
Novel 3D Imaging Systems for High-Throughput Phenotyping of Plants

 ,
,
Abstract
1. Introduction
2. Materials and Methods
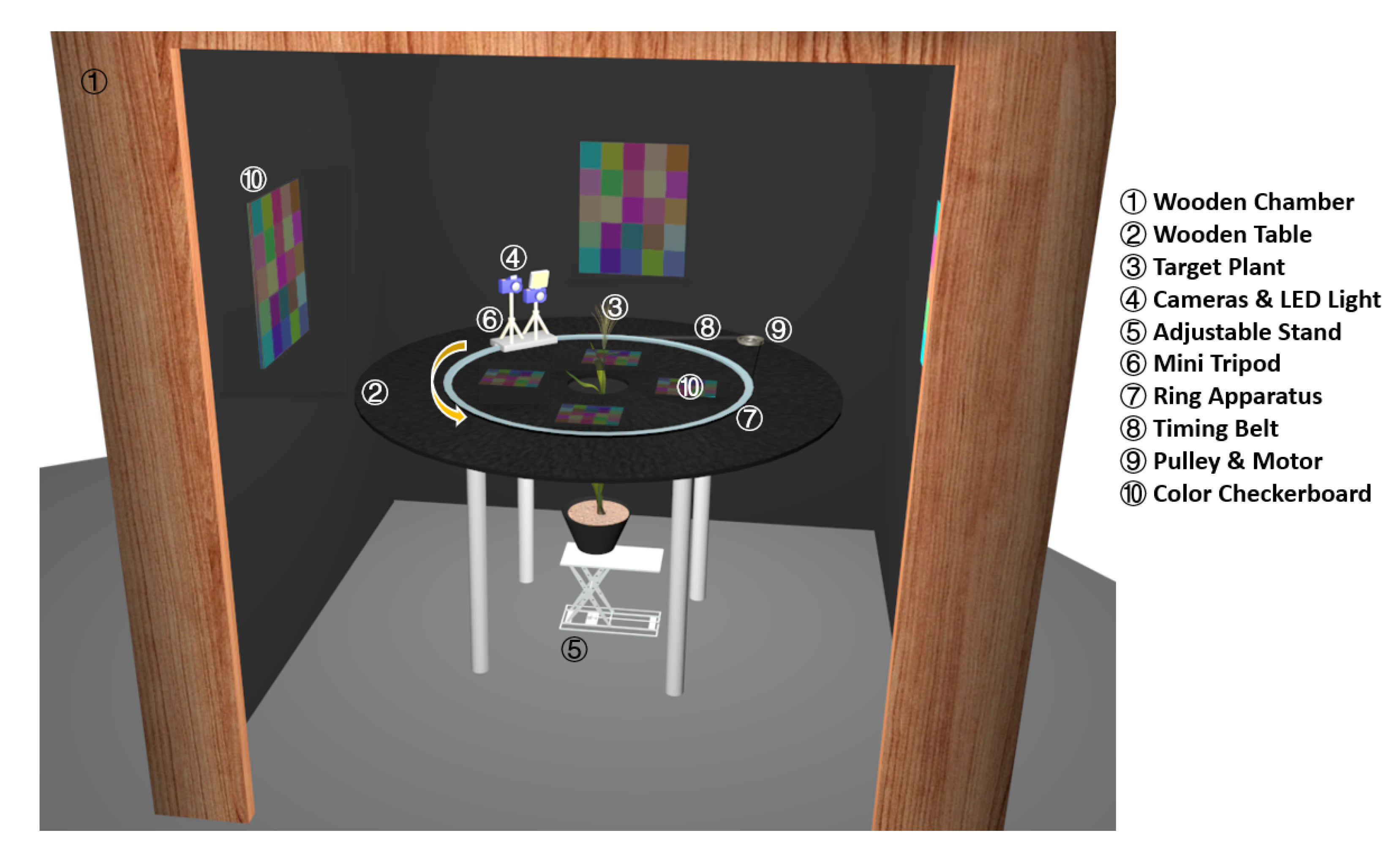
2.1. Setting and Materials
2.1.1. Camera Setting
2.1.2. Color Checkerboards
2.1.3. Black Backdrops and Black Paint
2.2. Imaging Systems
2.2.1. Our Imaging System for Whole Plants
2.2.2. Our Imaging System for Targeted Plant Organs
2.2.3. Turntable-Based Imaging System for Whole Plants
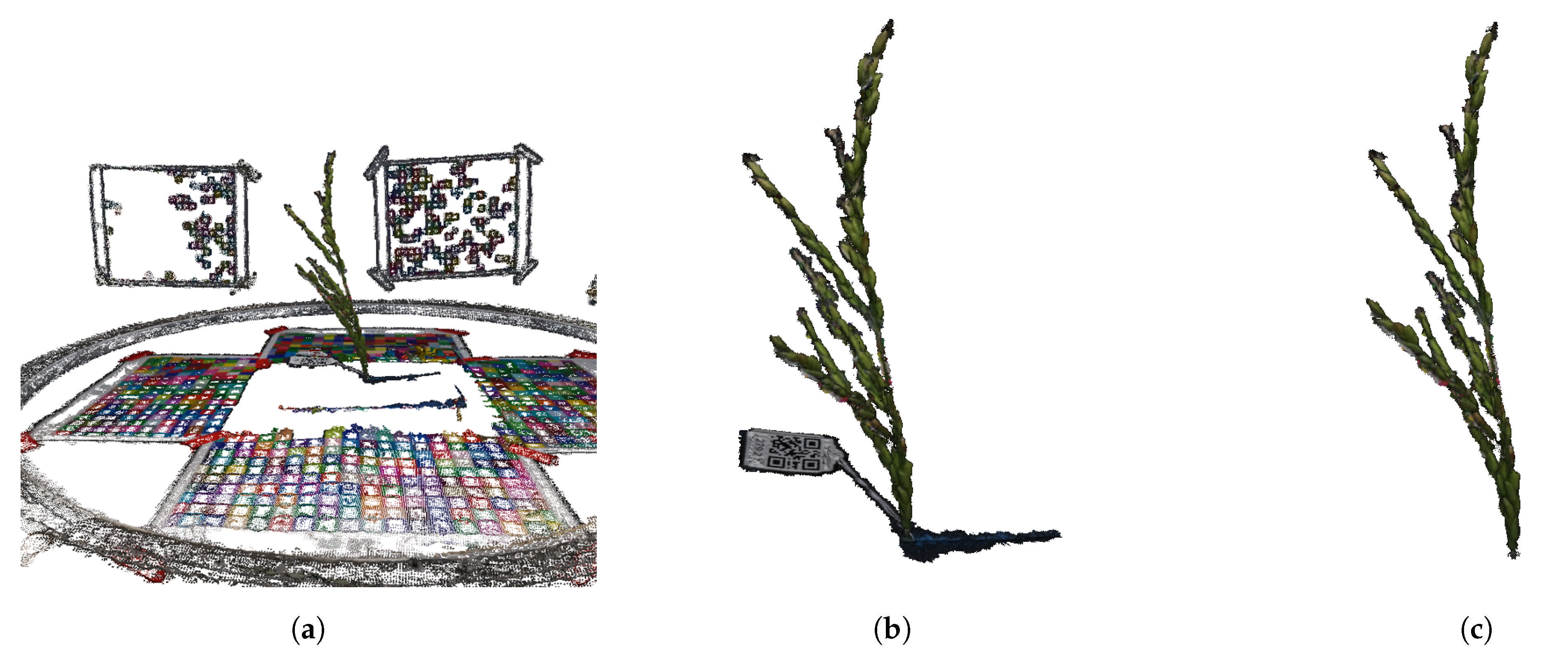
2.3. Point Cloud Reconstruction
2.3.1. Image Preprocessing
2.3.2. 3D Reconstruction
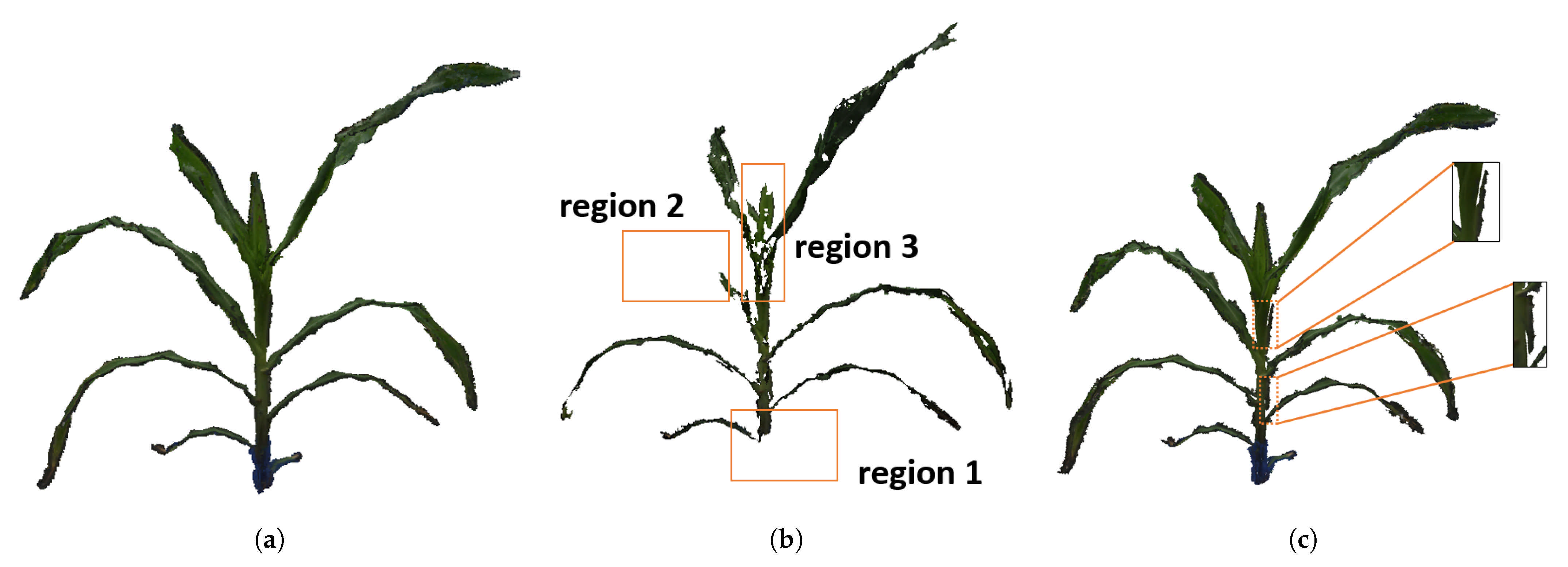
2.3.3. Point Cloud Post-processing
3. Results
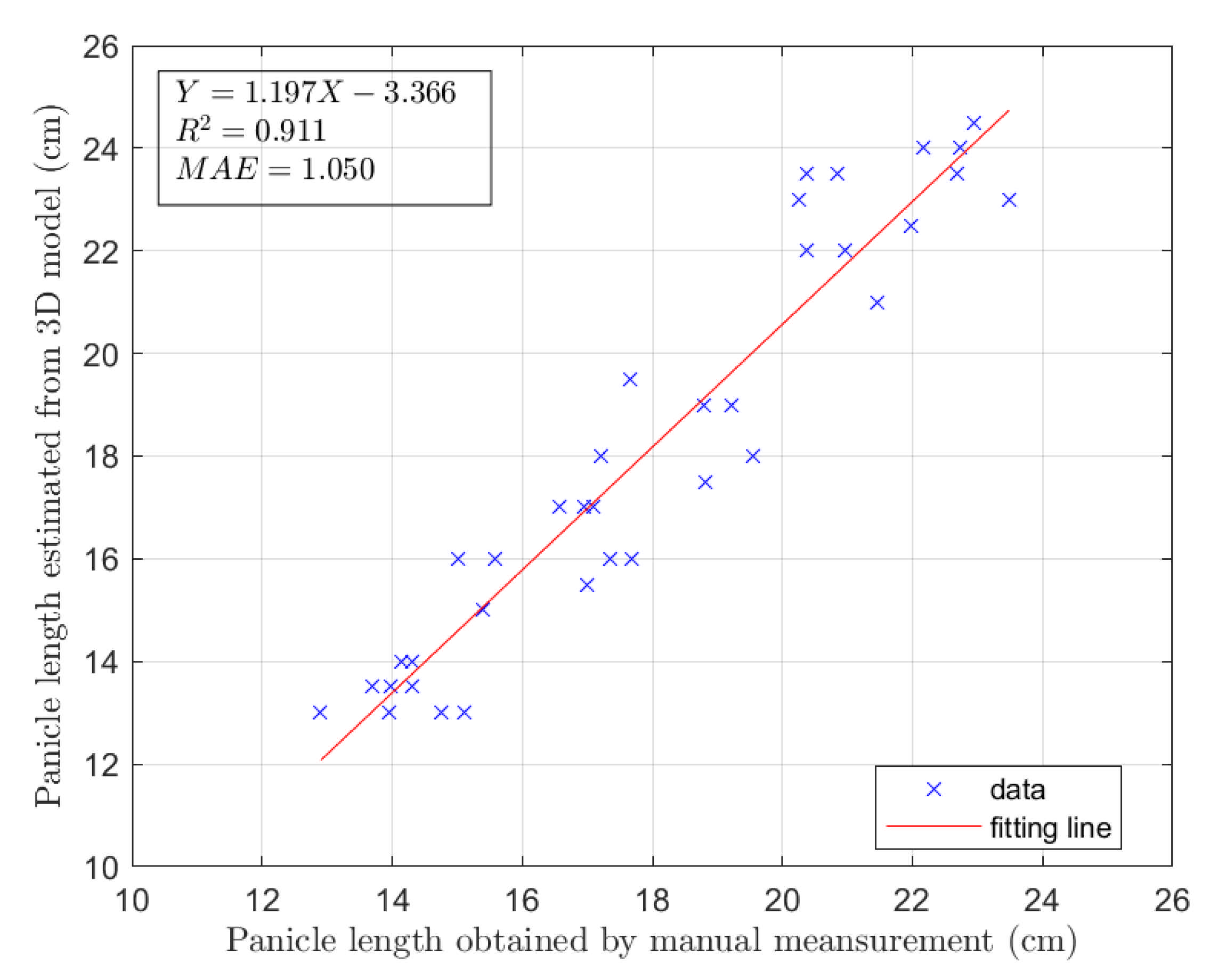
3.1. Results Verification
3.2. Comparison of 3D Models with Various Number of Images and Cameras
3.3. Evaluation of Color Checkerboards
3.3.1. Evaluation with Respect to Image Features
3.3.2. Evaluation with Respect to Models
3.4. Evaluation of Stability
