
Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data

 , ,
, ,
Abstract
1. Introduction
- We propose a SCNeSt architecture in which the channel-wise attention with multi-path representation and self-calibrated convolutions provide a higher detection and estimation accuracy for small impact craters.
- To address the issues caused by a single data source with low resolution and insufficient impact crater features, we extract the profile and curvature of the impact crater from Chang ’e-1 DEM data, integrated it with Chang ’e-1 DOM data, and combined it with International Astronomical Union (IAU) impact crater database, and constructed the VOC data set.
- The lunar crater model is trained, and transfer learning is used to detect the impact craters on Mercury and Mars. This is shown to increase the model’s generalization ability.
2. Methods
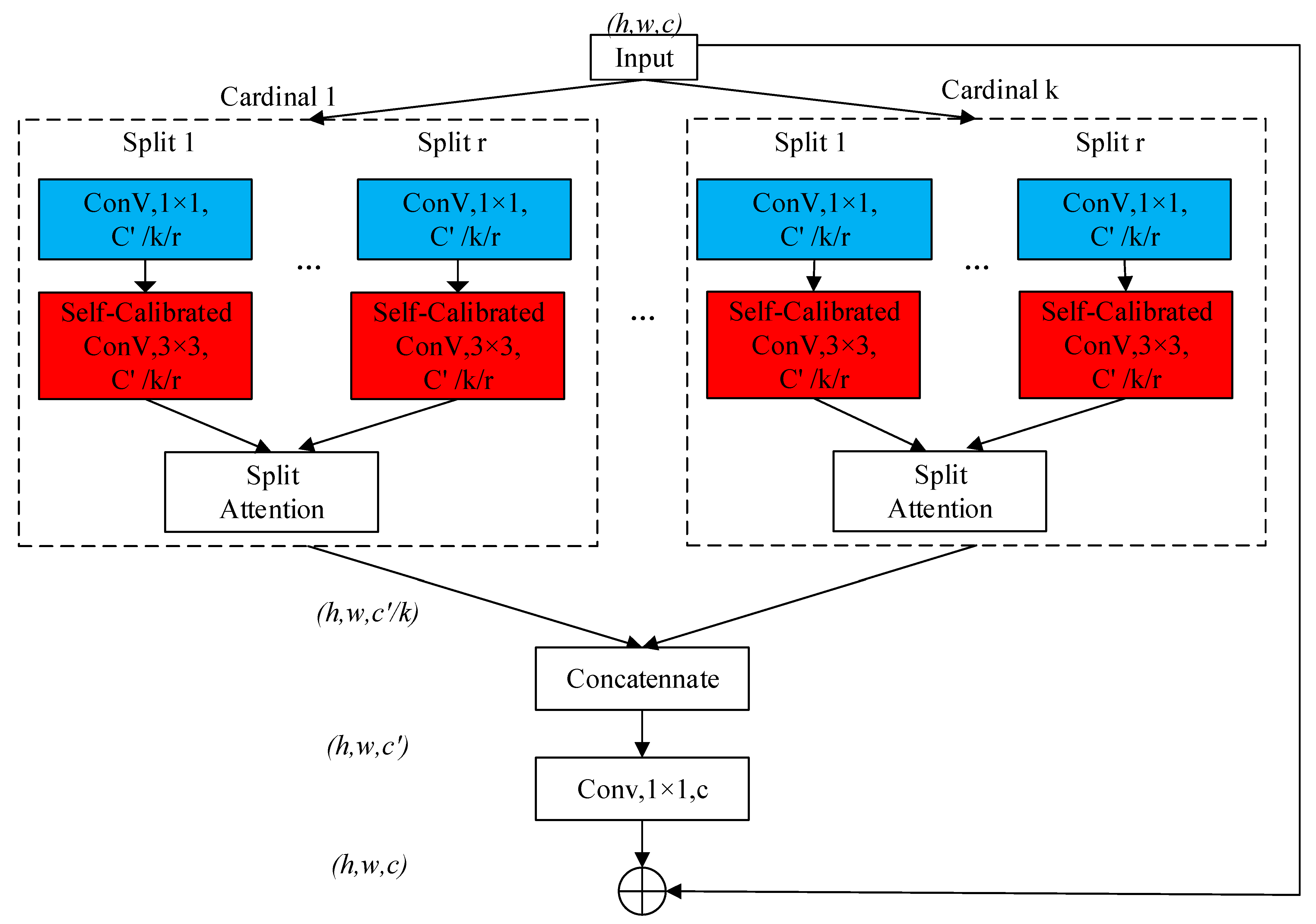
2.1. SCNeSt Backbone Network
- (1)
- Self-calibrated branching significantly increases the receptive field of the output features and acquires more features.
