
Sinkhole Scanner: A New Method to Detect Sinkhole-Related Spatio-Temporal Patterns in InSAR Deformation Time Series



Abstract
:1. Introduction
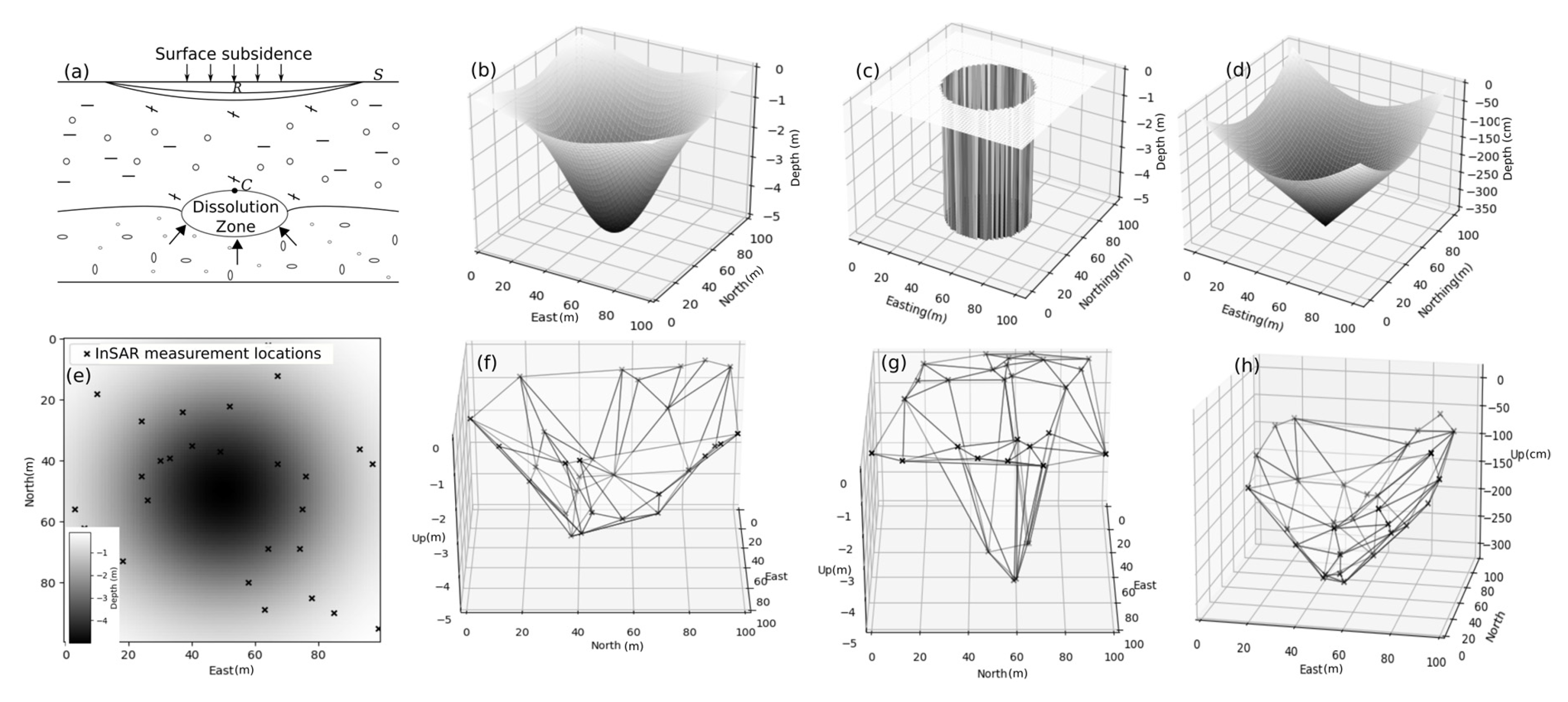
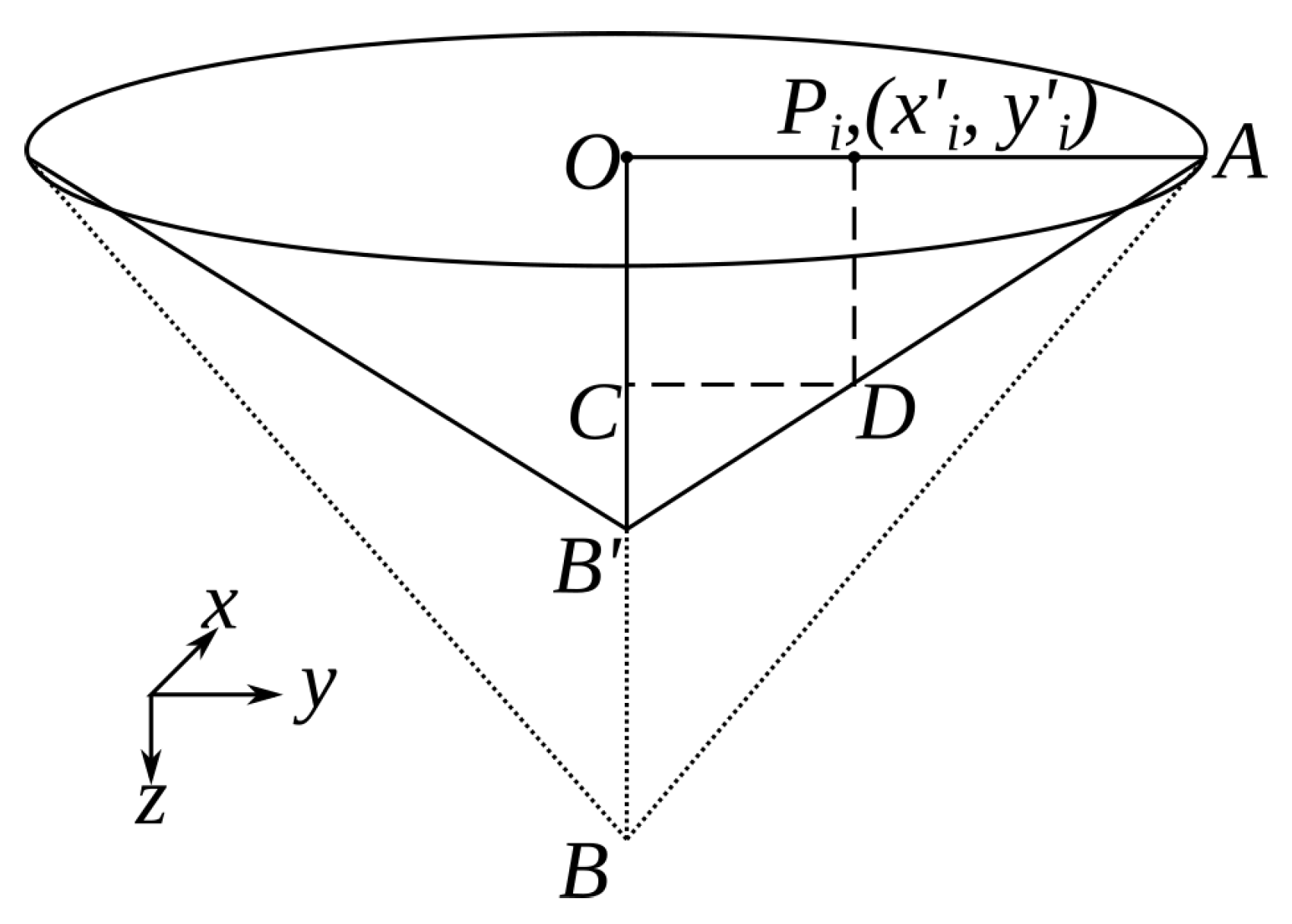
2. Background on Sinkhole Types and Shapes
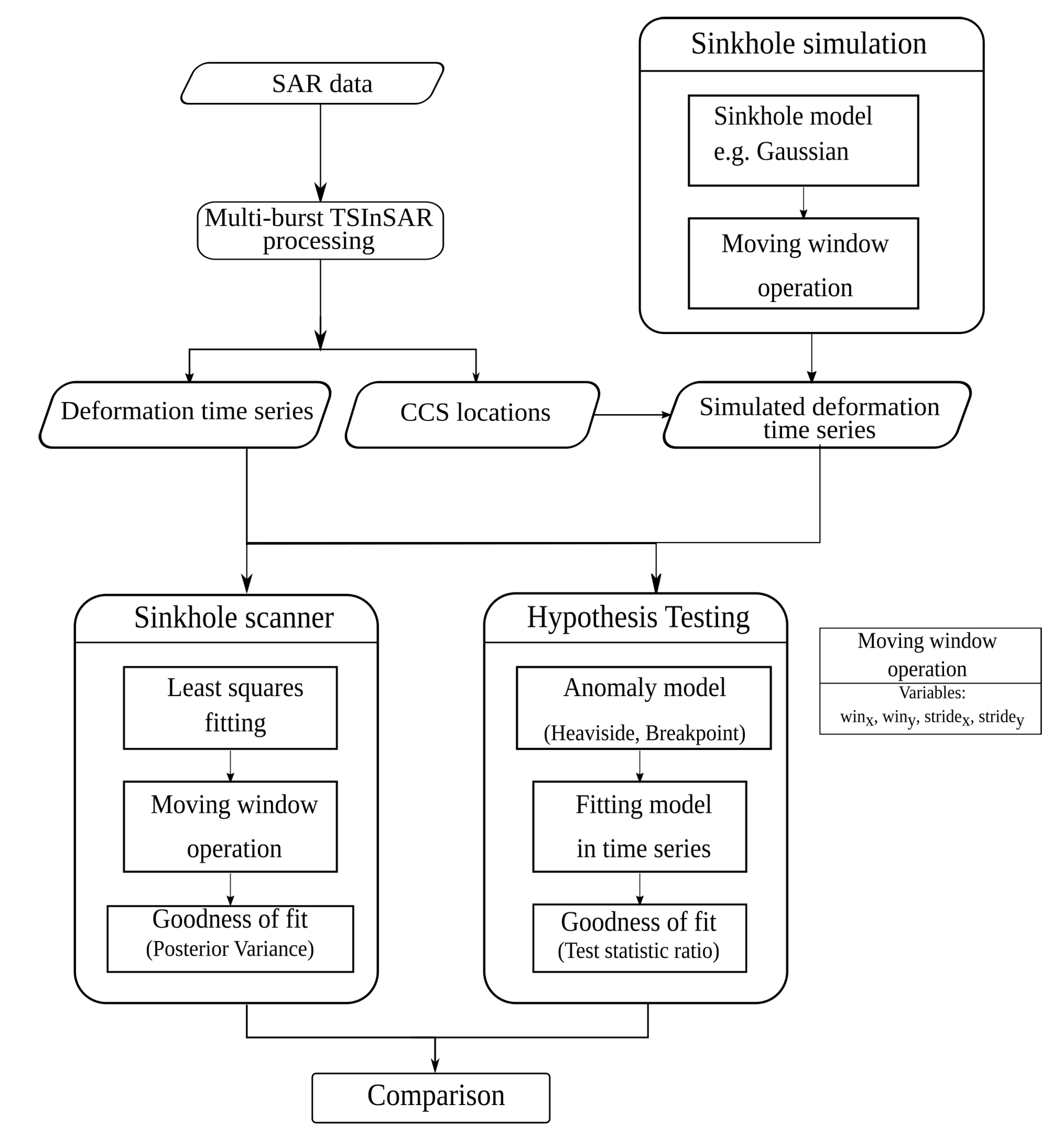
3. Methods
3.1. Multi-Burst TSInSAR Processing
3.2. Sinkhole Simulation
3.3. Sinkhole Scanner
3.4. Moving Window Operation
3.5. Hypothesis Testing Method
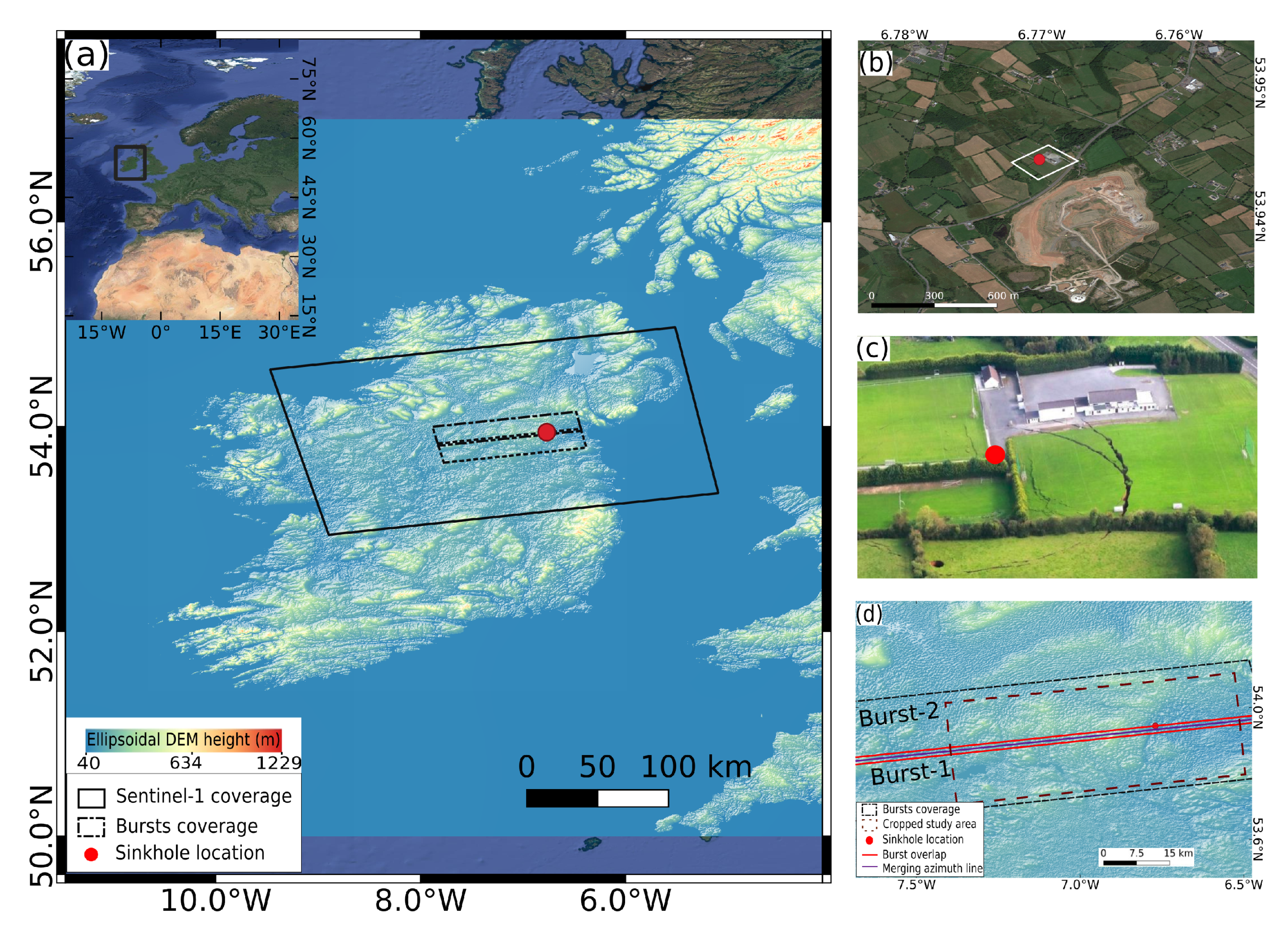
4. SAR Data and Test Site Description
5. Results
5.1. TSInSAR Results
5.2. Sinkhole Scanner Results
5.3. Hypothesis Testing Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Al-Halbouni, D.; P Holohan, E.; Taheri, A.; Schöpfer, M.P.; Emam, S.; Dahm, T. Geomechanical modelling of sinkhole development using distinct elements: Model verification for a single void space and application to the Dead Sea area. Solid Earth 2018, 9, 1341–1373. [Google Scholar] [CrossRef] [Green Version]
- Theron, A.; Engelbrecht, J. The Role of Earth Observation, with a Focus on SAR Interferometry, for Sinkhole Hazard Assessment. Remote Sens. 2018, 10, 1506. [Google Scholar] [CrossRef] [Green Version]
- Jain, S. Fundamentals of Physical Geology; Springer: New Delhi, India, 2014; pp. 227–238. [Google Scholar] [CrossRef]
- Williams, P. Encyclopedia of Caves and Karst Science; Chapter Dolines; Fitzroy Dearborn: New York, NY, USA, 2004; pp. 304–310. [Google Scholar] [CrossRef]
