1. Introduction
In the last couple of decades, light detection and ranging (LiDAR) has gained momentum in many applications that range from the mapping of atmospheric characteristics (density, composition, wind speed, direction) to the 3D mapping of terrain objects at very high resolutions, and in many scientific domains (e.g., atmospheric studies, forestry, bathymetry, urban physiognomy, the monitoring of Earth’s ice sheets, archeology, etc.) [
1,
2,
3,
4,
5,
6,
7].
LiDARs, as their name implies, estimate the elevation of an object by measuring the two-way time travel of light, more specifically laser, from the sensor to the targets. Nonetheless, LiDAR is a broad term that encompasses a large range of LiDAR systems with different configurations, laser wavelengths, pulse repetition frequency (controls the spatial sampling of the system), the type of the returned echoes, etc. Moreover, it is common for LiDAR systems to be equipped with multiple lasers that operate simultaneously to increase the sampling rates or surface, or have different optical wavelengths in order to accommodate different applications (e.g., visible green for bathymetry, and near-infrared for topography [
8]).
Perhaps the most significant difference between LiDAR systems is the way they record and process the returned echoes. In general, LiDAR systems can be grouped into two broad categories: discrete return systems, and full-waveform (FW) systems. Discrete return systems record a discrete number of returned ranging points as a series of x, y, and z coordinates known as point clouds. Some systems record only the first and last return echoes of targets within the travel path of the emitted light, while others can also record intermediate points, and some newer systems can also record the intensity [
9]. Discrete return LiDARs are characterized by their small footprints (<1 m) and their high point density (several points/m
2), and are generally mounted on aircrafts (e.g., planes, helicopters, unmanned aerial vehicles), and they are most commonly referred to as airborne laser scanners (ALS), or used on the ground (terrestrial laser scanners, TLS). Finally, given the very small footprint size and the very narrow field of view of the lasers used in ALS [
8], scanning mechanisms are used in order to increase the spatial coverage; the most common scanners are the oscillating mirror, rotating polygon, Palmer scan, and the Risley prisms scanner [
8].
The other category of LiDAR systems are the full-waveform (FW) systems, and these systems acquire a time-varying distribution of backscattered radiation from the different targets within the illuminated surface. Therefore, in some contexts, FW LiDARs could provide much richer information about the spatial arrangement of structures within their waveforms [
10]. In contrast to discrete LiDAR systems, FW LiDARs are almost exclusively spaceborne systems, and given the altitude and speed of the platform they are mounted on, FW systems are characterized by large footprint sizes (>10 m) and small sampling density. In addition, current FW systems are not equipped with sophisticated scanners; therefore, sampling is mostly performed along a single line. Therefore, to increase spatial coverage, recent spaceborne LiDAR systems are equipped with multiple lasers.
The first operational spaceborne LiDAR system was the LiDAR In-space Technology experiment (LITE), which operated in the cargo bay of the space shuttle Discovery during the STS-64 mission in September 1994 [
11]. LITE was built primarily to measure and detect clouds and aerosols in the troposphere and stratosphere, derive temperature and density profiles in the stratosphere at heights between 25 and 40 km, and to determine the heights of the planetary boundary layer [
11]. LITE was equipped with two redundant flashlamp-pumped Nd:YAG lasers which were frequency-doubled and -tripled to provide simultaneous output pulses of 1064 nm, 532 nm, and 355 nm, with a pulse repetition frequency (PRF) of 10 Hz. At the surface, the laser beam spread to approximately 470 and 290 m for, respectively, the 1064 and 532 nm beams, and footprints were spaced every 740 m [
11]. During its 11-day mission, LITE collected almost two million laser pulses [
11].
After the LITE instrument, the Geoscience Laser Altimeter System (GLAS) on board the Ice, Cloud and Land Elevation Satellite (ICESat) became operational in 2003 and was decommissioned in 2009 [
12]. During its mission, GLAS made a total of 1.98 billion laser altimetry and atmospheric measurements. However, not all acquired GLAS footprints were exploitable due to laser anomalies [
13] as well as atmospheric conditions. In a study conducted by Baghdadi et al. [
14], it was reported that only 32.8% of acquired GLAS waveforms were viable for further processing for forestry applications.
In 2019, a new full-waveform (FW) spaceborne LiDAR mission became operational through the Global Ecosystem Dynamics Investigation (GEDI) instrument on board the International Space Station (ISS) for a two-year nominal duration. GEDI’s main objective is to provide information about canopy structure, biomass, and topography [
15]. GEDI’s main instrument comprises three lasers emitting 1064 nm light, with a PRF of 242 Hz. One of the lasers’ output is split into two beams called coverage lasers, while the remaining two remain at full power, thus producing a total of four beams. Next, laser output is rapidly deflected by 1.5 mrad using beam dithering units (BDUs) in order to produce eight tracks of data on the ground. Four of these tracks are coverage tracks, and four are full power tracks. The eight produced tracks are separated by ~600 m across-track, with a footprint diameter of ~25 m and a distance between footprint centers of 60 m along-track [
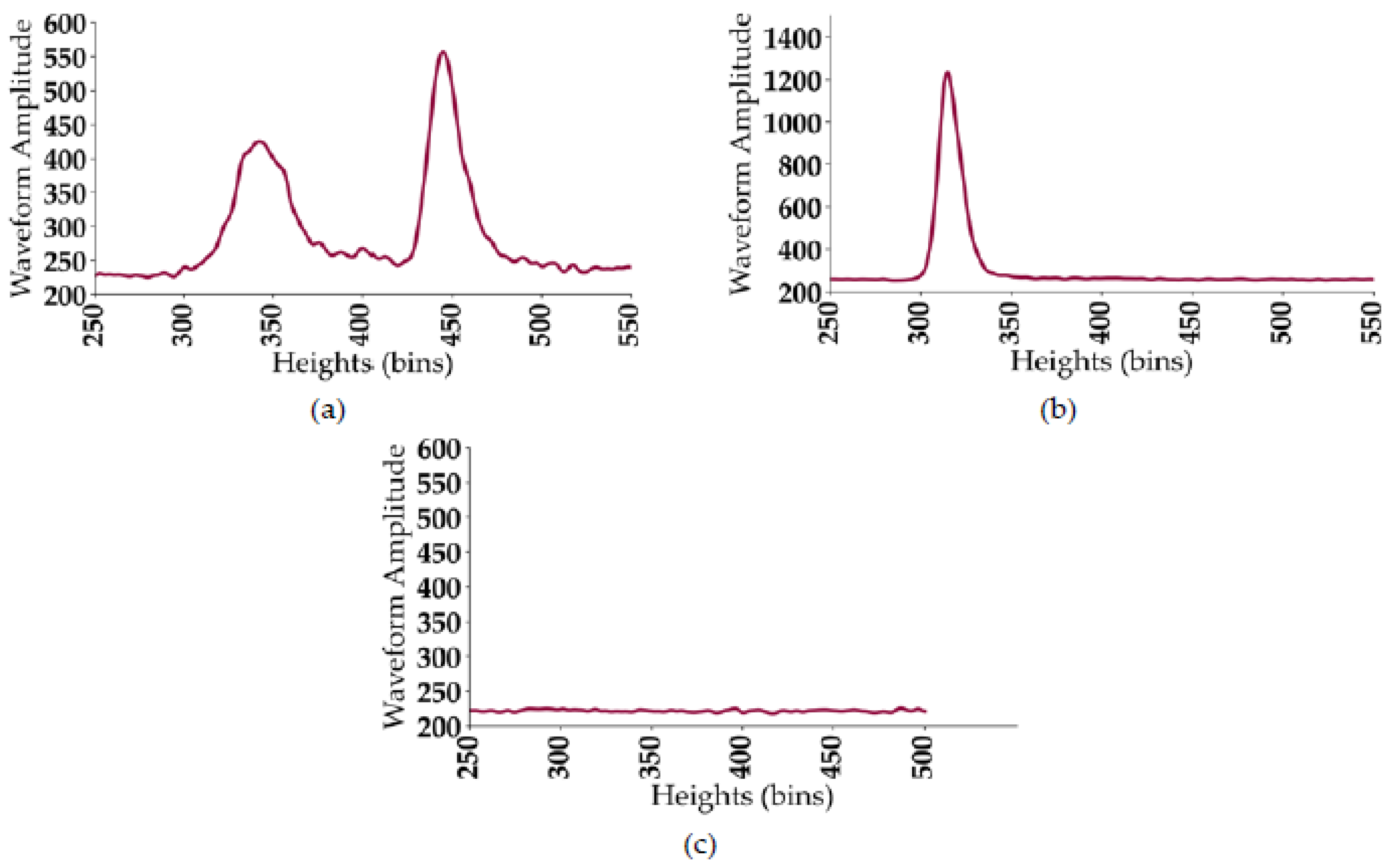
15]. The echoed waveforms are digitized to a maximum of 1246 bins with a vertical resolution of 1 ns (15 cm), corresponding to a maximum of 186.9 m of height ranges, with a vertical accuracy over relatively flat, nonvegetated surfaces of ~3 cm [
15] and about 10–20 m horizontally. GEDI resembles ICESat-1 by the way it measures vertical structures (i.e., waveforms); however, given GEDI’s higher PRF (242 vs. 40 Hz for ICESat-1), and its much smaller footprint size (~25 vs. ~60 m for ICESat-1), GEDI should provide a much denser database, and, along with its smaller footprint size, improved measurements over forested areas with high sloping terrain.