- (2)
- The self-calibrated branch only considers the information of the airspace position, avoiding the information of the unwanted region, hence uses resources more efficiently.
- (3)
- Self-calibrated branching also encodes multi-scale feature information and further enriches the feature content.
2.2. Multi-Scale Feature Extractor
2.3. Position-Sensitive ROI Align
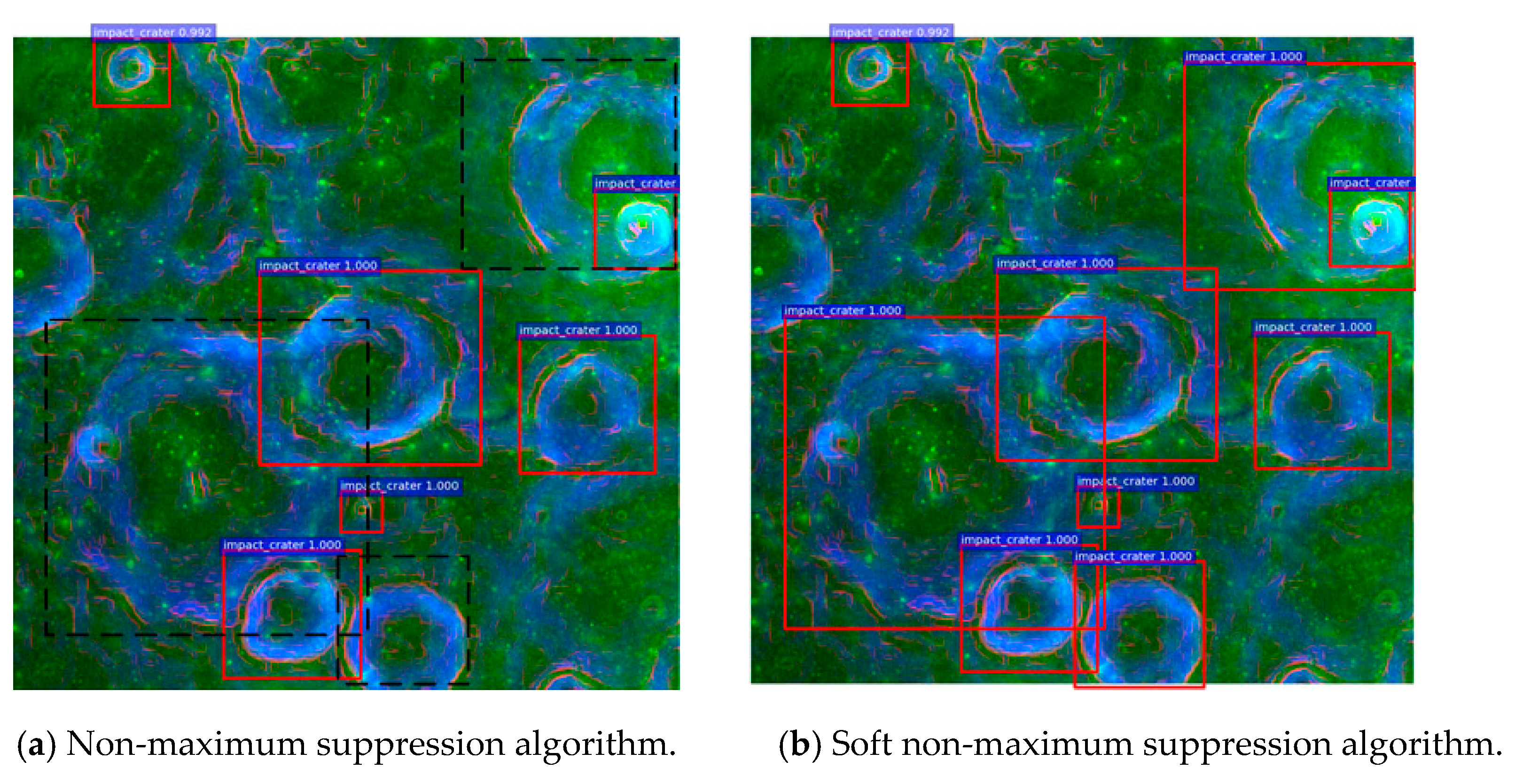
2.4. Soft-NMS
3. Experiments
3.1. Dataset
3.2. Evaluation Metrics
3.3. Training Details
4. Results and Discussion
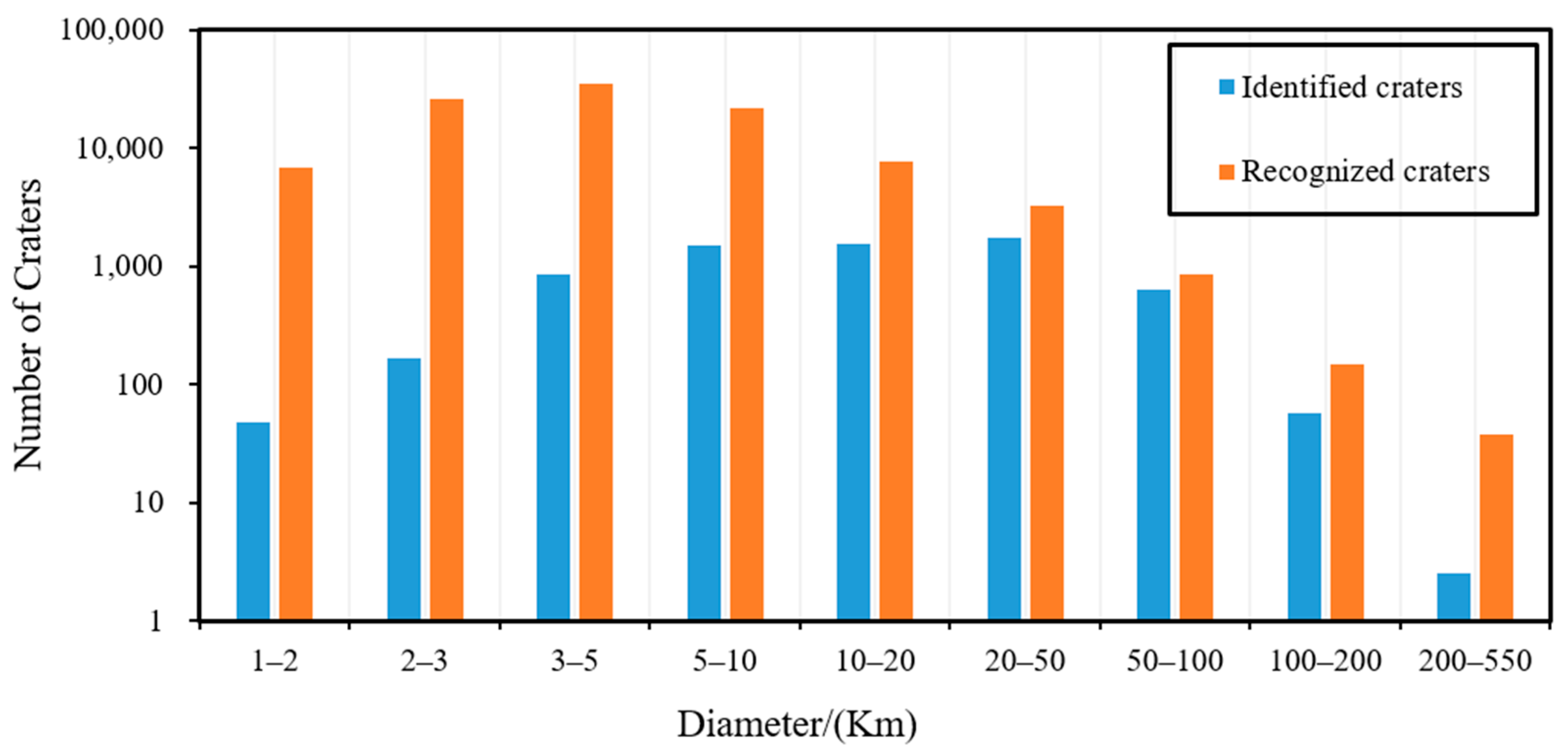
4.1. Analysis of the Lunar Impact Crater Detection Results
- (1)
- Head et al. [26], where a total of 5185 craters with a diameter of D ≥ 20 km was obtained by the Digital Terrestrial Model (DTM) of the Lunar Reconnaissance Orbiter (LRO) Lunar Orbiter Laser Altimeter (LOLA);
- (2)
- Povilaitis et al. [27], in which the previously described database was expanded to 22,746 craters with D = 5–20 km;
- (3)
- The Robbins database [28] holds over 2 million lunar craters, including 1.3 million with D ≥ 1 km. This database contains the largest number of lunar craters.
