
An Improved R-Index Model for Terrain Visibility Analysis for Landslide Monitoring with InSAR

 ,
, 
Abstract
1. Introduction
2. Formulation of the Improved R-Index Model
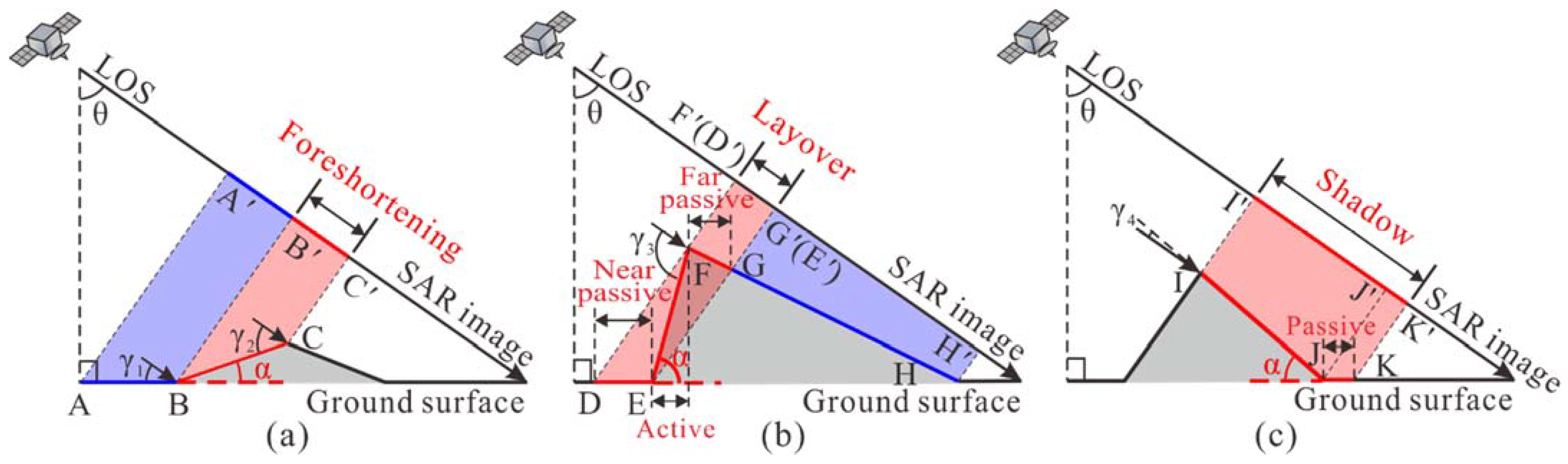
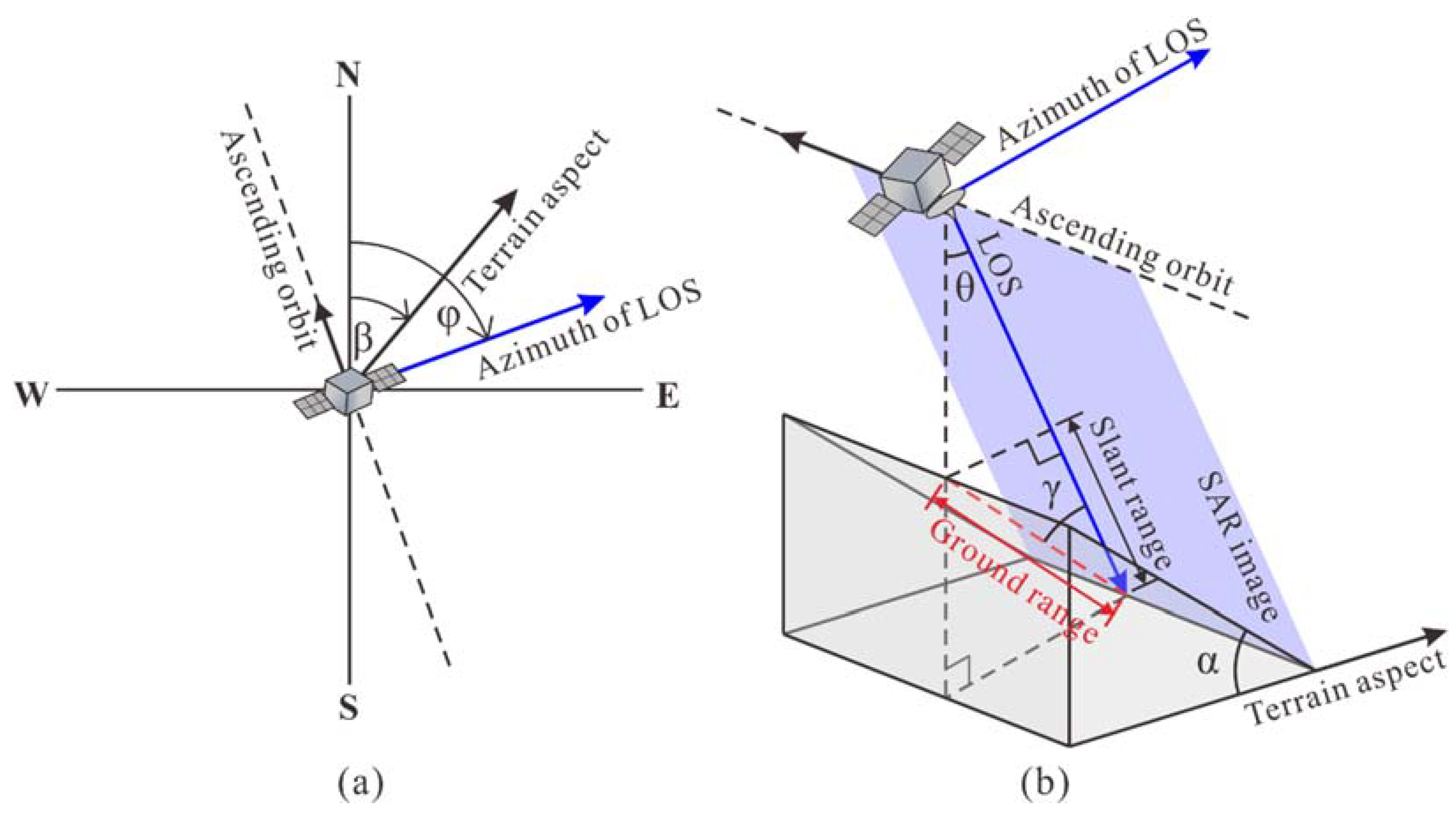
2.1. The Geometric Distortions in SAR Images
2.2. The R-Index Model and Its Potential Limitation