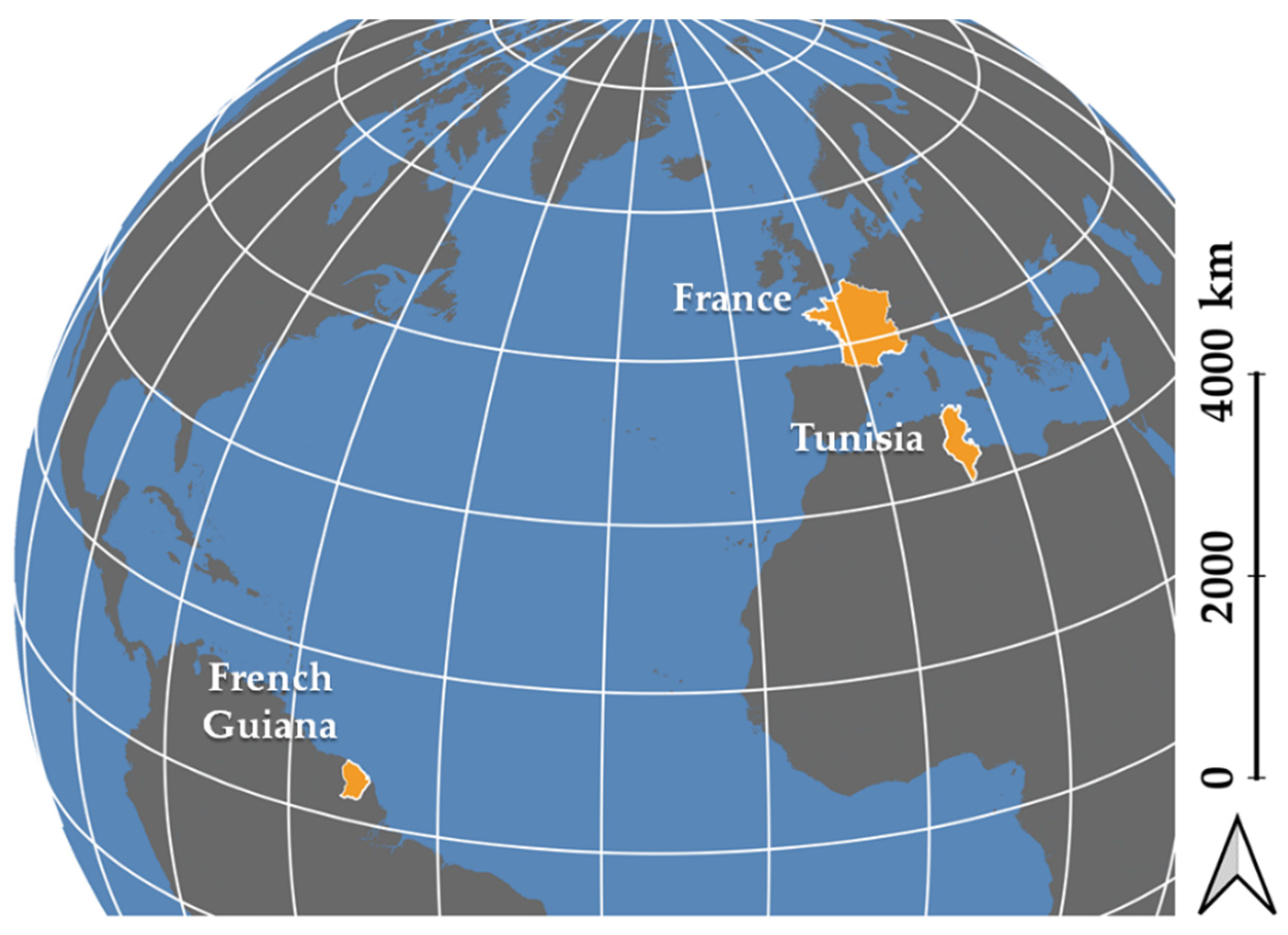
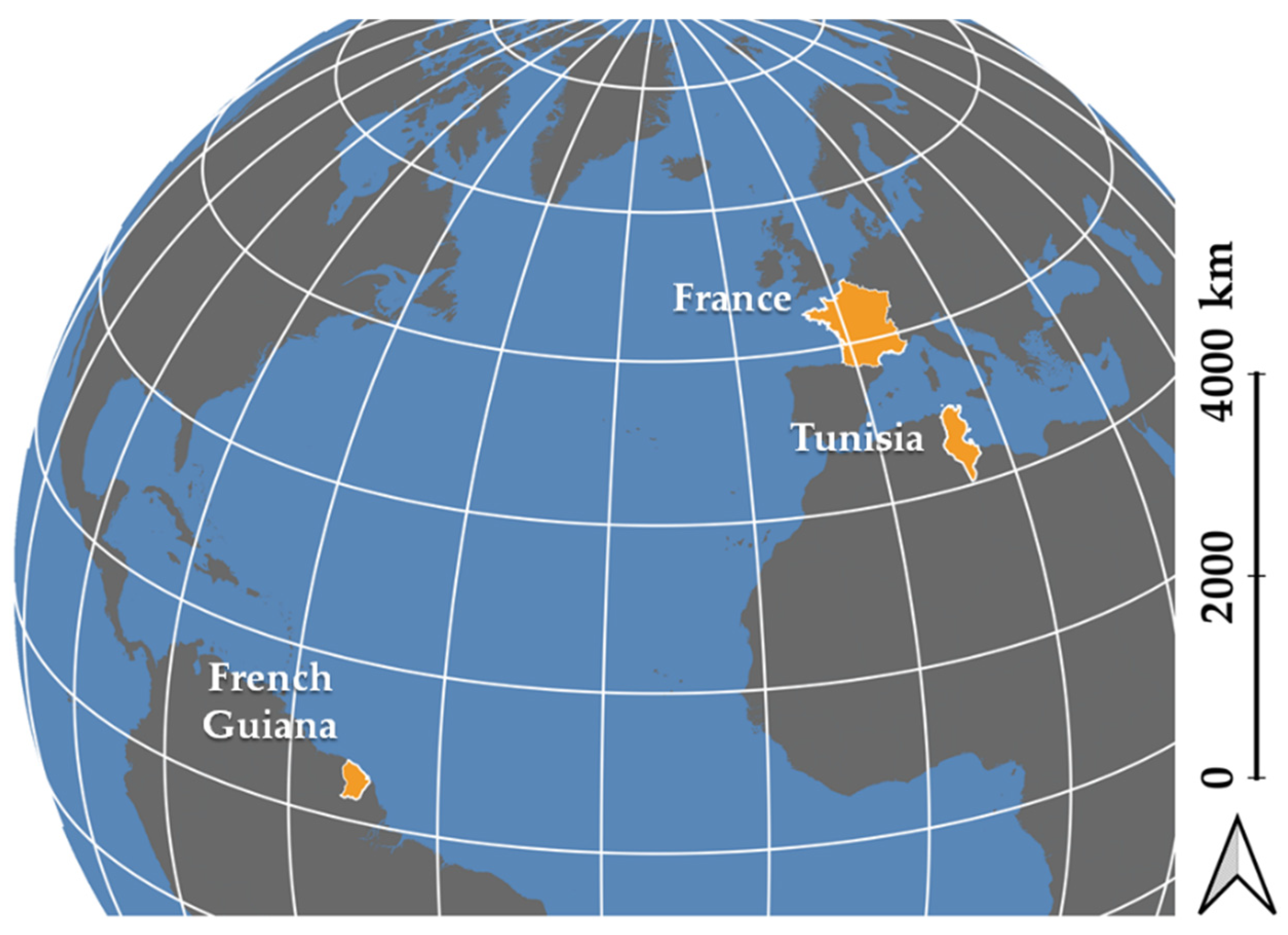
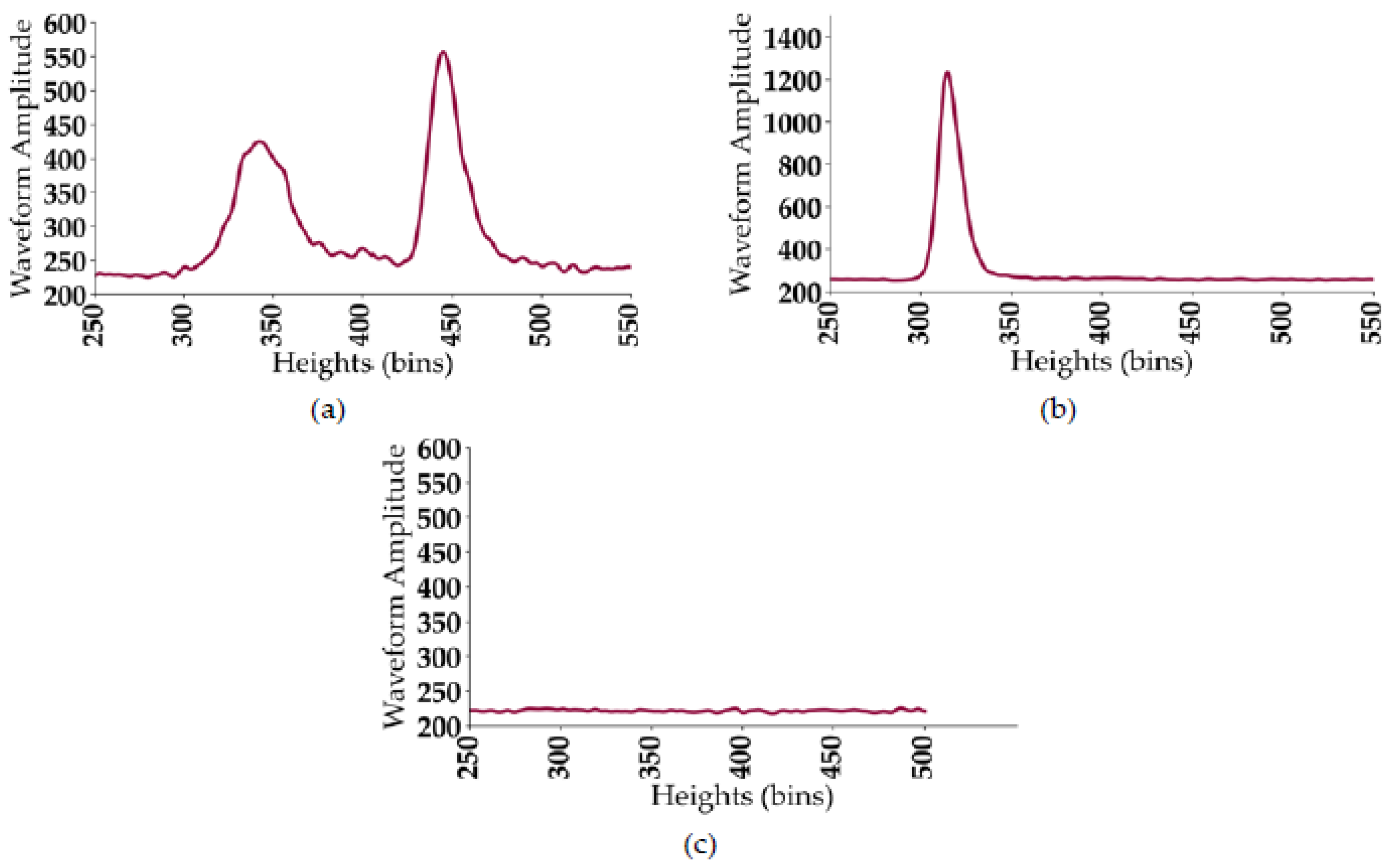
In its first 18 months of operation, GEDI has acquired over 25 billion waveforms globally. Nonetheless, similar to its predecessor, GEDI’s waveforms are affected by instrumental and atmospheric conditions. Therefore, the objective of this study is to analyze the effects of instrumental and atmospheric conditions on the viability of acquired GEDI waveforms. In this study, we consider a GEDI waveform as viable if the number of detected modes or peaks is higher than one. In fact, one or more detected modes indicate that the transmitted waveform made at least one contact on the ground, while waveforms with no detectable modes represent only noise. The study was conducted on GEDI data acquired over three countries with different climatic conditions: France, on the western edge of Europe; Tunisia, on the Mediterranean coast of Northwest Africa; and, finally, French Guiana, an overseas department and single territorial collectivity of France on the northern Atlantic coast of South America. The atmospheric data used were provided by the Meteosat Second Generation satellites and MODIS.
The paper is organized in four sections. After the introduction, the materials and methodology are presented in
Section 2, followed by the results and discussion in
Section 3, and, finally,
Section 4 presents the main conclusions.
3. Results and Discussion
The results presented in the following sections represent the analysis results over the combined data from the three study sites. As the results were similar for each study site, a decision was made to combine the data from the three sites in order to obtain a larger dataset with more robust conclusions.
3.1. Overall Quality of GEDI Acquisitions
The results presented in
Table 2 show that, due to favorable climatic conditions (less frequent clouds), the highest number of viable GEDI acquisitions is observed over Tunisia with 81.7% of the 12.59 M acquisitions. Over France and French Guiana, the number of viable shots decreases to, respectively, 55.3% and 48.5%.
For the three countries, the percentage of viable GEDI shots correspond mostly to cloud-free acquisitions, with 83.0% of viable shots acquired in the absence of clouds over Tunisia, 65.5% over France, and 52.4% over French Guiana. Nonetheless, GEDI acquisitions could still be viable even over cloudy acquisitions, in particular for France (34.5% of shots) and French Guiana (47.6%). These viable cloudy acquisitions were most likely acquired in the presence of thin or transparent clouds that do not critically attenuate the LiDAR signal.
For nonviable shots, the majority of these shots were acquired in the presence of clouds; 73.7% of shots were nonviable over Tunisia, 91.4% over France, and 83.5% over French Guiana (
Table 2). Over the three countries, 90% of nonviable GEDI acquisitions were due to atmospheric conditions (cloud presence), in contrast to 10% due to mostly instrumental factors.