- (4)
- Salamunićcar et al. [29], in which LU78287GT was generated based on Hough transform;
- (5)
- Wang et al. [30], which was based on CE-1 data, and included 106,016 impact craters with D > 500 m;
- (6)
- Silburt et al. [12], which was based on the DEM data from CNN and LRO and generated a meteorite crater database.
- (7)
- Yang et al. [3] adopted the CE-1 and CE-2 data and compiled 117,240 impact craters with D ≥ 1–2 km.
4.2. Network Performance Comparison
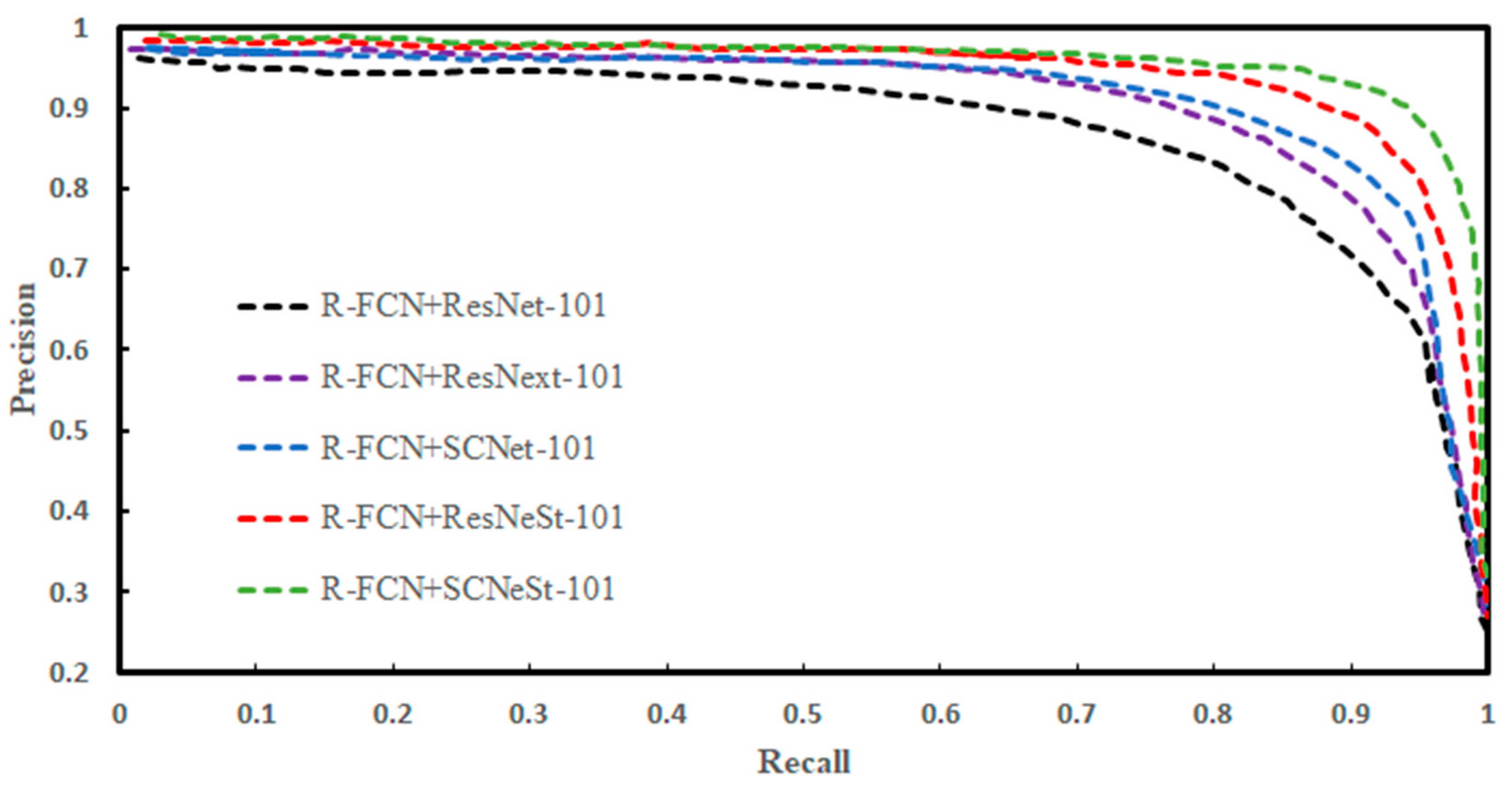
4.2.1. Comparison of Crater Detection Performance of Different Networks
4.2.2. Performance Comparison of Multi-Scale Impact Crater Networks
4.3. Transfer Learning in Mars and Mercury Impact Crater Detection Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CDA | Crater detection algorithm |
| LRO | Lunar Reconnaissance Orbiter |
| MOLA | Mars Orbiter Laser Altimeter |
| MOC | Mars Orbiter Camera |
| HRSC | High Resolution Stereo Camera |
| CNN | Convolutional neural networks |
| IAU | International Astronomical Union |
| RPN | Region proposal network |
| NMS | Non-maximum suppression |
| RoI | Region of interest |
| FPN | Feature pyramid network |
| DEM | Digital Elevation Model |
| DTM | Digital Terrestrial Model |
| DOM | Digital Orthophoto Map |
References
- Fudali, R.F. Impact cratering: A geologic process. J. Geol. 1989, 97, 773. [Google Scholar] [CrossRef]
- Neukum, G.; Nig, B.; Arkani-Hamed, J. A study of lunar impact crater size-distributions. Moon 1975, 12, 201–229. [Google Scholar] [CrossRef]
- Yang, C.; Zhao, H.; Bruzzone, L.; Benediktsson, J.A.; Liang, Y.; Liu, B.; Zeng, X.; Guan, R.; Li, C.; Ouyang, Z. Lunar impact crater identification and age estimation with Chang’E data by deep and transfer learning. Nat. Commun. 2020, 11, 6358. [Google Scholar] [CrossRef] [PubMed]
- Craddock, R.A.; Maxwell, T.A.; Howard, A.D. Crater morphometry and modification in the Sinus Sabaeus and Margaritifer Sinus regions of Mars. J. Geo. Res. 1997, 102, 13321–13340. [Google Scholar] [CrossRef]
- Biswas, J.; Sheridan, S.; Pitcher, C.; Richter, L.; Reiss, P. Searching for potential ice-rich mining sites on the Moon with the Lunar Volatiles Scout. Planet. Space Sci. 2019, 181, 104826. [Google Scholar] [CrossRef]
