1. Introduction
Nowadays, real-time orbit determination based on GNSS is successfully used for GEO satellites which traditionally depended on ground-based ranging systems. Because of the advantages of cost-effectiveness and autonomy, the utilization of GNSS receivers in GEO missions has become an attractive alternative for orbit determination and timing. In the 1980s, the concept of using GPS on GEO satellite has been introduced. In 2000, the United States released the operational requirements document (ORD) and presented the first description of space service volume (SSV), which was a shell extending from 3000 km altitude to approximately the GEO altitude, or 36,000 km [
1,
2]. In 2006, Bauer formally described the concept of SSV, and made it clear that SSV coverage characteristic with the GPS constellation [
2]. Recently, considerable effort has been exerted by the United Nations-sponsored International Committee on GNSS (ICG) to expand the GNSS use into the SSV, by conducting initiatives to ensure GNSS signals available in the SSV. ICG is leading to coordinate the development of an interoperable SSV across the navigation service provider, including GPS, BDS, Galileo, GLONASS, etc. [
3,
4]. An analysis of the BDS-3 performance of the main-lobe and the side-lobe signals for three typical SSV missions is conducted based on antenna patterns from the actual mission design data [
5,
6].
However, the use of GNSS signals for SSV users has special challenges. Several researches have carried out studies in signal link budgets and performance for SSV applications. In GEO missions, the altitude of GNSS receiver is higher than that of the navigation satellite constellation and the geometric distribution of the navigation satellite is poor. Most of the signals from the main lobe of the GNSS transmitting antenna are blocked by the earth [
7,
8,
9]. It is necessary to receive the side lobe signals to increase the number of available navigation satellites and improve the geometric distribution [
9]. Because the power of side-lobe signals are generally about 20 dB lower than that of the main-lobe ones, we need to improve sensitivity of the receiver to process these signals [
10,
11,
12]. In spite of these difficulties, several feasibility studies for orbit determination with GNSS in GEO missions have been presented. A software simulation was made to assess the performance of autonomous orbit determination using GPS and Galileo signals. The accuracy of GEO orbit determination in this simulation was less than 100 m [
13]. An iterative Kalman filter based on nonlinear dynamic model was used with GPS measurements for GEO spacecraft navigation. The tests of this filter were conducted with a GPS signal simulator and a dual-star single-frequency receiver [
14]. Comprehensive simulation results and analysis show that using GPS and Galileo navigation for GEO orbits has operational benefits, even current space borne state-of-the-art receivers are considered [
15]. A system-level performance and qualification test for GEO missions has been conducted using a space borne GPS receiver, named General Dynamics’ Viceroy-4. It has demonstrated the ability to provide 100% position, velocity, and time data by acquiring and tracking a significant number of side lobe signals [
11]. GNSS signal characteristics in GEO, taking into consideration the L1 and L5 frequency bands and the GPS and Galileo constellations, are specifically investigated. Simulation tests and experiments using a high sensitivity commercial off-the-shelf (COTS) receiver were presented to validate the navigation performance [
16].
Moreover, several missions have demonstrated the flight performance of GNSS signal processing and onboard orbit determination in GEO orbit. In Europe, Galileo navigation satellite GIOVE-A with a SGR-GEO receiver and an experimental results show that weak side lobe signals have been acquired and tracked by this receiver to increase the number of available satellites in medium-earth-orbit (MEO) and GEO. The position accuracy in this experiment was less than 100 m [
17,
18]. The Geostationary Operational Environmental Satellite-R (GOES-R) adopts Viceroy-4 as an onboard GPS receiver to provide orbit determination data for guidance, navigation, and control systems [
19]. According to on-orbit performance, the position accuracy is less than 15.2 m and the velocity accuracy is less than 0.52 cm/s [
20]. In Europe, a receiver Mosaic GNSS has been adopted in SmallGEO platform used in the Hispasat 36W-1 mission. The flight results show that signals with C/N
0 at 27dB-Hz–28 dB-Hz are received and the RMS of position error is around 120 m [
21]. In a GEO mission of TJS-2, the onboard receiver can track 6–8 GPS satellites and the minimum C/N
0 of signals tracked was 24 dB-Hz. The RMS of position error between 30 h orbit determination arcs is 2.14 m using the overlap comparisons assessment [
22]. Furthermore, several publications have addressed the feasibility of GNSS-based navigation for lunar missions. Navigation results obtained with a realistic simulator were presented by the past studies to demonstrate the feasibility of lunar orbit spacecraft applications that rely on GNSS receivers [
23,
24].