3.2. Comparison between GEDI and SRTM DEM Elevations
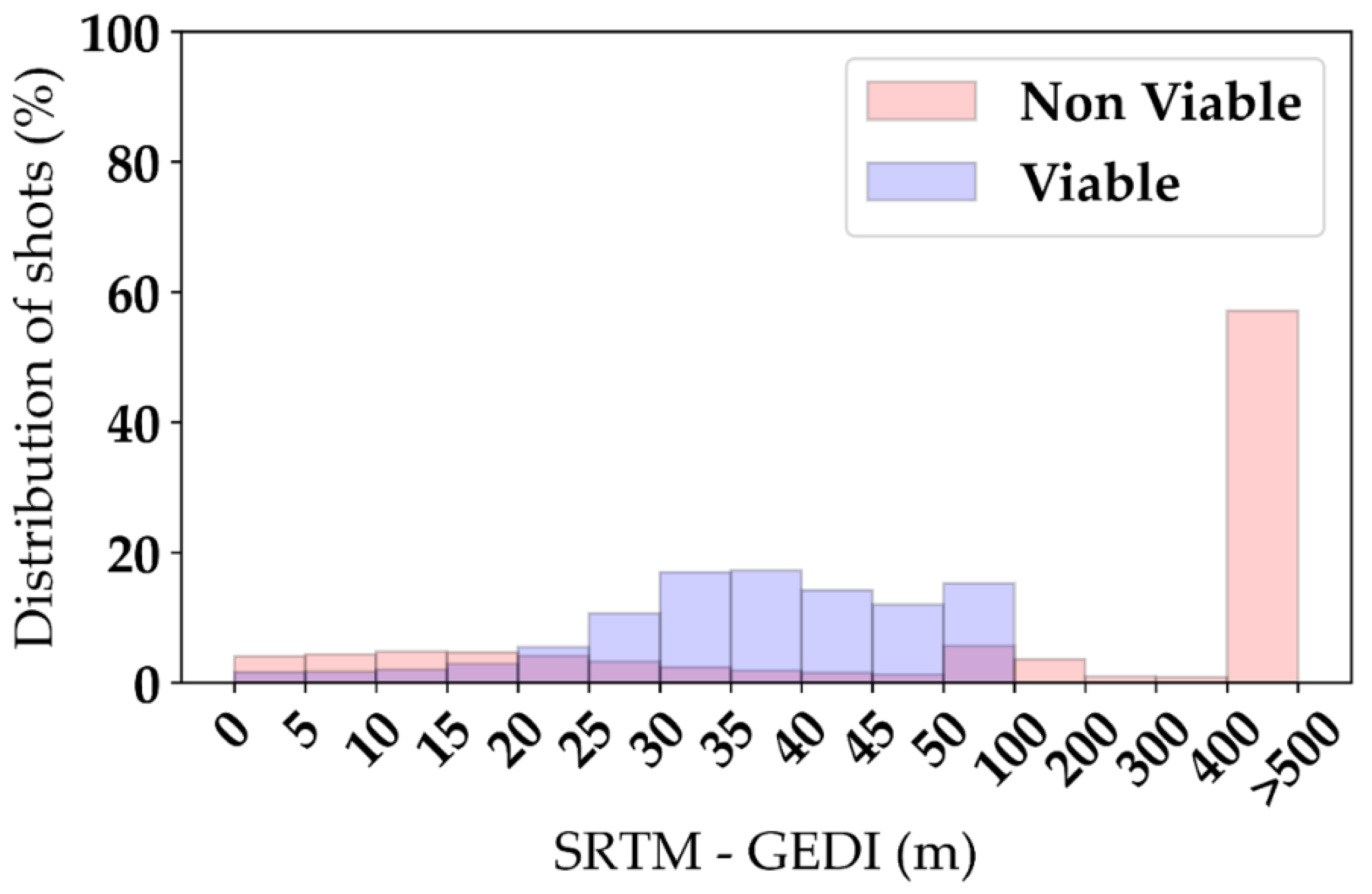
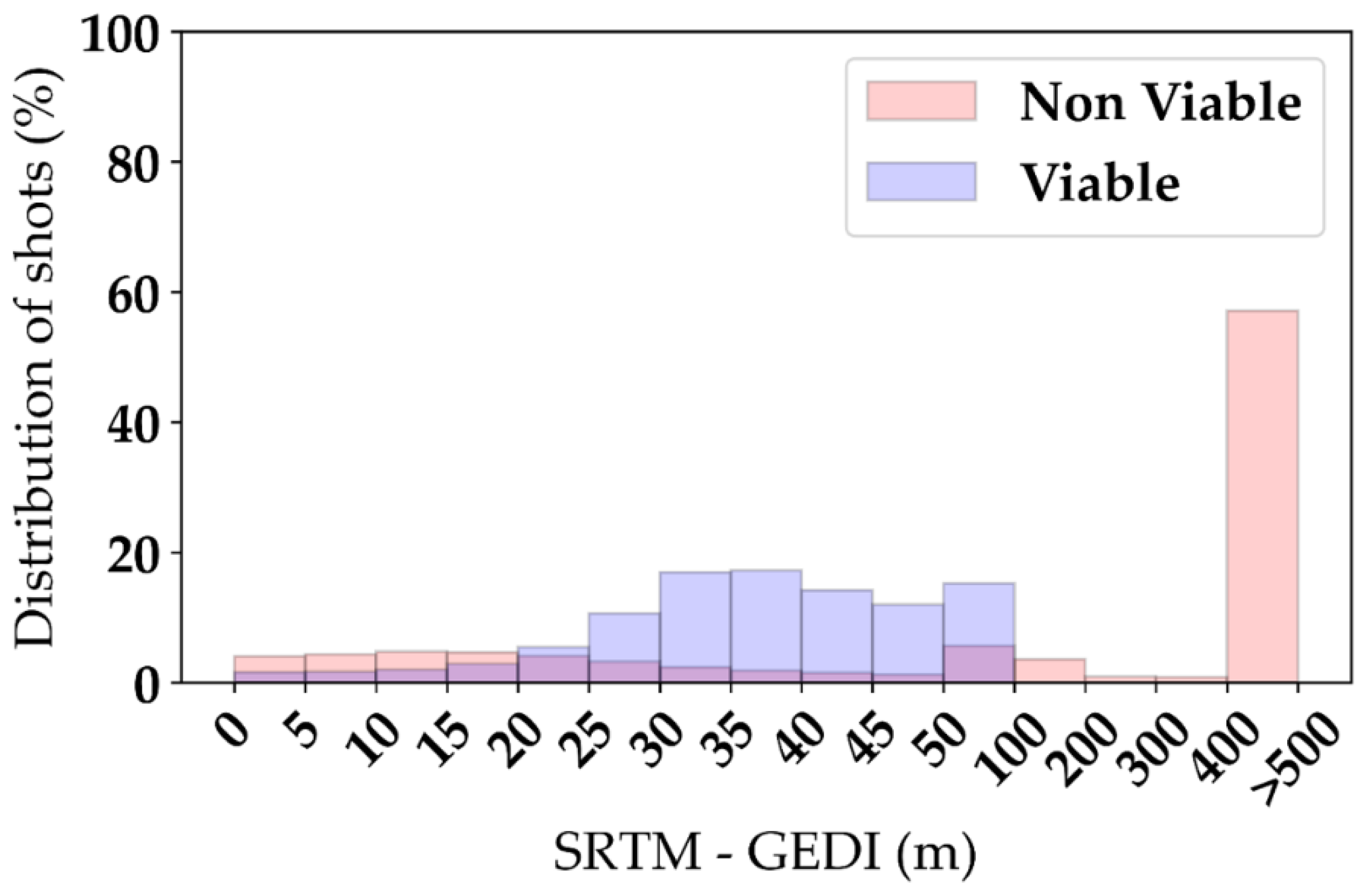
We also compared GEDI elevations to the SRTM DEM elevations at 30 m resolution. In this study, we used the variable elevation called elev_lowestmode, which corresponds to the elevation of the center of the last-detected mode (essentially the ground elevation). It should be noted that the reported ground elevation is accurate only for viable shots. For nonviable shots, the reported elevation is not accurate, as it could correspond to the elevation of the clouds (if no penetration of the LiDAR signal occurred). The analysis carried out on the whole database (three countries with ~103 M shots) shows that for the nonviable data, 96.5% of the GEDI elevations have a difference of greater than 50 m from the SRTM DEM elevations, and close to 70% of the elevations have a difference of greater than 400 m. For viable data, 86% of GEDI shots have elevations within 50 m of SRTM data, and the remaining 14% have a difference between 50 and 100 m.
The comparison of GEDI and SRTM elevations over French Guiana (study site with almost exclusively forest cover) shows that close to 85% of the difference between SRTM and GEDI elevations is less than 50 m, with the remaining differences (~15%) being less than 100 m (
Figure 3). The obtained results show a good agreement between the elevations of viable GEDI shots and SRTM DEM elevations as the canopy height map of French Guiana displays canopy heights reaching 55 m [
21]. Indeed, Bourgine and Baghdadi [
22] assessed the C-band SRTM DEM over French Guiana and found that the accuracy of elevations is about 10 m (standard deviation of errors). Moreover, in their study they reported that the elevations provided by the SRTM DEM correspond to the elevation of the canopy cover in addition to a slight penetration (between 2.3, for very dense forests, and 8.5 m, in comparison to aerial laser scanning (ALS) elevations, with the highest bias corresponding to the most dense forest areas). Therefore, and as an example, for canopy heights of about 55 m, the difference between the elevations provided by the SRTM DEM (elevation of canopy cover—minimum penetration) and a viable GEDI shot’s elevation (ground elevation) would be in the order of ~50 m (55 m–2.3 m).
