
Automatic Identification and Geometrical Modeling of Steel Rivets of Historical Structures from Lidar Data




Abstract

1. Introduction
2. Methodology
2.1. Identification of the Centers of the Rivets
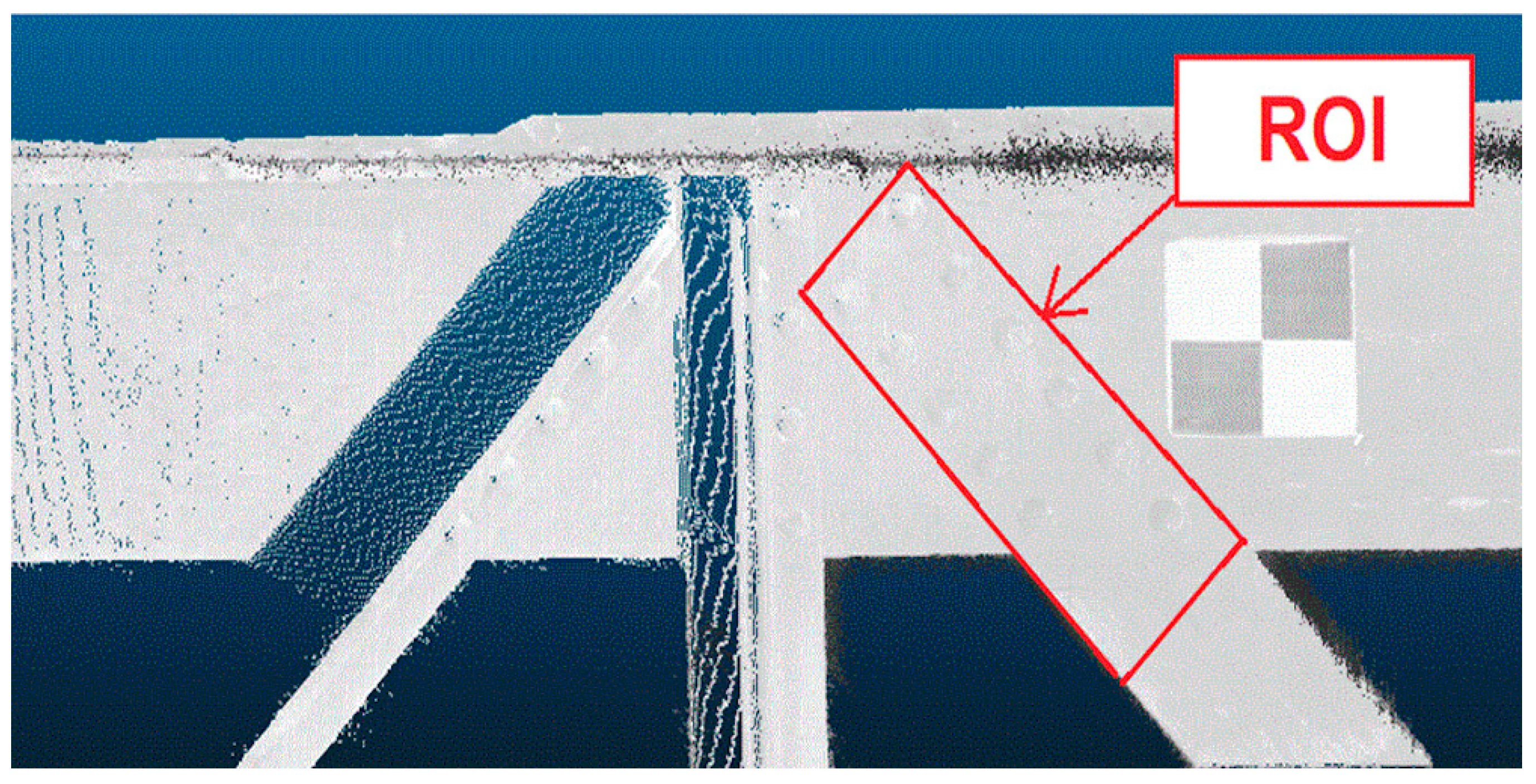
2.1.1. Determination of the Support Plane of the Rivets
