
An Efficient Method for Estimating Wheat Heading Dates Using UAV Images

 ,
,  , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
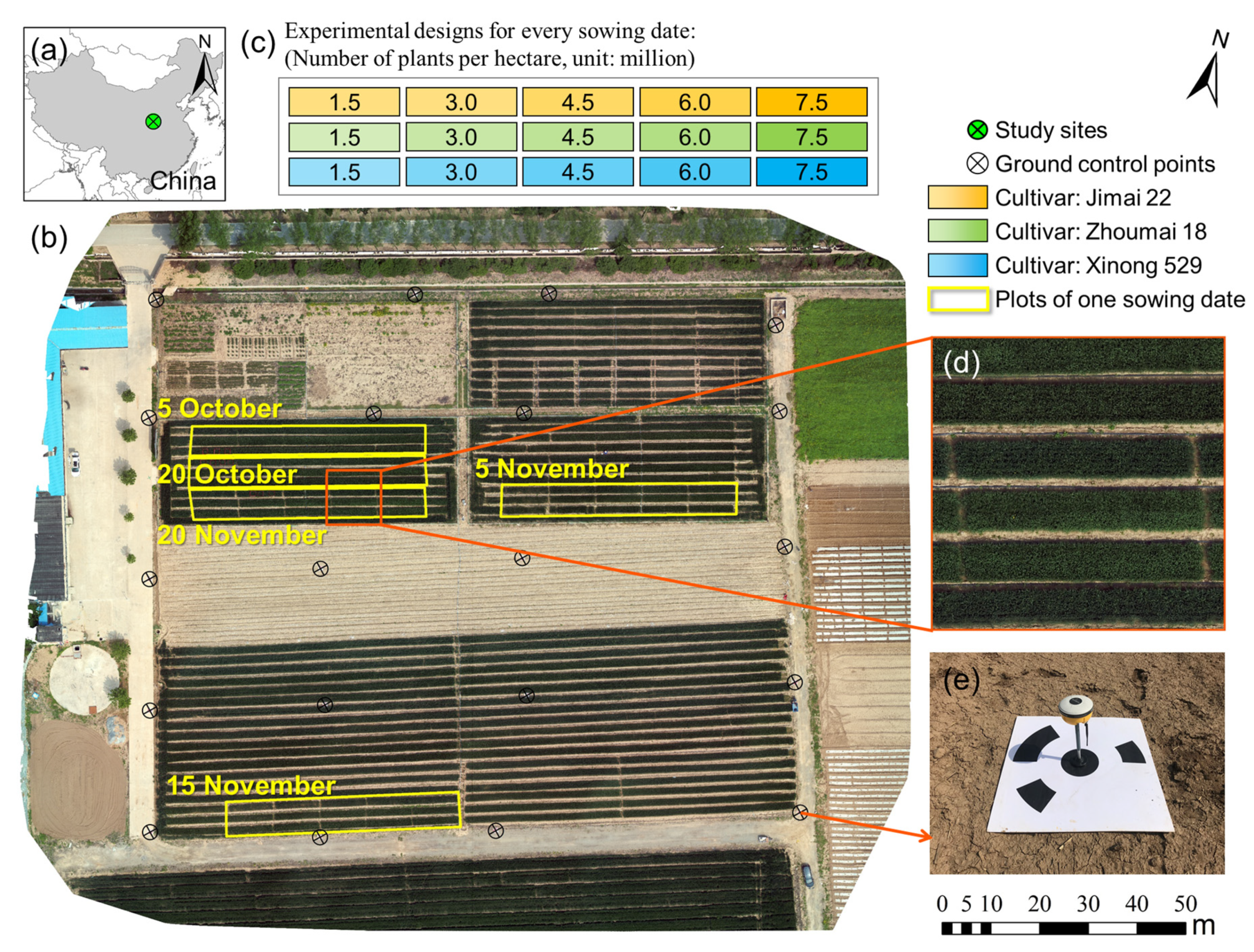
2.1. Study Area
2.2. Data Collection
2.3. Determination of Heading Date
2.4. Canopy Coverage Estimation
2.5. Plant Height Estimation
2.5.1. UAV Image Processing
2.5.2. Plant Height Estimation Using UAV Images
2.6. Growth Curve Fitting
2.6.1. Sigmoidal Curve
2.6.2. Curve Fitting
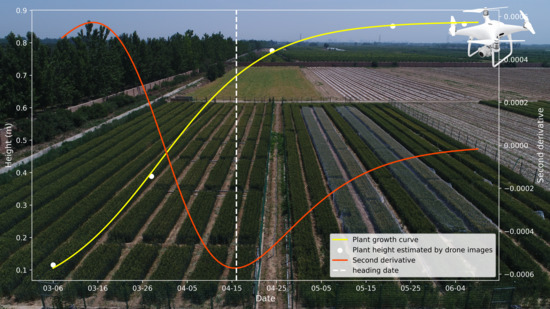
2.7. Estimation of Heading Date
2.8. Accuracy Evaluation of the Proposed Model
3. Result
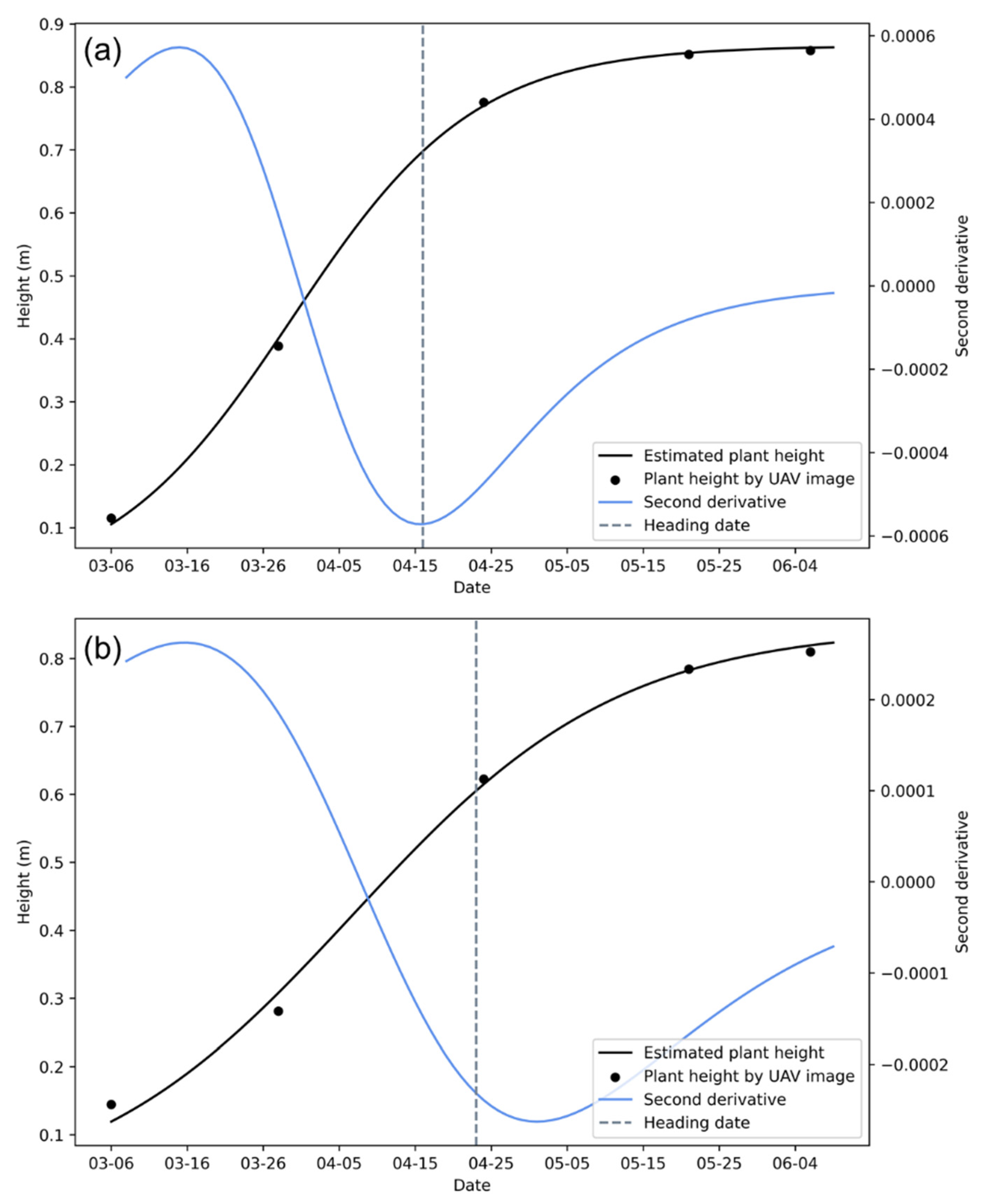
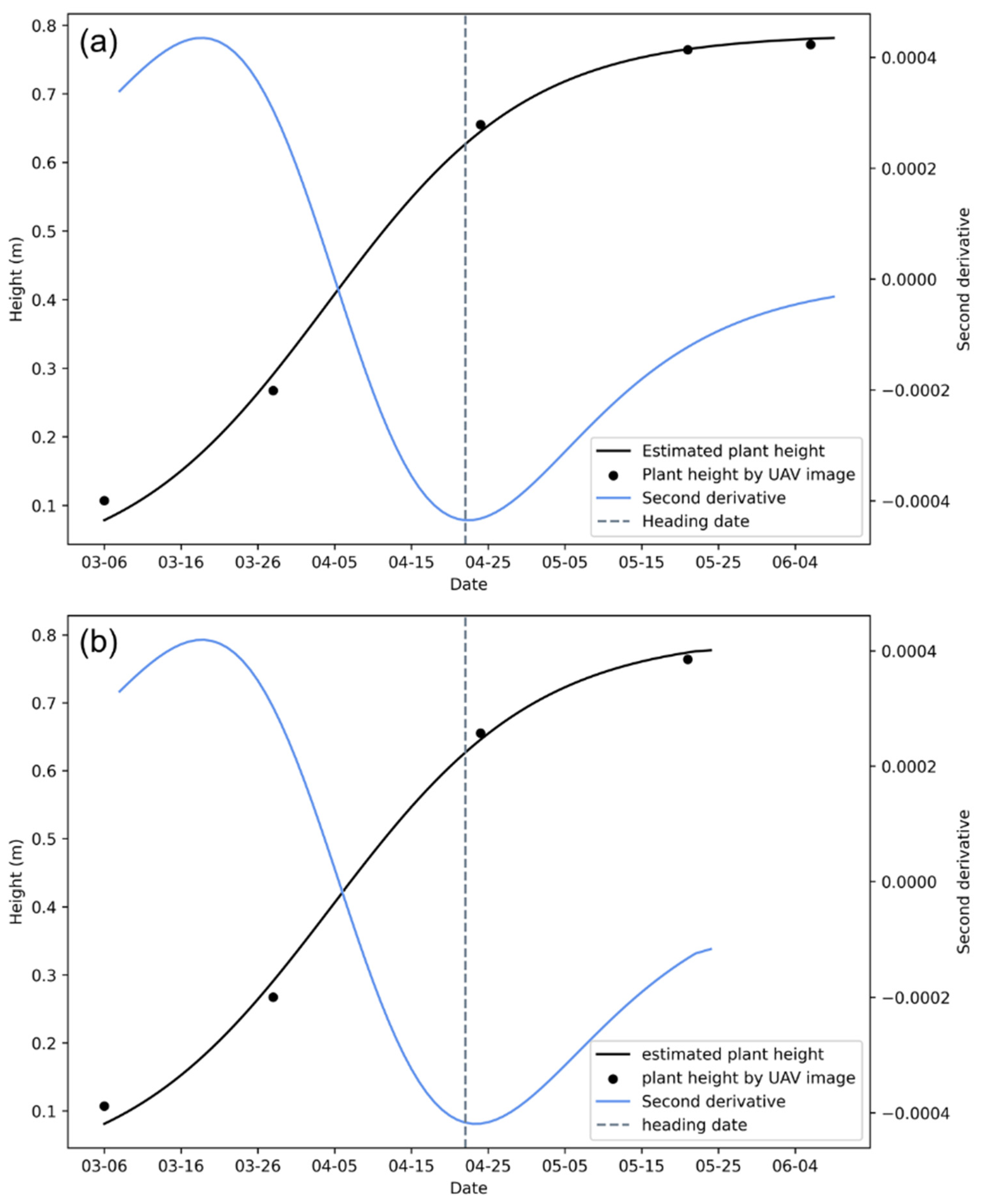
3.1. Plant Height Growth Curve
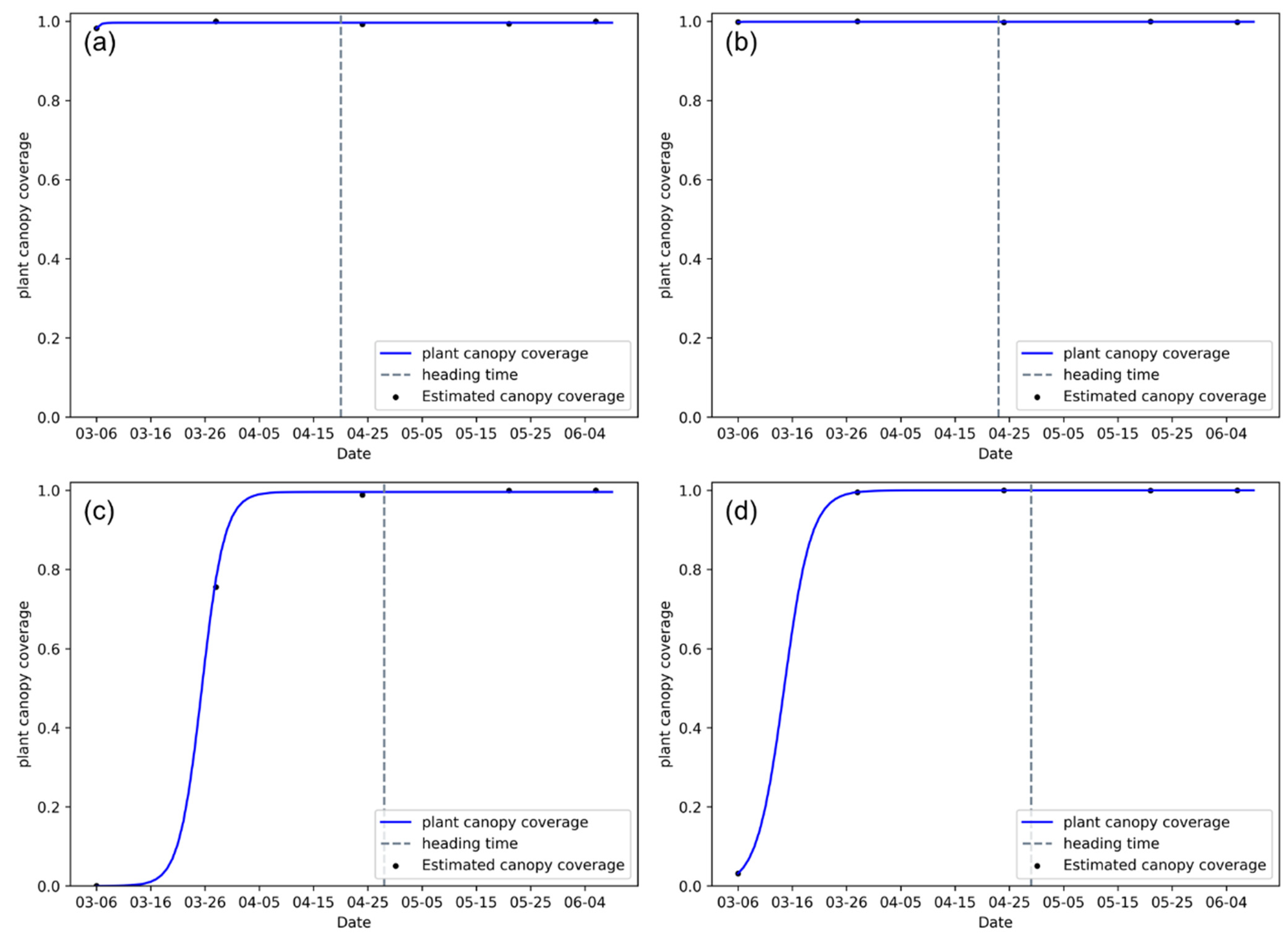
3.2. Growth Curves of Canopy Coverage
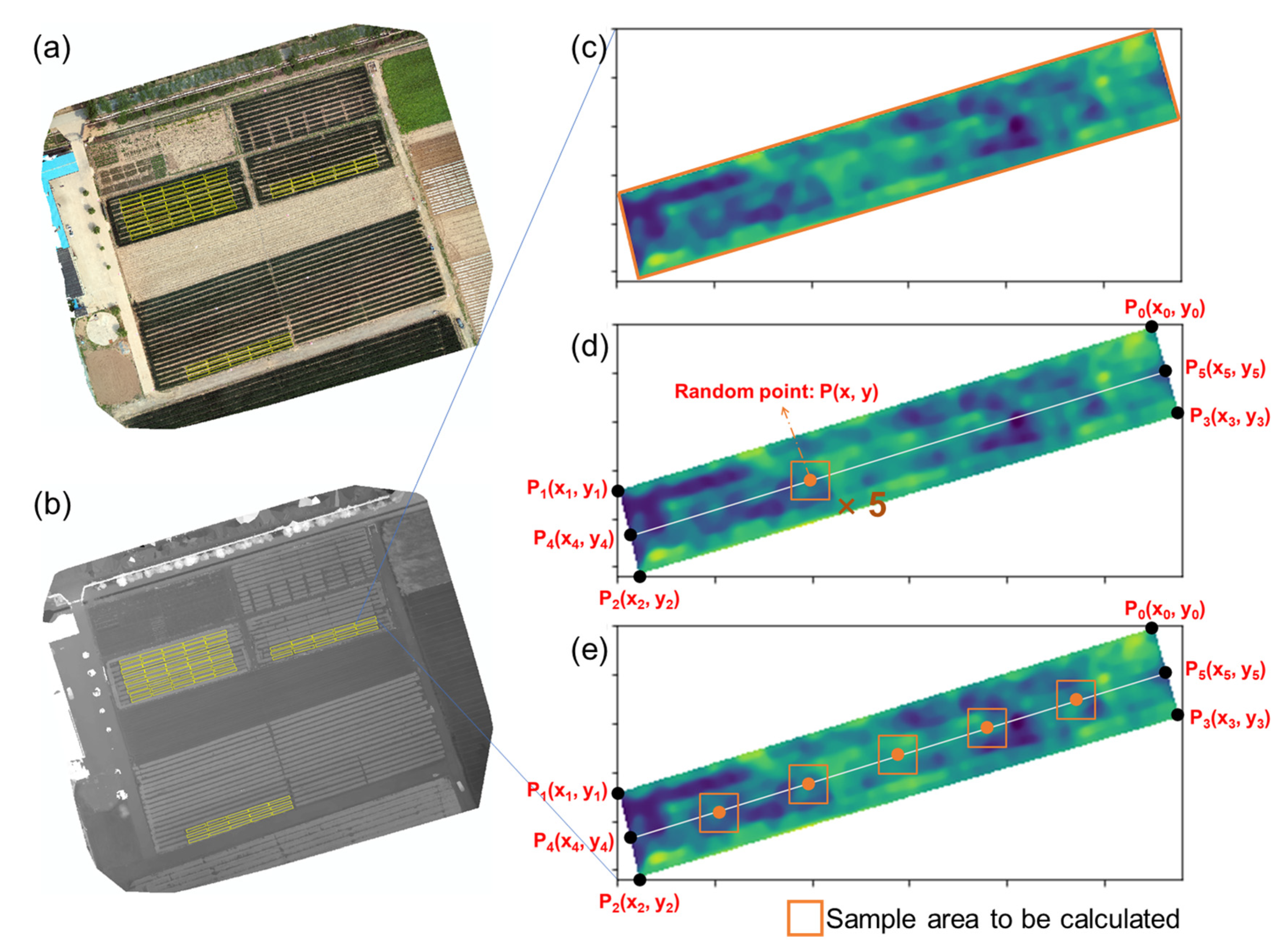
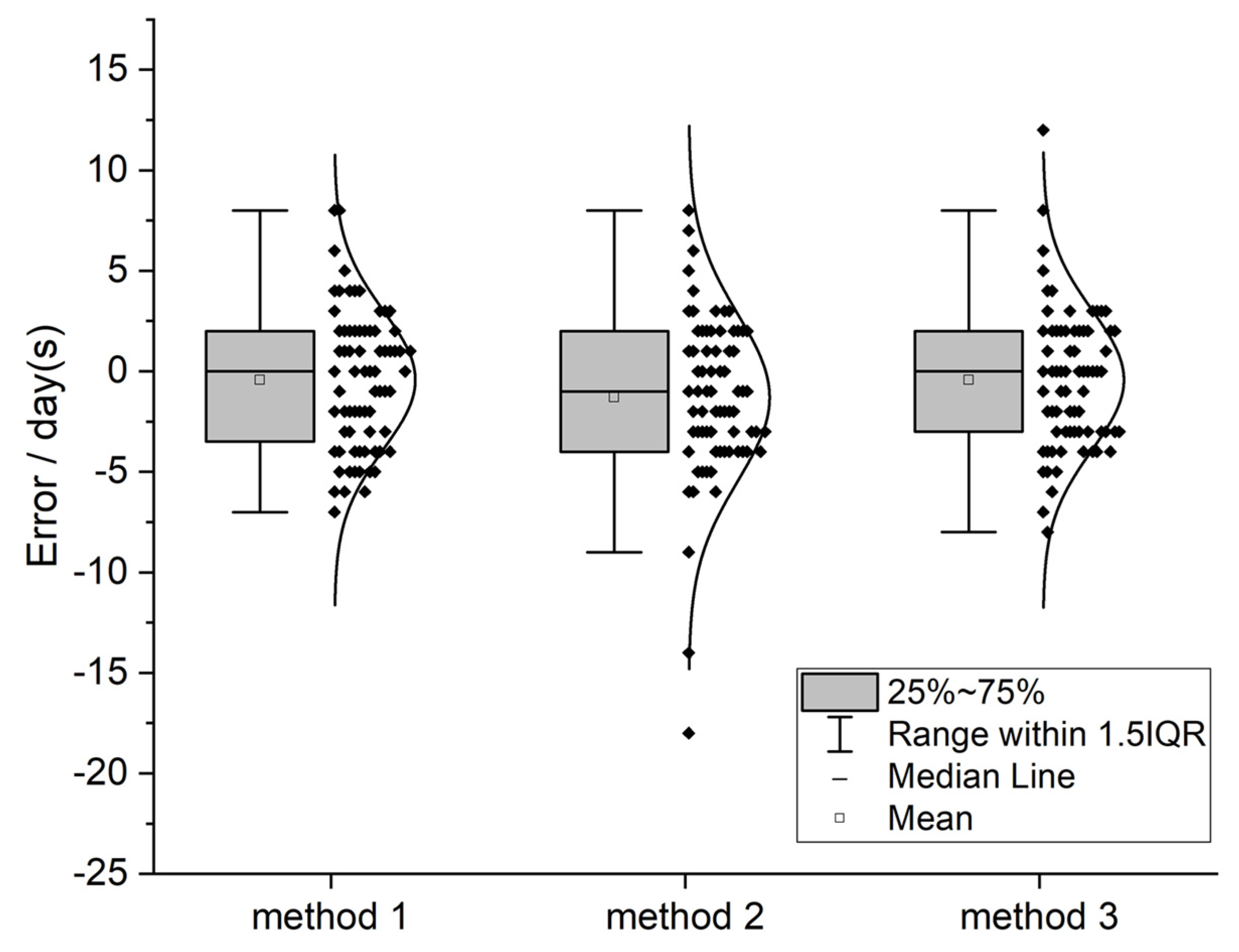
3.3. Sampling Methods of Plant Height Estimation
3.4. Evaluation of the Accuracy of the Estimated Heading Dates
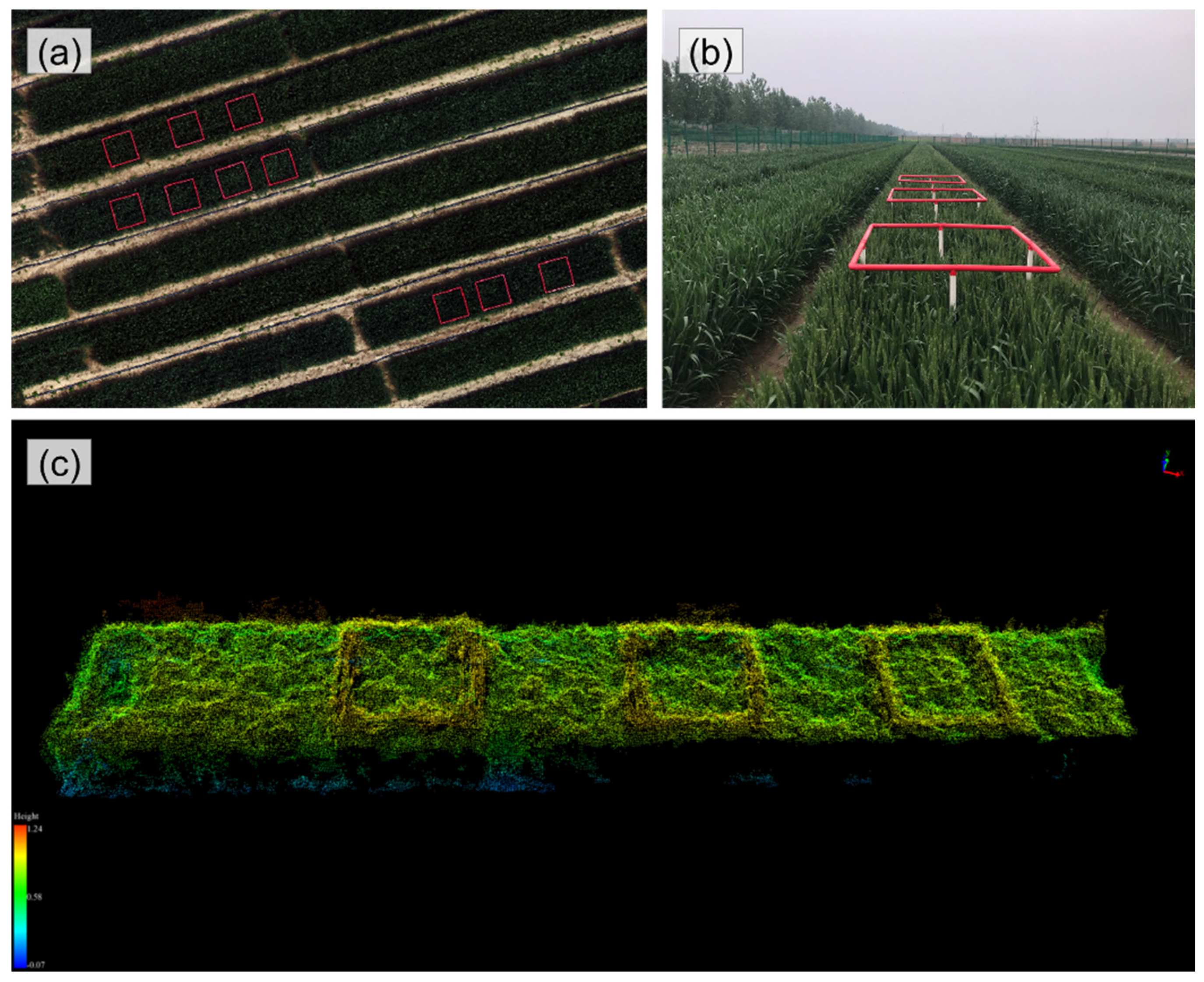
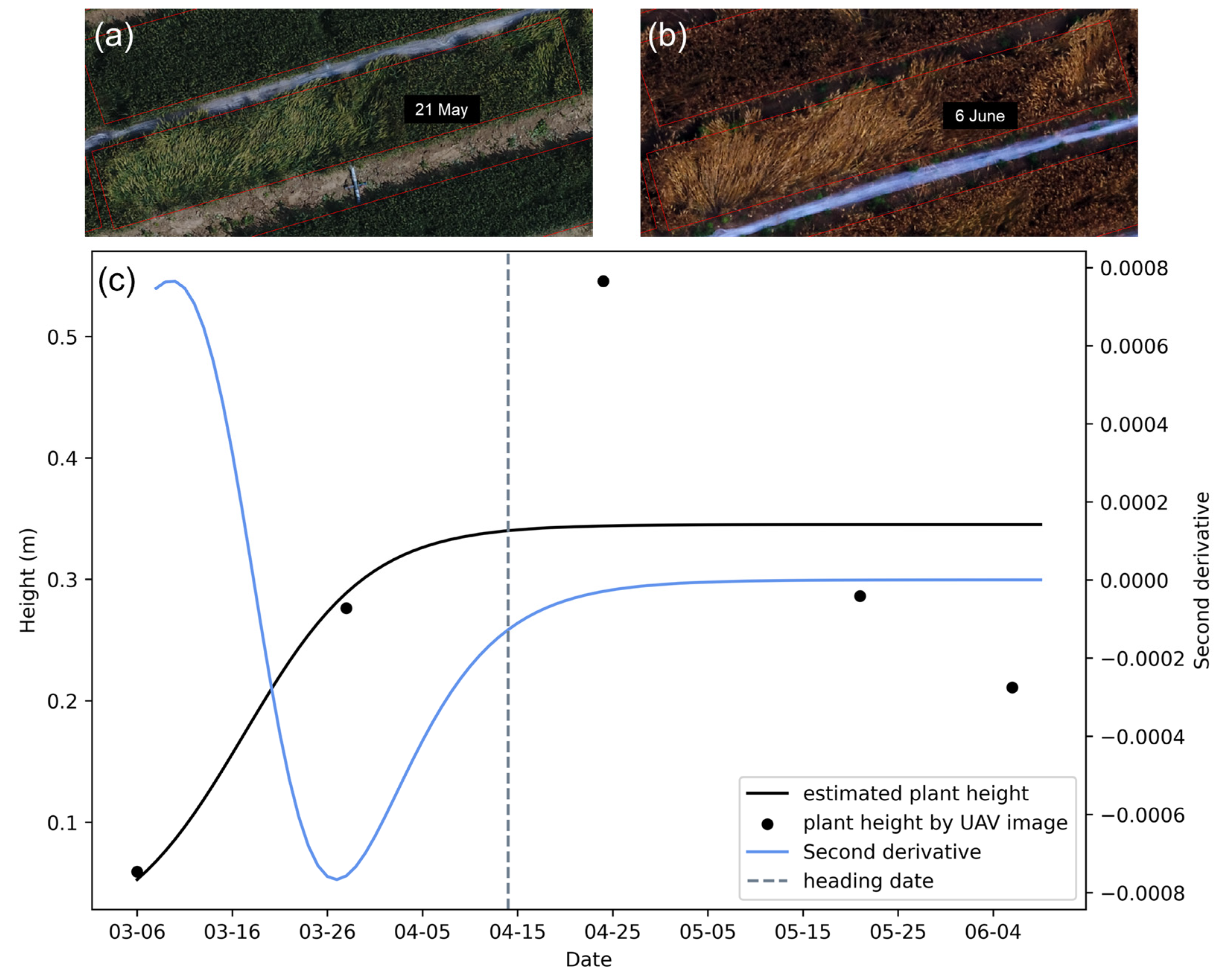
3.5. Interference in the Field
3.6. Error Analysis
- (1)
- Decreased or negative plant height in the early and middle growth periods
- (2)
- A sharp decrease in wheat plant height at the late growth stage
3.7. Estimation of Heading Dates before the End of the Growth Period
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schmidhuber, J.; Tubiello, F.N. Global food security under climate change. Proc. Natl. Acad. Sci. USA 2007, 104, 19703–19708. [Google Scholar] [CrossRef] [PubMed]
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global food demand and the sustainable intensification of agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef]
