Employing a Multi-Input Deep Convolutional Neural Network to Derive Soil Clay Content from a Synergy of Multi-Temporal Optical and Radar Imagery Data

 , ,
, , 

Abstract
1. Introduction
2. Materials and Methods
2.1. Data Sets Description
2.1.1. Soil Reference Data
2.1.2. Optical Imagery Data
2.1.3. Radar Data
2.2. Bare soil Filtering
2.3. EO-Based Multispectral Regression Analysis
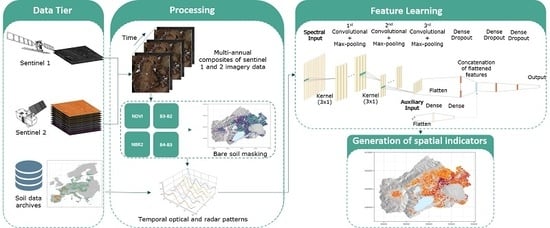
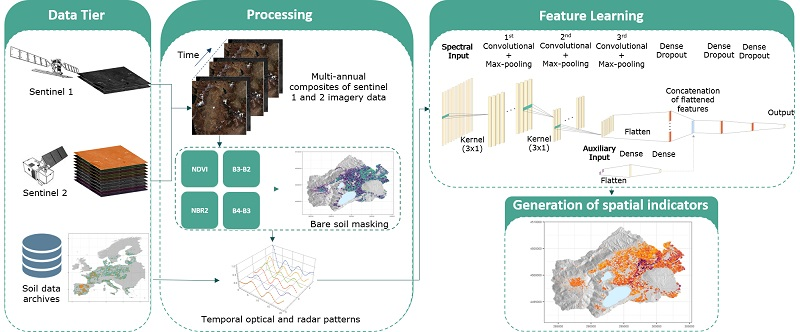
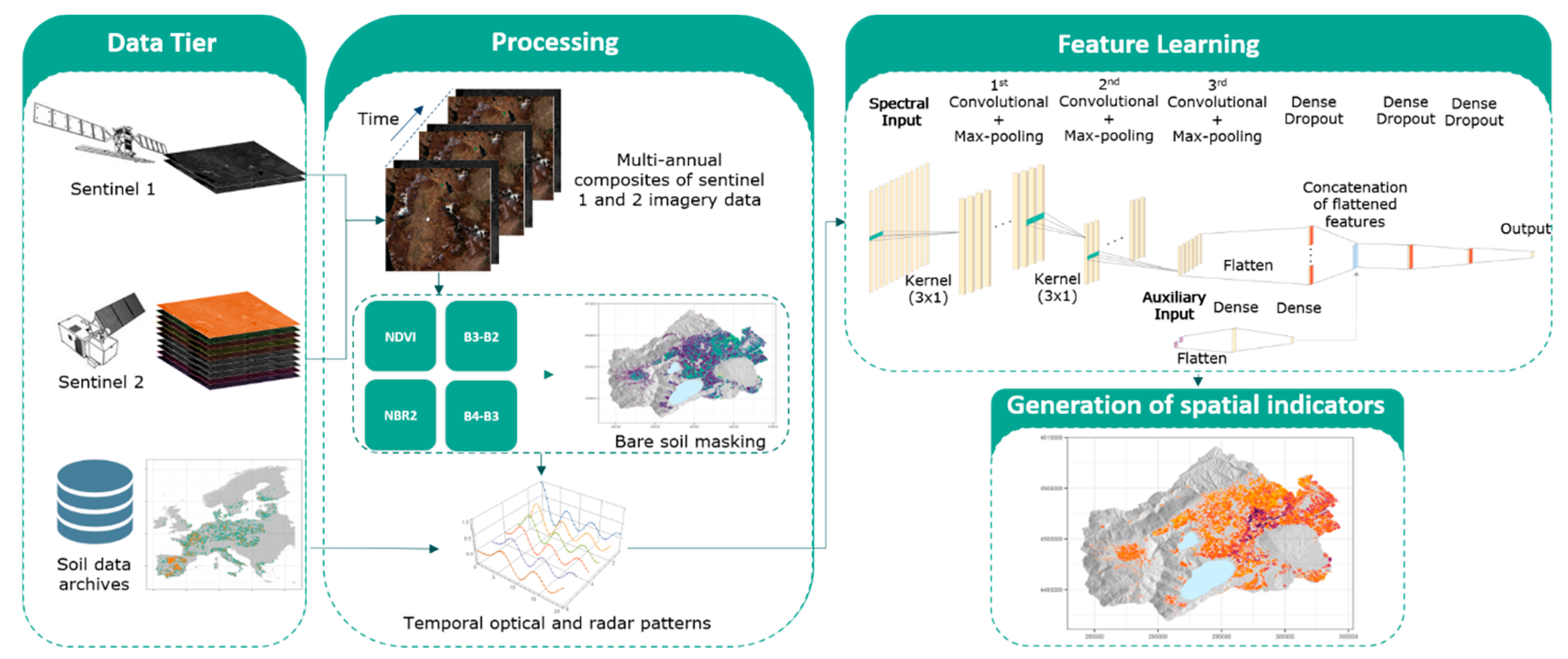
2.3.1. Convolution Neural Network for Soil Attributes Mapping
2.3.2. Model Interpretability of CNN
2.3.3. Competing Modeling Approaches and Additional Experiments
2.3.4. Dataset Partition
2.3.5. Evaluation of the Models
2.4. Implementation
3. Results
3.1. Times Series Preliminary Analysis
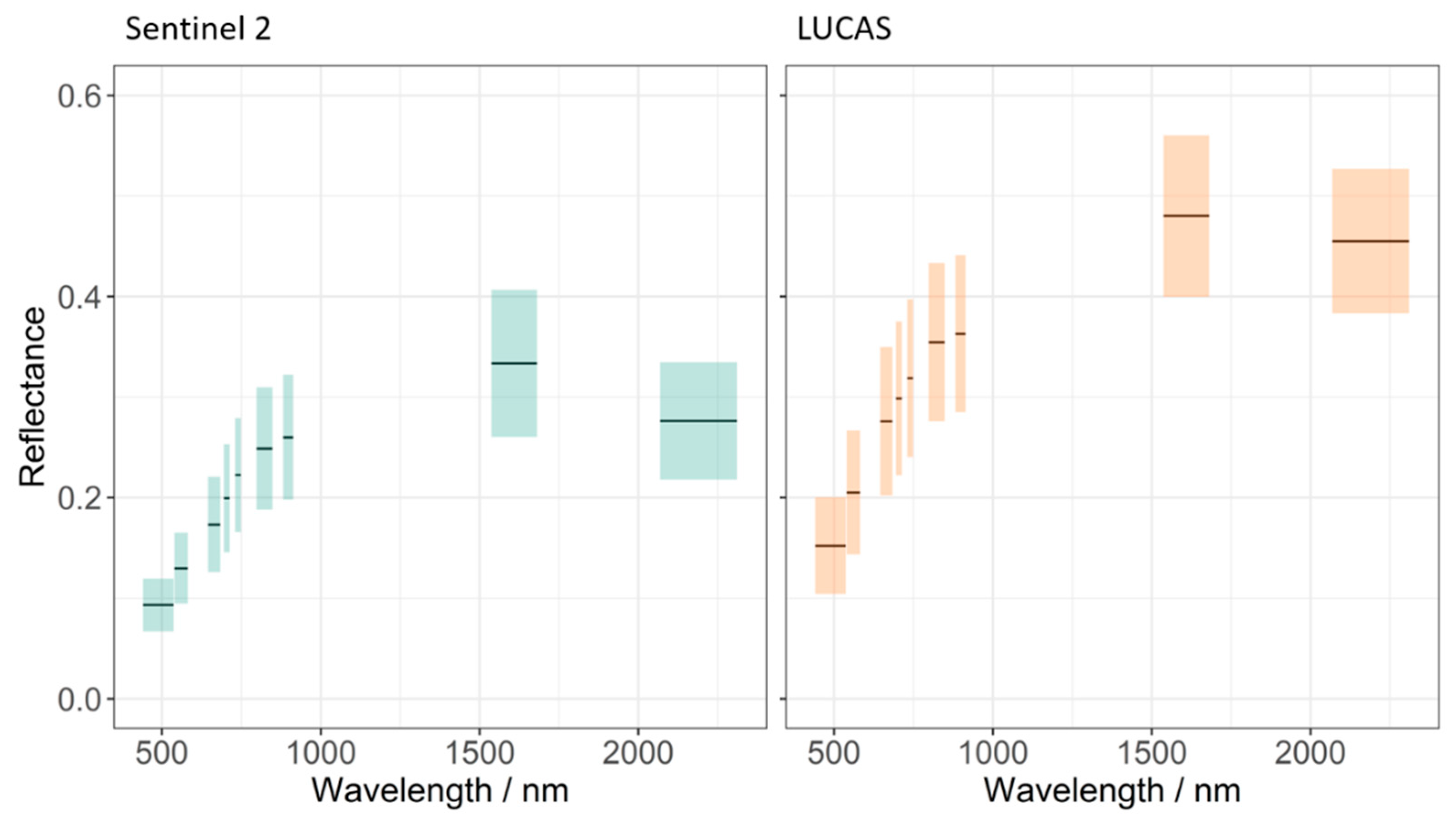
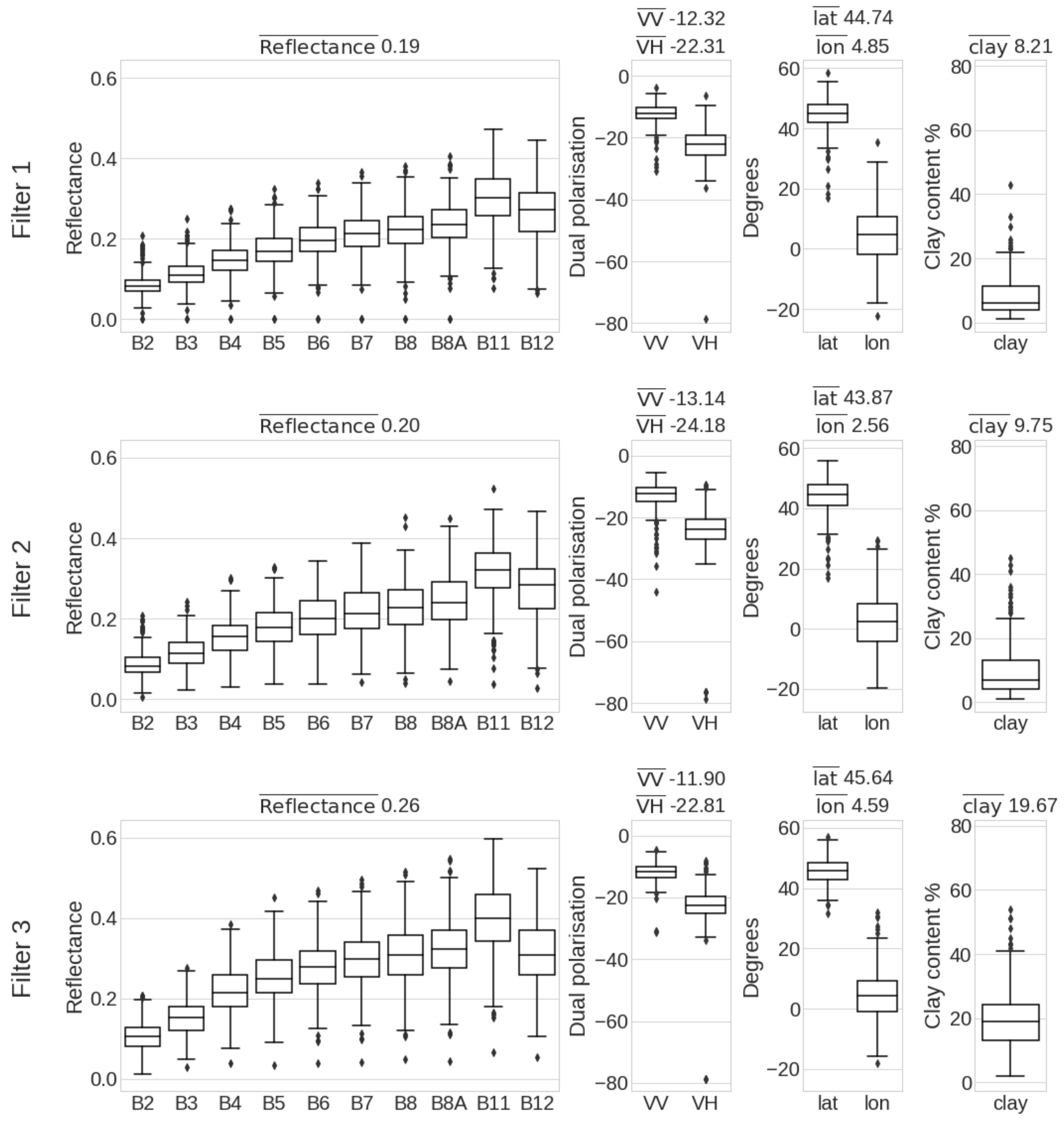
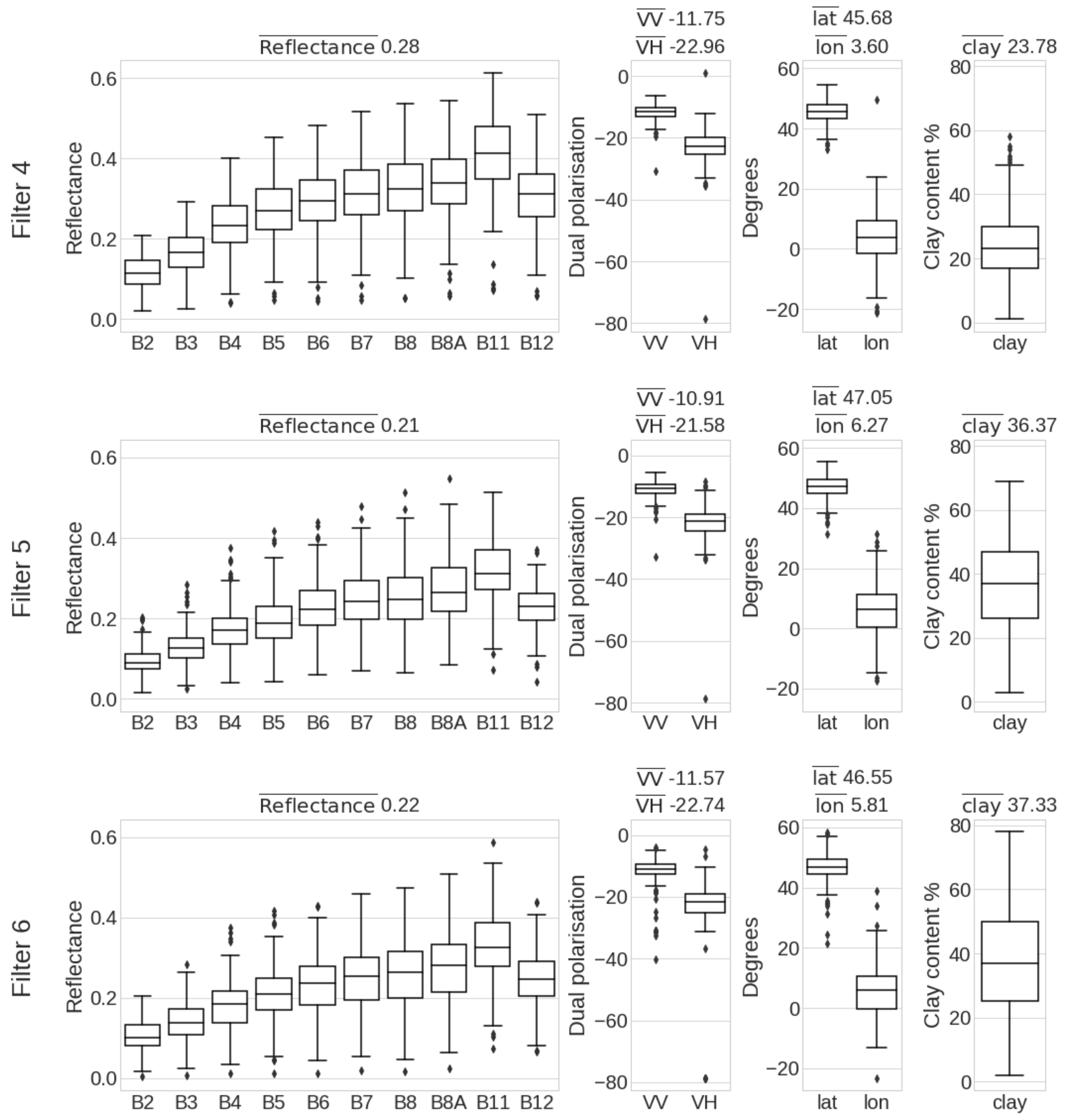
3.2. Bare Soil Spectral Pattern from LUCAS and Sentinel-2 Data
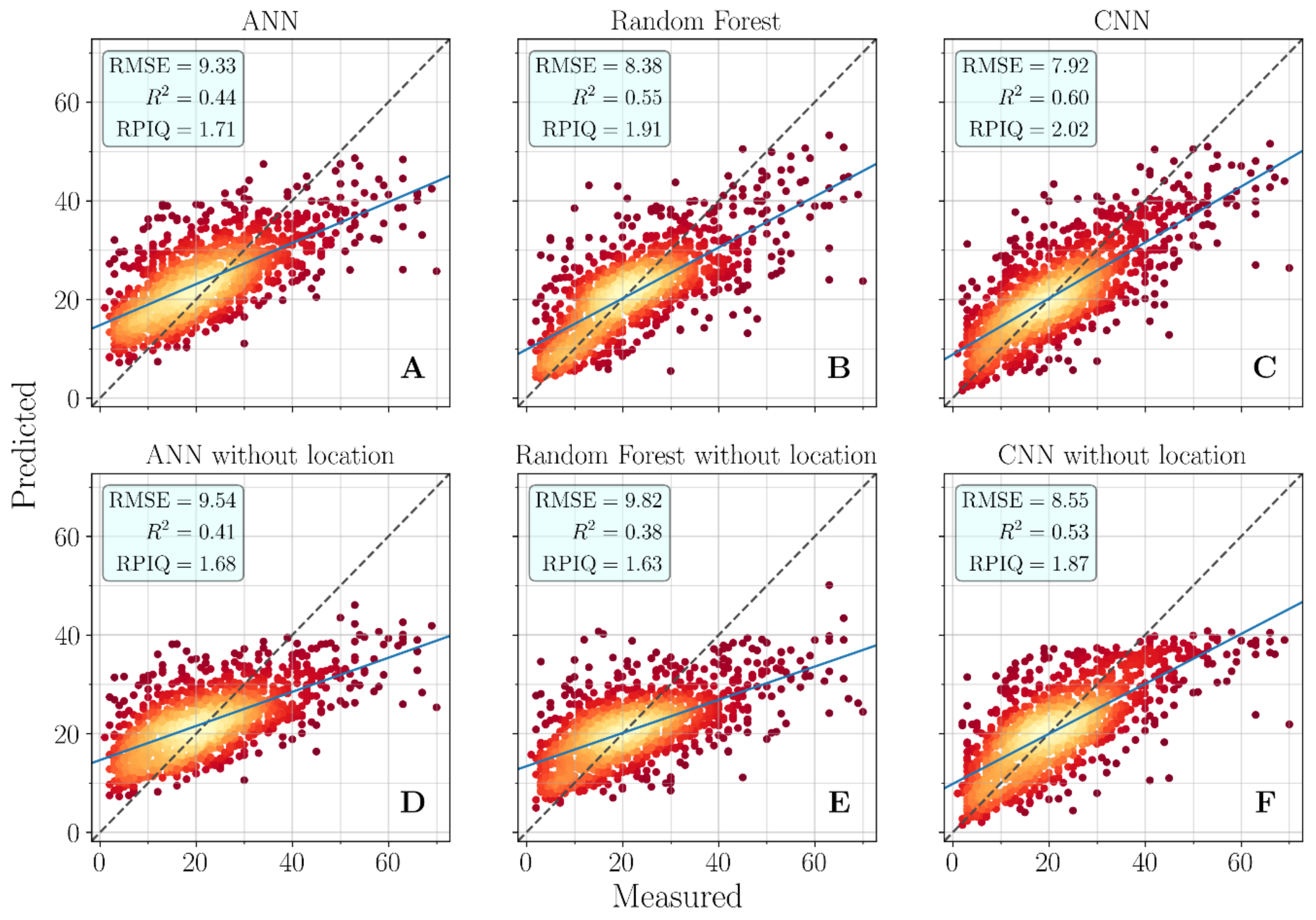
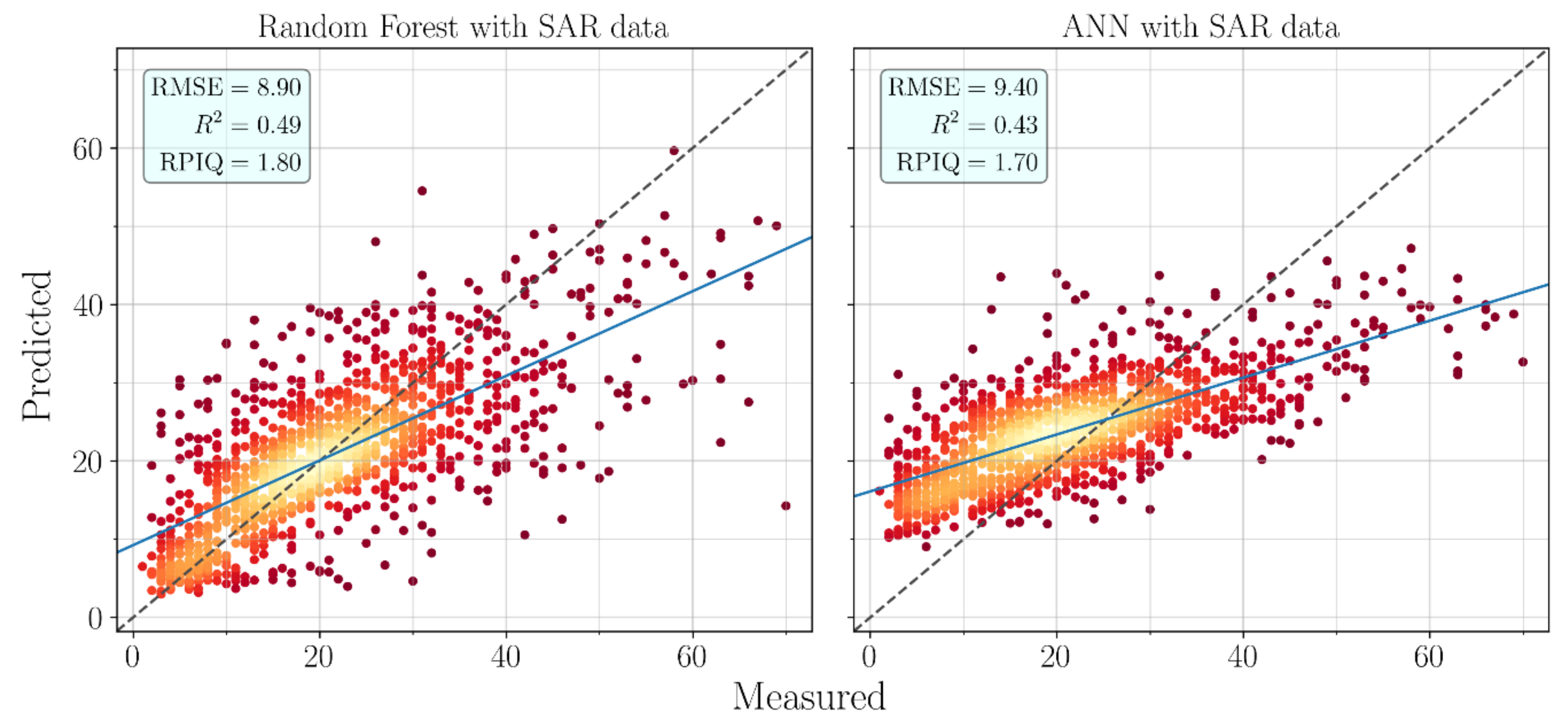
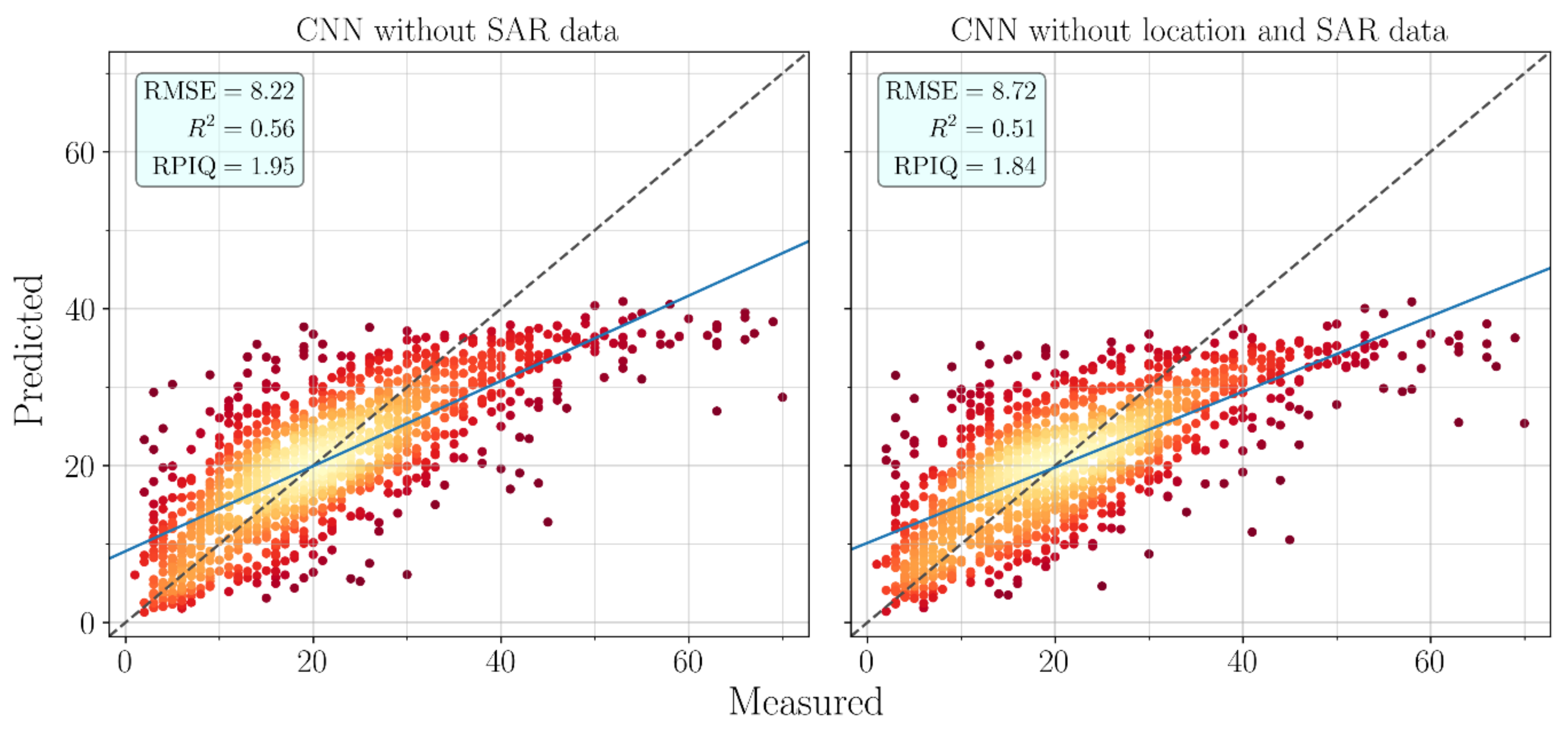
3.3. Prediction Performance
3.4. Interpretability of the Multi-Input CNN Model
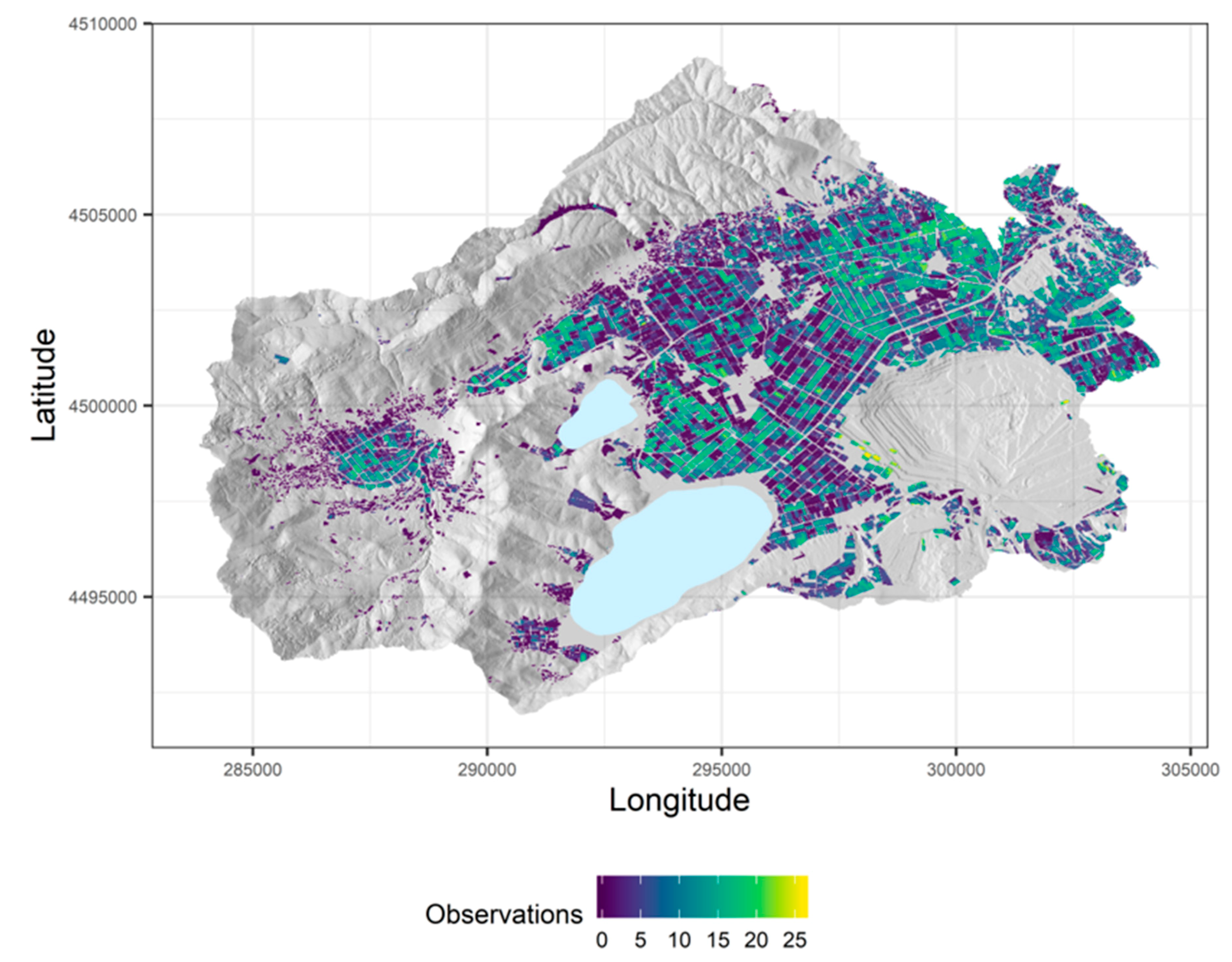
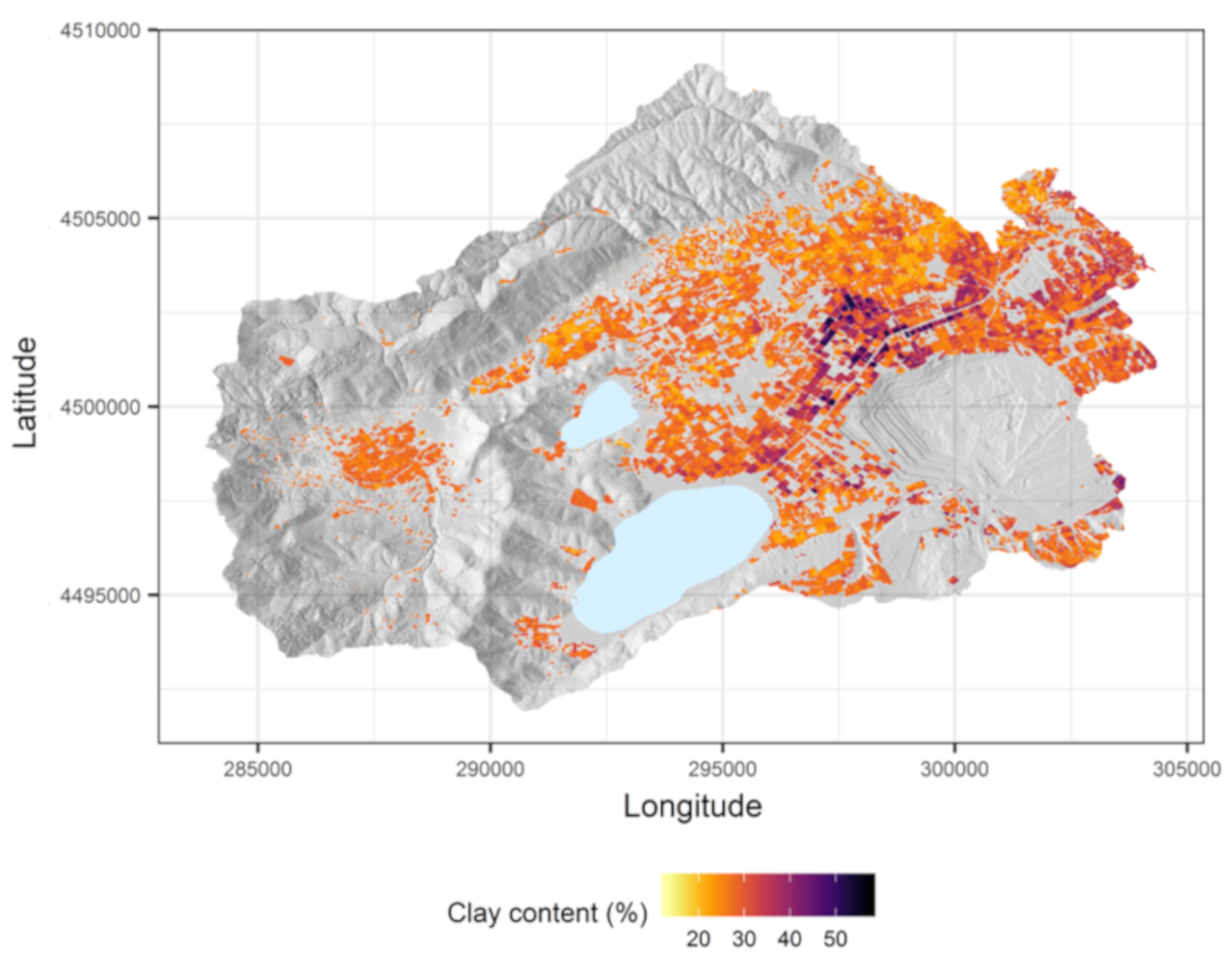
3.5. Surface Mapping of Soil Attributes
4. Discussion
4.1. EO Regression Analysis with the Use of Convolutional Neural Networks and Synergistic Use of Optical and SAR Data
4.2. Feature Importance
4.3. Comparison with Current State-of-the Art Regression Algorithms
4.4. Perspective of Embedding New Reference Soil Databases and Additional Spectral Information
4.5. Towards an EO-Based Soil Monitoring System