2.1.2. Segmentation of the Rivets
2.1.3. Rivet Center Identification
2.1.4. Data File Generation
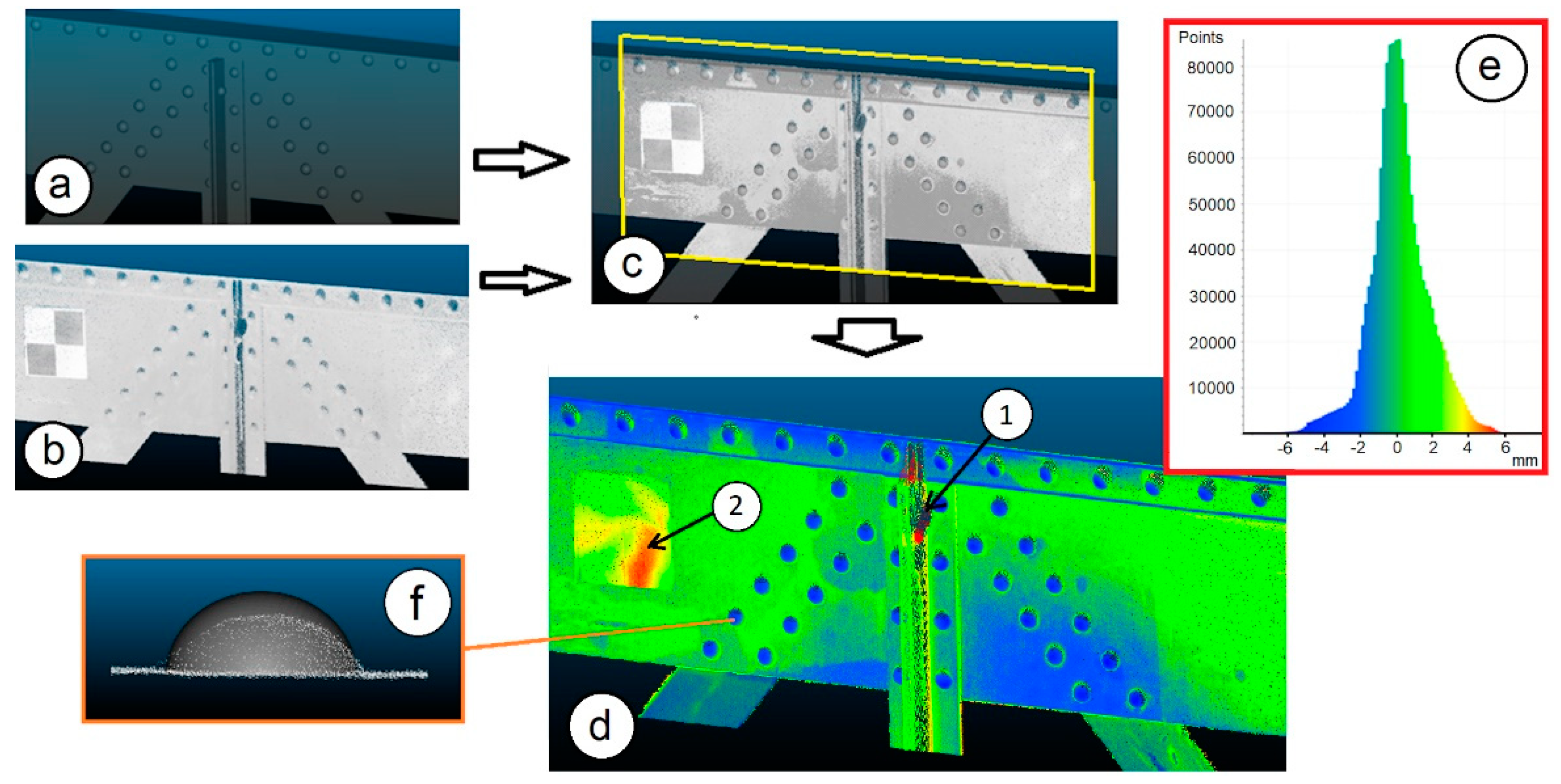
2.2. Three-Dimensional Modeling of the Rivets
- -
- Import the data files containing the Cartesian coordinates of the centers of the rivets.