- Myers, S.S.; Smith, M.R.; Guth, S.; Golden, C.D.; Vaitla, B.; Mueller, N.D.; Dangour, A.D.; Huybers, P. Climate Change and Global Food Systems: Potential Impacts on Food Security and Undernutrition. Annu. Rev. Public. Health 2017, 38, 259–277. [Google Scholar] [CrossRef] [PubMed]
- IFPRI. Actions and Accountability to Advance Nutrition & Sustainable Development—Global Nutrition Report 2015; International Food Policy Research Institute: Washington, DC, USA, 2015; p. 3. [Google Scholar]
- Ihsan, M.Z.; El-Nakhlawy, F.S.; Ismail, S.M.; Fahad, S.; Daur, I. Wheat Phenological Development and Growth Studies As Affected by Drought and Late Season High Temperature Stress under Arid Environment. Front. Plant Sci. 2016, 7, 795. [Google Scholar] [CrossRef]
- Yu, Z.; Cao, Z.; Wu, X.; Bai, X.; Qin, Y.; Zhuo, W.; Xiao, Y.; Zhang, X.; Xue, H. Automatic image-based detection technology for two critical growth stages of maize: Emergence and three-leaf stage. Agric. For. Meteorol. 2013, 174–175, 65–84. [Google Scholar] [CrossRef]
- Kawakita, S.; Takahashi, H.; Moriya, K. Prediction and parameter uncertainty for winter wheat phenology models depend on model and parameterization method differences. Agric. For. Meteorol. 2020, 290. [Google Scholar] [CrossRef]
- Velumani, K.; Madec, S.; de Solan, B.; Lopez-Lozano, R.; Gillet, J.; Labrosse, J.; Jezequel, S.; Comar, A.; Baret, F. An automatic method based on daily in situ images and deep learning to date wheat heading stage. Field Crop. Res. 2020, 252. [Google Scholar] [CrossRef]
- Zhu, Y.; Cao, Z.; Lu, H.; Li, Y.; Xiao, Y. In-field automatic observation of wheat heading stage using computer vision. Biosyst. Eng. 2016, 143, 28–41. [Google Scholar] [CrossRef]
