
Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization





Abstract
:
1. Introduction
2. BP Imaging and Wavenumber Support Region Analysis
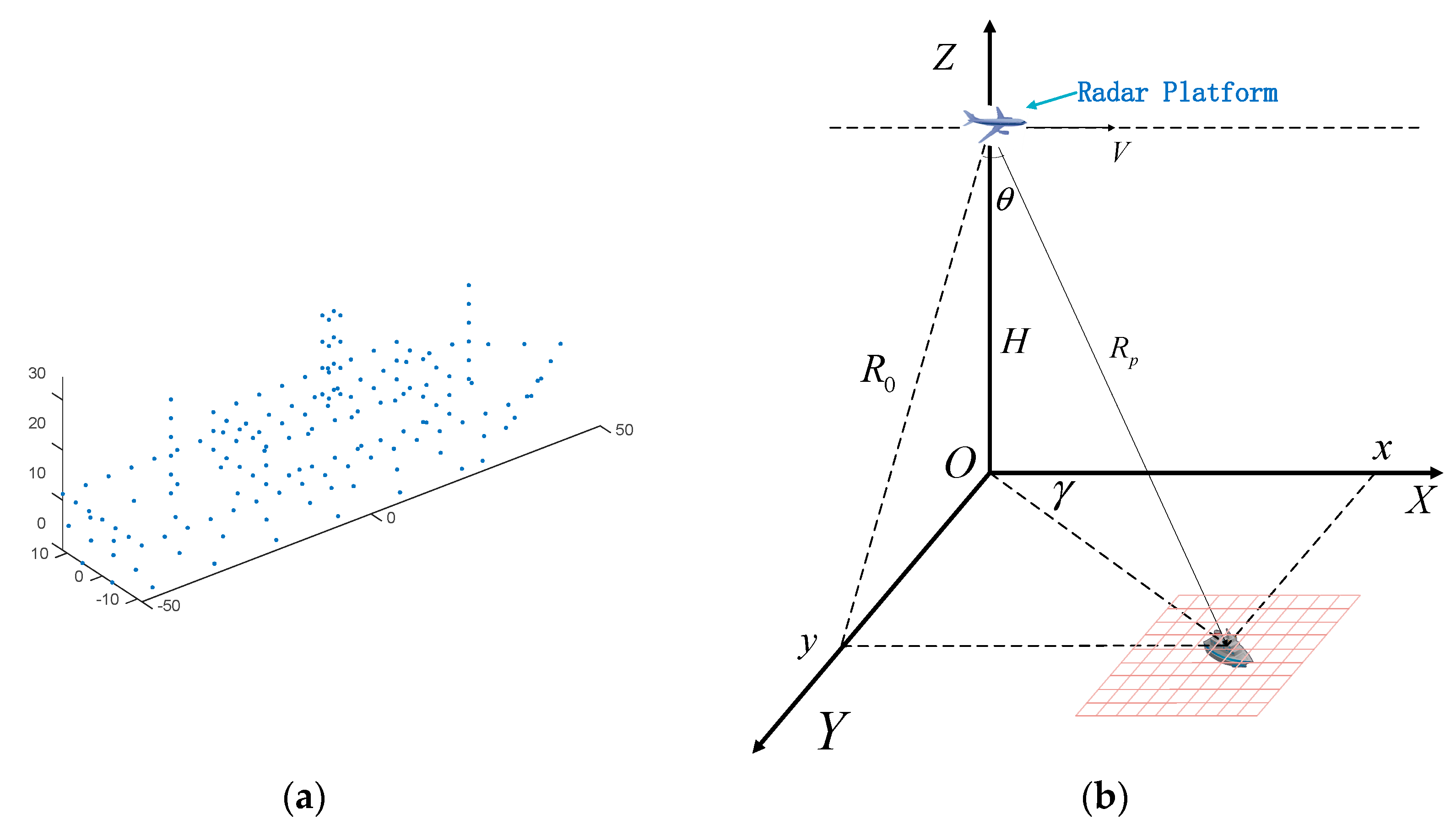
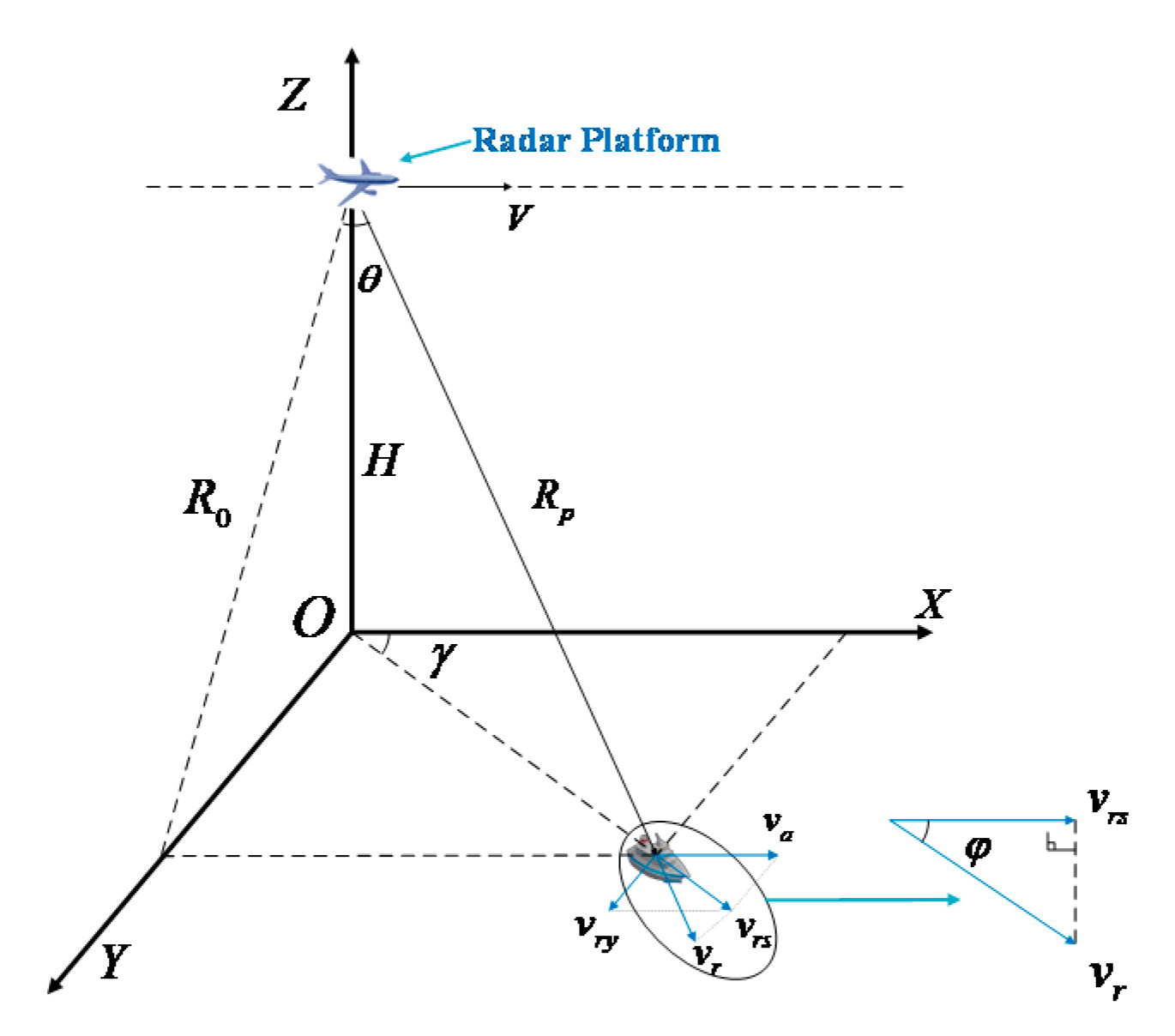
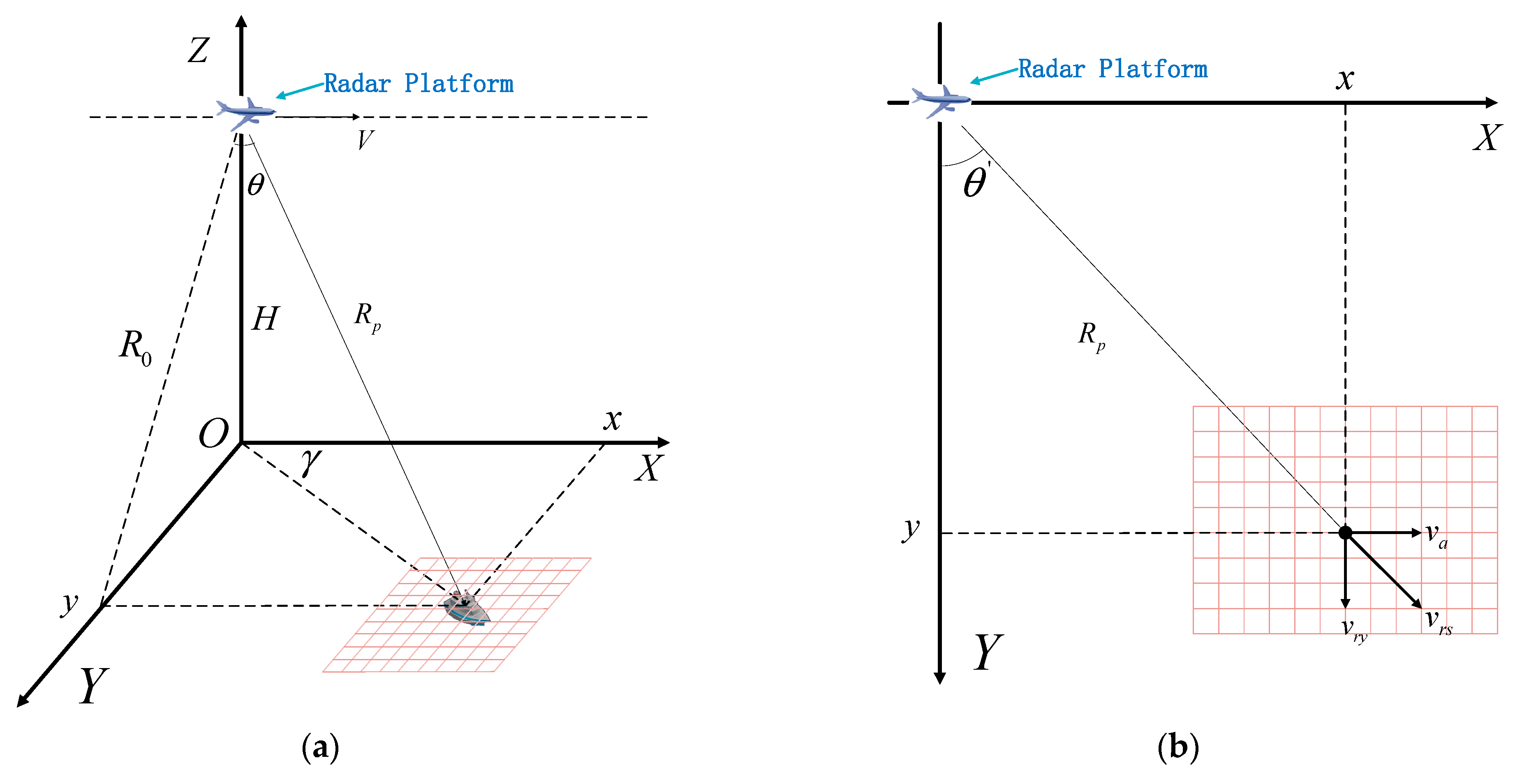
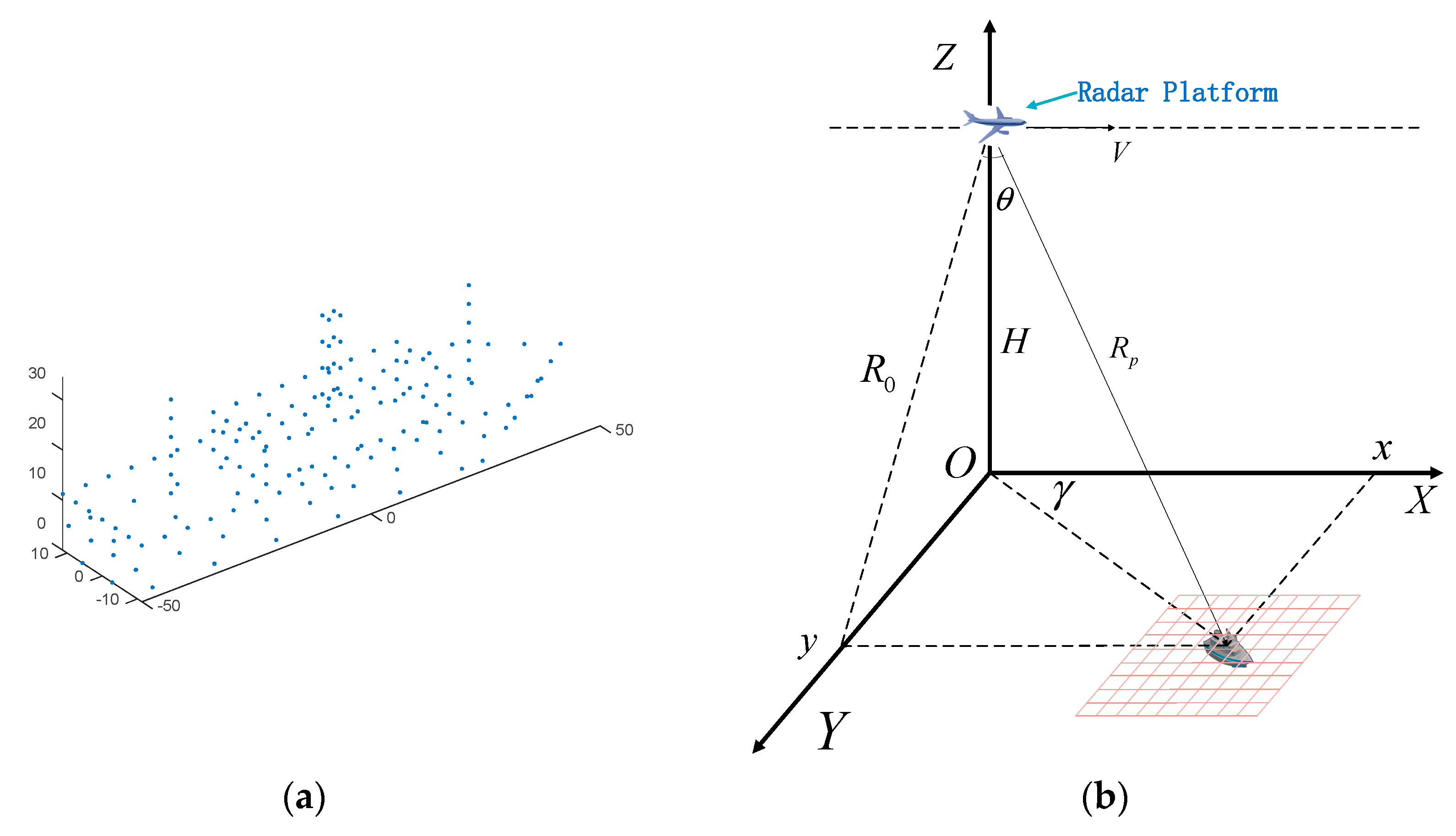
2.1. Signal Model
2.2. BP Algorithm
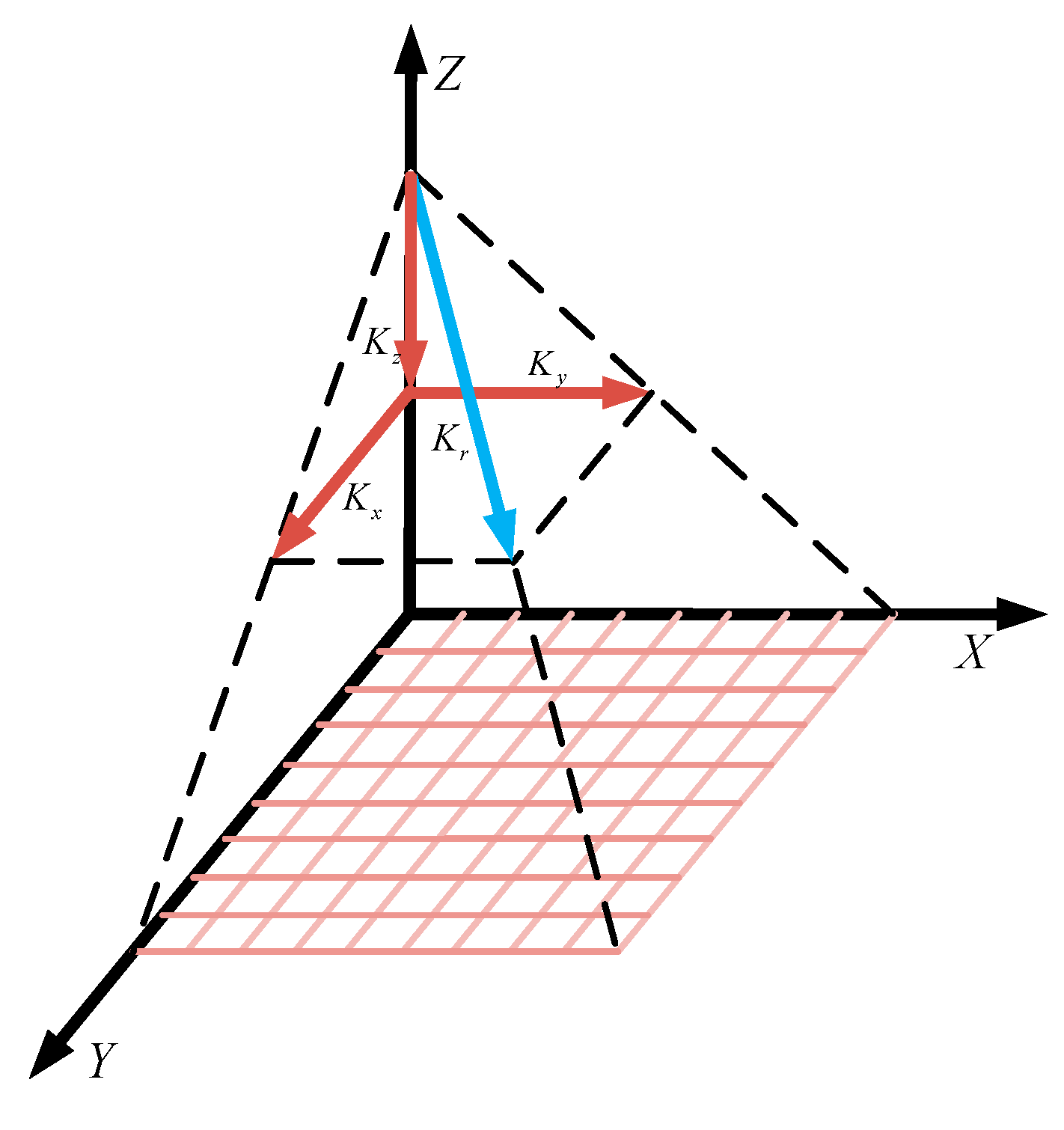
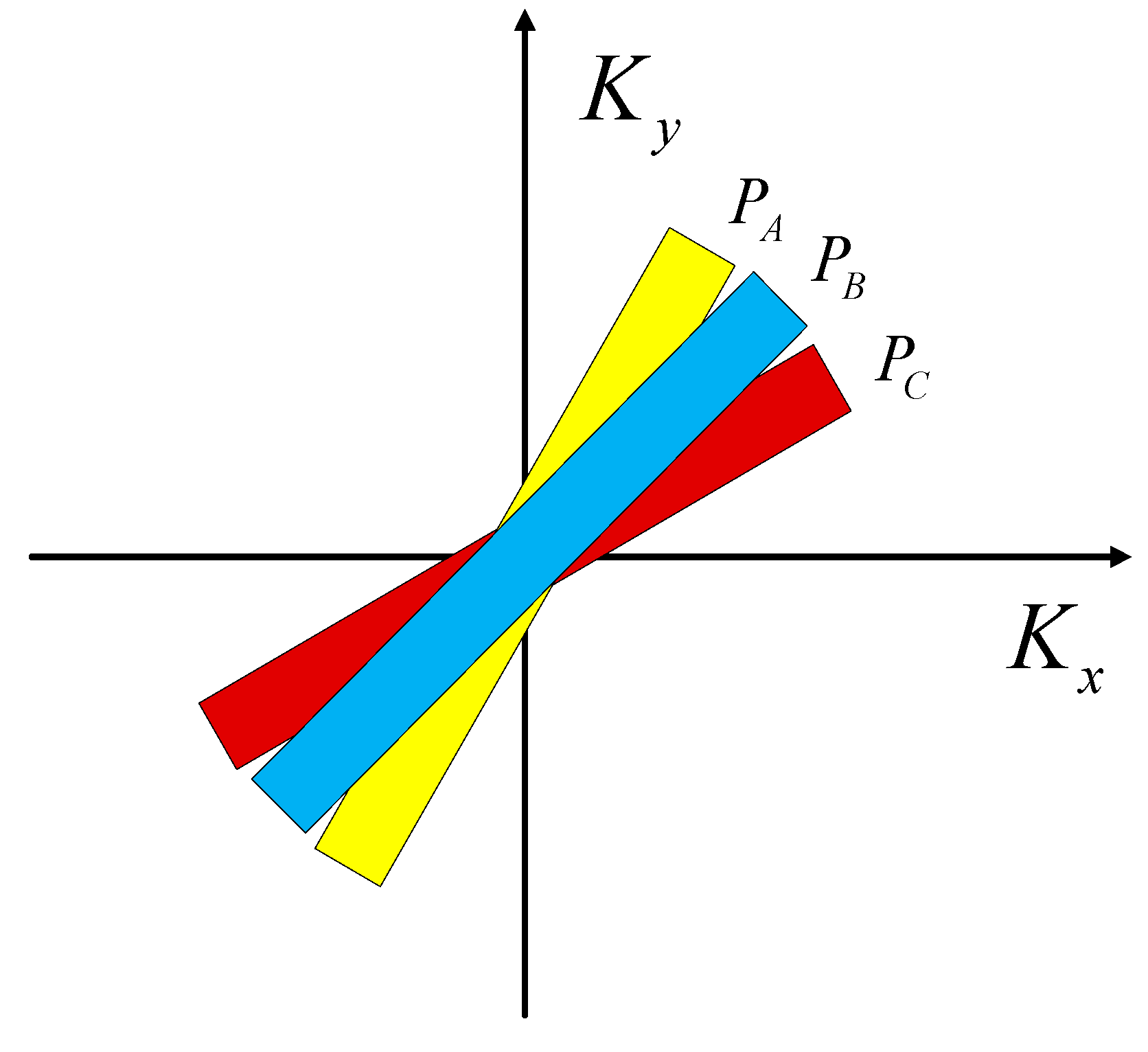
2.3. Wavenumber Support Region Analysis
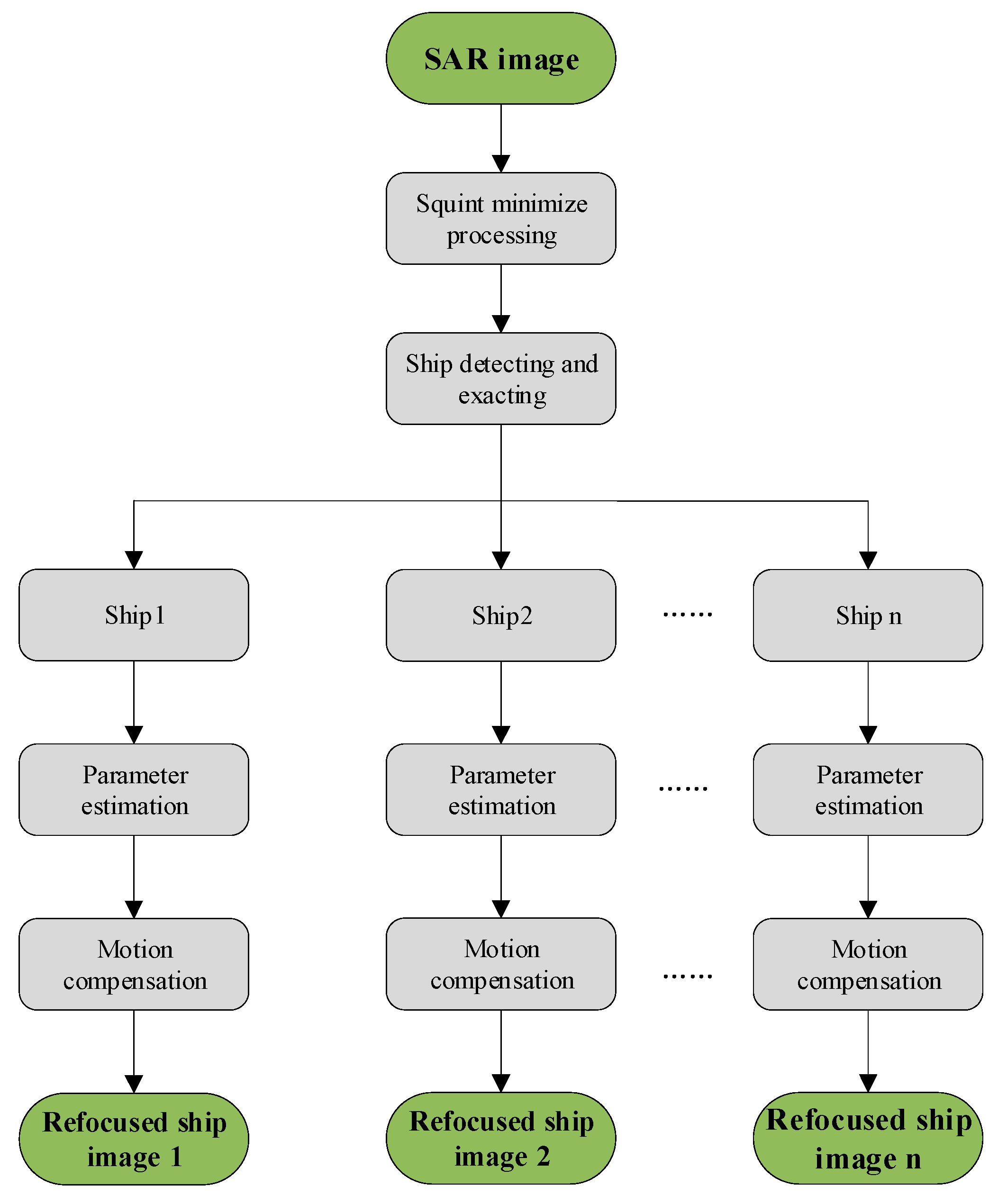
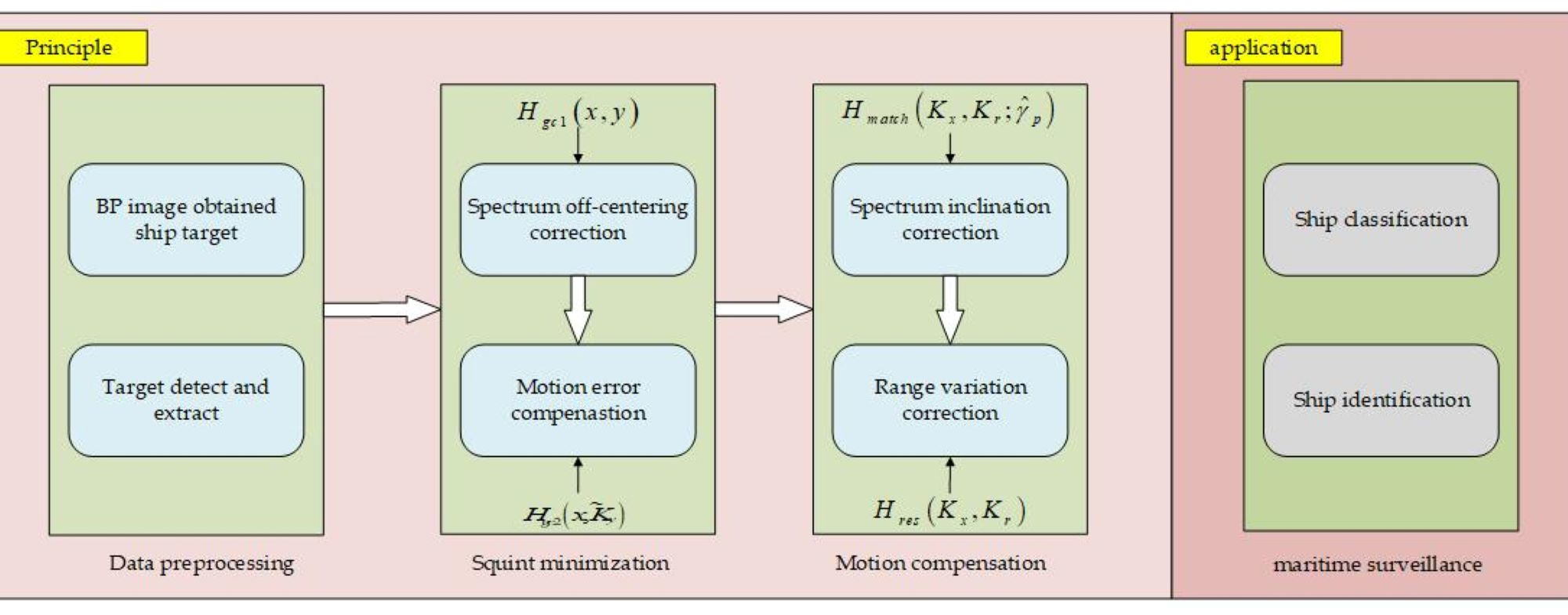
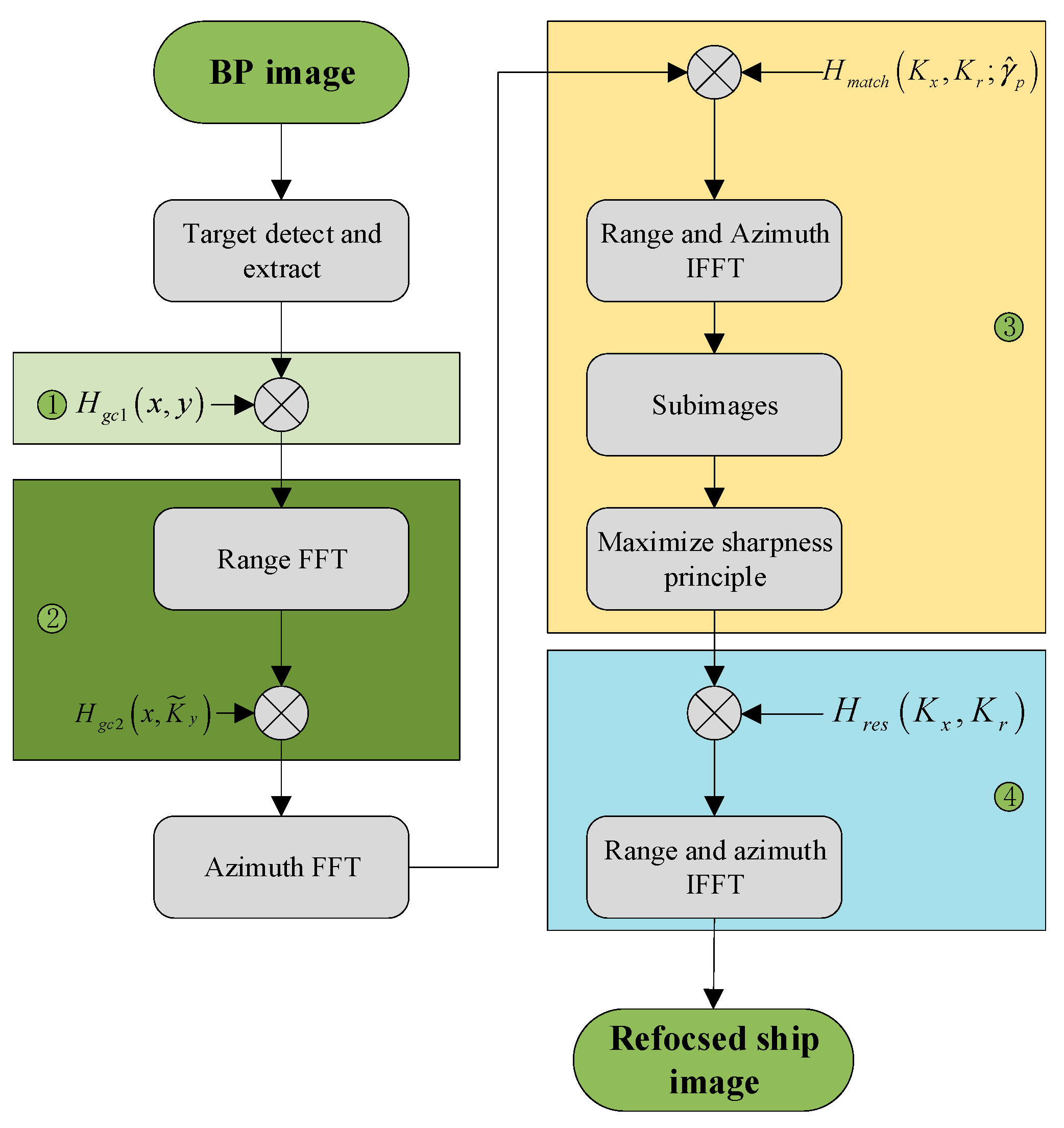
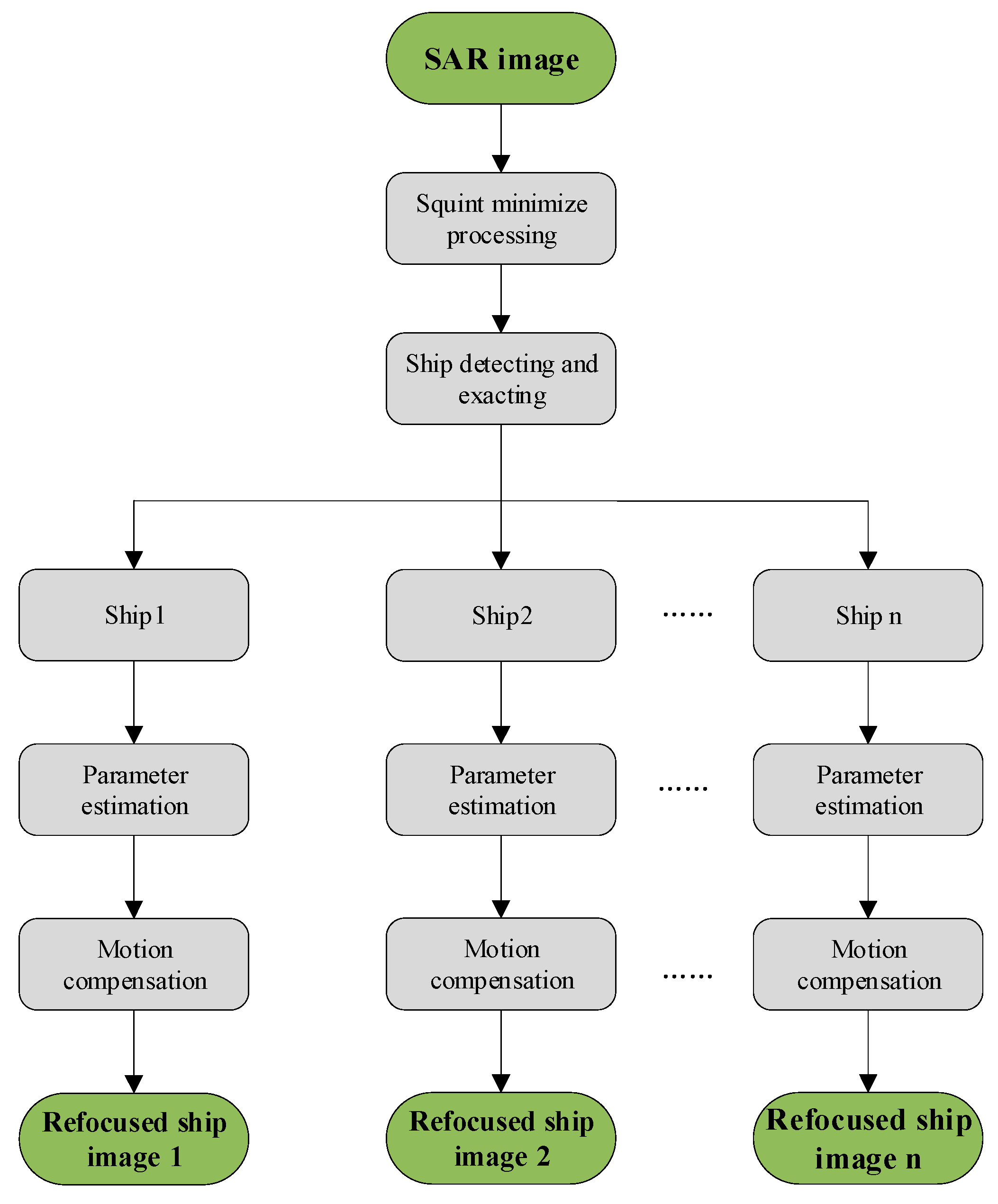
3. The Spectrum-Orthogonalized Refocusing Algorithm
3.1. Squint Minimization Method
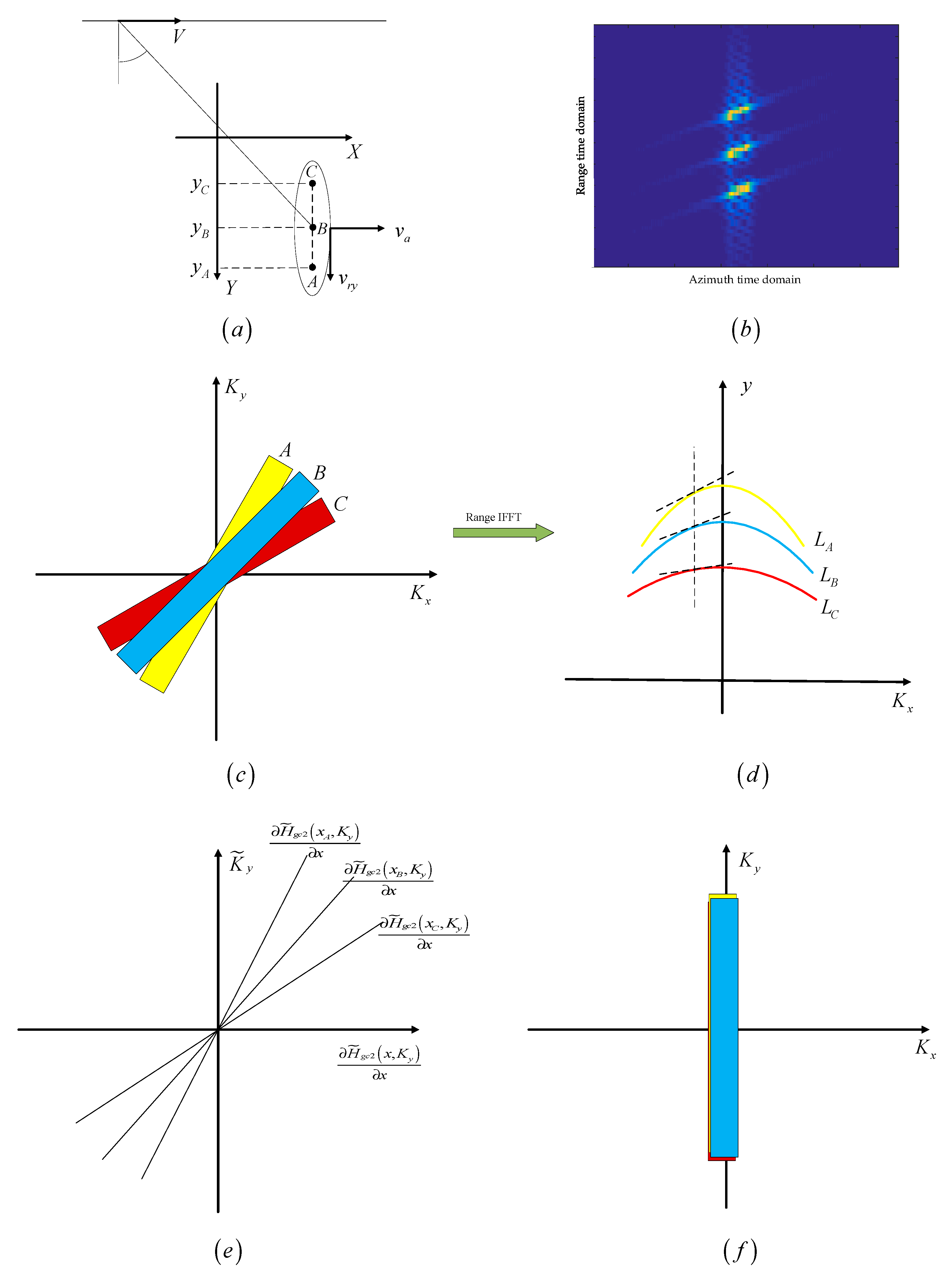
3.1.1. First Step of Squint Minimization for Spectrum Center Alignment
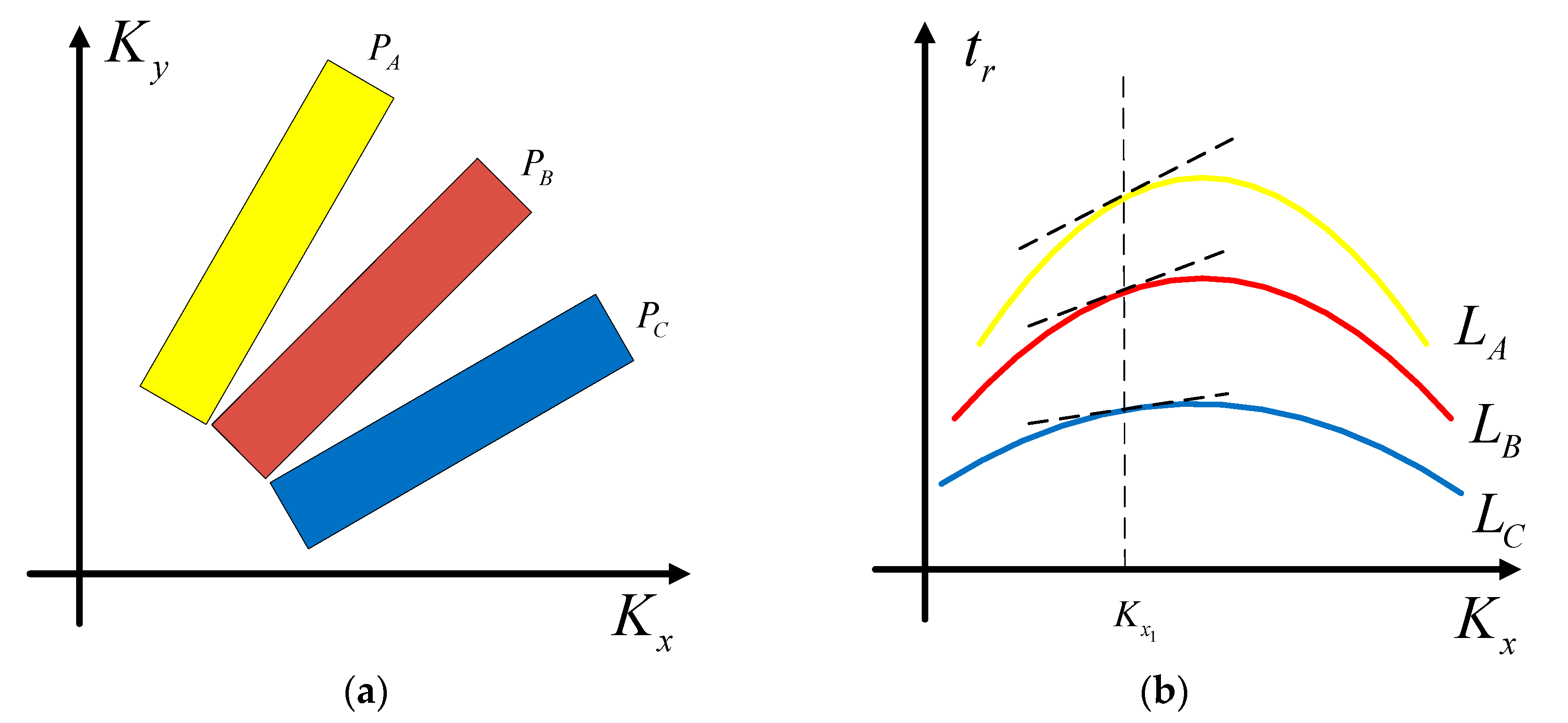
3.1.2. Second Step of Squint Minimization for Spectrum Inclination Correction
- (1)
- Illustration of the second step of squint minimization
- (2)
- Derivation of the second step of squint minimization
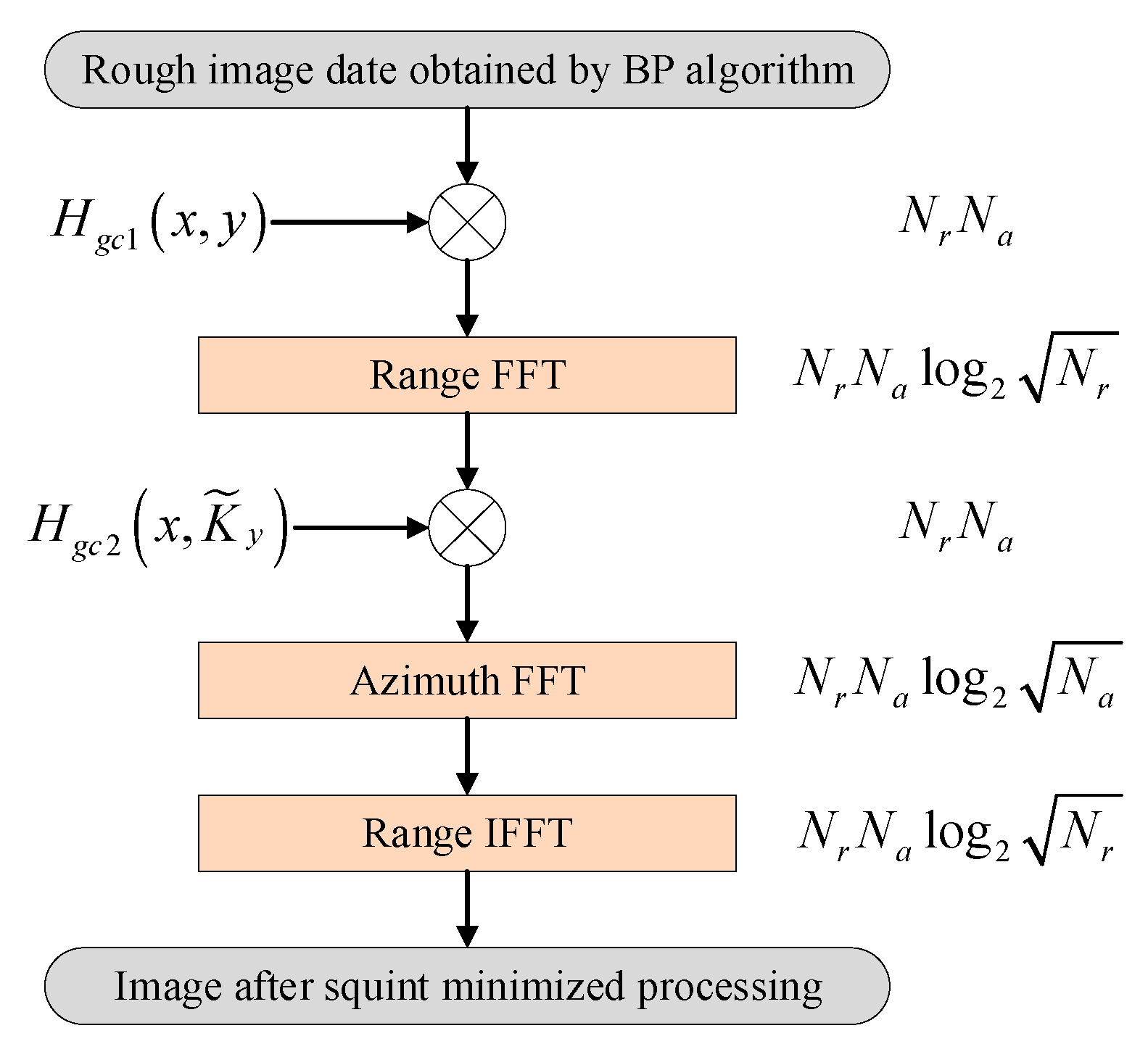
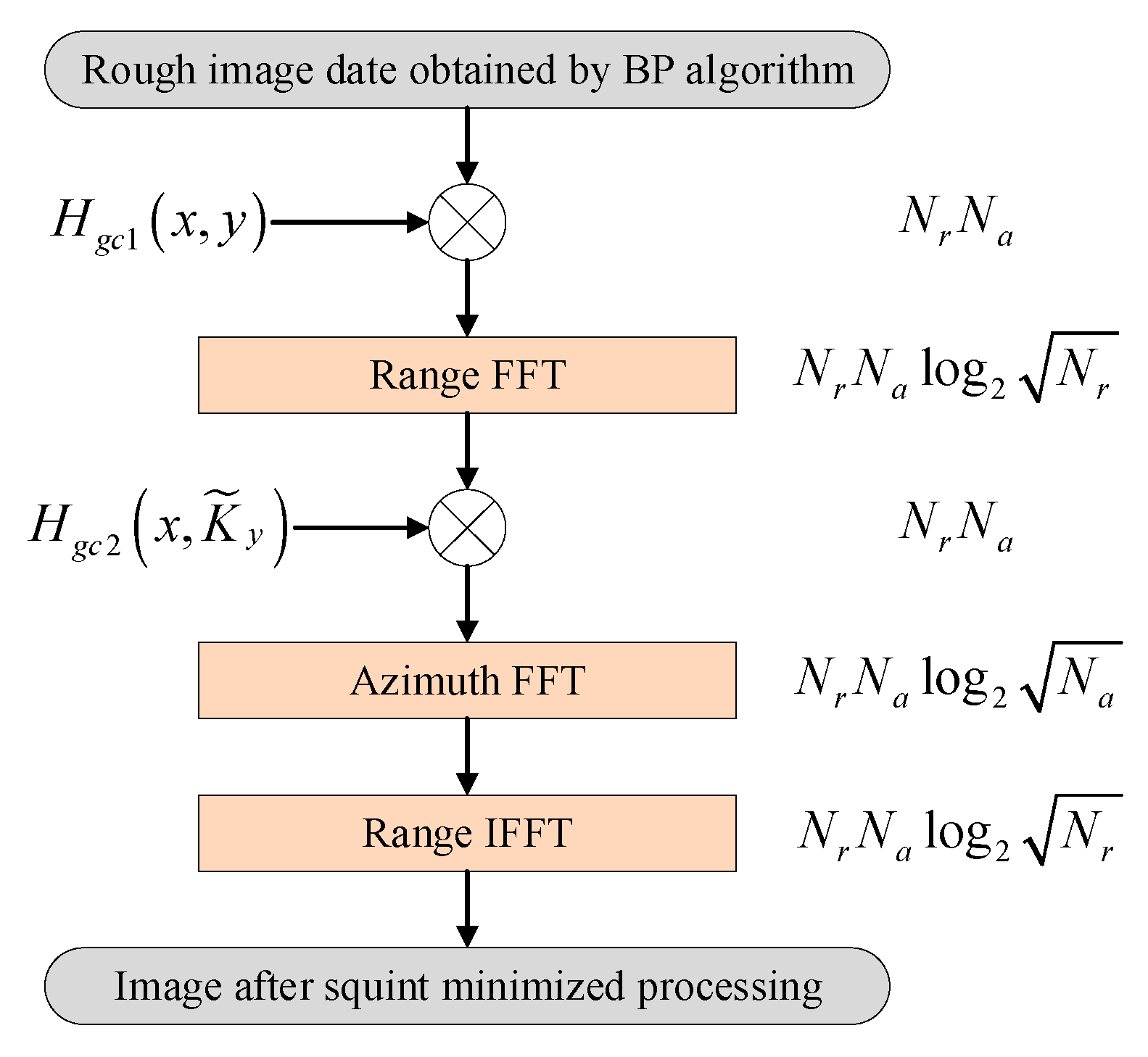
3.1.3. Computational Complexity of the Squint Minimization Process
3.2. Motion Compensation via the Relative Velocity Estimation
4. Simulation and Real Data Results
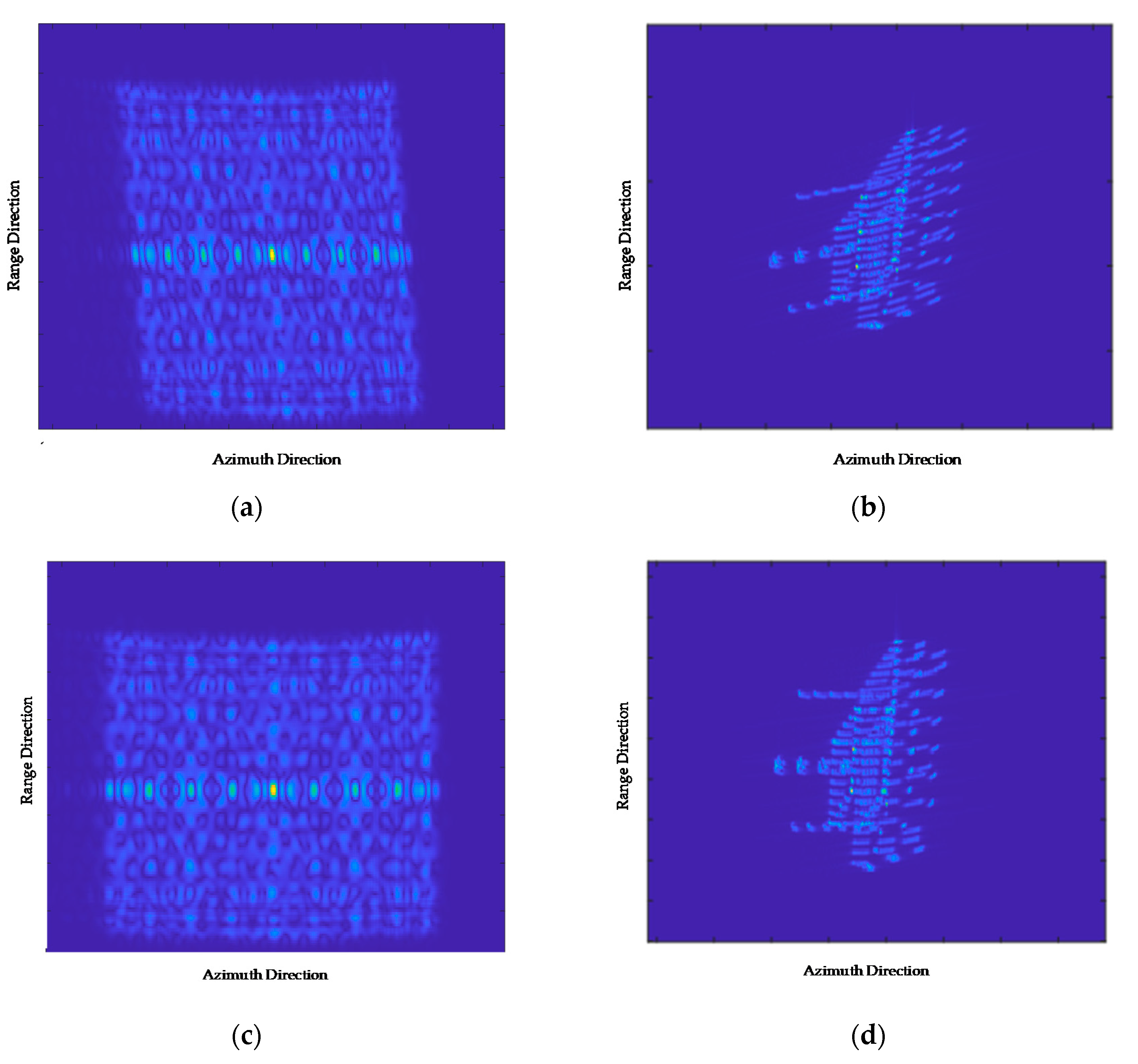
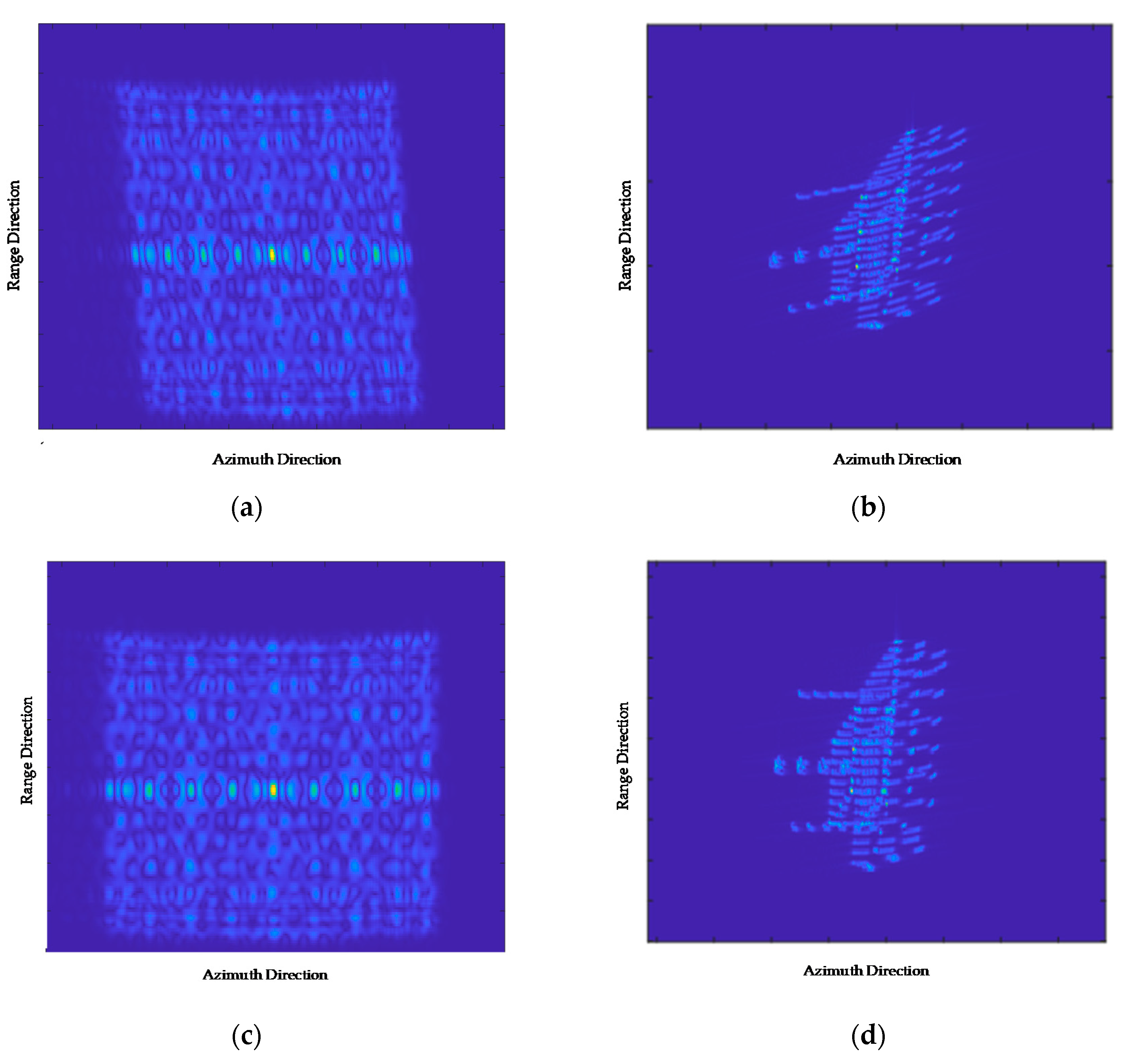
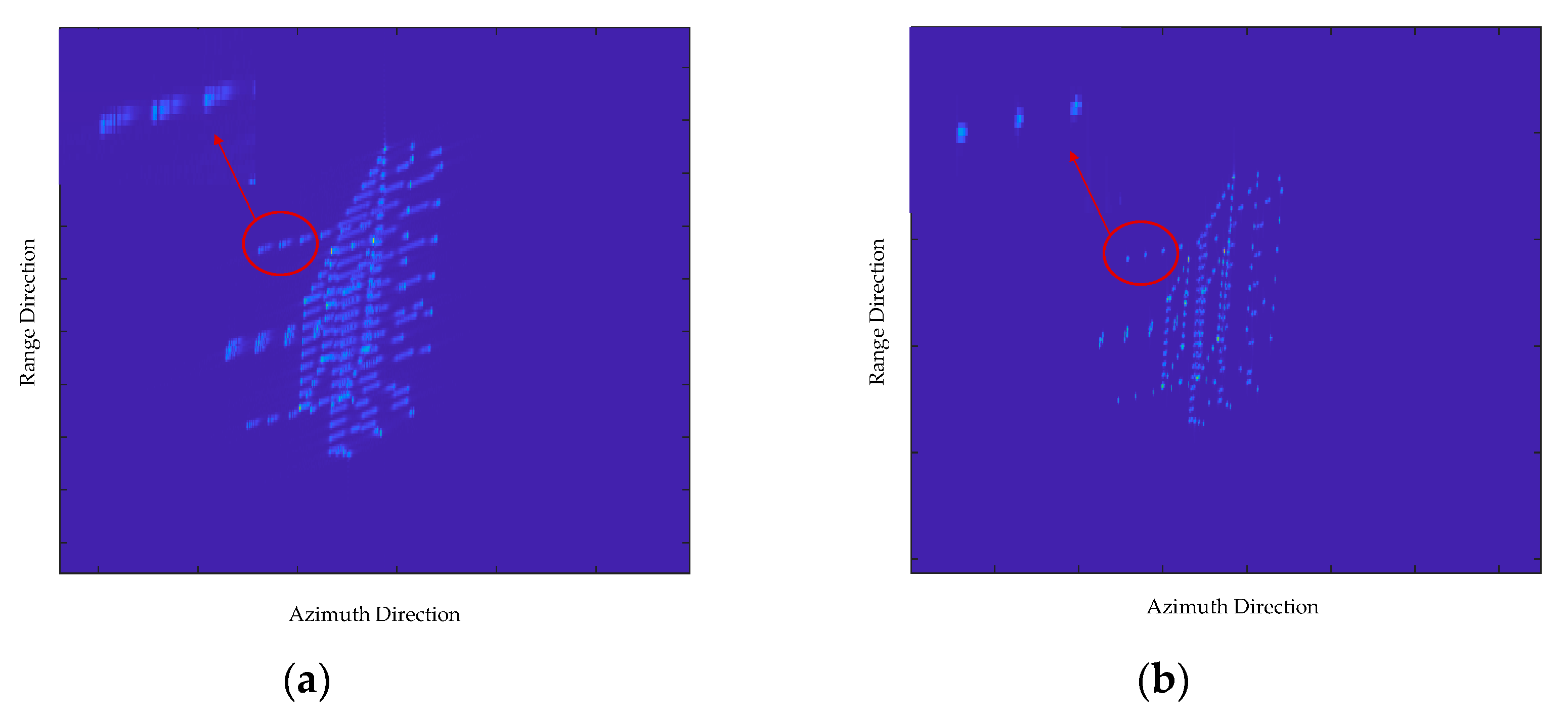
4.1. The Simulation Results for a Ship Target
