
Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets †




Abstract
:
1. Introduction
1.1. Context and Motivation
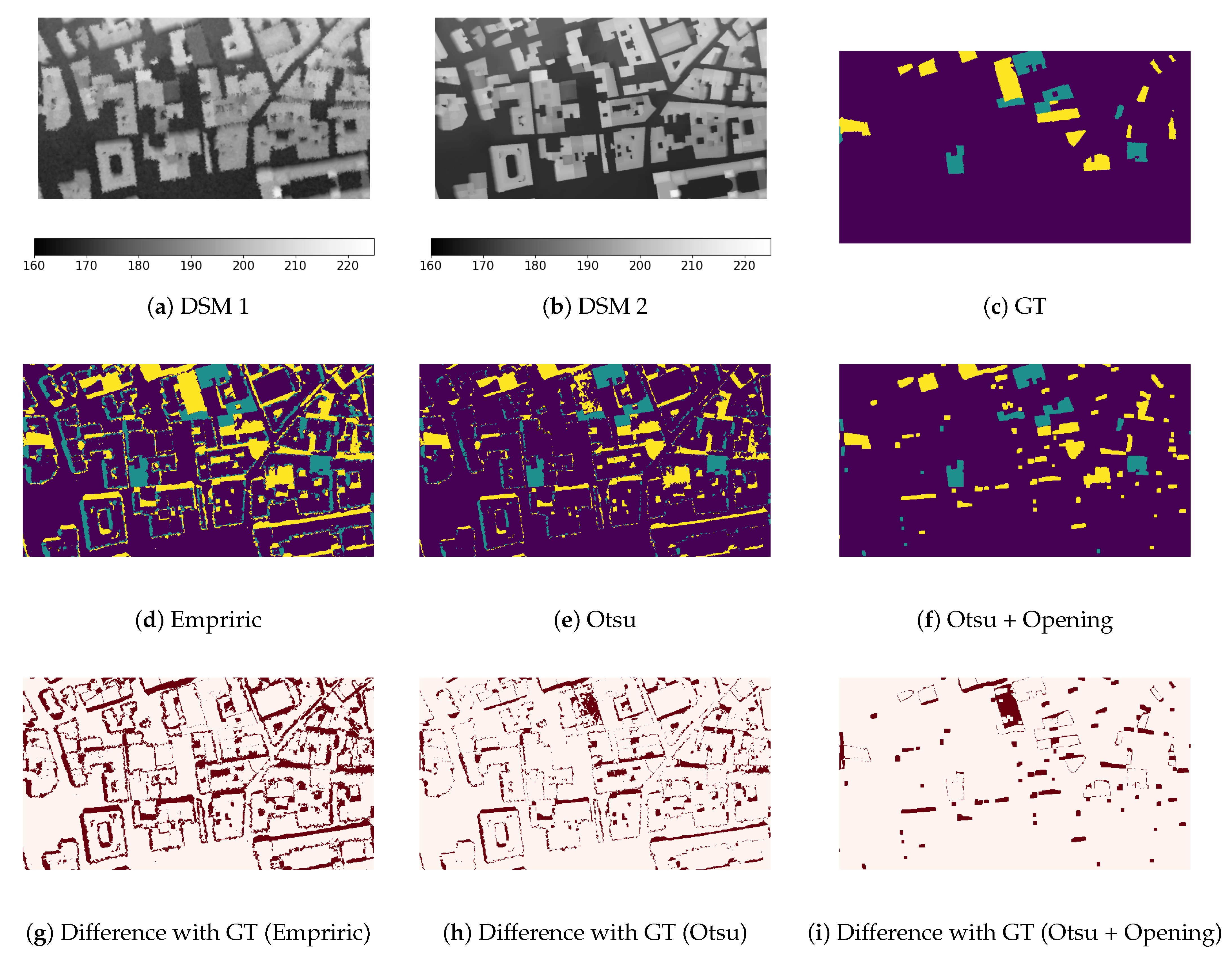
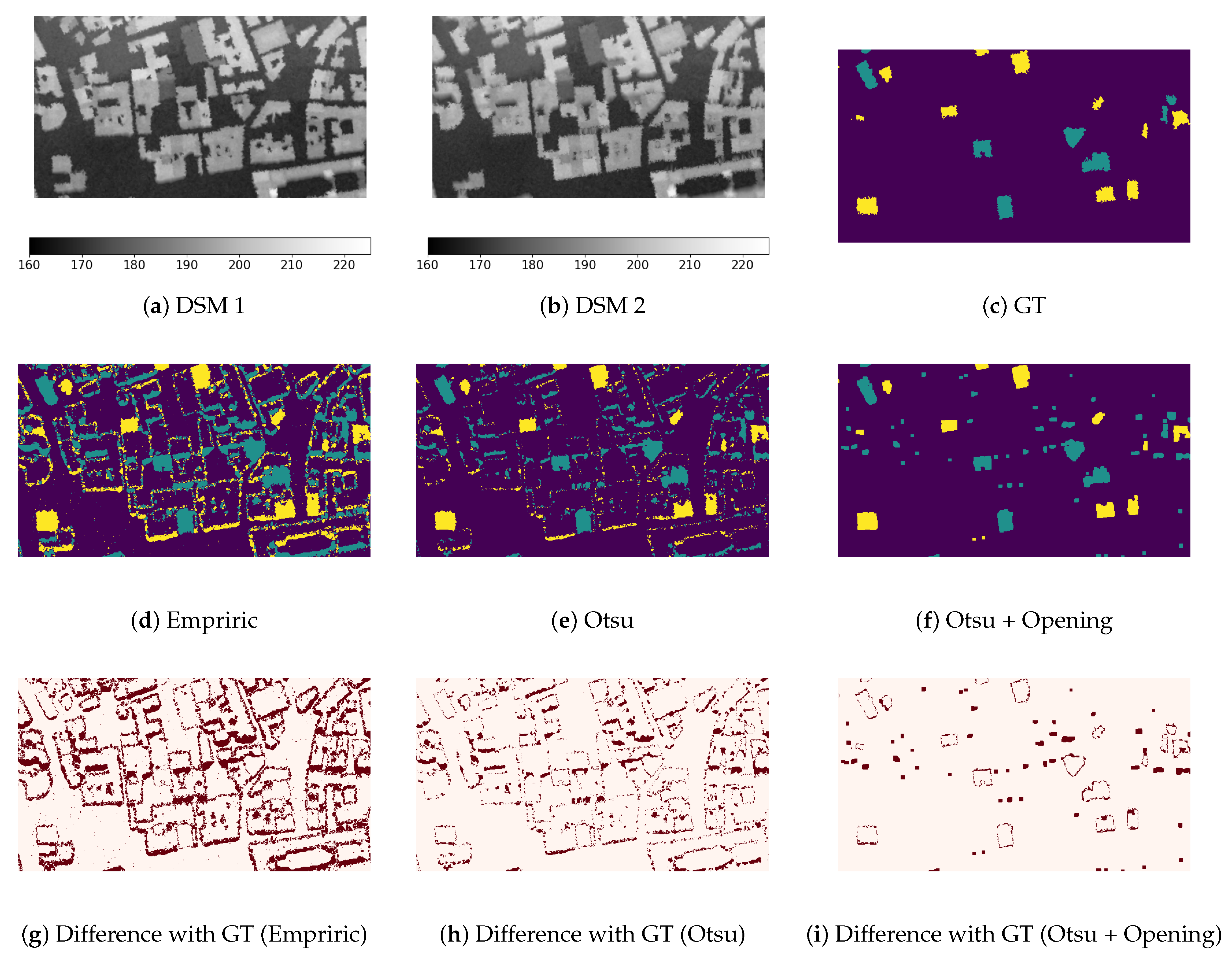
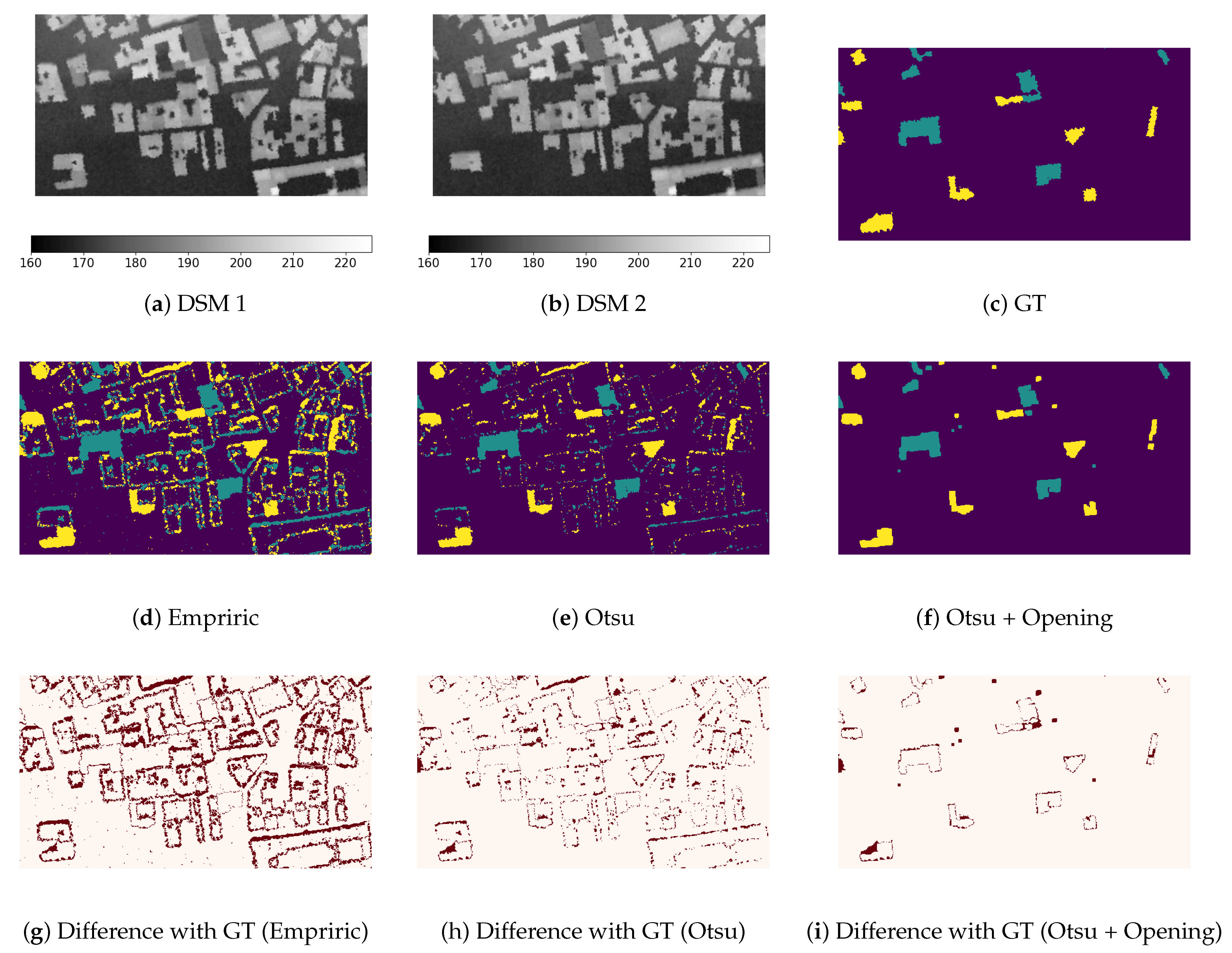
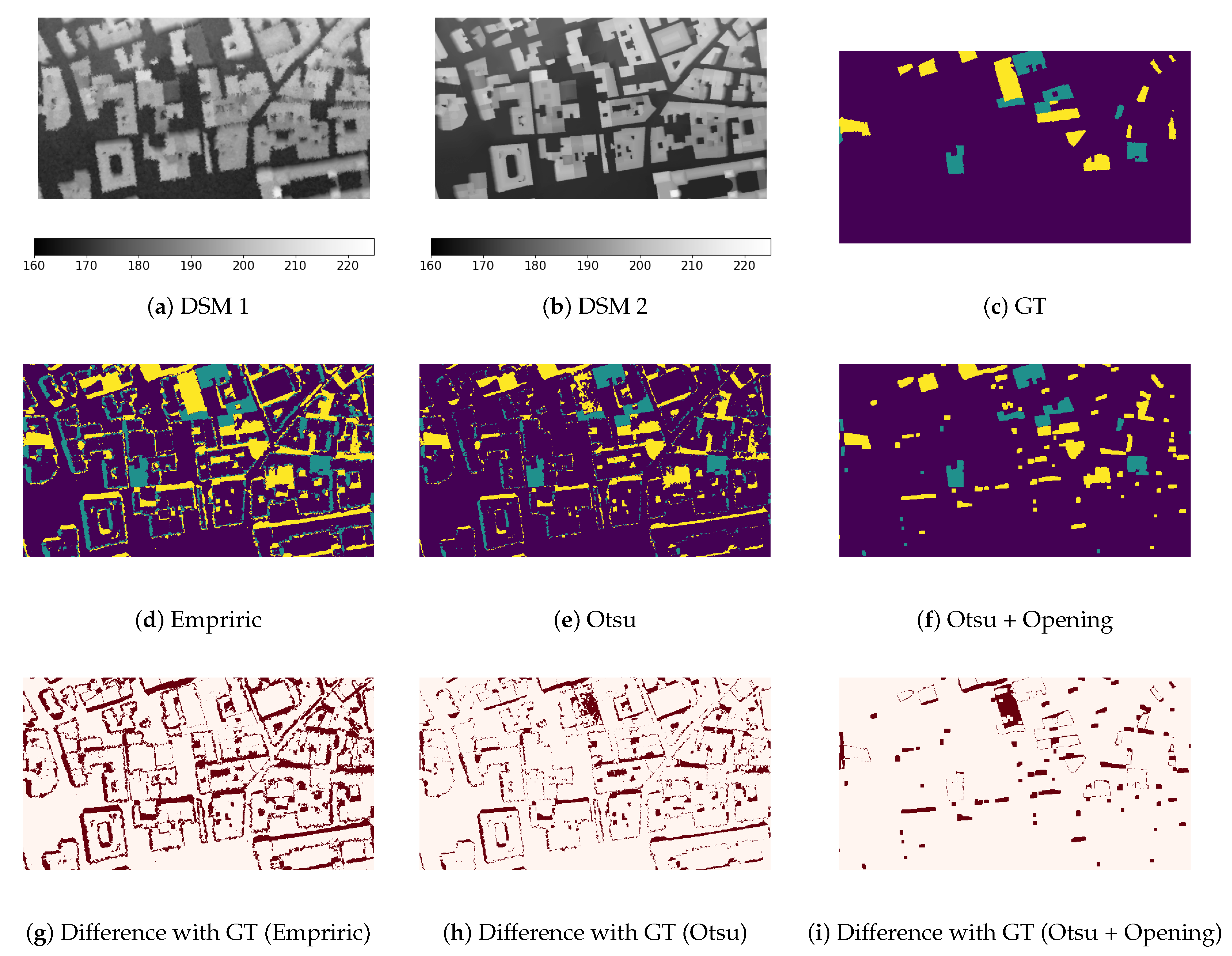
1.2. Digital Surface Model-Based Change Detection Methods
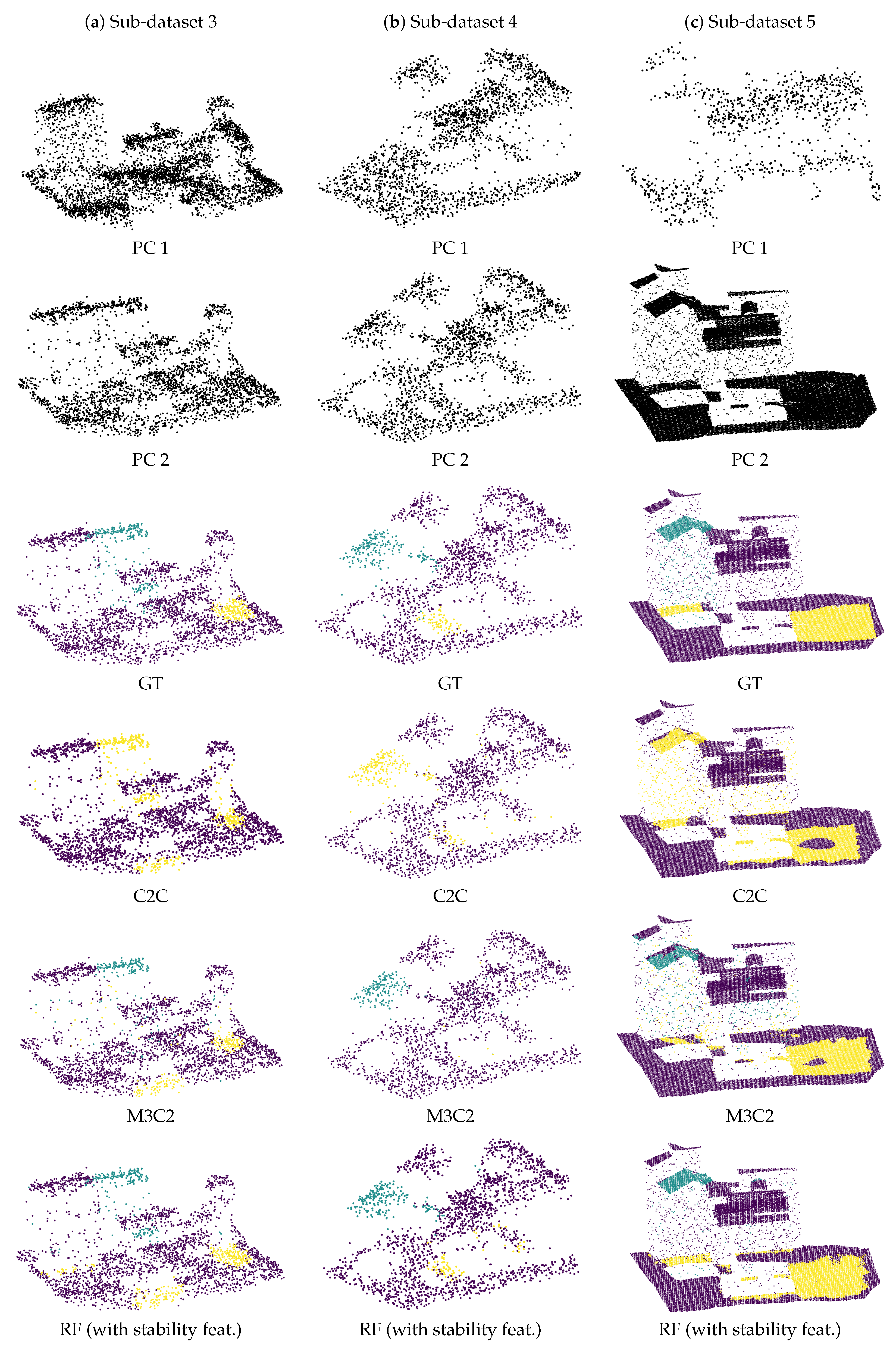
1.3. Point Cloud-Based Change Detection Methods
1.4. Contributions
2. Materials and Methods
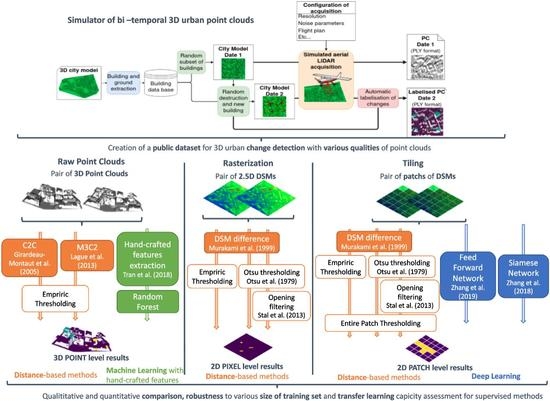
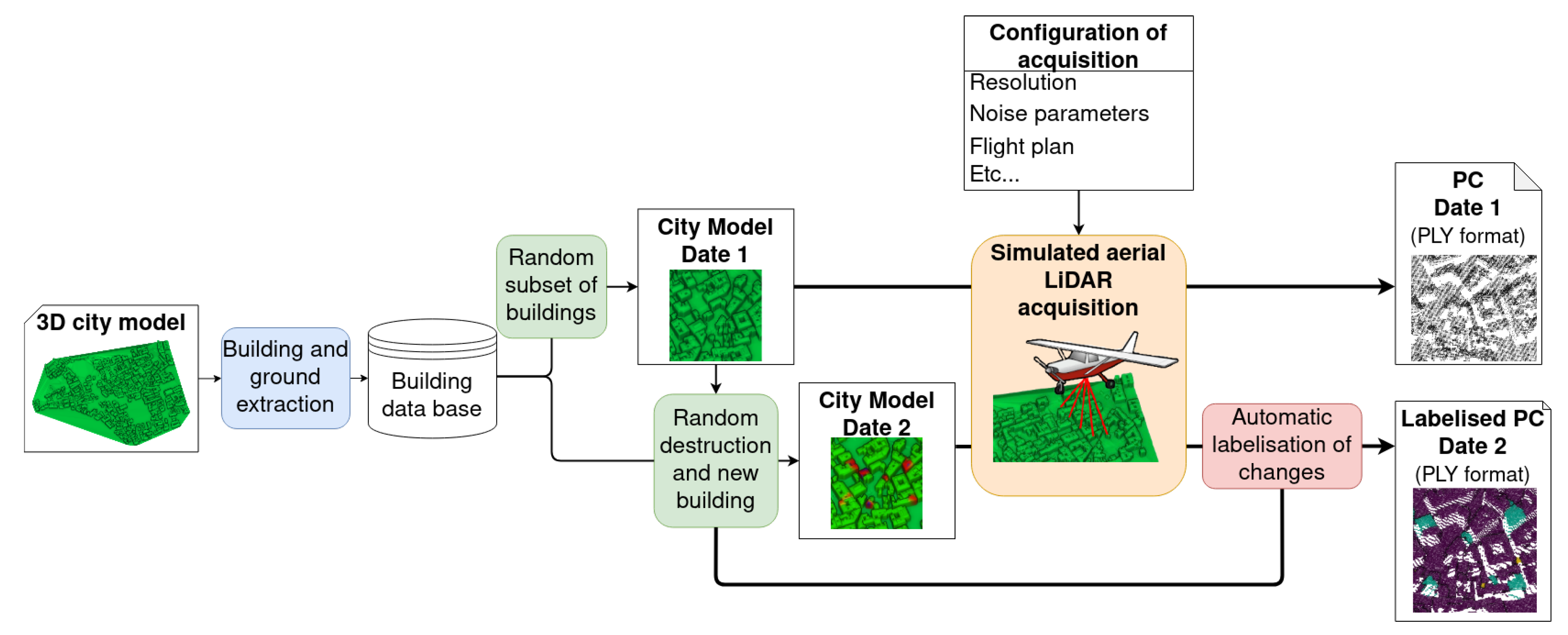
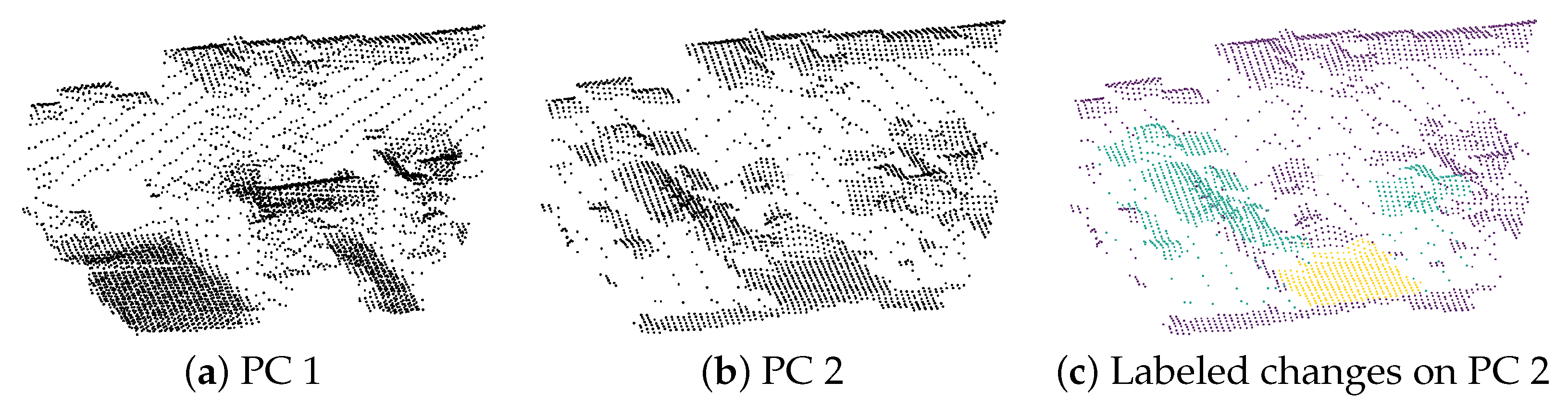
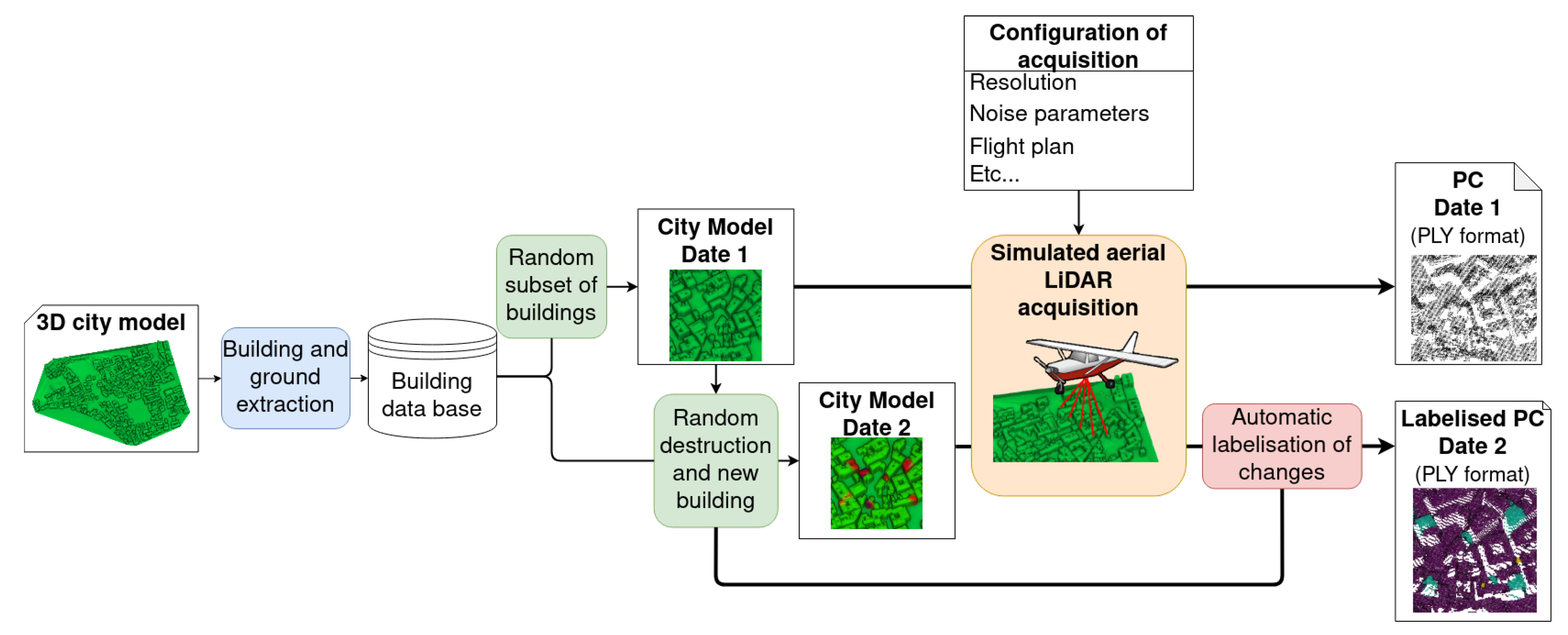
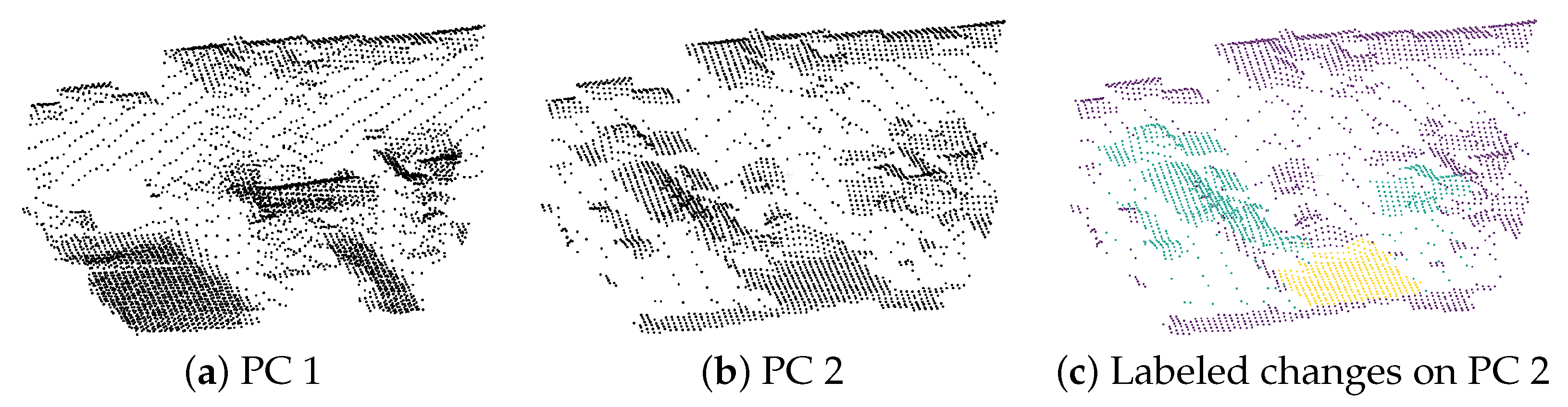
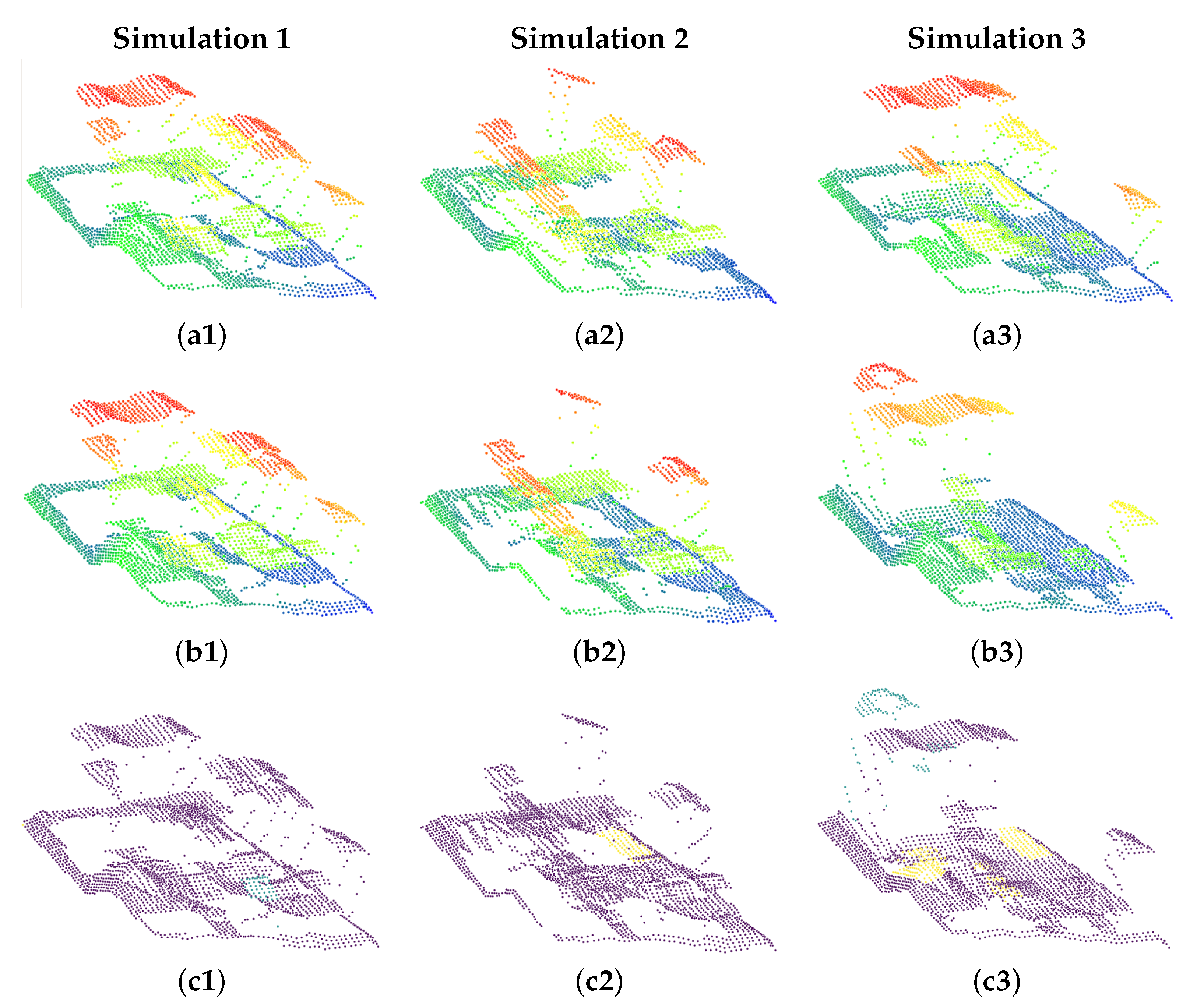
2.1. Simulation of Changes in Urban Point Clouds
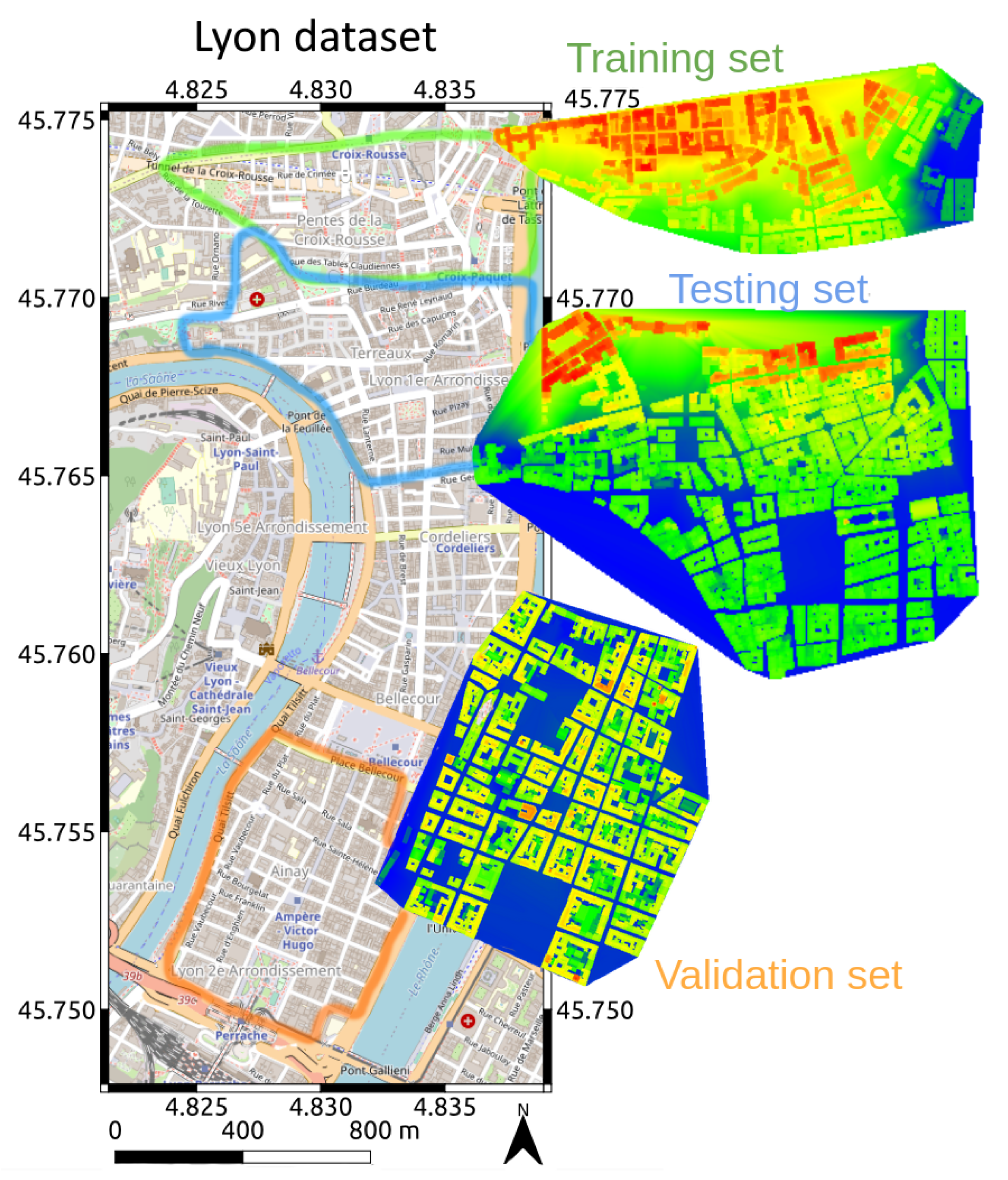
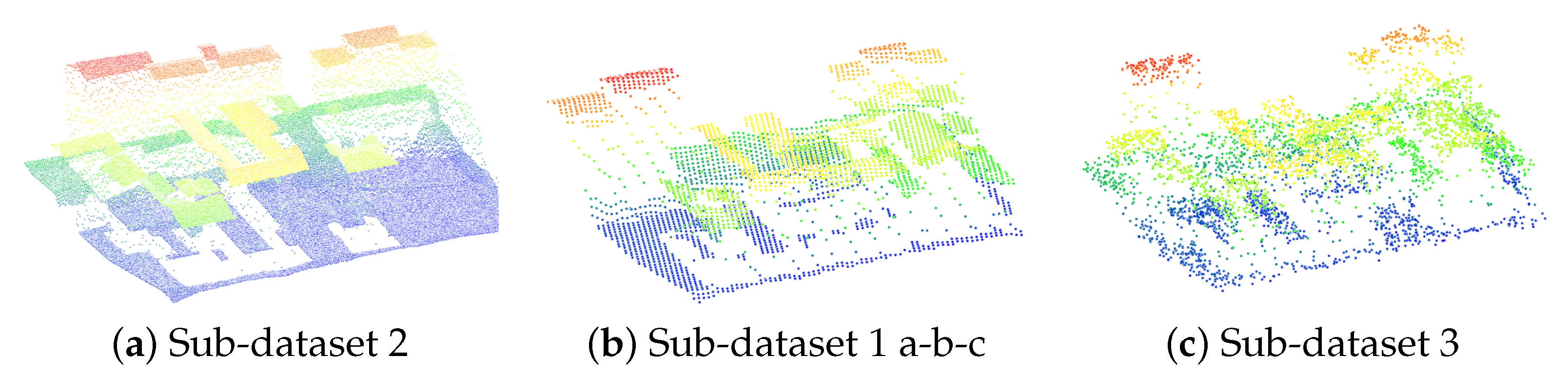
2.2. Evaluation Dataset
- ALS with low resolution, low noise for both dates;
- ALS with high resolution, low noise for both dates;
- ALS with low resolution, high noise for both dates;
- ALS with low resolution, high noise, tight scan angle (mimicking photogrammetric acquisition from satellite images) for both dates;
- Multi-sensor data, with low resolution, high noise at date 1, and high resolution, low noise at date 2.
- (1.a)
- Small training set: 1 simulation;
- (1.b)
- Normal training set: 10 simulations;
- (1.c)
- Large training set: 50 simulations.
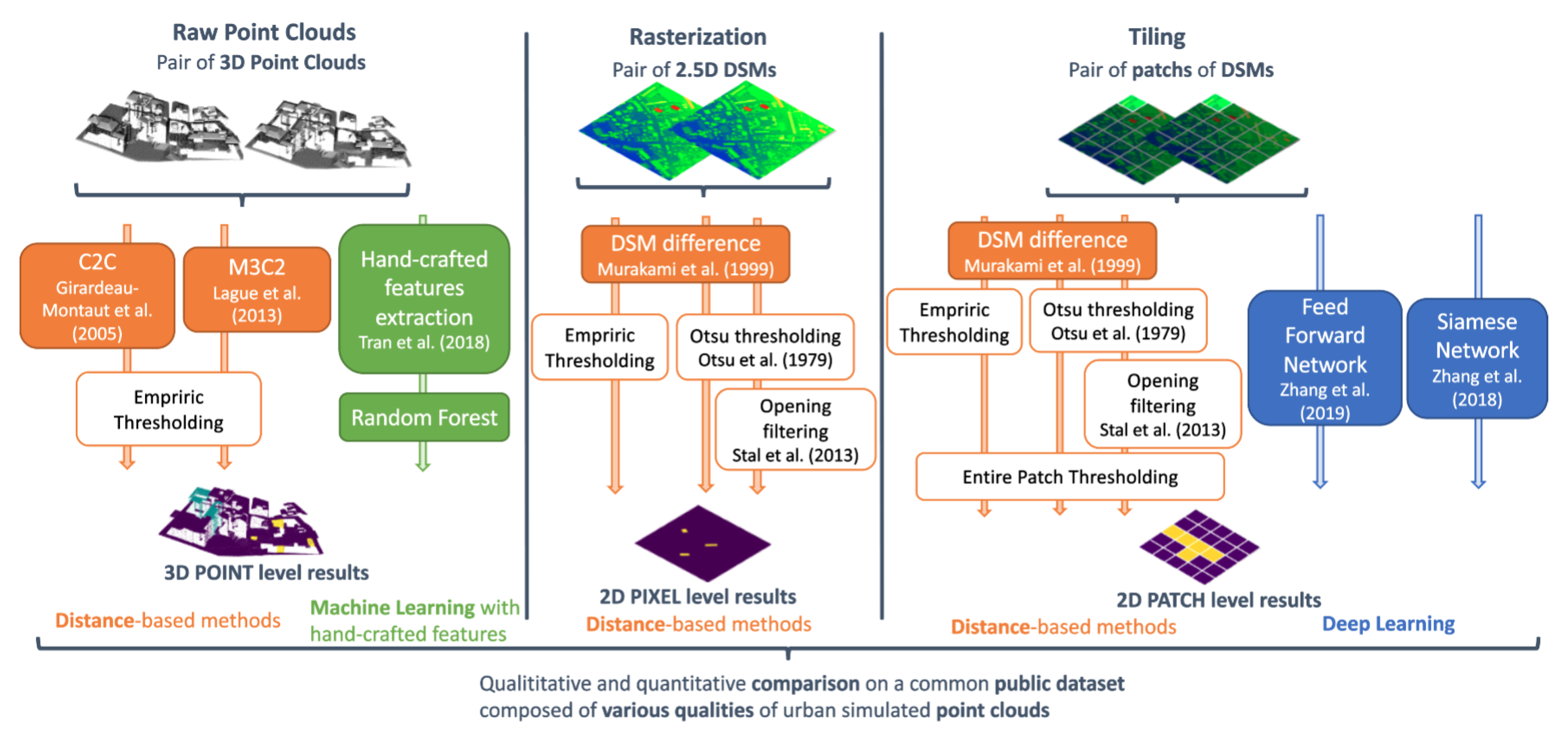
2.3. Experimental Protocol
2.4. Experimental Settings
3. Results
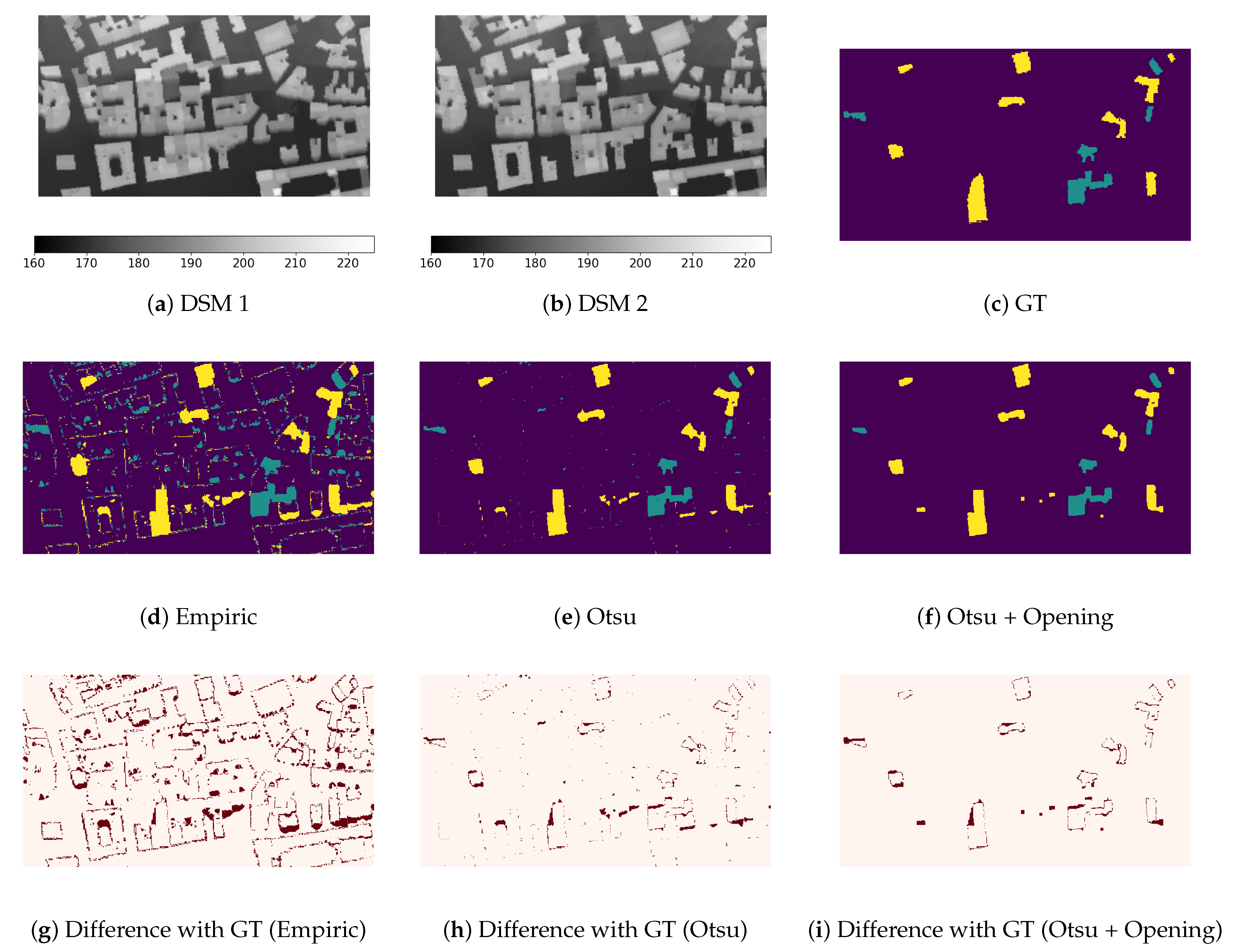
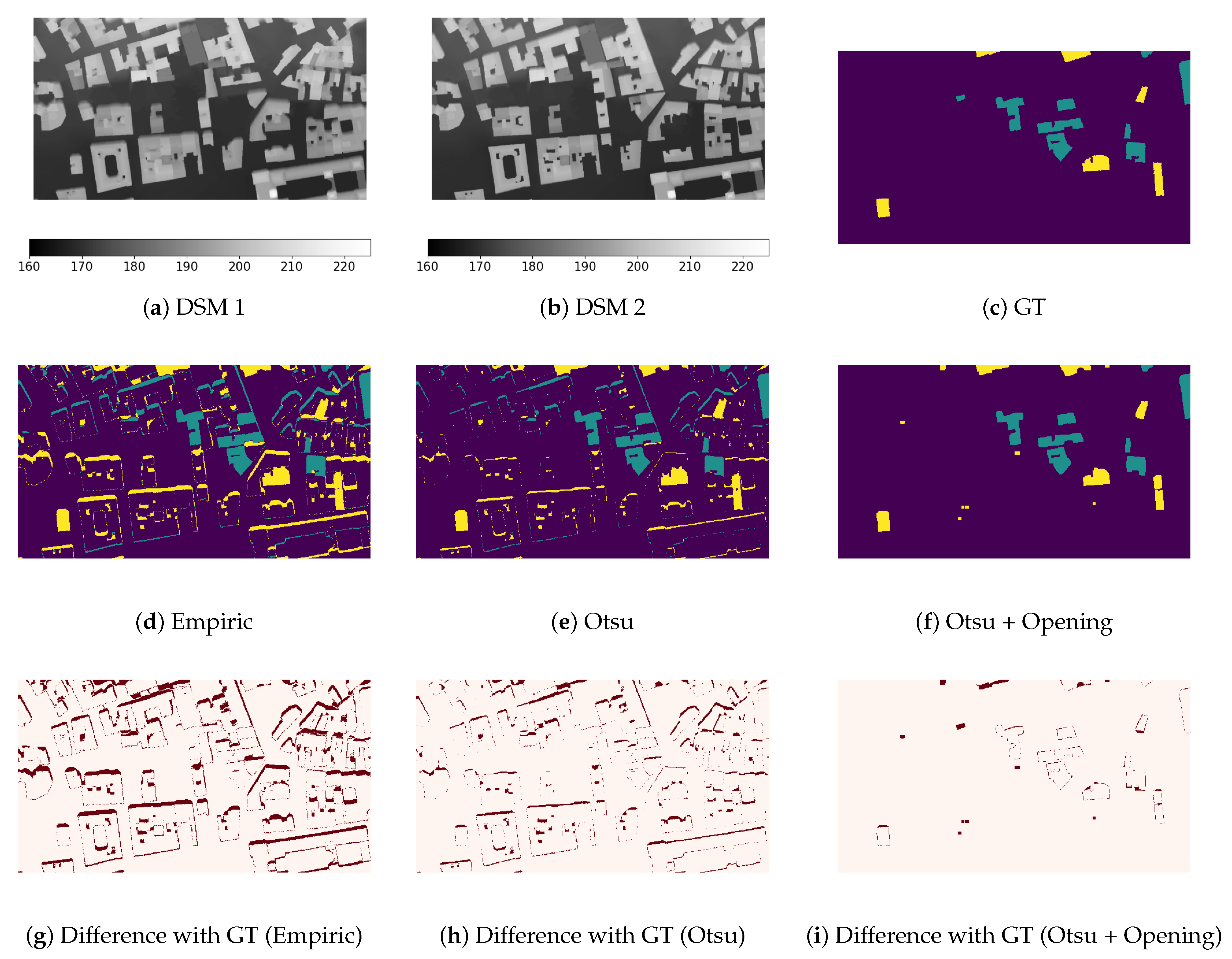
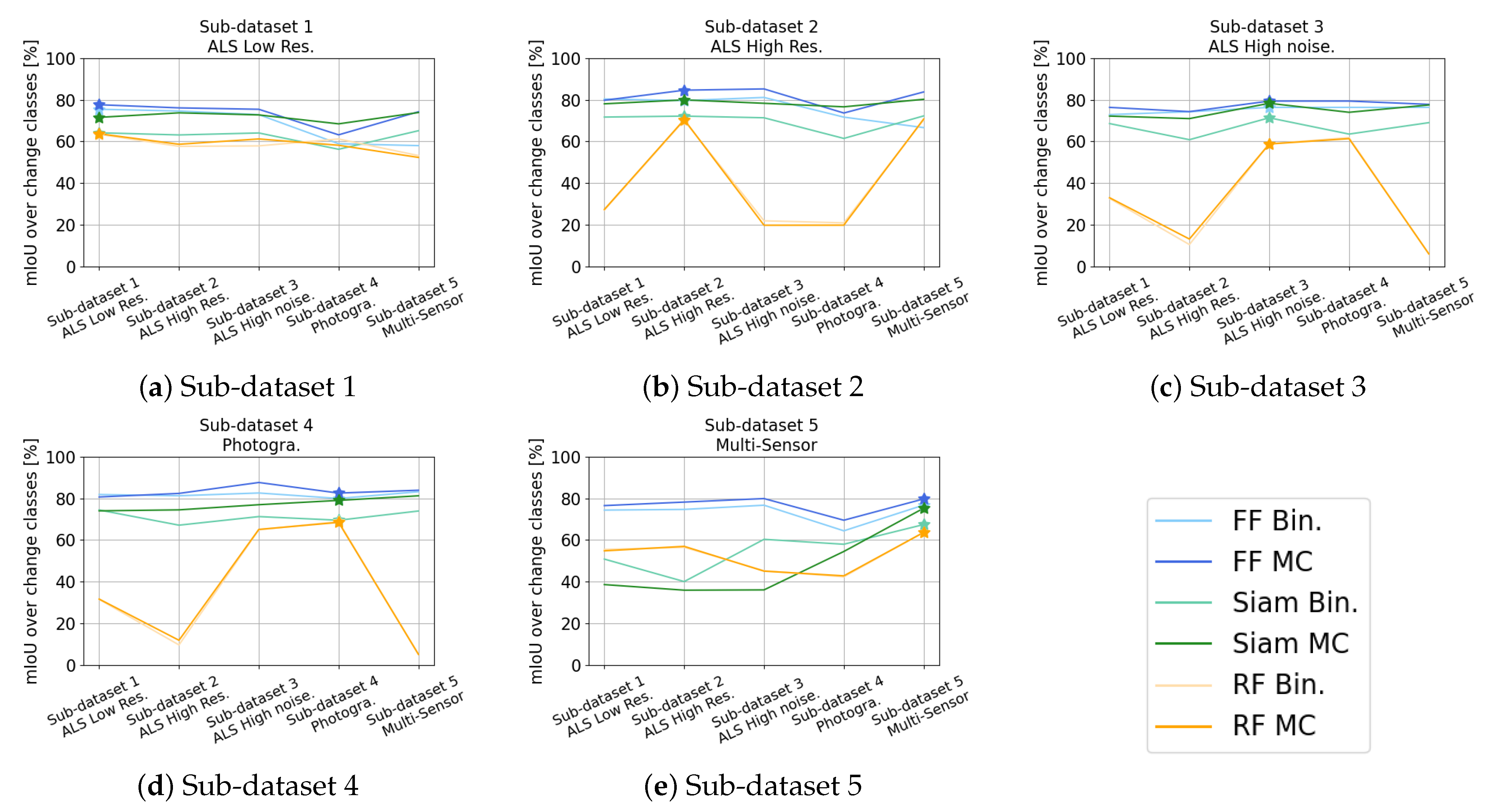
3.1. Experiments on Various PC Acquisition Configurations
3.2. Experiments with Various Training Configurations
4. Discussion
4.1. Methods
4.2. Dataset
4.3. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ALS | Aerial Laser Scanning |
| C2C | Cloud to Cloud |
| CPU | Central Processing Unit |
| CNN | Convolutional Neural Network |
| DSM | Digital Surface Model |
| DSMd | DSM difference |
| DTM | Digital Terrain Model |