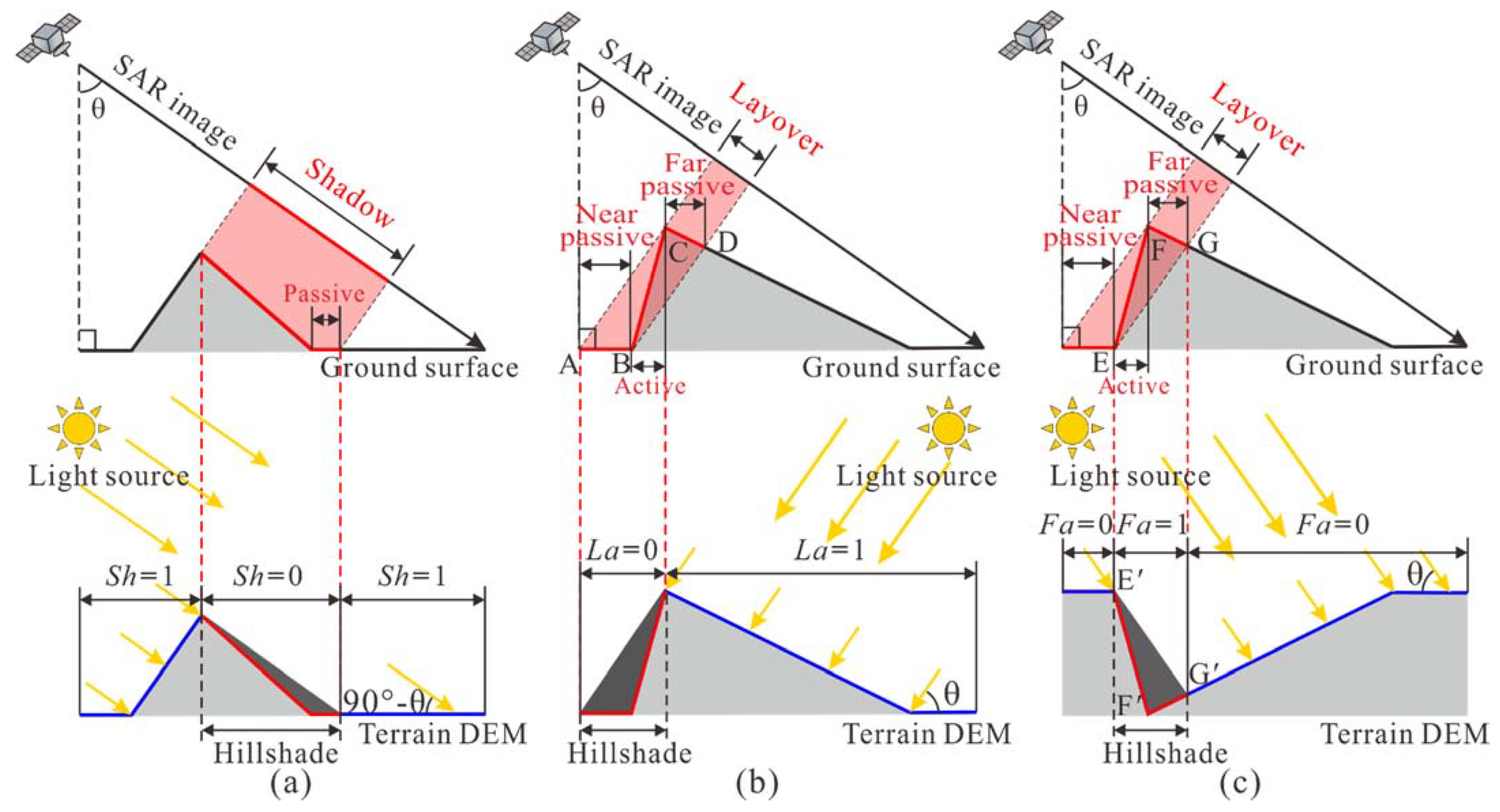
2.3. The Improved R-Index Model
3. Application of the Improved R-Index Model: Terrain Visibility Analysis in Fengjie
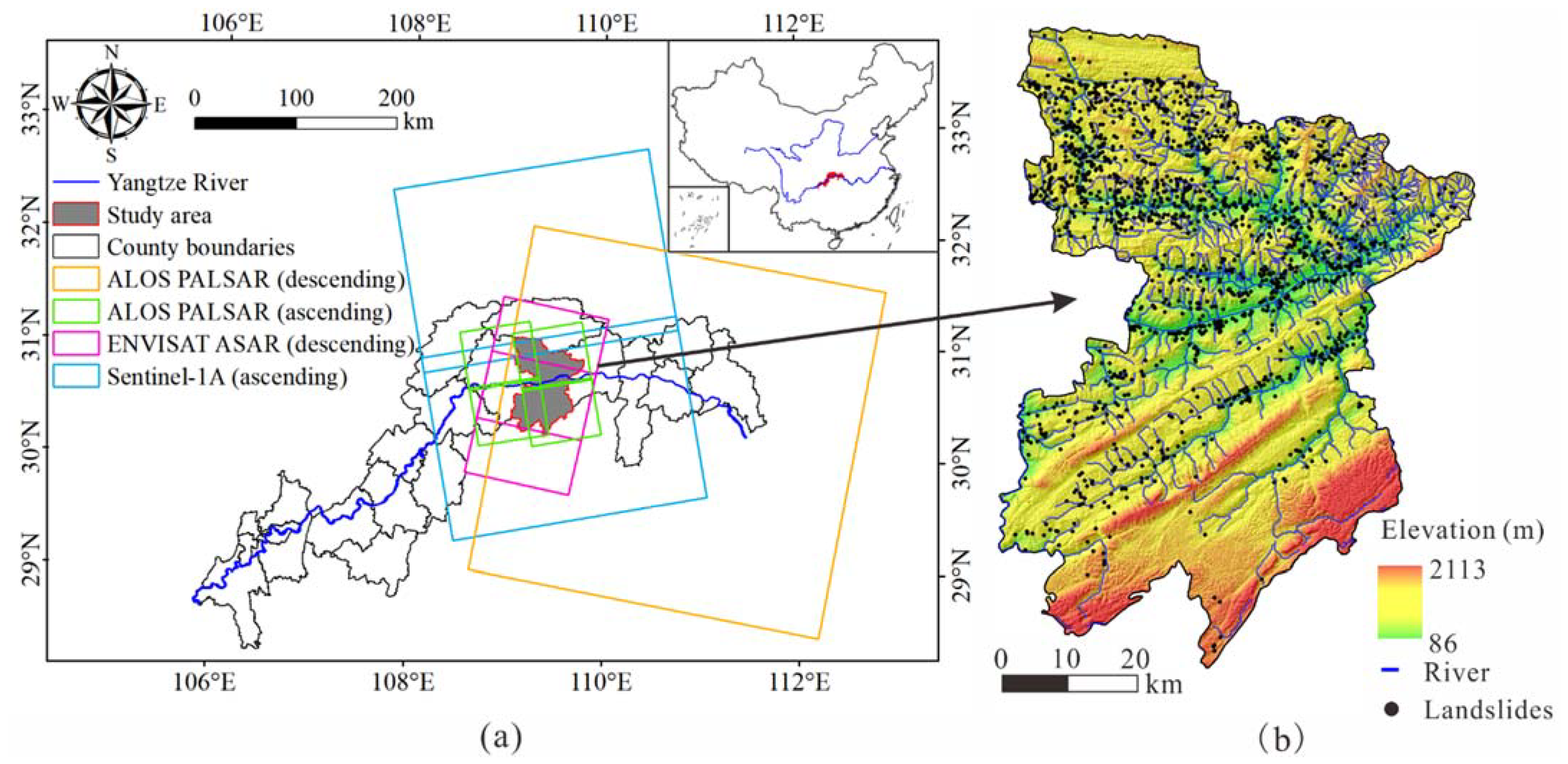
3.1. The Geological Setting of the Study Area and the Parameters of the Satellite LOS
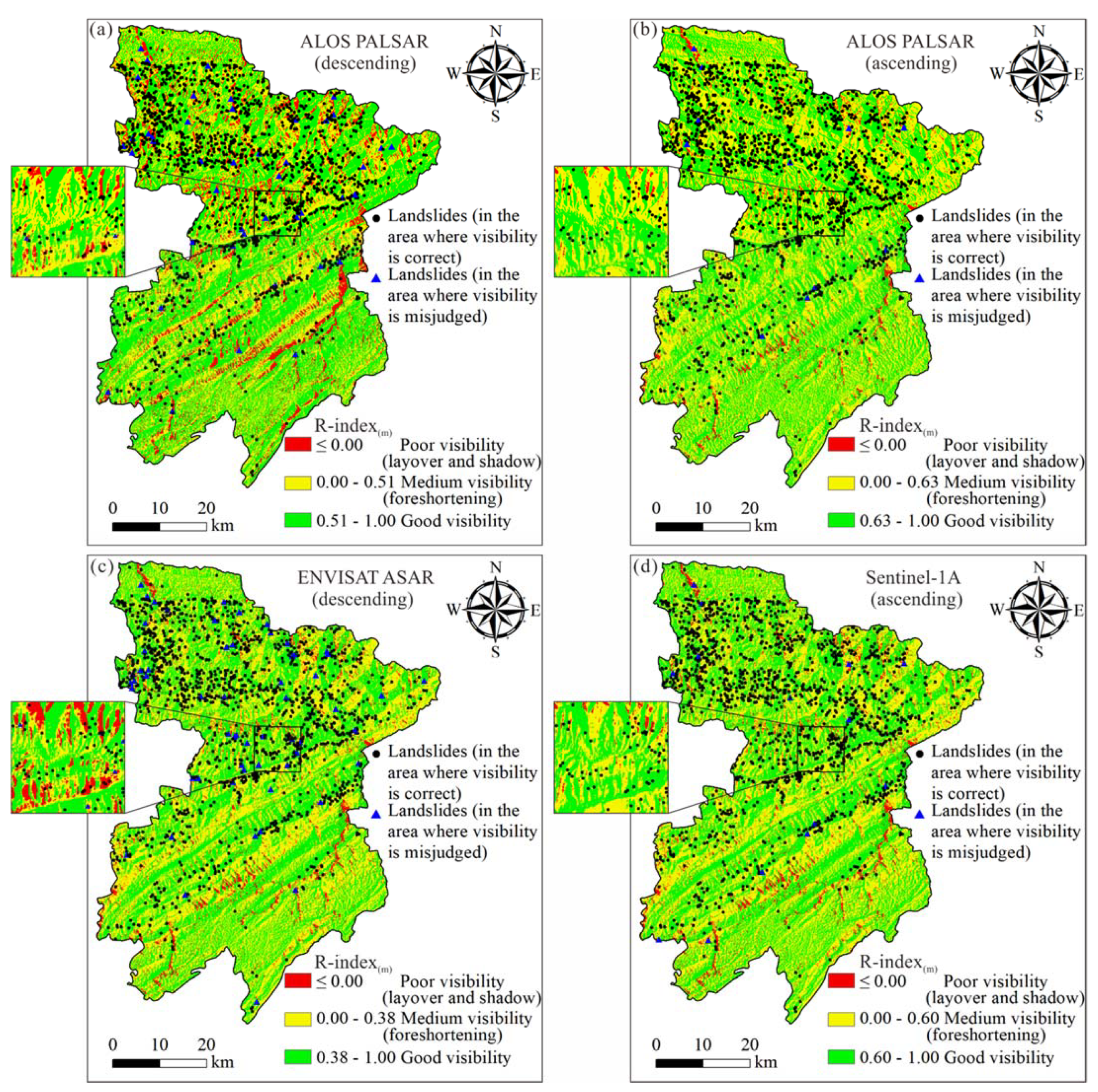
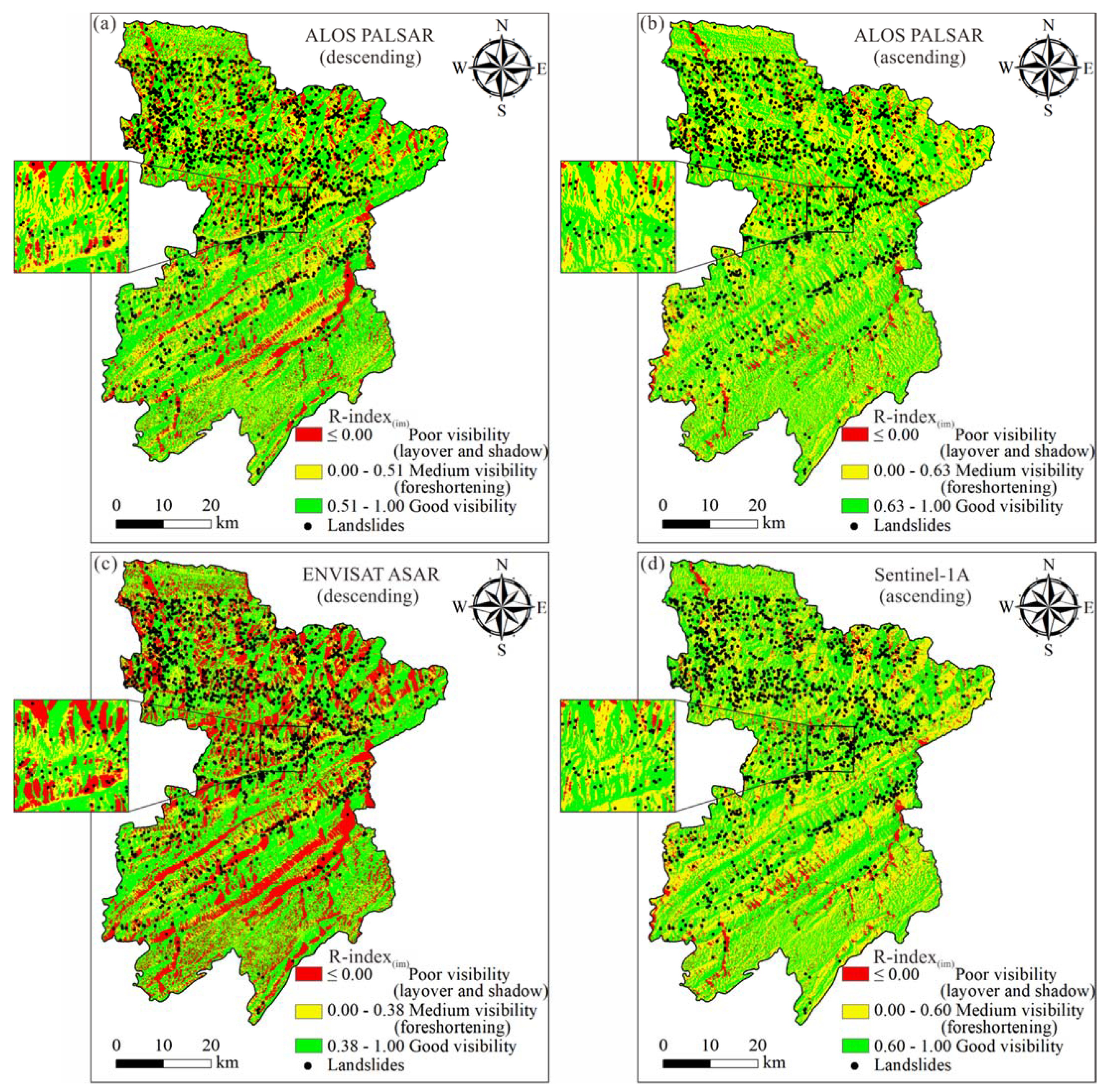