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| CNN | Convolutional Neural Network |
| CHIME | Copernicus Hyperspectral Imaging Mission |
| eLU | Exponential Linear Unit |
| EO | Earth Observation |
| FAO | Food and Agriculture Organization |
| GEE | Google Earth Engine |
| LSTM | Land Surface Temperature |
| LUCAS | Land Use and Coverage Area Frame Survey |
| MSI | Multi-Spectral Instrument |
| NASA | National Aeronautics and Space Administration |
| NDVI | Normalized Difference Vegetation Index |
| NBR2 | Normalized Burn Ratio Index |
| PRISMA | Precursore Iperspettrale della Missione Applicativa |
| R2 | Coefficient of Determination |
| ReLU | Rectified Linear Unit |
| RF | Random Forest |
| RMSE | Root-Mean-Square Error |
| RPIQ | Ratio of Performance of Interquartile Range |
| S2MoS | Sentinel-based Soil Monitoring Scheme |
| SAR | Synthetic Aperture Radar) |
| SBG | Surface Biology and Geology |
| SOC | Soil Organic Carbon |
| SSL | Soil Spectral Library |
| SWIR | Short Wave Infrared |
| VNIR | Visible Near Infrared |
Glossary
| Term | Definition |
| Activation Function | A nonlinear activation function applied to CNN’s layers to allow the learning of complex decision boundaries. Commonly used functions include sigmoid, tanh, ReLU and variants of these. |
| Adam | An adaptive learning rate algorithm where updates are directly estimated using a running average of the first and second moment of the gradient and also includes a bias correction term. |
| Dropout | A regularization technique for CNNs that prevents overfitting. |
| Max-pooling | Pooling layers help to reduce the dimensionality of a representation by keeping only the most salient information. |