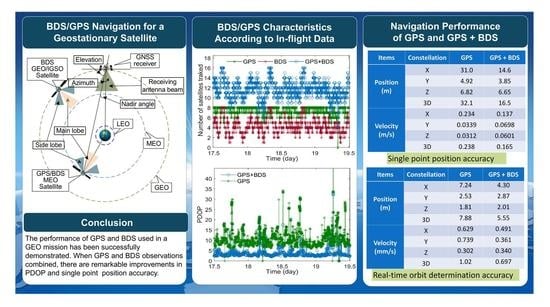
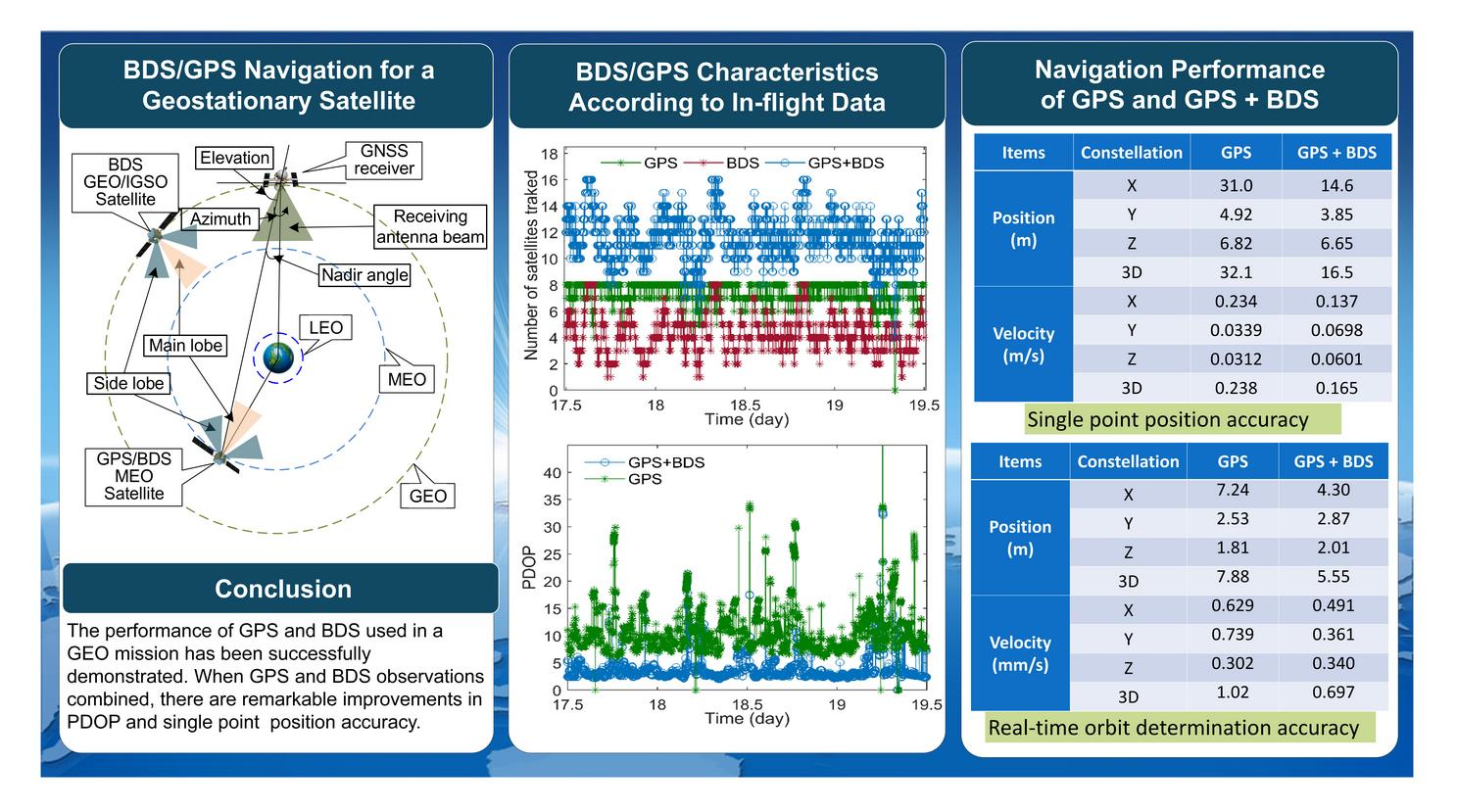
The GEO satellite of No.5 Telecommunication Technology Test Satellite (TJS-5) was launched on 7 January 2020, and a high sensitivity GNSS receiver has been installed to realize tracking GPS and BDS signals and to perform orbit determination autonomously. In this study, we investigate the flight signal characteristics in this GEO missions, considering GPS and BDS in terms of availability, PDOP, C/N0, the observation quantity and accuracy. Then, we give the performance evaluation of single-epoch least square solutions and real–time orbit determination solutions and discuss the contribution of BDS signals to GEO applications.
2. System and Methods Description
In the GEO satellite of TJS-5 experiment, the altitude of the receiver is higher than that of the MEO navigation satellite, as shown in
Figure 1. Therefore the GNSS receiver receives the signals from the other side of the earth and the elevation of this receiver is negative. A high-gain antenna in form of bifilar helix mounted in a deployable structure is oriented toward the center of the earth. The gain of this antenna is more than 7 dB within an angle of −30°–+30° according to the measured data. It should be noted that the BDS GEO/IGSO satellites and receiver are on the same orbital plane over the Asia Pacific. The elevation of these BDS GEO/IGSO satellites is beyond the beam range of the receiving antenna (−30°–+30°). In this situation, whether BDS GEO/IGSO satellites signal can be received or not depends on the signal transmission distance, the side-lobe gain of the navigation satellite antenna and the receiving antenna gain.