- -
- Projection of these points on the surface of the corresponding structural profiles.
- -
- Generation of the 3D model of the rivets in each of the projection points. Generally, the modeling of the rivet head is carried out as a hemisphere using the diameter of the rivet, although in reality the rivet is not perfectly hemispherical, but this simplification is accurate enough and takes up little memory space in the final geometrical model. By modeling each rivet in its actual position, a more detailed HBIM model can be obtained, which can be very useful for the structural safety assessment and health monitoring over time.
3. Laboratory Testing
3.1. Materials
3.2. Results
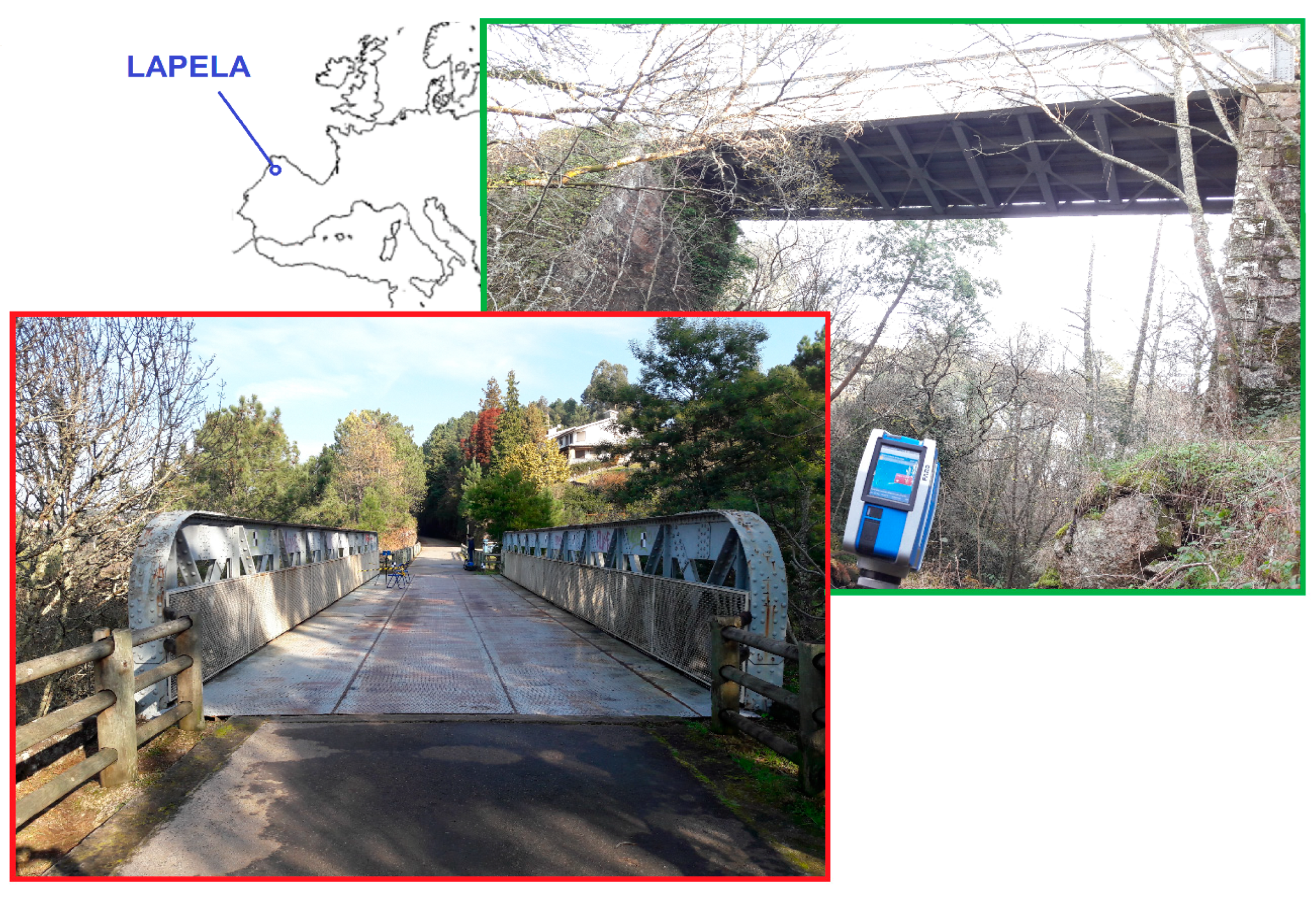
4. Real Case Study
4.1. Description of the Bridge
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- López, F.J.; Lerones, P.M.; Llamas, J.; Gómez-García-Bermejo, J.; Zalama, E. A review of heritage building information modelling (H-BIM). Multimodal Technol. Interact. 2018, 2, 21. [Google Scholar] [CrossRef]
- Pierdicca, R.; Paolanti, M.; Matrone, F.; Martini, M.; Morbidoni, C.; Malinverni, E.S.; Frontoni, E.; Lingua, A.M. Point Cloud Semantic Segmentation Using a Deep Learning Framework for Cultural Heritage. Remote Sens. 2020, 12, 1005. [Google Scholar] [CrossRef]
- Mol, A.; Cabaleiro, M.; Sousa, H.S.; Branco, J.M. HBIM for storing life-cycle data regarding decay and damage in existing timber structures. Autom. Constr. 2020, 117, 103262. [Google Scholar] [CrossRef]
- Andriasyan, M.; Moyano, J.; Nieto-Julián, J.E.; Antón, D. From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage. Remote Sens. 2020, 12, 1094. [Google Scholar] [CrossRef]
- Palomar, I.J.; Valldecabres, J.L.G.; Tzortzopoulos, P.; Pellicer, E. An online platform to unify and synchronise heritage architecture information. Autom. Constr. 2020, 110, 103008. [Google Scholar] [CrossRef]
- Croce, V.; Caroti, G.; De Luca, L.; Jacquot, K.; Piemonte, A.; Véron, P. From the Semantic Point Cloud to Heritage-Building Information Modeling: A Semiautomatic Approach Exploiting Machine Learning. Remote Sens. 2021, 13, 461. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic recognition of common structural elements from point clouds for automated progress monitoring and dimensional quality control in reinforced concrete construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Q.; Dong, Z. Structural 3D Reconstruction of Indoor Space for 5G Signal Simulation with Mobile Laser Scanning Point Clouds. Remote Sens. 2019, 11, 2262. [Google Scholar] [CrossRef]
- Karunathilake, A.; Honma, R.; Niina, Y. Self-Organized Model Fitting Method for Railway Structures Monitoring Using LiDAR Point Cloud. Remote Sens. 2020, 12, 3702. [Google Scholar] [CrossRef]