| FF | Feed Forward |
| GT | Ground Truth |
| IoU | Intersection over Union |
| LoD2 | Level of Detail 2 |
| LiDAR | Light Detection And Ranging |
| MC | Multi-Class |
| M3C2 | Multi-Scale Model to Model Cloud Comparison |
| PC | Point Cloud |
| RANSAC | Random Sample Consensus |
| RF | Random Forest |
| RGB | Red Green Blue |
| SAR | Synthetic Aperture Radar |
| VTK | Visualisation ToolKit |
| 2D | 2-Dimensional |
| 3D | 3-Dimensional |
References
- Rottensteiner, F. Automated Updating of Building Data Bases from Digital Surface Models and Multi-Spectral Images: Potential and Limitations; ISPRS Congress: Beijing, China, 2008; Volume 37, pp. 265–270. [Google Scholar]
- Champion, N.; Boldo, D.; Pierrot-Deseilligny, M.; Stamon, G. 2D building change detection from high resolution satelliteimagery: A two-step hierarchical method based on 3D invariant primitives. Pattern Recognit. Lett. 2010, 31, 1138–1147. [Google Scholar] [CrossRef]
- Rahman, M.T. Detection of land use/land cover changes and urban sprawl in Al-Khobar, Saudi Arabia: An analysis of multi-temporal remote sensing data. ISPRS Int. J. Geo-Inf. 2016, 5, 15. [Google Scholar] [CrossRef]
- Reynolds, R.; Liang, L.; Li, X.; Dennis, J. Monitoring annual urban changes in a rapidly growing portion of northwest Arkansas with a 20-year Landsat record. Remote Sens. 2017, 9, 71. [Google Scholar] [CrossRef] [Green Version]
- Sofina, N.; Ehlers, M. Building change detection using high resolution remotely sensed data and GIS. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3430–3438. [Google Scholar] [CrossRef]
- Vetrivel, A.; Gerke, M.; Kerle, N.; Nex, F.; Vosselman, G. Disaster damage detection through synergistic use of deep learning and 3D point cloud features derived from very high resolution oblique aerial images, and multiple-kernel-learning. ISPRS J. Photogramm. Remote Sens. 2018, 140, 45–59. [Google Scholar] [CrossRef]