- Desir, G.; Merino, J.; Carbonel, D.; Benito Calvo, A.; Guerrero, J.; Fabregat, I. Rapid subsidence in damaging sinkholes: Measurement by high-precision leveling and the role of salt dissolution. Geomorphology 2018, 303, 393–409. [Google Scholar] [CrossRef]
- Maheshwari, M.; Yang, Y.; Upadrashta, D.; Huang, E.S.; Goh, K.H. Fiber Bragg Grating (FBG) based magnetic extensometer for ground settlement monitoring. Sens. Actuators A Phys. 2019, 296, 132–144. [Google Scholar] [CrossRef]
- Wust-Bloch, G.H.; Joswig, M. Pre-collapse identification of sinkholes in unconsolidated media at Dead Sea area by ‘nanoseismic monitoring’ (graphical jackknife location of weak sources by few, low-SNR records). Geophys. J. Int. 2006, 167, 1220–1232. [Google Scholar] [CrossRef] [Green Version]
- Suh, J.; Choi, Y. Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ. Earth Sci. 2017, 76. [Google Scholar] [CrossRef]
- Lee, E.J.; Shin, S.Y.; Ko, B.C.; Chang, C. Early sinkhole detection using a drone-based thermal camera and image processing. Infrared Phys. Technol. 2016, 78, 223–232. [Google Scholar] [CrossRef]
- Love, A. In Memory of Carl A. Wiley. IEEE Antennas Propag. Soc. Newsl. 1985, 27, 17–18. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.Ö.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Yaseen, M.; Hamm, N.; Woldai, T.; Tolpekin, V.; Stein, A. Local interpolation of coseismic displacements measured by InSAR. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 1–17. [Google Scholar] [CrossRef]