| Regularizer | Regularizers allow one to apply penalties on layer parameters or layer activity during optimization. These penalties are incorporated in the loss function that the network optimizes. |
Appendix A

Appendix B

References
- Montanarella, L.; Pennock, D.J.; McKenzie, N.; Badraoui, M.; Chude, V.; Baptista, I.; Mamo, T.; Yemefack, M.; Aulakh, M.S.; Yagi, K.; et al. World’s soils are under threat. SOIL 2016. [Google Scholar] [CrossRef]
- Dai, Y.; Shangguan, W.; Wei, N.; Xin, Q.; Yuan, H.; Zhang, S.; Liu, S.; Lu, X.; Wang, D.; Yan, F. A review of the global soil property maps for Earth system models. SOIL 2019, 5, 137–158. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Hengl, T.; De Jesus, J.M.; Heuvelink, G.B.M.; Gonzalez, M.R.; Kilibarda, M.; Blagotić, A.; Shangguan, W.; Wright, M.N.; Geng, X.; Bauer-Marschallinger, B.; et al. SoilGrids250m: Global gridded soil information based on machine learning. PLoS ONE 2017, 12. [Google Scholar] [CrossRef]
- Behrens, T.; Schmidt, K.; MacMillan, R.A.; Viscarra Rossel, R.A. Multi-scale digital soil mapping with deep learning. Sci. Rep. 2018, 8. [Google Scholar] [CrossRef]
- Padarian, J.; Minasny, B.; McBratney, A.B. Using deep learning for digital soil mapping. SOIL 2019, 5, 79–89. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Padarian, J.; Minasny, B. Multi-source data integration for soil mapping using deep learning. SOIL 2019, 5, 107–119. [Google Scholar] [CrossRef]
- Behrens, T.; Schmidt, K.; MacMillan, R.A.; Viscarra Rossel, R.A. Multiscale contextual spatial modelling with the Gaussian scale space. Geoderma 2018, 310, 128–137. [Google Scholar] [CrossRef]