3.3. Quality of Cloud-Free GEDI Acquisitions
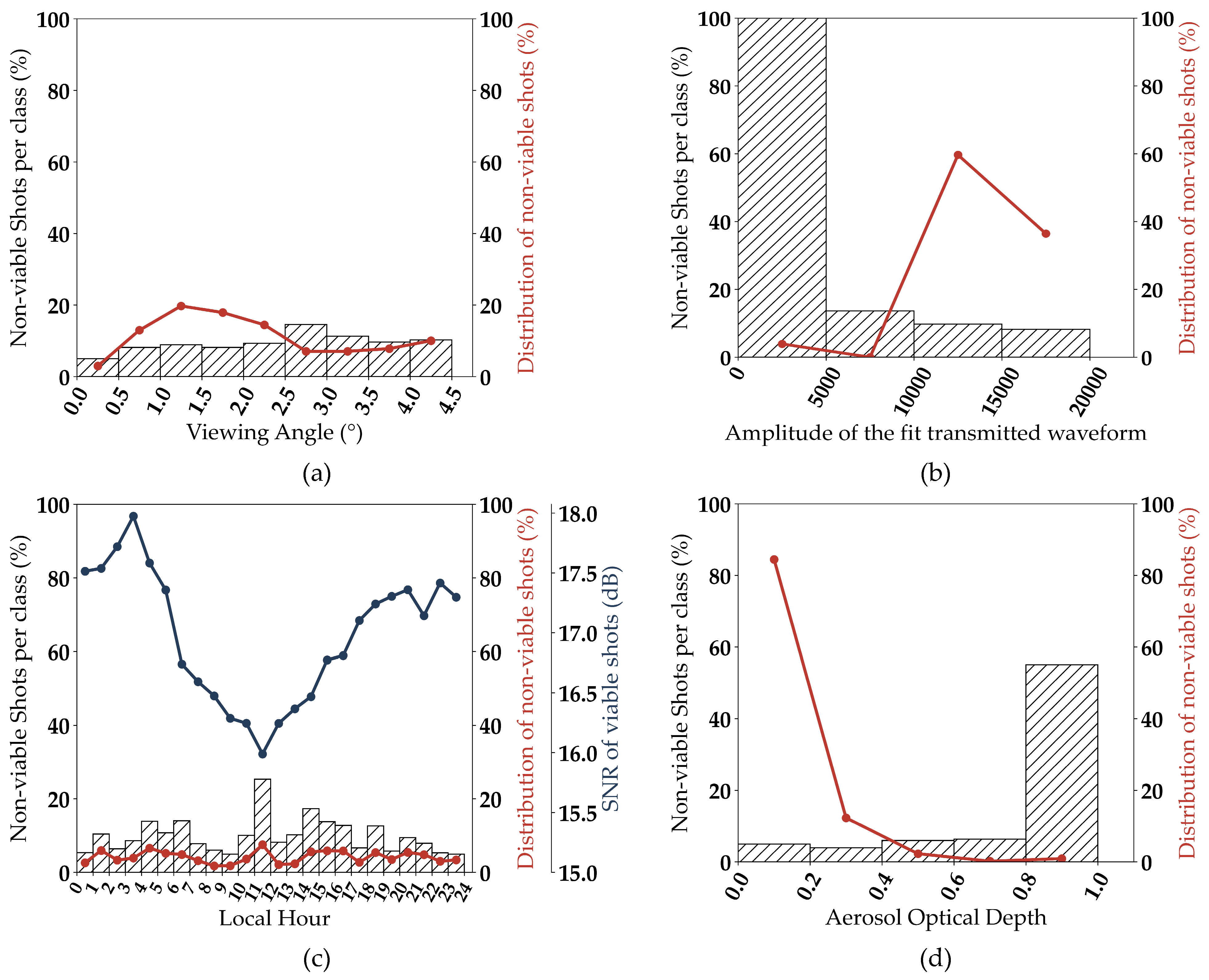
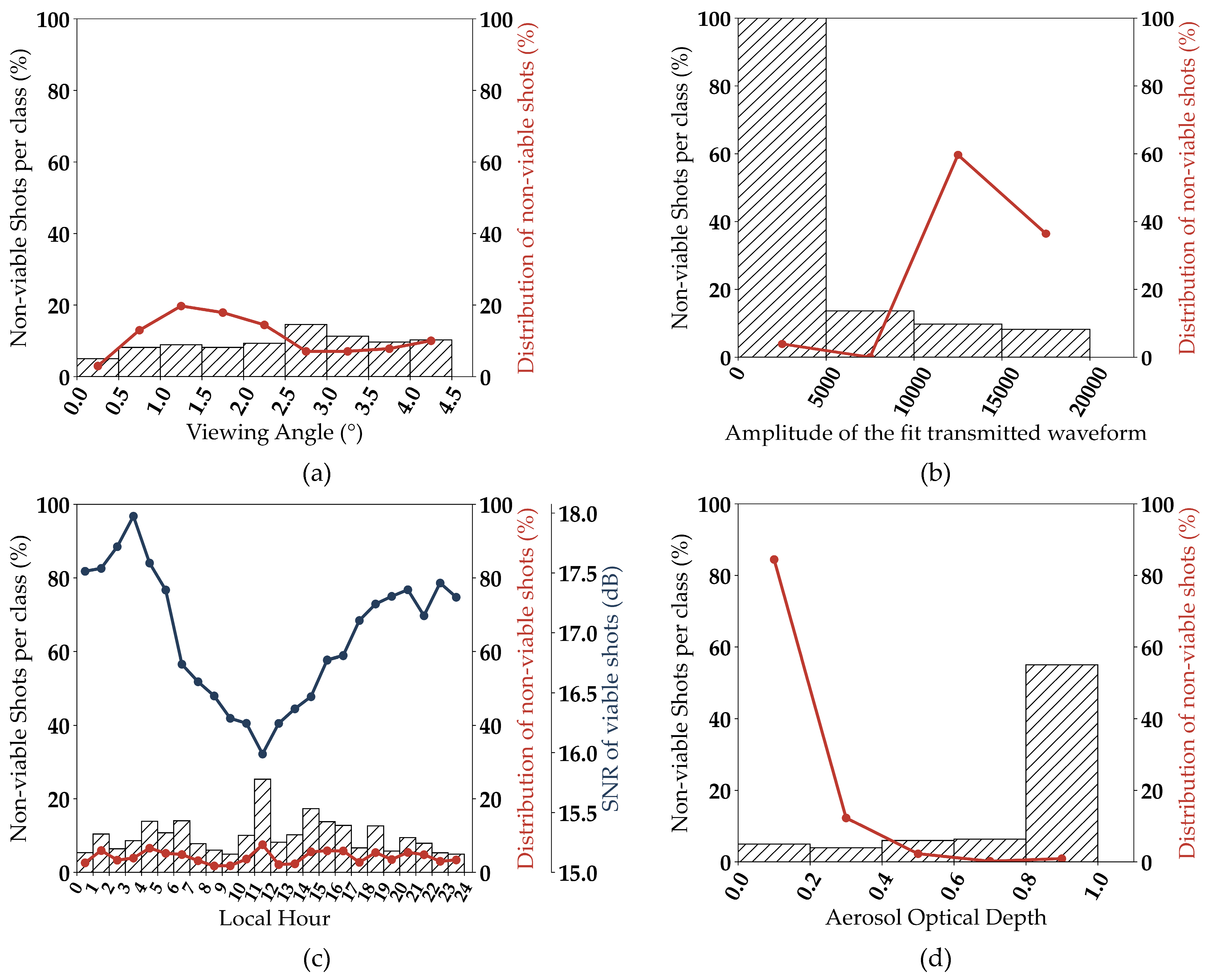
In this section, we analyzed the dependency between the nonviable cloud-free GEDI data and instrumental factors (viewing angle (VA), amplitude of fit-transmitted waveform (ATW)), and other factors, such as the time of acquisition (local hour (LH)) and aerosol optical depth (AOD). The analysis is based on the combined GEDI data over the three countries (43.8% of all the acquired data were cloud-free).
The results presented in
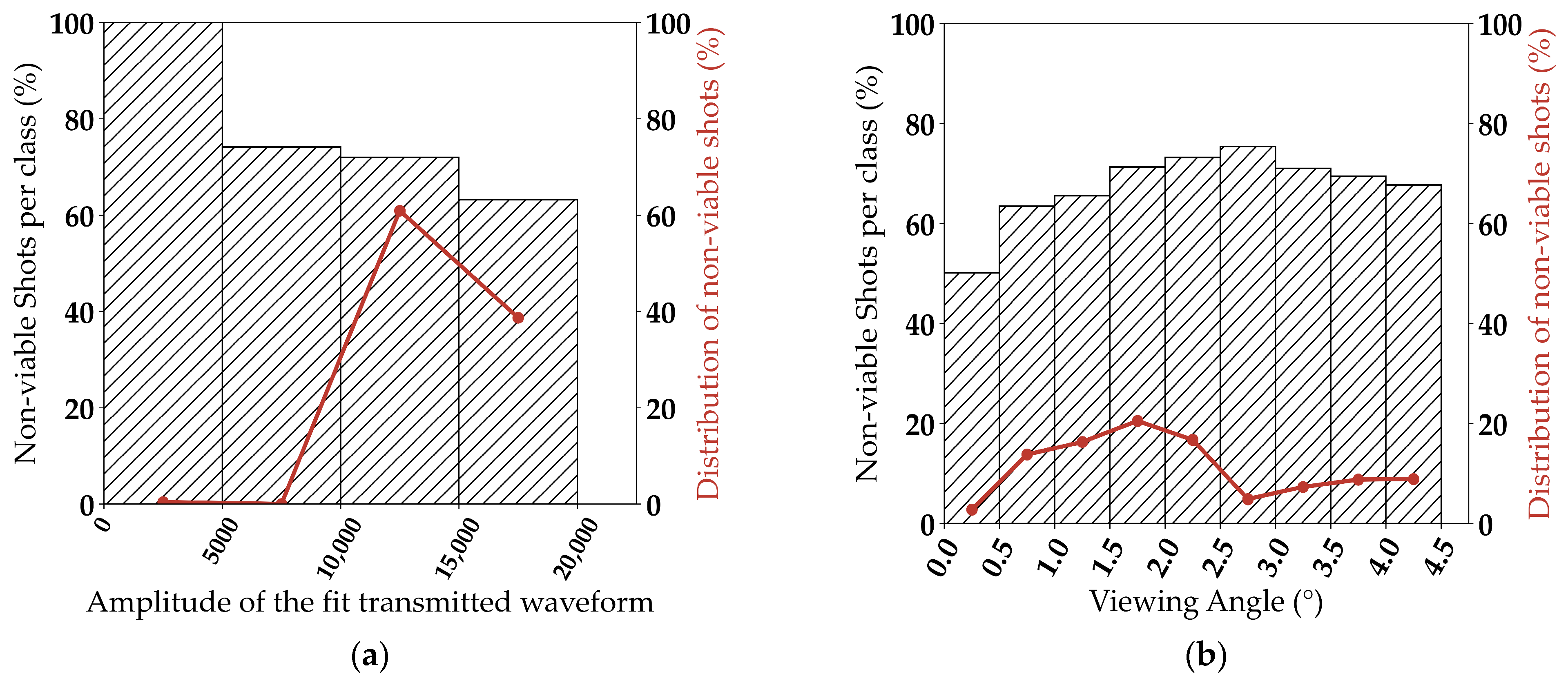
Figure 4a show that the percentage of nonviable shots slightly increases with increasing VA. In fact, less than 5% increase was observed, in nonviable shots, between GEDI data acquired with low VA (≤0.5°) and those acquired with a relatively large VA (≥2.5°).
Regarding the amplitude of the fit-transmitted waveform (ATW),
Figure 4b shows that all the shots with ATW lower than 5000 were nonviable. Nonetheless, GEDI acquisitions with ATW lower than 5000 represent less than 5% of all GEDI acquisitions. For acquisitions with higher ATW (ATW ≥ 10,000), the influence of the amplitude of the transmitted waveform on the viability of the shots is very weak, as only a very light decrease of nonviable shots was observed with increasing ATW. These results indicate that the ATW of the majority of GEDI acquisitions (more than 95%) is optimal and ensures received waveforms with good quality.