- Bai, X.; Cao, Z.; Zhao, L.; Zhang, J.; Lv, C.; Li, C.; Xie, J. Rice heading stage automatic observation by multi-classifier cascade based rice spike detection method. Agric. For. Meteorol. 2018, 259, 260–270. [Google Scholar] [CrossRef]
- Desai, S.V.; Balasubramanian, V.N.; Fukatsu, T.; Ninomiya, S.; Guo, W. Automatic estimation of heading date of paddy rice using deep learning. Plant Methods 2019, 15, s13007–s13019. [Google Scholar] [CrossRef]
- Wang, X.; Xuan, H.; Evers, B.; Shrestha, S.; Pless, R.; Poland, J. High-throughput phenotyping with deep learning gives insight into the genetic architecture of flowering time in wheat. Gigascience 2019, 8. [Google Scholar] [CrossRef]
- Nishimura, T.; Sasaki, K.; Yamaguchi, T.; Takahashi, H.; Yamagishi, J.; Kato, Y. Detection and characterization of quantitative trait loci for coleoptile elongation under anaerobic conditions in rice. Plant Prod. Sci. 2020, 23, 374–383. [Google Scholar] [CrossRef]
- Holman, F.; Riche, A.; Michalski, A.; Castle, M.; Wooster, M.; Hawkesford, M. High Throughput Field Phenotyping of Wheat Plant Height and Growth Rate in Field Plot Trials Using UAV Based Remote Sensing. Remote Sens. 2016, 8, 1031. [Google Scholar] [CrossRef]
- Guo, W.; Zheng, B.; Duan, T.; Fukatsu, T.; Chapman, S.; Ninomiya, S. EasyPCC: Benchmark Datasets and Tools for High-Throughput Measurement of the Plant Canopy Coverage Ratio under Field Conditions. Sensors 2017, 17, 798. [Google Scholar] [CrossRef]
- Hu, P.; Guo, W.; Chapman, S.C.; Guo, Y.; Zheng, B. Pixel size of aerial imagery constrains the applications of unmanned aerial vehicle in crop breeding. ISPRS J. Photogramm. Remote Sens. 2019, 154, 1–9. [Google Scholar] [CrossRef]
- Smigaj, M.; Gaulton, R.; Suárez, J.C.; Barr, S.L. Canopy temperature from an Unmanned Aerial Vehicle as an indicator of tree stress associated with red band needle blight severity. For. Ecol. Manag. 2019, 433, 699–708. [Google Scholar] [CrossRef]