- Tsakiridis, N.L.; Keramaris, K.D.; Theocharis, J.B.; Zalidis, G.C. Simultaneous prediction of soil properties from VNIR-SWIR spectra using a localized multi-channel 1-D convolutional neural network. Geoderma 2020, 367, 114208. [Google Scholar] [CrossRef]
- Angelopoulou, T.; Tziolas, N.; Balafoutis, A.; Zalidis, G.; Bochtis, D. Remote Sensing Techniques for Soil Organic Carbon Estimation: A Review. Remote Sens. 2019, 11, 676. [Google Scholar] [CrossRef]
- Castaldi, F.; Hueni, A.; Chabrillat, S.; Ward, K.; Buttafuoco, G.; Bomans, B.; Vreys, K.; Brell, M.; van Wesemael, B. Evaluating the capability of the Sentinel 2 data for soil organic carbon prediction in croplands. ISPRS J. Photogramm. Remote Sens. 2019, 147, 267–282. [Google Scholar] [CrossRef]
- Vaudour, E.; Gomez, C.; Fouad, Y.; Lagacherie, P. Sentinel-2 image capacities to predict common topsoil properties of temperate and Mediterranean agroecosystems. Remote Sens. Environ. 2019, 223, 21–33. [Google Scholar] [CrossRef]
- Tziolas, N.; Tsakiridis, N.L.; Ogen, Y.; Kalopesa, E.; Ben-Dor, E.; Theocharis, J.B.; Zalidis, G.C. An integrated methodology using open soil spectral libraries and Earth Observation data for soil organic carbon estimations in support of soil-related SDGs. Remote Sens. Environ. 2020, 245. [Google Scholar] [CrossRef]
- Gholizadeh, A.; Žižala, D.; Saberioon, M.; Borůvka, L. Soil organic carbon and texture retrieving and mapping using proximal, airborne and Sentinel-2 spectral imaging. Remote Sens. Environ. 2018, 218, 89–103. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Pelletier, C.; Gorrab, A.; Lili-Chabaane, Z.; Baghdadi, N.; Ben Aissa, N.; Mougenot, B. Soil Texture Estimation Using Radar and Optical Data from Sentinel-1 and Sentinel-2. Remote Sens. 2019, 11, 1520. [Google Scholar] [CrossRef]