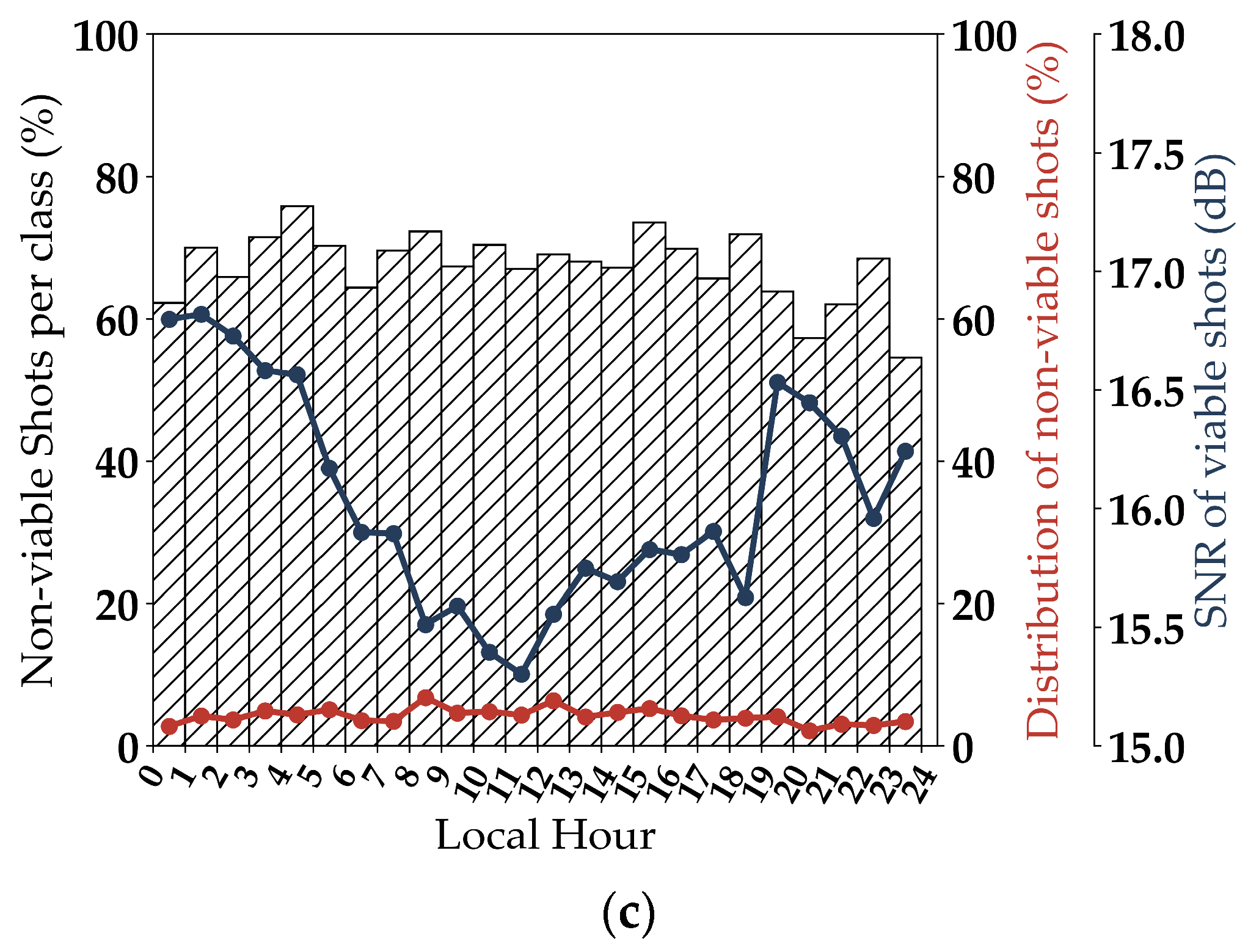
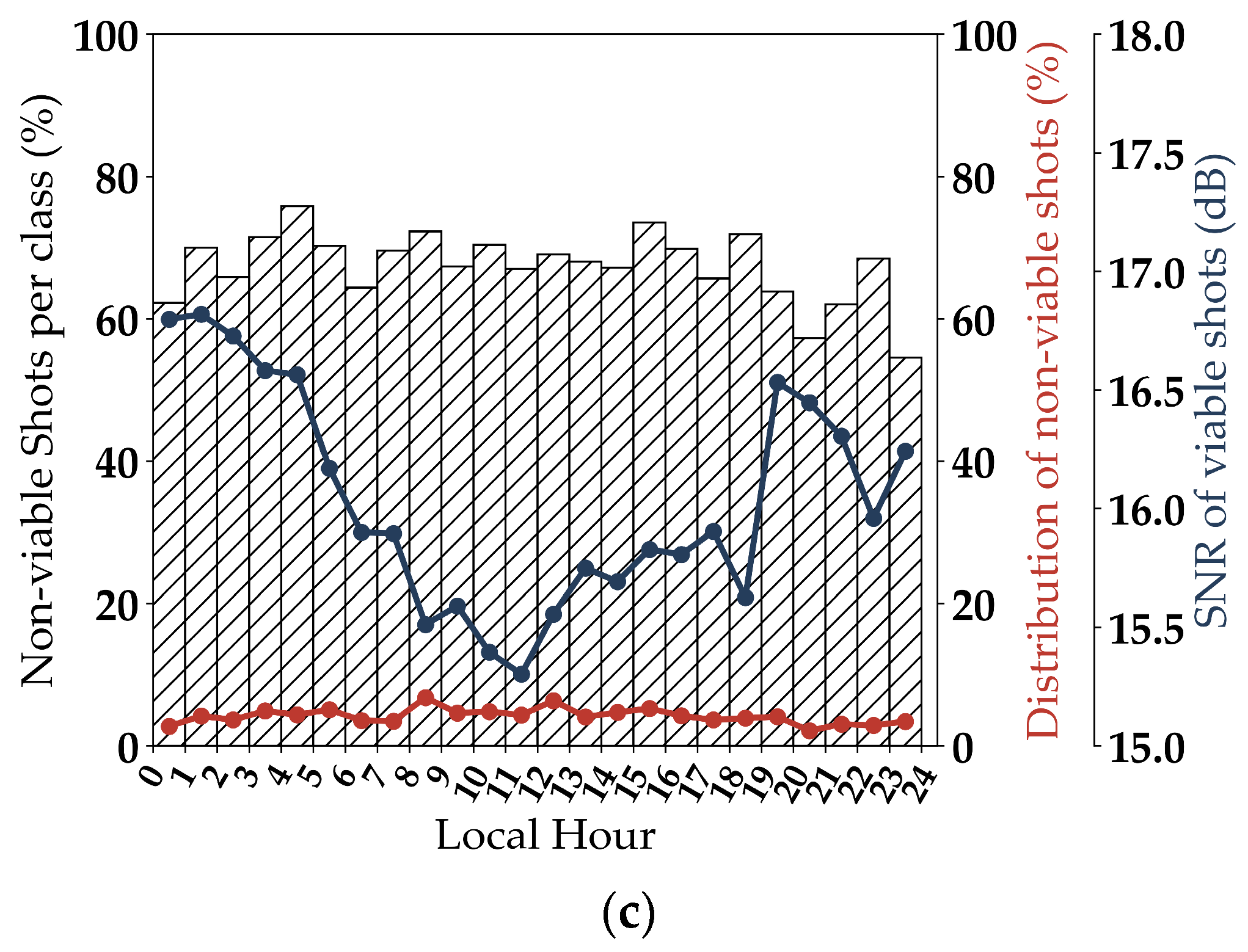
Regarding the effect of acquisition time on the viability of GEDI waveforms, the results presented in
Figure 4c show that the percentage of nonviable shots is highest around noon (between 11 am and 12 pm local time), with around 25% of the total shots being nonviable. Indeed, it is known that the amount of solar radiation is at a maximum around 12:00 (noon) when the sun is directly overhead [
14]. The high noise induced by the solar radiation could explain the higher percentage of nonviable shots acquired between 11:00 and 12:00 local time. Moreover, solar radiation noise also affects the quality of the viable footprints. Indeed, our analysis of the signal-to-noise ratio (SNR, defined as 10 × log
10 of the ratio of the difference between the maximum amplitude and the mean background noise to the standard deviation of the background noise) showed that the acquisitions with the lowest SNR were footprints acquired between 11:00 and 13:00 local time, with SNR differences reaching almost 2dB between footprints acquired around noon (lowest SNR) and those acquired in the early morning or late at night (highest SNR) (
Figure 4c, SNR of viable shots).
Finally, we analyzed the effect of the presence of aerosol particles (AOD) on the nonviability of acquisitions. The results in
Figure 4d show that around 55% of GEDI acquisitions with high AOD (≥0.8) were nonviable, in contrast to less than 15% for AOD ≤ 0.4. However, the percentage of shots acquired with AOD ≥ 0.8 represent less than 0.4% of all acquisitions. This can be related to the expected signal attenuation for a two-way transmission through a layer of varying optical thickness. Aerosol optical depths of 0.1, 0.2, 0.4, 0.8, and 1.2 will, respectively, yield a signal attenuation of 18%, 33%, 55%, 80%, and 90%. From these figures, we can estimate that the GEDI LiDAR signal level enables a significant fraction of viable shots to be recorded as long as the aerosol optical depth remains below 0.4, while optical depths greater than 0.8 will block about half of the signal, and optical depths greater than 1.2 are likely to completely prevent acquisitions of viable shots.
3.4. Quality of Cloudy GEDI Acquisitions
The nonviability of GEDI acquisitions in the presence of clouds is mostly related to the cloud attenuation or multiple scattering by clouds on the backscattered LiDAR signal. This is evident by the fact that the percentage of nonviable GEDI waveforms increased from 9.5% over cloud-free acquisitions (number of cloud-free nonviable shots divided by the number of all cloud-free shots) to 66.9% over cloudy acquisitions (number of cloudy nonviable shots divided by the number of all cloudy shots). The effects of multiple scattering by clouds on the backscattered LiDAR signal are well known [
23]. In general, scattered photons take a longer path than photons that travel in a clear medium, which increases their travel time and biases their range measurements [
24,
25], and sometimes photon travel time is stretched beyond recognition [
26]. Moreover, given the narrow field-of-view of the receiver, the backscattered photons may not even be captured by the instrument. Nonetheless, not all cloudy GEDI acquisitions are affected in the same manner, as the composition of the clouds (e.g., cloud optical thickness, water content), as well as their elevation and temperatures, play a major role in the multiple scattering and attenuation of the LiDAR signal [
23,
24,
25,
26].