4.2. Real Data Results
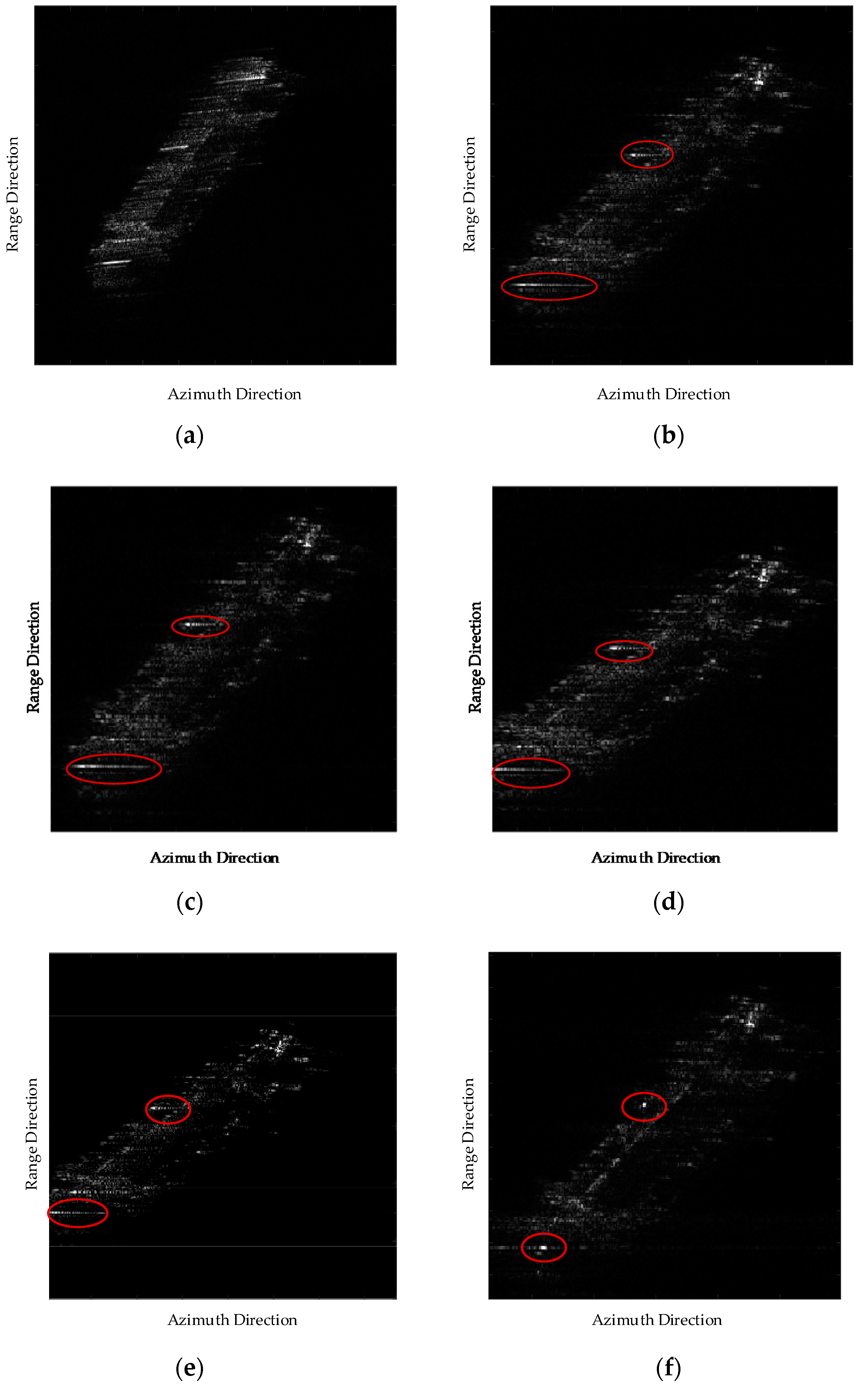
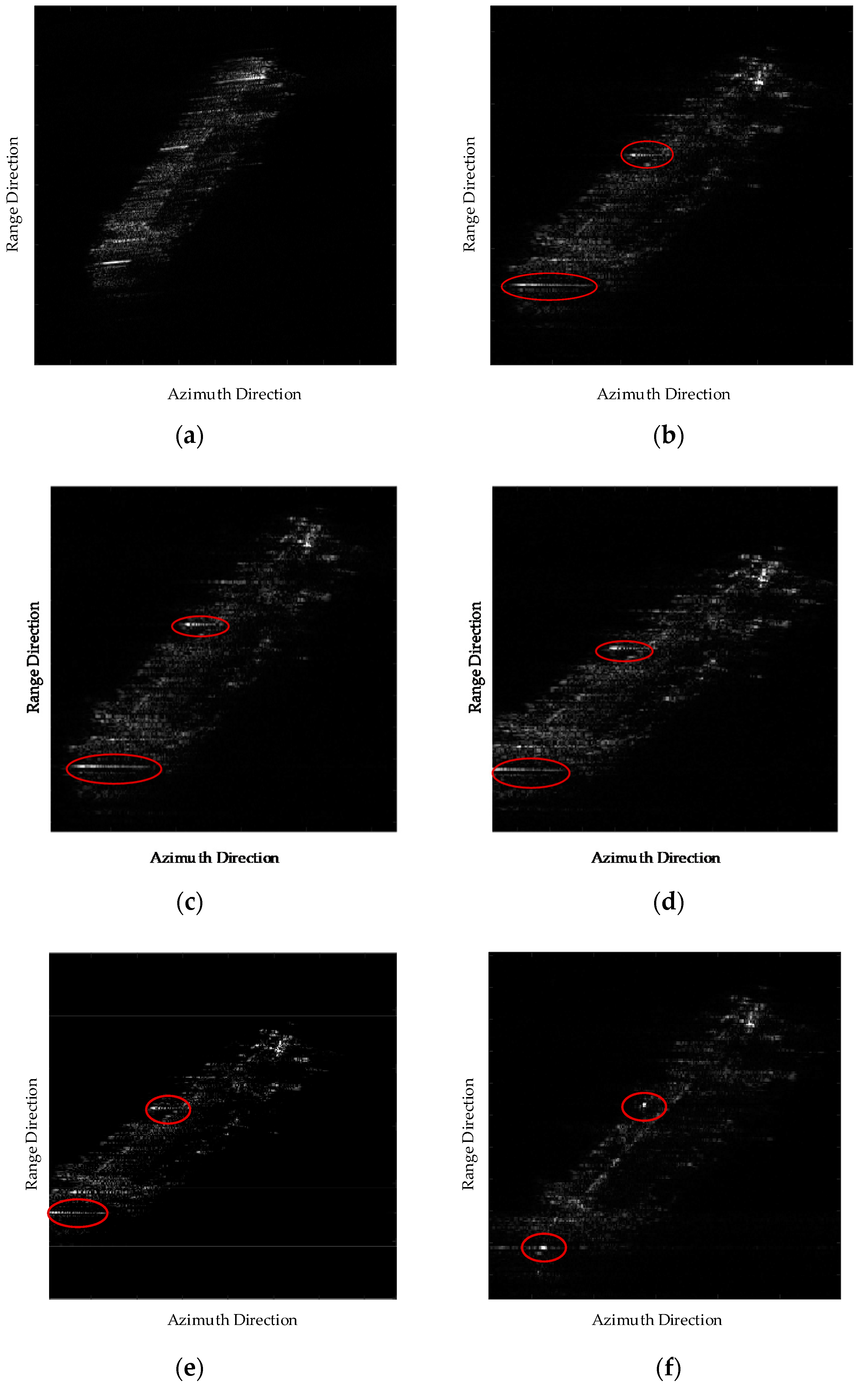
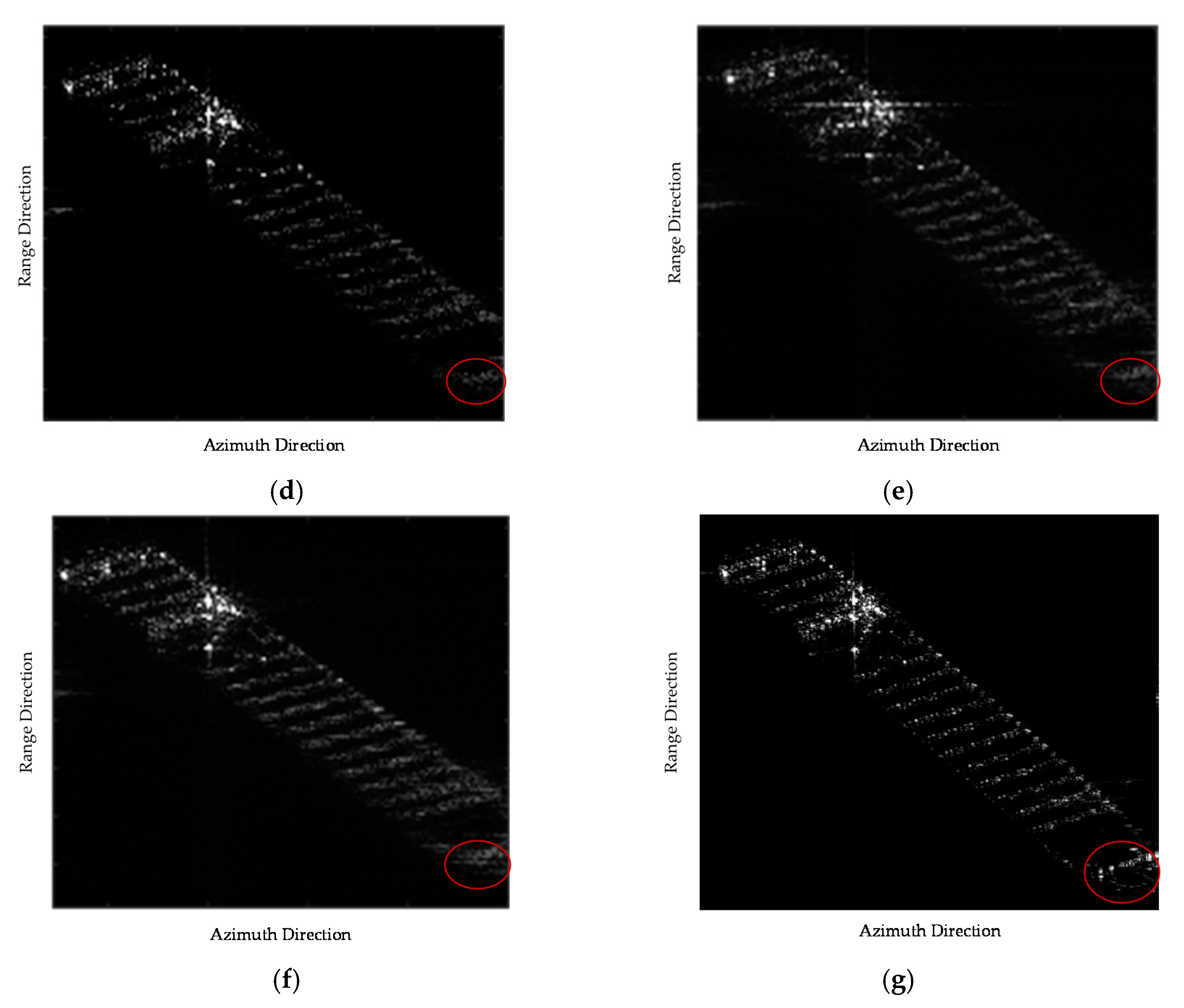
4.2.1. The Imaging Result of Ship NO.1
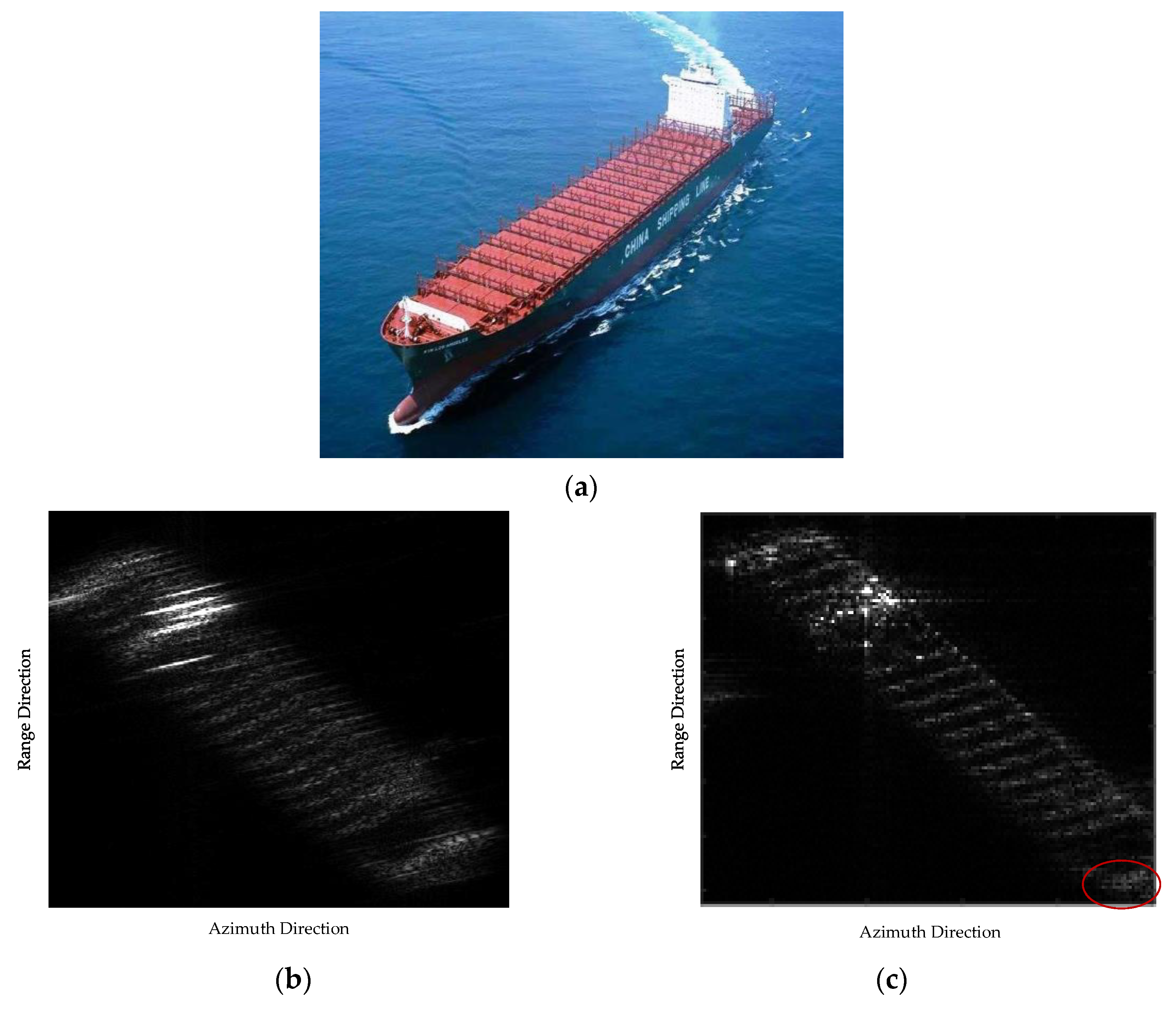
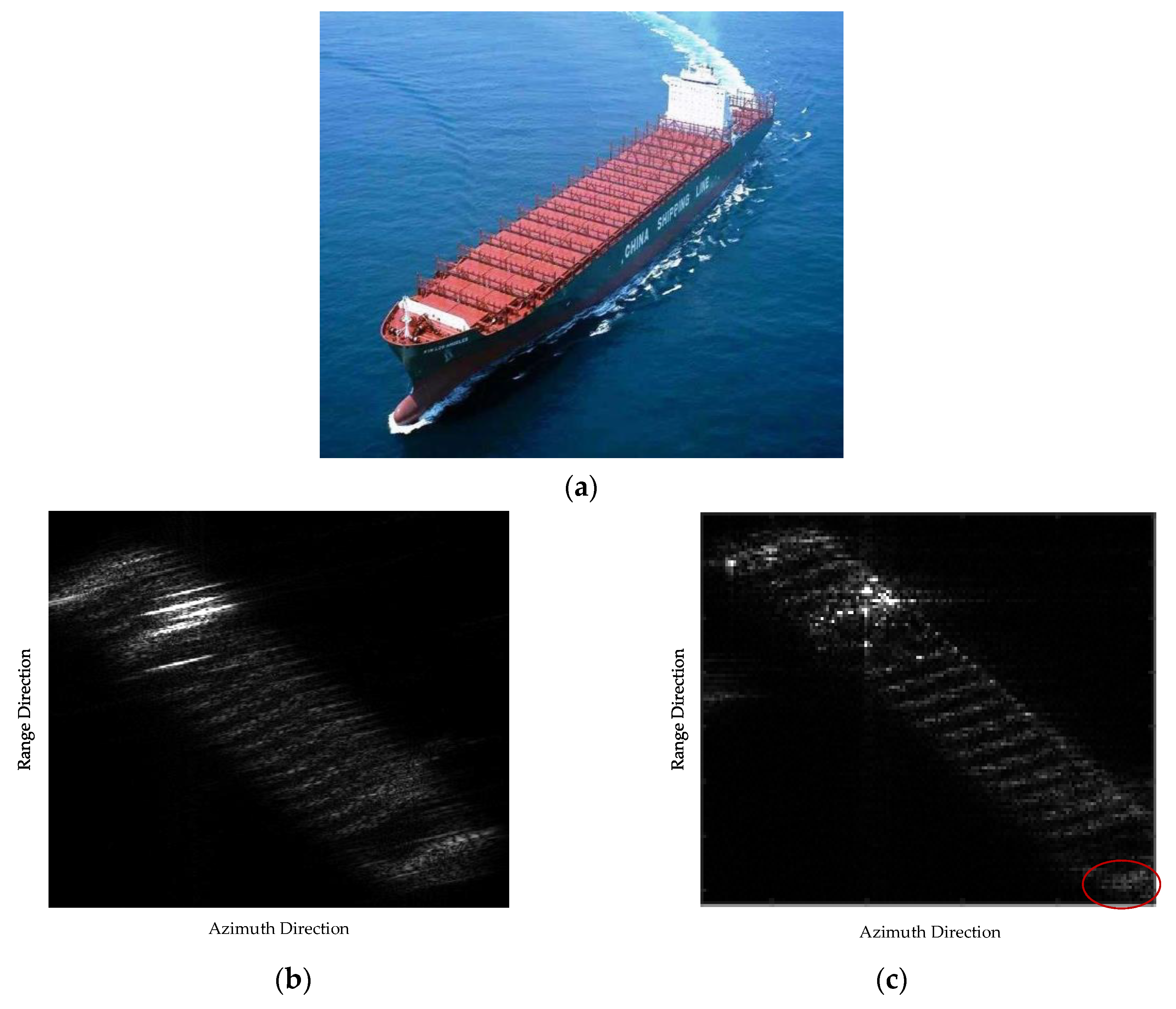
4.2.2. The Imaging Result of Ship NO.2
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Zhang, X.; Liao, G.; Zhu, S.; Gao, Y.; Xu, J. Geometry-information-aided efficient motion parameter estimation for moving-target imaging and location. IEEE Geosci. Remote Sens. Lett. 2015, 12, 155–159. [Google Scholar] [CrossRef]
- Chen, J.; Xing, M.; Xia, X.; Zhang, J.; Liang, B.; Yang, D. SVD-Based Ambiguity Function Analysis for Nonlinear Trajectory SAR. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3072–3087. [Google Scholar] [CrossRef]
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended nonlinear chirp scaling algorithm for high-resolution highly squint SAR data focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Davidson, G.W.; Cumming, I.G.; Ito, M.R. A chirp scaling approach for processing squint mode SAR data. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 121–133. [Google Scholar] [CrossRef]
- Xiong, Y.; Liang, B.; Yu, H.; Chen, J.; Jin, Y.; Xing, M. Processing of Bistatic SAR Data With Nonlinear Trajectory Using a Controlled-SVD Algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 5750–5759. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, J.; Jin, Y.; Yu, H.; Liang, B.; Yang, D. Real-Time Processing of Spaceborne SAR Data With Nonlinear Trajectory Based on Variable PRF. IEEE Trans. Geosci. Remote Sens. 2021, 1–12. [Google Scholar] [CrossRef]