A high-sensitivity receiver are used for acquisition and tracking the weak navigation signals in this experiment.
Table 1 provides some information about this GNSS receiver. The architecture of this high-sensitivity spaceborne receiver is shown in
Figure 2. The filter, low noise amplifier (LNA), and the RF-front ends downconvert the navigation signals to intermediate frequency (IF) signals which are sampled at 56.8 MHz. The RF-front is driven by a stable, low-phase noise, 10MHz oven-controlled crystal oscillator (OXCO). The high sensitivity fast acquisition and tracking are performed in the digital application specific integrated circuit (ASIC), which is embedded in a rad-hard system on chip (SOC). Raw measurements (pseudorange, carrier phase, ephemeris, time, etc.) are generated and used for the single point position and real-time orbit determination by the CPU in this SOC. The receiver can track up to eight GPS satellites and eight BDS satellites with 16-channel hardware correlators simultaneously. A real-time orbit determination filter based on an extended Kalman filter (EKF) in this receiver works with pseudorange observations and dynamic models.
This receiver can process L1 C/A signals of 32 GPS satellites of the PRN G01–G32. Moreover, this receiver can be compatible with the BeiDou regional system (BDS-2) and the BeiDou global system (BDS-3), which have three orbit types: medium earth orbit (MEO), inclined geostationary orbit (IGSO), and GEO [
25,
26]. The receiver can process the B1I signals of 37 BDS satellites of the PRN C01–C37. Because C15, C17, C18 and C31 satellites are out of service, there are 33 BDS satellites which can be tracked by the receiver, including 5 BDS-2 GEO, 7 BDS-2 IGSO, 3 BDS-2 MEO, and 18 BDS-3 MEO satellites, as listed in
Table 2.