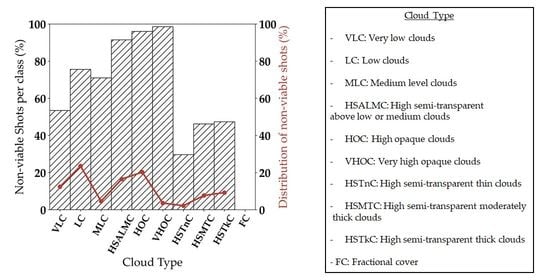
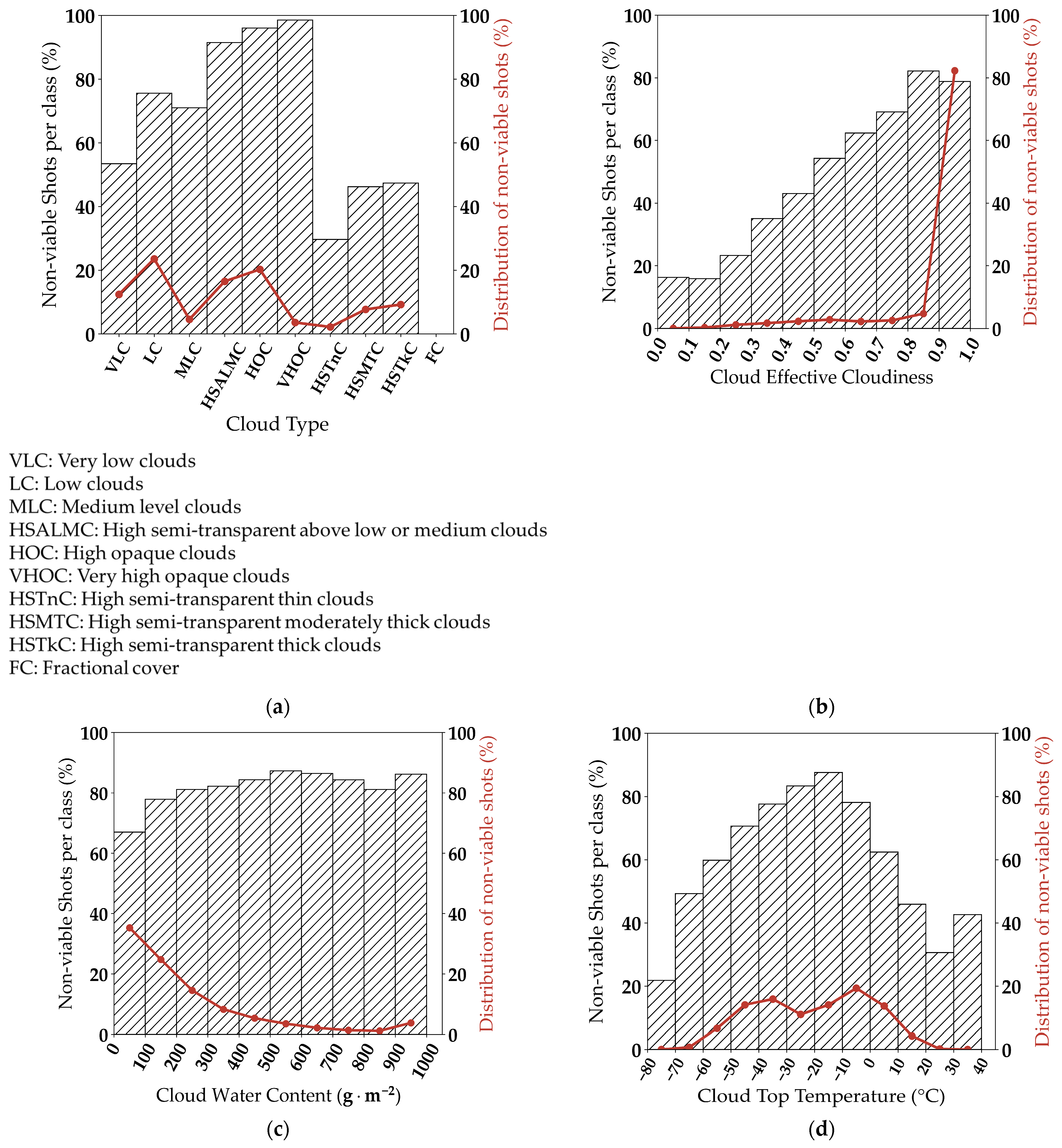
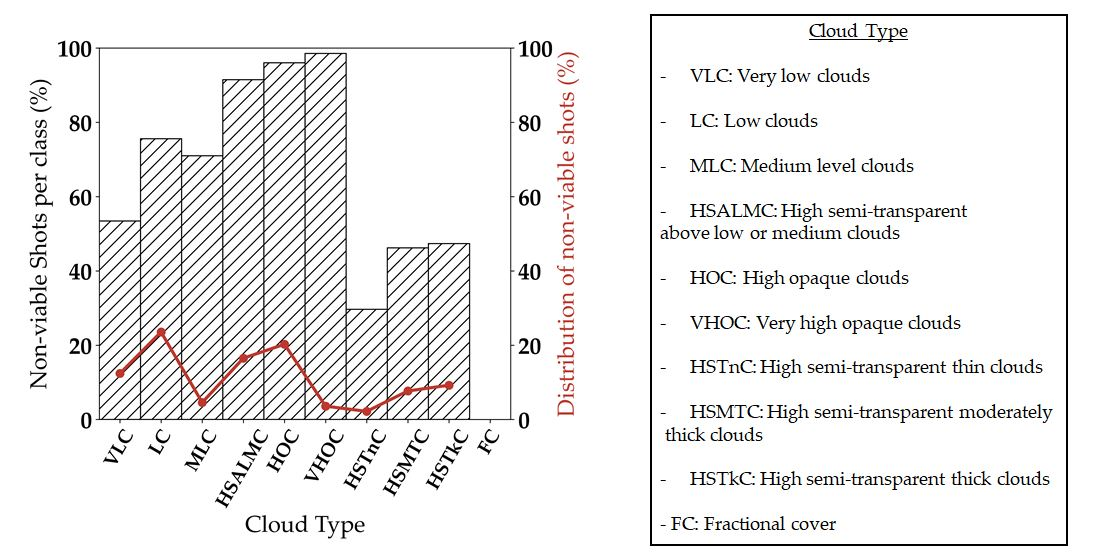
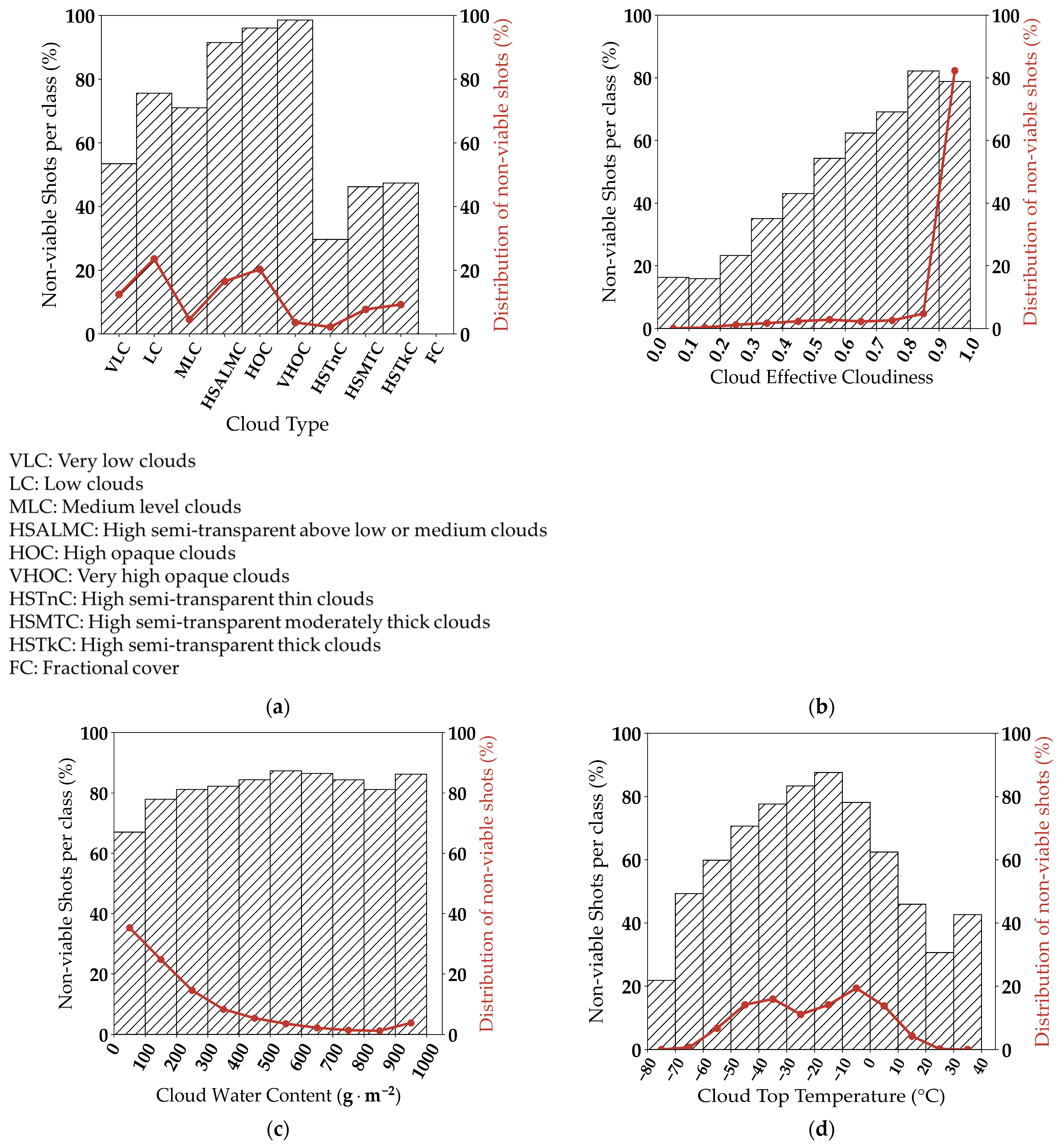
Figure 5a shows that for semitransparent clouds, only 30% to 40% of shots were nonviable. This percentage of nonviable shots increased to more than 90% to 100% for clouds with higher opacity. The relationship between cloud opacity and the nonviability of GEDI shots is shown in more detail in
Figure 5b.
Figure 5b shows that for a cloud effective cloudiness (CEC) between 0 and 0.2 (i.e., very semitransparent clouds), the percentage of nonviable shots is less than 20%, and this percentage increases to more than 75% for CEC greater than 0.8 (i.e., very opaque clouds or fully cloudy pixels).
For very low-, low-, and mid-level clouds (
Figure 5a), the percentage of nonviable shots increased from ~58% for very low-level clouds to more than 75% for both low- and mid-level clouds. This increase is mostly related to the cloud water content (CWC) of the clouds (calculated from MODIS data), which increased from ~190 g/m
2 for the very low clouds to ~230 g/m
2 for low clouds and ~200 g/m
2 for mid-level clouds. The effects of CWC on the nonviability of GEDI is shown in detail in
Figure 5c. Indeed, for CWC between 0 and 100 g/m
2, 70% of acquired shots were nonviable, while this percentage increased to around 80% for CWC greater than 100 g/m
2.
Regarding cloud temperatures,
Figure 5d shows that the percentage of nonviable shots increased when cloud temperatures increased from −80 °C (20% of shots are nonviable) to around 0 °C (80% of shots are nonviable). Then, for positive temperatures, the percentage of nonviable shots decreased to 40% for temperatures higher than 10 °C. The decrease of the percentage of nonviable shots with decreasing temperatures (e.g., for temperatures ≤−20 °C) is consistent with the fact that higher and colder clouds have higher probability of being thin semitransparent cirrus that can be transparent to LiDAR beams (slight or no attenuation of the LiDAR signal). With increasing temperatures (>−20 °C), the amount of ice crystals decreases and, thus, the percentage of nonviable shots increases due to the increased presence of water droplets that attenuate the LiDAR signal. Indeed, the average CWC at temperatures lower than −20 °C is 159.1 g/m
2 and increases to 247.3 g/m
2 for temperatures between −20 and 0 °C. Moreover, liquid clouds tend to have higher extinction due to higher particle concentrations than ice clouds, and are therefore more likely to completely block the LiDAR signal. For cloud temperatures between 0 and 10 °C, almost 60% of acquired shots are nonviable and this is again due to the presence of water droplets (average CWC of 199.3 g/m
2). Finally, for cloud temperatures higher than 10 °C, the percentage of nonviable shots decreases to almost 40% due to the decrease in CWC, which has an average of 166.4 g/m
2. It is also consistent with the fact that very low and warmer clouds tend to be fractional clouds that let the LiDAR signal partly pass through.