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chew, Y.H.; Smith, R.W.; Jones, H.J.; Seaton, D.D.; Grima, R.; Halliday, K.J. Mathematical models light up plant signaling. Plant Cell 2014, 26, 5–20. [Google Scholar] [CrossRef] [PubMed]
- Furbank, R.T.; Tester, M. Phenomics–technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Srinivasan, S.; Mirnezami, S.V.; Kusmec, A.; Fu, Q.; Attigala, L.; Fernandez, M.G.S.; Ganapathysubramanian, B.; Schnable, P.S. Semiautomated feature extraction from RGB images for sorghum panicle architecture GWAS. Plant Physiol. 2019, 179, 24–37. [Google Scholar] [CrossRef] [PubMed]
- Gage, J.L.; Miller, N.D.; Spalding, E.P.; Kaeppler, S.M.; de Leon, N. TIPS: A system for automated image-based phenotyping of maize tassels. Plant Methods 2017, 13, 21. [Google Scholar] [CrossRef]
- Klukas, C.; Chen, D.; Pape, J.M. Integrated analysis platform: An open-source information system for high-throughput plant phenotyping. Plant Physiol. 2014, 165, 506–518. [Google Scholar] [CrossRef]
- Thapa, S.; Zhu, F.; Walia, H.; Yu, H.; Ge, Y. A novel LiDAR-based instrument for high-throughput, 3D measurement of morphological traits in maize and sorghum. Sensors 2018, 18, 1187. [Google Scholar] [CrossRef]
- Zhu, F.; Thapa, S.; Gao, T.; Ge, Y.; Walia, H.; Yu, H. 3D Reconstruction of Plant Leaves for High-Throughput Phenotyping. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 4285–4293. [Google Scholar]
- Gibbs, J.A.; Pound, M.; French, A.P.; Wells, D.M.; Murchie, E.; Pridmore, T. Approaches to three-dimensional reconstruction of plant shoot topology and geometry. Funct. Plant Biol. 2017, 44, 62–75. [Google Scholar] [CrossRef]
- Fuhrmann, S.; Langguth, F.; Moehrle, N.; Waechter, M.; Goesele, M. MVE-An image-based reconstruction environment. Comput. Graph. 2015, 53, 44–53. [Google Scholar] [CrossRef]