3. BDS/GPS Signal Characteristics
The onboard receiver has demonstrated the ability of tracking GPS and BDS signals in GEO. The flight data generated by the GNSS receiver was downloaded to the ground. In this section, we analyze the signal characteristics of BDS and GPS including observations quantity and distribution, availability, PDOP, observations accuracy.
3.1. Observations Quantity and Availability
In two days from 12:00 on 17 May to 12:00 on 19 May 2020, a total of 512,819 GPS observations and 299,523 BDS observations have been obtained at 2 s intervals. The number of GPS satellites tracked includes: 12 IIF, 11 IIR, 7 IIR-M, and 2 III satellites. The percentage of the GPS observations for IIF, IIR, IR-M, III satellites, are counted to be 27.4%, 41.4%, 27.6%, and 3.6%, respectively. The average observations of GPS III and IIF satellites are significantly less than those of the other two types of GPS satellites.
Among the 33 BDS satellites, only C01, C02 and C05 of 3 BDS GEO satellites have no observations data. The percentage of the observations from 2 BDS GEO (C03 and C04), 7 BDS IGSO, and 21 BDS MEO satellites, are counted to be 21.7%, 9.1%, 69.2%, respectively. Although the number of BDS GEO satellites tracked is only two, the observations quantity of these two satellites accounts for a large proportion.
According to results shown in
Figure 3, the mean number of the GPS satellites tracked over two days is 7.4 and the mean number for the BDS satellites tracked is 4.3. Because each constellation in the receiver has only eight-channel hardware correlator, it can track up to eight satellites simultaneously. Considering the combination of GPS and BDS constellations, it remarkably increases the number of satellites tracked. The mean number for the GPS + BDS satellites tracked is 11.7.
Figure 4 gives the tracking periods of the BDS satellites over two days. The BDS satellite of GEO C04 has the longest continuous tracking time, accounting for 68.9% of the two days. The continuous tracking time of the six BDS IGSO satellites is shorter than other GPS or BDS satellites.
3.2. PDOP
PDOP in common use is useful to characterize the accuracy of the position and velocity solutions. It can be computed based on the square root of the trace of the
matrix. The matrix
H is called as the design matrix or the Jacobian matrix and related with the least-squares solution in single point position. The matrix of
is expressed in form [
27,
28]
where
n,
m are the number of GPS or BDS satellites, respectively.
denote the direction cosine vector from the receiver position of
to the
nth satellite of GPS.
denote the direction cosine vector from the receiver position of
to the
mth satellite of BDS. When using combination of GPS and BDS, the matrix
H is a (
n + m) × 5, otherwise the matrix
H is a
n × 4 and the last column in Equation (1) is ignored [
27,
28]. The PDOP can be obtained from
According to the Equation (1) and Equation (2), the mean value of PDOP of GPS and GPS + BDS over two days are 10.24 and 3.91, respectively. It can obviously reduce the PDOP when we use GPS + BDS constellations, as shown in
Figure 5.
Sky views of the GPS and BDS satellites tracked are given in
Figure 6. The nadir angles range of BDS satellites tracked is larger than that of GPS satellites tracked. Especially, the nadir angles of BDS GEO and IGSO satellites tracked are in range of 45° to 85°, which are larger than those of BDS MEO satellites tracked. This indicates that a positive contribution of BDS GEO and IGSO satellites to the improvement of PDOP is expected, although the number of these satellites tracked is not large in this mission.
3.3. Observations Distribution and Accuracy
C/N
0 is an important indicator about the signals power, which is related to the accuracy of observations.
Figure 7 gives the distribution of GPS and BDS observations with respect to C/N
0. Most of the GPS, BDS-2 IGSO, and BDS-2 MEO observations are in C/N
0 range of above 30 dB-Hz and below 35 dB-Hz. However, for BDS-3 MEO satellites, the number of observations in C/N
0 above 40 is more than that in other C/N
0 range. This indicates that most of the observations was observed from the main-lobe signals of BDS-3 MEO antenna.