- De Rosa, D.; Bussey, B.; Cahill, J.T.; Lutz, T.; Crawford, I.A.; Hackwill, T.; van Gasselt, S.; Neukum, G.; Witte, L.; McGovern, A.; et al. Characterisation of potential landing sites for the European Space Agency’s Lunar Lander project. Planet. Space Sci. 2012, 74, 224–246. [Google Scholar] [CrossRef]
- Iqbal, W.; Hiesinger, H.; Bogert, C. Geological mapping and chronology of lunar landing sites: Apollo 11. Icarus 2019, 333, 528–547. [Google Scholar] [CrossRef]
- Yan, W.; Gang, Y.; Lei, G. A novel sparse boosting method for crater detection in the high resolution planetary image. Adv. Space Res. 2015, 56, 982–991. [Google Scholar]
- Kim, J.R.; Muller, J.P.; Van Gasselt, S.; Morley, J.G.; Neukum, G. Automated Crater Detection, A New Tool for Mars Cartography and Chronology. Photogramm. Eng. Remote Sens. 2015, 71, 1205–1218. [Google Scholar] [CrossRef]
- Salamunićcar, G.; Lončarić, S.; Mazarico, E. LU60645GT and MA132843GT catalogues of Lunar and Martian impact craters developed using a Crater Shape-based interpolation crater detection algorithm for topography data. Planet. Space Sci. 2012, 60, 236–247. [Google Scholar] [CrossRef]
- Karachevtseva, I.P.; Oberst, J.; Zubarev, A.E.; Nadezhdina, I.E.; Kokhanov, A.A.; Garov, A.S.; Uchaev, D.V.; Uchaev, D.V.; Malinnikov, V.A.; Klimkin, N.D. The Phobos information system. Planet. Space Sci. 2014, 102, 74–85. [Google Scholar] [CrossRef]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Tamayo, D.; Menou, K. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef]
- Ali-Dib, M.; Menou, K.; Jackson, A.P.; Zhu, C.; Hammond, N. Automated crater shape retrieval using weakly-supervised deep learning. Icarus 2020, 345, 113749. [Google Scholar] [CrossRef]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Yairi, T. Automated crater detection algorithms from a machine learning perspective in the convolutional neural network era. Adv. Space Res. 2019, 64, 1615–1628. [Google Scholar] [CrossRef]
- Michael, G.G. Coordinate registration by automated crater recognition. Planet. Space Sci. 2003, 51, 563–568. [Google Scholar] [CrossRef]
- Cheng, Y.; Johnson, A.E.; Matthies, L.H.; Olson, C.F. Optical Landmark Detection for Spacecraft Navigation. In Proceedings of the 13th AAS/AIAA Space Flight Mechanics Meeting, Ponce, PR, USA, 24–27 March 2003; pp. 1785–1803. [Google Scholar]