- Sandhu, J.; Zhu, F.; Paul, P.; Gao, T.; Dhatt, B.K.; Ge, Y.; Staswick, P.; Yu, H.; Walia, H. PI-Plat: A high-resolution image-based 3D reconstruction method to estimate growth dynamics of rice inflorescence traits. Plant Methods 2019, 15, 162. [Google Scholar] [CrossRef]
- Gao, T.; Sun, J.; Zhu, F.; Doku, H.A.; Pan, Y.; Walia, H.; Yu, H. Plant Event Detection from Time-Varying Point Clouds. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3321–3329. [Google Scholar]
- McCormick, R.F.; Truong, S.K.; Mullet, J.E. 3D sorghum reconstructions from depth images identify QTL regulating shoot architecture. Plant Physiol. 2016, 172, 823–834. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S.O. Accuracy and resolution of Kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef]
- Cao, W.; Zhou, J.; Yuan, Y.; Ye, H.; Nguyen, H.T.; Chen, J.; Zhou, J. Quantifying Variation in Soybean Due to Flood Using a Low-Cost 3D Imaging System. Sensors 2019, 19, 2682. [Google Scholar] [CrossRef]
- He, J.Q.; Harrison, R.J.; Li, B. A novel 3D imaging system for strawberry phenotyping. Plant Methods 2017, 13, 93. [Google Scholar] [CrossRef]
- Chaudhury, A.; Barron, J.L. Machine vision system for 3D plant phenotyping. IEEE/ACM Trans. Comput. Biol. Bioinform. 2018, 16, 2009–2022. [Google Scholar] [CrossRef]
- Nguyen, T.; Slaughter, D.; Max, N.; Maloof, J.; Sinha, N. Structured light-based 3D reconstruction system for plants. Sensors 2015, 15, 18587–18612. [Google Scholar] [CrossRef]
- Wu, S.; Wen, W.; Xiao, B.; Guo, X.; Du, J.; Wang, C.; Wang, Y. An accurate skeleton extraction approach from 3D point clouds of maize plants. Front. Plant Sci. 2019, 10. [Google Scholar] [CrossRef]
- Zhang, Y.; Teng, P.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimating 3D leaf and stem shape of nursery paprika plants by a novel multi-camera photography system. Sensors 2016, 16, 874. [Google Scholar] [CrossRef]
- Sony.com. Time-lapse (PlayMemories Camera App)|Sony USA. 2020. Available online: https://www.sony.com/electronics/support/articles/00021763 (accessed on 24 July 2012).
