restricted zones). Data concerning target ships were assumed to be obtained from ARPA.
Table 6.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 1.
Table 6.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 1.
| Method | Year | Objective | Static Obs. | Dynamic Obs. |
|---|
| DE | 2021 | Min. path | Not | TS |
| [53] | length | considered | domain |
| RRT* | 2020 | Cost | Set of | Safe |
| [54] | function | points | distance |
| NSGA-II | 2019 | Pareto- | Not | OS and TS |
| [57] | optimal set | considered | domain |
| CTPA | 2017 | Pareto- | Lands, | Elliptical |
| [58] | optimality | shallows | domain |
| A* | 2015 | Min. path | Possible | Circular |
| [59] | length | (not considered) | domain |
| A* | 2015 | Time integral of | From | Detected by |
| [62] | | collision risk (CR) | ENC | ARPA, AIS |
| ACO | 2015 | Min. path | Modeled as | Hexagon |
| [44] | length | polygons | domain |
| ACO | 2010 | Min. path | Not | Fuzzy |
| [64] | length | considered | domain [66] |
| GA | 2010 | Min. path | Not | Fuzzy |
| [64] | length | considered | domain [66] |
| GA | 2001 | Economy, safety | Not | Detected |
| [18] | rules | considered | by ARPA |
| EA | 2000 | Cost | Modeled as | Hexagon |
| [19] | function | polygons | domain |
Table 7.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 2.
Table 7.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 2.
| Method | Year | COLREGs | Radar Data | AIS, Other Sensors |
|---|
| DE | 2021 | TS domain | ARPA assumed | AIS assumed |
| [53] | shape | -no real data | -no real data |
| RRT* | 2020 | Considered | Radar assumed | AIS, nautical charts |
| [54] | [56] | in [55] | -no real data |
| NSGA-II | 2019 | Set fulfilling | ARPA assumed | Not |
| [57] | COLREGs | -no real data | considered |
| CTPA | 2017 | Starboard over | ARPA assumed | AIS, ENC assumed |
| [58] | port side | -no real data | -no real data |
| A* | 2015 | Domain | Low cost | Not |
| [59] | shape | radar | considered |
| A* | 2015 | Expert | ARPA | AIS, ENC |
| [62] | system | | |
| ACO | 2015 | Domain | ARPA assumed | AIS assumed |
| [44] | shape, size | -no real data | (Marine Traffic) |
| ACO | 2010 | Knowledge | Not | AIS assumed |
| [64] | base | considered | -no real data |
| GA | 2010 | Set of | Not | AIS assumed |
| [64] | rules | considered | -no real data |
| GA | 2001 | Fitness | ARPA | Not |
| [18] | function | -real data | considered |
| EA | 2000 | Domain | ARPA assumed | Not |
| [19] | shape, size | -no real data | considered |
Table 8.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 3.
Table 8.
A comparison of non-deterministic methods applying radar remote sensing and other sensors—part 3.
| Method | Year | Simulations | Real Exp. | Max No of TSs | Run Time |
|---|
| DE [53] | 2021 | Yes | No | 4 | Not given |
| RRT* [54] | 2020 | Yes | No | 2 | Re-planning every 30 sec. |
| NSGA-II [57] | 2019 | Yes | No | 1 | Not given |
| CTPA [58] | 2017 | Yes | No | 2 | Maximum 1 min. |
| A* [59] | 2015 | Yes | Yes results in [60] | 3 | Not given |
| A* [62] | 2015 | No | Yes | Not specified | Not given |
| ACO [44] | 2015 | Yes | No | 7 | Within 1 min. |
| ACO [64] | 2010 | Yes | No | 4 | 10–20 sec. |
| GA [64] | 2010 | Yes | No | 1 | Within 1 min. |
| GA [18] | 2001 | No | Yes | 18 | Not given |
| EA [19] | 2000 | Yes | No | 3 | Average 55 sec. |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