- Cohen, J.P.; Ding, W. Crater detection via genetic search methods to reduce image features. Adv. Space Res. 2014, 53, 1768–1782. [Google Scholar] [CrossRef][Green Version]
- Zheng, Z.; Zhang, S.; Yu, B.; Li, Q.; Zhang, Y. Defect Inspection in Tire Radiographic Image Using Concise Semantic Segmentation. IEEE Access 2020, 8, 112674–112687. [Google Scholar] [CrossRef]
- Jia, Y.; Liu, L.; Zhang, C. Moon Impact Crater Detection Using Nested Attention Mechanism Based UNet++. IEEE Access 2021, 9, 44107–44116. [Google Scholar] [CrossRef]
- Barker, M.K.; Mazarico, E.M.; Neumann, G.A.; Zuber, M.T.; Smith, D.E. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef]
- Liu, J.; Hou, Q.; Cheng, M.; Wang, C.; Feng, J. Improving Convolutional Networks With Self-Calibrated Convolutions. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10093–10102. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 91–99. [Google Scholar] [CrossRef]
- Neubeck, A.; Gool, L. Efficient Non-Maximum Suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; pp. 850–855. [Google Scholar]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS—Improving Object Detection with One Line of Code. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5562–5570. [Google Scholar]
- Head, J.W.; Fassett, C.I.; Kadish, S.J.; Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E. Global Distribution of Large Lunar Craters: Implications for Resurfacing and Impactor Populations. Science 2010, 329, 1504–1507. [Google Scholar] [CrossRef] [PubMed]
- Povilaitis, R.Z.; Robinson, M.S.; van der Bogert, C.H.; Hiesinger, H.; Meyer, H.M.; Ostrach, L.R. Crater density differences: Exploring regional resurfacing, secondary crater populations, and crater saturation equilibrium on the moon. Planet. Space Sci. 2018, 162, 41–51. [Google Scholar] [CrossRef]
- Robbins, S.J. A New Global Database of Lunar Impact Craters >1–2 km: 1. Crater Locations and Sizes, Comparisons with Published Databases, and Global Analysis. J. Geophys. Res. Planets 2019, 124, 871–892. [Google Scholar] [CrossRef]
- Salamunićcar, G.; Lončarić, S.; Grumpe, A.; Wöhler, C. Hybrid method for crater detection based on topography reconstruction from optical images and the new LU78287GT catalogue of Lunar impact craters. Adv. Space Res. 2014, 53, 1783–1797. [Google Scholar] [CrossRef]