- Li, Z.; Xing, M.; Liang, Y.; Gao, Y.; Chen, J.; Huai, Y.; Zeng, L.; Sun, G.; Bao, Z. A frequency-domain imaging algorithm for highly squinted SAR mounted on maneuvering platforms with nonlinear trajectory. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4023–4038. [Google Scholar] [CrossRef]
- Wang, P.; Liu, W.; Chen, J.; Niu, M.; Yang, W. A high-order imaging algorithm for high-resolution spaceborne SAR based on a modified equivalent squint range model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1225–1235. [Google Scholar] [CrossRef] [Green Version]
- Bie, B.; Xing, M.; Xia, X.; Sun, G.; Liang, Y.; Jing, G.; Wei, T.; Yu, Y. A frequency domain backprojection algorithm based on local cartesian coordinate and subregion range migration correction for high-squint SAR mounted on maneuvering platforms. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7086–7101. [Google Scholar] [CrossRef]
- Zhang, S.; Xing, M.; Xia, X.; Zhang, L.; Guo, R.; Bao, Z. Focus improvement of high-squint SAR based on azimuth dependence of quadratic range cell migration correction. IEEE Geosci. Remote Sens. Lett. 2013, 10, 150–154. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Liu, Q.H. Frequency-domain backprojection algorithm for synthetic aperture radar imaging. IEEE Geosci. Remote Sens. Lett. 2015, 12, 905–909. [Google Scholar] [CrossRef]