- Baghdadi, N.; El Hajj, M.; Choker, M.; Zribi, M.; Bazzi, H.; Vaudour, E.; Gilliot, J.-M.; Ebengo, M.D. Potential of Sentinel-1 Images for Estimating the Soil Roughness over Bare Agricultural Soils. Water 2018, 10, 131. [Google Scholar] [CrossRef]
- Diek, S.; Schaepman, E.M.; de Jong, R. Creating Multi-Temporal Composites of Airborne Imaging Spectroscopy Data in Support of Digital Soil Mapping. Remote Sens. 2016, 8, 906. [Google Scholar] [CrossRef]
- Rogge, D.; Bauer, A.; Zeidler, J.; Mueller, A.; Esch, T.; Heiden, U. Building an exposed soil composite processor (SCMaP) for mapping spatial and temporal characteristics of soils with Landsat imagery (1984–2014). Remote Sens. Environ. 2018, 205, 1–17. [Google Scholar] [CrossRef]
- Demattê, J.A.M.; Fongaro, C.T.; Rizzo, R.; Safanelli, J.L. Geospatial Soil Sensing System (GEOS3): A powerful data mining procedure to retrieve soil spectral reflectance from satellite images. Remote Sens. Environ. 2018, 212, 161–175. [Google Scholar] [CrossRef]
- Kopačková, V.; Ben-Dor, E. Normalizing reflectance from different spectrometers and protocols with an internal soil standard. Int. J. Remote Sens. 2016, 37, 1276–1290. [Google Scholar] [CrossRef]
- Orgiazzi, A.; Ballabio, C.; Panagos, P.; Jones, A.; Fernández-Ugalde, O. LUCAS Soil, the largest expandable soil dataset for Europe: A review. Eur. J. Soil Sci. 2018, 69, 140–153. [Google Scholar] [CrossRef]
- Tóth, G.; Jones, A.; Montanarella, L. The LUCAS topsoil database and derived information on the regional variability of cropland topsoil properties in the European Union. Environ. Monit. Assess. 2013, 185, 7409–7425. [Google Scholar] [CrossRef] [PubMed]