- Si Salah, H.; Ait-Aoudia, S.; Rezgui, A.; Goldin, S.E. Change detection in urban areas from remote sensing data: A multidimensional classification scheme. Int. J. Remote Sens. 2019, 40, 6635–6679. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, M.; Zhang, R.; Chen, S.; Zhan, Z. Change detection based on artificial intelligence: State-of-the-art and challenges. Remote Sens. 2020, 12, 1688. [Google Scholar] [CrossRef]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection—Approaches and applications. P&RS 2016, 122, 41–56. [Google Scholar]
- Amini Amirkolaee, H.; Arefi, H. 3D change detection in urban areas based on DCNN using a single image. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4/W18, 89–95. [Google Scholar] [CrossRef] [Green Version]
- Waser, L.; Baltsavias, E.; Eisenbeiss, H.; Ginzler, C.; Grün, A.; Kuechler, M.; Thee, P. Change detection in mire ecosystems: Assessing changes of forest area using airborne remote sensing data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 313–318. [Google Scholar]
- Guerin, C.; Binet, R.; Pierrot-Deseilligny, M. Automatic detection of elevation changes by differential DSM analysis: Application to urban areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4020–4037. [Google Scholar] [CrossRef]
- Erdogan, M.; Yilmaz, A. Detection of building damage caused by Van Earthquake using image and Digital Surface Model (DSM) difference. Int. J. Remote Sens. 2019, 40, 3772–3786. [Google Scholar] [CrossRef]
- Murakami, H.; Nakagawa, K.; Hasegawa, H.; Shibata, T.; Iwanami, E. Change detection of buildings using an airborne laser scanner. P&RS 1999, 54, 148–152. [Google Scholar]
- Okyay, U.; Telling, J.; Glennie, C.; Dietrich, W. Airborne lidar change detection: An overview of Earth sciences applications. Earth-Sci. Rev. 2019, 198, 102929. [Google Scholar] [CrossRef]
- Vu, T.T.; Matsuoka, M.; Yamazaki, F. LIDAR-based change detection of buildings in dense urban areas. In Proceedings of the IGARSS 2004, 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 5, pp. 3413–3416. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Gharibbafghi, Z.; Tian, J.; Reinartz, P. Superpixel-Based 3D Building Model Refinement and Change Detection, Using VHR Stereo Satellite Imagery. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Choi, K.; Lee, I.; Kim, S. A feature based approach to automatic change detection from LiDAR data in urban areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 18, 259–264. [Google Scholar]