- Amelung, F.; Galloway, D.L.; Bell, J.W.; Zebker, H.A.; Laczniak, R.J. Sensing the ups and downs of Las Vegas: InSAR reveals structural control of land subsidence and aquifer-system deformation. Geology 1999, 27, 483–486. [Google Scholar] [CrossRef]
- Markušić, S.; Stanko, D.; Penava, D.; Ivančić, I.; Bjelotomić Oršulić, O.; Korbar, T.; Sarhosis, V. Destructive M6.2 Petrinja Earthquake (Croatia) in 2020—Preliminary Multidisciplinary Research. Remote Sens. 2021, 13, 1095. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatters in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E. A small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Chang, L.; Hanssen, R.F. Detection of cavity migration and sinkhole risk using radar interferometric time series. Remote Sens. Environ. 2014, 147, 56–64. [Google Scholar] [CrossRef]
- Nof, R.N.; Abelson, M.; Raz, E.; Magen, Y.; Atzori, S.; Salvi, S.; Baer, G. SAR interferometry for sinkhole early warning and susceptibility assessment along the Dead Sea, Israel. Remote Sens. 2019, 11, 89. [Google Scholar] [CrossRef] [Green Version]
- Vaccari, A.; Stuecheli, M.; Bruckno, B.; Hoppe, E.; Acton, S.T. Detection of geophysical features in InSAR point cloud data sets using spatiotemporal models. Int. J. Remote Sens. 2013, 34, 8215–8234. [Google Scholar] [CrossRef]