- Fischer, G.; Nachtergaele, F.O.; Prieler, S.; Teixeira, E.; Tóth, G.; Van Velthuizen, H.; Verelst, L.; Wiberg, D. Global Agro-ecological Zones (GAEZ v3.0)-Model Documentation; FAO: Rome, Italy; IIASA: Laxenburg, Austria, 2012. [Google Scholar]
- Bouyoucos, G.J. Hydrometer Method Improved for Making Particle Size Analyses of Soils1. Agron. J. 1962, 54, 464–465. [Google Scholar] [CrossRef]
- Castaldi, F.; Chabrillat, S.; Don, A.; van Wesemael, B. Soil organic carbon mapping using LUCAS topsoil database and Sentinel-2 data: An approach to reduce soil moisture and crop residue effects. Remote Sens. 2019, 11. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A. Fine-resolution multiscale mapping of clay minerals in Australian soils measured with near infrared spectra. J. Geophys. Res. Earth Surf. 2011, 116. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Padarian, J.; Minasny, B.; McBratney, A.B. Using deep learning to predict soil properties from regional spectral data. Geoderma Reg. 2019, 16, e00198. [Google Scholar] [CrossRef]
- Malek, S.; Melgani, F.; Bazi, Y. One-dimensional convolutional neural networks for spectroscopic signal regression. J. Chemom. 2018, 32, e2977. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J.L. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015-Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Yosinski, J.; Clune, J.; Nguyen, A.; Fuchs, T.; Lipson, H. Understanding Neural Networks Through Deep Visualization. arXiv 2015, arXiv:1506.06579. [Google Scholar]