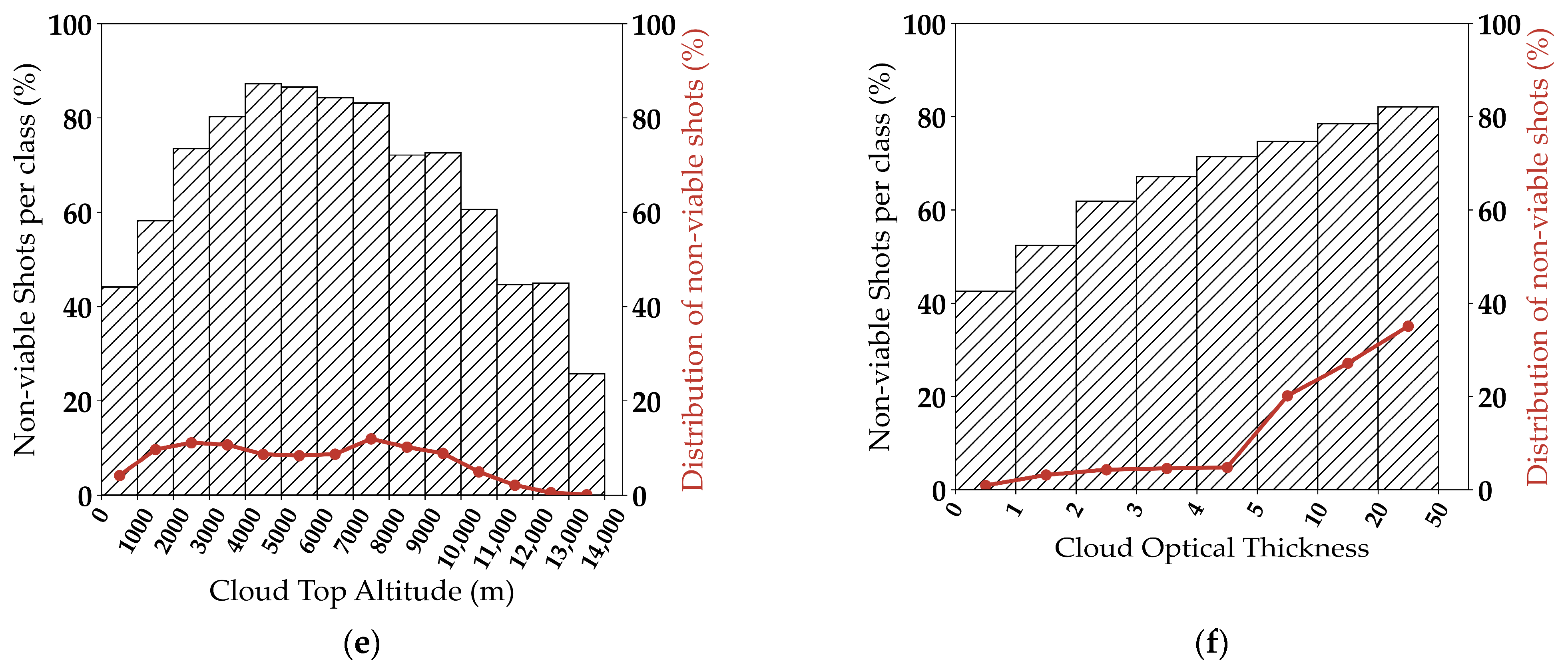
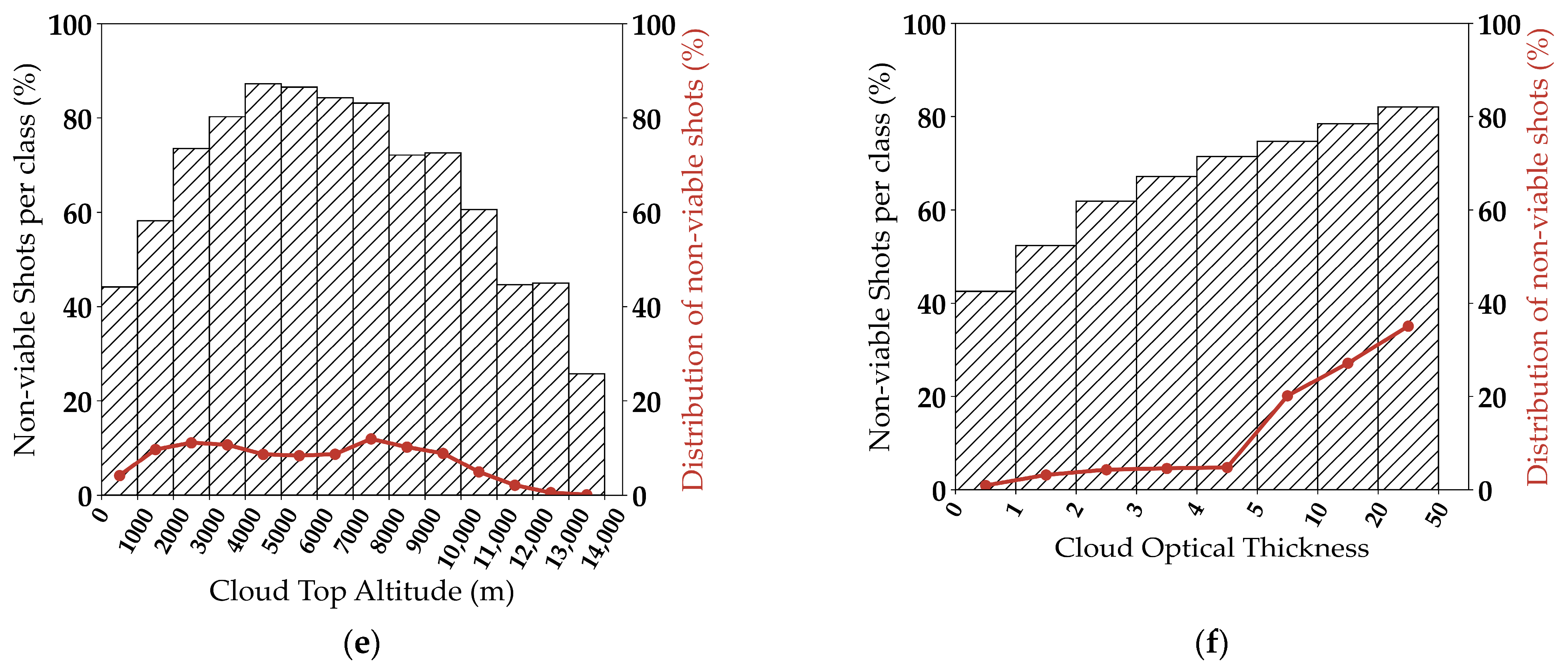
Moreover, results presented in
Figure 5e show that the percentage of nonviable shots is the highest for clouds located at heights between three and eight km (~80% of shots are nonviable). These middle clouds include altocumulus and altostratus clouds. These clouds are usually composed of a higher content of liquid water droplets (average CWC of 241.8 g/m
2) than clouds located at altitudes lower than three km (average CWC of 209.2 g/m
2) and clouds higher than eight km (average CWC of 216.3 g/m
2). In fact, for the clouds at altitudes lower than three km, and those higher than eight km, the percentage of nonviable shots varied between 25% and 70%.
Finally,
Figure 5f shows that the percentage of nonviable GEDI shots increased with increasing cloud optical thickness (COT), similar to what was previously observed in the case of aerosols. For clouds, around 40% of nonviable shots were acquired when the COT was smaller than 1.0 and this number rapidly increased, reaching about 70% for optical thickness between 4.0 and 5.0, and 80% for COT greater than 20. It should be noted here that COTs greater than 3.0, corresponding to a signal attenuation of 99.7%, are most likely to yield 100% of nonviable shots if the cloud layer fully covers the GEDI field of view. Therefore, our interpretation of
Figure 5f is that viable shots are still reported, probably due to broken cloud covers that let signals pass through unattenuated. This is confirmed by the almost linear increase of nonviable shot percentages with increasing effective cloud fraction (panel b of
Figure 5). Effective cloud fraction corresponds to a radiatively equivalent cloud fraction such that a fully cloudy pixel with a low albedo can have the same radiative impact at the top of atmosphere (TOA) as a partly cloudy pixel containing broken clouds with a high albedo.
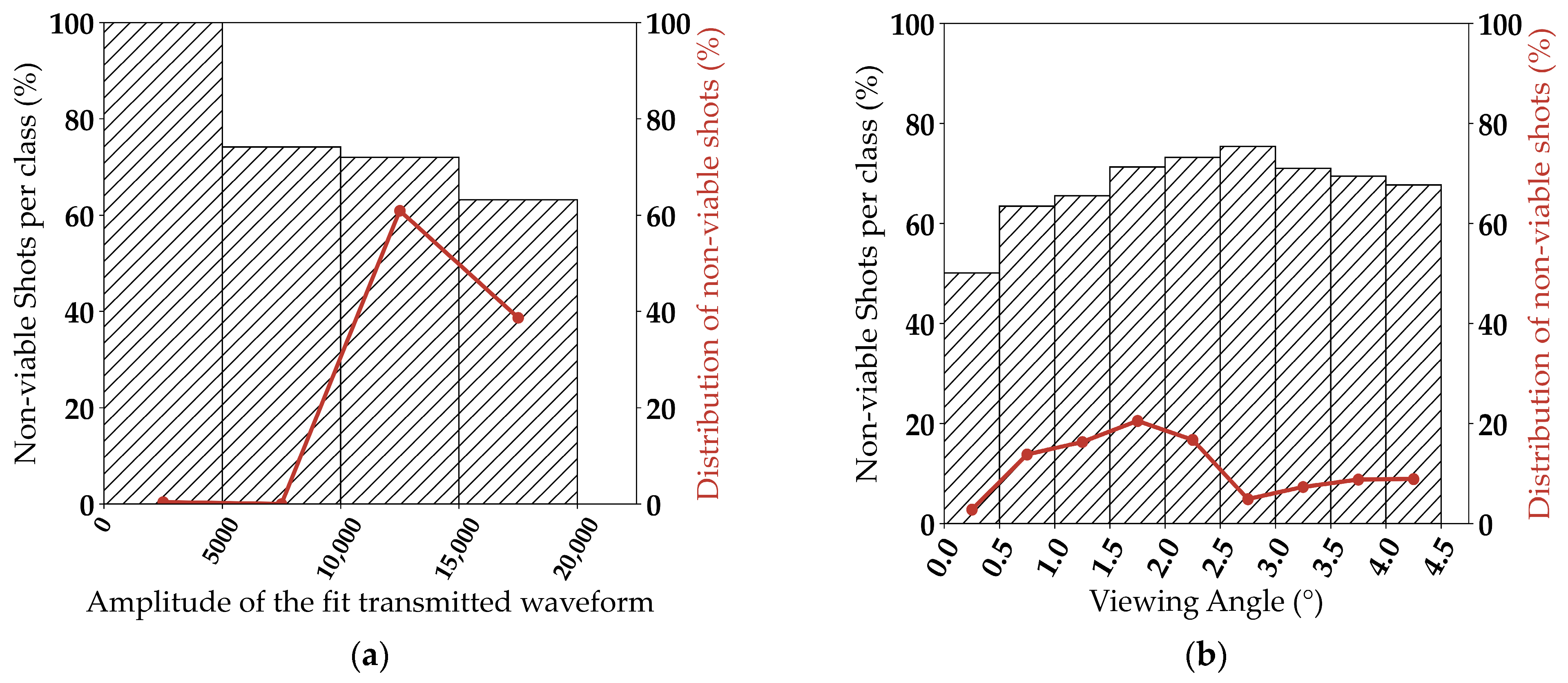
The effect of instrumental factors on the viability of GEDI shots acquired with cloudy conditions is similar to that of cloud-free acquisitions.
Figure 6a shows that the percentage of nonviable shots decreased with increased ATW. For ATW below 5000, all the acquired GEDI shots were nonviable, as with cloud-free acquisitions. For the majority of the remaining GEDI shots (ATW between 5000 and 20,000), we observed a 10% decrease in the percentage of nonviable shots with increased ATW between 5000 and 10,000 to ATW between 15,000 and 20,000.
Regarding the effect of the viewing angle,
Figure 6b shows an increase in the percentage of nonviable shots with increased VA. Indeed, the percentage of nonviable shots increased from around 50% for VA between 0° and 0.5° to around 70% for VA higher than 2°.