- Crusiol, L.G.T.; Nanni, M.R.; Furlanetto, R.H.; Sibaldelli, R.N.R.; Cezar, E.; Mertz-Henning, L.M.; Nepomuceno, A.L.; Neumaier, N.; Farias, J.R.B. UAV-based thermal imaging in the assessment of water status of soybean plants. Int. J. Remote Sens. 2020, 41, 3243–3265. [Google Scholar] [CrossRef]
- Turner, D.J.; Malenovsky, Z.; Lucieer, A.; Turnbull, J.D.; Robinson, S.A. Optimizing Spectral and Spatial Resolutions of Unmanned Aerial System Imaging Sensors for Monitoring Antarctic Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3813–3825. [Google Scholar] [CrossRef]
- Jay, S.; Baret, F.; Dutartre, D.; Malatesta, G.; Héno, S.; Comar, A.; Weiss, M.; Maupas, F. Exploiting the centimeter resolution of UAV multispectral imagery to improve remote-sensing estimates of canopy structure and biochemistry in sugar beet crops. Remote Sens. Environ. 2019, 231. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Siebring, J.; Valente, J.; Domingues Franceschini, M.H.; Kamp, J.; Kooistra, L. Object-Based Image Analysis Applied to Low Altitude Aerial Imagery for Potato Plant Trait Retrieval and Pathogen Detection. Sensors 2019, 19, 5477. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Robertson, J.S. DeepSeedling: Deep convolutional network and Kalman filter for plant seedling detection and counting in the field. Plant Methods 2019, 15, 141. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; De Swaef, T.; Quataert, P.; Aper, J.; Saleem, A.; Saeys, W.; Somers, B.; Roldán-Ruiz, I.; Lootens, P. Closing the Phenotyping Gap: High Resolution UAV Time Series for Soybean Growth Analysis Provides Objective Data from Field