- Zhang, Q.; Zhu, S.-C. Visual Interpretability for Deep Learning: A Survey. Front. Inf. Technol. Electron. Eng. 2018, 19, 27–39. [Google Scholar] [CrossRef]
- Tsakiridis, N.L.; Theocharis, J.B.; Zalidis, G.C. DECO3RUM: A Differential Evolution learning approach for generating compact Mamdani fuzzy rule-based models. Expert Syst. Appl. 2017, 83, 257–272. [Google Scholar] [CrossRef]
- Barredo Arrieta, A.; Díaz-Rodríguez, N.; Del Ser, J.; Bennetot, A.; Tabik, S.; Barbado, A.; Garcia, S.; Gil-Lopez, S.; Molina, D.; Benjamins, R.; et al. Explainable Artificial Intelligence (XAI): Concepts, taxonomies, opportunities and challenges toward responsible AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gallo, C.B.; Demattê, A.M.J.; Rizzo, R.; Safanelli, L.J.; Mendes, D.S.W.; Lepsch, F.I.; Sato, V.M.; Romero, J.D.; Lacerda, P.C.M. Multi-Temporal Satellite Images on Topsoil Attribute Quantification and the Relationship with Soil Classes and Geology. Remote Sens. 2018, 10, 1571. [Google Scholar] [CrossRef]
- Rizzo, R.; Medeiros, L.G.; de Mello, D.C.; Marques, K.P.P.; de Mendes, W.S.; Quiñonez Silvero, N.E.; Dotto, A.C.; Bonfatti, B.R.; Demattê, J.A.M. Multi-temporal bare surface image associated with transfer functions to support soil classification and mapping in southeastern Brazil. Geoderma 2020, 361, 114018. [Google Scholar] [CrossRef]
- Kennard, R.W.; Stone, L.A. Computer Aided Design of Experiments. Technometrics 1969, 11, 137–148. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- R Development Core Team R: A Language and Environment for statIstical Computing; R Found. Stat. Comput.; Team RC: Vienna, Austria, 2013. [Google Scholar]
- Chollet, F. Keras. 2015. Available online: https://keras.io.