3.2. Terrain Visibility Analysis in Fengjie with the Improved R-Index Model
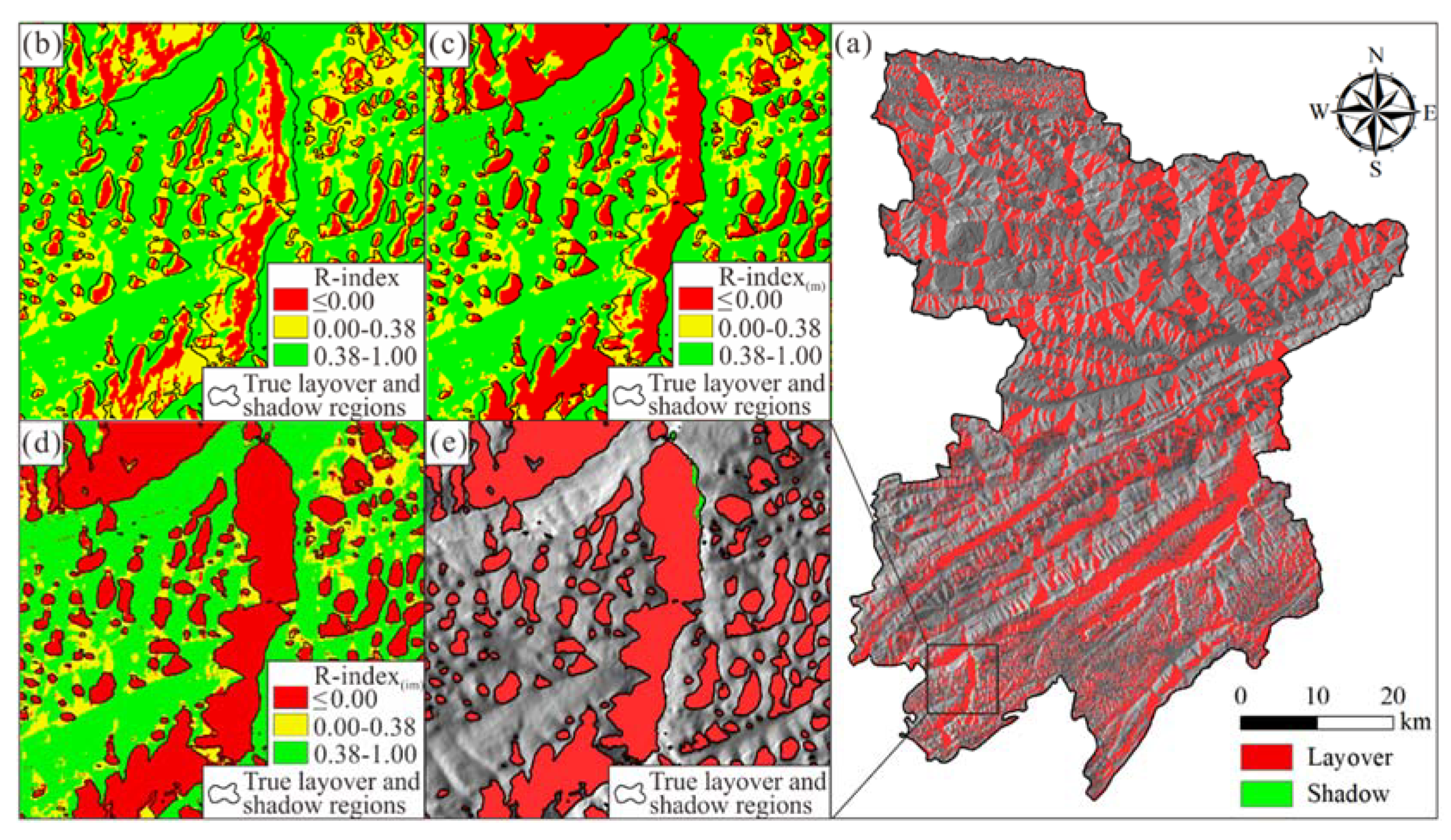
3.3. Comparisons between the Improved R-Index Model and the Existing R-Index Models
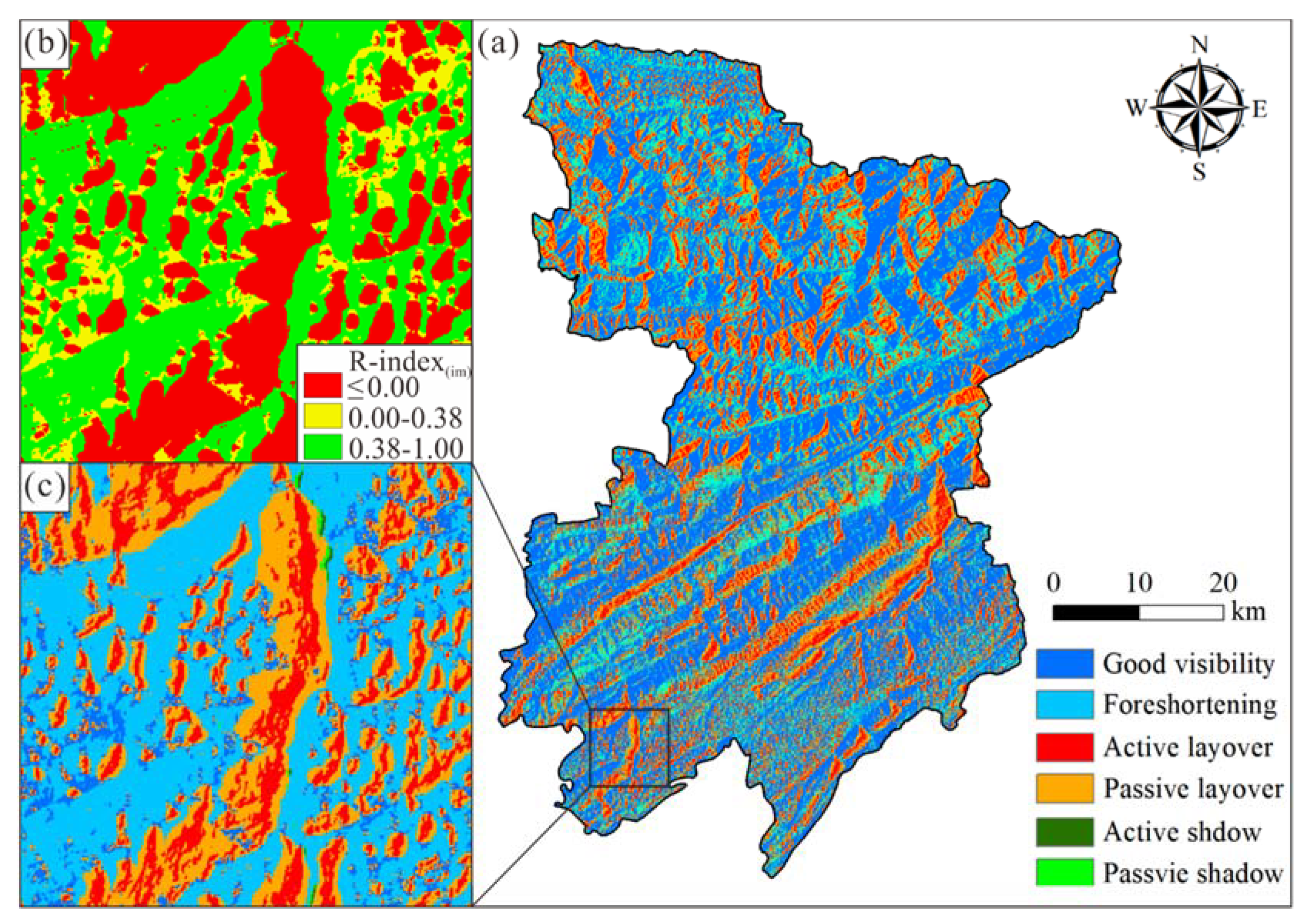
3.4. Comparison between the Improved R-Index Model and the P-NG Method
4. Discussions on the Influencing Parameters of the Terrain Visibility
4.1. Influences of the Orientation of the Satellite LOS on the Terrain Visibility
4.2. Influence of the Resolution of the Terrain DEM on the Terrain Visibility
5. Conclusions
- (1)
- Compared to the existing R-index models, the improved R-index model is shown more effective in detecting the layover regions (i.e., the visibility of which is poor) in SAR images. With the aid of the improved R-index model, the error in the terrain visibility evaluation can be effectively reduced, allowing for a more informed selection of SAR images in the landslide monitoring in mountainous regions. Meanwhile, the improved R-index model might be more computational efficient than the P-NG method in the terrain visibility evaluation of large areas.