Trials. Remote Sens. 2020, 12, 1644. [Google Scholar] [CrossRef]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- The People’s Government of Salt Lake District. Y.C. Yuncheng Climate and Environment. Available online: http://www.yanhu.gov.cn/zjyh/yhrw/qhhj/index.shtml (accessed on 17 November 2020).
- Zadoks, J.C.; Chang, T.T.; Konzak, C.F. A decimal code for the growth stages of cereals. Weed Res. 1974, 14, 415–421. [Google Scholar] [CrossRef]
- Wang, H.; Duan, Y.; Shi, Y.; Kato, Y.; Ninomiya, S.; Guo, W. EasyIDP: A Python Package for Intermediate Data Processing in UAV-Based Plant Phenotyping. Remote Sens. 2021, 13, 2622. [Google Scholar] [CrossRef]
- Verhulst, P.F. Recherches Mathématiques sur la loi D’accroissement de la Population, par P.F. Verhulst; M. Hayez: Brussels, Belgium, 1845. [Google Scholar]
- Harahagazwe, D.; Condori, B.; Barreda, C.; Bararyenya, A.; Byarugaba, A.A.; Kude, D.A.; Lung’aho, C.; Martinho, C.; Mbiri, D.; Nasona, B.; et al. How big is the potato (Solanum tuberosum L.) yield gap in Sub-Saharan Africa and why? A participatory approach. Open Agric. 2018, 3, 180–189. [Google Scholar] [CrossRef]
- Luo, S.; He, Y.; Li, Q.; Jiao, W.; Zhu, Y.; Zhao, X. Nondestructive estimation of potato yield using relative variables derived from multi-period LAI and hyperspectral data based on weighted growth stage. Plant Methods 2020, 16, 150. [Google Scholar] [CrossRef]
- Shi, P.-J.; Chen, L.; Hui, C.; Grissino-Mayer, H.D. Capture the time when plants reach their maximum body size by using the beta sigmoid growth equation. Ecol. Model. 2016, 320, 177–181. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental algorithms for scientific computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Grogan, S.M.; Anderson, J.; Baenziger, P.S.; Frels, K.; Guttieri, M.J.; Haley, S.D.; Kim, K.