- Dini, G.; Jacobsen, K.; Rottensteiner, F.; Al Rajhi, M.; Heipke, C. 3D building change detection using high resolution stereo images and a GIS database. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2012, 39, 299–304. [Google Scholar] [CrossRef] [Green Version]
- Stal, C.; Tack, F.; De Maeyer, P.; De Wulf, A.; Goossens, R. Airborne photogrammetry and lidar for DSM extraction and 3D change detection over an urban area–a comparative study. Int. J. Remote Sens. 2013, 34, 1087–1110. [Google Scholar] [CrossRef] [Green Version]
- Teo, T.A.; Shih, T.Y. Lidar-based change detection and change-type determination in urban areas. Int. J. Remote Sens. 2013, 34, 968–981. [Google Scholar] [CrossRef]
- Pang, S.; Hu, X.; Wang, Z.; Lu, Y. Object-based analysis of airborne LiDAR data for building change detection. Remote Sens. 2014, 6, 10733–10749. [Google Scholar] [CrossRef] [Green Version]
- Lyu, X.; Hao, M.; Shi, W. Building Change Detection Using a Shape Context Similarity Model for LiDAR Data. ISPRS Int. J. Geo-Inf. 2020, 9, 678. [Google Scholar] [CrossRef]
- Peng, D.; Zhang, Y. Building change detection by combining Lidar data and ortho image. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 669–676. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Li, P. Extraction of urban building damage using spectral, height and corner information from VHR satellite images and airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2020, 159, 322–336. [Google Scholar] [CrossRef]
- Warth, G.; Braun, A.; Bödinger, C.; Hochschild, V.; Bachofer, F. DSM-based identification of changes in highly dynamic urban agglomerations. Eur. J. Remote Sens. 2019, 52, 322–334. [Google Scholar] [CrossRef] [Green Version]