- (2)
- SAR images collected by the descending ALOS PALSAR could be more suitable for monitoring W-facing landslides in Fengjie, while those collected by the ascending ALOS PALSAR could be more suitable for monitoring E-facing landslides in Fengjie. A combined use of the ascending and descending SAR images provides a promising solution to overcome the problem of poor visibility caused by the application of a single set of SAR images.
- (3)
- With the improvement of the resolution of the DEM of the local terrain, the terrain visibility can be more accurately evaluated, thus a higher resolution DEM should be preferred in the terrain visibility evaluation of SAR images. In consideration of the tradeoff between the cost of the terrain DEM and the accuracy of the visibility evaluation, the DEM with resolution of 30 m/pixel, which could yield the best compromise solution in this tradeoff relationship, is recommended for the terrain visibility evaluation in Fengjie.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gong, W.; Juang, C.H.; Wasowski, J. Geohazards and human settlements: Lessons learned from multiple relocation events in Badong, China–Engineering geologist’s perspective. Eng. Geol. 2021, 285, 106051. [Google Scholar] [CrossRef]
- Warrick, J.A.; Ritchie, A.C.; Schmidt, K.M.; Reid, M.E.; Logan, J. Characterizing the catastrophic 2017 Mud Creek landslide, California, using repeat structure-from-motion (SfM) photogrammetry. Landslides 2019, 16, 1201–1219. [Google Scholar] [CrossRef]
- Zhang, Z.; He, S.; Liu, W.; Liang, H.; Yan, S.; Deng, Y.; Bai, X.Q.; Chen, Z. Source characteristics and dynamics of the October 2018 Baige landslide revealed by broadband seismograms. Landslides 2019, 16, 777–785. [Google Scholar] [CrossRef]
- Fan, X.; Tang, J.; Tian, S.; Jiang, Y. Rainfall-induced rapid and long-runout catastrophic landslide on July 23, 2019 in Shuicheng, Guizhou, China. Landslides 2020, 17, 2161–2171. [Google Scholar] [CrossRef]
- Mansour, M.F.; Morgenstern, N.R.; Martin, C.D. Expected damage from displacement of slow-moving slides. Landslides 2011, 8, 117–131. [Google Scholar] [CrossRef]
- Massey, C.I.; Petley, D.N.; McSaveney, M.J. Patterns of movement in reactivated landslides. Eng. Geol. 2013, 159, 1–19. [Google Scholar] [CrossRef]
- Jiang, S.; Wen, B.P.; Zhao, C.; Li, R.D.; Li, Z.H. Kinematics of a giant slow-moving landslide in Northwest China: Constraints from high resolution remote sensing imagery and GPS monitoring. J. Asian Earth Sci. 2016, 123, 34–46. [Google Scholar] [CrossRef]
- Xin, P.; Liang, C.; Wu, S.; Liu, Z.; Shi, J.; Wang, T. Kinematic characteristics and dynamic mechanisms of large-scale landslides in a loess plateau: A case study for the north bank of the Baoji stream segment of the Wei River, China. Bull. Eng. Geol. Environ. 2016, 75, 659–671. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Van Westen, C.J.; Jetten, V.; Kumar, K.V. Object-oriented analysis of multi-temporal panchromatic images for creation of historical landslide inventories. ISPRS J. Photogramm. Remote Sens. 2012, 67, 105–119. [Google Scholar] [CrossRef]
- Liao, M.; Tang, J.; Wang, T.; Balz, T.; Zhang, L. Landslide monitoring with high-resolution SAR data in the Three Gorges region. Sci. China Earth Sci. 2012, 55, 590–601. [Google Scholar] [CrossRef]
- Farina, P.; Colombo, D.; Fumagalli, A.; Marks, F.; Moretti, S. Permanent Scatterers for landslide investigations: Outcomes from the ESA-SLAM project. Eng. Geol. 2006, 88, 200–217. [Google Scholar] [CrossRef]
- Cascini, L.; Fornaro, G.; Peduto, D. Advanced low-and full-resolution DInSAR map generation for slow-moving landslide analysis at different scales. Eng. Geol. 2010, 112, 29–42. [Google Scholar] [CrossRef]
- Hilley, G.E.; Bürgmann, R.; Ferretti, A.; Novali, F.; Rocca, F. Dynamics of slow-moving landslides from permanent scatterer analysis. Science 2004, 304, 1952–1955. [Google Scholar] [CrossRef]
- Meisina, C.; Zucca, F.; Fossati, D.; Ceriani, M.; Allievi, J. Ground deformation monitoring by using the permanent scatterers technique: The example of the Oltrepo Pavese (Lombardia, Italy). Eng. Geol. 2006, 88, 240–259. [Google Scholar] [CrossRef]
- García-Davalillo, J.C.; Herrera, G.; Notti, D.; Strozzi, T.; Álvarez-Fernández, I. DInSAR analysis of ALOS PALSAR images for the assessment of very slow landslides: The Tena Valley case study. Landslides 2014, 11, 225–246. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; He, Y.; Peng, J.; Yang, C.; Kang, Y. Small-scale loess landslide monitoring with small baseline subsets interferometric synthetic aperture radar technique—case study of Xingyuan landslide, Shaanxi, China. J. Appl. Remote Sens. 2016, 10, 026030. [Google Scholar] [CrossRef]