-S.; Liu, S.; McMaster, G.S.; Newell, M.; et al. Phenotypic Plasticity of Winter Wheat Heading Date and Grain Yield across the US Great Plains. Crop Sci. 2016, 56, 2223–2236. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, Y.; Liu, B.; Hovis, C.; Duan, Y.; Shi, Z. Finer Classification of Crops by Fusing UAV Images and Sentinel-2A Data. Remote Sens. 2019, 11, 3012. [Google Scholar] [CrossRef]
- Jukić, D.; Kralik, G.; Scitovski, R. Least-squares fitting Gompertz curve. J. Comput. Appl. Math. 2004, 169, 359–375. [Google Scholar] [CrossRef][Green Version]
- Björck, A. Numerical Methods for Least Squares Problems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996; p. 424. [Google Scholar] [CrossRef]
- Demidenko, E. On the existence of the least squares estimate in nonlinear growth curve models of exponential type. Commun. Stat. Theory Methods 1996, 25, 159–182. [Google Scholar] [CrossRef]
- Demidenko, E. Is this the least squares estimate? Biometrika 2000, 87, 437–452. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sowing Date | Densities | 1.5 Million Plants/ha | 3 Million Plants/ha | 4.5 Million Plants/ha | 6 Million Plants/ha | 7.5 Million Plants/ha | |
|---|---|---|---|---|---|---|---|
| Varieties | |||||||
| 5 October | Jimai 22 | 20 April | 21 April | 22 April | 23 April | 23 April | |
| Zhoumai 18 | 20 April | 22 April | 22 April | 23 April | 23 April | ||
| Xinong 529 | 12 April | 12 April | 14 April | 16 April | 17 April | ||
| 20 October | Jimai 22 | 23 April | 23 April | 24 April | 24 April | 26 April | |
| Zhoumai 18 | 21 April | 21 April | 23 April | 23 April | 23 April | ||
| Xinong 529 | 16 April | 17 April | 17 April | 19 April | 19 April | ||
