Underwater Topography Detection and Analysis of the Qilianyu Islands in the South China Sea Based on GF-3 SAR Images



Abstract

1. Introduction
2. Materials and Methods
2.1. Underwater Topography SAR Detection Model
2.2. Analysis of Detection Result
2.3. Study Area and Data
3. Underwater Topography SAR Detection of Qilianyu Islands
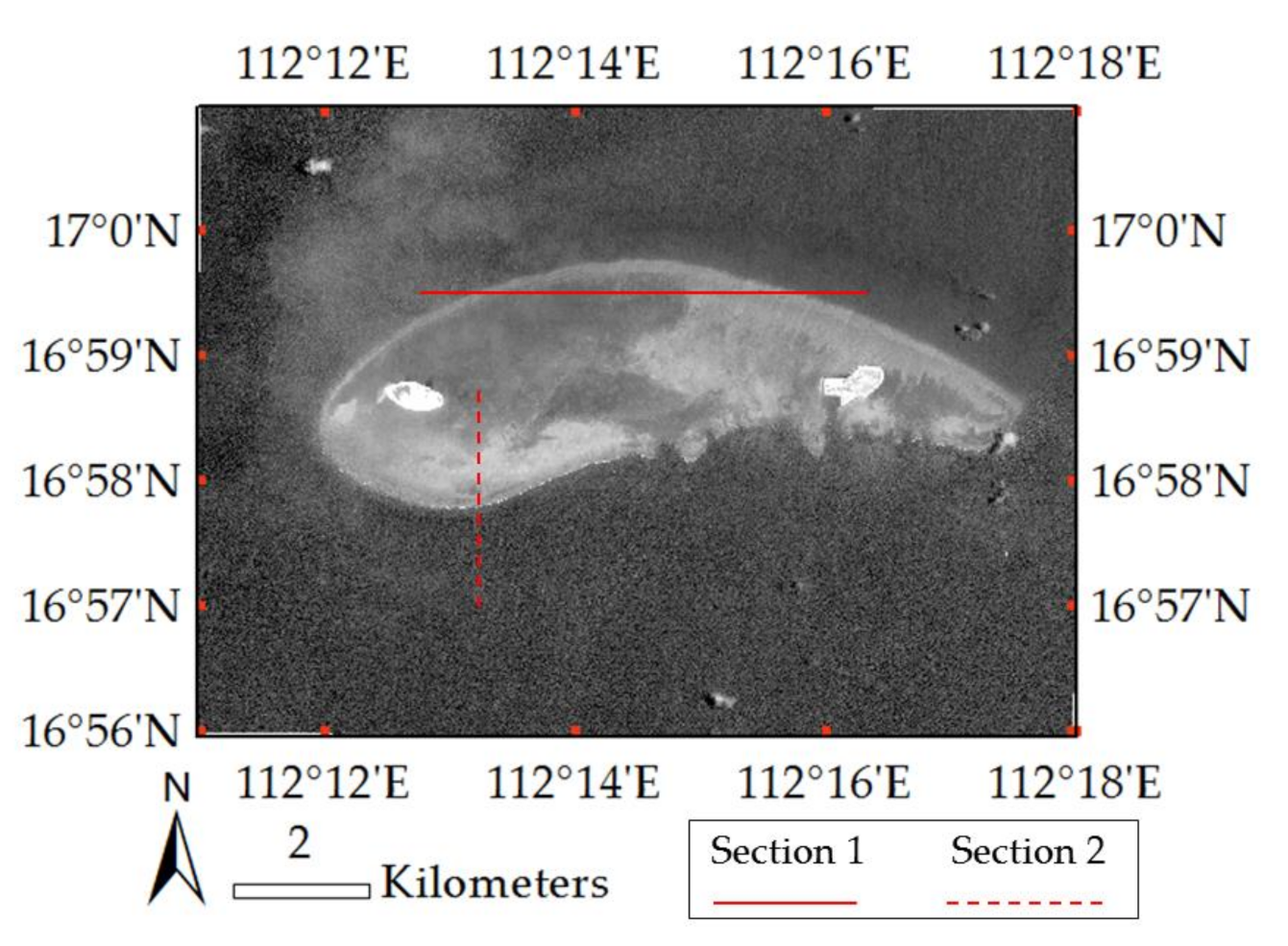
3.1. SAR Image Preprocessing
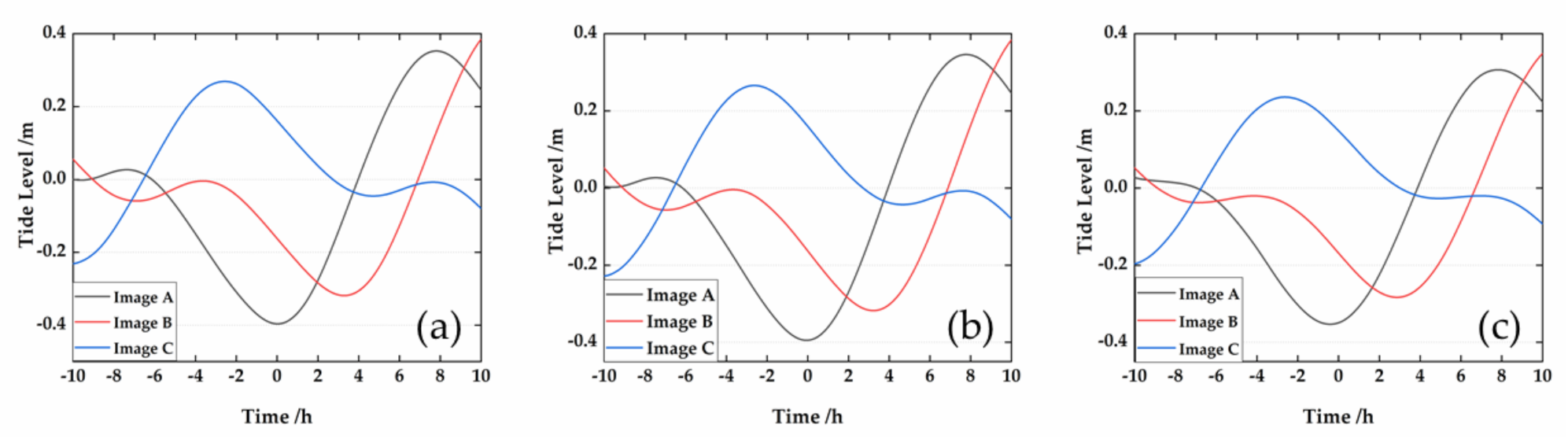
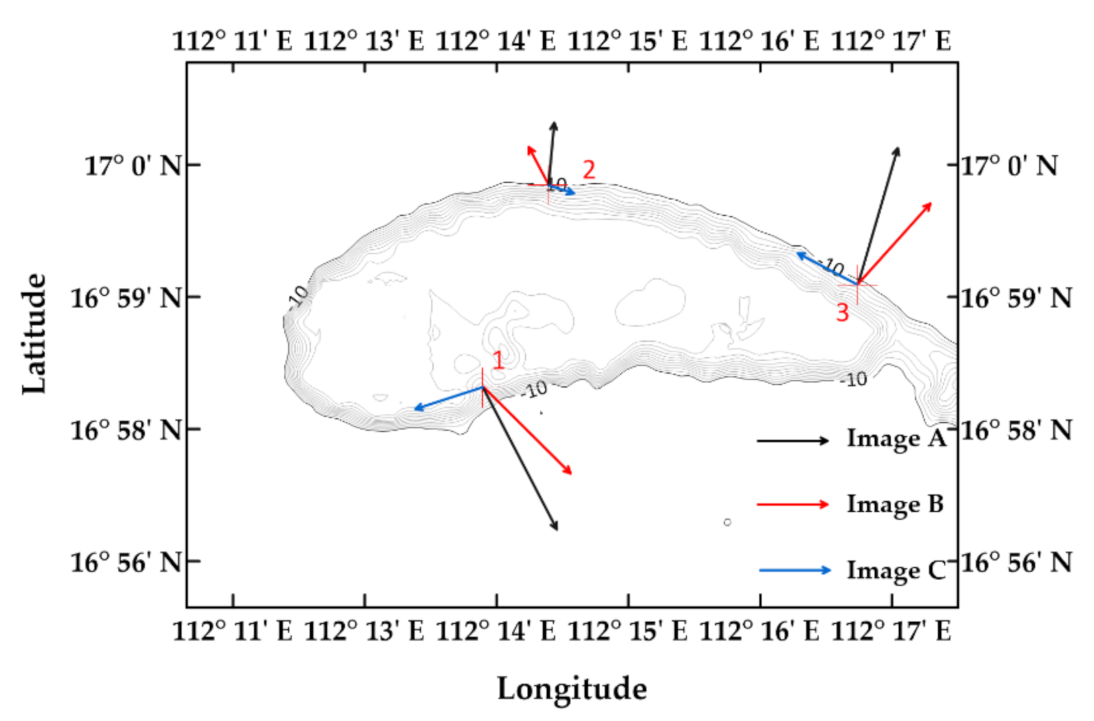
3.2. Calculation and Analysis of Tidal currents at Times of SAR Imaging
3.3. Water Depths Inversion
4. Results and Discussions
4.1. Results of Topography Detection
4.2. Comparison of the Accuracies of Different Imaging Times
4.3. Comparison of Accuracies at Different Water Depths
4.4. Comparison of Accuracy in Different Polarization Images
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Zhou, X.; Chen, Y.; Hu, G. The development in the latest technique of shallow water multi—Beam sounding system. Hydrogr. Surv. Charting 2005, 25, 67–70. [Google Scholar] [CrossRef]
- Guo, H. Theory and Application of Radar Earth Observation; Science Press: Beijing, China, 2000. [Google Scholar]
- Valenzuela, R. Theories for the interaction of electromagnetic and oceanic waves—A review. Bound. Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Alpers, W.; Hennings, I. A theory of the imaging mechanism of underwater bottom topography by real and synthetic aperture radar. J. Geophys. Res. Ocean. 1984, 89, 10529–10546. [Google Scholar] [CrossRef]
- Vogelzang, J. Mapping submarine sand waves with multiband imaging radar: 1. Model development and sensitivity analysis. J. Geophys. Res. Ocean. 1997, 102, 1163–1181. [Google Scholar] [CrossRef]
- Shuchman, R.; Lyzenga, D.; Meadows, G. Synthetic aperture radar imaging of ocean-bottom topography via tidal-current interactions: Theory and observations. Int. J. Remote Sens. 1985, 6, 1179–1200. [Google Scholar] [CrossRef]
- Zheng, Q.; Li, L.; Guo, X.; Ge, Y.; Zhu, D.; Li, C. SAR imaging and hydrodynamic analysis of ocean bottom topographic waves. J. Geophys. Res. Ocean. 2006, 111. [Google Scholar] [CrossRef]