- Chen, Q.; Cheng, H.; Yang, Y.; Liu, G.; Liu, L. Quantification of mass wasting volume associated with the giant landslide Daguangbao induced by the 2008 Wenchuan earthquake from persistent scatterer InSAR. Remote Sens. Environ. 2014, 152, 125–135. [Google Scholar] [CrossRef]
- Bayer, B.; Simoni, A.; Mulas, M.; Corsini, A.; Schmidt, D. Deformation responses of slow moving landslides to seasonal rainfall in the Northern Apennines, measured by InSAR. Geomorphology 2018, 308, 293–306. [Google Scholar] [CrossRef]
- Zhao, C.; Kang, Y.; Zhang, Q.; Lu, Z.; Li, B. Landslide identification and monitoring along the Jinsha River catchment (Wudongde reservoir area), China, using the InSAR method. Remote Sens. 2018, 10, 993. [Google Scholar] [CrossRef]
- Colesanti, C.; Wasowski, J. Investigating landslides with space-borne Synthetic Aperture Radar (SAR) interferometry. Eng. Geol. 2006, 88, 173–199. [Google Scholar] [CrossRef]
- Rees, W.G. Simple masks for shadowing and highlighting in SAR images. Int. J. Remote Sens. 2000, 21, 2145–2152. [Google Scholar] [CrossRef]
- Notti, D.; Davalillo, J.C.; Herrera, G.; Mora, O. Assessment of the performance of X-band satellite radar data for landslide mapping and monitoring: Upper Tena Valley case study. Nat. Hazards Earth Syst. Sci. 2010, 10, 1865–1875. [Google Scholar] [CrossRef]
- Notti, D.; Meisina, C.; Zucca, F.; Colombo, A. Models to predict Persistent Scatterers data distribution and their capacity to register movement along the slope. In Proceedings of the Fringe 2011 Workshop, Frascati, Italy, 19–23 September 2011; pp. 19–23. [Google Scholar]
- Cigna, F.; Bateson, L.; Jordan, C.; Dashwood, C. Feasibility of InSAR technologies for nationwide monitoring of geohazards in Great Britain. In Proceedings of the Remote Sensing and Photogrammetry Society Conference 2012, London, UK, 12–14 September 2012. [Google Scholar]
- Plank, S.; Singer, J.; Minet, C.; Thuro, K. Pre-survey suitability evaluation of the differential synthetic aperture radar interferometry method for landslide monitoring. Int. J. Remote Sens. 2012, 33, 6623–6637. [Google Scholar] [CrossRef]
- Cigna, F.; Bateson, L.B.; Jordan, C.J.; Dashwood, C. Simulating SAR geometric distortions and predicting Persistent Scatterer densities for ERS-1/2 and ENVISAT C-band SAR and InSAR applications: Nationwide feasibility assessment to monitor the landmass of Great Britain with SAR imagery. Remote Sens. Environ. 2014, 152, 441–466. [Google Scholar] [CrossRef]
- Notti, D.; Herrera, G.; Bianchini, S.; Meisina, C.; García-Davalillo, J.C.; Zucca, F. A methodology for improving landslide PSI data analysis. Int. J. Remote Sens. 2014, 35, 2186–2214. [Google Scholar] [CrossRef]
- Chen, X.; Sun, Q.; Hu, J. Generation of complete SAR geometric distortion maps based on DEM and neighbor gradient algorithm. Appl. Sci. 2018, 8, 2206. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, X.; Chen, G.; Qiao, L.; Zeng, R.; Chang, J. Detection of geohazards in the Bailong River Basin using synthetic aperture radar interferometry. Landslides 2016, 13, 1273–1284. [Google Scholar] [CrossRef]
- Vecchiotti, F.; Peduto, D.; Strozzi, T. Multi-sensor a priori PSI visibility map for nationwide landslide detection in Austria. In Workshop on World Landslide Forum; Springer: Cham, Switzerland, 2017; pp. 45–52. [Google Scholar]
- Novellino, A.; Cigna, F.; Brahmi, M.; Sowter, A.; Bateson, L.; Marsh, S. Assessing the feasibility of a national InSAR ground deformation map of Great Britain with Sentinel-1. Geosciences 2017, 7, 19. [Google Scholar] [CrossRef]
- Kropatsch, W.G.; Strobl, D. The generation of SAR layover and shadow maps from digital elevation models. IEEE Trans. Geosci. Remote Sens. 1990, 28, 98–107. [Google Scholar] [CrossRef]
- Zhang, Y. Detecting Ground Deformation and Investigating Landslides Using InSAR Technique-Taking Middle Reach of Bailong River Basin as an Example. Ph.D. Thesis, Lanzhou University, Lanzhou, China, 2018. [Google Scholar]
- Dai, K.; Li, Z.; Tomás, R.; Liu, G.; Yu, B.; Wang, X.; Cheng, H.; Chen, J.; Stockamp, J. Monitoring activity at the Daguangbao mega-landslide (China) using Sentinel-1 TOPS time series interferometry. Remote Sens. Environ. 2016, 186, 501–513. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonnell, R.A. Principles of Geographical Information Systems; Oxford University Press: HongKong, China, 1998. [Google Scholar]
- Wang, K.; Xu, H.; Zhang, S.; Wei, F.; Xie, W. Identification and Extraction of Geomorphological Features of Landslides Using Slope Units for Landslide Analysis. ISPRS Int. J. Geo-Inf. 2020, 9, 274. [Google Scholar] [CrossRef]