- Baer, G.; Magen, Y.; Nof, R.N.; Raz, E.; Lyakhovsky, V.; Shalev, E. InSAR Measurements and Viscoelastic Modeling of Sinkhole Precursory Subsidence: Implications for Sinkhole Formation, Early Warning, and Sediment Properties. J. Geophys. Res. Earth Surf. 2018, 123, 678–693. [Google Scholar] [CrossRef]
- Kim, J.W.; Lu, Z.; Degrandpre, K.; Kim, J.W.; Lu, Z.; Degrandpre, K. Ongoing Deformation of Sinkholes in Wink, Texas, Observed by Time-Series Sentinel-1A SAR Interferometry (Preliminary Results). Remote Sens. 2016, 8, 313. [Google Scholar] [CrossRef] [Green Version]
- Malinowska, A.A.; Witkowski, W.T.; Hejmanowski, R.; Chang, L.; van Leijen, F.J.; Hanssen, R.F. Sinkhole occurrence monitoring over shallow abandoned coal mines with satellite-based persistent scatterer interferometry. Eng. Geol. 2019, 262, 105336. [Google Scholar] [CrossRef]
- Martinotti, M.E.; Pisano, L.; Marchesini, I.; Rossi, M.; Peruccacci, S.; Brunetti, M.T.; Melillo, M.; Amoruso, G.; Loiacono, P.; Vennari, C.; et al. Landslides, floods and sinkholes in a karst environment: The 1–6 September 2014 Gargano event, southern Italy. Nat. Hazards Earth Syst. Sci. 2017, 17, 467–480. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Hanssen, R.F. A Probabilistic Approach for InSAR Time-Series Postprocessing. IEEE Trans. Geosci. Remote Sens. 2016, 54, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Jones, C.E.; Blom, R.G. Bayou Corne, Louisiana, sinkhole: Precursory deformation measured by radar interferometry. Geology 2014, 42, 111–114. [Google Scholar] [CrossRef]