- Li, X.; Li, C.; Xu, Q.; Pichel, W. Sea surface manifestation of along-tidal-channel underwater ridges imaged by SAR. IEEE Trans. Geoence Remote Sens. 2009, 47, 2467–2477. [Google Scholar] [CrossRef]
- Zheng, Q.; Zhao, Q.; Yuan, Y.; Xian, L.; Hu, J.; Liu, X.; Yin, L.; Ye, Y. Shear-flow induced secondary circulation in parallel underwater topographic corrugation and its application to satellite image interpretation. J. Ocean Univ. China 2012, 11, 427–435. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Fu, B.; Guan, W. SAR imaging of a topography-induced current front in a tidal channel. Int. J. Remote Sens. 2015, 36, 3563–3574. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, Q.; Cheng, Y.; Li, Y.; Huang, Q. Bathymetric features of Subei Bank on ENVISAT ASAR images. In Proceedings of the IEEE Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016. [Google Scholar]
- Zhang, S.; Xu, Q.; Zheng, Q.; Li, X. Mechanisms of SAR imaging of shallow water topography of the Subei Bank. Remote Sens. 2017, 9, 1203–1224. [Google Scholar] [CrossRef]
- Fan, K.; Huang, W.; He, M.; Fu, B.; Gan, X. Simulation study on the effect of wind on SAR imaging of shallow water Bathymetry. J. Remote Sens. 2008, 12, 743–749. [Google Scholar] [CrossRef]
- Huang, W.; Fu, B.; Zhou, C.; Yang, J.; Shi, A.; Li, D. Simulation of optimal synthetic aperture radar (SAR) parameters for mapping underwater bottom topography. J. Remote Sens. 2000, 4, 172–177. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Li, N.; Xu, Z. Multiple points of view and multiband SAR for underwater simulation research. Radar Sci. Technol. 2015, 13, 375–389. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Meng, J. The correlation analysis of underwater topography SAR imaging and tidal current. Acta Oceanologica Sinica 2012, 34, 53–60. [Google Scholar]
- Yuan, Y. Representation of high frequency spectra of ocean waves and the basis for analyzing SAR images. Oceanol. Limnol. Sin. 1997, 28, 1–5. [Google Scholar]
- Jin, M.; Yuan, Y. Formulation and solution of the mathematical and physical inverse problem of detecting sea topography by SAR images. Oceanol. Limnol. Sin. 1997, 28, 27–31. [Google Scholar]