- Ran, L.; Liu, Z.; Zhang, L.; Xie, R.; Li, T. Multiple local autofocus back-projection algorithm for space-variant phase-error correction in synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1241–1245. [Google Scholar] [CrossRef]
- Desai, M.D.; Jenkins, W.K. Convolution backprojection image reconstruction for spotlight mode synthetic aperture radar. IEEE Trans. Image Process. 1992, 1, 505–517. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Li, H.; Qiao, Z.; Xu, Z. A fast BP algorithm with wavenumber spectrum fusion for high-resolution spotlight SAR imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1460–1464. [Google Scholar] [CrossRef]
- Vu, V.T.; Pettersson, M.I. Fast backprojection algorithms based on subapertures and local polar coordinates for general bistatic airborne SAR systems. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2706–2712. [Google Scholar] [CrossRef]
- Chen, L.; An, D.; Huang, X. Extended autofocus backprojection algorithm for low-frequency SAR imaging. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1323–1327. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, L.; Zhao, L.; Bi, G. Quasi-polar-based FFBP algorithm for miniature UAV SAR imaging without navigational data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7053–7065. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Huai, Y.; Ding, J.; Wang, H.; Xing, M. A modified ω-k algorithm for HS-SAR small-aperture data imaging. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3710–3721. [Google Scholar] [CrossRef]