| 5 November | Jimai 22 | 23 April | 23 April | 23 April | 23 April | 25 April | |
| Zhoumai 18 | 22 April | 22 April | 23 April | 23 April | 23 April | ||
| Xinong 529 | 21 April | 21 April | 21 April | 22 April | 22 April | ||
| 15 November | Jimai 22 | 24 April | 24 April | 24 April | 24 April | 24 April | |
| Zhoumai 18 | 23 April | 23 April | 23 April | 23 April | 23 April | ||
| Xinong 529 | 23 April | 23 April | 23 April | 23 April | 23 April | ||
| 25 November | Jimai 22 | 29 April | 29 April | 30 April | 30 April | 1 May | |
| Zhoumai 18 | 2 May | 28 April | 28 April | 29 April | 29 April | ||
| Xinong 529 | 27 April | 27 April | 28 April | 28 April | 29 April | ||
| Number of GCPs | Flying Height (m) | Speed (m/s) | Resolution (cm) | |
|---|---|---|---|---|
| 6 March | 15 | 30 | 5 | 0.79 |
| 28 March | 18 | 30 | 5 | 0.82 |
| 24 April | 19 | 30 | 5 | 0.83 |
| 21 May | 22 | 30 | 5 | 0.83 |
| 6 June | 20 | 30 | 5 | 0.82 |
| Functions | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| Number of estimated plots | 71 | 6 | 72 | 0 | 71 | 0 | 0 | 70 | 70 |
| MAE (days) | 2.90 | 4.50 | 2.92 | \ | 6.48 | \ | \ | 2.86 | 2.86 |
| RMSE (days) | 3.51 | 4.60 | 3.52 | \ | 7.17 | \ | \ | 3.46 | 3.46 |
| Minimum | Maximum | MAE | RMSE | |
|---|---|---|---|---|
| Sampling method 1 | 0 | 8 | 2.92 | 3.52 |
| Sampling method 2 | 0 | 18 | 3.22 | 4.32 |
| Sampling method 3 | 0 | 12 | 2.81 | 3.49 |
| Plot | Reference Heading Date | Estimated Heading Date (Sampling Method 1) | Estimated Heading Date (Sampling Method 2) | Estimated Heading Date (Sampling Method 3) | Estimated Heading Date (after Removing Affected Area for Sampling Method 1) |
|---|---|---|---|---|---|
| 1 | 12 April | 11 April | 11 April | 9 April | 11 April |