- Cabaleiro, M.; Riveiro, B.; Arias, P.; Caamano, J.C. Algorithm for beam deformation modeling from LiDAR data. Measurement 2015, 76, 20–31. [Google Scholar] [CrossRef]
- Herraez, J.; Navarro, P.; Denia, J.L.; Martin, M.T.; Rodriguez, J. Modeling the thickness of vaults in the church of Santa Maria de Magdalena (Valencia, Spain) with laser scanning techniques. J. Cult. Herit. 2014, 15, 679–686. [Google Scholar] [CrossRef]
- Cabaleiro, M.; Riveiro, B.; Arias, P.; Caamano, J.C.; Vilan, J.A. Automatic 3D modelling of metal frame connections from LIDAR data for structural engineering purposes. ISPRS J. Photogramm. Remote Sens. 2014, 96, 47–56. [Google Scholar] [CrossRef]
- Yin, X.; Liu, H.; Chen, Y.; Al-Hussein, M. Building information modelling for off-site construction: Review and future directions. Autom. Constr. 2019, 101, 72–91. [Google Scholar] [CrossRef]
- Santos, R.; Costa, A.A.; Silvestre, J.D.; Pyl, L. Informetric analysis and review of literature on the role of BIM in sustainable construction. Autom. Constr. 2019, 103, 221–234. [Google Scholar] [CrossRef]
- Garzia, F.; Costantino, D.; Baiocchi, V. Security and safety management and role of laser scanning in unique and peculiar cultural heritage sites such as the papal basilica and the sacred convent of Saint Francis in Assisi in Italy. Int. J. Herit. Archit. 2018, 2, 271–282. [Google Scholar] [CrossRef]
- Cuartero, J.; Cabaleiro, M.; Sousa, H.S.; Branco, J.M. Tridimensional parametric model for prediction of structural safety of existing timber roofs using laser scanner and drilling resistance tests. Eng. Struct. 2019, 185, 58–67. [Google Scholar] [CrossRef]
- Sanchez-Aparicio, L.J.; Riveiro, B.; Gonzalez-Aguilera, D.; Ramos, L.F. The combination of geomatic approaches and operational modal analysis to improve calibration of finite element models: A case of study in Saint Torcato church (Guimaraes, Portugal). Constr. Build. Mater. 2014, 70, 118–129. [Google Scholar] [CrossRef]
- Yang, L.; Cheng, J.C.; Wang, Q. Semi-automated generation of parametric BIM for steel structures based on terrestrial laser scanning data. Autom. Constr. 2020, 112, 103037. [Google Scholar] [CrossRef]
- Basta, A.; Serror, M.H.; Marzouk, M. A BIM-based framework for quantitative assessment of steel structure deconstructability. Autom. Constr. 2020, 111, 103064. [Google Scholar] [CrossRef]
- Laefer, D.F.; Truong-Hong, L. Toward automatic generation of 3D steel structures for building information modelling. Autom. Constr. 2017, 74, 66–77. [Google Scholar] [CrossRef]