In contrast to cloud-free shots, the time of acquisition does not present any clear effect on the nonviability of GEDI shots acquired in cloudy conditions (
Figure 6c). This is mostly due to the presence of other factors (i.e., clouds) that have a stronger effect on GEDI’s LiDAR signal. Thus, the decoupling of the effect of solar noise from the other factors is not possible. Nonetheless, the effect of solar noise on the viable GEDI acquisitions is clear. Indeed, our analysis of the SNR of all viable shots in cloudy conditions showed that those acquired at noon had the lowest SNR (~1.5 dB difference to early morning acquisitions) (
Figure 6c, SNR of viable shots).
3.5. Variable Importance Analysis
To analyze which variable has the most effect on the viability of GEDI acquisitions, two variable importance tests were carried out. The first test considers only cloud-free acquisitions, while the second considers only cloudy acquisitions. Moreover, in the case of cloudy acquisitions, the tested atmospheric variables could be highly collinear, and the permutation of one variable might have a little effect on the model’s performance, as the model can obtain the same information from another correlated variable. Therefore, in the case of cloudy acquisitions, in addition to the variable importance of each factor, we calculated the combined variable importance of all the atmospheric factors (AF,
Table 1), as well as all the instrumental and acquisition time factors (IAF,
Table 1).
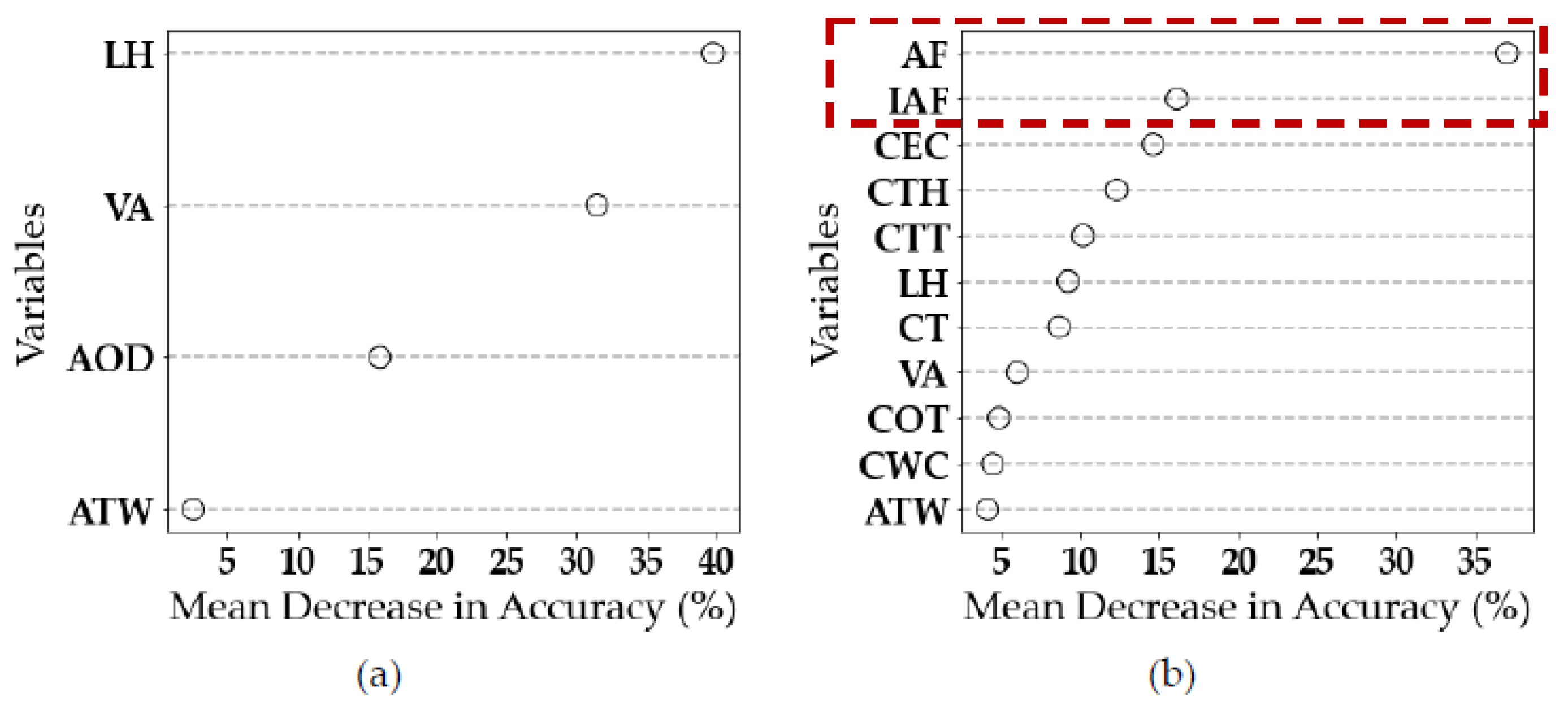
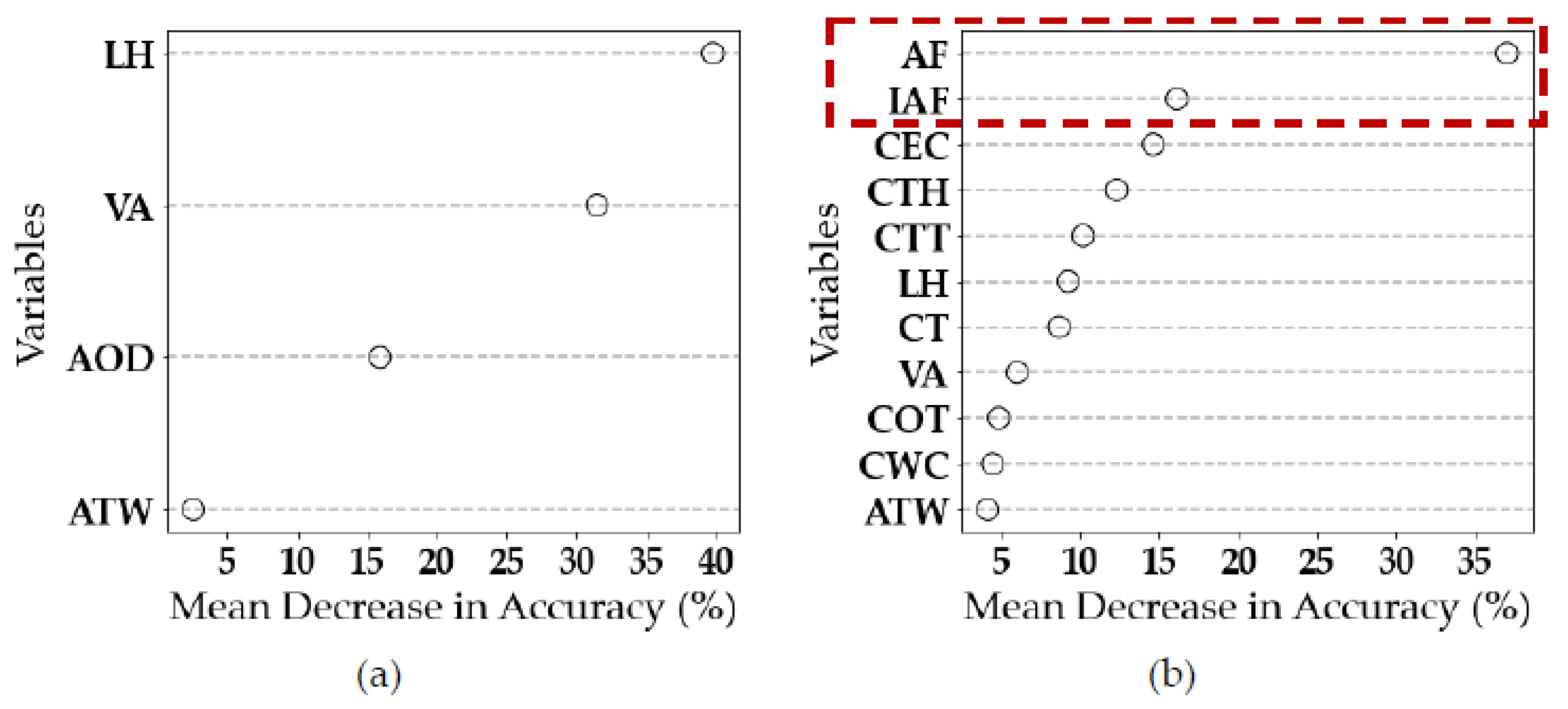
For cloud-free acquisitions, the results in
Figure 7a show that the variable most affecting the viability of GEDI acquisitions is the acquisition time (
Figure 7a, LH) with a mean decrease in accuracy (MDA) of 39.5%, followed by the viewing angle (
Figure 7a, VA) with an MDA of 31.2%. The aerosol optical depth (
Figure 7a, AOD) has a weaker effect on the viable GEDI shots in comparison to LH and VA, with an MDA of 15.8%. Lastly, the ATW has the least effect on the acquired GEDI shots, with an MDA of 2.6%. The low effect of ATW is due to the very small number of acquired shots with ATW less than 5000.
For cloudy acquisitions, results showed that the combined importance of the atmospheric factors (
Figure 7b, AF) has a much larger impact on the viability of GEDI acquisitions than the instrumental, acquisition time, and environmental factors (
Figure 7b, IAF). Indeed, for AF, the reported MDA was 37.0%, in comparison to 16.0% for IAF. For the individual contribution of the variables on the viability of GEDI acquisitions in cloudy conditions, the most important variables were all atmospheric variables (CEC, CTH, CTT, and CT) with an MDA ranging between 9.7% and 14.5%, followed by the acquisition time (LH, MDA = 9.1%) and the viewing angle (VA, MDA = 6.0%). Finally, the variables with the least effect were the cloud optical thickness (COT), ATW, and cloud water content (CWC), with an MDA for the three variables of less than 5%. Nonetheless, and while both the cloud optical thickness and cloud water content have a significant impact on the penetration of LiDAR signals, and thus the viability of GEDI acquisitions, the apparent low importance of both COT and CWC is most probably due to the low temporal and spatial resolution of both variables. Indeed, the available COT and CWC variables are daily averages of, respectively, the cloud optical thickness and cloud water content at resolutions much lower (0.1° × 0.1°) than the size of GEDI footprints (25 m).
4. Conclusions
In this study, we analyzed several instrumental and environmental factors affecting the viability of GEDI acquisitions. The study was conducted over three countries across different climatic conditions. Our results over cloud-free GEDI acquisitions showed that the most contributing factor for the nonviability of GEDI shots is the acquisition time. Indeed, shots acquired around noon were the most nonviable due to solar noise, which is highest at these times. Moreover, with cloud-free conditions, the instrumental factors equally affecting the viability of GEDI acquisitions are the viewing angle, and the laser power (replaced by amplitude of the extended Gaussian fit to the transmitted waveform, ATW) in this study). Nonetheless, the percentage of affected GEDI shots due to the two previously mentioned instrumental factors is very small. In summary, with cloud-free conditions, nonviable shots represent 25% of the total acquisitions over French Guiana and less than 10% over Tunisia and France (number of cloud-free nonviable shots divided by the number of all cloud-free shots).
Our analysis of nonviable shots with cloudy conditions showed that climatic factors have the most effect on the quality of GEDI acquisitions. In fact, with cloudy conditions, close to 65% of shots were nonviable over France and French Guiana, and 49% over Tunisia. The percentage of nonviable shots with cloudy conditions is dependent on cloud characteristics, as it increases with cloud water content and opacity.
Overall, nonviable GEDI data represent less than 50% of total GEDI acquisitions across the different instrumental, climatic, and environmental conditions, which is an improvement in comparison to its predecessor, the ICESat-1, where the acquisition viability was lower due to the occasional low transmitted energy. Even though slightly less than half of GEDI acquisitions are unexploitable, GEDI acquired, and is still acquiring, an unprecedented amount of full-waveform acquisitions globally.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}