| (−1) | (−1) | (−3) | (−1) | ||
| 2 | 23 April | 13 April | 14 April | 11 April | 17 April |
| (−10) | (−9) | (−12) | (−5) | ||
| 3 | 29 April | 7 April | 6 April | 16 April | 27 April |
| (−22) | (−23) | (−13) | (−2) |
| MAE (days) | RMSE (days) | |
|---|---|---|
| 5 time-series data | 2.40 | 3.52 |
| 4 time-series data | 3.20 | 3.78 |
| MAE (days) | RMSE (days) | Data | |
|---|---|---|---|
| Velumani et al. | 3.11 | 4.24 | 4 years of data to calibrate the model |
| Velumani et al. | 1.34–1.60 | 1.91–2.11 | One image per day |
| Desai et al. | 0.8 | Take pictures every 5 min | |
| Zhu et al. | 1.14 | One image per hour | |
| Bai et al. | <2 | Three images per day | |
| proposed methods | 2.81 | 3.49 | 5 time-series UAV data within the entire wheat growth cycle (>200 days) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Guo, W.; Wang, J.; Wang, H.; Duan, Y.; Wang, C.; Wu, W.; Shi, Y. An Efficient Method for Estimating Wheat Heading Dates Using UAV Images. Remote Sens. 2021, 13, 3067. https://doi.org/10.3390/rs13163067
Zhao L, Guo W, Wang J, Wang H, Duan Y, Wang C, Wu W, Shi Y. An Efficient Method for Estimating Wheat Heading Dates Using UAV Images. Remote Sensing. 2021; 13(16):3067. https://doi.org/10.3390/rs13163067
Chicago/Turabian StyleZhao, Licheng, Wei Guo, Jian Wang, Haozhou Wang, Yulin Duan, Cong Wang, Wenbin Wu, and Yun Shi. 2021. "An Efficient Method for Estimating Wheat Heading Dates Using UAV Images" Remote Sensing 13, no. 16: 3067. https://doi.org/10.3390/rs13163067
APA StyleZhao, L., Guo, W., Wang, J., Wang, H., Duan, Y., Wang, C., Wu, W., & Shi, Y. (2021). An Efficient Method for Estimating Wheat Heading Dates Using UAV Images. Remote Sensing, 13(16), 3067. https://doi.org/10.3390/rs13163067