- Li, N.; Wang, R.; Deng, Y.; Chen, J.; Zhang, Z.; Liu, Y.; Zhao, F.; Gong, X.; Xu, Z. Extension and evaluation of PGA in ScanSAR mode using full-aperture approach. IEEE Geosci. Remote Sens. Lett. 2015, 12, 870–874. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Phase gradient autofocus-a robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Jiang, R.; Mao, X.; Zhu, Z. Multi-subaperture PGA for SAR autofocusing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 468–488. [Google Scholar] [CrossRef]
- Li, Z.; Quegan, S.; Chen, J.; Rogers, N.C. Performance analysis of phase gradient autofocus for compensating ionospheric phase scintillation in BIOMASS P-band SAR data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1367–1371. [Google Scholar] [CrossRef]
- Van Rossum, W.L.; Otten, M.P.G.; Van Bree, R.J.P. Extended PGA for range migration algorithms. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 478–488. [Google Scholar] [CrossRef]
- Martorella, M.; Berizzi, F.; Haywood, B. Contrast maximisation based technique for 2-D ISAR autofocusing. IEE Proc. Radar Sonar Navig. 2005, 152, 253–262. [Google Scholar] [CrossRef] [Green Version]
- Noviello, C.; Fornaro, G.; Martorella, M. Focused SAR image formation of moving targets based on doppler parameter estimation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3460–3470. [Google Scholar] [CrossRef]