- Jang, Y.J.; Oh, K.Y.; Lee, K.J.; Oh, J.H. A study on urban change detection using D-DSM from stereo satellite data. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2019, 37, 389–395. [Google Scholar]
- Kalantar, B.; Ueda, N.; Al-Najjar, H.A.; Halin, A.A. Assessment of Convolutional Neural Network Architectures for Earthquake-Induced Building Damage Detection based on Pre-and Post-Event Orthophoto Images. Remote Sens. 2020, 12, 3529. [Google Scholar] [CrossRef]
- Zhan, Y.; Fu, K.; Yan, M.; Sun, X.; Wang, H.; Qiu, X. Change detection based on deep siamese convolutional network for optical aerial images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1845–1849. [Google Scholar] [CrossRef]
- Lefèvre, S.; Tuia, D.; Wegner, J.D.; Produit, T.; Nassar, A.S. Toward seamless multiview scene analysis from satellite to street level. Proc. IEEE 2017, 105, 1884–1899. [Google Scholar] [CrossRef] [Green Version]
- He, H.; Chen, M.; Chen, T.; Li, D. Matching of remote sensing images with complex background variations via Siamese convolutional neural network. Remote Sens. 2018, 10, 355. [Google Scholar] [CrossRef] [Green Version]
- Mou, L.; Schmitt, M.; Wang, Y.; Zhu, X.X. A CNN for the identification of corresponding patches in SAR and optical imagery of urban scenes. In Proceedings of the 2017 Joint Urban Remote Sensing Event (JURSE), Dubai, United Arab Emirates, 6–8 March 2017; pp. 1–4. [Google Scholar]
- Zhang, Z.; Vosselman, G.; Gerke, M.; Tuia, D.; Yang, M.Y. Change detection between multimodal remote sensing data using siamese CNN. arXiv 2018, arXiv:1807.09562. [Google Scholar]
- Zhang, Z.; Vosselman, G.; Gerke, M.; Persello, C.; Tuia, D.; Yang, M. Detecting building changes between airborne laser scanning and photogrammetric data. Remote Sens. 2019, 11, 2417. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on points cloud data acquired with a ground laser scanner. ISPRS Arch. 2005, 36, 30–35. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). P&RS 2013, 82, 10–26. [Google Scholar]