- Hermosilla, R.G. The Guatemala City sinkhole collapses. Carbonates Evaporites 2012, 27, 103–107. [Google Scholar] [CrossRef]
- Yague-Martinez, N.; Prats-Iraola, P.; Gonzalez, F.R.; Brcic, R.; Shau, R.; Geudtner, D.; Eineder, M.; Bamler, R. Interferometric Processing of Sentinel-1 TOPS data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2220–2234. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer: Dordrecht, The Netherlands, 2001. [Google Scholar] [CrossRef] [Green Version]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique (Remote Sensing and Digital Image Processing); Springer: Dordrecht, The Netherlands, 2006; pp. 1–383. [Google Scholar]
- van Leijen, F. Persistent Scatterer Interferometry Based on Geodetic Estimation Theory. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2014. [Google Scholar]
- Kampes, B.M.; Hanssen, R.F. Delft Object-Oriented Radar Interferometric Software: Users Manual and Technical Documentation; Technical Report; Delft University of Technology: Delft, The Netherlands, 2008. [Google Scholar]
- Miranda, N.; Small, D.; Schubert, A.; Meadows, P.; Hajduch, G. Guide to Sentinel-1 Geocoding; Technical Report; University of Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Piantanida, R. Sentinel-1 Level-1 Detailed Algorithm Definition; Technical Report; ESA: Paris, France, 2019. [Google Scholar]