- Sun, D.; Wen, H.; Wang, D.; Xu, J. A random forest model of landslide susceptibility mapping based on hyperparameter optimization using Bayes algorithm. Geomorphology 2020, 362, 107201. [Google Scholar] [CrossRef]
- Guo, R.; Sumin, L.I.; Chen, Y.N.; Li, X.; Yuan, L. Identification and monitoring landslides in longitudinal range-gorge region with InSAR fusion integrated visibility analysis. Landslides 2020, 18, 551–568. [Google Scholar] [CrossRef]
- Pastor, J.L.; Tomás, R.; Lettieri, L.; Riquelme, A.; Cano, M.; Infante, D.; Ramondini, M.; Di Martire, D. Multi-Source data integration to investigate a deep-seated landslide affecting a bridge. Remote Sens. 2019, 11, 1878. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAR Satellite | Flight Direction | Radar Azimuth | Radar Incidence |
|---|---|---|---|
| ENVISAT ASAR | Descending | 285.00° | 22.25° |
| ALOS PALSAR | Ascending | 74.00° | 38.70° |
| ALOS PALSAR | Descending | 285.00° | 30.39° |
| Sentinel-1A | Ascending | 77.31° | 36.69° |
| Level of Visibility | Sentinel-1A (Ascending) | ENVISAT ASAR (Descending) | ALOS PALSAR (Ascending) | ALOS PALSAR (Descending) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R-Index(im) | Area (km2) | Landslide Number | R-Index(im) | Area (km2) | Landslide Number | R-Index(im) | Area (km2) | Landslide Number | R-index(im) | Area (km2) | Landslide Number | |
| Good visibility | 0.60–1.00 | 1922.52 | 695 | 0.38–1.00 | 1992.89 | 801 | 0.63–1.00 | 1965.56 | 700 | 0.51–1.00 | 2127.06 | 844 |
| Medium visibility (foreshortening) | 0.00–0.60 | 1897.64 | 808 | 0.00–0.38 | 854.03 | 365 | 0.00–0.63 | 1915.06 | 813 | 0.00–0.51 | 1378.81 | 534 |
| Poor visibility (layover) | 0.00 | 261.96 | 44 | 0.00 | 1251.05 | 384 | 0.00 | 196.01 | 31 | 0.00 | 587.11 | 170 |
| Poor visibility (shadow) | 0.00 | 16.87 | 3 | 0.00 | 1.03 | 0 | 0.00 | 22.38 | 6 | 0.00 | 6.01 | 2 |
| Level of Visibility | Sentinel-1A (Ascending) | ENVISAT ASAR (Descending) | ALOS PALSAR (Ascending) | ALOS PALSAR (Descending) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R-Index | Area (km2) | Landslide Number | R-Index | Area (km2) | Landslide Number | R-Index | Area (km2) | Landslide Number | R-Index | Area (km2) | Landslide Number | ||
| The original R-index model | Good visibility | 0.60–1.00 | 1950.22 | 702 | 0.38–1.00 | 2166.59 | 849 | 0.63–1.00 | 1993.50 | 704 | 0.51–1.00 | 2168.53 | 852 |
| Medium visibility (foreshortening) | 0.00–0.60 | 2075.08 | 837 | 0.00–0.38 | 1454.02 | 562 | 0.00–0.63 | 2051.90 | 840 | 0.00–0.51 | 1733.87 | 651 | |
| Poor visibility (layover) | ≤0.00 | 73.70 | 11 | ≤0.00 | 478.39 | 139 | ≤0.00 | 53.59 | 6 | ≤0.00 | 196.60 | 47 | |
| Poor visibility (shadow) | - | - | - | - | - | - | - | - | - | - | - | - | |
| The modified R-index model | Good visibility | 0.60–1.00 | 1927.33 | 695 | 0.38–1.00 | 2078.22 | 809 | 0.63–1.00 | 1968.16 | 700 | 0.51–1.00 | 2144.19 | 844 |
| Medium visibility (foreshortening) | 0.00–0.60 | 1972.43 | 823 | 0.00–0.38 | 1123.80 | 419 | 0.00–0.63 | 1981.48 | 825 | 0.00–0.51 | 1543.45 | 583 | |
| Poor visibility (layover) | ≤0.00 | 182.37 | 29 | ≤0.00 | 895.96 | 322 | ≤0.00 | 126.98 | 19 | ≤0.00 | 405.35 | 121 | |
| Poor visibility (shadow) | 0.00 | 16.87 | 3 | 0.00 | 1.03 | 0 | 0.00 | 22.38 | 6 | 0.00 | 6.01 | 2 | |
| Data Type | Source of Data | Resolution (m/pixel) | Cost | Area/Range |
|---|---|---|---|---|
| ALOS PALSAR DEM | http://www.tuxingis.com, accessed on 26 April 2021 | 12.5 | 1530 RMB | 82370 km2 |
| SRTM DEM Version 2 | https://data.nasa.gov, accessed on 26 April 2021 | 30 | Free | 21176 km2 |
| SRTM DEM Version 4 | https://srtm.csi.cgiar.org, accessed on 26 April 2021 | 90 | Free | 57315 km2 |
| Resampled SRTM DEM | https://srtm.csi.cgiar.org, accessed on 26 April 2021 | 250 | Free | Global Earth |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, T.; Gong, W.; Bowa, V.M.; Tang, H.; Chen, J.; Zhao, F. An Improved R-Index Model for Terrain Visibility Analysis for Landslide Monitoring with InSAR. Remote Sens. 2021, 13, 1938. https://doi.org/10.3390/rs13101938
Ren T, Gong W, Bowa VM, Tang H, Chen J, Zhao F. An Improved R-Index Model for Terrain Visibility Analysis for Landslide Monitoring with InSAR. Remote Sensing. 2021; 13(10):1938. https://doi.org/10.3390/rs13101938
Chicago/Turabian StyleRen, Tianhe, Wenping Gong, Victor Mwango Bowa, Huiming Tang, Jun Chen, and Fumeng Zhao. 2021. "An Improved R-Index Model for Terrain Visibility Analysis for Landslide Monitoring with InSAR" Remote Sensing 13, no. 10: 1938. https://doi.org/10.3390/rs13101938
APA StyleRen, T., Gong, W., Bowa, V. M., Tang, H., Chen, J., & Zhao, F. (2021). An Improved R-Index Model for Terrain Visibility Analysis for Landslide Monitoring with InSAR. Remote Sensing, 13(10), 1938. https://doi.org/10.3390/rs13101938