- Shirowzhan, S.; Sepasgozar, S.; Li, H.; Trinder, J.; Tang, P. Comparative analysis of machine learning and point-based algorithms for detecting 3D changes in buildings over time using bi-temporal lidar data. Autom. Constr. 2019, 105, 102841. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Fraser, C.; Lu, G. Building change detection from LiDAR point cloud data based on connected component analysis. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 393. [Google Scholar] [CrossRef] [Green Version]
- Siddiqui, F.U.; Awrangjeb, M. A novel building change detection method using 3d building models. In Proceedings of the 2017 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Sydney, Australia, 29 November–1 December 2017; pp. 1–8. [Google Scholar]
- Xu, S.; Vosselman, G.; Oude Elberink, S. Detection and classification of changes in buildings from airborne laser scanning data. Remote Sens. 2015, 7, 17051–17076. [Google Scholar] [CrossRef] [Green Version]
- Dai, C.; Zhang, Z.; Lin, D. An Object-Based Bidirectional Method for Integrated Building Extraction and Change Detection between Multimodal Point Clouds. Remote Sens. 2020, 12, 1680. [Google Scholar] [CrossRef]
- Roynard, X.; Deschaud, J.E.; Goulette, F. Fast and robust segmentation and classification for change detection in urban point clouds. ISPRS Arch. 2016, XLI-B3, 693–699. [Google Scholar]
- Xu, H.; Cheng, L.; Li, M.; Chen, Y.; Zhong, L. Using octrees to detect changes to buildings and trees in the urban environment from airborne LiDAR data. Remote Sens. 2015, 7, 9682–9704. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.; Ressl, C.; Pfeifer, N. Integrated change detection and classification in urban areas based on airborne laser scanning point clouds. Sensors 2018, 18, 448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- de Gélis, I.; Lefèvre, S.; Corpetti, T.; Ristorcelli, T.; Thénoz, C.; Lassalle, P. Benchmarking change detection in urban 3D point clouds. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Girardeau-Montaut, D. CloudCompare. 2016. Available online: https://www.danielgm.net/cc/ (accessed on 2 July 2021).