- Chen, Y.; Li, G.; Zhang, Q.; Sun, J. Refocusing of moving targets in SAR images via parametric sparse representation. Remote Sens. 2017, 9, 795. [Google Scholar] [CrossRef] [Green Version]
- Dong, Q.; Xing, M.; Xia, X.; Zhang, S.; Sun, G. Moving target refocusing algorithm in 2-D wavenumber domain after BP integral. IEEE Geosci. Remote Sens. Lett. 2018, 15, 127–131. [Google Scholar] [CrossRef]
- Werness, S.A.S.; Carrara, W.G.; Joyce, L.S.; Franczak, D.B. Moving target imaging algorithm for SAR data. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 57–67. [Google Scholar] [CrossRef]
- Sommer, A.; Ostermann, J. Backprojection subimage autofocus of moving ships for synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8383–8393. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjogren, T.K.; Pettersson, M.I.; Gustavsson, A.; Ulander, L.M.H. Detection of moving targets by focusing in UWB SAR—theory and experimental results. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3799–3815. [Google Scholar] [CrossRef]
- Wu, J.; Li, Z.; Huang, Y.; Yang, J.; Liu, Q.H. A Generalized Omega-K Algorithm to Process Translationally Variant Bistatic-SAR Data Based on Two-Dimensional Stolt Mapping. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6597–6614. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Liu, Q.H. Interpolation-free stolt mapping for SAR imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 926–929. [Google Scholar] [CrossRef]