- Wang, J.; Cheng, W.; Zhou, C. A Chang’E-1 global catalog of lunar impact craters. Planet. Space Sci. 2015, 112, 42–45. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Learning rate | 0.0001 |
| Training batches | 10,000 |
| Training wheels | 1000 |
| Objective function | Cross-entropy and MSE |
| Backbone | Precision (%) | Recall (%) | F1 Score (%) | Times (s) | Params (M) |
|---|---|---|---|---|---|
| ResNet-50-FPN | 79.2 | 63.5 | 70.4 | 0.140 | 25.6 |
| SCNet-50-FPN | 80.1 | 75.6 | 77.7 | 0.141 | 25.6 |
| ResNeXt-50-FPN | 84.2 | 79.3 | 81.6 | 0.132 | 25.0 |
| ResNeSt-50-FPN | 86.3 | 80.1 | 83.1 | 0.141 | 27.5 |
| SCNeSt -50-FPN | 89.6 | 81.2 | 85.2 | 0.136 | 27.5 |
| ResNet-101-FPN | 80.2 | 69.8 | 74.6 | 0.134 | 44.5 |
| SCNet-101-FPN | 82.5 | 83.2 | 82.9 | 0.135 | 44.6 |
| ResNeXt-101-FPN | 87.9 | 85.3 | 86.5 | 0.121 | 44.2 |
| ResNeSt-101-FPN | 89.3 | 88.3 | 88.7 | 0.136 | 48.2 |
| SCNeSt -101-FPN | 92.7 | 90.1 | 91.3 | 0.125 | 48.1 |
| Basic Net | Target Detection Network | ROI Pooling | PS-ROI Align | Recall (%) | Recall (%) | F1 |
|---|---|---|---|---|---|---|
| SCNeSt-50 | R-FCN | 1 | 0 | 85.3 | 79.6 | 82.3 |
| 0 | 1 | 86.3 | 80.1 | 83.1 | ||
| SCNeSt-101 | R-FCN | 1 | 0 | 90.7 | 87.1 | 88.8 |
| 0 | 1 | 92.7 | 90.1 | 91.3 |
| Basic Net | Target Detection Network | NMS | Soft-NMS | Recall (%) | Recall (%) | F1 |
|---|---|---|---|---|---|---|
| SCNeSt-50 | R-FCN | 1 | 0 | 85.4 | 79.6 | 80.3 |
| 0 | 1 | 86.3 | 80.1 | 83.1 | ||
| SCNeSt-101 | R-FCN | 1 | 0 | 91.2 | 88.7 | 82.9 |
| 0 | 1 | 92.7 | 90.1 | 91.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Y.; Wan, G.; Liu, L.; Wang, J.; Wu, Y.; Xue, N.; Wang, Y.; Yang, R. Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data. Remote Sens. 2021, 13, 3193. https://doi.org/10.3390/rs13163193
Jia Y, Wan G, Liu L, Wang J, Wu Y, Xue N, Wang Y, Yang R. Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data. Remote Sensing. 2021; 13(16):3193. https://doi.org/10.3390/rs13163193
Chicago/Turabian StyleJia, Yutong, Gang Wan, Lei Liu, Jue Wang, Yitian Wu, Naiyang Xue, Ying Wang, and Rixin Yang. 2021. "Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data" Remote Sensing 13, no. 16: 3193. https://doi.org/10.3390/rs13163193
APA StyleJia, Y., Wan, G., Liu, L., Wang, J., Wu, Y., Xue, N., Wang, Y., & Yang, R. (2021). Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data. Remote Sensing, 13(16), 3193. https://doi.org/10.3390/rs13163193