- Touati, R.; Mignotte, M.; Dahmane, M. Partly Uncoupled Siamese Model for Change Detection from Heterogeneous Remote Sensing Imagery. J. Remote Sens. GIS 2020, 9. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef] [Green Version]
- Czerniawski, T.; Ma, J.W.; Leite, F. Automated building change detection with amodal completion of point clouds. Autom. Constr. 2021, 124, 103568. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Datasets | |||||||
|---|---|---|---|---|---|---|---|
| Parameters | 1 | 2 | 3 | 4 | 5 | ||
| a | b | c | |||||
| Amount of training pairs | 1 | 10 | 50 | 10 | 10 | 10 | 10 |
| Resolution (points/m) | 0.5 | 10 | 0.5 | 0.5 | 0.5/10 | ||
| Noise range across track | 0.01 | 0.01 | 0.2 | 0.2 | 0.2/0.01 | ||
| Noise range along track | 0 | 0 | 0.2 | 0.2 | 0.2/0 | ||
| Noise scan direction (m) | 0.05 | 0.05 | 1 | 1 | 1/0.05 | ||
| Scan angle | 20 to 20 | 20 to 20 | 20 to 20 | −10 to 10 | 20 to 20 | ||
| Overlapping (%) | 10 | 10 | 10 | 5 | 10 | ||
| Height of flight (m) | 700 | 700 | 700 | 700 | 700 | ||
| Method | Sub-Datasets | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||||||
| ALS Low Res. | ALS High Res. | ALS High Noise | Photogrammetry | Multi-Sensor | |||||||
| Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | ||
| DSMd + Empiric thresholding | [15] | 37.11 | 36.89 | 50.93 | 50.72 | 30.34 | 29.97 | 30.85 | 30.73 | 33.65 | 33.16 |
| DSMd + Otsu | [15,18] | 59.36 | 59.14 | 67.08 | 66.96 | 53.15 | 52.67 | 54.81 | 54.77 | 53.15 | 52.61 |
| DSMd + Otsu + Opening | [15,18,22] | 72.21 | 71.92 | 79.28 | 79.09 | 70.67 | 70.34 | 76.92 | 76.89 | 71.89 | 70.99 |
| Method | Sub-Datasets | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||||||
| ALS Low Res. | ALS High Res. | ALS High Noise | Photogrammetry | Multi-Sensor | |||||||
| Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | ||
| DSMd + Empiric thresholding | [15] | 36.13 | 34.59 | 50.06 | 48.78 | 30.93 | 29.90 | 31.11 | 30.76 | 32.79 | 31.86 |
| DSMd + Otsu | [15,18] | 62.44 | 60.40 | 76.82 | 75.23 | 58.46 | 56.59 | 72.04 | 71.00 | 56.60 | 55.02 |