- Teunissen, P.J.G.; Simons, D.G.; Tiberius, C.C.J.M. Probability and Observation Theory; Delft University of Technology: Delft, The Netherlands, 2005. [Google Scholar]
- Sinkhole-Hit GAA Club in County Monaghan Plans New Pitches. Available online: https://www.bbc.com/news/world-europe-46748729 (accessed on 3 January 2019).
- Bowers, S. Large Hole Reappears on Lands Near Mining Network in Co Monaghan. Available online: https://bit.ly/3p4ZPoh (accessed on 20 January 2020).
- Geological Survey-Geohazards. Geological Survey of Ireland. Available online: https://www.gsi.ie/en-ie/data-and-maps/Pages/Geohazards.aspx (accessed on 29 December 2020).
- van Zyl, J.J. The Shuttle Radar Topography Mission (SRTM): A breakthrough in remote sensing of topography. Acta Astronaut. 2001, 48, 559–565. [Google Scholar] [CrossRef]
- Cuenca, M.C. Improving Radar Interferometry for Monitoring Fault-Related Surface Deformation. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Van De Kerkhof, B.; Pankratius, V.; Chang, L.; Van Swol, R.; Hanssen, R.F. Individual Scatterer Model Learning for Satellite Interferometry. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1273–1280. [Google Scholar] [CrossRef]
- Geoengineer. Huge Sinkhole Caused by Mine Collapse in Ireland. Available online: https://www.geoengineer.org/news/huge-sinkhole-caused-by-mine-collapse-in-ireland (accessed on 12 October 2018).