- Donato, V.; Biagini, C.; Bertini, G.; Marsugli, F. Challenges and opportunities for the implementation of h-bim with regards to historical infrastructures: A case study of the ponte giorgini in castiglione della pescaia (grosseto-italy). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42. [Google Scholar] [CrossRef]
- Morganti, R.; Tosone, A.; Di Donato, D.; Abita, M. Hbim and the 20th century steel building heritage–a procedure suitable for the construction history in italy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Xie, Q.; Lu, D.; Du, K.; Xu, J.; Dai, J.; Chen, H.; Wang, J. Aircraft Skin Rivet Detection Based on 3D Point Cloud via Multiple Structures Fitting. Comput. Aided Des. 2020, 120, 102805. [Google Scholar] [CrossRef]
- Ying, C.; Zhou, Y.; Han, D.; Qin, G.; Hu, K.; Guo, J.; Guo, T. Applying BIM and 3D laser scanning technology on virtual pre-assembly for complex steel structure in construction. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Beijing, China, 20–22 September 2019; Volume 371, p. 022036. [Google Scholar] [CrossRef]
- Nurunnabi, A.; Sadahiro, Y.; Laefer, D.F. Robust statistical approaches for circle fitting in laser scanning three-dimensional point cloud data. Pattern Recognit. 2018, 81, 417–431. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Laefer, D.F. A semi-automatic member detection for metal bridges. In Proceedings of the IABSE Conference Nara: Elegance in Structures, Nara, Japan, 13–15 May 2015; Available online: http://hdl.handle.net/10197/7447 (accessed on 24 May 2021).
- Kim, M.K.; Sohn, H.; Chang, C.C. Automated dimensional quality assessment of precast concrete panels using terrestrial laser scanning. Autom. Constr. 2014, 45, 163–177. [Google Scholar] [CrossRef]
- Leng, L.; Zhang, T.; Kleinman, L.; Zhu, W. Ordinary least square regression, orthogonal regression, geometric mean regression and their applications in aerosol science. J. Phys. Conf. Ser. 2007, 78, 012084. [Google Scholar] [CrossRef]
- Shapiro, L.S.; Brady, M. Rejecting outliers and estimating errors in an orthogonal-regression framework. Philos. Trans. R. Soc. Lond. Ser. A Phys. Eng. Sci. 1995, 350, 407–439. [Google Scholar] [CrossRef]
- Maronna, R. Principal components and orthogonal regression based on robust scales. Technometrics 2005, 47, 264–273. [Google Scholar] [CrossRef]
- Cabaleiro, M.; Lindenbergh, R.; Gard, W.F.; Arias, P.; van de Kuilen, J.W.G. Algorithm for automatic detection and analysis of cracks in timber beams from LiDAR data. Constr. Build. Mater. 2017, 130, 41–53. [Google Scholar] [CrossRef]
- España. Ministerio de Obras Públicas y Transportes. Norma básica de la edificación NBE MV-105 1967: Roblones de acero Normativas. España. Ministerio de Obras Públicas y Transportes: 1992. ISBN 8474338042, 9788474338041. Available online: https://www.boe.es/eli/es/rd/1995/11/10/1829 (accessed on 21 March 2021).