| DSMd + Otsu + Opening | [15,18,22] | 82.27 | 80.22 | 88.39 | 86.62 | 83.47 | 80.71 | 88.51 | 86.83 | 82.22 | 79.59 |
| FF Network | [36] | 77.64 | 75.47 | 84.63 | 79.66 | 79.4 | 76.37 | 82.54 | 79.95 | 79.73 | 76.77 |
| Siamese Network | [35] | 71.58 | 64.16 | 79.97 | 72.18 | 78.33 | 71.36 | 79.03 | 69.5 | 75.27 | 67.41 |
| Method | Sub-Datasets | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||||||
| ALS Low Res. | ALS High Res. | ALS High Noise | Photogrammetry | Multi-Sensor | |||||||
| Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | Bin. | MC | ||
| C2C | [37] | 49.59 | - | 61.65 | - | 49.22 | - | 54.75 | - | 49.76 | - |
| M3C2 | [38] | 33.5 | 29.87 | 59.85 | 53.73 | 41.37 | 38.72 | 36.60 | 35.01 | 40.61 | 37.78 |
| RF (with stability feat.) | [46] | 63.70 | 63.41 | 70.48 | 70.12 | 58.78 | 58.83 | 68.46 | 68.87 | 63.65 | 63.64 |
| Sub-Datasets | Method at 3D Point Level | Methods at 2D Patch Level | ||||||
|---|---|---|---|---|---|---|---|---|
| RF (with Stability Feat.) [46] | FF [36] | Siamese [35] | ||||||
| Bin. | MC | Bin. | MC | Bin. | MC | |||
| 1 | ALS Low Res. | a | 61.51 | 61.34 | 57.52 | 58.43 | 58.62 | 55.07 |
| b | 63.70 | 63.41 | 77.64 | 75.47 | 71.58 | 64.16 | ||
| c | 67.28 | 67.10 | 81.98 | 77.28 | 78.85 | 66.58 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Gélis, I.; Lefèvre, S.; Corpetti, T. Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets. Remote Sens. 2021, 13, 2629. https://doi.org/10.3390/rs13132629
de Gélis I, Lefèvre S, Corpetti T. Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets. Remote Sensing. 2021; 13(13):2629. https://doi.org/10.3390/rs13132629
Chicago/Turabian Stylede Gélis, Iris, Sébastien Lefèvre, and Thomas Corpetti. 2021. "Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets" Remote Sensing 13, no. 13: 2629. https://doi.org/10.3390/rs13132629
APA Stylede Gélis, I., Lefèvre, S., & Corpetti, T. (2021). Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets. Remote Sensing, 13(13), 2629. https://doi.org/10.3390/rs13132629