- Sheng, J.; Xing, M.; Zhang, L.; Mehmood, M.Q.; Yang, L. ISAR cross-range scaling by using sharpness maximization. IEEE Geosci. Remote Sens. Lett. 2015, 12, 165–169. [Google Scholar] [CrossRef]
- Han, B.; Ding, C.; Zhong, L.; Liu, J.; Qiu, X.; Hu, Y.; Lei, B. The GF-3 SAR data processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Yu, W.; Deng, Y. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, G.; Xiang, J.; Xing, M.; Yang, J.; Guo, L. A channel phase error correction method based on joint quality function of GF-3 SAR dual-channel images. Sensors 2018, 18, 3131. [Google Scholar] [CrossRef] [Green Version]
- Shang, M.; Qiu, X.; Han, B.; Ding, C.; Hu, Y. Channel imbalances and along-track baseline estimation for the GF-3 azimuth multichannel mode. Remote Sens. 2019, 11, 1297. [Google Scholar] [CrossRef] [Green Version]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous imaging of static scenes and moving targets with the first Chinese dual-channel spaceborne SAR sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [Green Version]
- Yelmanov, S.; Romanyshyu, Y. A generalized description for the perceived contrast of image elements. In Proceedings of the 2018 IEEE Second International Conference on Data Stream Mining & Processing (DSMP), Lviv, Ukraine, 21–25 August 2018; IEEE: Lviv, Ukraine, 2018; pp. 488–493. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 9.6 GHz |