- Wang, X.; Zhang, H.; Fu, B.; Guan, W.; Shi, A. Simulation and Analysis on SAR Imaging of Channel Topography Changes in the Pearl River Estuary. Mippr: Multispectral Image Acquisition, Processing, & Analysis; International Society for Optics and Photonics: Zhoushan, China, 2013. [Google Scholar]
- Bi, X.; Meng, J.; Yang, J.; Liu, Q. Application of SAR polarization information for detection of underwater topography. J. Remote Sens. 2013, 17, 34–45. [Google Scholar] [CrossRef]
- Bian, X.; Shao, Y.; Tian, W.; Wang, S.; Zhang, C.; Wang, X.; Zhang, Z. Underwater topography detection in coastal areas using fully polarimetric SAR data. Remote Sens. 2017, 9, 560–576. [Google Scholar] [CrossRef]
- Zhang, X.; Ma, Y.; Zhang, J. Shallow water bathymetry based on inherent optical properties using high spatial resolution multispectral imagery. Remote Sens. 2020, 12, 3027–3050. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, Y.; Tian, Z.; Liang, J. Impact of wavelet denoising on Multi-Spectral bathymetry inversion. Adv. Mar. Sci. 2015, 33, 334–341. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Hou, P.; Fu, B.; Zheng, G. Mapping the bathymetry of shallow coastal water using single-frame fine-resolution optical remote sensing imagery. Acta Oceanologica Sinica 2016, 35, 60–66. [Google Scholar] [CrossRef]
- Yang, J. An Assimilation Model for Underwater Topography Retrieval from Multi-Source Multitemporal SAR Data[D]. Graduate University of Chinese Academy of Sciences, Qingdao, China, 2007; pp. 20–22. [Google Scholar]
- Xiao, Y.; Cui, T.; Gong, J. A non-periodic stripes noises removal method for airborne SAR data. Adv. Mar. Sci. 2016, 34, 571–578. [Google Scholar] [CrossRef]
- Fang, G. Analysis and Forecasting of Tides and Tidal Currents, 1st ed.; China Ocean Press: Beijing, China, 1986; pp. 17–18. [Google Scholar]
- Ding, W. Distribution of tides and tidal currents in the south china sea. Oceanol. Limnol. Sin. 1986, 17, 468–480. [Google Scholar]
- Fu, B. Shallow Sea Bottom Topography Mapping by SAR[D]. Ocean University of China, Qingdao, China, 2005; pp. 39–44. [Google Scholar]