- Qu, F.; Lu, Z.; Zhang, Q.; Bawden, G.W.; Kim, J.W.; Zhao, C.; Qu, W. Mapping ground deformation over Houston–Galveston, Texas using multi-temporal InSAR. Remote Sens. Environ. 2015, 169, 290–306. [Google Scholar] [CrossRef]
- Chang, L.; Stein, A. Exploring PAZ co-polarimetric SAR data for surface movement mapping and scattering characterization. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102280. [Google Scholar] [CrossRef]
- Ketelaar, G.; Bähr, H.; Liu, S.; Piening, H.; Van Der Veen, W.; Hanssen, R.; Van Leijen, F.; Van Der Marel, H.; Samiei-Esfahany, S. Integrated monitoring of subsidence due to hydrocarbon production: Consolidating the foundation. Proc. Int. Assoc. Hydrol. Sci. 2020, 382, 117–123. [Google Scholar] [CrossRef] [Green Version]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to Forget: Continual Prediction with LSTM. Neural Comput. 1999, 12, 2451–2471. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.X.; Montazeri, S.; Ali, M.; Hua, Y.; Wang, Y.; Mou, L.; Shi, Y.; Xu, F.; Bamler, R. Deep Learning Meets SAR. IEEE Geosci. Remote Sens. Mag. 2020, 1–23. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Martins, J.E.; Van Leijen, F.; Hanssen, R.F. Phase Estimation for Distributed Scatterers in InSAR Stacks Using Integer Least Squares Estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef] [Green Version]
- Hu, F.; Wu, J.; Chang, L.; Hanssen, R.F. Incorporating Temporary Coherent Scatterers in Multi-Temporal InSAR Using Adaptive Temporal Subsets. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7658–7670. [Google Scholar] [CrossRef] [Green Version]
- ESA. Copernicus Open Access Hub; ESA: Paris, France, 2021. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inverted Gaussian Model | Cylindrical Model | Conical Model | |
|---|---|---|---|
| Model equation | , | ||
| Model parameters |
| Data | Date Range | Source | Description |
|---|---|---|---|
| Sentinel-1 SLC SAR | April 2015–December 2018 | Alaska Satellite Facility (ASF) | Polarization: VV, Nr. images: 75 |
| Acquisition mode: IW, Track nr.: 1 | |||
| Sentinel-1 Orbit data | April 2015–December 2018 | Copernicus Sentinels POD Data Hub | Orbit type: Precise |
| Parameter | Value |
|---|---|
| Simulation grid size (m) | 10 × 10 |
| Extent of grid () (km) | 63.73 ×43.84 |
| Starting depth of sinkhole (mm) | 0.5 |
| Maximum depth of center (mm) | 100 |
| Temporal baseline (min, max) (year) | (0, 3.65) |
| Epochs | 10 |
| Uncertainty (e) (mm) | 10 |
| Velocity of center (mm · yr) | 25 |
| Simulation Space | ||||
|---|---|---|---|---|
| Scenario S | Scenario L | |||
| Window size (m) | 100 × 100 | 2000 × 2000 | ||
| Stride (m) | 100 × 100 | 2000 × 2000 | ||
| , | (5,5) | (50, 50) | ||
| Scanning Space | ||||
| Scanner 1 | Scanner 2 | Scanner 3 | Scanner 4 | |
| Window size (m) | 2000 × 2000 | 1000 × 1000 | 500 × 500 | 100 × 100 |
| Stride (m) | 2000 × 2000 | 1000 × 1000 | 500 × 500 | 100 × 100 |
| Scanner | Total Grids | Nr. of Scanned Grids | Scanned Area (km) |
|---|---|---|---|
| Scanner 1 | 651 | 499 | 1996 |
| Scanner 2 | 2709 | 1142 | 1142 |
| Scanner 3 | 10,922 | 2819 | 704.75 |
| Scanner 4 | 274,320 | 1964 | 19.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kulshrestha, A.; Chang, L.; Stein, A. Sinkhole Scanner: A New Method to Detect Sinkhole-Related Spatio-Temporal Patterns in InSAR Deformation Time Series. Remote Sens. 2021, 13, 2906. https://doi.org/10.3390/rs13152906
Kulshrestha A, Chang L, Stein A. Sinkhole Scanner: A New Method to Detect Sinkhole-Related Spatio-Temporal Patterns in InSAR Deformation Time Series. Remote Sensing. 2021; 13(15):2906. https://doi.org/10.3390/rs13152906
Chicago/Turabian StyleKulshrestha, Anurag, Ling Chang, and Alfred Stein. 2021. "Sinkhole Scanner: A New Method to Detect Sinkhole-Related Spatio-Temporal Patterns in InSAR Deformation Time Series" Remote Sensing 13, no. 15: 2906. https://doi.org/10.3390/rs13152906
APA StyleKulshrestha, A., Chang, L., & Stein, A. (2021). Sinkhole Scanner: A New Method to Detect Sinkhole-Related Spatio-Temporal Patterns in InSAR Deformation Time Series. Remote Sensing, 13(15), 2906. https://doi.org/10.3390/rs13152906