| Range bandwidth | 450 MHz |
| Pulse repetition frequency | 600 Hz |
| Sampling frequency | 700 MHz |
| Radar platform velocity | 110 m/s |
| Nearest slant range | 8000 m |
| Synthetic aperture time | 1 s |
| Squint angle | 30° |
| Criteria | PGA | CS-ISAR | DPEA | BPSA | Ours |
|---|---|---|---|---|---|
| Contrast | |||||
| Entropy | 6.16 | 5.61 | 6.23 | 5.97 | 5.41 |
| Time | 1.23 s | 25.04 s | 4.11 s | 36.01 s | 4.13 s |
| Criteria | PGA | CS-ISAR | DPEA | BPSA | Ours |
|---|---|---|---|---|---|
| Contrast | |||||
| Entropy | 5.78 | 5.76 | 6.73 | 6.01 | 4.92 |
| Time | 1.24 s | 30.21 s | 6.18 s | 57.46 s | 5.63 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, X.; Bao, M.; Sun, G.; Han, L.; Zhang, Y.; Xing, M. Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization. Remote Sens. 2021, 13, 2807. https://doi.org/10.3390/rs13142807
Tong X, Bao M, Sun G, Han L, Zhang Y, Xing M. Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization. Remote Sensing. 2021; 13(14):2807. https://doi.org/10.3390/rs13142807
Chicago/Turabian StyleTong, Xuyao, Min Bao, Guangcai Sun, Liang Han, Yu Zhang, and Mengdao Xing. 2021. "Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization" Remote Sensing 13, no. 14: 2807. https://doi.org/10.3390/rs13142807
APA StyleTong, X., Bao, M., Sun, G., Han, L., Zhang, Y., & Xing, M. (2021). Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization. Remote Sensing, 13(14), 2807. https://doi.org/10.3390/rs13142807