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Fuhrmann, S.; Goesele, M. Floating scale surface reconstruction. ACM Trans. Graph. (ToG) 2014, 33, 1–11. [Google Scholar] [CrossRef]
- Andrade, G.; Ramos, G.; Madeira, D.; Sachetto, R.; Ferreira, R.; Rocha, L. G-DBSCAN: A GPU accelerated algorithm for density-based clustering. Procedia Comput. Sci. 2013, 18, 369–378. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Hunt, E.R., Jr.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 103–112. [Google Scholar] [CrossRef]
- Wijayanto, A.W.; Triscowati, D.W.; Marsuhandi, A.H. Maize field area detection in East Java, Indonesia: An integrated multispectral remote sensing and machine learning approach. In Proceedings of the 2020 12th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 6–8 October 2020; pp. 168–173. [Google Scholar]
- Eng, L.S.; Ismail, R.; Hashim, W.; Baharum, A. The use of VARI, GLI, And VIgreen formulas in detecting vegetation in aerial images. Int. J. Technol. 2019, 10, 1385–1394. [Google Scholar] [CrossRef]
- De Souza, E.G.; Scharf, P.C.; Sudduth, K.A. Sun position and cloud effects on reflectance and vegetation indices of corn. Agron. J. 2010, 102, 734–744. [Google Scholar] [CrossRef]
- Andrade, R.G.; Hott, M.C.; Magalhães Junior, W.C.P.d.; D’Oliveira, P.S. Monitoring of Corn Growth Stages by UAV Platform Sensors. Int. J. Adv. Eng. Res. Sci. 2019, 6, 54–58. [Google Scholar] [CrossRef]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. Meshlab: An open-source mesh processing tool. In Proceedings of the Eurographics Italian Chapter Conference, Salerno, Italy, 2–4 July 2008; Volume 2008, pp. 129–136. [Google Scholar]
- Callieri, M.; Ranzuglia, G.; Dellepiane, M.; Cignoni, P.; Scopigno, R. Meshlab as a complete open tool for the integration of photos and colour with high-resolution 3D geometry data. In Proceedings of the CAA2012 40th Conference in Computer Applications and Quantitative Methods in Archaeology, Southampton, UK, 26–30 March 2012; Volume II, pp. 406–416. [Google Scholar]
- Lehtola, V.V.; Kaartinen, H.; Nüchter, A.; Kaijaluoto, R.; Kukko, A.; Litkey, P.; Honkavaara, E.; Rosnell, T.; Vaaja, M.T.; Virtanen, J.P.; et al. Comparison of the selected state-of-the-art 3D indoor scanning and point cloud generation methods. Remote Sens. 2017, 9, 796. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| #Images (by Cam. 1) | #Images (by Cam. 2) | #Images in Total | Success in 3D Model Generation | #Point in Generated 3D Model | Time Cost (sec.) |
|---|---|---|---|---|---|
| 15 | 0 | 15 | No | N/A | N/A |
| 10 | 10 | 20 | No | N/A | N/A |
| 15 | 15 | 30 | No | N/A | N/A |
| 30 | 0 | 30 | Yes | 45,881 | 391 |
| 30 | 30 | 60 | Yes | 98,101 | 1171 |
| 60 | 0 | 60 | Yes | 96,766 | 1300 |
| 60 | 60 | 120 | Yes | 129,657 | 2758 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, T.; Zhu, F.; Paul, P.; Sandhu, J.; Doku, H.A.; Sun, J.; Pan, Y.; Staswick, P.; Walia, H.; Yu, H. Novel 3D Imaging Systems for High-Throughput Phenotyping of Plants. Remote Sens. 2021, 13, 2113. https://doi.org/10.3390/rs13112113
Gao T, Zhu F, Paul P, Sandhu J, Doku HA, Sun J, Pan Y, Staswick P, Walia H, Yu H. Novel 3D Imaging Systems for High-Throughput Phenotyping of Plants. Remote Sensing. 2021; 13(11):2113. https://doi.org/10.3390/rs13112113
Chicago/Turabian StyleGao, Tian, Feiyu Zhu, Puneet Paul, Jaspreet Sandhu, Henry Akrofi Doku, Jianxin Sun, Yu Pan, Paul Staswick, Harkamal Walia, and Hongfeng Yu. 2021. "Novel 3D Imaging Systems for High-Throughput Phenotyping of Plants" Remote Sensing 13, no. 11: 2113. https://doi.org/10.3390/rs13112113
APA StyleGao, T., Zhu, F., Paul, P., Sandhu, J., Doku, H. A., Sun, J., Pan, Y., Staswick, P., Walia, H., & Yu, H. (2021). Novel 3D Imaging Systems for High-Throughput Phenotyping of Plants. Remote Sensing, 13(11), 2113. https://doi.org/10.3390/rs13112113