The pseudorange
and carrier phase
, respectively, are [
22]
where
is the geometric range between the receiver and the navigation satellite;
and
are navigation satellite clock offset and receiver clock offset, respectively; and c is the speed of light.
represent the troposphere and ionosphere delay errors, respectively. The parameter
denotes the ambiguity of the carrier phase measurements.
and
are the measurement noises, for the pseudorange and the carrier phase, respectively. We use epoch difference arithmetics to analyze carrier phase measurement noise [
22,
29]. In general, only random noise remains when using triple difference, which is described as follows:
Therefore, we use
and
as the pseudorange and carrier phase noise statistics. The standard deviation of the pseudorange and carrier phase noises are shown in
Figure 8. The pseudorange measurement noises are less than 4 m, and the carrier measurement noises are mostly less than 8 mm. The pseudorange and carrier phase noises of BDS measurements are lower than those of GPS measurements. Especially the pseudorange noises of BDS measurements are mostly less than 2 m in term of C/N
0 bellow 30, which are obvious lower than those of GPS measurements. According to accuracy estimation method of the code tracking errors as described in [
27], the thermal noise jitter of code delay locked loop (DLL) is related to code chipping rate. Therefore, the pseudorange accuracy of BDS measurements is higher than that of GPS measurements, because the BDS B1I code chipping rate of 2046 Kbps is higher than the GPS C/A code chipping rate of 1023 Kbps.
5. Conclusions
For the GEO satellite of the TJS-5 mission, we use a high sensitivity receiver with a high-gain antenna to realize real-time navigation. In this study, we analyze the inflight data generated by this sensitivity receiver, which can track weak BDS and GPS signals. We investigate the GNSS signal characteristics, including observations quantity and distribution, availability, PDOP, observations accuracy. It is found that when BDS and GPS are combined, the number of navigation satellites tracked will increase significantly and the PDOP can be reduced obviously. Although the number of BDS satellites tracked is less than that of GPS, it makes a positive contribution to the improvement of PDOP and navigation solutions. In order to analyze the observations distribution characteristics, the number of observations with respect to the C/N0 was analyzed. Most of the GPS and BDS observations are concentrated in C/N0 range of above 30 dB-Hz and below 35 dB-Hz, except BDS-3 MEO satellite observations. We use epoch difference arithmetics to analyze observations noises. The standard deviation of the pseudorange noises are less than 4 m, and the corresponding carrier phase noises are mostly less than 8 mm. The pseudorange and carrier phase noises of BDS measurements are lower than those of GPS measurements.
We give the navigation performance using only GPS observations and GPS + BDS observations combination at different weights. As for the single-epoch least square solutions, remarkable improvements in position and velocity accuracy are made with the combined GPS and BDS observations. Through comparisons with the precision reference orbits, when combining GPS observations with BDS observations at the weight of 1:1, the RMS of these position solutions accuracy can improve from 32.1 m to 16.5 m and the corresponding velocity accuracy can improve from 0.238 m/s to 0.165 m/s. Especially in x-axis direction, the position accuracy can improve from 31.0 m to14.6 m. We discuss the accuracy influence when BDS GEO/IGSO and MEO combined with GPS respectively. In this case, when BDS IGSO and GEO observations involved, there is an obvious improvement in position and velocity. As for the real-time orbit determination solutions, the RMS of position accuracy is 5.55 m and that of velocity accuracy is 0.697 mm/s when GPS and BDS pseudorange combined at a weight of 1:1. When we increase the weight of BDS observations, although the accuracy in x-axis direction has some improvements, the accuracy in y-axis direction and z-axis direction become worse.
We need to do further research into some aspects to improve the accuracy in future high-earth-orbit missions. A comprehensive utilization of GPS, GLONASS, BDS and GALILEO system should be taken into account to improve orbit determination accuracy by increasing the number of available satellites and reducing PDOP. In addition, carrier observations should be considered to increase navigation accuracy, because the accuracy of carrier observations is higher than that of pseudorange observations. For the high-orbit satellites with orbit maneuver, the research on how to use IMU to realize integrated navigation is necessary.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}