- Riveiro, B.; Morer, P.; Arias, P.; De Arteaga, I. Terrestrial laser scanning and limit analysis of masonry arch bridges. Constr. Build. Mater. 2011, 25, 1726–1735. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rivet (N°) | Mean (mm) | Std.dev (mm) | Rivet (N°) | Mean (mm) | Std.dev (mm) | Rivet (N°) | Mean (mm) | Std.dev (mm) | Rivet (N°) | Mean (mm) | Std.dev (mm) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.07 | 0.57 | 12 | −0.09 | 0.42 | 23 | −1.45 | 1.48 | 34 | −1.32 | 1.42 |
| 2 | 0.40 | 0.60 | 13 | −0.25 | 0.52 | 24 | −1.73 | 0.96 | 35 | −1.40 | 0.73 |
| 3 | −0.30 | 0.57 | 14 | −0.34 | 0.55 | 25 | −0.78 | 1.12 | 36 | −1.80 | 0.53 |
| 4 | −0.86 | 0.45 | 15 | 0.36 | 0.58 | 26 | −1.31 | 1.61 | 37 | −0.75 | 0.53 |
| 5 | 0.16 | 0.57 | 16 | −1.31 | 0.85 | 27 | −0.50 | 1.24 | 38 | −1.12 | 0.62 |
| 6 | −0.67 | 0.78 | 17 | −1.65 | 1.16 | 28 | 0.89 | 1.12 | 39 | −0.97 | 0.59 |
| 7 | −0.57 | 0.45 | 18 | −1.03 | 0.87 | 29 | −0.73 | 1.13 | 40 | −1.55 | 0.89 |
| 8 | −1.43 | 0.52 | 19 | −1.18 | 1.35 | 30 | −0.73 | 1.14 | 41 | −1.48 | 0.74 |
| 9 | −1.05 | 0.52 | 20 | −1.78 | 1.13 | 31 | −0.59 | 1.56 | 42 | −1.67 | 0.83 |
| 10 | −0.22 | 0.50 | 21 | −1.59 | 0.87 | 32 | 0.26 | 1.33 | 43 | 1.99 | 1.19 |
| 11 | −0.05 | 0.71 | 22 | −1.91 | 0.89 | 33 | −1.32 | 1.43 | 44 | −1.95 | 1.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, Á.; Cabaleiro, M.; Conde, B.; Sánchez-Rodríguez, A. Automatic Identification and Geometrical Modeling of Steel Rivets of Historical Structures from Lidar Data. Remote Sens. 2021, 13, 2108. https://doi.org/10.3390/rs13112108
Pereira Á, Cabaleiro M, Conde B, Sánchez-Rodríguez A. Automatic Identification and Geometrical Modeling of Steel Rivets of Historical Structures from Lidar Data. Remote Sensing. 2021; 13(11):2108. https://doi.org/10.3390/rs13112108
Chicago/Turabian StylePereira, Álvaro, Manuel Cabaleiro, Borja Conde, and Ana Sánchez-Rodríguez. 2021. "Automatic Identification and Geometrical Modeling of Steel Rivets of Historical Structures from Lidar Data" Remote Sensing 13, no. 11: 2108. https://doi.org/10.3390/rs13112108
APA StylePereira, Á., Cabaleiro, M., Conde, B., & Sánchez-Rodríguez, A. (2021). Automatic Identification and Geometrical Modeling of Steel Rivets of Historical Structures from Lidar Data. Remote Sensing, 13(11), 2108. https://doi.org/10.3390/rs13112108