- Fu, B.; Fan, K.; Chen, P.; Shi, A.; Wang, X. Technology and Application of Synthetic Aperture Radar (SAR) Remote Sensing for Shallow Water Depth Detection, 1st ed.; China Ocean Press: Beijing, China, 2015; pp. 49–50. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Time (UTC) | Polarization | Resolution (m) | Mode |
|---|---|---|---|---|
| A | 14 June 2020 10:09 | HH, HV | 5 | Fine Stripmap-I |
| B | 01 July 2020 22:26 | VV, VH | 10 | Fine Stripmap-II |
| C | 04 January 2020 22:32 | VV, VH | 10 | Fine Stripmap-II |
| Image | MAE (m) | MRE (%) | R |
|---|---|---|---|
| A | 1.455 | 13.92 | 0.900 |
| B | 1.545 | 14.73 | 0.885 |
| C | 2.170 | 20.67 | 0.805 |
| Depth (m) | Error | Image A | Image B | Mean Error | ||
|---|---|---|---|---|---|---|
| HH Polarization | HV Polarization | VV Polarization | VH Polarization | |||
| 1–5 | MAE (m) | 2.38 | 2.30 | 1.97 | 2.23 | 2.22 |
| MRE (%) | 130 | 129 | 110 | 127 | 124 | |
| 5–10 | MAE (m) | 2.38 | 2.43 | 2.61 | 2.59 | 2.50 |
| MRE (%) | 33.75 | 34.58 | 37.11 | 36.95 | 35.60 | |
| 10–15 | MAE (m) | 0.98 | 1.00 | 1.06 | 1.03 | 1.02 |
| MRE (%) | 7.83 | 7.93 | 8.49 | 8.19 | 8.08 | |
| 15–20 | MAE (m) | 1.48 | 1.46 | 1.68 | 1.67 | 1.57 |
| MRE (%) | 9.16 | 9.16 | 10.52 | 10.46 | 9.83 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Yang, J.; Meng, J.; Zhang, J. Underwater Topography Detection and Analysis of the Qilianyu Islands in the South China Sea Based on GF-3 SAR Images. Remote Sens. 2021, 13, 76. https://doi.org/10.3390/rs13010076
Huang L, Yang J, Meng J, Zhang J. Underwater Topography Detection and Analysis of the Qilianyu Islands in the South China Sea Based on GF-3 SAR Images. Remote Sensing. 2021; 13(1):76. https://doi.org/10.3390/rs13010076
Chicago/Turabian StyleHuang, Longyu, Jungang Yang, Junmin Meng, and Jie Zhang. 2021. "Underwater Topography Detection and Analysis of the Qilianyu Islands in the South China Sea Based on GF-3 SAR Images" Remote Sensing 13, no. 1: 76. https://doi.org/10.3390/rs13010076
APA StyleHuang, L., Yang, J., Meng, J., & Zhang, J. (2021). Underwater Topography Detection and Analysis of the Qilianyu Islands in the South China Sea Based on GF-3 SAR Images. Remote Sensing, 13(1), 76. https://doi.org/10.3390/rs13010076