- Kuhn, M. Building Predictive Models in R Using the caret Package. J. Stat. Software, Artic. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Working Group WRB. World Reference Base for Soil Resources 2014, Update 2015; International World Soil Resources Reports No. 106; FAO: Rome, Italy, 2015. [Google Scholar]
- Loiseau, T.; Chen, S.; Mulder, V.L.; Román Dobarco, M.; Richer-de-Forges, A.C.; Lehmann, S.; Bourennane, H.; Saby, N.P.A.; Martin, M.P.; Vaudour, E.; et al. Satellite data integration for soil clay content modelling at a national scale. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101905. [Google Scholar] [CrossRef]
- Liu, L.; Ji, M.; Buchroithner, M. Transfer Learning for Soil Spectroscopy Based on Convolutional Neural Networks and Its Application in Soil Clay Content Mapping Using Hyperspectral Imagery. Sensors 2018, 18, 3169. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N.; Prabhat. Deep learning and process understanding for data-driven Earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- Stevens, A.; Nocita, M.; Tóth, G.; Montanarella, L.; van Wesemael, B. Prediction of Soil Organic Carbon at the European Scale by Visible and Near InfraRed Reflectance Spectroscopy. PLoS ONE 2013, 8, e66409. [Google Scholar] [CrossRef] [PubMed]
- Madejová, J.; Gates, W.P.; Petit, S. Chapter 5—IR Spectra of Clay Minerals. In Infrared and Raman Spectroscopies of Clay Minerals; Gates, W.P., Kloprogge, J.T., Madejová, J., Bergaya, F.B.T.-D.C.S., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; Volume 8, pp. 107–149. ISBN 1572-4352. [Google Scholar]
- Poppiel, R.R.; Lacerda, P.C.M.; Safanelli, L.J.; Rizzo, R.; Oliveira, P.M.; Novais, J.J.; Demattê, A.M.J. Mapping at 30 m Resolution of Soil Attributes at Multiple Depths in Midwest Brazil. Remote Sens. 2019, 11, 2905. [Google Scholar] [CrossRef]
- Castaldi, F.; Chabrillat, S.; van Wesemael, B. Sampling strategies for soil property mapping using multispectral Sentinel-2 and hyperspectral EnMAP satellite data. Remote Sens. 2019, 11. [Google Scholar] [CrossRef]
- Chabrillat, S.; Ben-Dor, E.; Cierniewski, J.; Gomez, C.; Schmid, T.; van Wesemael, B. Imaging Spectroscopy for Soil Mapping and Monitoring. Surv. Geophys. 2019, 40, 361–399. [Google Scholar] [CrossRef]
- Notesco, G.; Weksler, S.; Ben-Dor, E. Mineral Classification of Soils Using Hyperspectral Longwave Infrared (LWIR) Ground-Based Data. Remote Sens. 2019, 11, 1429. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring With Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2019, 57, 520–539. [Google Scholar] [CrossRef]
- Luo, Y.; Guan, K.; Peng, J. STAIR: A generic and fully-automated method to fuse multiple sources of optical satellite data to generate a high-resolution, daily and cloud-/gap-free surface reflectance product. Remote Sens. Environ. 2018, 214, 87–99. [Google Scholar] [CrossRef]
- Tsakiridis, N.L.; Chadoulos, C.G.; Theocharis, J.B.; Ben-Dor, E.C.; Zalidis, G. A three-level Multiple-Kernel Learning approach for soil spectral analysis. Neurocomputing 2020. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Proces. Syst. 2014, 3, 2672–2680. [Google Scholar]
- Viscarra Rossel, R.A.; Behrens, T.; Ben-Dor, E.; Brown, D.J.; Demattê, J.A.M.; Shepherd, K.D.; Shi, Z.; Stenberg, B.; Stevens, A.; Adamchuk, V.; et al. A global spectral library to characterize the world’s soil. Earth-Sci. Rev. 2016, 155, 198–230. [Google Scholar] [CrossRef]
- Tziolas, N.; Tsakiridis, N.; Ben-Dor, E.; Theocharis, J.; Zalidis, G. A memory-based learning approach utilizing combined spectral sources and geographical proximity for improved VIS-NIR-SWIR soil properties estimation. Geoderma 2019, 340. [Google Scholar] [CrossRef]
- Galeazzi, C.; Sacchetti, A.; Cisbani, A.; Babini, G. The PRISMA Program. IGARSS 2008—2008 IEEE Int. Geosci. Remote Sens. Symp. 2008, 4, IV-105. [Google Scholar]
- Killough, B. Overview of the open data cube initiative. Int. Geosci. Remote Sens. Symp. (IGARSS) 2018, 2018, 8629–8632. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title | Description of Data | Corresponding Variables |
|---|---|---|
| Multispectral Data | 42,113 individual Sentinel-2 optical satellite images from January 2017 until December 2019 over the European countries where the LUCAS campaign was performed in 2009, as well as 25 Sentinel-2 images over the test site in the Zazari river basin. | Surface reflectance data in cartographic geometry, normalized difference vegetation index (NDVI), normalized burn ratio index (NBR2); the indices are described in Section 2.2 |
| Radar Data | 79,605 Sentinel-1 polarimetric Synthetic Aperture Radar images over the same European countries, from January 2017 to June 2019, as well as 25 Sentinel-1 imagery data tiles over the test site in the Zazari river basin. | VV and VH data; H corresponds to horizontal and V to vertical polarization |
| Reference Soil Data | 8426 georeferenced agricultural soil samples from the LUCAS 2009 topsoil database and 52 samples from a legacy soil dataset in Greece | Soil granulometric (clay %) |
| Min | Q1 | Q2 | Q3 | Max | Mean | St.dev | |
|---|---|---|---|---|---|---|---|
| LUCAS | 1 | 16 | 23 | 32 | 79 | 24.61 | 12.79 |
| Greece | 10.90 | 17.30 | 57.50 | 59.00 | 60 | 41.59 | 20.20 |
| Type | Kernel Size (Channels × Width) | Filters | Channels | Width | Activation |
|---|---|---|---|---|---|
| Spectral input | - | - | 12 | 150 | - |
| Convolutional | 3 × 1 | 16 | 10 | 150 | ReLU |
| Max-pooling | 1 × 2 | - | - | 75 | - |
| Convolutional | 3 × 1 | 64 | 8 | 75 | ReLU |
| Max-pooling | 1 × 2 | - | - | 37 | - |
| Convolutional | 3 × 1 | 16 | 6 | 37 | ReLU |
| Max-pooling | 1 × 2 | - | - | 18 | - |
| Flatten | - | - | - | 1728 | - |
| Dense + Dropout | 16 | 3 | - | 8 | eLU |
| Auxiliary input | - | - | - | 2 | - |
| Dense | - | - | - | 8 | - |
| Dense | - | - | - | 4 | |
| Concatenation | - | - | - | - | - |
| Dense + Dropout | - | - | - | 64 | eLU |
| Dense + Dropout | - | - | - | 16 | eLU |
| Flatten | - | - | - | 1 | tanh |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tziolas, N.; Tsakiridis, N.; Ben-Dor, E.; Theocharis, J.; Zalidis, G. Employing a Multi-Input Deep Convolutional Neural Network to Derive Soil Clay Content from a Synergy of Multi-Temporal Optical and Radar Imagery Data. Remote Sens. 2020, 12, 1389. https://doi.org/10.3390/rs12091389
Tziolas N, Tsakiridis N, Ben-Dor E, Theocharis J, Zalidis G. Employing a Multi-Input Deep Convolutional Neural Network to Derive Soil Clay Content from a Synergy of Multi-Temporal Optical and Radar Imagery Data. Remote Sensing. 2020; 12(9):1389. https://doi.org/10.3390/rs12091389
Chicago/Turabian StyleTziolas, Nikolaos, Nikolaos Tsakiridis, Eyal Ben-Dor, John Theocharis, and George Zalidis. 2020. "Employing a Multi-Input Deep Convolutional Neural Network to Derive Soil Clay Content from a Synergy of Multi-Temporal Optical and Radar Imagery Data" Remote Sensing 12, no. 9: 1389. https://doi.org/10.3390/rs12091389
APA StyleTziolas, N., Tsakiridis, N., Ben-Dor, E., Theocharis, J., & Zalidis, G. (2020). Employing a Multi-Input Deep Convolutional Neural Network to Derive Soil Clay Content from a Synergy of Multi-Temporal Optical and Radar Imagery Data. Remote Sensing, 12(9), 1389. https://doi.org/10.3390/rs12091389